EP0621161A1 - Verfahren zum Ermitteln der Auflaufkraft eines Anhängers - Google Patents
Verfahren zum Ermitteln der Auflaufkraft eines Anhängers Download PDFInfo
- Publication number
- EP0621161A1 EP0621161A1 EP94100842A EP94100842A EP0621161A1 EP 0621161 A1 EP0621161 A1 EP 0621161A1 EP 94100842 A EP94100842 A EP 94100842A EP 94100842 A EP94100842 A EP 94100842A EP 0621161 A1 EP0621161 A1 EP 0621161A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- force
- determined
- trailer
- horizontal
- truck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/20—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger specially for trailers, e.g. in case of uncoupling of or overrunning by trailer
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S280/00—Land vehicles
- Y10S280/04—Grocery store cart
Definitions
- the present invention relates to a method according to the preamble of claim 1, by means of which the overrun force exerted by a trailer on a towing vehicle during braking can be determined.
- the term “trailer” is understood to mean both a conventional trailer which is coupled to the trailer coupling of a conventional truck via a drawbar, and a semi-trailer which is connected to the fifth wheel coupling of a tractor unit.
- the trailer In the case of a truck or a tractor unit, the trailer (or the semitrailer) is supplied with the brake pressure required for braking via an air pressure line or the like. Ideally, this brake pressure should be set or regulated so that the trailer decelerates with exactly the same brake acceleration as its towing vehicle.
- Such a matching braking behavior of trailer and towing vehicle has the essential advantage that the braking process can be controlled very precisely and neither trailer nor towing vehicle can break out. At most, it is permissible to choose a slightly larger braking deceleration than that of the towing vehicle, since in such a case the braking process can still be controlled and, on the other hand, the maintenance-intensive brakes of the towing vehicle are protected accordingly.
- the invention has for its object to develop a method according to the preamble of claim 1 such that the respective overrun force can be determined at significantly lower costs.
- the invention is based on the idea that the respective or instantaneous value of the overrun force can possibly also be derived from the measurement signals already present in modern towing vehicles without measuring the overrun force directly by means of a force transducer, so that one is not required and the costs for determining the overrun force are limited to the use of a correspondingly designed or modified control unit. Since the run-up force can only be calculated by a suitable change in the central control program, especially when a central computer is present - as is always the case with modern train tickets - it may even be possible to reduce the costs for this to a negligible value.
- the Run-up force F k determined according to the teaching of claim 2 using the following equation:
- F1 is the front axle load of the truck, with F2 its rear axle load, with F a the braking force, with a the braking acceleration and with g the acceleration due to gravity. Due to the air suspension now common in modern trucks, the values F1 and F2 of the front and rear axle loads can be detected or measured very easily from the air pressure of the suspension on the axle in question; these quantities of the equation are thus known.
- the value F a of the braking force can be determined from the position of the brake pedal or from the instantaneous brake pressure; finally, the actual (braking) acceleration is also known from the output signals of the sensors of the anti-lock braking system (ABS). Since the acceleration due to gravity g is a constant, the value of the run-up force can consequently be determined from the equation mentioned without using a corresponding force transducer or force sensor.
- the value F a of the braking force can be determined, for example, on the basis of the braking pressure, there is a problem in practice in that this measured variable only allows an indirect determination of the braking power actually applied. Depending on the state of wear and the temperature of the brake, the actual braking power will deviate from a certain target value, so that the value F a with a corresponding uncertainty is afflicted. In order to keep the influence of the uncertainty of the measured variable F a on the result of the calculation as low as possible, it is proposed according to the development of the invention specified in claim 3 to also determine the moment balance related to the center of gravity (hereinafter referred to as S ) of the truck .
- S moment balance related to the center of gravity
- the values of x1 and x2 can be determined according to a particular aspect of the invention in a simple manner according to the teaching of claim 4 in that the torque balance is determined at the time at which the truck rolls in the acceleration-free state, since in this case from the Center distance or wheelbase a simple calculation is possible, as is apparent from the description of the figures in detail.
- the rolling state of the truck can easily be derived, for example, from the output signals of an electronic diesel injection device ("Electronic Diesel Control - EDC") and thus represents a measured variable.
- the relative vertical position y12 the axles of the truck in contrast, can be determined according to the teaching of claim 5 using the following formula: Since the somewhat uncertain value F a is comparatively little included in this formula, the result of y12 and therefore even more so that of F k is relatively accurate. Otherwise, according to a further essential aspect of the invention, the formula mentioned can also be calculated several times and the mean value can then be calculated therefrom.
- the towing vehicle is a tractor unit with a fifth wheel coupling, in which consequently the run-up force F k of the trailer acts both in the horizontal and in the vertical direction and is thus composed of two components F kx and F ky
- the ratio F kx / F ky of the horizontal to the vertical component of the run-up force can be compared with the ratio a / g of the vehicle acceleration a to the acceleration due to gravity g . If the determined ratio F kx / F ky is approximately the same as the ratio a / g , the braking power of the semi-trailer is set correctly, while a negative or positive comparison result indicates an approaching or pulling semi-trailer.
- the ratio F kx / F ky can be determined according to the teaching of claim 8 using the following formula: in which with F1 the front axle load of the tractor unit, with F2 their rear axle load, with m z their mass, with F a the braking force, with a the braking acceleration and with g the acceleration due to gravity.
- F1 the front axle load of the tractor unit
- F2 their rear axle load
- m z their mass
- F a the braking force with a the braking acceleration
- g acceleration due to gravity
- tractor units In the majority of cases, tractor units only have air suspension on the rear axle, while only a leaf or coil spring suspension is provided on the front axle. Accordingly stands on the front axle is no measure of the size of F1 available. In this case, it is possible according to the teaching of claim 9, the desired ratio F kx / F ky of the horizontal to the vertical component of the overrun force with additional consideration of the equilibrium of moments to determine, with a knowledge of the force F1 is not necessary here.
- the desired ratio F kx / F ky can be determined, for example, using the following equation: in which with F a the braking force, with y k and x k the relative vertical or horizontal position of the trailer coupling to the center of gravity S of the tractor unit and with x1, x2 and y12 the relative position of its axes to the center of gravity S are designated.
- F a the braking force
- y k and x k the relative vertical or horizontal position of the trailer coupling to the center of gravity S of the tractor unit
- x1, x2 and y12 the relative position of its axes to the center of gravity S are designated.
