EP1323871A2 - "Abstützvorrichtung für Baumaschinen wie Hydraulikbagger und dergleichen" - Google Patents
"Abstützvorrichtung für Baumaschinen wie Hydraulikbagger und dergleichen" Download PDFInfo
- Publication number
- EP1323871A2 EP1323871A2 EP02028802A EP02028802A EP1323871A2 EP 1323871 A2 EP1323871 A2 EP 1323871A2 EP 02028802 A EP02028802 A EP 02028802A EP 02028802 A EP02028802 A EP 02028802A EP 1323871 A2 EP1323871 A2 EP 1323871A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- support
- outrigger
- support legs
- support device
- legs
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/085—Ground-engaging fitting for supporting the machines while working, e.g. outriggers, legs
Definitions
- the present invention relates to a supporting device for construction machines such as Hydraulic excavator and the like, with a Stauerfuß pivotally on a machine-side support piece, preferably the vehicle frame or the Chassis, is articulated, and a pivot drive for swinging out and in of the outrigger foot.
- a Stützfuß pivotally on a machine-side support piece, preferably the vehicle frame or the Chassis, is articulated, and a pivot drive for swinging out and in of the outrigger foot.
- the present invention is therefore based on the object, an improved Support device of the type mentioned, the disadvantages of Prevented prior art and the latter develops in an advantageous manner.
- a further increase in the achievable effective support base be achieved without collision problems in the retracted state of the supporting device to create.
- the support foot consists of several support legs, which are telescopically mounted to each other in the manner of a telescope, wherein the Support legs a locking device for locking the support legs in at least a position relative to each other, in particular in the extended Position, is assigned.
- the support legs are telescoped. On the other hand they are swung out. On the one hand this is in the extended state a wide cantilever and thus created a broad support base, on the other hand the support device in the retracted state in a compact, small-sized Configuration can be pushed together or panned so that collision problems z. B. minimized with the rotating superstructure and the like are.
- a pivot drive for swinging the outrigger is preferably a Pressure medium piston-cylinder unit provided, on the one hand to the support foot and on the other hand machine-side, preferably hinged to the support piece, on which also the support foot is pivotally mounted.
- the articulation of the piston-cylinder unit The outrigger can be attached to different support legs of the outrigger be provided.
- the piston-cylinder unit hinged to the first support leg, which is pivotable is mounted on the machine-side support piece, so that with small strokes the piston-cylinder unit a relatively large pivotal movement of the outrigger can be realized.
- the support foot can basically consist of different numbers of support legs. According to a preferred embodiment of the invention, two support legs provided, d. H. a first support leg pivotally hinged to the support piece and a second support leg telescoping on the second support leg is stored.
- the Locking device form-fitting acting and be designed to be manually operable.
- bores may be provided in the support legs, the at corresponding position of the support legs aligned with each other, so that a locking bolt in the aligned holes can be inserted and thus the Support legs are locked to each other in the respective austeleskop faced position.
- multiple pairs of holes may be used be provided with each other in different extended positions aligned.
- a telescopic drive for extending and retracting the support leg be provided relative to each other, preferably in the interior of the Support legs are arranged.
- this can be one Be spindle drive, which is optionally manually operated.
- the Teleskopierantrieb simultaneously forms the locking device, the the support legs fixed in the respective position.
- the spindle drive may be provided a self-locking threaded spindle.
- the locking device acts on the telescopic drive and thus only indirectly the support legs, so that with small locking forces only the telescopic drive needs to be kept and thus still a secure statement of Support legs can be achieved.
- the support legs of the Outriggers automatically telescoped when swinging the outrigger support.
- It can be a control device, preferably a mechanical positive control, be provided, which the extension position of the support legs to each other depending on the pivot position of the outrigger pretends.
- the telescopic drive is preferably operated by the rotary actuator or is coupled to this, so that automatically extend the support legs when the outrigger is swung out and vice versa.
