EP0903960A1 - Antenne formée d'une pluralité de capteurs acoustiques - Google Patents
Antenne formée d'une pluralité de capteurs acoustiques Download PDFInfo
- Publication number
- EP0903960A1 EP0903960A1 EP98460031A EP98460031A EP0903960A1 EP 0903960 A1 EP0903960 A1 EP 0903960A1 EP 98460031 A EP98460031 A EP 98460031A EP 98460031 A EP98460031 A EP 98460031A EP 0903960 A1 EP0903960 A1 EP 0903960A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- sensors
- antenna
- antenna according
- acoustic
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R3/00—Circuits for transducers
- H04R3/005—Circuits for transducers for combining the signals of two or more microphones
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R2201/00—Details of transducers, loudspeakers or microphones covered by H04R1/00 but not provided for in any of its subgroups
- H04R2201/40—Details of arrangements for obtaining desired directional characteristic by combining a number of identical transducers covered by H04R1/40 but not provided for in any of its subgroups
- H04R2201/401—2D or 3D arrays of transducers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R2201/00—Details of transducers, loudspeakers or microphones covered by H04R1/00 but not provided for in any of its subgroups
- H04R2201/40—Details of arrangements for obtaining desired directional characteristic by combining a number of identical transducers covered by H04R1/40 but not provided for in any of its subgroups
- H04R2201/403—Linear arrays of transducers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R2201/00—Details of transducers, loudspeakers or microphones covered by H04R1/00 but not provided for in any of its subgroups
- H04R2201/40—Details of arrangements for obtaining desired directional characteristic by combining a number of identical transducers covered by H04R1/40 but not provided for in any of its subgroups
- H04R2201/405—Non-uniform arrays of transducers or a plurality of uniform arrays with different transducer spacing
Definitions
- the present invention relates to an acoustic antenna formed from a plurality of discrete acoustic transducers, in particular an acoustic reception antenna, that is to say formed of a plurality of acoustic sensors or microphones. Being given the principle of reciprocity, the invention also applies to an antenna emission acoustics.
- the main purpose of an acoustic receiving antenna is to reduce all defects in reception while retaining useful information, i.e. information issued by the speaker or by the useful source.
- the acoustic signals received on the antenna sensors are damaged by: (1) other issuers; (2) multi-path propagation; (3) in some cases, a echo; (4) electronic noise from sensors and amplifiers; and (5) possibly, the quantization noise for digital processing.
- the disturbances (1) to (3) will be say “spatially coherent” or simply “coherent” while the disturbances (4) and (5) are said to be “inconsistent”.
- Antenna processing can be seen as a dot product in the frequency domain.
- the signal at the end of the processing is expressed in the form:
- a conventional antenna processing consists in putting the signal back in phase, possibly weighting the sensors to establish a compromise between the opening of the main lobe and the level of the secondary lobes, and in calculating this sum.
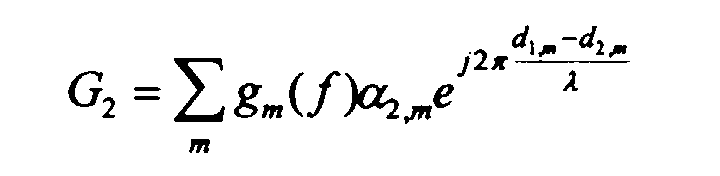
- We can express it by a set of coefficients: w m (( f ) g m (( f ) e j 2 ⁇ f vs d 1, m with g m ( f ) real and positive
- these equations are based on a propagation model which is very well adapted in free field without obstacles.
- the propagation model can be replaced by measurements.
- the vectors d 2 ( f ) represent measured propagation vectors.
- the network Since we only use fractions of sensibilities of the sensors, the network produces a response which has a signal / noise ratio lower than it would be if we used the full sensitivity of each sensor. Else hand, if the distance between the sensors is too large or too small compared to the wavelength, antenna performance drops.
- document FR-A-2 472 326 describes a method of optimization of a linear geometry of acoustic antenna, with conventional summation of the signals sensors. We can consider that it is a linear delay-sum antenna at variable spacing. This antenna only works well around a frequency in narrow band and the antenna is relatively large compared to the wavelength.
- the document FR-A-2722637 describes a geometry antenna in which the sensors are distributed in a horizontal plane on a line concave towards a speaker. We add the signals from the sensors in phase.
- the antenna is decomposed into sub-antennas each characterized by a specific spacing between sensors and each assigned to a part of the frequency band. In bass frequencies, we always encounter difficulties.
- the treatments mentioned so far do not solve certain difficulties because, on the one hand, the sound signals to be processed belong to a frequency spectrum to broadband, occupying several octaves, for example from 100 to 8000 Hz and, on the other hand, there are near-field sound sources for which is not verified the propagation of sound waves by plane waves.
- a small conventional antenna cannot be selective at low frequencies.
- An object of the present invention is to provide an antenna processing which improves existing conventional treatment, starting with treatment of superdirective genre in which the module is processed so as not to distort useful signal from a near-field acoustic source which respects a number of constraints.
- Another object of the invention consists in providing an antenna composed of a plurality of acoustic sensors whose output signals are processed, the signal processing output being higher in quality than the output signal from a state antenna of the technique when the useful acoustic source is in the near field.
- Another object of the invention consists in providing, an antenna whose processing provides better selectivity at low frequencies.
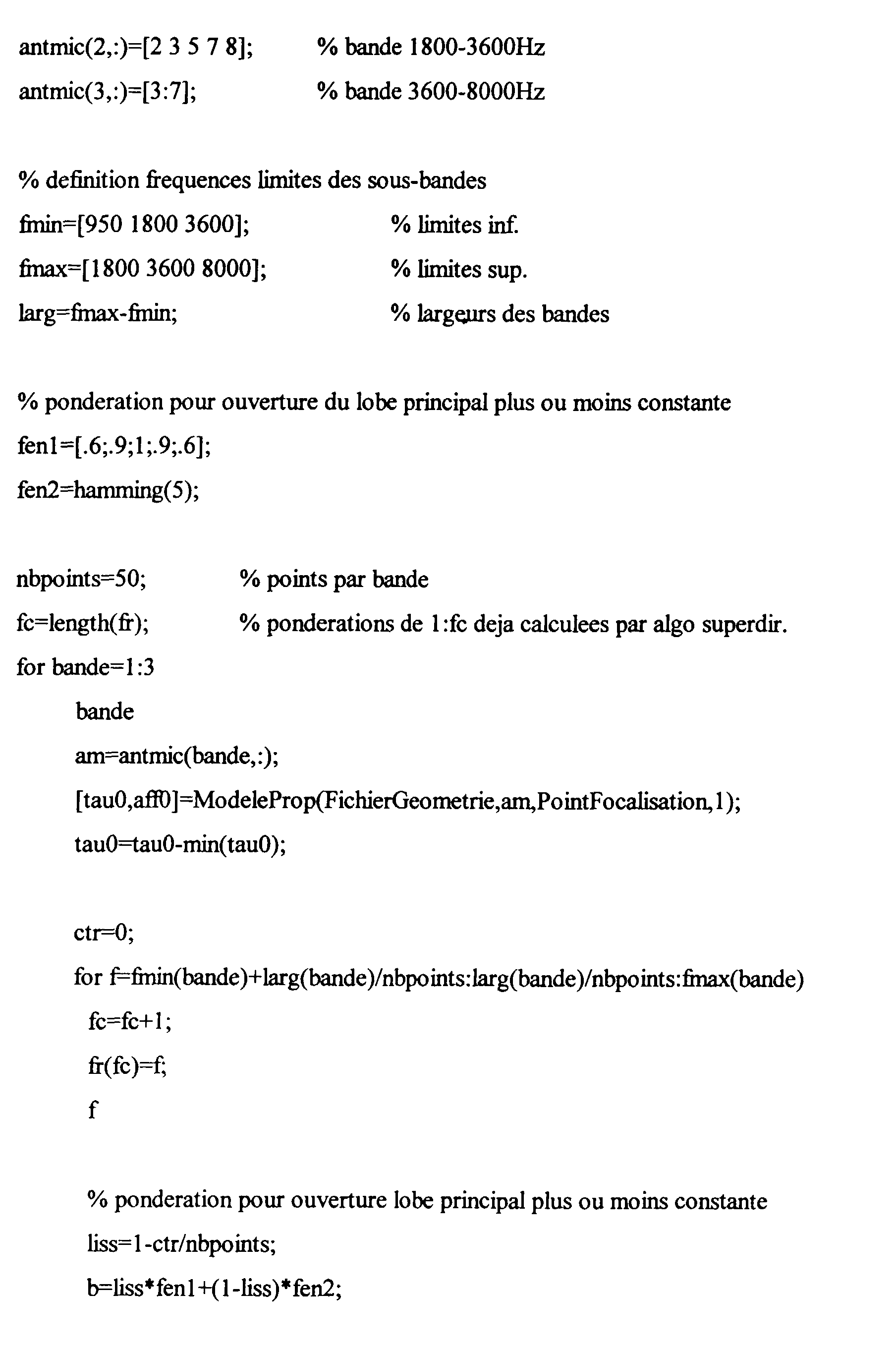
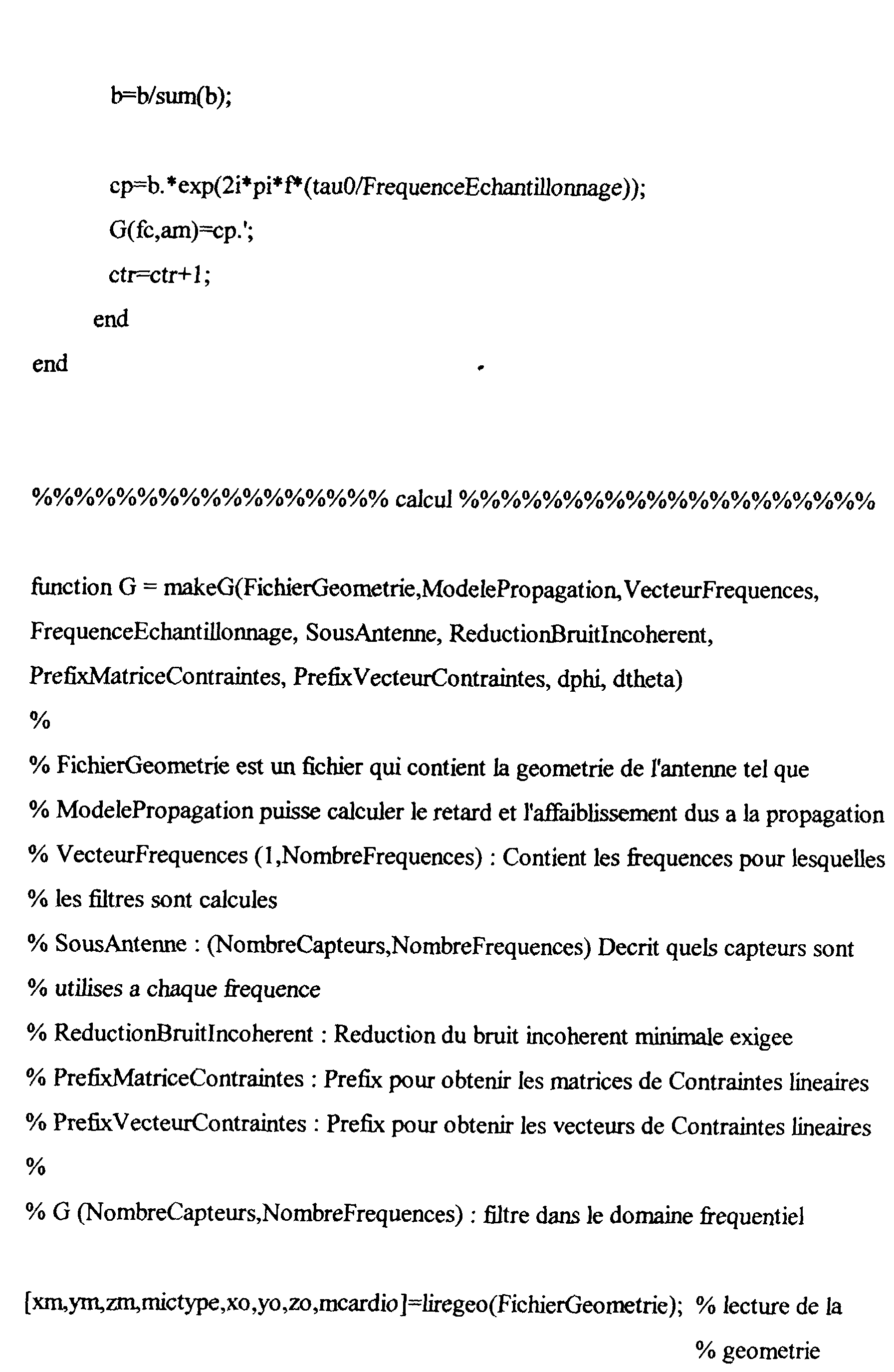
- said processing is carried out by an operator mathematical in a flowchart called superdirective-module-phase or SDMP whose the input data is the antenna geometry and model data propagation, weighting data and stress data mentioned above, and whose output data are, in the frequency domain, the coefficients of a plurality of digital filters as numerous as the sensors acoustic.
- an antenna formed of a plurality acoustic sensors, a first part placed in front of a useful source close consists of sensors aligned in a first row and a second part placed behind the first row in relation to the near useful source consists of sensors aligned in at least a second row.
- the common direction of the rows of sensors in the first and second parts are transverse to the mean direction of useful acoustic waves.
- the common direction of the rows of sensors in the first and second parts are slightly oblique to the direction mean useful acoustic waves.
- the sensors of the first part are distributed symmetrically in a logarithmic fashion around the median sensor.
- the sensors of the first part are selectively assigned to several sub-antennas, each sub-antenna being associated with a determined band of frequencies and the sensors selectively assigned to this sub-antenna delivering output signals which are processed by conventional processing, the frequency bands being contiguous and the whole of them not falling below practically 1 kHz, each processing consisting of a specific filtering and the the output signals of each specific filter being summed.
- each output signal of a sensor is filtered by a filter that performs, at the same time, the SDMP algorithm for bass frequencies, cutting into frequency bands according to the antenna method logarithmic, and classical channel formation for frequencies not processed by the SDMP algorithm.
- a propagation model is used.
- Fig. 1 symbolically shows the SDMP 10 organization chart which receives input data of a set 11 containing the digital data relating to the topographic location of the antenna sensors as well as the useful source, a set 12 containing the data relating to the linear constraints, of a set 13 containing the data relating to the spatial weighting, of a set 14 containing the data relating to the constraints on the chosen reduction of the inconsistent noise, and a set 15 containing the data relating to the definitions of the sub-antennas.
- the flowchart 10 delivers output data to a set 16, the data of output being relative to a set of coefficients of M digital filters in the domain frequency, M being equal to the number of sensors of the antenna.
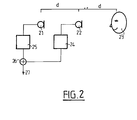
- the antenna is formed by two acoustic sensors or microphones 21 and 22 placed one behind the other in relation to a useful speaker or acoustic source 23.
- the sensors 21 and 22 and the useful source 23 are aligned.
- the distance d between sensors is, for example, 30 cm and is equal to the distance from sensor 21 to the source 23.
- This very simple antenna thus symbolizes sound pickup in the near field.
- the two sensors have a omnidirectional directivity diagram.
- the outputs of sensors 21 and 22 are respectively connected to the inputs of low-pass filters 24 and 25 whose outputs are connected to the inputs of a summator 26 which outputs the antenna output signal at 27.
- the useful signal is also added in phase, but the amplitude of the signal on the sensor 2 is two times smaller than on the sensor 1, which leads to an amplification of the power of the useful signal equal to:
- the directivity factor tends to infinity if the frequency tends to zero.
- the processing is less robust, because the useful signal is weak at the output.
- FIG. 5 shows an embodiment of a processing - filtering, summation - at the output of sensors 21 and 22 in the field temporal.
- the outputs of sensors 21 and 22 are respectively connected to the inputs microphone amplifiers 28 and 29 whose outputs are respectively connected at the inputs of analog-digital converters 30 and 31 whose outputs are respectively connected to the memory inputs 32 and 33 made up of registers with shift comprising, for example, thirty-two cells each.
- the lateral exit of a memory cell 30, associated with sensor 24, is connected to a door input 34.1.n whose second input receives a signal of coefficient h.l.n.
- the lateral exit of a memory cell 31, associated with sensor 25, is connected to a door entry 34.2.n whose second input receives a signal of coefficient h.2.n.
- the parameters n mentioned above vary discreetly from one to thirty-two depending on the rank of the cell in the shift register.
- the outputs of doors 34.1.n and 34.2.n are connected to the corresponding inputs of a digital summator 26 whose output delivers at 27 the antenna signal.
- Fig. 6 the variation of the directivity factor as a function of the frequency, in hypothesis (a), is indicated by the curve al, which decreases from 25 dB to 5 dB below of 100 Hz, shows that we improve performance at low frequencies compared to those of a conventional antenna indicated by the curve Id.
- the curve 2a indicates the variation of the reduction.
- curve 1b shows that the low frequency performance up to 5 dB, i.e. where solutions classics don't work well.
- Curve 2b corresponds to the variation of the minimum reduction imposed.
- curve 1c shows that we can gain between 2 dB for low frequencies and 0.6 dB for high.
- Line 2c identical to line 2d corresponds to the variation of the minimum reduction imposed.
- a useful source 100 U-shaped antenna comprising thirteen sensors 101 to 113 which in the example described are forward directional cardioid pattern sensors, i.e. the region containing source 100 relative to the antenna.
- the first nine sensors 101 at 109 are aligned symmetrically around the sensor 105 on a first straight line D1
- the two following sensors 110 and 111 are arranged on a second straight line D2
- the two last sensors 112 and 113 on a third straight line D3.
- Lines D1, D2 and D3 are parallel and perpendicular to a straight line D4 passing through the sensor 105 and on which the useful source 100 is installed.
- the distance from the source 100 to the right D1 is 60 cm and the lines D2 and D3 are respectively placed behind the right D1 at 15 and 30 cm.
- the sensors 110 and 112 are aligned behind the sensor 101 and sensors 111 and 113 are aligned behind sensor 109 so that train the legs of the U.
- the intervals between the sensors 105, 104, 103, 102 and 101 vary increasing logarithmically and symmetrically to intervals between sensors 105, 106, 107, 108 and 109.
- the interval is 2.5 cm; between 104 and 103, it is 2.5 cm; between 103 and 102, 5 cm; and between 102 and 101, 10 cm
- the sensor 110 is placed 15 cm behind sensor 101, like 111 behind 109, and sensor 112 is placed 15 cm behind the sensor 110, like 113 behind 112.
- FIG. 8 illustrates the frequency implementation of the filtering output signals from sensors 101 to 113 in Fig. 7.
- the sensor 101 supplies a amplifier A01 followed by an analog-digital converter B01 followed by a circuit C01 operating according to the Fast Fourier transformation algorithm (TFR with zero padding) connected to the serial input of a D01 filter whose output is connected to an input corresponding of an SOM adder.
- TFR Fast Fourier transformation algorithm
- the parallel input of filter D01 receives the clearance coefficients calculated by the SDMP flowchart for this filter.
- Fig. 8 we have included the sensor 113 which supplies an amplifier A13 followed by an analog-digital converter B13 followed by a circuit c13, operating like circuit C01, connected to the serial input of a filter D13, the output of which is connected to a corresponding input of the SOM adder.
- the parallel input of filter D13 receives also a set of coefficients calculated by the SDMP organization chart.
- the output of the SOM adder is connected to a circuit E operating according to a Reverse Fast Fourier Transformation algorithm (TFRI with Overlap Add) followed by a digital analog converter F which delivers the output signal from the antenna. .
- TFRI with Overlap Add Reverse Fast Fourier Transformation algorithm
- the algorithm can be performed in real time using a DSP (Texas Instruments C50).
- the antenna of FIG. 7 in four sub-antennas including the first three, in which the sensors 101 to 109 operate from the line D1, are used to cover three octaves at high frequencies and the fourth in which all the sensors 101 to 113 intervene is used for cover low frequencies from 0 to 1 kHz.
- the sensors 101 to 109 are symmetrically distributed in a logarithmic manner, which allows in a way known per se to reduce the number of sensors, here to nine. A number of five sensors per octave band is sufficient.
- the sensors 103 to 107 are used, constituting the first sub-antenna, for the band 4 to 7 kHz; sensors 102, 103, 105, 107 and 108, constituting the second sub-antenna, for the band 2 to 4 kHz; and the sensors 101, 102, 105, 108 and 109, constituting the third sub-antenna, for the band 1 to 2 kHz.
- the processing involves all the sensors 101 to 113 using the algorithm of the invention, that is to say taking into account the module differences and phase differences on sensors 110 to 113, of a similar to the processing mentioned above for the antenna of FIG. 2.
- the treatment according to the invention is useful for a wide band of frequencies, for example for speech a band going from 20 Hz to 7 kHz.
- a variant of the antenna of FIG. 6 comprises, opposite a source useful 200, thirteen sensors 201 to 213 with directivity diagram in cardioid.
- the nine first sensors 201 to 209 are symmetrically aligned around the sensor 205 on a first straight line D1, the two sensors along 210 and 211 are arranged on a second line D2 and the last two sensors 212 and 213 on a third line D3.
- Lines D1 to D3 are parallel and perpendicular to a line D4 passing through the sensor 205 and the useful source 200.
- the mutual distances between the lines D1 to D3 and the source 200 are identical to those mentioned in About the antenna of Fig. 6.
- the mutual distances between the sensors 201 to 209 are identical to those that exist between sensors 101 to 109.
- Sensors 210 and 212 are aligned behind the middle of segment 201-202 and the sensors 211 and 213 aligned behind the middle of the segment 208-209. In depth, their mutual distances are the same as in FIG. 7. The offsets of the sensors 210 at 213 towards the center of the antenna earns it the antenna designation in Pi.
- Pi antenna output signals are processed according to the flowchart superdirective-module-phase of the invention.
- FIG. 10 another variant of the antenna of FIG. 6 has in front of a useful source 300, thirteen sensors 301 to 313 with a cardioid directivity diagram.
- the first nine sensors 301 to 309 have, on the right Dl, the same arrangement as the first nine sensors of FIG. 6.
- the last four sensors 310 to 313 are successively aligned according to the same line D4 in FIG. 6, behind 305 so as to form, with the sensors 301 to 309, a T-shaped antenna.
- the distance between the sensors 310 and 305 is 10 cm, as between sensors 311 and 310, between 312 and 311, and between 313 and 312.
- T-antenna output signals are processed according to the flowchart superdirective-module-phase of the invention.
- a set 11 which contains the digital data relating to the topographic location of the antenna sensors as well as the useful source. This set 11 still contains data relating to the propagation and / or, as mentioned above, measures of responses impulse.
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Otolaryngology (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Signal Processing (AREA)
- Variable-Direction Aerials And Aerial Arrays (AREA)
- Circuit For Audible Band Transducer (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Obtaining Desirable Characteristics In Audible-Bandwidth Transducers (AREA)
Abstract
Description

- xm
- signal du capteur m, aussi nommé observation
- t
- temps
- up,m
- directivité du capteur m dans la direction de la source p
- sp
- signal émis par la source p
- dp,m
- distance source p - capteur m
- c
- vitesse de propagation
- bm (t)
- bruit incohérent (bruit électrique et de quantification) sur le capteur m

X, S, B observation, signal émis et bruit dans le domaine fréquentiel f fréquence


le gain complexe du signal utile :







- un facteur de directivité élevé,
- un signal utile peu distordu, et
- une réduction élevée du bruit incohérent.
où C(f) est une matrice de vecteurs de propagation,
et
p(f) est un vecteur de gaiin complexe pour chaque vecteur de propagation.


- avec l'hypothèse (a), il n'y a pas de contrainte pour l'amplification du bruit incohérent,
- avec l'hypothèse (b), on accepte une amplification du bruit incohérent compris entre 0 et 5 dB, et
- avec l'hypothèse (c), on prend une réduction du bruit incohérent égale à la
solution classique, c'est-à-dire
.






Claims (11)
- Antenne formée d'une pluralité de capteurs acoustiques caractérisée en ce que les signaux de sortie des capteurs sont soumis à un traitement du genre superdirectif, avec une contrainte en ce qui concerne le module et une contrainte non linéaire qui fixe la réduction du bruit incohérent, la formulation théorique de ces contraintes étant la suivante:
et - Antenne suivant la revendication 1, caractérisé en ce que ledit traitement est encore soumis à une autre contrainte signifiant la présence d'un ou de plusieurs zéros du diagramme de directivité dans une ou des directions données, c'est-à-dire:
et
p(f) est un vecteur de gain complexe pour chaque vecteur de propagation. - Antenne suivant la revendication 1 ou 2, caractérisée en ce que ledit traitement est concrétisé par un opérateur mathématique dans un organigramme dit superdirectif-module-phase ou SDMP dont les données d'entrée sont les données de géométrie de l'antenne et de modèle de propagation, les données de pondération et les données relatives aux contraintes mentionnées ci-dessus, et dont les données de sorties sont, dans le domaine fréquentiel, les coefficients d'une pluralité de filtres numériques aussi nombreux que les capteurs acoustiques.
- Antenne suivant une revendication 1 à 3, caractérisée en ce qu'elle est formée d'une pluralité de capteurs acoustiques dont une première partie placée en face d'une source utile proche se compose de capteurs alignés dans une première rangée et une seconde partie placée derrière la première rangée par rapport à la source utile proche se compose de capteurs alignés dans au moins une deuxième rangée.
- Antenne suivant la revendication 4, caractérisée en ce que la direction commune des rangées de capteurs dans, les première et seconde parties sont transversales à la direction moyenne des ondes acoustiques utiles.
- Antenne suivant la revendication 4, caractérisée en ce que la direction commune des rangées de capteurs dans les première et seconde parties sont légèrement obliques par rapport à la direction moyenne des ondes acoustiques utiles.
- Antenne suivant une des revendications de 4 à 6, caractérisée en ce que les capteurs de la première partie sont répartis symétriquement d'une manière logarithmique autour du capteur médian.
- Antenne suivant la revendication 7, caractérisée en ce que les capteurs de la première partie sont sélectivement affectés à plusieurs sous-antennes, chaque sous-antenne étant associée à une bande déterminée de fréquences et les capteurs sélectivement affectés à cette sous-antenne délivrant des signaux de sortie qui sont traités par un traitement classique, les bandes de fréquences étant jointives et leur ensemble ne descendant pas au-dessous de pratiquement 1 kHz, chaque traitement consistant en un filtrage spécifique et les signaux de sortie de chaque filtre spécifique étant sommés.
- Antenne suivant la revendication 8, caractérisée en ce que chaque signal de sortie d'un capteur est filtré par un filtre qui réalise, à la fois, l'algorithme SDMP pour les basses fréquences, la découpe en bandes de fréquences selon la méthode d'antenne logarithmique, et la formation de voie classique pour les fréquences non traitées selon l'algorithme SDMP.
- Antenne suivant l'une quelconque des revendications 1 à 9, caractérisée en ce qu'on utilise un modèle de propagation.
- Antenne suivant l'une quelconque des revendications 1 à 9, caractérisée en ce qu'on utilise une mesure des vecteurs de propagation
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9711458A FR2768290B1 (fr) | 1997-09-10 | 1997-09-10 | Antenne formee d'une pluralite de capteurs acoustiques |
| FR9711458 | 1997-09-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0903960A1 true EP0903960A1 (fr) | 1999-03-24 |
| EP0903960B1 EP0903960B1 (fr) | 2003-10-29 |
Family
ID=9511091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98460031A Expired - Lifetime EP0903960B1 (fr) | 1997-09-10 | 1998-08-13 | Antenne formée d'une pluralité de capteurs acoustiques |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6160757A (fr) |
| EP (1) | EP0903960B1 (fr) |
| JP (1) | JP4491081B2 (fr) |
| DE (1) | DE69819273T2 (fr) |
| FR (1) | FR2768290B1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7292833B2 (en) * | 2000-04-28 | 2007-11-06 | France Telecom, Sa | Reception system for multisensor antenna |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6978159B2 (en) * | 1996-06-19 | 2005-12-20 | Board Of Trustees Of The University Of Illinois | Binaural signal processing using multiple acoustic sensors and digital filtering |
| US6987856B1 (en) | 1996-06-19 | 2006-01-17 | Board Of Trustees Of The University Of Illinois | Binaural signal processing techniques |
| US7157649B2 (en) * | 1999-12-23 | 2007-01-02 | New Transducers Limited | Contact sensitive device |
| AU2001261344A1 (en) | 2000-05-10 | 2001-11-20 | The Board Of Trustees Of The University Of Illinois | Interference suppression techniques |
| GB0116310D0 (en) * | 2001-07-04 | 2001-08-29 | New Transducers Ltd | Contact sensitive device |
| US7274794B1 (en) | 2001-08-10 | 2007-09-25 | Sonic Innovations, Inc. | Sound processing system including forward filter that exhibits arbitrary directivity and gradient response in single wave sound environment |
| EP1415506A2 (fr) * | 2001-08-10 | 2004-05-06 | Rasmussen Digital APS | Systeme de traitement du son presentant une reponse du gradient arbitraire |
| US6937938B2 (en) | 2002-09-04 | 2005-08-30 | Stanley A. Sansone | Method and apparatus for interferometry, spectral analysis, and three-dimensional holographic imaging of hydrocarbon accumulations and buried objects |
| US6871149B2 (en) * | 2002-12-06 | 2005-03-22 | New Transducers Limited | Contact sensitive device |
| US7512448B2 (en) | 2003-01-10 | 2009-03-31 | Phonak Ag | Electrode placement for wireless intrabody communication between components of a hearing system |
| US7945064B2 (en) * | 2003-04-09 | 2011-05-17 | Board Of Trustees Of The University Of Illinois | Intrabody communication with ultrasound |
| US7076072B2 (en) | 2003-04-09 | 2006-07-11 | Board Of Trustees For The University Of Illinois | Systems and methods for interference-suppression with directional sensing patterns |
| US7317764B2 (en) * | 2003-06-11 | 2008-01-08 | Lucent Technologies Inc. | Method of signal transmission to multiple users from a multi-element array |
| EP1634479B1 (fr) * | 2004-05-19 | 2011-10-26 | Harman International Industries, Incorporated | Agencement de haut-parleurs de vehicule |
| WO2008156700A2 (fr) * | 2007-06-15 | 2008-12-24 | Worcester Polytechnic Institute | Procédés et systèmes de localisation de précision |
| EP2305007B1 (fr) * | 2008-07-08 | 2012-12-12 | Koninklijke Philips Electronics N.V. | Procédés et appareil permettant de déterminer les positions relatives d'unités d'éclairage à led |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4536887A (en) * | 1982-10-18 | 1985-08-20 | Nippon Telegraph & Telephone Public Corporation | Microphone-array apparatus and method for extracting desired signal |
| EP0652686A1 (fr) * | 1993-11-05 | 1995-05-10 | AT&T Corp. | Groupement adaptatif de microphones |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5715319A (en) * | 1996-05-30 | 1998-02-03 | Picturetel Corporation | Method and apparatus for steerable and endfire superdirective microphone arrays with reduced analog-to-digital converter and computational requirements |
-
1997
- 1997-09-10 FR FR9711458A patent/FR2768290B1/fr not_active Expired - Lifetime
-
1998
- 1998-08-13 EP EP98460031A patent/EP0903960B1/fr not_active Expired - Lifetime
- 1998-08-13 DE DE69819273T patent/DE69819273T2/de not_active Expired - Lifetime
- 1998-08-20 US US09/137,036 patent/US6160757A/en not_active Expired - Lifetime
- 1998-09-09 JP JP25518298A patent/JP4491081B2/ja not_active Expired - Lifetime
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4536887A (en) * | 1982-10-18 | 1985-08-20 | Nippon Telegraph & Telephone Public Corporation | Microphone-array apparatus and method for extracting desired signal |
| EP0652686A1 (fr) * | 1993-11-05 | 1995-05-10 | AT&T Corp. | Groupement adaptatif de microphones |
Non-Patent Citations (3)
| Title |
|---|
| F.KHALIL,J.P.JULLIEN,A.GILLOIRE: "MICROPHONE ARRAY FOR SOUND PICKUP IN TELECONFERENCE SYSTEM", JOURNAL OF AUDIO ENG.SSOC., vol. 42, no. 9, September 1994 (1994-09-01), U.S.A., pages 691 - 700, XP000699730 * |
| MAN MOHAN SONDHI,GARY W. ELKO: "ADAPTIVE OPTIMIZATION OF MICROPHONE ARRAYS UNDER A NON LINEAR CONSTRAINT", ICASSP 86 PROCEEDINGS, vol. 2, April 1986 (1986-04-01), TOKYO, pages 981 - 984, XP002067510 * |
| VON RAINER ZELINSKI: "MIKROFON-ARRAYS MIT SUPERDIREKTIVEN EINGESCHAFTEN ZUR SPRACHSIGNALÜBERTRAGUNG", FREQUENZ, no. 50, September 1996 (1996-09-01), pages 198 - 204, XP000678040 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7292833B2 (en) * | 2000-04-28 | 2007-11-06 | France Telecom, Sa | Reception system for multisensor antenna |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11146494A (ja) | 1999-05-28 |
| JP4491081B2 (ja) | 2010-06-30 |
| FR2768290B1 (fr) | 1999-10-15 |
| US6160757A (en) | 2000-12-12 |
| DE69819273T2 (de) | 2004-07-22 |
| FR2768290A1 (fr) | 1999-03-12 |
| EP0903960B1 (fr) | 2003-10-29 |
| DE69819273D1 (de) | 2003-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0903960B1 (fr) | Antenne formée d'une pluralité de capteurs acoustiques | |
| EP0605281B1 (fr) | Procéde de débruitage vectoriel de la parole et dispositif de mise en oeuvre | |
| EP2122607B1 (fr) | Procede de reduction active d'une nuisance sonore | |
| EP2680262B1 (fr) | Procédé de débruitage d'un signal acoustique pour un dispositif audio multi-microphone opérant dans un milieu bruité | |
| Fischer et al. | Beamforming microphone arrays for speech acquisition in noisy environments | |
| JP2009506683A (ja) | 強調された位相差値を使用して雑音弁別を改良するための方法および装置 | |
| JP2009506363A (ja) | センサアレイにおけるデバイスおよび/または信号のミスマッチに適応するための方法および装置 | |
| JP2009506672A (ja) | 減衰ファクタを用いて雑音弁別を改良するための方法および装置 | |
| FR2828327A1 (fr) | Procede et dispositif de reduction d'echo | |
| EP0015852B1 (fr) | Appareillage permettant la mesure de la puissance acoustique totale ou directive émise par une source quelconque | |
| Benesty et al. | Array beamforming with linear difference equations | |
| EP1277372B1 (fr) | Systeme de reception pour antenne multicapteur | |
| Hines et al. | Evaluation of the endfire response of a superdirective line array in simulated ambient noise environments | |
| Berkun et al. | A tunable beamformer for robust superdirective beamforming | |
| EP1438871B1 (fr) | Dispositif de saisie et restitution du son utilisant plusieurs capteurs | |
| FR2858512A1 (fr) | Procede et dispositif de traitement de donnees sonores en contexte ambiophonique | |
| EP1155497B1 (fr) | Procede et systeme de traitement de signaux d'antenne | |
| CA2031719C (fr) | Procede et dispositif pour imposer un diagramme de rayonnement au repos a un reseau d'antennes de reception a formation adaptative de faisceau par le calcul | |
| Zhao et al. | Optimal design of directivity patterns for endfire linear microphone arrays | |
| CA2365334A1 (fr) | Procede et dispositif pour le traitement d'interferences dans des signaux recus par un reseau de capteurs | |
| Levi et al. | An alternate approach to adaptive beamforming using srp-phat | |
| FR2967861A1 (fr) | Systeme electroacoustique pour une salle de spectacle | |
| Nakajima et al. | Improved microphone array system | |
| JP3627138B2 (ja) | 雑音白色化方法 | |
| WO2022170541A1 (fr) | Réseau de microphones différentiels de premier ordre ayant un formeur de faisceaux orientable |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE GB IT |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 19990406 |
|
| AKX | Designation fees paid |
Free format text: DE GB IT |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE GB IT |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20031029 |
|
| REF | Corresponds to: |
Ref document number: 69819273 Country of ref document: DE Date of ref document: 20031204 Kind code of ref document: P |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20040730 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20080812 Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 732E Free format text: REGISTERED BETWEEN 20100812 AND 20100818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090813 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20170825 Year of fee payment: 20 Ref country code: GB Payment date: 20170725 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 69819273 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20180812 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20180812 |