- the symbol * in Table 1 indicates that the measured value F a is subject to a certain degree of uncertainty, that is to say that it does not exactly express the actual braking force. This is due to the fact that depending on the state of wear and temperature of the brake, the actual braking power deviates from a specific target value, so that the value F a is associated with a corresponding uncertainty.
- the inaccuracy inherent in the measured value F a or its influence on the end result is reduced by additionally including the equilibrium of moments (equation 3).
- the desired run-up force F k can also be determined using the following equation:
- the quantities x1 and x2 can be determined from equation 3 when the measured values are input at the time when the vehicle is in the rolling, unaccelerated state, which in practice is easily obtained from the signal of an electronic diesel injection device ("Electronic Diesel Control - EDC") can be derived. Possibly. these values can also be recorded when the truck is currently stopping, or immediately after switching on the ignition. As already explained at the beginning, however, it must be taken into account in the latter case that this measurement only delivers correct values when there is no power, ie it is necessary for the truck to be completely disengaged. This would have to be checked by appropriate measurement signals.
- the values for x1 and x2 are based on the above assumption (unaccelerated state) as follows:
- the overrun force is calculated according to the teaching of the following exemplary embodiments.
- SZM tractor unit
- the run-up force F k of the trailer acts in both the horizontal and vertical directions and is therefore composed of two components F kx and F ky .
- the invention is based on the consideration that it is sufficient here to regulate the braking force of the trailer, the ratio F kx / F ky of the horizontal to the vertical component of the overrun force with the ratio Compare a / g of vehicle acceleration a to gravitational acceleration g .
- the braking power of the semi-trailer is largely set correctly, while a negative or positive comparison result characterizes an approaching or pulling semi-trailer.
- said forces F 1 and F 2 are determined in that the sum the detected forces of each individual axis are formed; as the horizontal coordinate of the relevant double or multiple axis (ie x1 or x2 ), the mean value is formed from the coordinates of all individual axes.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Regulating Braking Force (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
Description
- Die vorliegende Erfindung bezieht sich auf ein Verfahren gemäß dem Oberbegriff des Anspruchs 1, mittels dem die beim Bremsvorgang von einem Anhänger auf ein Zugfahrzeug ausgeübte Auflaufkraft ermittelt werden kann. Erfindungsgemäß ist dabei unter dem Begriff "Anhänger" sowohl ein herkömmlicher Anhänger zu verstehen, der über eine Deichsel mit der Anhängerkupplung eines herkömmlichen Lastkraftwagens gekoppelt ist, als auch ein Sattelauflieger, der mit der Sattelkupplung einer Sattelzugmaschine verbunden ist.
- Bei einem Lastkraftwagen oder einer Sattelzugmaschine wird dem Anhänger (bzw. dem Sattelauflieger) über eine Luftdruckleitung oder dergleichen der zum Bremsen erforderliche Bremsdruck zugeführt. Dieser Bremsdruck sollte im Idealfall so eingestellt bzw. geregelt sein, daß der Anhänger mit genau der gleichen Bremsbeschleunigung verzögert wie sein Zugfahrzeug. Ein derart übereinstimmendes Bremsverhalten von Anhänger und Zugfahrzeug hat den wesentlichen Vorteil, daß der Bremsvorgang sehr genau steuerbar ist und weder Anhänger noch Zugfahrzeug ausbrechen können. Es ist allenfalls zulässig, die Bremverzögerung des Anhängers geringfügig größer zu wählen als die des Zugfahrzeugs, da in einem solchen Fall einerseits der Bremsvorgang noch beherrschbar ist und andererseits die wartungsintensiveren Bremsen des Zugfahrzeugs entsprechend geschont werden.
- Da sich die Bremsleistung der Bremsen des Anhängers im Laufe der Zeit in einem anderen Umfang ändert als die des Zugfahrzeugs, kann das wie oben erläutert gewünschte Verhältnis der Bremsleistung von Anhänger und Zugfahrzeug nur bei Einhaltung relativ kurzer Serviceintervalle gewährleistet werden. Darüber hinaus ist zu beachten, daß sich das Gewicht des Anhängers in Abhängigkeit von der jeweiligen Beladung ändert, so daß eine genaue Einstellung ohnehin nur dann möglich ist, wenn eine sogenannte automatische lastabhängige Bremseinrichtung ("ALB") vorhanden ist, was jedoch nur bei modernen Anhängern der Fall ist. Um diese Nachteile zu vermeiden wird daher in letzter Zeit angestrebt, die Bremskraft bzw. -leistung des Anhängers im Fahrbetrieb in Abhängigkeit von der Bremsleistung des Zugfahrzeugs auf dem jeweils optimalen Wert durch Regelung des dem Anhänger zugeführten Bremsdrucks konstant zu halten.
- Eine derartige Regelung der Bremsleistung des Anhängers ist jedoch nur dann möglich, wenn diejenige Kraft gemessen wird, mit der der Auflieger beim Bremsen auf die Kupplung des Zugfahrzeugs einwirkt. Diese üblicherweise als "Auflaufkraft" bezeichnete Krafteinwirkung des Anhängers sollte demzufolge bei dem o.g. Idealfall gleich Null sein oder allenfalls einen geringfügig negativen Wert aufweisen. Bei Kenntnis bzw. Messung der Auflaufkraft ist es daher relativ einfach, den Bremsdruck des Anhängers solange zu ändern, bis die Auflaufkraft schließlich den gewünschten Wert erreicht.
- Zur Messung der Auflaufkraft muß indes an der betreffenden Kupplung ein Kraftaufnehmer bzw. eine Kraftmeßdose installiert werden; aufgrund des sehr hohen Werts, den die Koppelkraft in der Praxis annehmen kann, ist der Preis für einen derartigen Kraftaufnehmer bzw. Sensor vergleichsweise hoch und kann durchaus in der Größenordnung von mehreren Tausend DM liegen. Trotz der mit der Regelung der Bremsleistung des Anhängers verbundenen Vorteile wurde aufgrund dieser hohen Kosten bislang weitgehend darauf verzichtet.
- Der Erfindung liegt die Aufgabe zugrunde, ein Verfahren gemäß dem Oberbegriff des Anspruchs 1 derart weiterzubilden, daß die jeweilige Auflaufkraft mit wesentlich geringeren Kosten ermittelt werden kann.
- Diese Aufgabe wird erfindungsgemäß mit dem im Kennzeichnungsteil des Anspruchs 1 angegebenen Maßnahmen gelöst.
- Die Erfindung geht von dem Gedanken aus, daß der jeweilige bzw. momentane Wert der Auflaufkraft ggf. auch aus den bei modernen Zugfahrzeugen bereits vorhandenen Meßsignalen abgeleitet werden kann, ohne die Auflaufkraft direkt mittels eines Kraftaufnehmers zu messen, so daß ein solcher nicht benötigt wird und sich die Kosten für die Ermittlung der Auflaufkraft auf den Einsatz einer entsprechend konstruierten oder modifizierten Steuereinheit beschränken. Da die Auflaufkraft insbesondere bei Vorhandensein eines Zentralrechners - wie dies bei modernen Zugfahrzeigen stets der Fall ist - lediglich durch geeignete Anderung des zentralen Steuerprogramms errechnet werden kann, ist es ggf. sogar möglich, die Kosten hierfür auf einen vernachlässigbaren Wert zu senken.
- Erfindungsgemäß wird nun zum Erreichen des genannten Ziels vorgeschlagen, die am Zugfahrzeug bereits vorhandenen Meßwerte in der Weise heranzuziehen, daß [a] das Kräftegleichgewicht der am Zugfahrzeug in vertikaler bzw. y-Richtung wirkenden Kräfte bestimmt wird, daß [b] das Kräftegleichgewicht der am Zugfahrzeug in horizontaler bzw. x-Richtung wirkenden Kräfte bestimmt wird und daß [c] aus dem derart bestimmten vertikalen und horizontalen Kräftegleichgewicht die Auflaufkraft ermittelt wird. Es wurde gefunden, daß es die bei moderenen Zugfahrzeugen vorhandenen Meßwerte erlauben, anhand dieser Kräftegleichgewichte den jeweiligen Wert für die Auflaufkraft relativ genau zu berechnen. Im einzelnen werden folgende Verfahren von der Erfindung bevorzugt:
- Wenn es sich bei dem Zugfahrzeug um einen herkömmlichen Lastkraftwagen (LKW) mit Anhängerkupplung handelt, d.h. also nicht um eine Sattelzugmaschine, so daß folglich die Auflaufkraft (nachfolgend mit F k bezeichnet) des Anhängers ausschließlich in horizontaler bzw. x-Richtung wirkt, wird die Auflaufkraft F k gemäß der Lehre des Anspruchs 2 mittels folgender Gleichung ermittelt:

In dieser Formel ist mit F₁ die Vorderachslast des Lastkraftwagens, mit F₂ seine Hinterachslast, mit F a die Bremskraft, mit a die Bremsbeschleunigung und mit g die Erdbeschleunigung bezeichnet. Aufgrund der bei modernen Lastkraftwagen nunmehr gebräuchlichen Luftfederung können aus dem Luftdruck der Federung an der betreffenden Achse die Werte F₁ und F₂ der Vorder- bzw. Hinterachslast sehr leicht erfaßt bzw. gemessen werden; diese Größen der Gleichung sind somit bekannt. Ebenso kann aus der Stellung des Bremspedals oder aus dem momentanten Bremsdruck der Wert F a der Bremskraft ermittelt werden; schließlich ist auch die tatsächliche (Brems-) Beschleunigung anhand der Ausgangssignale der Sensoren des Antiblockiersystems (ABS) bekannt. Da es sich bei der Erdbeschleunigung g um eine Konstante handelt, kann folglich aus der genannten Gleichung der Wert der Auflaufkraft ohne Verwendung eines entsprechenden Kraftaufnehmers bzw. Kraftsensors bestimmt werden. - Obgleich, wie vorstehend erläutert wurde, der Wert F a der Bremskraft beispielsweise anhand des Bremsdrucks ermittelt werden kann, liegt in der Praxis ein Problem darin, daß diese Meßgröße nur eine indirekte Bestimmung der tatsächlich aufgebrachten Bremsleistung zuläßt. Je nach Verschleißzustand und Temperatur der Bremse wird nämlich die tatsächliche Bremsleistung von einem bestimmten Sollwert abweichen, so daß der Wert F a mit einer entsprechenden Unsicherheit behaftet ist. Um den Einfluß der Unsicherheit der Meßgröße F a auf das Ergebnis der Berechnung so gering wie möglich zu halten, wird gemäß der im Anspruch 3 angegebenen Weiterbildung der Erfindung vorgeschlagen, auch das auf den Schwerpunkt (nachfolgend mit S bezeichnet) des Lastkraftwagens bezogene Momentengleichgewicht zu bestimmen. In diesem Fall ist es nämlich möglich, die Auflaufkraft F k mittels folgender Gleichung zu bestimmen:

in der mit x₁, x₂ und y₁₂ die jeweilige relative Lage der Achsen des Lastkraftwagens zu seinem Schwerpunkt S und mit y ak der vertikale Abstand der Kupplung zur Radachse bezeichnet sind. Der Wert y ak des vertikalen Abstands der Kupplung zur Radachse ist von der Geometrie des Fahrzeugs abhängig und damit eine lediglich einmal einzugebende Konstante (d.h. ein Eingabewert). - Die Werte von x₁ und x₂ lassen sich gemäß einem besonderen Aspekt der Erfindung auf einfache Weise gemäß der Lehre des Anspruchs 4 dadurch ermitteln, daß das Momentengleichgewicht zu dem Zeitpunkt bestimmt wird, zu dem der Lastkraftwagen im beschleunigungslosen Zustand rollt, da in diesem Fall aus dem Achsabstand bzw. Radstand eine einfache Berechnung möglich ist, wie aus der Figurenbeschreibung im einzelnen hervorgeht. Der Rollzustand des Lastkraftwagens kann auf einfache Weise z.B. von den Ausgangssignalen eines elektronischen Diesel-Einspritzgeräts ("Electronic Diesel Control - EDC") abgeleitet werden und stellt damit eine Meßgröße dar. Ggf. ist es auch möglich, die Werte von x₁ und x₂ auf gleiche Weise dann zu bestimmen, wenn der Lastkraftwagen steht oder geparkt ist; hier ist jedoch zu berücksichtigen, daß diese Messung nur dann korrekte Werte liefert, wenn in diesem Stopzustand eine Kräftefreiheit vorliegt, d.h. der Lastkraftwagen muß z.B. völlig ausgekuppelt sein.
- Die relative vertikale Lage y₁₂ der Achsen des Lastkraftwagens läßt sich demgegenüber gemaß der Lehre des Anspruchs 5 mittels folgender Formel ermitteln:

Da in diese Formel der etwas unsichere Wert F a vergleichsweise wenig eingeht, ist das Ergebnis von y₁₂ und damit erst recht das von F k relativ genau. Im übrigen kann gemäß einem weiteren wesentlichen Aspekt der Erfindung nach der Lehre des Anspruchs 6 die genannte Formel auch mehrfach berechnet und anschließend der Mittelwert hieraus errechnet werden. - Wenn es sich bei dem Zugfahrzeug demgegenüber um eine Sattelzugmaschine mit Sattelkupplung handelt, bei der folglich die Auflaufkraft F k des Aufliegers sowohl in horizontaler als auch in vertikaler Richtung wirkt und sich somit aus zwei Komponenten F kx und F ky zusammensetzt, kann gemäß der Lehre des Anspruchs 7 zur Regelung der Bremskraft des Aufliegers das Verhältnis F kx /F ky der horizontalen zur vertikalen Komponente der Auflaufkraft mit dem Verhältnis a/g der Fahrzeugbeschleunigung a zur Erdbeschleunigung g verglichen werden. Wenn nämlich das ermittelte Verhältnis F kx /F ky ungefähr genauso groß wie das Verhältnis a/g ist, ist die Bremsleistung des Sattelaufliegers genau richtig eingestellt, während ein negatives oder positives Vergleichsergebnis einen auflaufenden bzw. ziehenden Sattelauflieger kennzeichnen.
- Im einzelnen läßt sich das Verhältnis F kx /F ky nach der Lehre des Anspruchs 8 mittels folgender Formel ermitteln:

in der mit F₁ die Vorderachslast der Sattelzugmaschine, mit F₂ ihre Hinterachslast, mit m z ihre Masse, mit F a die Bremskraft, mit a die Bremsbeschleunigung und mit g die Erdbeschleunigung bezeichnet sind. Diese Größen sind entweder Konstante oder als Meßgrößen bekannt, wie bereits oben unter Bezugnahme auf die Gegebenheiten bei einem normalen Lastkraftwagen erläutert wurde. - In der Mehrzahl der Fälle besitzen Sattelzugmaschinen lediglich an der Hinterachse eine Luftfederung, während an der Vorderachse lediglich eine Blatt- oder Spiralfeder-Aufhängung vorgesehen ist. Demgemäß steht an der Vorderachse kein Meßwert für die Größe von F₁ zur Verfügung. In diesem Fall ist es nach der Lehre des Anspruchs 9 möglich, das gewünschte Verhältnis F kx /F ky der horizontalen zur vertikalen Komponente der Auflaufkraft unter zusätzlicher Berücksichtigung des Momentengleichgewichts zu bestimmen, wobei hier eine Kenntnis der Kraft F₁ nicht erforderlich ist. Nach der Lehre des Anspruchs 10 kann das gewünschte Verhältnis F kx /F ky beispielsweise nach folgender Gleichung ermittelt werden:

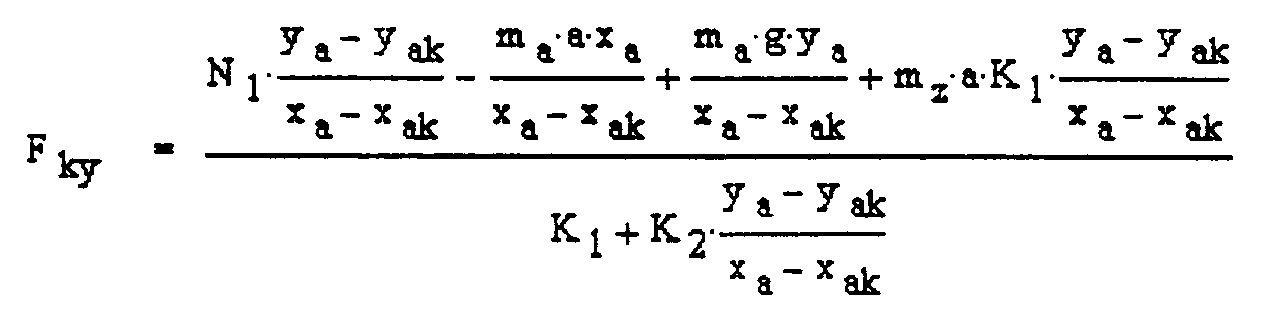
in der mit F a die Bremskraft, mit y k und x k die relative vertikale bzw. horizontale Lage der Aufliegerkupplung zum Schwerpunkt S der Sattelzugmaschine und mit x₁, x₂ und y₁₂ die jeweilige relative Lage seiner Achsen zum Schwerpunkt S bezeichnet sind. Hierbei ist zu beachten, daß bei einer Sattelzugmaschine im Gegensatz zu einem normalen Lastkraftwagen die Werte von x₁, x₂ und y₁₂ bekannt sind, da eine Sattelzugmaschine (mit Ausnahme vernachlässigbarer Größen, wie dem Tankinhalt etc.) stets in etwa das gleiche Gewicht aufweist, so daß diese Werte fahrzeugspezifisch sind und somit nur einmal bestimmt zu werden brauchen. - Da der Wert F a der Bremskraft, wie bereits erläutert wurde, mit einer nicht zu vermeidenden Unsicherheit behaftet ist, empfiehlt es sich jedoch, nach der Lehre des Anspruchs 11 folgende Gleichungen zur Berechnung des Verhältnisses F kx /F ky heranzuziehen:

wobei die Konstanten N₁, K₁ und K₂ wie folgt definiert sind:

Es ist ersichtlich, daß das Verhältnis F kx /F ky auf diese Weise ohne die Verwendung des unsicheren Meßwerts F a bestimmt werden kann, so daß das Ergebnis entsprechend genau ist. - Die Erfindung wird nachstehend anhand der Beschreibung von Ausführungsbeispielen unter Bezugnahme auf die Zeichnung näher erläutert. Es zeigen:
- Fig.1 eine Schemaskizze zur Erläuterung der bei einem Lastkraftwagen vorliegenden Kräfte- und Momenteverhältnisse bei angekoppeltem Anhänger;
- Fig.2 eine Schemaskizze zur Erläuterung der bei einer Sattelzugmaschine vorliegenden Kräfte- und Momenteverhältnisse bei angekoppeltem Sattelauflieger; und
- Fig.3 eine alternative Schemaskizze der beim Sattelauflieger gegebenen Verhältnisse.
- Nachfolgend wird zunächst ein Ausführungsbeispiel der Erfindung unter Bezugnahme auf Fig.1 erläutert, bei dem die Auflaufkraft für einen Lastkraftwagen (LKW) beschrieben wird. Zum besseren Verständnis des in der Fig.1 lediglich schematisch gezeigten Lastkraftwagens werden zunächst die dort angegebenen Geometriebeziehungen und Kraftwirkungen anhand nachfolgender Tabelle 1 aufgelistet:

