EP0689636B1 - Zweischaufelgreifer zum herstellen zylindrischer bohrungen - Google Patents
Zweischaufelgreifer zum herstellen zylindrischer bohrungen Download PDFInfo
- Publication number
- EP0689636B1 EP0689636B1 EP94911826A EP94911826A EP0689636B1 EP 0689636 B1 EP0689636 B1 EP 0689636B1 EP 94911826 A EP94911826 A EP 94911826A EP 94911826 A EP94911826 A EP 94911826A EP 0689636 B1 EP0689636 B1 EP 0689636B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- frame
- grab
- supporting
- rope
- base plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Revoked
Links
- 238000005553 drilling Methods 0.000 title claims description 6
- 230000000694 effects Effects 0.000 claims description 8
- 238000006073 displacement reaction Methods 0.000 claims 1
- 239000002689 soil Substances 0.000 description 9
- 238000000034 method Methods 0.000 description 4
- 230000035515 penetration Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000003673 groundwater Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
Images

Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B11/00—Other drilling tools
- E21B11/04—Boring grabs
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/46—Dredgers; Soil-shifting machines mechanically-driven with reciprocating digging or scraping elements moved by cables or hoisting ropes ; Drives or control devices therefor
- E02F3/47—Dredgers; Soil-shifting machines mechanically-driven with reciprocating digging or scraping elements moved by cables or hoisting ropes ; Drives or control devices therefor with grab buckets
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B11/00—Other drilling tools
Definitions
- the invention relates to a two-bucket gripper for making cylindrical bores in the ground, for example for creating piles as foundation elements for removing high loads, or arranged one behind the other as so-called dissolved or overlapping pile walls, or for sinking well bores and the like. Like uses.
- DT-OS 20 09 597 Known two-bucket grabs (DT-OS 20 09 597) are equipped with falling and stabbing gripping tools.
- the blades which are designed as spades, penetrate the soil when falling and take hold of the loosened soil when the blades are closed. (Gripping effect)
- the conveying capacity depends on an optimal gripping effect and this is among other things influenced by the nature of the soil, whether it is very shear-resistant, cohesive, or sandy or coarse-gravel soils.
- high groundwater level d. H. when used underwater may do not close the blades by jamming stones between the spade blades, and the filling can be completely or at least partially rinsed out via the gap.
- the design and position of the bucket pivot bearings also play a role in the gripping effect because this determines the course of the closing curve of the spade blade, which can be tweezer-like or more like a bucket.
- digging grippers with external bucket swivel bearings and simple scissor linkage translation can still work efficiently in cohesive soils up to approx. 1.3 m in diameter.
- the lifting movement of the gripper and the closing movement of the blades are based on separate drive types. Therefore, the lifting rope of the excavator can be reeved via a loose roller to reduce the cable pulling force, and thus a smaller, less powerful excavator of conventional size can be selected. In order to achieve good filling levels, however, the grippers must be particularly heavy because the dynamic penetration effect is less due to the hydraulic hose tracking.
- 10 49 456 was developed according to GB-PS and DE 23 34 591 C2 proposed to clamp radially movable, circumferentially distributed pressure plates to the borehole wall in order to dissipate the vertical forces from the hydraulic locking cylinder.
- These devices require sensitive drive and control mechanisms, which are very susceptible to failure when used in the ground and sometimes in dirty water. This has already had the consequence that the gripper can no longer release itself from its tension and must be regarded as lost.
- the complex object of the invention is derived to create a unitary device that can be universally adapted to the very different operating conditions mentioned and can be combined with the most varied and considerably lighter types of excavator and, above all, with the very different soil conditions described can be used with good filling levels.
- the gripper according to the invention with these features is designed as a hydraulic gripper, and is therefore particularly suitable for those applications such as those mentioned at the outset for this type of gripper.
- the hydraulic gripper can only be set or dropped from a low height.
- the vertically directed blade spades can be pushed into the ground under very high contact pressure. This requires a large - and still expandable - dead weight of the gripper body with the gripper blades and is made even more effective by repeated repositioning in connection with an oscillating, rocking, hydraulically controlled closing movement of the blades.
- This gripper with the mentioned features solves the problem of the invention, namely to create a two-bucket gripper that can be adapted to the respective operating conditions, in that it builds on its basic design with the features of A. and B. from a hydraulic gripper to a two-rope gripper is easily convertible and thereby realizes the core idea of the invention
- the gripper according to the invention has the great advantage that it can be converted from a hydraulic gripper to a cable gripper - or vice versa - from a cable gripper to a hydraulic gripper by only a few replacement measures.
- Other essential features of the Execution as a hydraulic gripper can be seen in the fact that a cable pulley or a cable duct with a cable deflection roller is arranged on the crosshead for connection to the excavator and also that a drive cylinder acting on the drive carriage is connected to the crosshead or that one is connected to the drive carriage connected to a closing cable arranged pulley set is connected by a rope reeving with a pulley block, which is connected to the frame base plate with detachable elements.
- the interchangeable frame crosshead can be provided according to the invention in two forms of training, which are particularly advantageous for working as a rope gripper or as a hydraulic gripper, specifically for hydraulic operation with a loose rope reel for reeving the excavator rope and with connecting means for the drive cylinder and for rope operation a rope deflection roller and with a rope lead-through for the closing and hoisting rope.
- the frame base plate can also be detachably connected to the frame handles. This is advantageous if the blade bearings are attached directly to the frame base plate.
- the blade bearings can also be connected to a blade bearing block that is detachably connected to the frame base plate.
- a special additional weight can be connected to the frame base plate according to a further proposal.
- Two supporting skids are preferably provided opposite one another; for larger borehole diameters, for example, four support runners can also be useful. If the borehole to be produced remains uncased, the support runners of the gripper can be adjusted in such a way that they guide the gripper along the borehole wall with a small gap.
- each of the support runners is assigned to the support slide mounted in support brackets on which support springs, which are connected by spring force and which are articulated to the inside of the support runners, are attached.
- the support runners can be pressed against the pipe wall by the movement of the support rollers with the drive slide, which bear against the support rails.
- the support rails are articulated with their lower end in the lower region of the support runners and resiliently held in their upper region against the associated support runners against spring pressure and with a concave , the support roller adapted recess.
- the support rails with their concave recesses hold the support rollers with the drive carriage in the open bucket position despite the slack rope when the open gripper falls from the top position, for example from a height of 5 m, with the two ropes being drummed freely.
- the support rollers When hitting the bottom of the borehole or before the start When the blades are closed, the support rollers press out of the concave recess of the support rails and exert an outward pressure on the latter - against a spring force - which is transmitted as a pressing force to the support runners and briefly during the penetration of the blade spades blocking the soil against the pipe wall, so that the gripper can only be pushed upwards by friction.
