EP0936591A1 - Dispositif de positionnement et de suivi de véhicules à distance - Google Patents
Dispositif de positionnement et de suivi de véhicules à distance Download PDFInfo
- Publication number
- EP0936591A1 EP0936591A1 EP99430001A EP99430001A EP0936591A1 EP 0936591 A1 EP0936591 A1 EP 0936591A1 EP 99430001 A EP99430001 A EP 99430001A EP 99430001 A EP99430001 A EP 99430001A EP 0936591 A1 EP0936591 A1 EP 0936591A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- signals
- digital
- module
- mobile
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000004891 communication Methods 0.000 claims abstract description 27
- 238000000034 method Methods 0.000 claims abstract description 12
- 238000012544 monitoring process Methods 0.000 claims description 8
- 230000005540 biological transmission Effects 0.000 abstract description 16
- 230000001755 vocal effect Effects 0.000 abstract description 7
- 230000006870 function Effects 0.000 description 6
- 230000001413 cellular effect Effects 0.000 description 3
- 230000009977 dual effect Effects 0.000 description 3
- 238000006677 Appel reaction Methods 0.000 description 2
- 241001644893 Entandrophragma utile Species 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 230000029305 taxis Effects 0.000 description 2
- 230000002950 deficient Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000033001 locomotion Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/127—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station
Definitions
- Vehicle position control is carried out from a generally fixed base with PC, modem and software.
- This document describes a link system (telecommunication) between the mobiles and the fixed device by a telephone network analog cellular; each mobile is equipped with a GPS receiver, a mobile phone, a DTMF coder and a DTMF decoder; the latitude and longitude data of the mobile delivered by the GPS receiver are transformed into DTMF signals (pairs of voice frequencies) to be transmitted to the fixed device also equipped with a DTMF encoder and decoder.
- DTMF coding being characteristic of telecommunications analog
- this document specifies that in the case where the connection between the mobile and the fixed device is carried out by a network of digital cellular telecommunications, such as according to the GSM standard, data is transmitted by network messaging services digital, such as SMS or GPRS from GSM.
- the object of the invention is to propose a method and a system improved positioning and tracking of vehicles remotely.
- the invention consists in proposing a on-board device for positioning and / or remote monitoring of vehicles from a checkpoint, said device comprising a digital telephone and comprising means for converting numerical data, in particular tachometric or position data in audible signals.
- the system is structured around a classic GSM phone (vocal) in “hands-free use”.
- Programming modes standard portable devices allow to redirect speaker and microphone signals to an external connector. Therefore, the calls are managed in automatic answer mode and LF signals are processed by an external module. It is also possible to dial a number and call the base or another phone.
- the transmission between the base and the mobiles is preferably provided by DTMF codes (dual tone modulation frequency).
- DTMF codes dual tone modulation frequency
- These codes (1 of 16) consist of the association of two frequencies chosen from a high frequency group (1209 to 1633 Hz) and a group low frequency (697 and 941 Hz).
- Figure 1 schematically illustrates a system according to the invention transmission of digital tachometer data and / or position between a fixed base (or checkpoint) and a vehicle mobile.
- FIG. 2 illustrates the electronic means for controlling and control of transmission and reception of data equipping each mobile.
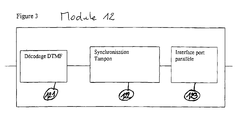
- Figure 3 illustrates DTMF decoding means of the control.
- the system works as follows: when the fixed base want to know the position of the mobile, the PC 10 software calls the mobile 2 via modem 13.
- mobile phone 23 is configured for automatic reception and therefore takes the line.
- the base then issues one or a series of DTMF codes corresponding to the function desired.
- the mobile then responds by issuing one or more codes DTMF.
- Each DTMF code chosen from 16 codes used to code 4 bits, it is necessary to send two codes to transmit a byte.
- DTMF coded messages generally consist of a header, data and a checksum.
- calling the mobile by a fixed base equipped with a device similar to device 22, figure 1 can be done by a GSM telephone without requiring the modem 13.
- Each mobile 2 can be referenced in a database (controlled by PC 10) which allows you to associate a call number with a particular motive.
- the positions received can be displayed on a map as cursors.
- digital maps allow coverage of any territory at various scales.
- Positions can be saved in a database of data for additional processing (statistics, ). It is also possible to enter a roadmap for a vehicle given and do an automatic check on the journeys actually realized. Location information can also be used to find the mobile closest to a given point, locate a mobile, calculate the remaining journey times between a vehicle and its or its destinations.
- the link between PC 10 and the mobile system can use either a modem 13 (RS232 link) connected to the public network 14, i.e. a module 11 DTMF code generation associated with a 15 mobile phone GSM type.
- the link between the decoding module 12 and the PC can use the parallel port of the microphone 10.
- the link between module 12 of decoding and the modem 13 uses the audio output of the modem (or the output Mobile phone 15).
- the link between the control electronics 22 and the card 21 of GPS location is an RS232 link.
- the link between electronics 22 control and the mobile phone 23 uses the connector "hand free ”of the portable: power supply, microphone and loudspeaker (connection analog BF).
- the DTMF codes are received by the PC 10 of modem 13 or mobile phone 15 and are decoded by a integrated circuit 121. These codes are then sent to a FIFO (buffer 122) which temporarily stores the information. This component is not essential but allows make the software more tolerant to the PC environment (other tasks assets, hardware architecture, ). The codes are then issued on the parallel port of the PC via a 123 interface.
- processor 220 manages all of the subsystems. Since the GSM is configured to deactivate the ringer, it it is necessary to integrate a buzzer 222 to warn the user of the mobile vehicle when the base wishes to have telephone contact vocal.
- the non-volatile memory 224 allows telephone access, or well local by the link 225 allowing the connection to a microphone of the type PC. Its reading allows the control of the positioning of the vehicle during the previous day (s).
- the on-board electronic device allows also to read the data from a 226 tachograph equipping the vehicle and transfer them remotely as audible signals (DTMF) scanned.
- DTMF audible signals
- the GPS receiver 20, 21 is connected to the microprocessor 220 of the specific electronic device via a serial link.
- the GPS receiver transmits cyclically to processor 220, with a period of one second, data position and validity conditions of the position calculation GPS; when validity conditions are not met (satellite not visible, ie "hidden” vehicle), the processor takes into account the last valid position data stored in memory 224.
- the processor 220 continuously scans the data coming from the DTMF 221 decoder; when an "incoming" call is made by the extension control using a coded DTMF interrogation signal, the processor processes the request by sending the digital data in response requested by the control post (for example the last ten positions stored in memory 224).
- the digital data to be transmitted are delivered the encoder 221 which converts them into pairs of voice frequencies; these audible signals are delivered by the encoder 221 to the “hands” connector free ”from telephone 23 (microphone terminals) which converts them into digital signals and transmits them to the base as a signal digitized voice.
- Processor 220 can control coding and transmission to the control base, by the same means, of additional data previously stored in memory 224, in particular the satellite number data from the receiver GPS; this data may allow calculation software integrated into the PC 10 of base 1, to determine, in deferred time, more precise, the position of a mobile (differential GPS).
- Anti-theft operation of module 22 can be triggered by a signal transmitted by the base 1 or by the mobile user; in this case, the processor 220 initiates the call by the portable 23 of a number predefined, when the position data successively delivered by the GPS receiver testify to a movement of the vehicle.
- Server analyzes request, finds phone number to call, calls the cell phone and receives its contact details. It refers to client localization plus possibly a mapping of the location of the vehicle.
- DTMF the transmission and reception functions are provided by the circuit 221 under control of processor 220.
- the standard frequency for transmitting DTMF codes being 10 Hz, each code identifying 1/16 codes or 4 bits, we obtains a transmission speed of 40 baud.
- this technology provides high reliability and supports poor transmission quality (micro-cuts, report weak signal / noise).
- a packet protocol also allows transmission resumption In case of error.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mobile Radio Communication Systems (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
- Taxis : suivi des véhicules et optimisation des courses
- Police : suivi de véhicules
- Pompiers : gestion de flotte de véhicules lors d'une intervention
- Bus : gestion des temps d'attente au niveau des arrêts
- Camions : suivi et contrôle des véhicules
- Coursiers : suivi des véhicules et optimisation des courses
- Antivols : repérage de véhicules.
- des moyens pour déterminer la position d'un mobile demandant des informations de guidage,
- des moyens pour générer une information de guidage en fonction de la position du mobile,
- des moyens pour transmettre cette information de guidage au mobile.
- L'impossibilité de dialogue vocal temps réel entre la base et le mobile.
- L'impossibilité d'utiliser un téléphone portable standard et de bénéficier des bas prix dus à une grande diffusion.
- La nécessité d'utiliser un « modem » pour la base et pour le mobile.
- on équipe chaque véhicule :
- d'un téléphone numérique (en particulier GSM, DECT,...),
- d'un module de réception (en particulier GPS, ARGOS, INTERSAT,...) de signaux de positionnement par satellite,
- on équipe le poste de contrôle :
- d'un calculateur équipé de moyens de communications téléphoniques,
- un module équipant chaque véhicule, qui comporte :
- un téléphone numérique,
- un module de réception de signaux de position transmis, en particulier de signaux GPS, ARGOS ou INTERSAT,
- un poste de contrôle comportant un calculateur connecté à des moyens de communication téléphonique numérique,
- chaque module comporte une interface de liaison entre le téléphone numérique et le module de réception de signaux de position, l'interface comportant des moyens de codage et décodage de signaux DTMF ou bien comportant des moyens de conversion de données de position en signaux audibles,
- le poste de contrôle comporte un module de décodage de codes DTMF ou bien comporte un module de conversion de signaux audibles en données de position, ce module étant raccordé au calculateur et aux moyens de communication téléphonique.
- le dispositif comporte une interface essentiellement numérique connectée au téléphone et au module de réception, qui comporte des moyens d'émission et de réception de signaux analogiques basse fréquence.
- l'interface de chaque module embarquable comporte :
- un processeur (microcontrôleur) associé à un logiciel résident et qui contrôle l'ensemble des sous-systèmes,
- un module ou circuit de génération et décodage de codes DTMF,
- un buzzer ou avertisseur sonore,
- une mémoire d'historique non volatile permettant le stockage des dernières positions du véhicule (buffer circulaire),
- une interface de communication avec un ordinateur de type PC permettant la lecture de la mémoire d'historique, la configuration du système et la mise à jour du logiciel résident.
caractérisé en ce qu'il comporte :
- un calculateur équipé de moyens de communication numérique,
- un module de décodage de signaux analogiques BF et/ou de signaux vocaux (en particulier de codes DTMF), ce module étant raccordé au calculateur et aux moyens de communication téléphonique.
- un module ou circuit de génération et décodage de codes DTMF,
- une mémoire tampon (FIFO, buffer circulaire) permettant des opérations asynchrones entre le mobile et la base,
- une interface compatible avec les ports parallèles de micro-ordinateurs de type PC.
- on convertit par des moyens électroniques embarqués à bord du mobile les données numériques en signaux analogiques audibles constitués de paires de fréquences vocales, et on convertit ensuite les signaux analogiques en données numériques que l'on transmet au poste de contrôle comme signal vocal, par des moyens de télécommunication numérique ;
- de préférence on convertit, par des moyens électroniques embarqués à bord du mobile, les signaux audibles transmis sous forme numérique en des signaux audibles analogiques, et on convertit ensuite les signaux audibles analogiques en un signal numérique (d'interrogation).
- Historique. Le dispositif électronique 22 intégré à chaque mobile 2 a la possibilité de travailler en mode autonome et d'enregistrer en interne la position du véhicule toutes les X minutes. Par exemple, la plage utile (période d'enregistrement) est comprise entre cinq minutes et deux heures. Lors d'un appel du mobile par la base, il est alors possible de demander la transmission de toutes les positions enregistrées. Cette fonction est utile lorsque la transmission GSM est défectueuse ou indisponible et permet de réduire les coûts de communications en réduisant la fréquence des appels. On peut également lire ces informations « en local » par l'utilisation d'un port RS232 et d'un PC raccordé au dispositif 22 embarqué.
- Une demande de dialogue par communication vocale avec le chauffeur du véhicule s'effectue par activation d'un buzzer 222. Cette fonction est nécessaire car les communications de contrôle de position se font sans sonnerie audible pour permettre une interrogation discrète.
- Nom véhicule
- Noms + password
Claims (10)
- Procédé de transmission de données numériques, en particulier de données tachymétriques et/ou de données de position, d'un mobile (2) à un poste (1) de contrôle, dans lequel on établit une télécommunication numérique entre le mobile et le poste de contrôle, caractérisé en ce que l'on transmet les données numériques sous forme de signaux audibles.
- Procédé selon la revendication 1, dans lequel on convertit par des moyens électroniques embarqués à bord du mobile les données numériques en signaux analogiques audibles constitués de paires de fréquences vocales, et dans lequel on convertit ensuite les signaux analogiques en signaux numériques que l'on transmet au poste de contrôle comme signal vocal, par des moyens de télécommunication numérique.
- Procédé selon l'une quelconque des revendications 1 ou 2, dans lequel on équipe chaque véhicule d'un téléphone (23) numérique et d'un module de réception (21) de signaux de position transmis par satellite, en particulier de signaux GPS, ARGOS ou INTERSAT,dans lequel on équipe le poste (1) de contrôle d'un calculateur (10) équipé de moyens de communications téléphoniques (13, 14, 15) numériques,et dans lequel on utilise des signaux analogiques constitués de codes DTMF pour transmettre du véhicule au poste de contrôle des données relatives à la position.
- Procédé d'interrogation à distance d'un dispositif électronique embarqué à bord d'un mobile par un poste (1) de contrôle, dans lequel on établit une communication téléphonique numérique entre le poste de contrôle et le mobile, et dans lequel on transmet un signal d'interrogation sous forme de signaux audibles, en particulier sous forme de fréquences vocales.
- Procédé selon la revendication 4, dans lequel on convertit, par des moyens électroniques embarqués à bord du mobile, les signaux audibles transmis sous forme numérique en des signaux audibles analogiques, et dans lequel on convertit ensuite les signaux audibles analogiques en un signal numérique d'interrogation.
- Système de transmission de données numériques, en particulier de données tachymétriques et/ou de positionnement et/ou de suivi à distance à partir d'un poste (1) de contrôle de véhicules, qui comporte :caractérisé en ce que :un module (2) équipant chaque véhicule, qui comporte :un téléphone (23) numérique,un module de réception (21) de signaux de position transmis, en particulier de signaux GPS, ARGOS ou INTERSAT,un poste de contrôle (1) comportant un calculateur (10) connecté à des moyens (13, 14, 15) de communication téléphonique numérique,et en ce que :chaque module (2) comporte une interface (22) de liaison entre le téléphone numérique (23) et le module (21) de réception de signaux de position, l'interface (22) comportant des moyens (220, 221) de codage et décodage de signaux DTMF ou bien comportant des moyens (220, 221) de conversion de données de position en signaux audibles,le poste (1) de contrôle comporte un module (12) de décodage de codes DTMF ou bien comporte un module (12) de conversion de signaux audibles en données de position, ce module (12) étant raccordé au calculateur (10) et aux moyens (13, 14, 15) de communication téléphonique.
- Dispositif (2) embarquable de positionnement et/ou de suivi à distance de véhicules à partir d'un poste (1) de contrôle, ledit dispositif comportant un téléphone numérique (23) et comportant des moyens (221) de conversion de données numériques, en particulier tachymétriques ou de position en signaux audibles.
- Dispositif selon la revendication 7, qui comporte une interface (22) de liaison entre le téléphone numérique (23) et le module (21) de réception de signaux de position, dans lequel l'interface (22) comporte :un processeur (220) associé à un logiciel résident et qui contrôle l'ensemble des sous-systèmes,un module (221) ou circuit de génération et décodage des codes DTMF,un buzzer (222) ou avertisseur sonore,une mémoire d'historique non volatile (224) permettant le stockage des dernières positions du véhicule,une interface de communication (225) avec un ordinateur de type PC permettant la lecture de la mémoire d'historique, la configuration du système et la mise à jour du logiciel résident.
- Poste de contrôle pour le positionnement et le suivi à distance d'une flotte de véhicules, caractérisé en ce qu'il comporte :un calculateur (10) connecté à des moyens de télécommunication (13, 14, 15) numérique,un module (12) de décodage de signaux analogiques BF et/ou de signaux vocaux ; ce module étant raccordé au calculateur et aux moyens de communication téléphonique.
- Poste selon la revendication 9, dans lequel le module (12) comporte :un module (121) ou circuit de génération et décodage de codes DTMF,une mémoire tampon (122) permettant des opérations asynchrones entre le mobile et la base,une interface (123) compatible avec les ports parallèles de micro-ordinateurs de type PC.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9802033 | 1998-02-13 | ||
| FR9802033A FR2775106A1 (fr) | 1998-02-13 | 1998-02-13 | Systeme de positionnement et de suivi de vehicules |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP0936591A1 true EP0936591A1 (fr) | 1999-08-18 |
Family
ID=9523158
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP99430001A Withdrawn EP0936591A1 (fr) | 1998-02-13 | 1999-02-10 | Dispositif de positionnement et de suivi de véhicules à distance |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0936591A1 (fr) |
| FR (1) | FR2775106A1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2168975A1 (es) * | 2000-07-20 | 2002-06-16 | Luengo Juan Jose Anaya | Transmisor de señales de aviso por la red gsm. |
| ES2189567A1 (es) * | 1999-03-24 | 2003-07-01 | Rodriguez Honorio Martel | Unidad de rastreo de moviles, tele-alarma, tele-comando y control. |
| FR2857457A1 (fr) * | 2003-07-07 | 2005-01-14 | Irisio | Dispositif de localisation d'un objet ou individu |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2221113A (en) * | 1988-06-17 | 1990-01-24 | Keith Chisholm Brown | Road vehicle locating system |
| WO1996007110A1 (fr) * | 1994-09-01 | 1996-03-07 | British Telecommunications Public Limited Company | Systeme d'informations de navigation |
| WO1996016387A1 (fr) * | 1994-11-22 | 1996-05-30 | Pedersen Heine E | Systeme de supervision de la circulation pour vehicules |
| WO1996030884A1 (fr) * | 1995-03-30 | 1996-10-03 | Willy Palle Pedersen | Communication de signaux de position provenant d'unites mobiles |
| US5652707A (en) * | 1991-01-17 | 1997-07-29 | Highwaymaster Communications, Inc. | Vehicle locating and communicating method and apparatus |
-
1998
- 1998-02-13 FR FR9802033A patent/FR2775106A1/fr not_active Withdrawn
-
1999
- 1999-02-10 EP EP99430001A patent/EP0936591A1/fr not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2221113A (en) * | 1988-06-17 | 1990-01-24 | Keith Chisholm Brown | Road vehicle locating system |
| US5652707A (en) * | 1991-01-17 | 1997-07-29 | Highwaymaster Communications, Inc. | Vehicle locating and communicating method and apparatus |
| WO1996007110A1 (fr) * | 1994-09-01 | 1996-03-07 | British Telecommunications Public Limited Company | Systeme d'informations de navigation |
| WO1996016387A1 (fr) * | 1994-11-22 | 1996-05-30 | Pedersen Heine E | Systeme de supervision de la circulation pour vehicules |
| WO1996030884A1 (fr) * | 1995-03-30 | 1996-10-03 | Willy Palle Pedersen | Communication de signaux de position provenant d'unites mobiles |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2189567A1 (es) * | 1999-03-24 | 2003-07-01 | Rodriguez Honorio Martel | Unidad de rastreo de moviles, tele-alarma, tele-comando y control. |
| ES2189567B1 (es) * | 1999-03-24 | 2004-11-16 | Honorio Martel Rodriguez | Unidad de rastreo de moviles, tele-alarma, tele-comando y control. |
| ES2168975A1 (es) * | 2000-07-20 | 2002-06-16 | Luengo Juan Jose Anaya | Transmisor de señales de aviso por la red gsm. |
| FR2857457A1 (fr) * | 2003-07-07 | 2005-01-14 | Irisio | Dispositif de localisation d'un objet ou individu |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2775106A1 (fr) | 1999-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7308272B1 (en) | Mobile phone locator | |
| CA2260762C (fr) | Systeme et procede utilisant des reseaux de telecommunications pour transmettre une position geographique en trois d a marquage temporel | |
| US7848763B2 (en) | Method for pulling geographic location data from a remote wireless telecommunications mobile unit | |
| US6516198B1 (en) | System for location reporting | |
| JP5643655B2 (ja) | 車両ナビゲーションのための遠隔目的地プログラミング | |
| US6636175B2 (en) | Method and apparatus for acquiring a remote position | |
| US20060258379A1 (en) | Method and system for delivering telematics services via a handheld communication device | |
| FR2670002A1 (fr) | Procede et systeme pour determiner la position de mobiles depuis une station de localisation et appareillage pour la mise en óoeuvre du procede. | |
| WO2001074034A2 (fr) | Fonction de localisation a la demande pour terminal mobile | |
| WO2002076006A3 (fr) | Systemes et procedes de communication entre une plate-forme d'integration et un systeme de facturation | |
| US20010011302A1 (en) | Method and apparatus for voice activated internet access and voice output of information retrieved from the internet via a wireless network | |
| US20040176106A1 (en) | System for location reporting | |
| US7248860B2 (en) | Method and system for customizing hold-time content in a mobile vehicle communication system | |
| US8046414B2 (en) | Method for accessing email attachments from a mobile vehicle | |
| EP0936591A1 (fr) | Dispositif de positionnement et de suivi de véhicules à distance | |
| EP1022915B1 (fr) | Appareil de radiotéléphonie cellulaire comportant un récepteur de diffusion hertzienne | |
| EP1396702A1 (fr) | Procédé et système pour l'estimation de données vitesse dans un unité centrale embarquée dans un véhicule | |
| EP0816803A1 (fr) | Système d'aide à la navigation et terminal de navigation pour un tel système | |
| EP1354487B1 (fr) | Reseau local de telecommunication prive | |
| KR200315125Y1 (ko) | 휴대폰을 이용한 텔레매틱스 단말기 | |
| US20040198384A1 (en) | Mobile communications device integrating positioning function and method for displaying positioning information in real time thereof | |
| FR2749732A1 (fr) | Systeme portable d'appel urgent transmis par telephone sans fil indiquant la position geographique de l'emetteur grace a un systeme de reperage par satellites | |
| WO2006130595A2 (fr) | Systeme et procede de transport de donnees electroniques | |
| KR200282481Y1 (ko) | 이동차량의 위치추적 단말장치 | |
| US20060229109A1 (en) | Method and system for initiating communication from a vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20000218 |
|
| AKX | Designation fees paid |
Free format text: AT BE CH DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AXX | Extension fees paid |
Free format text: AL PAYMENT 20000218;LT PAYMENT 20000218;LV PAYMENT 20000218;MK PAYMENT 20000218;RO PAYMENT 20000218;SI PAYMENT 20000218 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20010901 |