- Mit dem Symbol * ist in der Tabelle 1 angedeutet, daß der Meßwert F a mit einer gewissen Unsicherheit behaftet ist, d.h. nicht genau die tatsächliche Bremskraft ausdrückt. Dies ist darauf zurückzuführen, daß je nach Verschleißzustand und Temperatur der Bremse die tatsächliche Bremsleistung von einem bestimmten Sollwert abweicht, so daß der Wert F a mit einer entsprechenden Unsicherheit behaftet ist.
- Aus der Fig.1 können die folgenden Gleichungen abgeleitet werden:
Kräftegleichgewicht der y-Komponenten:
Kräftegleichgewicht der x-Komponenten:
Momentengleichgewicht:

Durch geeignete Umformung der Gleichungen 1. und 2. läßt sich die gesuchte Größe der Auflaufkraft F k wie folgt angeben:
In dieser Gleichung sind alle Größen Meßwerte oder Konstante, so daß der Wert von F k bestimmt werden kann, und zwar ohne daß ein Sensor für die Auflaufkraft benötigt werden würde. - Gemäß einer zweiten Ausführungsform dieses ersten Ausführungsbeispiels der Erfindung wird die dem Meßwert F a innewohnende Ungenauigkeit bzw. deren Einfluß auf das Endergebnis durch zusätzliche Einbeziehung des Momentengleichgewichts (Gleichung 3) verringert.
- Unter Berücksichtigung der Tatsache, daß der vertikale Abstand der Anhängerkupplung zu den Achsen (y ak ) gemäß folgender Gleichung 4. in Beziehung zu den Größen y₁₂ und y k steht:

kann die gesuchte Auflaufkraft F k auch mittels folgender Gleichung bestimmt werden:
In dieser Formel lassen sich die Größen x₁ und x₂ aus der Gleichung 3 dann bestimmen, wenn die Eingabe der Meßwerte zu dem Zeitpunkt erfolgt, zu dem sich das Fahrzeug im rollenden, unbeschleunigten Zustand befindet, was in der Praxis leicht aus dem Signal eines elektronischen DieselEinspritzgeräts ("Electronic Diesel Control - EDC") abgeleitet werden kann. Ggf. können diese Werte auch dann erfaßt werden, wenn der Lastkraftwagen gerade anhält, oder auch unmittelbar nach Einschalten der Zündung. Wie bereits eingangs erläutert wurde, ist im letzteren Fall jedoch zu berücksichtigen, daß diese Messung nur dann korrekte Werte liefert, wenn eine Kräftefreiheit vorliegt, d.h. es ist erforderlich, daß der Lastkraftwagen völlig ausgekuppelt ist. Dies müßte somit durch entsprechende Meßsignale überprüft werden. - Die Werte für x₁ und x₂ lauten aufgrund der obigen Annahme (unbeschleunigter Zustand) somit wie folgt:

Die in der oben genannten Gleichung noch unbekannte Größe y₁₂ kann aus folgenden Umformungen abgeleitet werden:
aus 3.:

und 2.:

folgt:



jetzt noch mz aus 1. einsetzten:
yk wird als Mittelwert aus vielen Messungen F₁, F₂, Fa ermittelt:
Mit

folgt:

Da in diese Formel der etwas unsichere Wert F a vergleichsweise wenig eingeht und da darüber hinaus der Wert y k mehrfach berechnet und anschließend der Mittelwert hieraus errechnet wird, ist das Ergebnis von y₁₂ und damit erst recht das von F k relativ genau. Beispielsweise ist es auch möglich, die Berechnung von y k solange zu wiederholen, bis sich der Mittelwert kaum mehr ändert, so daß geschlossen werden kann, daß der Wert von F a weitgehend korrekt ist. - Wenn es sich bei dem Zugfahrzeug im Gegensatz zum ersten Ausführungsbeispiel um eine Sattelzugmaschine (SZM) mit Sattelkupplung handelt, wird die Auflaufkraft nach der Lehre der folgenden Ausführungsbeispiele berechnet. Zunächst werden nunmehr die in den auf diese Ausführungsbeispiele gerichteten Fig.2 und 3 gezeigten Kräfte und Geometriebeziehungen anhand folgender Tabelle 2 näher beschrieben.

- Aus einem Vergleich der Tabelle 1 mit obiger Tabelle 2 wird deutlich, daß bei einer Sattelzugmaschine im Gegensatz zu einem normalen Lastkraftwagen die Werte von x₁, x₂ und y₁₂ bekannt sind, da eine Sattelzugmaschine (mit Ausnahme vernachlässigbarer Größen, wie insbesondere dem Tankinhalt usw.) stets in etwa das gleiche Gewicht aufweist, so daß diese Werte als fahrzeugspezifisch anzusehen sind und somit nur einmal bestimmt zu werden brauchen (Eingabegröße).
- Im Falle einer Sattelzugmaschine wirkt die Auflaufkraft F k des Aufliegers sowohl in horizontaler als auch in vertikaler Richtung und setzt sich somit aus zwei Komponenten F kx und F ky zusammen. Um zu bestimmen, ob die Bremsleistung des Sattelaufliegers richtig eingestellt wird, geht die Erfindung von der Überlegung aus, daß es hierbei ausreichend ist, zur Regelung der Bremskraft des Aufliegers das Verhältnis F kx/ F ky der horizontalen zur vertikalen Komponente der Auflaufkraft mit dem Verhältnis a/g der Fahrzeugbeschleunigung a zur Erdbeschleunigung g vergleichen. Wenn nämlich das ermittelte Verhältnis F kx/ F ky ungefähr genauso groß wie das Verhältnis a/g ist, ist die Bremsleistung des Sattelaufliegers weitgehend korrekt eingestellt, während ein negatives oder positives Vergleichsergebnis einen auflaufenden bzw. ziehenden Sattelauflieger kennzeichnen.
- Die Kräfte- und Momentengleichgewichte lauten in diesem Falle wie folgt:
Kräftegleichgewicht der y-Komponenten:

Kräftegleichgewicht der x-Komponenten:

Momentengleichgewicht:

Wenn die Sattelzugmaschine auch an der Vorderachse mit einer Luftdruckfederung versehen ist, ist der Wert F₁ entgegen der Angabe in der Tabelle 2 keine Unbekannte, sondern vielmehr ein Meßwert. Dann läßt sich aus den beiden Gleichungen 1. und 2. des Kräftegleichgewichts der Wert für das zu bestimmende Verhältnis wie folgt ableiten:
Wenn ein Meßwert aufgrund fehlender Vorderachs-Luftfederung hingegen nicht zur Verfügung steht, so kann gemäß der ersten Ausführungsform des zweiten Ausführungsbeispiels, die anhand der Fig.2 beschrieben ist, das gesuchte Verhältnis wie folgt abgeleitet werden, indem Gleichung 1. nach F₁ aufgelöst, Gleichung 2. nach F kx aufgelöst und diese beiden Größen in Gleichung 3. eingesetzt werden und daraufhin nach F ky aufgelöst wird:




Damit ergibt sich das gesuchte Verhältnis wie folgt:
Diese aus den in den Fig.2 angenommenen Beziehungen abgeleitetet Formel hat den Nachteil, daß wiederum, wie im ersten Ausführungsbeispiel, die unsichere Größe F a auftaucht. Dieser Nachteil kann indes mittels der zweiten Ausführungsform dieses Ausführungsbeispiels gemäß der in der Fig.3 angegebenen Beziehung, die auch die Geometrie des Sattelaufliegers berücksichtigt, wie folgt umgangen werden: Aus dem Sattelauflieger ergeben sich folgende Gleichungen:



In diesen Gleichungen lassen sich für den als ungebremst (F ax = 0) und als im rollenden Zustand befindlich (a = 0 bzw. EDC = 0) angenommenen Sattelauflieger folgende Änderungen durchführen:

Durch geeignete Umformung lassen sich die folgenden Quotienten ermitteln:
In diesen Gleichungen ist allerdings folgendes zu beachten: - ♢ Der erste Quotient

- ♢ Der zweite Quotient

- ♢ Der dritte Quotient (y a /(x a -x ak )) ist schließlich anhand von Meßgrößen zu errechnen, die dann erfaßt werden, wenn F a < 0 ist.
- Aufgrund der oben bestimmten Quotienten sind schließlich alle Größen bekannt und es kann der Wert von F ky wie folgt angegeben werden:

Mit

Die oben eingeführten Terme N1 und K1 vereinfachen die weiterhin erfoderliche Gleichung für F kx wie folgt:
Das gesuchte Verhältnis F kx/ F ky kann nunmehr ohne die Aufnahme der unsicheren Größe F a berechnet werden. - Für den Fall, daß die Vorder- und/oder Hinterachse aus zwei oder mehr Einzelachsen gebildet ist, werden die genannten Kräfte F₁ bzw. F₂ dadurch bestimmt, daß die Summe der erfaßten Kräfte jeder Einzelachse gebildet wird; als horizontale Koordinate der betreffenden Doppel- oder Mehrfachachse (d.h. x₁ bzw. x₂) wird jeweils der Mittelwert aus den Koordinaten aller Einzelachsen gebildet.
Claims (11)
- Verfahren zum Ermitteln der beim Bremsvorgang von einem Anhänger auf ein Zugfahrzeug ausgeübten Auflaufkraft, bei dem[a] das Kräftegleichgewicht der am Zugfahrzeug in vertikaler Richtung wirkenden Kräfte bestimmt wird,[b] das Kräftegleichgewicht der am Zugfahrzeug in horizontaler Richtung wirkenden Kräfte bestimmt wird,[c] und bei dem aus dem vertikalen und horizontalen Kräftegleichgewicht die Auflaufkraft F k ermittelt wird.
- Verfahren nach Anspruch 1, bei dem das Zugfahrzeug ein Lastkraftwagen mit Anhängerkupplung ist und die Auflaufkraft F k des Anhängers ausschließlich in horizontaler Richtung wirkt, dadurch gekennzeichnet, daß die Auflaufkraft F k des Anhängers mittels folgender Gleichung ermittelt wird:

- Verfahren nach Anspruch 2, dadurch gekennzeichnet, daß das auf den Schwerpunkt S des Lastkraftwagens bezogene Momentengleichgewicht bestimmt wird, wobei die Auflaufkraft F k mittels folgender Gleichung ermittelt wird:

- Verfahren nach Anspruch 3, dadurch gekennzeichnet, daß zur Ermittlung der jeweiligen relativen horizontalen Lage x₁, x₂ der Achsen des Lastkraftwagens zu seinem Schwerpunkt S durch Bestimmung des Momentengleichgewichts zu dem Zeitpunkt ermittelt wird, zu dem der Lastkraftwagen im beschleunigungslosen Zustand rollt.
- Verfahren nach Anspruch 3 oder 4, dadurch gekennzeichnet, daß die relative vertikale Lage y₁₂ der Achsen des Lastkraftwagens mittels folgender Gleichung ermittelt wird:

- Verfahren nach Anspruch 5, dadurch gekennzeichnet, daß die genannte Gleichung mehrfach berechnet und anschließend der Mittelwert hieraus ermittelt wird.
- Verfahren nach Anspruch 1, bei dem das Zugfahrzeug eine Sattelzugmaschine mit Sattelkupplung ist und die Auflaufkraft F k des Aufliegers sowohl in horizontaler als auch in vertikaler Richtung wirkt, dadurch gekennzeichnet, daß zur Regelung der Bremskraft des Aufliegers das Verhältnis F kx/ F ky der horizontalen Komponente F kx zur vertikalen Komponente F ky der Auflaufkraft mit dem Verhältnis a/g der Fahrzeugbeschleunigung a zur Erdbeschleunigung g verglichen wird.
- Verfahren nach Anspruch 7, dadurch gekennzeichnet, daß das Verhältnis F kx/ F ky der horizontalen Komponente F kx zur vertikalen Komponente F ky der Auflaufkraft mittels folgender Gleichung ermittelt wird:

- Verfahren nach Anspruch 7, dadurch gekennzeichnet, daß bei einer Sattelzugmaschine, bei der die Vorderachslast F₁ nicht erfaßbar ist, zur Ermittlung des Verhältnisses F kx/ F ky der horizontalen zur vertikalen Komponente der Auflaufkraft zusätzlich das Momentengleichgewicht herangezogen wird.
- Verfahren nach Anspruch 9, dadurch gekennzeichnet, daß das Verhältnis der horizontalen Komponente F kx zur vertikalen Komponente F ky der Auflaufkraft F k mittels folgender Gleichung ermittelt wird:

