EP1008422B1 - Verfahren und Einrichtung zur Vermeidung von Unfällen bei handgeführten Werkzeugmaschinen durch Werkzeugblockieren - Google Patents
Verfahren und Einrichtung zur Vermeidung von Unfällen bei handgeführten Werkzeugmaschinen durch Werkzeugblockieren Download PDFInfo
- Publication number
- EP1008422B1 EP1008422B1 EP99811119A EP99811119A EP1008422B1 EP 1008422 B1 EP1008422 B1 EP 1008422B1 EP 99811119 A EP99811119 A EP 99811119A EP 99811119 A EP99811119 A EP 99811119A EP 1008422 B1 EP1008422 B1 EP 1008422B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- tool
- acceleration
- machine tool
- acceleration sensors
- cut
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 17
- 230000001133 acceleration Effects 0.000 claims description 50
- 238000011156 evaluation Methods 0.000 claims description 13
- 238000004364 calculation method Methods 0.000 claims description 6
- 238000005259 measurement Methods 0.000 claims description 5
- 230000003466 anti-cipated effect Effects 0.000 claims 2
- 230000000694 effects Effects 0.000 claims 2
- 230000000903 blocking effect Effects 0.000 description 15
- 238000006243 chemical reaction Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000009795 derivation Methods 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000004422 calculation algorithm Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000000243 solution Substances 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 239000003637 basic solution Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 238000004377 microelectronic Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2211/00—Details of portable percussive tools with electromotor or other motor drive
- B25D2211/003—Crossed drill and motor spindles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2250/00—General details of portable percussive tools; Components used in portable percussive tools
- B25D2250/221—Sensors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/13—Cutting by use of rotating axially moving tool with randomly-actuated stopping means
- Y10T408/14—Responsive to condition of Tool or tool-drive
Definitions
- the invention relates to a method and a based on the application of the method based device for preventing accidents by blocking tools when working with hand-held machine tools with rotating tool, especially for rotary hammers, with a breaker device for interrupting the action of the drive motor to the tool in response to the equipped by a movement measuring device supplied rotary motion quantity detected operating state is equipped.
- an acceleration threshold - triggers a clutch that interrupts the drive train between the drive motor and the actual tool unit, in particular the drill spindle.
- Difficulties in the two known, approach similar solutions resulting from the fact that it comes with a desired operational use of the machine, such as when working with a hammer drill in a concrete mass inhomogeneous composition to false triggering the safety clutch.
- This is related to the basic solution approach of an immediate signal evaluation without consequence estimation, that is, a signal evaluation with necessarily comparatively low safety threshold without individual evaluation of the respective accident.
- a significant improvement has been achieved with a predictive evaluation method for the signals supplied by an acceleration sensor, as described in the patent DE 43 44 817 C2.
- This improved The method is based on the idea of predictively calculating a rotation angle of the machine tool to be expected on the basis of the reaction torque during blocking or partial blocking of the tool while specifying a time constant from the rotational movement variable and then activating the safety coupling if the calculated expected twist angle is a predefinable one maximum permissible angle of rotation would exceed.
- the future behavior of the machine is evaluated immediately after the occurrence of an accident and triggered a countermeasure when the machine tool has been subjected to an angular momentum, by which an accident can no longer be avoided.
- the invention is therefore an object of the invention to improve hand-held machine tools of the type mentioned so that when blocking the tool by the reaction pulse or the reaction torque via the motion sensor triggered measurement signal also provides a clear statement about a dangerous case of blocking when the axis of rotation of the Tool is warped in case of failure, at the same time the influence of gravity acceleration on the measuring signal is to be turned off.
- the invention is in a method for preventing tool blocking accidents when working with hand-held lathe tool-making machine tools, particularly in rotary hammers, equipped with interrupter means for interrupting the action of the drive motor on the tool as a function of the rotational movement quantity delivered by a movement measuring device characterized in that the movement of the machine tool is measured on at least two spaced apart from each other and against the axis of rotation during normal operation of the tool positions of the machine tool, and that the measured values obtained before further processing and evaluation be subtracted from each other.
- a device for preventing rotational accidents due to tool blocking in a hand-held machine tool with rotating tool is characterized in that at least two acceleration sensors, preferably - especially for cost reasons - linear acceleration sensors as VerFsensoren within the housing of the machine tool to spatially from each other and are preferably mounted at different spaced locations relative to the tool axis and that the electronic evaluation unit includes a subtraction stage, in which the respective signals supplied by the acceleration sensors are subtracted from each other before the calculation of a particular signal for triggering the breaker device.
- the method according to the invention and the safety device based thereon represent an improvement of the solution described in the cited DE document, wherein the signals respectively delivered by the plurality of acceleration sensors are subtracted from each other before the expected and predeterminable angle of rotation of the machine tool is calculated.
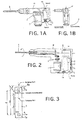
- FIGS. 1A / B and 2 show in a schematic representation the essential components of a hand-held machine tool M of interest in connection with the invention, the operating state of which is monitored by means of two acceleration sensors 1a and 1b.
- Fig. 1B is indicated by arrows, which acceleration 10 or deflection force in which deflection direction 11 act on the machine tool in the case of blocking the tool 8.
- the signals of the acceleration sensors 1a, 1b reach an electronic evaluation unit 3, which may be a microprocessor, a microcomputer executed in discrete circuit technology, a signal processor or the like.
- the digitized signals of the acceleration sensors 1a, 1b are first subtracted from each other, as explained and explained in more detail below. Subsequently, the result obtained in this way is evaluated by means of a model-based or rule-based algorithm which predicts the operating state of the handheld power tool M when the acceleration sensors 1a, 1b respond.
- the invention can also be used advantageously for those applications in which no predictive calculation of the expected twist angle of the power tool M, ie in such safety devices that assess the acceleration signal generated due to tool blocking directly and when exceeding a certain level, optionally after Störsignalfilterung , as well as single and / or double integration, directly to trigger the drive-breaker device.
- the service interruption device ie in particular a clutch 5 is actuated, which interrupts the drive train between a drive motor 7 and the tool holder or tool 8 and optionally additionally triggers a circuit breaker 6.
- the method according to the invention and the measuring system based thereon act reliably for any arbitrary axis of rotation of the overall system as well as possibly tilted or distorted tool axis, as will be explained below with reference to FIG.
- the movement measuring device has, as already mentioned, at least two acceleration sensors 1a, 1b whose measurement results according to the invention are subtracted before further processing. As can be seen from the following derivation for two possible applications, the disturbance magnitude of gravitational acceleration is eliminated for each possible application position of the power tool.
- the second sensor 1b lies in a plane enclosing the axis of rotation 9 in normal operation.
- the axis of rotation can take any position in an assumed two-dimensional sensor plane and always provides a corrected error signal, as can be seen from the subsequent mathematical derivation.
- more than two sensors can be provided, in which case the reliability of the received signal is increased by averaging or a plausibility check. If two redundant sensor pairs are provided, the intervals for a security check can in principle be extended.
- any measuring system with acceleration sensors or accelerometers ie those which are piezoelectrically, piezoresistively or inertially based and / or integrated as part of a microelectronic circuit, is suitable.
- the electronic evaluation unit can either be realized analogously with the aid of operational amplifiers and corresponding filter circuits or digitally using a microprocessor with assigned processor interfaces (cf. DE 43 44 817 C2). It is equally possible to realize the evaluation as a fuzzy logic, which is described in detail in DE 196 41 618 A1.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Percussive Tools And Related Accessories (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Drilling And Boring (AREA)
- Portable Power Tools In General (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Description
- Die Erfindung betrifft ein Verfahren sowie eine auf der Anwendung des Verfahrens beruhende Einrichtung zur Vermeidung von Unfällen durch Werkzeugblockieren beim Arbeiten mit handgeführten Werkzeugmaschinen mit rotierendem Werkzeug, insbesondere bei Bohrhämmern, die mit einer Unterbrechereinrichtung zum Unterbrechen der Wirkung des Antriebsmotors auf das Werkzeug in Abhängigkeit von dem durch eine Bewegungsmeßeinrichtung gelieferten Drehbewegungsgröße erfaßten Betriebszustand ausgerüstet ist.
- Rotationsunfälle, also insbesondere Verletzungen im Bereich des Handgelenks oder Arms oder der Sturz von Leitern, Gerüsten usw., bedingt durch das plötzliche Blockieren des Werkzeugs und das damit verbundene schnelle Ansteigen des Reaktionsmoments bei handgeführten Werkzeugmaschinen, insbesondere solchen größerer Leistung, wie Bohrhämmern, sind ein lange erkanntes und viel diskutiertes Problem. Aus der Vielzahl der bekannten Lösungsansätze für dieses Problem sei nur beispielhaft auf die Druckschriften EP 150 669 A2 sowie auf WO 88/06508 A3 hingewiesen. Durch die Verwendung eines innerhalb des oder am Gehäuse der Werkzeugmaschine angeordneten Verdrehsensors, insbesondere eines Beschleunigungssensors, der die Beschleunigung einer äußeren Schwenkbewegung der handgeführten Werkzeugmaschine erfaßt, wird - gegebenenfalls in Abhängigkeit von verschiedenen Vorgabe-Kriterien, z.B. eines Beschleunigungs-Schwellenwerts - eine Schaltkupplung auslöst, die den Antriebsstrang zwischen dem Antriebsmotor und dem eigentlichen Werkzeugaggregat, insbesondere der Bohrspindel, unterbricht. Schwierigkeiten bei den beiden bekannten, im Ansatz ähnlichen Lösungen, ergeben sich daraus, daß es auch bei einer gewünschten Betriebsnutzung der Maschine, etwa beim Arbeiten mit einem Bohrhammer in einer Betonmasse inhomogener Zusammensetzung zu Fehlauslösungen der Sicherheitskupplung kommt. Dies hängt mit dem grundsätzlichen Lösungsansatz einer unmittelbaren Signalauswertung ohne Folgeabschätzung zusammen, d.h., einer Signalauswertung mit notwendigerweise vergleichsweise niedriger Sicherheitsschwelle ohne individuelle Bewertung des jeweiligen Störfalls.
- Eine wesentliche Verbesserung wurde mit einem vorausschauenden Bewertungsverfahren für die von einem Beschleunigungssensor gelieferten Signale erreicht, wie es in der Patentschrift DE 43 44 817 C2 beschrieben ist. Diesem verbesserten Verfahren liegt der Gedanke zugrunde, unter Vorgabe einer Zeitkonstante aus der vom Beschleunigungssensor gelieferten Drehbewegungsgröße einen aufgrund des Reaktionsmoments beim Blockieren oder teilweisem Blockieren des Werkzeugs zu erwartenden Verdrehwinkel der Werkzeugmaschine vorausschauend zu berechnen und die Sicherheitskupplung dann zu aktivieren, wenn der berechnete zu erwartende Verdrehwinkel einen vorgebbaren maximal zulässigen Verdrehwinkel überschreiten würde. Dabei wird das zukünftige Verhalten der Maschine unmittelbar nach Auftreten eines Störfalls bewertet und eine Gegenmaßnahme ausgelöst, wenn die Werkzeugmaschine mit einem Drehimpuls beaufschlagt worden ist, durch den sich ein Unfall nicht mehr vermeiden läßt.
- Ein gattungsgemäße Vorrichtung ist aus US 5 401 124 A bekannt.
- Dem für die Praxis solcher handgeführter Werkzeugmaschinen vielversprechenden Lösungsansatz gemäß der genannten DE-Druckschrift haften jedoch noch zwei wesentliche, bei Versuchsreihen festgestellte, Probleme an:
- (1) die Rotationsachse des Werkzeugs liegt häufig im entscheidenden Augenblick des Blockierens nicht zwangsläufig in der Werkzeugachse; und
- (2) die Erdbeschleunigung beeinflußt das Meßsignal des Beschleunigungsmessers, und zwar abhängig von der momentanen Lage des Werkzeugs.
- Der Erfindung liegt damit die Aufgabe zugrunde, handgeführte Werkzeugmaschinen der eingangs genannten Art so zu verbessern, daß ein beim Blockieren des Werkzeugs durch den Reaktionsimpuls oder das Reaktionsmoment über den Bewegungssensor ausgelöstes Meßsignal auch dann eine eindeutige Aussage über einen gefährlichen Blockierfall liefert, wenn die Rotationsachse des Werkzeugs im Störfall verzogen ist, wobei gleichzeitig die Einflußgröße Erdbeschleunigung auf das Meßsignal ausgeschaltet werden soll.
- Die Erfindung ist bei einem Verfahren zur Vermeidung von Unfällen durch Werkzeugblockieren beim Arbeiten mit handgeführten Werkzeugmaschinen mit rotierendem Werkzeug, insbesondere bei Bohrhämmern, die mit einer Unterbrechereinrichtung zum Unterbrechen der Wirkung des Antriebsmotors auf das Werkzeug in Abhängigkeit von dem durch eine Bewegungsmeßeinrichtung gelieferten Drehbewegungsgröße erfaßten Betriebsbestand ausgerüstet ist, dadurch gekennzeichnet, daß die Bewegung der Werkzeugmaschine an mindestens zwei räumlich voneinander und gegen die Drehachse im Normalbetrieb des Werkzeugs beabstandeten Stellen der Werkzeugmaschine gemessen wird, und daß die erhaltenen Meßwerte vor einer weiteren Verarbeitung und Bewertung voneinander subtrahiert werden.
- Eine Einrichtung zur Vermeidung von Rotationsunfällen aufgrund von Werkzeugblockieren bei einer handgeführten Werkzeugmaschine mit rotierendem Werkzeug gemäß der oben erläuterten Gattung ist dadurch gekennzeichnet, daß mindestens zwei Beschleunigungssensoren, vorzugsweise - insbesondere aus Kostengründen - Linear-Beschleunigungssensoren als Verdrehsensoren innerhalb des Gehäuses der Werkzeugmaschine an räumlich voneinander und gegenüber der Werkzeugachse vorzugsweise unterschiedlich beabstandeten Stellen montiert sind und daß die elektronische Auswerteeinheit eine Subtraktionsstufe enthält, in der die von den Beschleunigungssensoren jeweils gelieferten Signale vor der Errechnung eines zur Auslösung der Unterbrechereinrichtung bestimmten Signals voneinander subtrahiert werden.
- Vorteilhafte Ergänzungen und Ausführungsarten für das erfindungsgemäße Verfahren und die darauf basierende Einrichtung sind Inhalt von jeweils abhängigen Patentansprüchen.
- Vorzugsweise und insbesondere stellt das erfindungsgemäße Verfahren und die darauf beruhende Sicherheitseinrichtung eine Verbesserung der in der genannten DE-Druckschrift beschriebenen Lösung dar, wobei die von den mehreren Beschleunigungssensoren jeweils gelieferten Signale vor der Errechnung des zu erwartenden und vorgebbaren Verdrehwinkels der Werkzeugmaschine voneinander subtrahiert werden.
- Hinsichtlich der Berechnung des zu erwartenden Verdrehwinkels, der Reduzierung oder Beseitigung nieder- bzw. hochfrequenter Störungen sowie der geeigneten mathematischen Prinzipien und Algorithmen für die zuverlässige vorausschauende Berechnung des zu erwartenden kritischen Verdrehwinkels wird wiederum auf DE 43 44 817 C2 verwiesen werden.
- Die Erfindung und vorteilhafte Einzelheiten werden nachfolgend unter Bezug auf die Zeichnung in einer beispielsweisen Ausführungsform näher erläutert. Es zeigen:
- Fig. 1A bzw. 1B
- die schematische Darstellung eines Bohrhammers in Seiten- bzw. Rückansicht als Beispiel für eine handgeführte Werkzeugmaschine, die mit zwei Beschleunigungssensoren ausgerüstet ist;
- Fig. 2
- die schematische Teilschnittdarstellung des Bohrhammers nach Fig. 1; und
- Fig. 3
- die Prinzipdarstellung eines Drehbewegungsmodells für eine Handwerkzeugmaschine gemäß Fig. 1, die im dargestellten Beispiel mit zwei Linear-Beschleunigungssensoren ausgerüstet ist.
- Die Fig. 1A/B und die Fig. 2 zeigen in einer Prinzipdarstellung die wesentlichen im Zusammenhang mit der Erfindung interessierenden Bauteile einer handgeführten Werkzeugmaschine M, deren Betriebszustand mittels zweier Beschleunigungssensoren 1a bzw. 1b überwacht wird. In Fig. 1B ist durch Hinweispfeile angedeutet, welche Beschleunigung 10 bzw. Auslenkkraft in welcher Auslenkrichtung 11 auf die Werkzeugmaschine im Falle des Blockierens des Werkzeugs 8 wirken. Über eine Eingangsschnittstelle 2 zur Signalformung, A/D-Wandlung, usw., gelangen die Signale der Beschleunigungssensoren 1a, 1b zu einer elektronischen Auswerteeinheit 3, die ein Mikroprozessor, ein in diskreter Schaltkreistechnik ausgeführter Mikrorechner, ein Signalprozessor oder ähnliches sein kann. In dieser Auswerteeinheit 3 werden die digitalisierten Signale der Beschleunigungssensoren 1a, 1b zunächst voneinander subtrahiert, wie weiter unten näher erläutert und begründet. Anschließend wird das so erhaltene Ergebnis über einen modell- oder regelbasierten Algorithmus ausgewertet, welcher den Betriebszustand der Handwerkzeugmaschine M bei Ansprechen der Beschleunigungssensoren 1a, 1b voraussagt. Die Erfindung läßt sich jedoch auch für solche Anwendungsfälle vorteilhaft einsetzen, bei denen keine vorausschauende Berechnung des zu erwartenden Verdrehwinkels der Handwerkzeugmaschine M erfolgt, also bei solchen Sicherheitseinrichtungen, die das aufgrund von Werkzeugblockieren erzeugte Beschleunigungssignal unmittelbar bewerten und bei Überschreiten eines bestimmten Pegels, gegebenenfalls nach Störsignalfilterung, sowie ein- und/oder zweimaliger Integration, direkt zur Auslösung der Antriebs-Unterbrechereinrichtung nutzen.
- Wird eine Beschleunigung durch Werkzeugblockieren detektiert, die von der Auswerteeinheit 3 als "gefährlich" eingestuft wird, so wird über eine Ausgabeschnittstelle 4 die Betriebsunterbrechungseinrichtung, also insbesondere eine Kupplung 5 betätigt, die den Antriebsstrang zwischen einem Antriebsmotor 7 und dem Werkzeughalter bzw. Werkzeug 8 unterbricht und gegebenenfalls zusätzlich einen Stromunterbrecher 6 auslöst.
- Das erfindungsgemäße Verfahren und das darauf basierende Meßsystem wirkt zuverlässig für jede beliebige Rotationsachse des Gesamtsystems sowie bei gegebenenfalls gekippter oder verzogener Werkzeugachse, wie nachfolgend unter Bezug auf Fig. 3 erläutert wird.
- Die Bewegungsmeßeinrichtung weist, wie bereits erwähnt, wenigstens zwei Beschleunigungssensoren 1a, 1b auf, deren Meßergebnisse erfindungsgemäß vor einer weiteren Verarbeitung subtrahiert werden. Wie sich aus der nachfolgenden Herleitung für zwei mögliche Anwendungsfälle ersehen läßt, wird die Störgröße Erdbeschleunigung für jede mögliche Anwendungsposition des Elektrowerkzeugs eliminiert.
- Bei der Beschleunigungsmeßeinrichtung 1 gemäß Fig. 3 ist vorgesehen, daß der zweite Sensor 1b in einer die Drehachse 9 im Normalbetrieb einschließenden Ebene liegt. Die Drehachse kann jedoch bei einer angenommenen zweidimensionalen Sensorebene jede beliebige Position einnehmen und liefert immer ein fehlerbereinigtes Signal, wie sich aus der nachfolgenden mathematischen Herleitung erkennen läßt. Auch können prinzipiell mehr als zwei Sensoren vorgesehen werden, wobei dann durch Mittelwertbildung oder eine Plausibilitätsüberprüfung die Zuverlässigkeit des erhaltenen Signals gesteigert wird. Sofern zwei redundante Sensorpaare vorgesehen werden, können die Intervalle für eine Sicherheitsüberprüfung prinzipiell gestreckt werden.
- Die in Fig. 3 angegebenen Größen bezeichnen folgendes:
- a1, a2 =
- Meßsignale des ersten Beschleunigungssensor 1a bzw. des zweiten Beschleunigungssensors 1b; insbesondere repräsentieren a1 und a2 lineare Tangentialbeschleunigungen um jeweilige Drehachsen, die nachfolgend als "Fall 1" bzw. als "Fall 2" einer näheren Betrachtung unterzogen werden.
- d =
- Abstand der Beschleunigungssensoren 1a, 1b;
- r1a1. r1b1 =
- Abstände der Beschleunigungssensoren 1a, 1b für den "Fall 1", bei dem die (gedachte) Drehachse des Werkzeugs, beispielsweise im Fall des Werkzeugblockierens gegenüber der Antriebsachse bzw. Drehachse im Normalbetrieb nach unten versetzt ist: und
- r1a2, r1b2 =
- Abstände der Beschleunigungssensoren 1a, 1b von einer (gedachten) Drehachse für den "Fall 2", d.h., wenn die Drehachse des Werkzeugs im Falle des Blockierens gegenüber der Antriebsachse bzw. Drehachse im Normalbetrieb nach oben versetzt ist;
- ϕ =
- zu erwartender Drehwinkel im Falle des Werkzeugblockierens.
- Mathematische Herleitung zu "Fall 1":



- Gleichung (3) eingesetzt in Gleichung (1) in Verbindung mit Gleichung (2) ergibt:

- Ersichtlicherweise ist der Wert ϕ̈ nicht mehr abhängig von der Erdbeschleunigung, da der Anteil der Erdbeschleunigung in beiden Beschleunigungssensorsignalen a1 bzw. a2 in gleicher Größe vorhanden ist, wie sich aus Gleichung (4) ersehen läßt, also vollständig kompensiert wird.
- Mathematische Herleitung für den "Fall 2":



- Gleichung (3') eingesetzt in Gleichung (1') in Verbindung mit Gleichung (2') ergibt:

- Auch für den "Fall 2" gilt also, daß der für die Signalauswertung zur Verfügung stehende Wert des Meßsignals, also die Drehbeschleunigung, nicht mehr abhängig ist von der für beide Beschleunigungssensoren gleichen Massenanziehung bzw. der Erdbeschleunigung.
- Im Rahmen der Erfindung eignet sich prinzipiell jedes Meßsystem mit Beschleunigungssensoren oder Beschleunigungsaufnehmern, also solche, die piezoelektrisch, piezoresistiv oder inertial basiert sind und/oder integriert als Teil einer mikroelektronischen Schaltung realisiert sind. Die elektronische Auswerteeinheit kann entweder analog realisiert sein mit Hilfe von Operationsverstärkern und entsprechenden Filterschaltkreisen oder digital unter Verwendung eines Mikroprozessors mit zugeordneten Prozessorschnittstellen (vergleiche DE 43 44 817 C2). Ebenso möglich ist es, die Auswerteeinheit als Fuzzy-Logik zu realisieren, was in DE 196 41 618 A1 ausführlich beschrieben ist.
- Zur Verwirklichung des der Erfindung zugrundeliegenden Prinzips ist prinzipiell jedes bekannte Meßverfahren für Beschleunigung, Winkelgeschwindigkeit bzw.
- Drehwinkel anwendbar. Im obigen Ausführungsbeispiel wird vor allem aus Kostengründen auf Linearbeschleunigungssensoren, beispielsweise basierend auf piezoelektrischen Meßverfahren Bezug genommen. Prinzipiell eignen sich jedoch auch Impulsrad- und magnetische Winkelschrittgeber, mikromechanische Beschleunigungssensoren, optische Meßverfahren, magnetohydrodynamische Meßverfahren, Drehbeschleunigungsmeßverfahren nach dem Ferraris-Prinzip, kapazitive Meßverfahren oder auch DMS-Beschleunigungsaufnehmer.
Claims (7)
- Verfahren zur Vermeidung von Unfällen durch Werkzeugblockieren beim Arbeiten mit einer handgeführten Werkzeugmaschine mit rotierendem Werkzeug (8), insbesondere für Bohrhämmer, die mit einer Unterbrechereinrichtung (5, 6) zum Unterbrechen der Wirkung des Antriebsmotors (7) auf das Werkzeug (8) in Abhängigkeit von dem durch eine Bewegungsmeßeinrichtung (1) erfaßten Betriebszustand ausgerüstet ist wobei die Bewegung der Werkzeugmaschine im Raum an mindestens zwei räumlich voneinander und gegen die Werkzeugachse beabstandeten Stellen der Werkzeugmaschine gemessen wird, dadurch gekennzeichnet, daß die erhaltenen Meßwerte (a1, a2) vor der Berechnung eines die Unterbrechereinrichtung (5, 6) auslösenden Signals voneinander subtrahiert werden.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, daß die Bewegung der Werkzeugmaschine im Raum an gegen die Werkzeugachse unterschiedlich beabstandeten Stellen gemessen wird.
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß als Bewegungsgröße die Beschleunigung der Werkzeugmaschine im Raum an mindestens zwei räumlich voneinander beabstandeten Stellen erfaßt wird.
- Verfahren nach Anspruch 3, dadurch gekennzeichnet, daß nach der Subtraktion der von mindestens zwei Beschleunigungssensoren gelieferten Meßwerte unter Vorgabe einer Zeitkonstante aus der durch die Subtraktion erhaltenen Drehbeschleunigungsgröße ein zu erwartender Verdrehwinkel (ϕ) der Werkzeugmaschine (M) vorausschauend berechnet und die Unterbrechereinrichtung (5, 6) aktiviert wird, sobald der berechnete, zu erwartende Verdrehwinkel einen vogebbaren maximal zulässigen Verdrehwinkel überschreitet.
- Einrichtung zur Vermeidung von Unfällen aufgrund von Werkzeugblockierens bei einer handgeführten Werkzeugmaschine mit rotierendem Werkzeug, insbesondere Bohrhämmern, die mit einer Unterbrechereinrichtung (5, 6) zum Unterbrechen der Wirkung des Antriebsmotors (7) auf das Werkzeug (8) in Abhängigkeit von dem durch eine Beschleunigungsmeßeinrichtung (1) erfaßten Betriebszustand ausgerüstet ist, dadurch gekennzeichnet, daß die Beschleunigungsmeßeinrichtung mindestens zwei innerhalb des Gehäuses der Werkzeugmaschine an räumlich voneinander und gegenüber der Werkzeugachse beabstandeten Stellen montierten Beschleunigungssensoren (1a, 1b) ausgerüstet ist, dadurch gekennzeichnet, daß die die Beschleunigungssignale (a1, a2) der Beschleunigungssensoren verarbeitende elektronische Auswerteeinheit (3) eine Subtraktionsstufe enthält, in der die von den Beschleunigungssensoren jeweils gelieferten Signale vor der Errechnung eines Auslösesignals für die Unterbrechereinrichtung (5, 6) voneinander subtrahiert werden.
- Einrichtung nach Anspruch 5, dadurch gekennzeichnet, daß die Beschleunigungssensoren (1a, 1b) Linear-Beschleunigungssensoren sind.
- Einrichtung nach Anspruch 5, dadurch gekennzeichnet, daß mindestens einer der Beschleunigungssensoren (1a, 1b) so angeordnet ist, daß er in normaler Betriebsstellung der Werkzeugmaschine ein maximales Ausgangssignal liefert.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19857061 | 1998-12-10 | ||
| DE19857061A DE19857061C2 (de) | 1998-12-10 | 1998-12-10 | Verfahren und Einrichtung zur Vermeidung von Unfällen bei handgeführten Werkzeugmaschinen durch Werkzeugblockieren |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1008422A2 EP1008422A2 (de) | 2000-06-14 |
| EP1008422A3 EP1008422A3 (de) | 2001-09-19 |
| EP1008422B1 true EP1008422B1 (de) | 2007-02-14 |
Family
ID=7890654
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP99811119A Expired - Lifetime EP1008422B1 (de) | 1998-12-10 | 1999-12-06 | Verfahren und Einrichtung zur Vermeidung von Unfällen bei handgeführten Werkzeugmaschinen durch Werkzeugblockieren |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6111515A (de) |
| EP (1) | EP1008422B1 (de) |
| JP (1) | JP4486728B2 (de) |
| CN (1) | CN1160526C (de) |
| DE (2) | DE19857061C2 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8286723B2 (en) | 2010-01-07 | 2012-10-16 | Black & Decker Inc. | Power screwdriver having rotary input control |
| US8418778B2 (en) | 2010-01-07 | 2013-04-16 | Black & Decker Inc. | Power screwdriver having rotary input control |
| USRE44311E1 (en) | 2004-10-20 | 2013-06-25 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
Families Citing this family (63)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19900882A1 (de) * | 1999-01-12 | 2000-07-13 | Bosch Gmbh Robert | Handwerkzeugmaschine |
| DE10051775A1 (de) * | 2000-10-19 | 2002-05-16 | Hilti Ag | Sicherheitsschaltung für drehendes Elektrohandwerkzeuggerät |
| DE10103142A1 (de) | 2001-01-24 | 2002-07-25 | Hilti Ag | Drehendes Elektrohandwerkzeuggerät und Startsicherheitsroutine |
| SE520435C2 (sv) * | 2001-03-30 | 2003-07-08 | Scania Cv Ab | Sätt och anordning för att bestämma cylindertryck vid en förbränningsmotor |
| DE10117121A1 (de) * | 2001-04-06 | 2002-10-17 | Bosch Gmbh Robert | Handwerkzeugmaschine |
| EP2390062B1 (de) * | 2002-09-13 | 2017-03-08 | Black & Decker Inc. | Drehwerkzeug |
| US7015409B2 (en) * | 2002-12-23 | 2006-03-21 | Milwaukee Electric Tool Corporation | Power tool trigger |
| DE10303006B4 (de) * | 2003-01-27 | 2019-01-03 | Hilti Aktiengesellschaft | Handgeführtes Arbeitsgerät |
| DE10309012B3 (de) * | 2003-03-01 | 2004-08-12 | Hilti Ag | Steuerverfahren einer axial schlagenden und drehenden Elektrohandwerkzeugmaschine |
| DE10309414B4 (de) * | 2003-03-05 | 2009-01-08 | Robert Bosch Gmbh | Sensoreinrichtung und zugehöriges Verfahren für eine Handwerkzeugmaschine |
| DE10316844A1 (de) * | 2003-04-11 | 2004-11-04 | Hilti Ag | Steuerung einer Elektrohandwerkzeugmaschine |
| US7395871B2 (en) * | 2003-04-24 | 2008-07-08 | Black & Decker Inc. | Method for detecting a bit jam condition using a freely rotatable inertial mass |
| DE10318798B4 (de) * | 2003-04-25 | 2006-01-26 | Robert Bosch Gmbh | Bohrgerät |
| DE10341974A1 (de) * | 2003-09-11 | 2005-04-21 | Bosch Gmbh Robert | Abschaltschrauber |
| DE102004003202B4 (de) | 2004-01-22 | 2022-05-25 | Robert Bosch Gmbh | Handgriff mit Erfassungseinrichtung |
| US7410006B2 (en) * | 2004-10-20 | 2008-08-12 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US20060157262A1 (en) * | 2005-01-14 | 2006-07-20 | Jui-Yu Chen | Power tool having presetable digital control of torque output |
| US7677844B2 (en) * | 2005-04-19 | 2010-03-16 | Black & Decker Inc. | Electronic clutch for tool chuck with power take off and dead spindle features |
| US7650699B2 (en) * | 2005-07-22 | 2010-01-26 | Kazuhiro Yamamoto | Electric drill |
| DK1971262T3 (da) * | 2005-12-23 | 2013-05-27 | Reactec Ltd | Overvågningsapparat til overvågning af et håndholdt værktøj |
| US8316958B2 (en) * | 2006-07-13 | 2012-11-27 | Black & Decker Inc. | Control scheme for detecting and preventing torque conditions in a power tool |
| US20080021590A1 (en) * | 2006-07-21 | 2008-01-24 | Vanko John C | Adaptive control scheme for detecting and preventing torque conditions in a power tool |
| US20090065225A1 (en) * | 2007-09-07 | 2009-03-12 | Black & Decker Inc. | Switchable anti-lock control |
| DE102008001774A1 (de) * | 2008-05-14 | 2009-11-19 | Robert Bosch Gmbh | Verfahren zum Betrieb einer Werkzeugmaschine, insbesondere einer Handwerkzeugmaschine |
| FR2935496B1 (fr) * | 2008-08-29 | 2014-05-16 | Pellenc Sa | Procede permettant l'arret des outils portatifs lors de mouvements brusques imprevus, et outils portatifs en faisant application |
| JP5537055B2 (ja) * | 2009-03-24 | 2014-07-02 | 株式会社マキタ | 電動工具 |
| JP5448569B2 (ja) * | 2009-05-21 | 2014-03-19 | 株式会社やまびこ | 安全装置付き刈払機 |
| JP5448568B2 (ja) * | 2009-05-21 | 2014-03-19 | 株式会社やまびこ | 安全装置付き作業機 |
| DE102009046789A1 (de) * | 2009-11-17 | 2011-05-19 | Robert Bosch Gmbh | Handwerkzeugmaschinenvorrichtung |
| JP5412249B2 (ja) * | 2009-11-19 | 2014-02-12 | 株式会社マキタ | 手持ち工具 |
| US9475180B2 (en) | 2010-01-07 | 2016-10-25 | Black & Decker Inc. | Power tool having rotary input control |
| US9266178B2 (en) | 2010-01-07 | 2016-02-23 | Black & Decker Inc. | Power tool having rotary input control |
| DE102010043032A1 (de) * | 2010-10-28 | 2012-05-03 | Hilti Aktiengesellschaft | Steuerungsverfahren für eine Werkzeugmaschine und eine Werkzeugmaschine |
| EP2581168A1 (de) * | 2011-10-13 | 2013-04-17 | Oy Kwh Mirka Ab | Tragbare Maschine |
| US9352456B2 (en) | 2011-10-26 | 2016-05-31 | Black & Decker Inc. | Power tool with force sensing electronic clutch |
| EP2631035B1 (de) | 2012-02-24 | 2019-10-16 | Black & Decker Inc. | Elektrisches Werkzeug |
| DE102012212377A1 (de) * | 2012-04-26 | 2013-10-31 | Robert Bosch Gmbh | Elektrowerkzeug und Verfahren zu seinem Betrieb |
| DE102012208913A1 (de) * | 2012-05-25 | 2013-11-28 | Robert Bosch Gmbh | Schlagwerkeinheit |
| DE102012208855A1 (de) * | 2012-05-25 | 2013-11-28 | Robert Bosch Gmbh | Handwerkzeugmaschine |
| GB201212958D0 (en) * | 2012-07-20 | 2012-09-05 | Hosking Peter J | Power tools |
| DE102014202585A1 (de) * | 2013-04-29 | 2014-10-30 | Robert Bosch Gmbh | Handwerkzeugbedieneinheit |
| DE102013212626B4 (de) * | 2013-06-28 | 2024-08-08 | Robert Bosch Gmbh | Handwerkzeugmaschinenvorrichtung |
| DE102014207434A1 (de) * | 2014-04-17 | 2015-10-22 | Robert Bosch Gmbh | Verfahren zum Betreiben einer Handwerkzeugmaschine, Handwerkzeugmaschine |
| CN105082261A (zh) * | 2014-05-13 | 2015-11-25 | 苏州宝时得电动工具有限公司 | 链锯及其控制方法 |
| EP3023200A1 (de) * | 2014-11-20 | 2016-05-25 | HILTI Aktiengesellschaft | Steuerungsverfahren für einen Bohrhammer |
| EP3023202A1 (de) * | 2014-11-20 | 2016-05-25 | HILTI Aktiengesellschaft | Sicherheitsverfahren und Handwerkzeugmaschine |
| EP3023203A1 (de) * | 2014-11-20 | 2016-05-25 | HILTI Aktiengesellschaft | Steuerungsverfahren für eine Handwerkzeugmaschine |
| DE102015205172A1 (de) * | 2015-03-23 | 2016-09-29 | Robert Bosch Gmbh | Werkzeugmaschine, insbesondere Handwerkzeugmaschine, mit einer motorischen Antriebseinheit und mit zumindest einer Sensorvorrichtung |
| JP2017001115A (ja) * | 2015-06-05 | 2017-01-05 | 株式会社マキタ | 作業工具 |
| KR101799432B1 (ko) * | 2015-09-22 | 2017-11-21 | 계양전기 주식회사 | 전동 공구 |
| EP3199303A1 (de) * | 2016-01-29 | 2017-08-02 | HILTI Aktiengesellschaft | Handwerkzeugmaschine |
| US10589413B2 (en) | 2016-06-20 | 2020-03-17 | Black & Decker Inc. | Power tool with anti-kickback control system |
| JP6757226B2 (ja) * | 2016-10-07 | 2020-09-16 | 株式会社マキタ | 電動工具 |
| SE540015C2 (en) | 2016-10-17 | 2018-02-27 | Husqvarna Ab | Safety arrangement and method for a floor surfacing machine |
| US11529725B2 (en) | 2017-10-20 | 2022-12-20 | Milwaukee Electric Tool Corporation | Power tool including electromagnetic clutch |
| WO2019084280A1 (en) | 2017-10-26 | 2019-05-02 | Milwaukee Electric Tool Corporation | RECLINING CONTROL METHODS FOR ELECTRIC TOOLS |
| EP3610990B1 (de) | 2018-08-14 | 2021-05-05 | Hilti Aktiengesellschaft | Steuerungsverfahren für eine handwerkzeugmaschine, handwerkzeugmaschine und system mit der handwerkzeugmaschine und einem ständer |
| CN114174002B (zh) * | 2019-09-20 | 2024-07-09 | 喜利得股份公司 | 用于操作手导式机加工工具的方法和手导式机加工工具 |
| JP7382190B2 (ja) * | 2019-09-26 | 2023-11-16 | 株式会社マキタ | 回転工具 |
| US11691262B2 (en) | 2019-09-26 | 2023-07-04 | Makita Corporation | Electric power tool |
| EP3825066A1 (de) | 2019-11-21 | 2021-05-26 | Hilti Aktiengesellschaft | Verfahren zum betreiben einer handgeführten werkzeugmaschine und handgeführte werkzeugmaschine |
| US11641102B2 (en) | 2020-03-10 | 2023-05-02 | Smart Wires Inc. | Modular FACTS devices with external fault current protection within the same impedance injection module |
| US11845173B2 (en) | 2020-10-16 | 2023-12-19 | Milwaukee Electric Tool Corporation | Anti bind-up control for power tools |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4063600A (en) * | 1976-05-05 | 1977-12-20 | Krzes Casey S | Power tool safety mechanism |
| JPS6014487B2 (ja) * | 1980-06-23 | 1985-04-13 | 株式会社明電舎 | 避雷器用素子の接着方法 |
| DE3346215A1 (de) * | 1983-12-21 | 1985-07-11 | Hilti Ag, Schaan | Handwerkzeug mit beweglich gelagerter traegheitsmasse |
| EP0303651B2 (de) * | 1987-03-05 | 1999-12-01 | Robert Bosch Gmbh | Verfahren zum unterbrechen der antriebstätigkeit, insbesondere der schlag- und/oder drehantriebstätigkeit, einer handwerkzeugmaschine |
| DE3707052A1 (de) * | 1987-03-05 | 1988-09-15 | Bosch Gmbh Robert | Verfahren zum unterbrechen der antriebstaetigkeit, insbesondere drehantriebstaetigkeit, einer handwerkzeugmaschine |
| US4866429A (en) * | 1987-08-12 | 1989-09-12 | Scientific Atlanta, Inc. | Automated machine tool monitoring device |
| US5014793A (en) * | 1989-04-10 | 1991-05-14 | Measurement Specialties, Inc. | Variable speed DC motor controller apparatus particularly adapted for control of portable-power tools |
| DE3941756A1 (de) * | 1989-12-18 | 1991-06-20 | Gildemeister Ag | Verfahren zur ermittlung der anwesenheit, der abmessungen oder der richtigen lage und position eines werkstuecks auf einer werkzeugmaschine |
| DE4112012A1 (de) * | 1991-04-12 | 1992-10-15 | Bosch Gmbh Robert | Handwerkzeugmaschine mit blockiersensor |
| US5235472A (en) * | 1991-10-18 | 1993-08-10 | Seagate Technology, Inc. | Apparatus for sensing operating shock on a disk drive |
| DE4334933C2 (de) * | 1993-10-13 | 1997-02-20 | Fraunhofer Ges Forschung | Verfahren und Vorrichtung zum zwangsweisen Abschalten von handgeführten Arbeitsmitteln |
| DE4344817C2 (de) * | 1993-12-28 | 1995-11-16 | Hilti Ag | Verfahren und Einrichtung für handgeführte Werkzeugmaschinen zur Vermeidung von Unfällen durch Werkzeugblockieren |
| DE19628945A1 (de) * | 1995-11-02 | 1997-05-07 | Bosch Gmbh Robert | Verfahren zum Unterbrechen der Antriebstätigkeit einer Handwerkzeugmaschine, sowie nach diesem Verfahren arbeitende Handwerkzeugmaschine |
| EP0771619B2 (de) * | 1995-11-02 | 2004-11-10 | Robert Bosch Gmbh | Verfahren zum Unterbrechen der Antriebstätigkeit einer Handwerkzeugmaschine, sowie nach diesen Verfahren arbeitende Handwerkzeugmaschine |
| DE19641618A1 (de) * | 1996-10-09 | 1998-04-30 | Hilti Ag | Einrichtung und Verfahren für handgeführte Werkzeugmaschinen zur Vermeidung von Unfällen durch Werkzeugblockieren |
| DE19646382A1 (de) * | 1996-11-11 | 1998-05-14 | Hilti Ag | Handgerät |
| DE19646381A1 (de) * | 1996-11-11 | 1998-05-14 | Hilti Ag | Handgerät |
-
1998
- 1998-12-10 DE DE19857061A patent/DE19857061C2/de not_active Expired - Fee Related
-
1999
- 1999-12-01 US US09/452,302 patent/US6111515A/en not_active Expired - Lifetime
- 1999-12-06 DE DE59914191T patent/DE59914191D1/de not_active Expired - Lifetime
- 1999-12-06 EP EP99811119A patent/EP1008422B1/de not_active Expired - Lifetime
- 1999-12-07 CN CNB991228626A patent/CN1160526C/zh not_active Expired - Lifetime
- 1999-12-10 JP JP35144999A patent/JP4486728B2/ja not_active Expired - Lifetime
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE44311E1 (en) | 2004-10-20 | 2013-06-25 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| USRE44993E1 (en) | 2004-10-20 | 2014-07-08 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| USRE45112E1 (en) | 2004-10-20 | 2014-09-09 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US8286723B2 (en) | 2010-01-07 | 2012-10-16 | Black & Decker Inc. | Power screwdriver having rotary input control |
| US8418778B2 (en) | 2010-01-07 | 2013-04-16 | Black & Decker Inc. | Power screwdriver having rotary input control |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4486728B2 (ja) | 2010-06-23 |
| DE19857061C2 (de) | 2000-11-02 |
| EP1008422A3 (de) | 2001-09-19 |
| EP1008422A2 (de) | 2000-06-14 |
| JP2000263304A (ja) | 2000-09-26 |
| DE59914191D1 (de) | 2007-03-29 |
| US6111515A (en) | 2000-08-29 |
| CN1160526C (zh) | 2004-08-04 |
| DE19857061A1 (de) | 2000-06-15 |
| CN1256383A (zh) | 2000-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1008422B1 (de) | Verfahren und Einrichtung zur Vermeidung von Unfällen bei handgeführten Werkzeugmaschinen durch Werkzeugblockieren | |
| EP0666148B1 (de) | Verfahren und Einrichtung für handgeführte Werkzeugmaschinen zur Vermeidung von Unfällen durch Werkzeugblockieren | |
| EP0580628B1 (de) | Handwerkzeugmaschine mit blockiersensor | |
| EP1323503B1 (de) | Einrichtung und Verfahren zum Sichern von Vorrichtungen mit frei im Raum beweglichen Teilen | |
| EP0980323B1 (de) | Anordnung zum steuern eines insassenschutzmittels eines kraftfahrzeugs | |
| EP1157899B1 (de) | Verfahren und Sicherheitssystem zur Erkennung eines Überschlages und zur Auslösung einer Sicherheitseinrichtung in einem Kraftfahrzeug | |
| EP1445075B1 (de) | Verfahren zum Überwachen eines Roboters und Roboter mit einer Überwachungseinrichtung | |
| EP1054794A1 (de) | Verfahren und vorrichtung zum auslösen eines rückhaltesystems | |
| DE3920091A1 (de) | Sicherheitseinrichtung fuer fahrzeuginsassen | |
| EP1403746B1 (de) | Verfahren zur Kollisionserkennung | |
| WO1996039315A1 (de) | Steueranordnung zur auslösung eines rückhaltemittels in einem fahrzeug bei einem seitenaufprall | |
| EP1110064B1 (de) | Verfahren und vorrichtung zum steuern eines insassenschutzmittels eines fahrzeugs | |
| DE19537546A1 (de) | Aufprallerkennungsvorrichtung, insbesondere für ein Sicherheitssystem für Fahrzeuge zur Personenbeförderung | |
| DE1914876B2 (de) | Einrichtung zum Schutz einer Anordnung zur kapazitiven Abstandsmessung | |
| EP1503922B1 (de) | Verfahren zur auslösung einer sicherheitseinrichtung in einem kraftfahrzeug bei einem überrollvorgang | |
| DE102004038984A1 (de) | Vorrichtung zur Crashdetektion | |
| EP3882505A1 (de) | Überwachungseinrichtung und ein verfahren zum betrieb einer überwachungseinrichtung | |
| DE102008043475B4 (de) | Verfahren zum Steuern einer Einrichtung und Vorrichtung zum Steuern der Einrichtung | |
| EP3734380B1 (de) | Verfahren und vorrichtung zum überwachen einer beschleunigung einer achse einer mehrachskinematik | |
| EP1444117A1 (de) | Verfahren zum aktivieren von sicherheitseinrichtungen | |
| EP1386171B1 (de) | Vorrichtung zur beschleunigungsmessung | |
| EP3394983B1 (de) | Verfahren zum betreiben eines sensorsystems, sensorelement sowie sensorsystem | |
| EP3610990B1 (de) | Steuerungsverfahren für eine handwerkzeugmaschine, handwerkzeugmaschine und system mit der handwerkzeugmaschine und einem ständer | |
| DE202020103157U1 (de) | Überwachungseinrichtung | |
| DE102005030135B4 (de) | Schallwellendetektor und Verfahren zum Aufnehmen einer Welle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE Kind code of ref document: A2 Designated state(s): CH DE GB LI NL SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20020319 |
|
| AKX | Designation fees paid |
Free format text: CH DE GB LI NL SE |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH DE GB LI NL SE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 59914191 Country of ref document: DE Date of ref document: 20070329 Kind code of ref document: P |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20070321 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20071115 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20181219 Year of fee payment: 20 Ref country code: DE Payment date: 20181210 Year of fee payment: 20 Ref country code: NL Payment date: 20181219 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20181218 Year of fee payment: 20 Ref country code: CH Payment date: 20181218 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 59914191 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MK Effective date: 20191205 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20191205 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20191205 |