- This pressure force takes effect automatically as soon as the drive carriage begins its downward movement from its starting position, initiated by the powerful impact of the gripper on the sole, or by actuating the closing rope.
- the blades can remain in their open position during this first movement phase of the drive carriage if, according to a further feature of the invention, the pull-push linkage is connected to the drive carriage and the blade spades via an axially movable bearing. This allows the drive sled to travel a short distance, overcome the blockage, press the support runners against the drill pipe without exerting pressure on the linkage. Only then, as a result of the further non-positive movement of the drive slide downward, is the blade closing movement initiated under the influence of the tension.
- the bracing effect can be controlled via the vertical, non-positive movement of the support rollers connected to the drive carriage.
- the gripper frame "GR" represents the framework of the gripper; part of this frame can be seen as frame 1 in Fig. 2, 4, 5.
- the blade bearing block 26 is fastened to the frame base plate 2 with the blade pivot bearings 31 of the blades 5, as can be seen from FIG. 3.
- a centering mandrel 20 inserted into a corresponding bore in the frame base plate 2 serves for exact fixation, which is secured by connecting pull bolts 21.
- the bearing holes on the blades 5 for the tension and compression linkage 15 are designated; their position is coordinated with the blade pivot bearings 31 such that in the open state the blade spades with teeth 43 are directed vertically downward.
- the frame crosshead 4 can be removed by loosening the bolt connection (not shown) - see bores 23 - and against another crosshead, preferably the frame crosshead 6 for the cable bushing 46 - see FIG. 7 to 12 - can be replaced.
- the drive cylinder 13 is anchored in a bore by means of an anchor bolt 25 and connected to the drive carriage 12 by means of a bearing bolt 24, to which the pull-push rod 15 is connected to the bearing points 28.
- the drive carriage is longitudinally guided on the frame posts 3.
- a bladder pressure accumulator 44 is provided for the drive cylinder 13, which ensures that the blades remain closed under pressure during the conveying path.
- a cable pulley 18 and the connections 16 for the hydraulic hose connections are also connected to the frame crosshead 4 as a connecting means between the gripper frame GR and the excavator via a swivel with a pressure bearing 17.
- FIG. 5 illustrates in a sectional view the frame stems 3 with the frame base plate 2.
- the additional weight 14 shown in FIG. 6 is detachably connected by means of a bolt connection 19 to a bearing plate 22 which is attached between two frame posts 3.
- the functionally essential elements are easily detachably and interchangeably connected to the frame, so that a modular system is created.
- This design of the gripper means that it can be quickly switched from hydraulic to cable operation. In many cases, this option saves having a rope and hydraulic grab available, because depending on the local ground conditions and drilling ⁇ , one or the other grab type is more suitable for use.
- 7 to 12 relate to rope designs of the gripper according to the invention, as are preferably designed for use in uncased and cased boreholes are.
- the drive slide 12 for the blade actuation is moved by means of the pull and push linkage 15 through a pulley arrangement.
- Their embodiment is shown in FIG. 9.
- This pulley system consists of the deflection roller set 7 in the drive carriage 12 and the rope pulley deflection block 8 with the bearing plate 22 and the closing and pulling rope 9 and 10, through which - in the exemplary embodiment tulip-like - rope leadthrough 46 are guided.
- the support skids 11 are not movably attached to the frame stems 3 for use in the uncased borehole. They are provided with support rails "A" 34 which are mounted at 35 in the support runners 11 and are resiliently pressed against the support rollers 29 of the drive carriage 12 by means of the compression springs 36 arranged in adjustable abutments 37. In the position of the drive carriage 12 shown in FIG. 7, its support rollers 29 are engaged in the recesses 47 of the support rails 34, and this positive engagement engages the drive carriage 12 with the pull and push linkage 15 during the fall of the gripper onto the bottom of the borehole in it Fixed position so that the opening position of the blades is reliably maintained even when slack rope is formed.
- the support rollers 29 press the support rail "A" outwards with a short downward movement and roll over the depressions 47 with a further downward movement of the drive carriage 12, so that they rest on the tread sections 48 and 49 run along.
- FIGS. 10 to 12 show the design and mode of operation of the gripper according to the invention in the rope or hydraulic version in the cased borehole.
- the support rollers 29 of the drive carriage 12 engages in the recesses 47 of the support rails "B" 40 and as a result the drive carriage 12 is fixed in its upper starting position and the blades 5 remain open despite any slack rope formation.
- the support rollers 29 disengage from the recesses 47 and press the support runners in the adjoining tread section 50 of the support rails 40 in the direction of the drill pipe 45, so that a short contact pressure thereby is exercised, which clamps the gripper in its contact position via frictional engagement, so that when the shovel spade is pressed into the soil, the gripper experiences a greater counterforce.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Geology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- Environmental & Geological Engineering (AREA)
- Fluid Mechanics (AREA)
- Physics & Mathematics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Earth Drilling (AREA)
- Load-Engaging Elements For Cranes (AREA)
Abstract
Description
- Die Erfindung betrifft einen Zweischaufelgreifer zum Herstellen zylindrischer Bohrungen im Erdreich, beispielsweise zum Erstellen von Pfählen als Gründungselemente zum Abtragen hoher Lasten, oder hintereinander angeordnet als sogenannte aufgelöste oder überschnittene Pfahlwände, oder zum Abteufen von Brunnenbohrungen u. dgl. Verwendungen.
- Bekannte Zweischaufelgreifer (DT-OS 20 09 597) sind mit fallenden und stechenden Greifwerkzeugen ausgerüstet. Dabei dringen die als Stechspaten ausgebildeten Schaufeln beim Herabfallen in das Erdreich ein und ergreifen beim Schliessen der Schaufeln des gelöste Erdreich. (Greifeffekt)
- Die Förderleistung hängt von einem optimalen Greifeffekt ab und diese ist u.a. von der Bodenbeschaffenheit beeinflusst, und zwar, ob es sich um sehr scherfeste, bindige, oder aber um sandige oder grob kiesige Böden handelt. Bei hohem Grundwasserstand d. h. beim Einsatz unter Wasser können u.U. durch Einklemmen von Steinen zwischen den Spatenblättern die Schaufeln nicht schliessen, und über den Spalt kann die Füllung vollständig oder zumindest teilweise wieder ausgespült werden. Auch spielt für den Greifeffekt die Ausbildung und Lage der Schaufel-Schwenklager eine Rolle, weil dadurch der Verlauf der Schliesskurve des Spatenblattes bestimmt wird, die pinzettenartig oder mehr schaufelartig sein kann. Erfahrungsgemäss kann mit Stechgreifern mit aussenliegenden Schaufel-Schwenklagern und einfacher Scherengestänge-Übersetzung in bindigen Böden noch bis ca. 1,3 m Durchmesser leistungsstark gearbeitet werden kann.
- Der Optimierung der Bemessungsgrössen für diese Faktoren sind bei den bisher bekannten Greifern bauartbestimmte Grenzen gesetzt; die Auftreffenergie und damit die Eindringtiefe sind ferner stark von der Bodenbeschaffenheit abhängig. Wie erwähnt, wird die Eindringtiefe in den Grund stark behindert, wenn das Bohrloch unter Wasser oder einer anderen stützenden Flüssigkeit steht.
- Bei Seilgreifern mit Hub- und Schliesseil kann der Stech-und Schliessvorgang mehrfach aufeinanderfolgend wiederholt werden, um die Füllung zu verbessern. Dies ist bei Einseilgreifern nicht möglich; diese schliessen nach dem Auftreffen auf die Sohle ohne Nachfassmöglichkeit.
- Für grosse Bohrdurchmesser, z.B. 2,0 bis 3,0 m, sind ausserdem sehr hohe Schaufelschliessmomente erforderlich, um den Bohrkern abzutrennen und zu zerspanen. Pinzettenartige Schliessbewegungen etwa von Stechspaten sind in diesen Fällen ungeeignet.
- Hohe Schaufelschliessmomente lassen sich bei Seilgreifern nur über große Greifergewichte realisieren. Diese haben grosse Zugkräfte an der Trommel des Baggers und damit sehr hohe Baggerleistungen und -Gewichte zur Folge. Derartig schwere Bagger sind nur in geringer Zahl verfügbar und ausserdem sehr betriebs- und kostenaufwendig.
- Bei Hydraulik-Greifern gehen die Hubbewegung des Greifers und die Schliessbewegung der Schaufeln von getrennten Antriebsarten aus. Daher kann das Hubseil des Baggers zur Reduzierung der Seilzugkraft über eine lose Rolle eingeschert, und es kann somit ein kleinerer, leistungsschwächeren Bagger von herkömmlicher Größe gewählt werden. Um gute Füllungsgrade zu erzielen müssen jedoch die Greifer besonders schwer sein, weil der dynamische Einstecheffekt wegen der Hydraulikschlauch-Nachführung geringer ist.
- Um bei reinen Hydraulik-Greifern den Füllungsgrad der Schaufeln zu verbessern, wurde nach der GB-PS 10 49 456 und der DE 23 34 591 C2 vorgeschlagen, radialbewegliche umgangsverteilte Druckplatten an die Bohrlochwand zu verspannen, um die Vertikalkräfte aus dem Hydraulik-Schliesszylinder abzutragen. Diese Vorrichtungen erfordern empfindliche Antriebs- und Steuermechanismen, die beim Einsatz im Erdreich und teilweise im Schmutzwasser sehr störanfällig sind. Das hat schon zur Folge gehabt, dass sich der Greifer aus seiner Verspannung nicht mehr lösen kann und als verloren betrachtet werden muss.
- Aus diesen stark abweichenden Gegebenheiten leitet sich die komplexe Aufgabe der Erfindung dahingehend ab, ein einheitliches Gerät zu schaffen, das an die erwähnten sehr unterschiedlichen Einsatzbedingungen universell anpassbar und mit den verschiedensten und erheblich leichteren Baggerbauarten kombinierbar und vor allem auch bei den geschilderten sehr voneinander abweichenden Bodenbeschaffenheiten mit guten Füllungsgraden einsetzbar ist.
- Ausgehend von dem Grundprinzip des Schlitzwandgreifers nach der EP-A-0 412 477 löst die Erfindung die genannte Aufgabe durch Schaffung eines Zweischaufelgreifers zum Herstellen zylindrischer Bohrungen im Erdreich, dessen am unteren Ende des Greiferrahmen an den Schaufel-Schwenklagern angelenkten Greiferschaufeln mittels Zug-Druckgestänges öffen- und schliessbar sind, mit
- A.
- einen aus einer Rahmen-Grundplatte vier Rahmenstielen und einem Rahmen-Querhaupt gebildeten biegesteifen Greiferrahmen,
- B.
- an der mit den Rahmenstielen lösbar verbundenen Rahmen-Grundplatte lösbar angebrachten Schaufel-Lagerbock mit Schaufel-Schwenklagern, und mit
- C.
- an dem mit den Rahmenstielen lösbar verbundenden Rahmen-Querhaupt angeordneten Verbindungsmittel zwischen Greiferrahmen und Bagger,
- D.
- an den Rahmenstielen an wenigstens zwei einander gegenüberliegenden Seiten gelenkig angeschlossenen schalenförmigen Stützkufen mit einem dem Bohrungsradius etwa entsprechenden Aussenprofil,
- E.
- einem an den Rahmenstielen gleitgeführten Antriebsschlitten, an dem das Zug-Druckgestänge für die Bewegung der Greiferschaufeln angelenkt ist, und
- F.
- einem am Antriebsschlitten angreifenden Antriebszylinder, der am lösbaren Rahmen-Querhaupt angeschlossen ist.
- Der erfindungsgemässe Greifer mit diesen Merkmalen ist als Hydraulikgreifer ausgestaltet, und er ist daher für solche Einsatzfälle besonders geeignet, wie sie eingangs für diese Greiferbauart erwähnt sind. Der Hydraulikgreifer kann nur gesetzt oder aus geringer Höhe fallengelassen werden. Zur Erzielung eines grossen Füllungsgrades können die senkrechtgerichteten Schaufelspaten unter sehr hohem Anpressdruck in das Erdreich geschoben werden, dazu ist ein grosses - und noch vergrösserbares - Eigengewicht des Greiferkörpers mit den Greiferschaufeln erforderlich und wird noch effektiver durch mehrfaches Nachsetzen in Verbindung mit einer oszillierend-wippenden, hydraulisch gesteuerten Schliessbewegung der Schaufeln.
- Durch diesen Greifer mit den genannten Merkmalen wird die Aufgabe der Erfindung, nämlich einen an die jeweiligen Ein) satzbedingungen anpassbaren Zweischaufelgreifer zu schaffen, dadurch gelöst, dass er aufbauend auf seiner Grundbauart mit den Merkmalen zu A. und B. von einem Hydraulikgreifer zu einem Zweiseilgreifer in einfacher Weise umrüstbar ist und dadurch den Kerngedanken der Erfindung verwirklicht
- Durch diese Umrüstung wird ein Zweiseil-Zweischaufelgreifer zum Herstellen zylindrischer Bohrungen im Erdreich geschaffen, dessen am unteren Ende des Greiferrahmens an den Schaufel-Schwenklagern angelenkte Greiferschaufeln mittels eines Druck- und Zuggestänges öffen- und schliessbar sind, mit
- A.
- einem aus einer Rahmen-Grundplatte, vier Rahmenstielen und einem lösbaren Rahmen-Querhaupt gebildeten biegesteifen Greiferrahmen, und
- B.
- an der mit den Rahmenstielen verbundenen Rahmen-Grundplatte lösbar angebrachtem Schaufel-Lagerbock mit Schaufel-Schwenklagern
- C.
- an dem mit den Rahmenstielen lösbar verbundenen Rahmen-Querhaupt angeordneter Seileinführung für das Schliesseil und das Hubseil,
- D.
- an den Rahmenstielen an wenigstens zwei einander gegenüberliegenden Seiten gelenkig angeschlossene schalenförmige Stützkufen mit einem dem Bohrlochradius etwa entsprechenden Aussenprofil,
- E.
- einem an den Rahmenstielen gleitgeführten Antriebsschlitten angeordneten Umlenkrollensatz , welcher mittels einer Seileinscherung mit einem Seilrollenblock in Verbindung steht, der an der Rahmen-Grundplatte lösbar angeschlossen ist, und
- F.
- einer am Rahmen-Querhaupt mit der Seileinführung angeordnete Seil-Umlenkwalze für die Seil-Einscherung.
- Der erfindungsgemässe Greifer hat wegen seiner Grundbauart den grossen Vorteil, dass er durch nur wenige Austauschmassnahmen von einem Hydraulik-Greifer in einen Seilgreifer - oder umgekehrt von einem Seilgreifer in einen Hydraulik-greifer - umrüstbar ist. Weitere wesentliche Merkmale der Ausführung als Hydraulikgreifer sind darin zu sehen, dass am Querhaupt zur Verbindung mit dem Bagger eine Seilrolle oder eine Seildurchführung mit Seil-Umlenkwalze angeordnet ist und ferner dass ein am Antriebsschlitten angreifender Antriebszylinder am Querhaupt angeschlossen ist bzw. dass ein an dem mit einem Schliesseil verbundenden Antriebsschlitten angeordneter Umlenkrollensatz mittels einer Seil-einscherung mit einem Seilrollenblock in Verbindung steht, der an der Rahmen-Grundplatte mit lösbaren Elementen angeschlossen ist.
- Durch Austausch des Antriebszylinders gegen einen Umlenkrollensatz über dem Antriebsschlitten sowie des Seilrollenblocks, verbunden mit der Rahmen-Grundplatte und entsprechende Einscherung des Schliesseils zum Baggerseil hin, ist die Umrüstung der funktionswesentlichen Elemente durchgeführt.
- Das austauschbare Rahmen-Querhaupt kann erfindungsgemäss in zwei Ausbildungsweisen bereitgestellt werden, welche für die Arbeitsweise als Seilgreifer oder als Hydraulikgreifer besonders vorteilhaft sind, und zwar für den Hydraulikbetrieb mit einer losen Seilrolle zur Einscherung des Baggerseils sowie mit Verbindungsmitteln für den Antriebszylinder und für den Seilbetrieb mit einer Seil-Umlenkwalze und mit einer Seildurchführung für das Schliess- und Hubseil.
- Nach einem weiteren Merkmal kann auch die Rahmengrundplatte lösbar mit den Rahmenstielen verbunden sein. Dies ist dann vorteilhaft, wenn die Schaufellager unmittelbar an der Rahmengrundplatte angebracht sind. In abgewandelter Ausbildungsweise können die Schaufellager auch an einem mit der Rahmen-Grundplatte lösbar verbundenen Schaufellagerbock verbunden sein.
- Um das Gewicht des Geräts zu steigern, kann nach einem weiteren Vorschlag auf die Rahmen-Grundplatte ein besonderes Zusatzgewicht anschliessbar sein.
- Weitere wesentliche Merkmale beziehen sich auf die Anordnung der Stützkufen und deren Bewegungsfunktionen. Vorzugsweise sind einander gegenüberliegend zwei Stützkufen vorgesehen; bei grösseren Bohrlochdurchmessern können beispielsweise auch vier Stützkufen zweckmässig sein. Wenn das herzustellende Bohrloch unverrohrt bleibt, sind die Stützkufen des Greifers derart einstellbar, dass sie an der Bohrlochwandung unter geringem Zwischenraum entlanggleitend dem Greifer eine Führung geben.
- Bei der Arbeitsweise mit Verrohrung des Bohrloches können erfindungsgemäss die Stützkufen zum kurzzeitigen Verspannen des Greifers in Querrichtung gegenüber dem Bohrrohr eingesetzt werden. Hierzu ist vorgesehen, dass jeder der Stützkufen zugeordnet und zugerichtet am Antriebsschlitten in Halterungen gelagerte Stütz-Laufrollen angebracht sind, an welchen unter Federkraftwirkung stehende Stützlaufschienen anliegen, die gelenkig an den Innenseiten der Stützkufen angeschlossen sind. Durch die Bewegung der Stütz-Laufrollen mit dem Antriebsschlitten, welche an den Stützlaufschienen anliegen, können die Stützkufen an die Rohrwandung angepresst werden.
- Bei der Arbeitsweise als Seilgreifer wird eine bedeutsame funktionelle Verbesserung gegenüber dem Stand der Technik dadurch erreicht, dass die Stützlaufschienen mit ihrem unteren Ende im unteren Bereich der Stützkufen gelenkig gelagert und in ihrem oberen Bereich gegenüber der zugehörigen Stützkufe entgegen einem Federdruck nachgiebig gehalten und mit einer konkaven, der Stützlaufrolle angepassten Vertiefung versehen sind. Die Stützlaufschienen mit ihren konkaven Vertiefungen halten die Stütz-Laufrollen mit dem Antriebsschlitten in geöffneter Schaufelstellung trotz Schlappseil fest, wenn der geöffnete Greifer aus der obersten Position aus beispielsweise 5 m Höhe herunterfällt, wobei die beiden Seile freilaufend abgetrommelt werden. Beim Auftreffen auf die Bohrlochsohle bzw. vor Beginn des Schliessens der Schaufeln drücken sich die Stütz-Laufrollen aus der konkaven Vertiefung der Stützlaufschienen heraus und üben auf letztere einen nach aussen gerichteten Druck - entgegen einer Federkraft - aus, der sich als Anpresskraft auf die Stützkufen überträgt und diese kurzzeitig während des Eindringens der Schaufelspaten in das Erdreich blockierend an die Rohrwandung andrückt, so dass der Greifer nur über Reibschluss nach oben zurückgedrückt werden kann. Diese Andruckkraft wird selbsttätig sofort wirksam, sobald der Antriebsschlitten seine Abwärtsbewegung aus seiner Ausgangsposition beginnt, eingeleitet durch den kräftigen Aufschlag des Greifers aus die Sohle, oder durch Betätigung des Schliessseiles.
- Die Schaufeln können noch während dieser ersten Bewegungsphase des Antriebsschlittens in ihrer geöffneten Stellung verbleiben, wenn nach einem weiteren Erfindungsmerkmal das Zug-Druckgestänge über ein achsial bewegliches Lager mit dem Antriebsschlitten und den Schaufelspaten angeschlossen ist. Dadurch kann der Antriebs- schlitten einen kurzen Weg zurücklegen, die Blockierung dabei überwinden, die Stützkufen gegen das Bohrrohr drücken ohne dabei Druck auf das Gestänge auszuüben. Erst danach, infolge der weiteren kraftschlüssigen Bewegung des Antriebsschlittens nach unten, wird unter Einfluss der Verspannung die Schaufel-Schliessbewegung eingeleitet.
- Durch eine besondere Formgestaltung der Stützlaufschienen kann über den vertikalen, kraftschlüssigen Bewegungsablauf der mit dem Antriebsschlitten verbundenen Stützrollen der Verspannungseffekt gesteuert werden.
- Das kann sich beispielsweise so auswirken, dass zu Anfang der Schaufelschliessbewegung der Reibungswiderstand am grössten ist, aber im weiteren Schliessbewegungsablauf abfällt wenn die Schaufeln in die Schliessphase übergehen.
- Aus dem Kräftebild eines Schaufelgreifers ist zu erkennen, dass zu Anfang eines Schliessvorgangs die senkrecht gerichteten Schneidenkräfte mit zunehmendem Schliessweg bogenförmig in eine fast Horizontale übergehen. Daraus ergibt sich, dass auch zu Anfang die Gegenkraft, gebildet aus dem Eigengewicht und zusätzlich aus der dem Patentmerkmal zugeordneten Aktivierung einer Reibungskraft, am grössten sein muss.
- Es zeigen
- Fig. 1
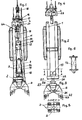
- den erfindungsgemässen Greifer in Hydraulikausführung,
- Fig. 2
- das Rahmengestell des Greifers nach Fig. 1,
- Fig. 3
- den Schaufelsatz des Greifers nach Fig. 1,
- Fig. 4
- das Rahmen-Querhaupt des Greifers nach Fig. 1,
- Fig. 5
- einen Schnitt A-A' durch das Rahmengestell (Fig. 2),
- Fig. 6
- das Zusatzgewicht nach Fig. 1,
- Fig. 7
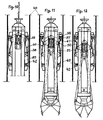
- den erfindungsgemässen Greifer mit Seil-Einscherung im unverrohrten Bohrloch mit geöffneten Schaufeln, und blockiertem Antriebsschlitten,
- Fig. 8
- den Greifer nach Fig. 7 mit geschlossenen Schaufeln, und entblockiertem Antriebsschlitten,
- Fig. 9
- als Einzelheit nach Fig. 7: die Seil-Einscherung mit Antriebsschlitten und Seilrollen-Umlenkblock,
- Fig. 10
- eine Teilansicht des Greifers nach Fig. 7 im verrohrten Bohrloch mit blockiertem Antriebsschlitten,
- Fig. 11
- den Greifer nach Fig. 7 oder Fig. 1 im verrohrten Bohrloch mit entblockiertem Antriebsschlitten, und Verspannung über Stützkufen,
- Fig. 12
- den Greifer nach Fig. 11 in der Schliessphase der Schaufeln, mit gelöster Verspannung zurückgeschwenkten Stützkufen.
- Aus den Fig. 1 bis 6 des dargestellten Ausführungsbeispiels eines Hydraulikgreifers sind wesentliche erfindungsgemässe Merkmale zu entnehmen. Der Greiferrahmen "GR" stellt das Gerüst des Greifers dar; ein Teil dieses Rahmens ist als Rahmengestell 1 in Fig. 2, 4, 5 zu erkennen. Mit 2 ist die Rahmen-Grundplatte, mit 3 die Rahmenstiele und mit 4 das Rahmenquerhaupt bezeichnet, die zusammen den biegesteifen Greiferrahmen "GR" bilden. An der Rahmen-Grundplatte 2 ist der Schaufellagerbock 26 mit den Schaufel-Schwenklagern 31 der Schaufeln 5 befestigt, wie aus Fig. 3 ersichtlich. Am Schaufellagerbock 26 dient ein in eine entsprechende Bohrung der Rahmen-Grundplatte 2 eingesetzter Zentrierdorn 20 der exakten Fixierung, die durch Verbindungs-Zugbolzen 21 gesichert ist. Mit 27 sind die Lagerbohrungen an den Schaufeln 5 für das Zug- und Druckgestänge 15 bezeichnet; deren Lage ist mit den Schaufelschwenklagern 31 derart abgestimmt, dass im geöffneten Zustand die Schaufelspaten mit Zähnen 43 senkrecht nach unten gerichtet sind.
- Wie in Fig. 4 dargestellt ist, kann das Rahmen-Querhaupt 4 durch Lösen der nicht näher dargestellten Bolzenverbindung - siehe Bohrungen 23 - nach oben entnommen und gegen ein anderes Querhaupt, vorzugsweise das Rahmen-Querhaupt 6 für die Seildurchführung 46 - siehe Fig. 7 bis 12 - ausgetauscht werden. In einer Bohrung ist mittels eines Ankerbolzens 25 der Antriebszylinder 13 verankert und mittels eines Lagerbolzens 24 mit dem Antriebsschlitten 12 verbunden, an welchem das Zug-Druckgestänge 15 an den Lagerstellen 28 angeschlossen ist. Der Antriebsschlitten ist an den Rahmenstielen 3 längsgeführt. In Verbindung mit dem hydraulischen Antriebszylinder 13 ist ein Blasen-Druckspeicher 44 vorgesehen, der sicherstellt, dass während des Förderweges die Schaufeln druckbelastet geschlossen bleiben.
- Am Rahmen-Querhaupt 4 sind ausserdem als Verbindungsmittel zwischen Greiferrahmen GR und Bagger über einen Drehwirbel mit Drucklager 17 eine Seilrolle 18 angeschlossen und ferner die Anschlüsse 16 für die Hydraulik-Schlauchverbindungen.
- Fig. 5 veranschaulicht in einer Schnittdarstellung die Rahmenstiele 3 mit der Rahmen-Grundplatte 2.
- Das in Fig. 6 dargestellte Zusatzgewicht 14 ist mittels einer Bolzenverbindung 19 lösbar mit einem Lagerblech 22 verbunden, welches zwischen zwei Rahmenstielen 3 angebracht ist.
- Mit 11 sind zwei einander gegenüberliegende Stützkufen bezeichnet, die an den Rahmenstielen 3 in nicht näher dargestellter Weise befestigt sind; sie können radial verstellbar ausgebildet sein.
- Wie aus Vorstehendem in Verbindung mit den Darstellungen deutlich wird, sind die funktionswesentlichen Elemente in einfacher Weise lös- und austauschbar mit dem Rahmengestell verbunden, so dass ein baukastenartiges System geschaffen wird. Durch diese Ausbildungsweise des Greifers kann dieser rasch von Hydraulikbetrieb auf Seilbetrieb umgestellt werden. Diese Möglichkeit erspart in vielen Fällen die Bereithaltung von je einem Seil- und Hydraulikgreifer, weil in Abhängigkeit von den örtlichen Baugrundverhältnissen und Bohr-φ der eine oder andere Greifertyp einsatzgünstiger ist.
- Die Fig. 7 bis 12 beziehen sich auf Seil-Ausführungen des erfindungsgemässen Greifers, wie sie vorzugsweise für den Einsatz im unverrohrten und im verrohrten Bohrloch ausgebildet sind.
- Wie aus den Fig. 7 und 8 ersichtlich ist, wird der Antriebsschlitten 12 für die Schaufelbetätigung mittels des Zug-und Druckgestänges 15 durch eine Flaschenzuganordnung bewegt. Deren Ausbildungsweise geht aus Fig. 9 hervor. Dieser Flaschenzug besteht aus dem Umlenkrollensatz 7 im Antriebsschlitten 12 und dem mit dem Lagerblech 22 Seilrollen-Umlenkblock 8 und dem Schliess- und dem Zugseil 9 und 10, durch die - im Ausführungsbeispiel tulpenartige - Seildurchführung 46 geleitet sind.
- Bei Ausbildungsweise nach den Fig. 7 und 8 sind die Stützkufen 11 für den Einsatz im unverrohrten Bohrloch nicht beweglich an den Rahmenstielen 3 befestigt. Sie sind mit Stützlaufschienen "A" 34 versehen, die bei 35 in den Stützkufen 11 gelagert und mittels der in verstellbaren Widerlagern 37 angeordneten Druckfedern 36 nachgiebig gegen die Stützaufrollen 29 des Antriebsschlittens 12 angedrückt sind. In der in Fig. 7 gezeigten Stellung des Antriebsschlittens 12 sind dessen Stützlaufrollen 29 in den Vertiefungen 47 der Stützlaufschienen 34 eingerastet, und durch diese formschlüssige Einrastung wird der Antriebsschlitten 12 mit dem Zug- und Druckgestänge 15 während des Herabfallens des Greifers auf den Bohrlochgrund in seiner Lage fixiert, so dass die öffnungsstellung der Schaufeln auch bei Schlaffseilbildung zuverlässig erhalten bleibt. Beim Aufschlag des Greifers auf die Sohle bzw. bei Beginn des Schliessvorganges drücken die Stützlaufrollen 29 bei einer kurzen Abwärtsbewegung die Stützlaufschiene "A" nach aussen und überrollen bei weiterer Abwärtsbewegung des Antriebsschlittens 12 die Vertiefungen 47, so dass sie an den Laufflächen-Abschnitten 48 und 49 entlanglaufen.
- Demgegenüber zeigen die Fig. 10 bis 12 die Ausbildungs- und Arbeitsweise des erfindungsgemässen Greifers in Seil- oder Hydraulikausführung im verrohrten Bohrloch. In der in Fig. 10 gezeigten Stellung sind die Stützlaufrollen 29 des Antriebsschlittens 12 in den Vertiefungen 47 der Stützlaufschienen "B" 40 eingerastet und dadurch ist der Antriebsschlitten 12 in seiner oberen Ausgangsstellung fixiert und die Schaufeln 5 bleiben trotz eventueller Schlaffseilbildung geöffnet. Sobald beim Aufsetzen auf die Bohrsohle die Schliessbewegung des Antriebsschlittens 12 einsetzt, rasten die Stützlaufrollen 29 aus den Vertiefungen 47 aus und drücken in dem anschliessenden Laufflächen-Abschnitt 50 der Stützlaufschienen 40 die Stützkufen in Richtung auf das Bohrrohr 45 an, so dass dadurch kurzzeitig eine Anpresskraft ausgeübt wird, die den Greifer in seiner Aufsetzlage über Reibschluss verspannt, sodass beim Eindrücken der Schaufelspaten in das Erd- reich der Greifer eine grössere Gegenkraft erfährt.
- Auch durch diese Vorkehrungen wird ein verbesserter Füllgrad der Schaufeln erreicht; besonders dann, wenn die zuletzt geschilderten Vorgänge häufiger hintereinander wiederholt werden.
Claims (13)
- Zweischaufelgreifer zum Herstellen zylindrischer Bohrungen im Erdreich, dessen am unteren Ende des Greiferrahmen (GR) an den Schaufel-Schwenklagern angelenkten Greiferschaufeln mittels Druck- und Zuggestänges öffen-; und schliessbar sind, mitA. einem aus einer Rahmen-Grundplatte (2), vier Rahmenstielen (3) und einem Rahmen-Querhaupt (4) gebildeten biegesteifen Greiferrahmen (GR), undB. an der mit den Rahmenstielen (3) verbundenen Rahmen-Grundplatte (2) lösbar angebrachten Schaufel-Lagerbock (26) mit Schaufel-Schwenklagern (31)gekennzeichnet durchC. an dem mit den Rahmenstielen (3) lösbar verbundenden Rahmen-Querhaupt (4) angeordnete Verbindungsmittel (18) zwischen Greiferrahmen (GR) und Bagger,D. an den Rahmenstielen (3) an wenigstens zwei einander gegenüberliegenden Seiten gelenkig angeschlossene schalenförmige Stützkufen (11) mit einem dem Bohrlochradius etwa entsprechenden Aussenprofil,E. einen an den Rahmenstielen (3) gleitgeführten Antriebsschlitten (12), an dem das Zug-Druckgestänge (15) für die Bewegung der Greiferschaufeln (5) angelenkt ist,F. einen am Antriebsschlitten (12) angreifender Antriebszylinder (13), der am lösbaren Rahmen-Querhaupt (4) angeschlossen ist.
- Zweischaufelgreifer zum Herstellen zylindrischer Bohrungen im Erdreich, dessen am unteren Ende des Greiferrahmens (GR) an den Schaufel-Schwenklagern angelenkte Greiferschaufeln mittels eines Druck- und Zuggestänges öffenund schliessbar sind, mitA. einem aus einer Rahmen-Grundplatte (2), vier Rahmenstielen (3) und einem lösbaren Rahmen-Querhaupt (6) gebildeten biegesteifen Greiferrahmen (GR), undB. an der mit den Rahmenstielen (3) verbundenen Rahmen-Grundplatte (2) lösbar angebrachtem Schaufel-Lagerbock (26) mit Schaufel-Schwenklagern (31)gekennzeichnet durchC. an dem mit den Rahmenstielen (3) lösbar verbundenden Rahmen-Querhaupt (6) angeordnete Seileinführung (46) für das Schliesseil (9) und das Hubseil (10)D. an den Rahmenstielen (3) an wenigstens zwei einander gegenüberliegenden Seiten gelenkig angeschlossene schalenförmige Stützkufen (11) mit einem dem Bohrlochradius etwa entsprechenden Aussenprofil,E. einen an dem mit einem Schliesseil (9) verbundenden Antriebsschlitten (12) angeordneten Umlenkrollensatz (7), welcher mittels einer Seileinscherung mit einem Seilrollenblock (8) in Verbindung steht, der an der Rahmen-Grundplatte (2) lösbar angeschlossen ist,F. eine am Rahmen-Querhaupt (6) mit der Seileinführung (46) angeordnete Seil-Umlenkwalze (30) für die Seileinscherung.
- Greifer nach Anspruch 1, dadurch gekennzeichnet, dass am Querhaupt (4) zur Verbindung mit dem Bagger eine Seilrolle (18) mittels Gelenk und Drehlager (17) angeordnet ist.
- Greifer nach Anspruch 1, gekennzeichnet durch ein Rahmen-Querhaupt (4) mit flexiblen Hydr.-Schlauchanschlüssen (16) und Verbindungsmitteln (25) für den Antriebszylinder (13).
- Greifer nach Anspruch 1, dadurch gekennzeichnet, dass an die Rahmen-Grundplatte (2) ein Zusatzgewicht (14) anschliessbar ist.
- Greifer nach Anspruch 2, dadurch gekennzeichnet, dass das Zug-Druckgestänge (15) mit den oberen Stangenenden in eine vertikale Verschiebbarkeit zulassenden Lagerungen (41) am Antriebsschlitten (12) angeschlossen ist.
- Greifer nach Anspruch 1, dadurch gekennzeichnet, dass anstelle der vertikalen Verschiebbarkeit des Lagers (41) eine Verschiebbarkeit innerhalb des Zug-Druckgestänges (15) (Teleskop) möglich ist.
- Greifer nach Anspruch 2, dadurch gekennzeichnet, dass jeder der Stützkufen (11) zugeordnet und zugerichtet am Antriebsschlitten (12) in Halterungen gelagerte Stütz-Laufrollen (29) angebracht sind, an welchen unter Federkraftwirkung mittels Druckfeder (26) stehende Stützlaufschienen (34, 40) anliegen, die mittels Lager (35) gelenkig an den Innenseiten der Stützkufen (11) angeschlossen sind.
- Greifer nach Anspruch 8, dadurch gekennzeichnet, dass die Stützlaufschienen (34, 40) mit ihrem unteren Ende im unteren Bereich der Stützkufen (11) gelenkig gelagert und in ihrem oberen Bereich gegenüber der zugehörigen Stützkufe (11) entgegen einem Federdruck nachgiebig gehalten und mit einer konkaven, der Stützlaufrolle (29) angepassten Vertiefung (47) versehen sind.
- Greifer nach Anspruch 9, dadurch gekennzeichnet, dass die Stützlaufschienen "A" (34) einen an die Vertiefung (47) anschliessenden Laufflächen-Abschnitt (48) für die Stütz-Laufrolle (29) aufweisen, der in Richtung auf die Stützkufe (11) abgewinkelt ist und in einen weiteren Abschnitt (49) übergeht, welcher etwa parallel zum Rahmenstiel verläuft.
- Greifer nach Anspruch 10, dadurch gekennzeichnet, dass die Stützlaufschienen "B" (40) einen an die Vertiefung (47) anschliessenden Laufflächen-Abschnitt (50) für die Stütz-Laufrolle (29) aufweist, der etwa parallel zum Rahmenstiel (3) verläuft, an den sich ein weiterer Laufflächen-Abschnitt (51) anschliesst, der in Richtung auf die Stützkufe (39) abgewinkelt ist.
- Greifer nach Anspruch 9, dadurch gekennzeichnet, dass die Stützkufen (39) über das Drehlager (38) nach aussen horizontal schwenkbar sind.
- Greifer nach Anspruch 8, dadurch gekennzeichnet, dass die Stützkufen (39) nach Beendigung des Spanneffekts durch eine Gegenfeder (42) in die Parallel-Lage zu den Stielen (3) zurückgedrückt werden.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE4309269 | 1993-03-23 | ||
| DE4309269A DE4309269A1 (de) | 1993-03-23 | 1993-03-23 | Zweischaufelgreifer zum Herstellen zylindrischer Bohrungen |
| PCT/DE1994/000307 WO1994021884A1 (de) | 1993-03-23 | 1994-03-19 | Zweischaufelgreifer zum herstellen zylindrischer bohrungen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0689636A1 EP0689636A1 (de) | 1996-01-03 |
| EP0689636B1 true EP0689636B1 (de) | 1997-06-04 |
Family
ID=6483538
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP94911826A Revoked EP0689636B1 (de) | 1993-03-23 | 1994-03-19 | Zweischaufelgreifer zum herstellen zylindrischer bohrungen |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP0689636B1 (de) |
| JP (1) | JP2719611B2 (de) |
| KR (1) | KR0177262B1 (de) |
| CN (1) | CN1046987C (de) |
| DE (2) | DE4309269A1 (de) |
| WO (1) | WO1994021884A1 (de) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2765257B1 (fr) * | 1997-06-25 | 1999-09-03 | Bachy | Benne d'excavation a cables perfectionnee |
| ES2160081B1 (es) * | 1999-12-16 | 2002-06-01 | Codina Juan Vicente Herrero | Cuchara para maquinas excavadoras de muros pantallas y pilotes rectangulares, y maquina dotada de dicha cuchara. |
| CN101440624B (zh) * | 2007-11-22 | 2011-01-19 | 北京市三一重机有限公司 | 自动调节的导向装置 |
| CN101440626B (zh) * | 2007-11-22 | 2010-12-22 | 北京市三一重机有限公司 | 摆动式纠偏装置 |
| CN103205990B (zh) * | 2013-04-18 | 2015-11-11 | 大连大金马基础建设有限公司 | 动力冲击液压抓取式取土装置 |
| CN103485381A (zh) * | 2013-09-09 | 2014-01-01 | 浙江鼎业基础工程有限公司 | 冲抓机 |
| JP6087794B2 (ja) * | 2013-11-20 | 2017-03-01 | 山本基礎工業株式会社 | ハンマーグラブ |
| CN107989095A (zh) * | 2017-12-15 | 2018-05-04 | 中科纳达新材料(广西)有限公司 | 一种用于建筑地基的刨坑装置 |
| CN111749620B (zh) * | 2020-07-20 | 2025-02-21 | 深圳市金世纪工程实业有限公司 | 灌注桩旋挖钻筒渣土铲卸装置 |
| CN114084663B (zh) * | 2021-11-12 | 2024-04-02 | 洛阳万基金属钠有限公司 | 一种金属钠棒抓取机构 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT1070375B (it) * | 1976-12-30 | 1985-03-29 | Casagrande & C Spa | Perfezionamenti alle benne con valve fulcrate,in posizione interna e benne cosi' perfezionate |
| DE3615068C1 (en) * | 1986-05-03 | 1987-10-08 | Dyckerhoff & Widmann Ag | Rope-guided trench-wall grab |
| CN1012220B (zh) * | 1987-08-03 | 1991-03-27 | 西安石油学院 | 悬浮式涡流地震检波器 |
| DE3933866A1 (de) * | 1989-08-05 | 1991-04-11 | Fromme Theo | Zwangsgefuehrter schlitzwandgreifer |
-
1993
- 1993-03-23 DE DE4309269A patent/DE4309269A1/de not_active Withdrawn
-
1994
