EP1466850A2 - Bogenanleger zum Vereinzeln von Bogen - Google Patents
Bogenanleger zum Vereinzeln von Bogen Download PDFInfo
- Publication number
- EP1466850A2 EP1466850A2 EP04007422A EP04007422A EP1466850A2 EP 1466850 A2 EP1466850 A2 EP 1466850A2 EP 04007422 A EP04007422 A EP 04007422A EP 04007422 A EP04007422 A EP 04007422A EP 1466850 A2 EP1466850 A2 EP 1466850A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- sheet
- transport
- suction
- separator
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/08—Separating articles from piles using pneumatic force
- B65H3/0808—Suction grippers
- B65H3/0816—Suction grippers separating from the top of pile
- B65H3/0825—Suction grippers separating from the top of pile and acting on the rear part of the articles relatively to the final separating direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/30—Orientation, displacement, position of the handled material
- B65H2301/33—Modifying, selecting, changing orientation
- B65H2301/331—Skewing, correcting skew, i.e. changing slightly orientation of material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/20—Location in space
- B65H2511/24—Irregularities, e.g. in orientation or skewness
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/50—Occurence
- B65H2511/51—Presence
- B65H2511/514—Particular portion of element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/50—Timing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/13—Parts concerned of the handled material
- B65H2701/131—Edges
- B65H2701/1311—Edges leading edge
Definitions
- the invention relates to a sheet feeder for separating sheets with a first and a second sheet separator, each of which holds a separating suction cup and a transport suction cup holder receiving a transport suction device and an associated one Have sheet separator height adjustment.
- a sheet separator and a sheet separator having a suction device are usually provided.
- the separating suction devices and the transport suction devices are driven with the aid of cam coupling gears.
- a cyclical movement between an upper and a lower latching position is impressed on a separating suction device holder receiving the separating suction devices.
- the top suction cup of a stack of sheets is picked up by the separating suction devices and separated into the upper rest position by the subsequent movement.
- the separated sheet is transferred to the transport suction devices, which preferably carry out a translatory movement and transport the separated sheet from the transport suction devices to the sheet processing machine arranged downstream of the sheet feeder.
- Blower nozzles are provided to implement sheet separation and sheet transport.
- a height adjustment device is assigned to the sheet separator.
- the transport suction carrier is pivotably arranged on a carriage which carries out a translatory movement by means of a vertical bearing.
- a roller lever acts on the bearing and is operatively connected to an adjustable guide rail.
- Such sheet feeder have the disadvantage that it is due to the rigid coupling of the Sheet separator is not possible to set the individual sheet separators independently. This is an adaptation to the processed material, to the shape of the sheet stack and a change in the position of the sheet with respect to the leading edge is not possible, so that these sheet feeders can only be used to a limited extent.
- the object of the invention is to change a generic sheet feeder so that with simple means a change in the position of the sheets with respect to their leading edge is possible and the effectiveness and universality of the downstream processing machine is increased.
- the object is achieved by a sheet feeder according to claim 1.
- the solution according to the invention makes it possible to use the sheet in the sheet feeder without one align the additional gearbox technology to the front edge and the sheet separator to be controlled individually and thus the sheet stacks to be processed adapt.
- Fig. 1 is a sheet feeder 1 with a sheet stack 2 consisting of sheets 3 and a downstream conveyor table 6 shown.
- the sheet stack 2 is on a stacking plate 11 positioned, which is arranged on lifting means 4.
- the lifting means 4 are operatively connected with a not shown, positioned in a frame 5 of the sheet feeder 1 Elevator.
- a first sheet separator 7 and a second sheet separator 8 are provided in the sheet feeder 1.
- Each sheet separator 7; 8 is provided with separating suction devices 9 and transport suction devices 10, which are connected to separating suction device supports 12 extending in the direction of the width of the sheets 3 and a common transport suction device support 13.
- the suction cups 12 are each connected to the output member of a cam coupling gear, not shown, which give the vacuum cups 12 and thus the suction cups 9 a cyclical movement between a lower detent position, in which the suction cups 9 rest on the sheet stack 2, and an upper detent position, which is approximately in Fig. 1 is shown.
- a first transport suction support 13.1 is assigned to the first sheet separator 7 and a second transport suction support 13.2 is assigned to the second sheet separator 8.
- the first transport suction support 13.1 is connected by means of a swivel joint 26 to the output member of a cam coupling gear, not shown, of the first sheet separator 7, and the second transport suction support 13.2 is connected to the output member of a cam coupling gear, not shown, of the second sheet separator 8 by means of a rotary push joint 27.
- first suction cup 13.1 can be pivoted about an axis perpendicular to the direction of transport 14 and the second suction cup 13.2 can be displaced transversely to the direction of transport 14 and can be pivoted about an axis perpendicular to the direction of transport 14.
- the transport suction support 13.1, 13.2 are rigidly connected to each other at their mutually facing ends and form the common transport suction support 13.
- the common transport suction support 13 and thus the transport suction 10 are cyclically moved in the transport direction 14 and in the opposite direction by the cam coupling gear, not shown.
- a first drive 15 driving this is assigned to the first sheet separator 7 and a second drive 16 driving this to the second sheet separator 8.
- a first scanning device 28 is provided on the first sheet separator 7 and a second scanning device 29 is provided on the second sheet separator 8.
- the first scanning device 28 detects the surface of the sheet stack 2 in the area of the first sheet separator 7, while the second scanning device 29 detects the surface of the sheet stack 2 in the area of the second sheet separator 8.
- the first sheet separator 7 is arranged on a first longitudinal guide 19 by means of first lifting elements 17 and the second sheet separator 8 is arranged on a second longitudinal guide 20 with the aid of second lifting elements 18.
- On the longitudinal guides 19; 20 are the lifting elements 17; 18 and thus the sheet separator 7; 8 in or against the direction of transport 14 synchronously, that is, each provided at the same time movable by the same path sections.
- the lifting elements 17; 18 are the lifting elements 17; 18 and thus the sheet separator 7; 8 in or against the direction of transport 14 synchronously, that is, each provided at the same time movable by the same path sections.
- the longitudinal guides 19; 20 designed as spindles into which the lifting elements 17; 18 intervene.
- the longitudinal guides 19; 20 are accommodated in bearings 21 which are firmly connected to a rear cross member 22.
- a first servomotor 24 and a second servomotor 25 are arranged on a front traverse 23, the first servomotor 24 being connected to the first longitudinal guide 19 and the second servomotor 25 being connected to the second longitudinal guide 20.
- the first drive 15 and the second drive 16 are connected to a control and regulating device 30, which is linked by means of a rotary angle sensor 31 to the processing machine arranged downstream of the sheet feeder 1.
- the first scanning device 28 is connected to the first lifting elements 17 via the control and regulating device 30 and the second scanning device 29 is connected to the second lifting elements 18 via the control and regulating device 30.
- An input device 32 is connected to the control and regulating device 30, through which the lifting elements 17; 18 can be influenced manually. In addition, it is possible to use the input device 32 to input processing-related parameters which can be stored in the control and regulating device 30 so that they can be called up to implement automated operation of the sheet feeder 1.
- the first drive 15 and the second drive 16 are controlled via the control and regulating device 30, including the signals generated by the rotary angle sensor 31, so that they rotate synchronously with one another and in the work cycle of the downstream processing machine.
- To implement synchronous operation of the drives 15; 16 it is e.g. B. possible to drive them according to the master-slave principle, one of the drives 15; 16 acts as a master and the other as a slave.
- the sheet separators 7, 8, and thus the cam coupling gear which controls the movement of the suction cups 12 and the movement of the transport suction cups 13.1, 13.2, are driven in synchronism by the drives 15, 16.
- the separating suction devices 9 assigned to the first sheet separator 7 and the separating suction devices 9 assigned to the second sheet separator 8 thus simultaneously place on the sheet stack 2 in their lower latching position, capture the uppermost sheet 3 in each case and lift it off the sheet stack 2 by moving into their uppermost latching position to be controlled.
- the separation process of the sheet 3 gripped by the suction pad 9 from the sheet stack 2 is supported in a known manner by blowers, not shown.
- the master-slave drive principle of the drives 15, 16 drives them synchronously, and thus the sheet 3 captured by the transport suction devices 10 is conveyed in the position in which it was taken over by the separating suction devices 9.
- the leading edge of the sheet 3 guided by the transport suction devices 10 runs parallel to the position in which the sheet 3 was separated by the separating suction devices 9 during transport.
- a leading edge scanning 33 is assigned to the belt table 6 or the feed table.
- the leading edge scan 33 detects the leading edge of the sheets 3 and supplies an actual value characterizing the position of the leading edge to the control and regulating device 30.
- the actual value is compared with a stored target value. If the actual value deviates from the target value, a control signal is generated and fed to the drive 15, 16 which is tracked as a slave.
- the first drive 15 was designed as a master, and the second drive 16 is tracked as a slave.
- the second drive 16 is thus supplied with the control signal and this is accelerated or decelerated in the transport direction 14 during the transport of the sheet 3 by the transport suction devices 10.
- the common transport suction support 13 is inclined to the extent that the front edge of the transported sheet 3 runs parallel to the contact line when the sheet 3 is transferred from the transport suction devices to the downstream belt table.
- the transport suction carrier 13 is returned in the opposite direction of transport 14 to take over the subsequent sheet 3 separated by the separating suction devices 9.
- the second drive 16 working as a slave is decelerated or accelerated in a departure from the first drive 15 working as a master in order to realize the original position of the transport suction carrier 13. If the second drive 16 has been accelerated during the transport of the sheet 3, in order to realize the original position of the transport suction carrier 13 when the following sheet 3 is taken over, the latter is decelerated during the movement against the transport direction 14.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
Abstract
Description
Um die Lage der Bogen im Bogenlager hinsichtlich ihrer Vorderkante verändern zu können, ist aus dem DE-Gbm 92 05 400 bekannt, den Transportsaugerträger um eine vertikale Achse zu verschwenken. Dazu ist der Transportsaugerträger an einem eine translatorische Bewegung ausführenden Schlitten mittels eines vertikalen Lagers schwenkbar angeordnet. Am Lager greift ein Rollenhebel an, der mit einer verstellbaren Führungsschiene in Wirkverbindung steht.
Diese Vorrichtung ist nur mit einem hohen Aufwand zu realisieren, wobei die zusätzlichen Massen bei großformatigen und schnelllaufenden Maschinen einen hohen Verschleiß bedingen sowie die Arbeitsorgane zu Schwingungen anregen, die die Zuführgenauigkeit nachteilig beeinflussen.
Bei großformatigen Bogenanlegern ist es bekannt, in der Formatbreite zwei Bogentrenner nebeneinander anzuordnen sowie die Antriebe dieser Bogentrenner mechanisch zu koppeln und als funktionelle Einheit zu betreiben, wobei eine Höhenstelleinrichtung vorgesehen ist, die, initiiert durch eine Stapelabtastung, das Höhenniveau dieser Einheit beeinflusst.
- Fig. 1:
- einen Bogenanleger in der Seitenansicht,
- Fig. 2:
- eine Draufsicht auf den Bogenanleger nach Figur 1,
- Fig. 3:
- eine Ansicht gem. Figur 2 mit einer Steuer- und Regeleinrichtung,
- Fig. 4:
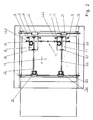
- eine Ansicht des Bogenanlegers gemäß Figur 1 von hinten.
Dem ersten Bogentrenner 7 ist ein diesen treibenden erster Antrieb 15 und dem zweiten Bogentrenner 8 ein diesen treibenden zweiter Antrieb 16 zugeordnet. Am ersten Bogentrenner 7 ist eine erste Abtasteinrichtung 28 und am zweiten Bogentrenner 8 eine zweite Abtasteinrichtung 29 vorgesehen. Die erste Abtasteinrichtung 28 erfasst die Oberfläche des Bogenstapels 2 im Bereich des ersten Bogentrenners 7, während mit der zweiten Abtasteinrichtung 29 die Oberfläche des Bogenstapels 2 im Bereich des zweiten Bogentrenners 8 erfasst wird.
Der erste Bogentrenner 7 ist mittels erster Hubelemente 17 an einer ersten Längsführung 19 und der zweite Bogentrenner 8 mit Hilfe von zweiten Hubelementen 18 an einer zweiten Längsführung 20 angeordnet. Auf den Längsführungen 19; 20 sind die Hubelemente 17; 18 und damit die Bogentrenner 7; 8 in oder entgegen der Transportrichtung 14 synchron, d. h. jeweils gleichzeitig um gleiche Wegabschnitte verbringbar vorgesehen. Dazu sind z. B. die Längsführungen 19; 20 als Spindeln ausgebildet, in die die Hubelemente 17; 18 eingreifen. Die Längsführungen 19; 20 sind in Lagern 21 aufgenommen, die fest mit einer hinteren Traverse 22 verbunden sind. An einer vorderen Traverse 23 sind ein erster Stellmotor 24 und ein zweiter Stellmotor 25 angeordnet, wobei der erste Stellmotor 24 mit der ersten Längsführung 19 und der zweite Stellmotor 25 mit der zweiten Längsführung 20 verbunden ist.
Der erste Antrieb 15 und der zweite Antrieb 16 sind mit einer Steuer- und Regeleinrichtung 30 verbunden, die mittels eines Drehwinkelgebers 31 mit der dem Bogenanleger 1 nachgeordneten Verarbeitungsmaschine verknüpft ist. Die erste Abtasteinrichtung 28 ist über die Steuer- und Regeleinrichtung 30 mit den ersten Hubelementen 17 und die zweite Abtasteinrichtung 29 über die Steuer- und Regeleinrichtung 30 mit den zweiten Hubelementen 18 verbunden. Mit der Steuer- und Regeleinrichtung 30 steht eine Eingabeeinrichtung 32 in Verbindung, durch die die Hubelemente 17; 18 manuell beeinflusst werden können.
Außerdem ist es möglich, mit Hilfe der Eingabeeinrichtung 32 bearbeitungstechnische Kenngrößen einzugeben, die in der Steuer- und Regeleinrichtung 30 zur Realisierung eines automatisierten Betriebs des Bogenanlegers 1 abrufbar gespeichert werden können.
Der erste Antrieb 15 und der zweite Antrieb 16 werden über die Steuer- und Regeleinrichtung 30 unter Einbeziehung der von dem Drehwinkelgeber 31 generierten Signale angesteuert, so dass diese synchron zueinander und im Arbeitstakt der nachgeordneten Verarbeitungsmaschine umlaufen. Zur Realisierung eines synchronen Betriebes der Antriebe 15; 16 ist es z. B. möglich, diese nach dem Master-Slave-Prinzip anzutreiben, wobei einer der Antriebe 15; 16 als Master und der andere als Slave wirkt. Durch die Antriebe 15,16 werden die Bogentrenner 7,8 und so die die Bewegung der Trennsaugerträger 12 sowie die die Bewegung der Transportsaugerträger 13.1, 13.2 steuernden Kurvenkoppelgetriebe im Gleichlauf angetrieben. Damit setzen die dem ersten Bogentrenner 7 zugeordneten Trennsauger 9 sowie die dem zweiten Bogentrenner 8 zugeordneten Trennsauger 9 gleichzeitig in ihrer unteren Rastposition auf den Bogenstapel 2 auf, erfassen den jeweils obersten Bogen 3 und heben diesen vom Bogenstapel 2 ab, indem sie in ihre oberste Rastposition gesteuert werden. Der Trennvorgang des durch Trennsauger 9 erfassten Bogens 3 vom Bogenstapel 2 wird in bekannter Weise von nicht dargestellten Bläsern unterstützt. Der vereinzelte und von den Trennsaugern 9 in seiner oberen Rastposition gehaltene Bogen 3 wird an die Transportsauger 10 übergeben und von diesen in Transportrichtung 14 gefördert. Durch das Master-Slave-Antriebsprinzip der Antriebe 15,16 werden diese synchron angetrieben und damit der von den Transportsaugern 10 erfasste Bogen 3 in der Lage gefördert, in der dieser von den Trennsaugern 9 übernommen wurde. D.h., die Vorderkante des von den Transportsaugern 10 geführten Bogens 3 verläuft während des Transports ständig parallel zu der Lage, in der der Bogen 3 von den Trennsaugern 9 vereinzelt wurde.
Da die Lage der Vorderkante eines von den Trennsaugern 9 vereinzelten Bogens 3 nicht unbedingt mit der Lage einer durch Vordermarken in einer Position an einem dem Bändertisch 6 nachgeordneten Anlegtisch gebildeten Anleglinie übereinstimmt, wird die Vorderkante des von dem Bändertisch 6 transportierten Bogens 3 erfasst. Dazu ist dem Bändertisch 6 oder dem Anlegtisch eine Vorderkantenabtastung 33 zugeordnet. Von der Vorderkantenabtastung 33 wird die Vorderkante der Bogen 3 erfasst und ein die Lage der Vorderkante charakterisierender Ist-Wert der Steuer- und Regeleinrichtung 30 zugeführt. In der Steuer- und Regeleinrichtung 30 wird der Ist-Wert mit einem abgelegten Soll-Wert verglichen. Bei Abweichungen des Ist-Wertes vom Soll-Wert wird ein Steuersignal generiert und dem als Slave nachgeführten Antrieb 15, 16 zugeführt. Im Ausführungsbeispiel Fig. 3 wurde der erste Antrieb 15 als Master ausgebildet, dem der zweite Antrieb 16 als Slave nachgeführt wird.
Damit wird dem zweiten Antrieb 16 das Steuersignal zugeführt und dieser während des Transportes des Bogens 3 durch die Transportsauger 10 in Transportrichtung 14 beschleunigt oder verzögert. Entsprechend wird der gemeinsame Transportsaugerträger 13 in dem Maß schräg gestellt, dass die Vorderkante des transportierten Bogens 3 parallel zur Anleglinie verläuft, wenn der Bogen 3 von den Transportsaugern an den nachgeordneten Bändertisch übergeben wird. Nach der Übergabe des gedrehten Bogens 3 wird der Transportsaugerträger 13 entgegen der Transportrichtung 14 zur Übernahme des nachfolgenden von den Trennsaugern 9 vereinzelten Bogens 3 zurückgeführt. Dabei wird der als Slave arbeitende zweite Antrieb 16 abweichend vom als Master arbeitenden ersten Antrieb 15 verzögert oder beschleunigt, um die ursprüngliche Lage des Transportsaugerträgers 13 zu realisieren. Wurde also der zweite Antrieb 16 während des Transports des Bogens 3 beschleunigt, wird, um die ursprüngliche Lage des Transportsaugerträgers 13 bei der Übernahme des nachfolgenden Bogens 3 zu realisieren, dieser bei der Bewegung entgegen der Transportrichtung 14 verzögert.
- 1
- Bogenanleger
- 2
- Bogenstapel
- 3
- Bogen
- 4
- Hubmittel
- 5
- Gestell
- 6
- Bändertisch
- 7
- erster Bogentrenner
- 8
- zweiter Bogentrenner
- 9
- Trennsauger
- 10
- Transportsauger
- 11
- Stapelplatte
- 12
- Trennsaugerträger
- 13
- gemeinsamer Transportsaugerträger
- 13.1
- erster Transportsaugerträger
- 13.2
- zweiter Transportsaugerträger
- 14
- Transportrichtung
- 15
- erster Antrieb
- 16
- zweiter Antrieb
- 17
- erstes Hubelement
- 18
- zweites Hubelement
- 19
- erste Längsführung
- 20
- zweite Längsführung
- 21
- Lager
- 22
- hintere Traverse
- 23
- vordere Traverse
- 24
- erster Stellmotor
- 25
- zweiter Stellmotor
- 26
- Drehgelenk
- 27
- Drehschubgelenk
- 28
- erste Abtasteinrichtung
- 29
- zweite Abtasteinrichtung
- 30
- Steuer- und Regeleinrichtung
- 31
- Drehwinkelgeber
- 32
- Eingabeeinrichtung
- 33
- Vorderkantenabtastung
Claims (7)
- Bogenanleger zum Vereinzeln von Bogen mit einem ersten und einem zweiten Bogentrenner, die jeweils einen Trennsauger aufnehmenden Trennsaugerträger und einen Transportsauger aufnehmenden Transportsaugerträger sowie eine zugeordnete Bogentrennerhöhenverstellung aufweisen, dadurch gekennzeichnet, dass dem ersten Bogentrenner (7) ein erster Antrieb (15) und dem zweiten Bogentrenner (8) ein zweiter Antrieb (16) zugeordnet ist und die Antriebe (15,16) durch eine Steuerund Regeleinrichtung (30) im Arbeitstakt der nachgeordneten Verarbeitungsmaschine antreibbar sind, wobei der Steuer- und Regeleinrichtung (30) eine die Vorderkante der zur Verarbeitungsmaschine geförderten Bogens (3) erfassende Vorderkantenabtastung (33) zugeordnet ist und bei Abweichungen der Ist-Lage von einer vorgegebenen Soll-Lage durch die Steuer- und Regeleinrichtung (30) ein einem der beiden Antriebe (15,16) während des Transports eines durch die an den Transportsaugerträgern (13.1; 13.2) angeordneten Transportsauger (10) gehaltenen Bogens (3) in einer Transportrichtung (14) vor- oder nacheilend treibendes Steuersignal zuführbar ist.
- Bogenanleger nach Anspruch 1, dadurch gekennzeichnet, dass der während des Transports des Bogens (3) in Transportrichtung (14) voreilend getriebene Antrieb (15,16) während der Bewegung der Transportsauger (10) entgegen der Transportrichtung (14) nacheilend treibbar ist.
- Bogenanleger nach Anspruch 1, dadurch gekennzeichnet, dass der während des Transports des Bogens (3) in Transportrichtung (14) nacheilend getriebene Antrieb (15, 16) während der Bewegung der Transportsauger (10) entgegen der Transportrichtung (14) voreilend treibbar ist.
- Bogenanleger nach Anspruch 1, dadurch gekennzeichnet, dass die Antriebe (15,16) nach dem Master-Slave-Prinzip steuerbar sind.
- Bogenanleger nach Anspruch 1 und 4, dadurch gekennzeichnet, dass der als Slave gesteuerte Antrieb (15, 16) vor- oder nacheilend treibbar ist.
- Bogenanleger nach Anspruch 1, dadurch gekennzeichnet, dass der dem ersten Bogentrenner (7) zugeordnete erste Transportsaugerträger (13.1) und der dem zweiten Bogentrenner (8) zugeordnete zweite Transportsaugerträger (13.2) als ein gemeinsamer Transportsaugerträger (13) ausgebildet sind.
- Bogenanleger nach Anspruch 1 und 6, dadurch gekennzeichnet, dass der gemeinsame Transportsaugerträger (13) mittels eines Drehgelenks (26) und eines Drehschubgelenks (27) den Bogentrennern (7,8) zugeordnet ist.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10316365 | 2003-04-10 | ||
| DE10316365A DE10316365A1 (de) | 2003-04-10 | 2003-04-10 | Bogenanleger zum Vereinzeln von Bogen |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1466850A2 true EP1466850A2 (de) | 2004-10-13 |
| EP1466850A3 EP1466850A3 (de) | 2008-01-02 |
| EP1466850B1 EP1466850B1 (de) | 2011-08-24 |
Family
ID=32864414
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP04007422A Expired - Lifetime EP1466850B1 (de) | 2003-04-10 | 2004-03-26 | Bogenanleger zum Vereinzeln von Bogen |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1466850B1 (de) |
| DE (1) | DE10316365A1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118495207A (zh) * | 2023-02-16 | 2024-08-16 | 海德堡印刷机械股份公司 | 提升式抽吸器控制方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1177652B (de) * | 1956-04-07 | 1964-09-10 | Georg Spiess Dr Ing | Bogenanlegevorrichtung mit zwei gemeinsam um eine pendelnd bewegte Achse schwenkbaren Saugduesen |
| DE2163083C3 (de) * | 1971-12-18 | 1974-05-16 | Heidelberger Druckmaschinen Ag, 6900 Heidelberg | Saugkopf einer Bogenanlegevorrichtung für Druckmaschinen |
| DE3919787A1 (de) * | 1989-06-16 | 1991-01-03 | Mabeg Maschinenbau Gmbh Nachf | Verfahren zum einrichten eines mit einem neuen bogenstapel versehenen bogenanlegers |
| DE9205400U1 (de) * | 1992-04-21 | 1992-06-11 | KBA-Planeta AG, O-8122 Radebeul | Vorrichtung zum Ausrichten von Bogen |
| DE19511296C2 (de) * | 1995-03-28 | 1999-07-15 | Gremser Masch Franz | Vorrichtung zum Anheben und Abtransportieren flächiger Gegenstände |
| DE19601470B4 (de) * | 1996-01-17 | 2004-10-28 | Heidelberger Druckmaschinen Ag | Schleppsaugergetriebe, insbesondere Schleppsaugergetriebe für eine Vorrichtung zur Schrägbogenkorrektur |
| DE19620937B4 (de) * | 1996-05-24 | 2004-08-05 | Man Roland Druckmaschinen Ag | Bogenanleger |
| DE19755521A1 (de) * | 1997-12-13 | 1999-06-17 | Koenig & Bauer Ag | Bogentrenner |
| DE10151484B4 (de) * | 2001-10-18 | 2005-07-28 | Man Roland Druckmaschinen Ag | Bogenanleger |
-
2003
- 2003-04-10 DE DE10316365A patent/DE10316365A1/de not_active Withdrawn
-
2004
- 2004-03-26 EP EP04007422A patent/EP1466850B1/de not_active Expired - Lifetime
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118495207A (zh) * | 2023-02-16 | 2024-08-16 | 海德堡印刷机械股份公司 | 提升式抽吸器控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1466850A3 (de) | 2008-01-02 |
| EP1466850B1 (de) | 2011-08-24 |
| DE10316365A1 (de) | 2004-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2098465B1 (de) | Annahmestation einer Paketpalettiereinrichtung und Verfahren zum Übergeben von Paketen an einen Greifer mit einer solchen Annahmestation | |
| DE19758732B4 (de) | Vorrichtung zum Stapel von Büchern | |
| DE2547778C3 (de) | Bogenanleger | |
| EP2277811B1 (de) | Vorrichtung und Verfahren zur Steuerung einer Stapelhubvorrichtung | |
| EP0644139A1 (de) | Bogenanlegereinheit | |
| DE3910041A1 (de) | Bogenanleger zum zufuehren eines aus vereinzelten bogen bestehenden bogenstroms zu einer bogenverarbeitenden maschine | |
| CH692700A5 (de) | Zusammentragmaschine. | |
| EP1593626B1 (de) | Vorderkantenanleger | |
| EP1593625B1 (de) | Vorderkantenanleger | |
| DE10033490B4 (de) | Einrichtung zum seitlichen Ausrichten von Bogen | |
| EP1466848B1 (de) | Bogenanleger zum Vereinzeln von Bogen | |
| EP1466850A2 (de) | Bogenanleger zum Vereinzeln von Bogen | |
| EP1352862A2 (de) | Verfahren zum wahlweisen Zuführen von Bogen oder Vorlaufbogen | |
| DE10119139A1 (de) | Vorrichtung zum Transport von Bogen von einem Querschneider zu einer Bogen verarbeitenden Maschine | |
| EP1466849B1 (de) | Bogenanleger zum Vereinzeln von Bogen | |
| EP3957582A1 (de) | Vorrichtung und verfahren zum zuführen von flächenförmigen gütern zu einer bearbeitungseinheit | |
| DE10258416A1 (de) | Einrichtung zum Vereinzeln und Zuführen von Bogen | |
| DE102023135280B3 (de) | Verfahren zum Betreiben einer bogenverarbeitenden Maschine | |
| DE10310696A1 (de) | Bogenanleger | |
| EP3907163A1 (de) | Anleger für stapel flächiger medien | |
| DE4214232C1 (de) | Bogenanleger mit im bereich der stapelhinterkante angeordneten trennsaugern | |
| EP0922658B1 (de) | Bogentrenner | |
| DE10310697A1 (de) | Bogenanleger | |
| DE19720568C2 (de) | Einrichtung zum Zuführen von Bogen | |
| DE102023104999A1 (de) | Anleger einer bogenverarbeitenden Maschine und Verfahren zum Betreiben eines Anlegers einer bogenverarbeitenden Maschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK |
|
| 17P | Request for examination filed |
Effective date: 20080112 |
|
| AKX | Designation fees paid |
Designated state(s): DE FR GB |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502004012811 Country of ref document: DE Owner name: KOENIG & BAUER AG, DE Free format text: FORMER OWNER: KOENIG & BAUER AG, 97080 WUERZBURG, DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502004012811 Country of ref document: DE Effective date: 20111027 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20120525 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502004012811 Country of ref document: DE Effective date: 20120525 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20150318 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20150319 Year of fee payment: 12 Ref country code: GB Payment date: 20150319 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502004012811 Country of ref document: DE Owner name: KOENIG & BAUER AG, DE Free format text: FORMER OWNER: KOENIG & BAUER AKTIENGESELLSCHAFT, 97080 WUERZBURG, DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502004012811 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160326 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20161130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161001 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160331 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160326 |