- Such compulsory control ensures that when upwardly pivoting the support feet no collision with overlying Components of the construction machine is such.
- the Teleskopierantrieb consist of a linkage. It a slider-crank mechanism can be provided that in the manner of a two-bladed is constructed and operated by pivoting the outrigger.
- a first Transmission element may preferably in the interior of a first of the two support legs pivoted while a second transmission element, the is hingedly connected to the first transmission element, on the second of the two Support leg preferably also be hinged pivotally inside can.
- the two gear elements are pivoted to each other, moves the second support leg relative to the first or a. It is one of the two Gear elements designed as a driving crank.
- a pivot drive element can a machine fixedly arranged gear profile, in particular a on the Pivot axis of the support foot with the holding piece rotationally fixed gear, be provided.
- the first of the two transmission elements of the joint gear is provided with a corresponding gear profile around its pivot axis, so that it rolls on the machine side fixed gear profile when the outrigger is pivoted.
- the linkage is preferably designed such that it in the extended position of the support legs occupies a stretched position, d. H.
- the two articulated gear elements essentially define a straight. If necessary, they can also be slightly overstretched Take a position.
- a gear stop is provided which the Stretch position or the slightly overstretched position of the transmission elements defined. Versus this gear stop driving one or both of the gear elements, if they reach the stretched position.
- a spring device may be provided, which extends the linkage in its Position biased. It can also be provided that the acting as a crank Transmission element for forming the hinge connection with the other transmission element has a slot, so that it can be brought into an overstretched position is.
- the telescoping drive be operated independently of the pivotal position of the outrigger.
- a pressure medium piston-cylinder unit be provided, which is arranged inside the support legs can be.
- the support legs themselves as a piston-cylinder unit be formed, wherein one of the support legs as a piston rod and the other of the support legs acts as a cylinder.
- a separate trained piston-cylinder unit is a separate trained piston-cylinder unit, since here at a buckling load of the support legs no leakage problems and the like occur.
- control device for the actuation of the piston-cylinder unit to Einund Extending the support legs can end or proximity switch provided be that detect the pivoting position of the outrigger and an automatic Enable operation.
- a manual control device be to the pressure cylinder unit also in intermediate positions and thus to be able to use the support legs in intermediate positions. This will be it possible, any intermediate position and thus any length of the support foot to use.
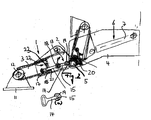
- the support foot 1 shown in Figure 1 consists of two support legs 2 and 3, the are telescopically in the manner of a telescope.
- the first support leg 2 is with its one end pivotable about a horizontal axis on the machine side Supporting piece 4 pivotally mounted.
- the pivotal connection can by a implemented by the support piece 4 and the support leg 2 passing bolt be, which defines the pivot axis 5 of the outrigger 1.
- the support foot 1 is pivotable between two positions, namely between a substantially vertically upward rest position and an obliquely outwardly and downwardly facing support position, in the support foot includes an acute angle to the horizontal, 45 degrees or less.
- a hydraulic actuator 6 for pivoting the support foot 1 is a hydraulic actuator 6 as a pivot drive 7 is provided, with its piston rod to the first support leg. 2 hinged and is hinged with its cylinder on the support piece 4.
- the linkage- or pivot axes of the hydraulic cylinder 7 are parallel to the pivot axis 5 of the outrigger 1.
- the arrangement of the hydraulic cylinder 7 is shown in FIG 1 made such that the orientation of its longitudinal axis in the swung Position of the outrigger 1 approximately parallel to the longitudinal axis of the outrigger is, in the raised position of the outrigger 1 is the hydraulic cylinder 7 with its longitudinal axis - roughly speaking - approximately perpendicular to the support foot. 1
- the support legs 2 and 3 manually telescoping and telescoping.
- a locking device is a detachable connection, z. B. plug pin connection provided.
- a first bore or a first alignment of the hole pair is provided in the first support leg 2 .
- a first bore or a first alignment of the hole pair is provided in the second support leg 3 .
- second holes 9 are several, in the longitudinal direction of the support leg spaced second holes 9 provided in the corresponding position of the second support leg 3 with the first holes 8 are aligned.
- a locking pin 10 can be pushed through the aligned hole pairs to the support legs 2 and 3 lock together.
- a riot plate 11 pivoted about a pivot axis 12 pivotally.
- the mentioned pivot axis 12 is parallel to the pivot axis 5 of the outrigger 1.
- the support foot 1 shown in Figure 2 basically has the same structure as the outrigger of the previously described embodiment.
- the embodiment according to FIG 2 differs from the previous one by a telescopic drive, the the support legs 2 and 3 when swinging out and pivoting of the support foot 1 automatically off and a telescope.
- the telescopic drive 13 is designed as a linkage, the in the support foot 1 is integrated, d. H. arranged inside the support legs 2 and 3 is.
- a first coupling member 14 is pivotally mounted on the first support leg 2 hinged, namely about a pivot axis 5 of the outrigger 1 parallel Anlenkachse 15, which are in the immediate vicinity of said Swivel axis 5 of the outrigger 1 is located (see Figure 2).
- a second coupling member 16 is hinged to the second support leg 3 pivotally, to a to the pivot axis 5 of the outrigger 1 also parallel pivot axis 17.
- the two coupling members 14 and 16 are directly connected by a Joint 18 connected. They form a planar linkage.
- To the pivot axis 15 has around the coupling member 14 has a toothing 19, which in a toothing 20, in particular a gear engages the stationary, d. H. rotatably provided with the support piece 4 is.
- Figure 2 shows, as fixed teeth 20 a on the Swivel axis 5 of the outrigger 1 seated gear provided.
- the first coupling member 14 is pivoted as soon as the Outrigger 1 is pivoted overall. This shortens the distance between the two pivot axes 15 and 17 of the two coupling members 14 and 16th
- the arrangement of the two coupling members 14 and 16 is made such that in the downwardly pivoted position of the support foot 1, the two coupling members 14 and 16 assume an extended position and essentially a Just define. In the upwardly pivoted position of the support foot. 1 the two coupling members 14 and 16 are pivoted together.
- the gear ratio the two gears 19 and 20 is made in such a way that in the upwardly pivoted position of the outrigger 1, the two coupling members 14 and 16 preferably occupy an acute angle to each other. This allows a further extension of the support legs 2 and 3 with short coupling links be achieved. The achievable thrust stroke of the linkage is exploited as much as possible.
- Securing the two support legs 2 and 3 in the extended position is effected by the stretched position of the coupling.
- the extended position of the paddock is doing defined by a gear stop 21 against one or both of the coupling links drive when the extended position is reached.
- a spring device 22 can bias the coupling in its extended position. As Figure 2 shows, a spring 23 of one of the two coupling members 14 or 16 to act on the gear stop 21 out.
- the coupling member acting as a crank Long hole has, with which it is pivotally connected to the other coupling member (see Figure 2a).
- the coupling element acting as a crank can be overstretched be, whereby a reliable position securing the support legs 2 and 3 in the extended state is reached.
- the alternative embodiment of the telescoping drive 13 shown in FIG also from a planar linkage with two coupling links 14 and 16th
- the structure of the transmission is largely identical to that of the previously described Execution match, so referenced.
- the telescopic drive 13 differentiates by the operation of the joint gear.
- the first coupling link 14 is not on a toothing with a load-bearing teeth in engagement, but on the first support leg 3 about the pivot axis 15 freely pivotable attached.
- To actuate the joint transmission is that of the two coupling links 14 and 16 formed coupling by an actuator 24 with an eccentric 25, which is non-rotatably connected to the hydraulic cylinder 7. As 3 shows, the eccentric 25 is attached to the end of the piston rod, with which the piston-cylinder unit is articulated on the first support leg 2.
- the actuator 24 articulated articulated. With its other end, the actuator 24 with the joint 18th connected, which connects the two coupling members 14 and 16.
- the arrangement is made such that the longitudinal axis of the hydraulic cylinder 7 and the straight line of the hinge point 26 and the pivot point of the Hydraulic cylinder 7 is defined on the support leg 2, approximately perpendicular to each other stand. In principle, however, other arrangements are possible. It depends on the fact that the pivot point 26 at a pivoting of the outrigger 1 relative to the support foot 1 changes its position.
- the actuator 24 could be used as a resilient pressure piece, in particular in the form of a piston-cylinder unit with inserted compression spring formed be. This could simply be a hyperextension of the eccentric piece 25 and the actuator 24 existing coupling can be achieved.
- the Training as a resilient pressure piece can also be achieved that of the two coupling links 14 and 16 formed coupling in an overstretched position, in which drives them against a stop, can be brought without that excessively accurate tolerances would be met.
- the actuator 24 is not connected to the Joint 18, but is connected to one of the two coupling members 14 and 16.
- it could be connected to a coupling member, which is a slot to form the hinge 18 with the other coupling member has, similar to the previously described embodiment.
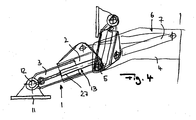
- the supporting foot 1 shown in FIG. 4 corresponds in its construction to that of the preceding one Versions.
- Differently formed is the telescopic drive 13th
- a hydraulic cylinder 27 is provided, which is inside the two support legs 2 and 3 is arranged.
- the telescopic drive 13 is therefore also in the here Interior of the outrigger integrated.
- the hydraulic cylinder 27 is on the one hand with the austeleskopierbaren support leg 3 and on the other hand with the firmly hinged Support leg 2 connected. This is a one-and-off telescoping of the support legs 2 and 3 regardless of the pivotal position of the outrigger 1 possible.
- About not shown end or proximity switch is an automatic Operation possible. Likewise, a collision monitoring via limit and proximity switches possible.
- the length of the outrigger 1 can be arbitrary be set.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
- Body Structure For Vehicles (AREA)
Abstract
Description
- Fig. 1:
- eine schematische Seitenansicht einer Abstützvorrichtung nach einer ersten bevorzugten Ausführung der Erfindung, bei der der Abstützfuß manuell teleskopierbar und verriegelbar ist,
- Fig. 2:
- eine schematische Seitenansicht einer Abstützvorrichtung nach einer weiteren bevorzugten Ausführung der Erfindung im Teilschnitt, bei der ein Gelenk- bzw. Koppelgetriebe zur automatischen, zwangsgesteuerten Teleskopierung des Abstützfußes vorgesehen ist, wobei der Abstützfuß in zwei Schwenkstellungen gezeigt ist,
- Fig. 3:
- eine schematische Seitenansicht einer Abstützvorrichtung nach einer weiteren bevorzugten Ausführung der Erfindung, bei der ähnlich der Ausführung nach Fig. 2 ein Koppel- bzw. Gelenkgetriebe zum Teleskopieren des Abstützfußes vorgesehen ist, und
- Fig. 4:
- eine Seitenansicht einer Abstützvorrichtung nach einer weiteren bevorzugten Ausführung der Erfindung, bei der ein Hydraulikzylinder zum Teleskopieren des Abstützfußes vorgesehen ist.
Claims (13)
- Abstützvorrichtung für Baumaschinen wie Hydraulikbagger und dergleichen, mit einem Abstützfuß (1), der schwenkbar an einem maschinenseitigen Tragstück (4), vorzugsweise einem Fahrzeugrahmen oder Chassis, angelenkt ist, und einem Schwenkantrieb (6) zum Aus- und Einschwenken des Abstützfußes (1), dadurch gekennzeichnet, dass der Abstützfuß (1) aus mehreren Stützschenkeln (2, 3) besteht, die nach Art eines Teleskops ausfahrbar aneinander befestigt sind, und eine Feststelleinrichtung (28) zum Feststellen der Stützschenkel (2, 3) in zumindest einer Stellung relativ zueinander vorgesehen ist.
- Abstützvorrichtung nach dem vorhergehenden Anspruch, wobei die Feststelleinrichtung (28) formschlüssig wirkend ausgebildet ist, vorzugsweise Ausnehmungen (8, 9) in den Stützschenkeln (2, 3), die bei entsprechender Stellung der Stützschenkel miteinander fluchten, sowie ein in die Ausnehmungen einschiebbares Riegelelement (10) besitzt.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche, wobei als Schwenkantrieb (6) eine Druckmittel-Kolbenzylindereinheit (7) vorgesehen ist, die einerseits an einem der Stützschenkel (2) und andererseits maschinenseitig, vorzugsweise an dem Tragstück (4), angelenkt ist.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche, wobei ein Teleskopierantrieb (13) zum Ein- und Ausfahren der Stützschenkel (2, 3) relativ zueinander vorgesehen ist, vorzugsweise im Inneren der Stützschenkel (2, 3) angeordnet ist.
- Abstützvorrichtung nach dem vorhergehenden Anspruch, wobei der Teleskopierantrieb (13) gleichzeitig die Feststelleinrichtung (28) bildet.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche, wobei eine Steuervorrichtung, vorzugsweise eine mechanische Zwangssteuerung, vorgesehen ist, die die Ausfahrstellung der Stützschenkel (2, 3) zueinander in Abhängigkeit der Schwenkstellung des Abstützfußes (1) steuert.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche, wobei der Teleskopierantrieb (13) aus einem Gelenkgetriebe besteht, das vorzugsweise ein erstes Getriebeelement (14), das an einem ersten der Stützschenkel (2) schwenkbar angelenkt ist, ein zweites Getriebeelement (16), das an einem zweiten der Stützschenkel (3) schwenkbar angelenkt und mit dem ersten Getriebeelement (14) gelenkig verbunden ist, sowie ein Schwenkantriebselement (19, 20; 24) aufweist, das mit einem der Getriebeelemente (14, 16) verbunden ist und dieses entsprechend einem Verschwenken des Abstützfußes (1) antreibt.
- Abstützvorrichtung nach dem vorhergehenden Anspruch, wobei das Gelenkgetriebe derart ausgebildet ist, dass es in der ausgefahrenen Stellung der Stützschenkel (2, 3) eine gestreckte Koppel bildet, wobei vorzugsweise ein die Strecklage oder eine leichte Überstrecklage definierender Getriebeanschlag (21) vorgesehen ist.
- Abstützvorrichtung nach einem der beiden vorhergehenden Ansprüche, wobei das Gelenkgetriebe als Schwenkantriebselement ein maschinenseitig fest angeordnetes Zahnradprofil (20) besitzt.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche 7 oder 8, wobei das Gelenkgetriebe als Schwenkantriebselement ein mit dem Schwenkantrieb (6) des Abstützfußes (1) drehfest verbundenes Exzenterstück (25) aufweist.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche, wobei der Teleskopierantrieb (13) aus einer Druckmittel-Kolbenzylindereinheit (27) besteht.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche, wobei der Abstützfuß (1) bei auf ebenem Untergrund stehender Baumaschine um eine horizontale Achse schwenkbar ist.
- Abstützvorrichtung nach einem der vorhergehenden Ansprüche, wobei am frei auskragenden Ende des Abstützfußes (1) eine Aufstandsplatte (11) mit vergrößerter Aufstandsfläche schwenkbar und/oder drehbar angelenkt ist.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE20120964U | 2001-12-27 | ||
| DE20120964U DE20120964U1 (de) | 2001-12-27 | 2001-12-27 | Abstützvorrichtung für Baumaschinen wie Hydraulikbagger u.dgl. |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1323871A2 true EP1323871A2 (de) | 2003-07-02 |
| EP1323871A3 EP1323871A3 (de) | 2003-07-09 |
| EP1323871B1 EP1323871B1 (de) | 2008-10-01 |
Family
ID=7965673
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20020028802 Expired - Lifetime EP1323871B1 (de) | 2001-12-27 | 2002-12-23 | "Abstützvorrichtung für Baumaschinen wie Hydraulikbagger und dergleichen" |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1323871B1 (de) |
| DE (2) | DE20120964U1 (de) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITMO20100032A1 (it) * | 2010-02-18 | 2011-08-19 | C M C Srl | Dispositivo stabilizzatore per macchina operatrice |
| RU2469798C2 (ru) * | 2011-03-03 | 2012-12-20 | Геннадий Леонидович Багич | Устройство принятия душа активируемой водой |
| US20130328295A1 (en) * | 2011-01-17 | 2013-12-12 | C.M.C.S.R.l Societa Unipersonale | Stabilizer device for an operating machine |
| WO2019158188A1 (en) | 2018-02-13 | 2019-08-22 | Volvo Construction Equipment Ab | A surface support assembly for supporting a working machine |
| CN115259037A (zh) * | 2022-07-29 | 2022-11-01 | 国网江苏省电力有限公司泰州供电分公司 | 自行走式履带桅杆垂直升降平台 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005007522A1 (de) * | 2005-02-17 | 2006-08-31 | Putzmeister Ag | Stützausleger für fahrbare Arbeitsmaschinen |
| DE102011102062A1 (de) * | 2011-05-19 | 2012-11-22 | Olaf Telesch | Ausleger für ein Lade- und Baggergerät |
| DE102012215534A1 (de) | 2012-08-31 | 2014-03-06 | Putzmeister Engineering Gmbh | Verriegelungsvorrichtung |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1236176A (en) * | 1969-06-12 | 1971-06-23 | Josef Kaiser | Improvements in or relating to a mobile appliance |
| US3801068A (en) * | 1972-12-22 | 1974-04-02 | Kogen Ind Inc | Automatic folding landing gear |
| US3981514A (en) * | 1973-10-15 | 1976-09-21 | Clark Equipment Company | Outrigger |
| JPS5447227A (en) * | 1977-09-19 | 1979-04-13 | Tadano Tekkosho:Kk | Outrigger |
| FR2600599A1 (fr) * | 1986-06-24 | 1987-12-31 | Guilhem Claire | Dispositif de stabilisation d'un engin |
| IT216971Z2 (it) * | 1989-03-10 | 1991-10-21 | Nardi Daniele | Martinetto di stabilizzazione e sollevamento |
| IT1289088B1 (it) * | 1996-03-13 | 1998-09-25 | Fki Fai Komatsu Ind Spa | Piede stabilizzatore a geometria variabile, in particolare per veicoli movimento terra. |
-
2001
- 2001-12-27 DE DE20120964U patent/DE20120964U1/de not_active Expired - Lifetime
-
2002
- 2002-12-23 EP EP20020028802 patent/EP1323871B1/de not_active Expired - Lifetime
- 2002-12-23 DE DE50212834T patent/DE50212834D1/de not_active Expired - Lifetime
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITMO20100032A1 (it) * | 2010-02-18 | 2011-08-19 | C M C Srl | Dispositivo stabilizzatore per macchina operatrice |
| WO2011101720A1 (en) * | 2010-02-18 | 2011-08-25 | C.M.C. S.R.L. - Società Unipersonale | A stabilizer device for an operating machine |
| US8657335B2 (en) | 2010-02-18 | 2014-02-25 | C.M.C. S.r.l.—Societa Unipersonale | Stabilizer device for an operating machine |
| US20130328295A1 (en) * | 2011-01-17 | 2013-12-12 | C.M.C.S.R.l Societa Unipersonale | Stabilizer device for an operating machine |
| RU2469798C2 (ru) * | 2011-03-03 | 2012-12-20 | Геннадий Леонидович Багич | Устройство принятия душа активируемой водой |
| WO2019158188A1 (en) | 2018-02-13 | 2019-08-22 | Volvo Construction Equipment Ab | A surface support assembly for supporting a working machine |
| CN115259037A (zh) * | 2022-07-29 | 2022-11-01 | 国网江苏省电力有限公司泰州供电分公司 | 自行走式履带桅杆垂直升降平台 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE20120964U1 (de) | 2003-06-12 |
| EP1323871B1 (de) | 2008-10-01 |
| DE50212834D1 (de) | 2008-11-13 |
| EP1323871A3 (de) | 2003-07-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE60207380T2 (de) | Leiterhalter für hochbaulieferwagen | |
| DE60127771T2 (de) | Brückenuntersichtvorrichtung mit Querverbindung zwischen Turm und Fahrzeugrahmen | |
| EP2146027A1 (de) | Bauarbeitsgerät mit schwenkbarem Mast | |
| EP0336088A1 (de) | Schwenkunterstützung eines den unteren Abschluss eines Klappverdecks bildenden Dachhauthaltebügels | |
| DE202025101845U1 (de) | Stabilisierungsstruktur mit Verbindungsstangen für Stehleiter | |
| DE3600430C2 (de) | ||
| EP1323871B1 (de) | "Abstützvorrichtung für Baumaschinen wie Hydraulikbagger und dergleichen" | |
| EP2248753B1 (de) | Kran mit Totpunktüberwindung | |
| DE60304403T2 (de) | Scherenhubvorrichtung | |
| DE68913526T2 (de) | Teleskop-stützvorrichtung. | |
| DE3600245A1 (de) | Geruest | |
| DE8703754U1 (de) | Umklappbare Parksperre | |
| DE2755986C2 (de) | Wippwerk für einen Kran | |
| CH665446A5 (de) | Saeule mit daran befestigten vorrichtungen. | |
| DE60310177T2 (de) | Gestell mit Gelenkvorrichtungen für Stützarme | |
| EP0970915A2 (de) | Kranausleger | |
| DE2924210C2 (de) | Hydraulisches Schildausbaugestell | |
| EP1231356B1 (de) | Leiter mit einem Niveauausgleich | |
| DE102004021314A1 (de) | Bügeltisch | |
| DE19947188C2 (de) | Ausziehtisch mit einem Tischgestell | |
| EP4290014B1 (de) | Gelenkkörper für eine klappbake und klappbake | |
| DE3107383C1 (de) | "Vorrichtung zum Verdichten von aus Verpackungsmaterial und leicht preßbaren Abfällen bestehendem Müll" | |
| EP0831054A2 (de) | Hubvorrichtung, insbesondere Scherenbühne | |
| DE10116245A1 (de) | Teleskopausleger für einen Fahrzeugkran | |
| DE4418687C2 (de) | Zusammenklappbarer Arbeitstisch, insbesondere Spanntisch |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR IE IT LI LU MC NL PT SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO |
|
| AK | Designated contracting states |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR IE IT LI LU MC NL PT SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO |
|
| 17P | Request for examination filed |
Effective date: 20031112 |
|
| AKX | Designation fees paid |
Designated state(s): DE ES FR IT NL |
|
| 17Q | First examination report despatched |
Effective date: 20071102 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE ES FR IT NL |
|
| REF | Corresponds to: |
Ref document number: 50212834 Country of ref document: DE Date of ref document: 20081113 Kind code of ref document: P |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090112 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20081001 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20081001 |
|
| 26N | No opposition filed |
Effective date: 20090702 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20171221 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20171229 Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 50212834 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190702 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181231 |