EP0896124B1 - Système multi-outils utilisable pour le raccordement de conduites - Google Patents
Système multi-outils utilisable pour le raccordement de conduites Download PDFInfo
- Publication number
- EP0896124B1 EP0896124B1 EP98401836A EP98401836A EP0896124B1 EP 0896124 B1 EP0896124 B1 EP 0896124B1 EP 98401836 A EP98401836 A EP 98401836A EP 98401836 A EP98401836 A EP 98401836A EP 0896124 B1 EP0896124 B1 EP 0896124B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cleaning
- pipes
- devices
- arms
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
- B08B9/02—Cleaning pipes or tubes or systems of pipes or tubes
- B08B9/021—Cleaning pipe ends or pipe fittings, e.g. before soldering
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B41/00—Equipment or details not covered by groups E21B15/00 - E21B40/00
- E21B41/04—Manipulators for underwater operations, e.g. temporarily connected to well heads
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B43/00—Methods or apparatus for obtaining oil, gas, water, soluble or meltable materials or a slurry of minerals from wells
- E21B43/01—Methods or apparatus for obtaining oil, gas, water, soluble or meltable materials or a slurry of minerals from wells specially adapted for obtaining from underwater installations
- E21B43/013—Connecting a production flow line to an underwater well head
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49718—Repairing
- Y10T29/49719—Seal or element thereof
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49718—Repairing
- Y10T29/49721—Repairing with disassembling
- Y10T29/49723—Repairing with disassembling including reconditioning of part
- Y10T29/49725—Repairing with disassembling including reconditioning of part by shaping
- Y10T29/49726—Removing material
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49764—Method of mechanical manufacture with testing or indicating
- Y10T29/49769—Using optical instrument [excludes mere human eyeballing]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/53—Means to assemble or disassemble
- Y10T29/53087—Means to assemble or disassemble with signal, scale, illuminator, or optical viewer
Definitions
- the present invention relates to a multi-tool system usable for the connection of flexible or rigid pipes and, more especially for inspection, cleaning and replacement organs in underwater oil installations.
- connection systems are designed so that the connection means are mounted in an end device which is integral with the fixed assembly.
- the verification tests sealing performed before operational use of the pipeline or periodically in use are defective, it is necessary repair or change the connection means and, in particular, the sealing members. Therefore, one or more complicated interventions and very expensive are essential because the organs requiring or the interventions are arranged inside the fixed assembly.
- the subject of this last request concerns in particular a receptacle which is integral with the fixed structure on which is mounted a flexible pipe considered to be fixed, said receptacle receiving, at inside, the two ends of the fixed and mobile flexible pipes to connect.
- the receptacle includes a front wall and a rear wall for passage of pipe ends, dimensions internal of said receptacle being chosen such that the interior space is sufficient to completely move the locking means of the ends connected in their final connection position.
- the object of the present invention is to propose a multi-tool system or intervention unit, which can be ordered by the ROV when it is independent of the latter, that is to say not included in the ROV, or which can be integrated into the ROV, for example housed in the lower case if possible.
- the present invention relates to a multi-tool system for the inspection, cleaning and replacement of organs in a petroleum installation, characterized in that it comprises a support on which are mounted means capable of moving laterally to at least two devices in opposite directions, at least one of said devices being capable of being rotated around a of said directions.
- An advantage of the present invention is that it is possible to inspect the elements or organs arranged in the receptacle when the fixed installation has one, before any intervention.
- the same system can be used in underwater installations and whether or not including a receptacle.
- Another advantage of the present invention is that after the inspection, the system can carry out, if necessary, a cleaning said elements and / or members housed in the receptacle.
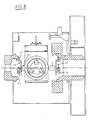
- the multi-tool system is intended to be implemented in a fixed underwater installation, said installation being shown partially and comprising a fixed structure 1 on which is mounted a receptacle 2 for receiving the fixed end 3 of a flexible pipe and the movable end 4 of another flexible pipe, said fixed 3 and mobile 4 ends having the same axis 36 and are shown in their non-connected state, the locking means 5 having been unlocked, via a locking device locking / unlocking 6, in order to allow the separation of said ends 3 and 4.
- the multi-tool system 7 comprises a support frame or cassette 8 on which are mounted two arms 9 and 10 which pivot at one of their ends around pivot axes 11 mounted on a workpiece support 12 of the cassette 8.
- the end 13 of the arm 10 is inclined towards the interior and it is provided with an oblong hole 14.
- the end 15 of the arm 9 is also inclined towards the inside of the cassette and comprises also an oblong hole 16, the end 15 having a longer length as large as that of end 13.