- Verfahren nach Anspruch 9, dadurch gekennzeichnet, daß das Verhältnis der horizontalen Komponente F kx zur vertikalen Komponente F ky der Auflaufkraft F k mittels folgender Gleichungen ermittelt wird:


Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE4313198A DE4313198C3 (de) | 1993-04-22 | 1993-04-22 | Verfahren zum Ermitteln der beim Bremsvorgang von einem Anhänger auf ein Zugfahrzeug ausgeübten Auflaufkraft |
| DE4313198 | 1993-04-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0621161A1 true EP0621161A1 (de) | 1994-10-26 |
| EP0621161B1 EP0621161B1 (de) | 1997-07-16 |
Family
ID=6486116
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP94100842A Expired - Lifetime EP0621161B1 (de) | 1993-04-22 | 1994-01-21 | Verfahren zum Ermitteln der Auflaufkraft eines Anhängers |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US5477739A (de) |
| EP (1) | EP0621161B1 (de) |
| JP (1) | JP2851529B2 (de) |
| DE (2) | DE4313198C3 (de) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996008397A1 (de) * | 1994-09-14 | 1996-03-21 | Robert Bosch Gmbh | Verfahren und vorrichtung zur steuerung einer bremsanlage eines fahrzeugs |
| DE19519768A1 (de) * | 1995-05-30 | 1996-12-05 | Knorr Bremse Systeme | Verfahren und Vorrichtung zum Einstellen der Bremskraft eines Anhängers eines aus einem Zugfahrzeug und mindestens einem Anhänger bestehenden Fahrzeugverbundes |
| US6012781A (en) * | 1995-07-14 | 2000-01-11 | Knorr-Bremse Systeme Fur Nutzfahrzeuge Gmbh | Brake control arrangement for composite vehicles |
| AT411347B (de) * | 2001-11-23 | 2003-12-29 | Klaus Martinz | Prüfvorrichtung für auflaufbremsen |
| WO2014006476A2 (en) | 2012-07-03 | 2014-01-09 | Epar Sp. Z O. O. | Shock absorbing trolley of a railway wagon |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69618337T2 (de) * | 1996-02-27 | 2003-02-13 | Knorr-Bremse Systeme Fuer Nutzfahrzeuge Gmbh | Verfahren zur Fahrstabilitätserhöhung |
| DE19706982C2 (de) * | 1996-03-06 | 2002-10-24 | Knorr Bremse Systeme | Bremsanlage zur Steuerung der Bremsung eines Anhängerfahrzeuges |
| DE19809546C1 (de) | 1998-03-05 | 1999-10-07 | Knorr Bremse Systeme | Verfahren und Vorrichtung zur Bestimmung des Radstandes von Fahrzeugen |
| DE19918597C2 (de) * | 1999-04-23 | 2001-03-08 | Deutsch Zentr Luft & Raumfahrt | Verfahren zur Reduktion der Kippgefahr von Straßenfahrzeugen |
| US20030203091A1 (en) * | 2002-04-24 | 2003-10-30 | Hayes-Jacobson Susan M. | Dough product treatment process and products thereof |
| CN101846566B (zh) * | 2010-04-27 | 2011-08-10 | 潍坊威度电子科技有限公司 | 犁耕机械下拉杆纵向力测量装置 |
| CN104374505B (zh) * | 2014-11-12 | 2016-09-07 | 刘鞭箭 | 一种物品跌落及过冲击指示装置和校验工装 |
| GB201722251D0 (en) * | 2017-12-29 | 2018-02-14 | Agco Int Gmbh | Load-dependent trailer brake system and method of controlling such |
| US10994711B2 (en) | 2018-11-29 | 2021-05-04 | Danko Manufacturing LLC | Wireless towed vehicle breakaway detection and alert |
| WO2022111801A1 (en) | 2020-11-25 | 2022-06-02 | Volvo Truck Corporation | A method of controlling a vehicle combination |
| IT202100014741A1 (it) * | 2021-06-07 | 2022-12-07 | Vamag Srl | Sistema multipiastra per la verifica del sistema frenante di veicoli terrestri con almeno due assi |
| DE102023117135A1 (de) * | 2023-06-29 | 2025-01-02 | Zf Cv Systems Global Gmbh | Verfahren zur autarken Steuerung einer Bremsanlage eines Anhängerfahrzeuges eines Sattelzuges |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0288866A2 (de) * | 1987-04-27 | 1988-11-02 | Eaton Corporation | Bremssteuersystem für Sattelzüge |
| EP0374484A1 (de) * | 1988-12-22 | 1990-06-27 | Robert Bosch Gmbh | Verfahren und Einrichtung zum Abstimmen der Bremswirkung |
| DE4136571C1 (de) * | 1991-11-07 | 1993-03-18 | Mercedes-Benz Aktiengesellschaft, 7000 Stuttgart, De | |
| EP0532863A1 (de) * | 1991-09-17 | 1993-03-24 | Mercedes-Benz Ag | Verfahren zur Bremsdruckregelung für ein Anhängefahrzeug, welches mit einem Zugfahrzeug mit elektronisch gesteuerter Druckmittelbremse verbunden ist |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE33697E (en) * | 1987-04-27 | 1991-09-24 | Tractor-trailer brake control system | |
| DE4003316A1 (de) * | 1990-02-05 | 1991-08-08 | Bosch Gmbh Robert | Vorrichtung zur abstimmung der bremswirkung an einem sattelkraftfahrzeug |
| US5330020A (en) * | 1991-06-03 | 1994-07-19 | Ketcham George M | Self-powered towing servomechanism |
| DE4243245A1 (de) * | 1992-12-19 | 1994-06-23 | Wabco Westinghouse Fahrzeug | Verfahren zur Abbremsung eines Fahrzeugzuges |
-
1993
- 1993-04-22 DE DE4313198A patent/DE4313198C3/de not_active Expired - Fee Related
-
1994
- 1994-01-21 EP EP94100842A patent/EP0621161B1/de not_active Expired - Lifetime
- 1994-01-21 DE DE59403346T patent/DE59403346D1/de not_active Expired - Fee Related
- 1994-04-19 US US08/229,770 patent/US5477739A/en not_active Expired - Fee Related
- 1994-04-22 JP JP6084933A patent/JP2851529B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0288866A2 (de) * | 1987-04-27 | 1988-11-02 | Eaton Corporation | Bremssteuersystem für Sattelzüge |
| EP0374484A1 (de) * | 1988-12-22 | 1990-06-27 | Robert Bosch Gmbh | Verfahren und Einrichtung zum Abstimmen der Bremswirkung |
| EP0532863A1 (de) * | 1991-09-17 | 1993-03-24 | Mercedes-Benz Ag | Verfahren zur Bremsdruckregelung für ein Anhängefahrzeug, welches mit einem Zugfahrzeug mit elektronisch gesteuerter Druckmittelbremse verbunden ist |
| DE4136571C1 (de) * | 1991-11-07 | 1993-03-18 | Mercedes-Benz Aktiengesellschaft, 7000 Stuttgart, De |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996008397A1 (de) * | 1994-09-14 | 1996-03-21 | Robert Bosch Gmbh | Verfahren und vorrichtung zur steuerung einer bremsanlage eines fahrzeugs |
| US5702163A (en) * | 1994-09-14 | 1997-12-30 | Robert Bosch Gmbh | Method and apparatus for controlling a brake system of a vehicle |
| DE19519768A1 (de) * | 1995-05-30 | 1996-12-05 | Knorr Bremse Systeme | Verfahren und Vorrichtung zum Einstellen der Bremskraft eines Anhängers eines aus einem Zugfahrzeug und mindestens einem Anhänger bestehenden Fahrzeugverbundes |
| US6012781A (en) * | 1995-07-14 | 2000-01-11 | Knorr-Bremse Systeme Fur Nutzfahrzeuge Gmbh | Brake control arrangement for composite vehicles |
| DE19581733B4 (de) * | 1995-07-14 | 2006-02-16 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Bremssteueranordnung für einen Fahrzeugverbund |
| AT411347B (de) * | 2001-11-23 | 2003-12-29 | Klaus Martinz | Prüfvorrichtung für auflaufbremsen |
| WO2014006476A2 (en) | 2012-07-03 | 2014-01-09 | Epar Sp. Z O. O. | Shock absorbing trolley of a railway wagon |
Also Published As
| Publication number | Publication date |
|---|---|
| DE59403346D1 (de) | 1997-08-21 |
| EP0621161B1 (de) | 1997-07-16 |
| JPH06323931A (ja) | 1994-11-25 |
| DE4313198A1 (de) | 1994-10-27 |
| DE4313198C2 (de) | 1995-12-14 |
| US5477739A (en) | 1995-12-26 |
| JP2851529B2 (ja) | 1999-01-27 |
| DE4313198C3 (de) | 2002-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE4313198C2 (de) | Verfahren zum Ermitteln der beim Bremsvorgang von einem Anhänger auf ein Zugfahrzeug ausgeübten Auflaufkraft | |
| DE10261513B4 (de) | Verfahren zur Zuspannenergieregelung einer Fahrzeugkombination | |
| DE4438222B4 (de) | Verfahren und Vorrichtung zur Steuerung bzw. Regelung der Bremsanlage eines Fahrzeugs | |
| DE69928430T2 (de) | Fahrzeugaufhängungen | |
| EP0697314B1 (de) | Verfahren zur lastabhängigen Bremsdruckregelung einer Fahrzeugkombination aus Zug- und Anhängefahrzeug | |
| EP1107894B1 (de) | Verfahren und vorrichtung zur erkennung einer pendelbewegung eines fahrzeugs | |
| DE69606883T2 (de) | Elektronische bremsanlage für strassenfahrzeuge mit anhänger | |
| DE69812035T2 (de) | Vorrichtung für ein fahrzeug | |
| DE4136571C1 (de) | ||
| EP3353024B1 (de) | Verfahren zum schätzen einer achslastverteilung bei einem lastzug | |
| DE102012024981A1 (de) | Verfahren zur Bremsregelung einer Fahrzeugkombination und Brems-Steuereinrichtung für ein Zugfahrzeug | |
| EP1298020B1 (de) | Verfahren zur Ermittlung der Masse eines Kraftfahrzeugs unter Berücksichtigung unterschiedlicher Fahrsituationen | |
| DE102012004290A1 (de) | Antriebsachsen-Achslastbeeinflussung bei Fahrzeugzügen | |
| DE10146031A1 (de) | Verfahren zur Bestimmung des Reifenluftdrucks und der Radlast von Fahrzeugreifen | |
| DE4010073A1 (de) | Einrichtung zur bergfahrt-erkennung | |
| DE102019111187A1 (de) | Verfahren zur Ermittlung einer Achslast an einem mechanisch gefederten Fahrzeug | |
| DE19519768C2 (de) | Verfahren und Vorrichtung zum Einstellen der Bremskraft eines Anhängers eines aus einem Zugfahrzeug und mindestens einem Anhänger bestehenden Fahrzeugverbundes | |
| EP0374484A1 (de) | Verfahren und Einrichtung zum Abstimmen der Bremswirkung | |
| DE10065759A1 (de) | Vorrichtung und Verfahren zur Überwachung eines Drucksensors | |
| DE3428192C2 (de) | Wagenzug-Bremseinrichtung | |
| WO2012059147A1 (de) | Steuermodul für ein fahrzeugsystem, das fahrzeugsystem sowie ein fahrzeug mit diesem fahrzeugsystem | |
| EP1800982A1 (de) | Verfahren zur Ermittlung der Güte der Abstimmung der Bremsanlagen eines Zugfahrzeugs und eines Anhängefahrzeugs | |
| EP1289810B1 (de) | Verfahren und vorrichtung zur bestimmung des ansprechdrucks von fahrzeugbremsen | |
| DE19858583A1 (de) | Verfahren und Vorrichtung zur Steuerung einer Bremsanlage eines Fahrzeugs | |
| EP2390121A1 (de) | Nutzfahrzeuganhänger und Steuereinrichtung für Luftfederanordnung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19940829 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE ES FR GB IT NL SE |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: KNORR-BREMSE SYSTEME FUER NUTZFAHRZEUGE GMBH |
|
| 17Q | First examination report despatched |
Effective date: 19950523 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE ES FR GB IT NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Effective date: 19970716 Ref country code: FR Effective date: 19970716 Ref country code: ES Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19970716 |
|
| REF | Corresponds to: |
Ref document number: 59403346 Country of ref document: DE Date of ref document: 19970821 |
|
| EN | Fr: translation not filed | ||
| GBV | Gb: ep patent (uk) treated as always having been void in accordance with gb section 77(7)/1977 [no translation filed] |
Effective date: 19970716 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19980121 Year of fee payment: 5 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990801 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050121 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20090115 Year of fee payment: 16 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100803 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20130122 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |