EP1036898B1 - Automatic carrying and storing method of objects with selfpropelled pallets and pallet for automatic storage purposes - Google Patents
Automatic carrying and storing method of objects with selfpropelled pallets and pallet for automatic storage purposes Download PDFInfo
- Publication number
- EP1036898B1 EP1036898B1 EP00105821A EP00105821A EP1036898B1 EP 1036898 B1 EP1036898 B1 EP 1036898B1 EP 00105821 A EP00105821 A EP 00105821A EP 00105821 A EP00105821 A EP 00105821A EP 1036898 B1 EP1036898 B1 EP 1036898B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pallets
- pallet
- area
- objects
- entrance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 16
- 238000003860 storage Methods 0.000 title description 2
- 230000002093 peripheral effect Effects 0.000 claims description 3
- 239000000463 material Substances 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000003912 environmental pollution Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H6/00—Buildings for parking cars, rolling-stock, aircraft, vessels or like vehicles, e.g. garages
- E04H6/08—Garages for many vehicles
- E04H6/12—Garages for many vehicles with mechanical means for shifting or lifting vehicles
- E04H6/18—Garages for many vehicles with mechanical means for shifting or lifting vehicles with means for transport in vertical direction only or independently in vertical and horizontal directions
- E04H6/24—Garages for many vehicles with mechanical means for shifting or lifting vehicles with means for transport in vertical direction only or independently in vertical and horizontal directions characterised by use of dollies for horizontal transport, i.e. cars being permanently parked on wheeled platforms
Definitions
- the present invention relates to an automatic carrying and storing method for bulky objects such as for example cars, machines, stacks of objects, by means of self-propelled pallets.
- the object of the invention is a pallet for automatic storage purposes, in particular but not exclusively for parking cars.
- FR1336232 describes a self propelled pallet that can be used in a garage for conveying cars, in particular cars available for rent.
- the pallet has lateral orientable wheels and a central propelling unit which can be selectively raised or lowered, in the latter case to entrain the ground and to propel the pallet.
- the propelling unit can be controlled remotely.
- this document is aimed to have the tourism cars available automaticall in one supply place, like in a depository warehouse.
- the movement of the pallet according to two orthogonal directions is carried out on steering wheels can be oriented in two directions.
- the pallets are driven electrically and are equipped with batteries for driving the wheels for executing the step movements and for steering the wheels according to two orthogonal directions.
- the pallets that cover the spaces of the area do contact one another on sliding means with minimum friction.
- sliding brushes are provided running against fixed conductive paths arranged at the periphery of the area.
- a pallet that can be used for carrying and storing objects on areas comprises:
- the wheeled means comprise free rotating wheels and driven wheels steering in two orthogonal directions.
- the sliding means with minimum friction against the adjacent pallets can comprise rollers sliding on the four peripheral sides of the frame, the sliding rollers of two opposite sides being on a plane different with respect to the sliding rollers of the other two peripheral sides, whereby two adjacent pallets do not have rollers that contact each other.
- each pallet comprises also means for detecting the position with respect to a predetermined area and for communicating them the position on the area to a send-receive computing fixed unit. Furthermore, each pallet comprises means for operating and steering the steering drive wheels on the basis of signals coming from the send-receive computing fixed unit.
- Area 1 is defined by a side stiff border 2 arranged at the same height of the frames of pallet 3 in order to contain and guide them. On each pallet 3 (figure 4-7) a car 4 can be loaded.
- Pallets 3 are alike, independent from one another and self-propelled, and arranged on area 1 according to a plurality of rows and of columns.
- Pallets 3 have substantially rectangular shape and are capable of moving according to two orthogonal directions, i.e. the rows and the columns. For their manoeuvre spaces 5 are left free, each of area corresponding to that covered by each pallet 3.
- Cars 4 are loaded or unloaded onto or from pallets 3 in a zone 6 of area 1 that are used as entrance or exit. Near zone 6 are provided pedestrian platforms 7 for getting on or off the car 4. The driver has only to bring the car in entrance or exit zone 6 and leave it receiving for example an receipt ticket. The car can be closed and turned off, whereby there is an energy saving and good air quality in the parking, since all the car present in the parking are turned off.
- each pallet 3 is equipped with motor wheels 10 and with steering means 11 on at least two of them. Step movements on the two orthogonal directions are operated by a send-receive computing unit 12, whereas on board of each pallet 3 send-receive means 13 are provided for communicating with computing unit 12.
- infrared sensors 14 communicate to computing unit 12 the position of each pallet 3 within area 1. Adjacent pallets can also communicate among one another by means of proximity sensors.
- the electrical supply is given by batteries 15 that have sufficient autonomy for many hours for a continuous motion. The autonomy is then of many days since that for almost all the time the motors for driving the pallets are still.
- the batteries 15 can be charged by contacting a path under voltage provided on perimeter 2.
- the computing unit 12 can having an interface 16 for payment of tickets, for collecting parked cars and for issuing tickets or magnetic cards at the entrance.
- the area 1 is covered by a plurality of pallets 3 that are moved either for allowing the entrance or exit of other pallets or for entering or exiting themselves the parking, on demand from the users.
- pallets 3a In the example of figure 3 with a different pattern two pallet 3a at entrance and two pallet 3b at exit are indicated. In the entrance movement pallets 3a travel on free spaces of area 1 by translating according to two orthogonal directions.
- Entrance and exit movements occur as step movements that cover in turn a space corresponding to the surface covered by each pallet.
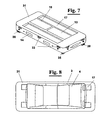
- a pallet 3 has a base frame 30, a platform 31 that covers frame 30 and supports the object, that in the case of figure 7 is a car 4, and a side frame 32 of contact and relative sliding with the adjacent pallets.
- Frame 31 is sized for bearing loads according to the weights, the resistance of the pallets body and of the objects to transport.
- the side frame 32 (fig. 4) is equipped with rollers 33 and 34 for a sliding with minimum friction.
- rollers 33,34 of two opposite sides are always on different planes. This way, it is sufficient to orient the pallets always with upper rollers 34 for example in front and on the right and lower rollers 33 as a consequence behind and on the left, so that it is assure that all the rollers are always in rolling contact with only side frames 32 of the adjacent pallets.
- the means for moving pallets 3 comprise free pivoting wheels 35 and steering driven wheels 36, rotating in two orthogonal directions by means of a hydraulic system 37 and arms 38. It is sufficient the rotation of 90° of the steering wheels for having all the four possible orthogonal movements in the two directions, since the electric wheels 36 can rotate both clockwise and counter-clockwise.
- wheels 36 can be equipped with auto-steering motor reducers. Such wheels are not are described in detail being available on the market.
- the means for detecting the position with respect to a predetermined area can be infrared sensors 14, and for communicating the position within the area to a fixed send-receive computing unit infrared send-receive means can be used as well.
- each pallet can communicate with an adjacent pallet with proximity sensors known in automatic pallet production lines.
- a parking for cars on an area 1 (fig. 1) for example 25m x 22m corresponding to 550mq, is equipped with car supporting pallets 3, with the size 5m x 2m (10mq) and has three entrance/exit areas.
- the parking area can be divided into 55 spaces of 10mq each. Using 42 of such spaces for self-propelled pallets according to the invention 13 free spaces are free.
- Pallets 3 move, alone or in group, according to the coordinates broadcast by the processing unit 12.
- the parking can be arranged on more levels. For example, on three levels of which one underground, one at ground level and one elevated, appropriate slopes can be provided as well as hoists, ramps etc.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Warehouses Or Storage Devices (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Carriers, Traveling Bodies, And Overhead Traveling Cranes (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT1999SP000003A IT1313493B1 (it) | 1999-03-18 | 1999-03-18 | Posteggi automatizzati modulari di grande capienza realizzata a mezzodi carrelli autonomi a gestione elettronica per stoccaggio e prelievo |
| ITSP990003 | 1999-03-18 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1036898A2 EP1036898A2 (en) | 2000-09-20 |
| EP1036898A3 EP1036898A3 (en) | 2001-09-19 |
| EP1036898B1 true EP1036898B1 (en) | 2006-05-31 |
Family
ID=11407911
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP00105821A Expired - Lifetime EP1036898B1 (en) | 1999-03-18 | 2000-03-20 | Automatic carrying and storing method of objects with selfpropelled pallets and pallet for automatic storage purposes |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP1036898B1 (it) |
| AT (1) | ATE328172T1 (it) |
| DE (1) | DE60028273D1 (it) |
| IT (1) | IT1313493B1 (it) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITPN20050062A1 (it) * | 2005-09-09 | 2007-03-10 | Viapark Europa S R L | Sistema di parcheggio automatizzato ad uno o piu' piani sovrapposti, con piattaforme mobili di sostegno e trasporto di autoveicoli in posizioni di parcheggio scelte preventivamente. |
| WO2009098600A2 (ru) * | 2008-02-04 | 2009-08-13 | Sergei Borisovich Lvov | Устройство для передвижения платформы-поддона автоматизированной системы парковки автомобиля |
| JP6964233B2 (ja) * | 2017-06-06 | 2021-11-10 | パナソニックIpマネジメント株式会社 | 台車ロボット |
| CN109854030B (zh) * | 2019-01-04 | 2020-06-26 | 尤好 | 一种智能停车库的存取系统 |
| JP7198185B2 (ja) * | 2019-09-24 | 2022-12-28 | 本田技研工業株式会社 | 車両管理システム、車両管理方法、及びプログラム |
| JP2023144286A (ja) * | 2022-03-28 | 2023-10-11 | 住友重機械搬送システム株式会社 | 機械式駐車場 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1336232A (fr) * | 1962-07-16 | 1963-08-30 | Chariot auto-propulsé pour le déplacement des véhicules dans les garages | |
| DE4241158C1 (de) * | 1992-12-07 | 1994-01-27 | Bayerische Park Und Lagersyste | Parkpalette |
-
1999
- 1999-03-18 IT IT1999SP000003A patent/IT1313493B1/it active
-
2000
- 2000-03-20 DE DE60028273T patent/DE60028273D1/de not_active Expired - Lifetime
- 2000-03-20 AT AT00105821T patent/ATE328172T1/de not_active IP Right Cessation
- 2000-03-20 EP EP00105821A patent/EP1036898B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1036898A3 (en) | 2001-09-19 |
| EP1036898A2 (en) | 2000-09-20 |
| DE60028273D1 (de) | 2006-07-06 |
| IT1313493B1 (it) | 2002-07-24 |
| ITSP990003A1 (it) | 2000-09-18 |
| ATE328172T1 (de) | 2006-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3842605B1 (en) | Intelligent parking lot and cluster transport robot thereof | |
| US20150139762A1 (en) | Hall effect sensor grid array guidance system | |
| CN106605033B (zh) | 用于车辆的自动停泊系统 | |
| FI97821C (fi) | Kuljetuslaite moottoriajoneuvojen kuljettamiseksi pysäköintirakennuksessa | |
| US9534410B2 (en) | Vehicle shuttle | |
| CN114314426B (zh) | 无人托盘搬运车及其工作方法 | |
| US20050207876A1 (en) | Method and system for automatically parking vehicles | |
| US20090078172A1 (en) | System and method for parking vehicles | |
| WO2015089163A1 (en) | Vehicle parking with automated guided vehicles and vehicle lifts | |
| CA3021233A1 (en) | Transporting system for transporting a container, and method for operating a production installation having a transporting system | |
| CN101519918B (zh) | 基于智能拖车的智能停车场 | |
| EP1036898B1 (en) | Automatic carrying and storing method of objects with selfpropelled pallets and pallet for automatic storage purposes | |
| CN106121317B (zh) | 一种基于道路上空的立体停车库 | |
| US20090081011A1 (en) | System and method for parking vehicles | |
| JP3436070B2 (ja) | 搬送設備 | |
| CN214087573U (zh) | 一种仓库搬运机器人 | |
| CN210825280U (zh) | 一种超薄举升全向agv | |
| CN216105849U (zh) | 一种无人托盘搬运车 | |
| CN108316724B (zh) | 一种立体停车库的停车入库方法 | |
| US5967727A (en) | Transport device for conveying motor vehicles in buildings | |
| CN107539738A (zh) | 一种分体协同式车辆转移设备 | |
| CN216109974U (zh) | 一种搬运车纵横位移系统 | |
| CN207245289U (zh) | 立体式车库 | |
| CN219034213U (zh) | 一种自动存取的立体停车场 | |
| CN111921920A (zh) | Agv搬运机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| AKX | Designation fees paid | ||
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| 17P | Request for examination filed |
Effective date: 20020701 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| 17Q | First examination report despatched |
Effective date: 20041028 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20060531 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 Ref country code: CH Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 Ref country code: LI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 60028273 Country of ref document: DE Date of ref document: 20060706 Kind code of ref document: P |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060831 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060901 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060911 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061031 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| EN | Fr: translation not filed | ||
| 26N | No opposition filed |
Effective date: 20070301 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070331 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070309 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060901 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070320 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060531 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20100324 Year of fee payment: 11 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20110320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110320 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20130927 Year of fee payment: 14 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140320 |