- Arms 9 and 10 are moved laterally in opposite directions which are, in the examples shown, aligned with the axis 36 of the ends 3 and 4 of the pipes, at by means of a double jack 17 comprising two rods 18 and 19 connected arms 9 and 10 respectively. It is also possible to use two separate cylinders each acting on one of the arms 18, 19.
- the support assembly 20 includes a device for changing and fitting 22 of a seal 23 mounted in the fixed end 3, a stud 24 being inserted into the oblong hole 16 and fixed at one end of an end piece 25.
- the change and setting elements place 22 includes three regularly distributed units, for example at 120 ° from each other, on a plate 26 ( Figure 5). All support 21 comprises an end plate 27 provided with a stud 28 which is inserted into the oblong hole 14.
- a device 29 comprises a plate 30 driven in rotation by a motor 31 and on which a camera 32 is mounted, at least one cleaning brush 33 and at least one nozzle 34 for propelling a jet of cleaning fluid (Figure 4).
- the motor 31 rotates the device 29 relative to the support assembly 21, the axis of rotation of the motor 31 being aligned for example with axis 36.
- a handle 35 is fixed on the cassette 8 and allows the manipulation of the multi-tool system using an ROV, cassette 8 being likely to rotate around the axis 36.
- the multi-tool system is brought by the ROV into receptacle 2, with the two arms 9 and 10 in their close position, as shown in Figure 1.
- a first phase (FIG. 2), the jack 17 is actuated to extend the rod 18 which pushes the arm 9 while doing so pivot around its pivot axis 11 until the stud 24 comes into abutment at the bottom of the oblong hole 16. Then, under the action of the jack 17, the entire support 20 is translated on its guide rails up to that the device 22 comes into the appropriate position for removing the seal 23, gripping and 37 or placement members a new seal being provided for this purpose on the device 22. When the gasket has been removed, the assembly 20 is returned to its initial position and the assembly 21 is moved towards the movable end 4 under the action of the jack 17 and the rod 19 which pivots the arm 10 until the device 29 either in the inspection and cleaning position.
- the camera 32 inspects the surface condition of the contact surfaces 38 of the movable end 4.
- the device 29 is rotated so that the nozzles 34 project a jet of cleaning liquid, after which the brushes 33 are actuated to clean the entire surface of said surfaces 38.
- Cassette 8 is extracted from receptacle 2 to evacuate the seal defective and recovery of a new seal.
- Cassette 8 fitted with a new seal is introduced again, in its initial position, in the receptacle 2 for the installation of said new seal on the bearing surfaces 39.
- Figures 6 to 8 show a second embodiment of the multi-tool system according to the invention.
- the cassette 8 is equipped with a frame on which are mounted a pair of devices 29 and 29a and a pair of devices 22 and 22a, the frame being capable of rotate, inside the cassette 8, around a vertical axis 40, so successively bring the devices concerned into their position work i.e. with regard to the elements to be inspected, cleaned or switch.
- Each device 29, 29a comprises a camera 32, nozzles for liquid propulsion 34 and at least one brush 33 and one motor 31.
- each device 22, 22a comprises means for receipt of a new seal 23a and means for removing seal 23 from the fixed end 3.
- a new seal 23a is mounted on a device 22a while the other device 22 proceeds to removal of the gasket to be replaced 23.
- the inspection and cleaning devices 29 ranges 38 and 39 of the movable and fixed ends are in action, the brushes 33 cleaning said staves.
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- Physics & Mathematics (AREA)
- Environmental & Geological Engineering (AREA)
- Fluid Mechanics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Mechanical Engineering (AREA)
- Cleaning In General (AREA)
- Earth Drilling (AREA)
- Adhesives Or Adhesive Processes (AREA)
- Compositions Of Macromolecular Compounds (AREA)
- Dental Preparations (AREA)
- Transition And Organic Metals Composition Catalysts For Addition Polymerization (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Medicines Containing Material From Animals Or Micro-Organisms (AREA)
- Endoscopes (AREA)
- Mutual Connection Of Rods And Tubes (AREA)
Description
- la figure 1 est une vue schématique en élévation et partiellement en coupe d'un premier mode de réalisation du système selon la présente invention et disposé dans un réceptacle équipant une structure fixe,
- la figure 2 est la même vue que la figure 1, le système étant dans une position de travail,
- la figure 3 est la même vue que la figure 1, le système étant dans une autre position de travail,
- les figures 4 et 5 sont d'autres vues latérales du système multi-outils des figures 1 à 3,
- la figure 6 est une vue de dessus du système selon un deuxième mode de réalisation de l'invention,
- les figures 7 et 8 sont des vues de côté du système représenté sur la figure 6.
Claims (10)
- Système multi-outils pour l'inspection, le nettoyage et le remplacement d'organes effectués dans une installation pétrolière sous-marine, caractérisé en ce qu'il comprend un support (8) sur lequel sont montés des moyens (9, 10, 17) susceptibles de déplacer latéralement au moins deux dispositifs (22, 29) dans des directions opposées, au moins un desdits dispositifs (29) étant susceptible d'être entraíné en rotation autour d'une desdites directions.
- Système selon la revendication 1, caractérisé en ce qu'il comprend au moins un dispositif d'inspection et de nettoyage (29).
- Système selon la revendication 1, caractérisé en ce qu'un des dispositifs (22) est constitué par des moyens d'enlèvement et de mise en place d'un joint d'étanchéité (23) monté sur une extrémité (3) d'une conduite flexible.
- Système selon les revendications 1 à 3, caractérisé en ce que les moyens de déplacement sont constitués par au moins deux bras (9, 10) qui sont déplacés chacun vers une extrémité (3, 4) d'une conduite flexible, lesdites extrémités (3, 4) des conduites étant disposées en regard l'une de l'autre et séparées par un espace, lesdites extrémités présentant un même axe longitudinal (36).
- Système selon l'une des revendications 1 à 4, caractérisé en ce que le support est constitué par un boítier (8) sur lequel sont montés à pivotement lesdits bras.
- Système selon la revendication 4, caractérisé en ce qu'il comprend des moyens de déplacement (17) agissant sur lesdits bras.
- Système selon la revendication 6, caractérisé en ce que les moyens de déplacement sont constitués par un vérin (17) à double tige (18, 19), chaque tige (18, 19) coopérant avec un desdits bras (9,10).
- Système selon la revendication 2, caractérisé en ce que le dispositif (29) comprend une plaque (30) sur laquelle sont montées une caméra d'inspection (32) des portées (38, 39) des extrémités des conduites flexibles et au moins une brosse de nettoyage (33) desdites portées.
- Système selon la revendication 8, caractérisé en ce que le dispositif (29) comprend en outre des buses (34) de propulsion d'un liquide de nettoyage.
- Système selon l'une des revendications 1 à 3, caractérisé en ce que le support est monté rotatif autour d'un axe perpendiculaire (40) à l'axe (36) des extrémités des conduites et en ce qu'il comprend deux outils d'enlèvement (22, 22a) et de mise en place d'un joint d'étanchéité (23) et deux dispositifs d'inspection et de nettoyage (29, 29a) des portées (38, 39) des extrémités (3, 4) des conduites.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9710221A FR2767179B1 (fr) | 1997-08-08 | 1997-08-08 | Systeme multi-outils utilisable pour le raccordement de conduites |
| FR9710221 | 1997-08-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0896124A1 EP0896124A1 (fr) | 1999-02-10 |
| EP0896124B1 true EP0896124B1 (fr) | 2001-09-12 |
Family
ID=9510192
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98401836A Expired - Lifetime EP0896124B1 (fr) | 1997-08-08 | 1998-07-20 | Système multi-outils utilisable pour le raccordement de conduites |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US6154953A (fr) |
| EP (1) | EP0896124B1 (fr) |
| AT (1) | ATE205579T1 (fr) |
| AU (1) | AU737338B2 (fr) |
| BR (1) | BR9802854A (fr) |
| CA (1) | CA2244550A1 (fr) |
| DE (1) | DE69801624D1 (fr) |
| FR (1) | FR2767179B1 (fr) |
| NO (1) | NO313893B1 (fr) |
| OA (1) | OA10831A (fr) |
| ZA (1) | ZA986570B (fr) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7493817B2 (en) * | 2005-06-23 | 2009-02-24 | Operations Technology Development, Nfp | Underground pipe inspection device and method |
| US8596348B2 (en) * | 2009-08-05 | 2013-12-03 | Baker Hughes Incorporated | Downhole connector maintenance tool |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3508410A (en) * | 1968-10-30 | 1970-04-28 | Ocean Systems | Submerged pipeline repair system |
| US3655122A (en) * | 1970-10-20 | 1972-04-11 | George A Brown | Pipe line cleaner and sealer |
| US3905061A (en) * | 1974-07-29 | 1975-09-16 | Browning Ferris Industries | Apparatus for flame-cleaning pipe |
| FR2381657A1 (fr) * | 1977-02-24 | 1978-09-22 | Commissariat Energie Atomique | Vehicule autopropulse a bras articules |
| GB1596782A (en) * | 1977-02-26 | 1981-08-26 | Fmc Corp | Method and apparatus for completing diverless subsea flowline connections |
| US4372003A (en) * | 1980-06-10 | 1983-02-08 | International Tool & Supply Co., Inc. | Industrial pipe thread cleaner |
| US4403363A (en) * | 1980-09-04 | 1983-09-13 | Hess John L | Pipe thread cleaner |
| DE3139691A1 (de) * | 1981-10-06 | 1983-04-21 | Kraftwerk Union AG, 4330 Mülheim | Reinigungsvorrichtung fuer die innenumfangsflaechen von rohrleitungen oder hohlzylindrischen behaeltern, insbesondere an rohrinnen-manipulatoren |
| US4673313A (en) * | 1985-04-11 | 1987-06-16 | Mobil Oil Corporation | Marine production riser and method for installing same |
| US4657449A (en) * | 1986-05-12 | 1987-04-14 | J. Marich & Sons | Internal sewage line stub cutting tool having automatic bit adjustment |
| US4763376A (en) * | 1986-05-27 | 1988-08-16 | Pene-Tech, Inc. | Maintenance inspection submersible transport apparatus |
| US4832530A (en) * | 1988-02-08 | 1989-05-23 | Andersen Scott F | Apparatus and method for joining pipe sections underwater |
| US5203646A (en) * | 1992-02-06 | 1993-04-20 | Cornell Research Foundation, Inc. | Cable crawling underwater inspection and cleaning robot |
| US5857476A (en) * | 1992-09-03 | 1999-01-12 | Bee; Robert | System for cleaning threaded and unthreaded portions of tubular members |
| DE4309026A1 (de) * | 1992-09-18 | 1994-03-24 | Sailer Johann Dipl Ing | Arbeitsvorrichtung |
| EP0773398B1 (fr) * | 1995-11-13 | 2000-09-06 | Giorgio Bormioli | Dispositif de raccordement pour tuyaux |
| US5903946A (en) * | 1996-05-31 | 1999-05-18 | Shell Oil Company | Pipe cleaning device |
| EP0819480A1 (fr) * | 1996-07-18 | 1998-01-21 | Transglobal Ltd. | Appareil de nettoyage pour oléoducs ou gazoducs |
| US5899795A (en) * | 1996-12-19 | 1999-05-04 | Penza; G. Gregory | Multi-function pipeline weld removal apparatus |
| US5862561A (en) * | 1997-07-16 | 1999-01-26 | Irwin; Lawrence F. | Waste line inspection and clean out device with water jet head |
| JPH11207821A (ja) * | 1998-01-27 | 1999-08-03 | Shonan Gosei Jushi Seisakusho:Kk | 管ライニング工法 |
-
1997
- 1997-08-08 FR FR9710221A patent/FR2767179B1/fr not_active Expired - Fee Related
-
1998
- 1998-07-20 EP EP98401836A patent/EP0896124B1/fr not_active Expired - Lifetime
- 1998-07-20 DE DE69801624T patent/DE69801624D1/de not_active Expired - Lifetime
- 1998-07-20 AT AT98401836T patent/ATE205579T1/de active
- 1998-07-23 ZA ZA986570A patent/ZA986570B/xx unknown
- 1998-07-30 AU AU78600/98A patent/AU737338B2/en not_active Ceased
- 1998-08-05 CA CA002244550A patent/CA2244550A1/fr not_active Abandoned
- 1998-08-06 BR BR9802854-5A patent/BR9802854A/pt not_active Application Discontinuation
- 1998-08-07 NO NO19983639A patent/NO313893B1/no not_active IP Right Cessation
- 1998-08-07 OA OA9800136A patent/OA10831A/en unknown
- 1998-08-10 US US09/131,626 patent/US6154953A/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| NO983639L (no) | 1999-02-09 |
| US6154953A (en) | 2000-12-05 |
| NO983639D0 (no) | 1998-08-07 |
| BR9802854A (pt) | 2000-04-25 |
| FR2767179A1 (fr) | 1999-02-12 |
| CA2244550A1 (fr) | 1999-02-08 |
| DE69801624D1 (de) | 2001-10-18 |
| NO313893B1 (no) | 2002-12-16 |
| AU737338B2 (en) | 2001-08-16 |
| ATE205579T1 (de) | 2001-09-15 |
| EP0896124A1 (fr) | 1999-02-10 |
| FR2767179B1 (fr) | 1999-09-10 |
| ZA986570B (en) | 1999-02-04 |
| AU7860098A (en) | 1999-02-18 |
| OA10831A (en) | 2003-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FR3100857A1 (fr) | Robot d’exploration de conduit comprenant un module de prise d’appui | |
| EP0879934B1 (fr) | Système et procédé de raccordement entre deux ensembles mobiles l'un par rapport à l'autre, notamment dans des installations sous-marines | |
| CH652799A5 (fr) | Dispositif pour la reception des boulons et leur maintien en cours de pose. | |
| WO2015114058A1 (fr) | Dispositif de connexion pour connecter deux circuits de fluide | |
| FR3059036B1 (fr) | Dispositif mobile d'inspection d'une ligne de production immergee partiellement dans une etendue d'eau, apte a franchir une courbure de la ligne de production, installation et procede associe | |
| EP0896124B1 (fr) | Système multi-outils utilisable pour le raccordement de conduites | |
| EP1568600B1 (fr) | Dispositif et procédé d'ancrage d'une embase sur une paroi au fond de la mer | |
| EP0897455B1 (fr) | Socle de support de manifold pour installation d'exploitation petroliere et procede de pose de l'installation | |
| FR2564055A1 (fr) | Engin de manutention apte a se deplacer sur une paroi d'inclinaison quelconque | |
| CA1280950C (fr) | Dispositif de transfert de fluide entre une structure fixe et une structure mobile en rotation utilisant au moins une conduite flexible | |
| FR3059035B1 (fr) | Dispositif mobile d'inspection d'une ligne de production, apte a franchir une zone d'eclaboussement dans une etendue d'eau, installation et procede associe | |
| FR2952320A1 (fr) | Dispositif de prehension d'un objet par serrage comportant un corps principal, des porte-mors articules et des moyens d'actionnement | |
| FR2698206A1 (fr) | Procédé et dispositif de réparation de la surface intérieure d'un adaptateur traversant le couvercle de la cuve d'un réacteur nucléaire. | |
| FR2487106A1 (fr) | Installation de remplacement d'un organe d'un circuit de fluide contamine et procede de remplacement de cet organe | |
| FR2747173A1 (fr) | Dispositif de traversee etanche d'une cloison par un organe mobile | |
| WO1997047856A2 (fr) | Systeme et procede de liaison entre deux ensembles mobiles l'un par rapport a l'autre, notamment dans des installations sous-marines | |
| WO2018091737A1 (fr) | Pince d'accrochage d'un dispositif sur une ligne de production au moins partiellement immergée dans une étendue d'eau, dispositif mobile et procédé associé | |
| EP3526503B1 (fr) | Dispositif de retenue d'un embout de connexion de ligne flexible sous-marine partiellement immergee | |
| FR2500573A1 (fr) | Appareil de montage et de demontage de dispositifs de raccordement de troncons cylindriques creux, par exemple de pipe-lines | |
| CH681282A5 (en) | Cleaner for inner surface of pipe - has rotary brushes driven by separate electric motors to clean opposite sections of pipe surface, with brushes contained inside rotary cradle | |
| FR3133148A3 (fr) | Dispositif d’usinage par électroérosion d’une pluralité de barres, comprenant un equipement d’entraînement des barres immergé. | |
| FR2590622A1 (fr) | Appareil de realisation de travaux a canalisations multiples | |
| FR2635036A1 (fr) | Dispositif porteur d'outils pour realiser des interventions sur les parois de la boite a eau d'un appareil tubulaire | |
| FR2672657A1 (fr) | Appareil pour circuit de fluide, a embase standard et bloc actif remplacable, et procede de remplacement du bloc actif d'un tel appareil. | |
| EP0773060A1 (fr) | Chambre à vide |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 19981211 |
|
| AKX | Designation fees paid |
Free format text: AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| 17Q | First examination report despatched |
Effective date: 20001211 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20010912 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20010912 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20010912 |
|
| REF | Corresponds to: |
Ref document number: 205579 Country of ref document: AT Date of ref document: 20010915 Kind code of ref document: T |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: FRENCH |
|
| REF | Corresponds to: |
Ref document number: 69801624 Country of ref document: DE Date of ref document: 20011018 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20011009 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011212 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011212 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011213 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011214 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020326 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: CA |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020720 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020731 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020731 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020731 |
|
| 26N | No opposition filed | ||
| BERE | Be: lapsed |
Owner name: *COFLEXIP Effective date: 20020731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030201 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20120726 Year of fee payment: 15 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130720 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IE Payment date: 20150630 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20150717 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20150703 Year of fee payment: 18 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160720 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160801 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20170331 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160720 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160720 |