- 1994-03-19 KR KR1019950704136A patent/KR0177262B1/ko not_active Expired - Fee Related
- 1994-03-19 JP JP6520521A patent/JP2719611B2/ja not_active Expired - Fee Related
- 1994-03-19 EP EP94911826A patent/EP0689636B1/de not_active Revoked
- 1994-03-19 WO PCT/DE1994/000307 patent/WO1994021884A1/de not_active Ceased
- 1994-03-19 CN CN94191553A patent/CN1046987C/zh not_active Expired - Fee Related
- 1994-03-19 DE DE59403029T patent/DE59403029D1/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE4309269A1 (de) | 1994-09-29 |
| WO1994021884A1 (de) | 1994-09-29 |
| KR960701280A (ko) | 1996-02-24 |
| DE59403029D1 (de) | 1997-07-10 |
| CN1046987C (zh) | 1999-12-01 |
| CN1119884A (zh) | 1996-04-03 |
| EP0689636A1 (de) | 1996-01-03 |
| JP2719611B2 (ja) | 1998-02-25 |
| JPH08506394A (ja) | 1996-07-09 |
| KR0177262B1 (ko) | 1999-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE19608980C2 (de) | Vorrichtung zum Bohren im Erdreich | |
| DE2553112C2 (de) | Bohrgerät | |
| DE1926293B2 (de) | Abstelleinrichtung zum senkrechten lagern von bohrrohr- und schwerstangenzuegen | |
| DE2734185C2 (de) | Anlage zum Niederbringen eines Bohrlochs für Pfahlgründungen | |
| EP0689636B1 (de) | Zweischaufelgreifer zum herstellen zylindrischer bohrungen | |
| DE1298472B (de) | Einrichtung zum Ziehen und Nachlassen des Bohrgestaenges in Bohrtuermen oder Bohrinseln | |
| EP2322724A1 (de) | Unterwasserbohranordnung und Verfahren zum Einbringen eines rohrförmigen Gründungselements in den Gewässergrund | |
| EP0412477B1 (de) | Zwangsgeführter Schlitzwandgreifer | |
| DE60014837T2 (de) | Baggergreifer für fundamentwände und quadratische pfähle, und bagger ausgestattet mit solch einem greifer | |
| EP3919684B1 (de) | Tiefbaumaschine und verfahren zum erstellen eines schlitzes im boden | |
| DE2542012C3 (de) | Vorrichtung zum Eintreiben eines Rammpfahles | |
| AT363044B (de) | Vorrichtung zum niederbringen einer verrohrten tiefbohrung zur herstellung einer verrohrten pfahlgruendung | |
| DE2405142B1 (de) | Bohrgreifer fuer Pfahlgruendungen und Brunnenbohrungen | |
| DE2815149B2 (de) | Verfahren und Vorrichtung zum Hochbrechen eines Schachtes durch Aufwärtsbohren aus dem Vollen | |
| DE2433015C3 (de) | Hebevorrichtung mit einem vertikal festlegbaren Mast | |
| DE2550595A1 (de) | Einen rammbaeren und ein rohr aufweisende vorrichtung zur herstellung von erdbohrungen und in diesen angeordneten pfaehlen aus geschuettetem oder verdichtetem beton und verfahren unter verwendung der vorrichtung | |
| DE3601713A1 (de) | Fahrbare bohr- und rammanlage | |
| DE3441520A1 (de) | Vorrichtung zum roden von stubben | |
| DE597189C (de) | Greifbohrer | |
| AT340325B (de) | Zweiseilgreifer zum ausheben von bodenmaterial | |
| DE2934310A1 (de) | Vorrichtung zum fuehren von rammgut, insbesondere bohlen, kanaldielen u.dgl., am maekler eines rammgeraets | |
| DE2626077A1 (de) | An einem seil o.dgl. haengende greifervorrichtung | |
| DE7702842U1 (de) | Bagger | |
| DE1217885B (de) | Als Vorsatzgeraet fuer einen Bagger ausgebildetes Rammgeruest, insbesondere fuer dieHerstellung von Ortbeton-Rammpfaehlen | |
| AT33167B (de) | Gesteinsschrotvorrichtung. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19951007 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR IT |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| 17Q | First examination report despatched |
Effective date: 19961004 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR IT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRE;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED.SCRIBED TIME-LIMIT Effective date: 19970604 Ref country code: FR Effective date: 19970604 |
|
| REF | Corresponds to: |
Ref document number: 59403029 Country of ref document: DE Date of ref document: 19970710 |
|
| EN | Fr: translation not filed | ||
| PLBQ | Unpublished change to opponent data |
Free format text: ORIGINAL CODE: EPIDOS OPPO |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| 26 | Opposition filed |
Opponent name: STAHL- UND APPARATEBAU HANS LEFFER GMBH Effective date: 19980304 |
|
| PLBF | Reply of patent proprietor to notice(s) of opposition |
Free format text: ORIGINAL CODE: EPIDOS OBSO |
|
| PLBF | Reply of patent proprietor to notice(s) of opposition |
Free format text: ORIGINAL CODE: EPIDOS OBSO |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19990413 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20010103 |
|
| PLBO | Opposition rejected |
Free format text: ORIGINAL CODE: EPIDOS REJO |
|
| APAC | Appeal dossier modified |
Free format text: ORIGINAL CODE: EPIDOS NOAPO |
|
| APAE | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOS REFNO |
|
| APAC | Appeal dossier modified |
Free format text: ORIGINAL CODE: EPIDOS NOAPO |
|
| APAC | Appeal dossier modified |
Free format text: ORIGINAL CODE: EPIDOS NOAPO |
|
| RDAH | Patent revoked |
Free format text: ORIGINAL CODE: EPIDOS REVO |
|
| RDAG | Patent revoked |
Free format text: ORIGINAL CODE: 0009271 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT REVOKED |
|
| 27W | Patent revoked |
Effective date: 20030411 |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |