EP1641704B1 - Dispositif de detection mobile fixe au moyen de charge d'un chariot elevateur a fourche - Google Patents
Dispositif de detection mobile fixe au moyen de charge d'un chariot elevateur a fourche Download PDFInfo
- Publication number
- EP1641704B1 EP1641704B1 EP04731005A EP04731005A EP1641704B1 EP 1641704 B1 EP1641704 B1 EP 1641704B1 EP 04731005 A EP04731005 A EP 04731005A EP 04731005 A EP04731005 A EP 04731005A EP 1641704 B1 EP1641704 B1 EP 1641704B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- load
- sensor
- load sensor
- forklift
- lifting fork
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 claims abstract description 15
- 238000012544 monitoring process Methods 0.000 claims abstract description 13
- 238000001514 detection method Methods 0.000 claims description 12
- 230000000007 visual effect Effects 0.000 claims description 3
- 238000003384 imaging method Methods 0.000 claims description 2
- 238000003032 molecular docking Methods 0.000 abstract description 8
- 230000007613 environmental effect Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
Definitions
- the invention relates to a method for operating a movable load sensor for the load detection and monitoring on a forklift, and a movable load sensor device on a forklift according to the preambles of claims 1 and 7.
- the EP 0800129 B1 shows an industrial truck, in particular a counterbalance forklift, which is optionally operated manually or automatically.
- the forklift is equipped with a control system which is in communication with the drive, the steering, the brake system and the movement control of the fork.
- a means is provided for entering and storing possible travel routes and a transport task.
- an odometry system and an image processing system with at least one navigation camera is used for the autonomous determination of the vehicle position in space, wherein the navigation camera is mounted on the opposite side of the fork in the upper region of the driver's roof.
- At least one other camera is for detecting the presence, position and orientation of a pallet. Whereby this camera is fork-side, motion-same to the fork, attached to the truck. The control of the fork and / or the vehicle takes place depending on the position, the orientation of the pallet and the transport task. In addition, a means is provided, whereby the vehicle is braked in the presence of obstacles.
- the patent application WO 94/05586 shows an apparatus and a method for controlling a container crane .
- the positions of points on an edge of the loading gear or a container received therein and a point of an edge located in a destination measured and converted into signals for controlling the crane drive.
- the sensors used here are customary 2D rangefinders which use a laser beam or a microwave beam as the measurement beam. By additionally swiveling the scanning plane of the 2D rangefinder, a surface scan is generated. For this reason, the sensor is movably received in the direction of the selected edge to be scanned.
- Such a 3D range image sensor supplies to the measured points in each case all three space coordinates.
- the forklift may be an automatic or semi-automatic forklift truck.
- the orientation of the load means by means of the device in a certain position relative to the load.
- the device comprises a camera, by means of which images of the load are scanned.
- a light source homogeneously illuminating the light source, which is mechanically connected to the camera, a clear image of the load consisting of shadows and reflections is detected opto-electronically by means of the camera.
- the camera and the light source are connected to the load means such that they are arranged to be movable together with the load means.
- a one-dimensional camera arrangement is sufficient; the second dimension is generated by the movement of the load means during scanning. So that the field of view of the camera is not covered by the load, the camera is located below the load medium. Only when lowering the load means on the ground, the camera is held by a mechanical stop and raised telescopically above the level of the load means, so as to prevent damage to the camera. However, when raising the camera above the level of the load means the field of view of the camera is at least partially obscured by structural parts of the load means, in particular a view of the load or the lifting fork is then no longer possible. In addition, the movement of the camera arranged light sources are at least partially hidden by structural parts of the load means, whereby a homogeneous illumination is then no longer possible.
- a transport vehicle is shown with a mast and a lifting fork.
- the lifting fork is connected via a load means with the mast and can be moved in the vertical direction along the mast up and down.
- a camera unit is arranged, which is used as a load sensor.
- the load sensor is movable within a fixed predetermined range in the vertical direction relative to the load means, wherein the fixed predetermined range a raised and a lowered position includes.
- the raised position is a parking position in which the load sensor is above the level of the lifting fork.
- the load sensor is below the level of the lifting fork.
- a forklift is shown with a sensor suitable for ambient detection, which detects the actual height adjustment of the lifting fork.
- the sensor is arranged here away from the mast of the forklift on the lifting fork. When moving the lifting fork, the sensor moves in the vertical direction together with the lifting fork relative to the mast of the forklift.
- the sensor is arranged to be movable in the vertical direction relative to the lifting fork. The image information captured by the sensor is presented to the driver on an image display.
- the invention is therefore based on the object to provide a movable load sensor device on the load means of a forklift and a method for operating the load sensor according to the preambles of claims 1 and 7, which makes it possible the load means of the forklift taking into account dynamic environmental changes with high accuracy to be positioned.
- a movable load sensor is used for load detection and monitoring on a forklift.
- the load sensor is mounted and aligned on the forklift in such a way that the load and / or the lifting fork and / or the surroundings ahead of the forklift can be detected.
- the sensor data detected by means of the load sensor are then evaluated by means of a computer unit.
- the load sensor is in this case mounted to move with the load means with respect to the mast movable on the forklift.
- the load sensor can additionally be moved relative to the load means.
- the load sensor for example, if the field of view of the camera is obscured by structural parts of the forklift, be moved within a fixed predetermined range with respect to the load means.
- the position and orientation of the load can also be checked during transport by the movability of the load sensor relative to the load means.
- a linear drive may be provided on the load means for moving the load sensor.
- the invention first makes it possible to take into account dynamic changes in the environment of the forklift during the docking process. For example, a load parked by a worker, unlike automatically positioned loads, is not always exactly at the same position. It can also happen, for example, that a load is accidentally moved during a docking operation by the load means of the forklift itself.
- the targeted application of the load sensor allows the load to be precisely recorded at all times, even under difficult lighting conditions in industrial environments, and the load can then be positioned with high accuracy to suit dynamic changes in the environment.
- the load means is usually raised while driving.
- the load sensor is thereby moved in the vertical direction into a position below the level of the lifting fork.
- the detected environment information can then be used, for example, for path planning or further processing in the context of an obstacle detection, in order, e.g. Avoid collisions.
- the load means is also in the raised state, but the load sensor is advantageously moved in a vertical direction into a position above the level of the lifting fork.
- the load can be accurately detected with respect to its position and orientation by means of the load sensor even while driving in order to be able to detect a slippage of the load in good time.
- Slippage of the load can also be detected with the load sensor, if this is below the level of the lifting fork.
- e.g. advantageously detects a slippage of the load relative to the lifting fork.
- the load sensor in the horizontal direction in a position left or right next to the lifting fork is movable.
- the load sensor When transporting a load with the forklift, it is possible to look past the load with the load sensor laterally. For example, thus the lateral distance between load and track boundary can be better detected.
- a look on the side next to the lifting fork is a great advantage.
- a lateral method of the load sensor may be advantageous, for example, a load may be sampled from a suitable view prior to docking.
- the load sensor can additionally be tilted in the vertical direction and / or pivoted in the horizontal direction in order to fully exploit the possibility of different views can.
- the load sensor it is also conceivable to combine a plurality of different sensors as a movable load sensor and if necessary to carry out a sensor data fusion.
- the environmental information acquired by means of different sensors can be compared with the information from the odometry system of the forklift.
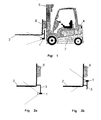
- the movable load sensor (1) is shown on a forklift (7).
- the load sensor (1) is connected together with the relative to the mast (5) movable load means (6).
- the load sensor (1) in this case within a predetermined range in addition to the lifting fork (2) is movable.
- the environmental information acquired by the load sensor may then be used be evaluated by the computer unit (4).
- the computer unit (4) can also be provided for controlling the forklift and the sensor system.
- the Fig. 2a shows an example of a detailed view of the load sensor (1), which is connected to the load means (6) and moved together.
- the load sensor (1) is here moved by means of the linear drive (3) relative to the lifting fork (2) within a predetermined range.
- the load sensor (1) is below the level of the lifting fork (2).
- This variant is particularly suitable for operation of the forklift with lifted load means (6).
- Fig. 2b a detail view of the load sensor (1) is shown, in which the load sensor (1) is above the level of the lifting fork (2).
- the mechanism for the linear drive (3) is also above the level of the lifting fork (2). This makes it possible for the lifting fork (2) to be placed completely on the ground without damaging the linear drive (3) or the load sensor (1).
- a forklift (7) is shown with the device according to the invention.
- the forklift (7) is just on the approach to receiving a load (8).
- the load means (6) is still in the raised state before docking.
- the load sensor (1) is therefore preferably below the level of the lifting fork (2).
- a pan-tilt head (9) is provided, with which the load sensor (1) can be pivoted and tilted and thus different views can be realized.
- the load sensor (1) is in this case aligned such that both the travel path (10) and the load (8) are detected.
- the load means (6) for receiving the load (8) is lowered.
- the load sensor (1) by means of the linear drive (3) above the level of the lifting fork (2) is raised.
- the retraction of the lifting fork (2) into the pockets of the Euro pallet (11) can be detected accurately during the docking process even in difficult lighting conditions and deviations in the position can be corrected if necessary.
- Fig. 5 shows the transport of a load (8) with the forklift (7).
- the load sensor (1) is located below the lifting fork (2) in order to detect the travel path of the forklift, for example in the context of an obstacle detection. If the load sensor (1) is moved only slightly below the level of the lifting fork (2), at the same time, if necessary, a slipping of the load (8) relative to the lifting fork (2) can be determined.
- the load sensor (1) during the transport of a load (8) above the level of the lifting fork (2) is raised.
- the load (8) during transport with the forklift (7) can be accurately detected, while at the same time a part of the route and the lifting fork (2) can be observed.
- the load sensor (1) is additionally movable in the horizontal direction.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Warehouses Or Storage Devices (AREA)
Claims (12)
- Procédé permettant de faire fonctionner un capteur de charge (1) mobile pour la reconnaissance et la surveillance d'une charge et destiné à un chariot à fourche, ce capteur de charge (1) permettant de détecter la charge (3) et / ou la fourche élévatrice (2) et / ou l'environnement situé en face du chariot élévateur à fourche (7) et les données détectées par le capteur (1) sont ensuite évaluées à l'aide d'une unité de calcul (4), le capteur de charge (1) pouvant se déplacer par rapport au mât (5) du chariot élévateur à fourche (7) simultanément au moyen de charge (6) et le capteur de charge (1) pouvant se déplacer à la verticale à l'intérieur d'une zone prédéfinie par rapport au moyen de charge (6), caractérisé en ce que le capteur de charge (1) peut se déplacer horizontalement à gauche ou à droite à proximité de la fourche élévatrice (2).
- Procédé selon la revendication 1, caractérisé en ce que le capteur de charge (1) peut être incliné verticalement et / ou pivoté horizontalement.
- Procédé selon la revendication 1 ou 2, caractérisé en ce que le capteur de charge (1) peut se déplacer verticalement dans une position supérieure ou inférieure au niveau de la fourche élévatrice (2).
- Procédé selon l'une quelconque des revendications précédentes, caractérisé en ce que des informations d'éloignement sont utilisées pour la reconnaissance et la surveillance.
- Procédé selon l'une quelconque des revendications précédentes, caractérisé en ce que des informations visuelles sont utilisées pour la reconnaissance et la surveillance.
- Procédé selon l'une quelconque des revendications précédentes, caractérisé en ce que des informations acoustiques sont utilisées pour la reconnaissance et la surveillance.
- Dispositif détecteur de charge mobile (1) permettant la reconnaissance et la surveillance destiné à un chariot à fourche, le capteur de charge (1) étant orienté de manière telle qu'il détecte la charge (1) et / ou la fourche élévatrice (2) et / ou l'environnement situé en face du chariot élévateur à fourche, et il est prévu une unité de calcul (4) permettant d'évaluer les données détectées par le capteur de charge (1), le capteur de charge (1) étant disposé de telle sorte qu'il puisse se déplacer par rapport au mât (5) du chariot élévateur à fourche (7) simultanément au moyen de charge (6) et un moyen étant prévu avec lequel le capteur de charge (1) puisse se déplacer verticalement dans une zone prédéfinie par rapport au moyen de charge (6), caractérisé en ce qu'un moyen est prévu avec lequel le capteur de charge (1) peut en outre se déplacer horizontalement à gauche ou à droite à proximité de la fourche élévatrice (2).
- Procédé selon la revendication 1, caractérisé en ce que le capteur de charge (1) peut être incliné verticalement et / ou peut pivoter horizontalement.
- Dispositif détecteur selon la revendication 7 ou 8, caractérisé en ce qu'il est prévu un moyen avec lequel le capteur de charge (1) peut se déplacer verticalement dans une position supérieure ou inférieure au niveau de la fourche élévatrice (2).
- Dispositif détecteur selon l'une quelconque des revendications 7 à 9, caractérisé en ce que le capteur de charge (1) est au moins un dispositif de balayage laser.
- Dispositif détecteur selon l'une quelconque des revendications 7 à 10, caractérisé en ce que le capteur de charge (1) est au moins un capteur formant une image.
- Dispositif détecteur selon l'une quelconque des revendications 7 à 11, caractérisé en ce que le capteur de charge (1) est au moins un capteur à ultrasons.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10323641A DE10323641A1 (de) | 2003-05-26 | 2003-05-26 | Bewegliche Sensoreinrichtung am Lastmittel eines Gabelstaplers |
| PCT/EP2004/004715 WO2004103882A1 (fr) | 2003-05-26 | 2004-05-04 | Dispositif de detection mobile fixe au moyen de charge d'un chariot elevateur a fourche |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1641704A1 EP1641704A1 (fr) | 2006-04-05 |
| EP1641704B1 true EP1641704B1 (fr) | 2009-10-21 |
Family
ID=33461871
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP04731005A Expired - Lifetime EP1641704B1 (fr) | 2003-05-26 | 2004-05-04 | Dispositif de detection mobile fixe au moyen de charge d'un chariot elevateur a fourche |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20080011554A1 (fr) |
| EP (1) | EP1641704B1 (fr) |
| JP (1) | JP2006528122A (fr) |
| AT (1) | ATE446276T1 (fr) |
| DE (2) | DE10323641A1 (fr) |
| WO (1) | WO2004103882A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022206053B3 (de) | 2022-06-15 | 2023-07-27 | Zf Friedrichshafen Ag | Vorrichtung zur Hinderniserkennung an einem Fahrzeug mit Hubvorrichtung und Verfahren zum Betreiben einer solchen Vorrichtung |
Families Citing this family (79)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005016276A1 (de) * | 2005-04-08 | 2006-10-12 | Still Gmbh | Flurförderzeug mit einem vertikal beweglichen Gabelträger |
| DE102005043781A1 (de) * | 2005-09-14 | 2007-03-15 | Still Gmbh | Flurförderzeug mit einem im Bereich eines Hubgerüsts angeordneten Umgebungssensor |
| US20070213869A1 (en) * | 2006-02-08 | 2007-09-13 | Intermec Ip Corp. | Cargo transporter with automatic data collection devices |
| DE102006012205A1 (de) * | 2006-03-16 | 2007-09-20 | Still Gmbh | Flurförderzeug mit einem Hubmast |
| DE102006040197A1 (de) * | 2006-08-28 | 2008-03-06 | Jungheinrich Aktiengesellschaft | Steuersystem für Flurförderzeuge |
| US8970363B2 (en) * | 2006-09-14 | 2015-03-03 | Crown Equipment Corporation | Wrist/arm/hand mounted device for remotely controlling a materials handling vehicle |
| US20090184811A1 (en) * | 2008-01-23 | 2009-07-23 | Althoff Nicholas K | Methods and system for an impact avoidance system |
| DE102008008922B4 (de) | 2008-02-13 | 2023-07-06 | Still Gesellschaft Mit Beschränkter Haftung | Flurförderzeug mit Umgebungssensor |
| DE102008027695B4 (de) | 2008-04-20 | 2022-07-07 | Still Gesellschaft Mit Beschränkter Haftung | Verfahren für die Lagerungspositionsansteuerung bei Flurförderzeugen |
| BE1018160A3 (nl) * | 2008-05-26 | 2010-06-01 | Egemin Nv | Automatisch gestuurd voertuig en werkwijze voor het sturen daarbij toegepast. |
| DE102009004742A1 (de) * | 2009-01-15 | 2010-07-22 | Jungheinrich Ag | Gabelzinke für eine Lastgabel eines Flurförderzeugs |
| DE102009006175B4 (de) | 2009-01-26 | 2026-04-30 | Still Gesellschaft Mit Beschränkter Haftung | Flurförderzeug mit Beleuchtungseinrichtung und Verfahren zum Betrieb des Flurförderzeugs |
| US9440591B2 (en) * | 2009-05-13 | 2016-09-13 | Deere & Company | Enhanced visibility system |
| CA2779078C (fr) * | 2009-11-02 | 2015-04-07 | Master Lock Company Llc | Coffre-fort a mecanisme de verrouillage double |
| USD654654S1 (en) | 2009-11-02 | 2012-02-21 | Master Lock Company Llc | Safe |
| DE102010004719B4 (de) | 2010-01-15 | 2025-01-30 | Linde Material Handling Gmbh | Flurförderzeug, insbesondere Lagertechnikstapler |
| US8538577B2 (en) * | 2010-03-05 | 2013-09-17 | Crown Equipment Limited | Method and apparatus for sensing object load engagement, transportation and disengagement by automated vehicles |
| US9143843B2 (en) * | 2010-12-09 | 2015-09-22 | Sealed Air Corporation | Automated monitoring and control of safety in a production area |
| US7865286B1 (en) * | 2010-05-01 | 2011-01-04 | Hall Walter D | Lift truck safety system |
| EP2385013A1 (fr) * | 2010-05-03 | 2011-11-09 | Siemens Aktiengesellschaft | Chariot de manutention doté d'un dispositif destiné à la surveillance de la position d'un produit de transport chargé et procédé destiné à la surveillance de la position d'un produit de transport chargé d'un chariot de manutention |
| PL2385014T3 (pl) * | 2010-05-03 | 2013-08-30 | Siemens Ag | Pojazd do transportu poziomego z urządzeniem do identyfikowania załadowanego towaru transportowego oraz sposób identyfikowana załadowanego towaru transportowego dla pojazdu do transportu poziomego |
| JP5139487B2 (ja) * | 2010-09-03 | 2013-02-06 | 新明工業株式会社 | フォークリフトの安全装置 |
| US8220169B2 (en) | 2010-09-11 | 2012-07-17 | Lawrence Auttlee Goddard | Method and system for guiding a plurality of load bearing members of a forklift |
| DE102012103364A1 (de) * | 2011-08-23 | 2013-02-28 | Still Gmbh | Flurförderzeug mit Hubhöhenmessung |
| WO2013059151A1 (fr) | 2011-10-19 | 2013-04-25 | Crown Equipment Corporation | Sélection d'objets les uns sur les autres dans une rangée verticale correspondant à des palettes dans une scène d'image |
| JP5908333B2 (ja) * | 2012-04-27 | 2016-04-26 | 株式会社日立製作所 | フォークリフト |
| DE102014100833B3 (de) * | 2014-01-24 | 2015-03-19 | Terex Mhps Gmbh | Automatisch geführtes Container-Portalhubgerät mit bewegbarer Sensoranordnung |
| US9932213B2 (en) | 2014-09-15 | 2018-04-03 | Crown Equipment Corporation | Lift truck with optical load sensing structure |
| EP3000771B1 (fr) * | 2014-09-25 | 2017-11-22 | Toyota Material Handling Manufacturing Sweden AB | Chariot élévateur à fourche |
| EP3000773B1 (fr) * | 2014-09-25 | 2017-04-12 | Toyota Material Handling Manufacturing Sweden AB | Procédé pour chariot élévateur à fourche destiné à déterminer une position de chargement dans un ratelier de chargement |
| JP6469506B2 (ja) * | 2015-04-16 | 2019-02-13 | 株式会社豊田中央研究所 | フォークリフト |
| JP6542574B2 (ja) * | 2015-05-12 | 2019-07-10 | 株式会社豊田中央研究所 | フォークリフト |
| JPWO2016199366A1 (ja) * | 2015-06-11 | 2018-04-05 | パナソニックIpマネジメント株式会社 | 寸法測定装置および寸法測定方法 |
| US10202267B2 (en) | 2015-10-29 | 2019-02-12 | The Raymond Corporation | Systems and methods for sensing a load carried by a material handling vehicle |
| US10859998B2 (en) * | 2015-11-19 | 2020-12-08 | Vis Vires Ip, Llc | System, apparatus, and method for autonomous activation of an optical forklift alignment apparatus using sensors |
| US9990535B2 (en) | 2016-04-27 | 2018-06-05 | Crown Equipment Corporation | Pallet detection using units of physical length |
| CN105806563A (zh) * | 2016-05-17 | 2016-07-27 | 福建工程学院 | 石材矿山叉装车智能辅助作业装置及方法 |
| CN106044663B (zh) * | 2016-06-23 | 2018-12-18 | 福建工程学院 | 一种基于视觉技术的可测重石材矿山叉装车及其测重方法 |
| DE102016115033A1 (de) * | 2016-08-12 | 2018-02-15 | Universität Stuttgart | Fahrerlose Transportvorrichtung und Verfahren zur Navigation und Positionierung einer fahrerlosen Transportvorrichtung |
| WO2018052787A1 (fr) | 2016-09-13 | 2018-03-22 | Walmart Apollo, Llc | Système et procédés pour estimer la capacité de stockage et pour identifier des actions basées sur une détection par le son |
| US10070238B2 (en) | 2016-09-13 | 2018-09-04 | Walmart Apollo, Llc | System and methods for identifying an action of a forklift based on sound detection |
| DE102016119402A1 (de) * | 2016-10-12 | 2018-04-12 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einer 3D-Kamera |
| JP6451715B2 (ja) | 2016-10-14 | 2019-01-16 | 株式会社豊田自動織機 | フォークリフト |
| DE102016224766A1 (de) * | 2016-12-13 | 2018-06-14 | Robert Bosch Gmbh | Verfahren zur Kalibrierung von Sensoren an einer mobilen Plattform |
| US11142442B2 (en) | 2017-02-10 | 2021-10-12 | Arrow Acquisition, Llc | System and method for dynamically controlling the stability of an industrial vehicle |
| JP6880884B2 (ja) * | 2017-03-22 | 2021-06-02 | 日本電気株式会社 | 車載装置、荷役機、制御回路、制御方法、及びプログラム |
| JP6972599B2 (ja) * | 2017-03-22 | 2021-11-24 | 日本電気株式会社 | 車載装置、荷役機、制御回路、制御方法、及びプログラム |
| JP6724864B2 (ja) * | 2017-05-30 | 2020-07-15 | 株式会社豊田自動織機 | 荷役車両の前方確認装置 |
| FR3068025B1 (fr) * | 2017-06-27 | 2019-08-16 | Compagnie Generale Des Etablissements Michelin | Chariot elevateur comportant une butee de chargement |
| JP6606133B2 (ja) * | 2017-07-31 | 2019-11-13 | 本田技研工業株式会社 | 除雪機 |
| US10495733B2 (en) * | 2018-02-26 | 2019-12-03 | GM Global Technology Operations LLC | Extendable sensor mount |
| JP7210369B2 (ja) * | 2018-04-27 | 2023-01-23 | 新明和工業株式会社 | 作業車両 |
| US11041956B2 (en) * | 2018-05-24 | 2021-06-22 | Toyota Motor Engineering & Manufacturing North America, Inc. | Lidar module and portable lidar scanner unit |
| EP3918587A1 (fr) | 2019-02-01 | 2021-12-08 | Crown Equipment Corporation | Appairage d'un dispositif de télécommande à un véhicule |
| US11641121B2 (en) | 2019-02-01 | 2023-05-02 | Crown Equipment Corporation | On-board charging station for a remote control device |
| JP2020160914A (ja) * | 2019-03-27 | 2020-10-01 | 株式会社豊田自動織機 | 物体検出装置 |
| JP2020196604A (ja) * | 2019-06-05 | 2020-12-10 | 村田機械株式会社 | 無人搬送車 |
| DE102019118756A1 (de) * | 2019-07-11 | 2021-01-14 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einem Montageelement für einen Sensor und Verfahren zur Positionierung eines Sensors eines Flurförderzeugs |
| CN110877876B (zh) * | 2019-11-04 | 2021-06-15 | 浙江华睿科技有限公司 | 栈板位置自动识别叉车 |
| FR3103941B1 (fr) | 2019-11-29 | 2022-06-03 | Balyo | Procede de determination de la position relative d’un prehenseur |
| JP6884247B1 (ja) * | 2020-03-11 | 2021-06-09 | 三菱ロジスネクスト株式会社 | 無人フォークリフト |
| CN114060653A (zh) * | 2020-08-10 | 2022-02-18 | 中强光电股份有限公司 | 升降机构及其操作方法 |
| CA3186028A1 (fr) | 2020-08-11 | 2022-02-17 | Trisha M. Luthman | Dispositif de commande a distance |
| US12091303B2 (en) * | 2020-09-14 | 2024-09-17 | Lance A. Stacy | Motorized vehicles having sensors and methods of operating the same |
| JP7533270B2 (ja) * | 2021-02-17 | 2024-08-14 | 株式会社豊田自動織機 | フォークリフト、及び、フォークリフトの制御方法 |
| JP7251906B2 (ja) * | 2021-05-11 | 2023-04-04 | 三菱ロジスネクスト株式会社 | コンテナ運搬車 |
| DE102021121224A1 (de) | 2021-08-16 | 2023-02-16 | Jungheinrich Aktiengesellschaft | Lastteil für autonom geführtes Flurförderzeug |
| US12269722B2 (en) | 2021-08-17 | 2025-04-08 | Schiller Automatisierungstechnik Gmbh | Method for operating a means of transport |
| DE102021004184A1 (de) * | 2021-08-17 | 2023-02-23 | Schiller Automatisierungstechnik Gmbh | Verfahren zum Betreiben eines Fördermittels |
| US20230058101A1 (en) * | 2021-08-23 | 2023-02-23 | Brandon Michael West | Powered Industrial Truck (PIT) with Rear-Loading/Lifting Mechanism |
| JP7559707B2 (ja) * | 2021-08-24 | 2024-10-02 | 株式会社豊田自動織機 | フォークリフト |
| WO2023192315A1 (fr) * | 2022-03-28 | 2023-10-05 | Seegrid Corporation | Système de capteur à actionnement passif |
| JP2023176620A (ja) * | 2022-05-31 | 2023-12-13 | 株式会社小松製作所 | 荷役車両 |
| KR102838954B1 (ko) * | 2022-12-02 | 2025-07-28 | 현대무벡스 주식회사 | 캐리지 정위치 제어 방법 |
| US12405131B2 (en) | 2023-02-28 | 2025-09-02 | Caterpillar Inc. | Terrain verification system and method for pallet drop |
| US12565411B2 (en) * | 2023-03-23 | 2026-03-03 | Rapyuta Robotics Co., Ltd. | Forklift |
| DE102023207177A1 (de) * | 2023-07-27 | 2025-01-30 | Kamag Transporttechnik Gmbh & Co. Kg | Verfahren zur Vermeidung von Erkennungen einer Fahrbahn durch eine Personenschutzeinrichtung sowie fahrerloses Transportfahrzeug |
| IT202300018297A1 (it) * | 2023-09-06 | 2025-03-06 | Toyota Mat Handling Manufacturing Italy S P A | Carrello industriale con un controllo migliorato del movimento del dispositivo di sollevamento |
| FR3159963A1 (fr) * | 2024-03-08 | 2025-09-12 | Easymov Robotics | Dispositif de manutention d’au moins un objet |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE7804927L (sv) * | 1978-04-28 | 1979-10-29 | Volvo Ab | Anordning for att orientera exempelvis ett lyftdon i forhallande till en last |
| JPH0615971Y2 (ja) * | 1987-12-15 | 1994-04-27 | 株式会社豊田自動織機製作所 | フォークリフトの前方確認装置 |
| JPH04256106A (ja) * | 1991-02-08 | 1992-09-10 | Toyota Autom Loom Works Ltd | 障害物検出装置 |
| SG52219A1 (en) * | 1992-08-28 | 1998-09-28 | Johann Hipp | Apparatus and method for controlling a container crane |
| US5586620A (en) * | 1995-05-12 | 1996-12-24 | Crown Equipment Corporation | Remote viewing apparatus for fork lift trucks |
| DE19613386A1 (de) * | 1996-04-03 | 1997-10-09 | Fiat Om Carrelli Elevatori | Flurförderzeug, das wahlweise manuell oder automatisch betreibbar ausgebildet ist |
| JP3129259B2 (ja) * | 1997-10-31 | 2001-01-29 | 株式会社豊田自動織機製作所 | 産業車両における車軸揺動制御方法及び車軸揺動制御装置 |
| US6150938A (en) * | 1998-09-09 | 2000-11-21 | Sower; Forrest D. | Laser lighting assembly mounted on a forklift to project a light beam parallel to and in the same plane as a fork and utilized to accurately direct the fork into a fork receiving volume of a pallet, thereby avoiding any fork damage to a load on a pallet |
| US6600418B2 (en) * | 2000-12-12 | 2003-07-29 | 3M Innovative Properties Company | Object tracking and management system and method using radio-frequency identification tags |
| DE60235963D1 (de) * | 2001-02-16 | 2010-05-27 | Toyoda Automatic Loom Works | Kamerahebevorrichtung und lasthandhabungstragvorrichtung eines hubwagens und hubwagen |
| WO2003008325A1 (fr) * | 2001-07-17 | 2003-01-30 | Kabushiki Kaisha Toyota Jidoshokki | Vehicule industriel equipe d'un controleur de travaux de manipulation de materiaux |
-
2003
- 2003-05-26 DE DE10323641A patent/DE10323641A1/de not_active Withdrawn
-
2004
- 2004-05-04 EP EP04731005A patent/EP1641704B1/fr not_active Expired - Lifetime
- 2004-05-04 JP JP2006529734A patent/JP2006528122A/ja active Pending
- 2004-05-04 AT AT04731005T patent/ATE446276T1/de not_active IP Right Cessation
- 2004-05-04 DE DE502004010271T patent/DE502004010271D1/de not_active Expired - Lifetime
- 2004-05-04 US US10/555,365 patent/US20080011554A1/en not_active Abandoned
- 2004-05-04 WO PCT/EP2004/004715 patent/WO2004103882A1/fr not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022206053B3 (de) | 2022-06-15 | 2023-07-27 | Zf Friedrichshafen Ag | Vorrichtung zur Hinderniserkennung an einem Fahrzeug mit Hubvorrichtung und Verfahren zum Betreiben einer solchen Vorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080011554A1 (en) | 2008-01-17 |
| DE10323641A1 (de) | 2005-01-05 |
| JP2006528122A (ja) | 2006-12-14 |
| EP1641704A1 (fr) | 2006-04-05 |
| ATE446276T1 (de) | 2009-11-15 |
| WO2004103882A1 (fr) | 2004-12-02 |
| DE502004010271D1 (de) | 2009-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1641704B1 (fr) | Dispositif de detection mobile fixe au moyen de charge d'un chariot elevateur a fourche | |
| EP1834922B1 (fr) | Chariot de manutention doté d'un mât de levage | |
| EP3000762B1 (fr) | Procédé de détermination optique, automatique d'une position cible pour un palonnier de conteneur | |
| EP2574587B1 (fr) | Procédé de détermination d'une position cible pour un palonnier de conteneur et le palonnier de conteneur | |
| EP2851331B1 (fr) | Procédé de commande d'un chariot de manutention pour la préparation de commandes | |
| EP2468678B1 (fr) | Chariot de manutention équipé d'un capteur pour détecter l'environnement spatial et procédé de fonctionnement d'un tel chariot de manutention | |
| EP3587220B1 (fr) | Véhicule comprenant un système de manoeuvre | |
| DE10251910B4 (de) | Containerkran | |
| WO2016120044A1 (fr) | Mesure d'une dimension sur une surface | |
| EP3453672B1 (fr) | Procédé et dispositif de prévention de collision lors du fonctionnement d'un chariot de manutention | |
| DE102012108034A1 (de) | Steuerungsverfahren für Flurförderzeug sowie Flurförderzeug | |
| DE102008020170A1 (de) | Verfahren und Vorrichtung zur berührungslosen Erfassung der Position eines höhenbeweglichen Lastaufnahmemittels eines Flurförderzeugs | |
| EP3281077B1 (fr) | Détection d'orientation et de position pour un système de transport | |
| DE102012108028A1 (de) | Steuerverfahren für Lastabsetzung eines Flurförderzeugs sowie Flurförderzeug | |
| DE102020215149A1 (de) | Verfahren zum Betreiben eines Fahrzeugs in einem Regalgang in Abhängigkeit von einer Fahrweginformation | |
| DE102020122900A1 (de) | Gabelstapler und Verfahren zur Erfassung einer Stellung eines Transportbehälters | |
| DE10323643B4 (de) | Sensorsystem für ein autonomes Flurförderfahrzeug | |
| EP4448435B1 (fr) | Grue | |
| DE19916999A1 (de) | Verfahren zur Bestimmung der Lage eines Fahrzeuges | |
| DE102004041938A1 (de) | Stapelgerät, insbesondere Reachstacker, und Verfahren zum Greifen und Stapeln von Containern | |
| DE102005043781A1 (de) | Flurförderzeug mit einem im Bereich eines Hubgerüsts angeordneten Umgebungssensor | |
| DE102017220359A1 (de) | Flurförderzeug mit an heb- und senkbaren Lastaufnahmemitteln angeordneten Kameras | |
| DE10323642A1 (de) | Bildsensor für ein autonomes Flurförderfahrzeug mit großem Erfassungsbereich | |
| DE102013112016B4 (de) | Flurförderzeug mit einem Hubhöhenassistenzsystem | |
| DE102020122030A1 (de) | Intralogistisches System |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20051122 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: HORSTMANN, SVEN Inventor name: KUETTNER, LARS Inventor name: STOPP, ANDREAS Inventor name: BROESEL, RALF |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DAIMLERCHRYSLER AG |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: DAIMLER AG |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| RAP2 | Party data changed (patent owner data changed or rights of a patent transferred) |
Owner name: STOPP, ANDREAS |
|
| REF | Corresponds to: |
Ref document number: 502004010271 Country of ref document: DE Date of ref document: 20091203 Kind code of ref document: P |
|
| NLT2 | Nl: modifications (of names), taken from the european patent patent bulletin |
Owner name: STOPP, ANDREAS Effective date: 20091118 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: PATENTANWAELTE SCHAAD, BALASS, MENZL & PARTNER AG |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100201 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100222 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100121 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20100608 Year of fee payment: 7 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20100526 Year of fee payment: 7 |
|
| 26N | No opposition filed |
Effective date: 20100722 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100122 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20100525 Year of fee payment: 7 |
|
| BERE | Be: lapsed |
Owner name: DAIMLER A.G. Effective date: 20100531 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20100521 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100531 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20110504 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110531 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110531 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 446276 Country of ref document: AT Kind code of ref document: T Effective date: 20110504 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20120131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110504 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502004010271 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110531 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502004010271 Country of ref document: DE Owner name: GOETTING KG, DE Free format text: FORMER OWNER: STOPP, ANDREAS, DR. ING., 15366 NEUENHAGEN, DE Effective date: 20120326 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110504 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100504 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100422 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230531 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 502004010271 Country of ref document: DE |