EP1975114B2 - Compensation des oscillations sur un châssis de levage d'un chariot de manutention - Google Patents
Compensation des oscillations sur un châssis de levage d'un chariot de manutention Download PDFInfo
- Publication number
- EP1975114B2 EP1975114B2 EP08004305.2A EP08004305A EP1975114B2 EP 1975114 B2 EP1975114 B2 EP 1975114B2 EP 08004305 A EP08004305 A EP 08004305A EP 1975114 B2 EP1975114 B2 EP 1975114B2
- Authority
- EP
- European Patent Office
- Prior art keywords
- industrial truck
- lifting frame
- sensor
- truck according
- actuator element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07559—Stabilizing means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/08—Masts; Guides; Chains
Definitions
- the invention relates to an industrial truck, in particular a reach truck, with a lifting frame and an actuator for moving the lifting frame relative to a vehicle frame of the industrial truck.
- the invention relates to an industrial truck with at least one sensor for detecting elastic swinging of the mast, which is in operative connection with an electronic control device with which the actuator for moving the mast can be controlled.
- Industrial trucks of the type mentioned can be reach trucks, but also counterbalanced forklifts.
- the mast In the case of reach trucks, the mast can be moved horizontally relative to the vehicle frame in the main direction of travel of the industrial truck. This pushing movement is carried out by means of an actuator which generates the force required to move the mast.
- the actuator can for example be formed by a hydraulic cylinder or by an electromechanical actuator.
- the mast can be tilted relative to the vehicle frame.
- the tiltability of the mast is often provided in addition to the ability to move horizontally.
- the tilt axis of the mast is aligned at right angles to the main direction of travel of the mast. In counterbalanced forklifts, tiltability is usually the only possible movement of the mast relative to the vehicle frame.
- the actuator for tilting the mast can also be formed by a hydraulic cylinder or an electromechanical actuator.
- the present invention is based on the object of providing an industrial truck in which vibrations of the lifting frame are largely prevented.
- the invention can be used advantageously if the lifting frame can be moved in an essentially horizontal direction by means of the actuator.
- the actuator is part of the thrust device for the mast of a reach truck.
- the actuator is formed by a hydraulic cylinder and the electronic control device controls a valve connected upstream of the hydraulic cylinder.
- the usual drive arrangement for moving the mast can continue to be used. Only the valve upstream of the hydraulic cylinder has to be adapted to the increased requirements in terms of response time and response behavior.
- At least one sensor for detecting elastic oscillation of the lifting frame has at least one strain gauge.
- the strain gauge is attached to a non-extendable mast on the mast. It records the slight elastic changes in length of the stationary mast caused by the vibrations of the mast.
- the sensor which has a strain gauge, is preferably arranged above a horizontal axis about which the lifting frame can be tilted.
- At least one sensor for recognizing an elastic swing of the lifting frame can have at least one acceleration sensor or at least one gyroscope sensor.
- the acceleration sensor directly measures the acceleration caused by the oscillating movement of the free end of the mast.
- the gyroscope sensor measures the change in the absolute angular position of the free end of the mast that takes place during the oscillation movement.
- the sensor which has an acceleration sensor or a gyroscope sensor, is advantageously arranged on a vertically movable extension mast of the lifting frame. If the sensor is arranged at the top of the most extendable mast of the mast, the sensor is always at the top of the mast. The oscillation movement has the greatest deflection at this point and can therefore be best measured there.
- At least one sensor for detecting elastic oscillation of the lifting frame has at least one pressure or force sensor that detects the force acting on the actuator. This allows the lifting frame vibrations to be measured indirectly via the reaction force of the vibrations acting on the actuator. If the actuator is designed as a hydraulic cylinder, the pressure sensor can be used to detect the periodic pressure change of the hydraulic oil that occurs during the oscillation.
- the electronic control device is designed in such a way that the movement of the actuator, which counteracts the swinging of the lifting frame, is determined taking into account at least one operating parameter of the industrial truck.
- An operating parameter is formed from the current horizontal position and / or the current horizontal movement speed of the lifting frame.
- Another operating parameter is the current inclination and / or the current inclination speed of the mast.
- a third operating parameter can be formed from the current lifting height and / or from the current lifting or lowering speed of the lifting frame.
- Another operating parameter is finally formed by the weight of a load raised with the lifting frame.
- the operating parameters mentioned have a significant influence on the vibration behavior of the mast. They are therefore taken into account by the control device when determining the compensating movement.
- the current travel speed of the industrial truck and the current braking state of the industrial truck also come into consideration as operating parameters to be taken into account.
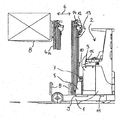
- the figure shows an industrial truck according to the invention designed as a reach truck.
- a vehicle frame 1 on which a driver's cab 2 is arranged can be seen.
- a battery block 3 which supplies all drives of the reach truck with electrical energy.
- a lifting frame 4 can be tilted on the vehicle frame 1 by means of a push carriage 5 and is mounted displaceably in the main direction of travel 6.
- the mast 4 is shown in the fully pushed back position.
- the fully advanced position 4a of the lifting frame 4 is also shown.
- the pushing movement of the lifting frame 4 is carried out by an actuator 9, which can be designed, for example, as a hydraulic cylinder or as an electromechanical unit.
- the mast Independently of the horizontal displacement of the mast 4, the mast can be tilted about the tilt axis 7.
- the horizontal tilt axis 7 is aligned perpendicular to the main direction of travel 6.
- the mast 4 can be extended telescopically upward in the usual manner.
- the mast 4 has a fixed mast attached to the push carriage 5 and therefore not height-movable, as well as one or more extending masts that can be extended upward relative to the standing mast.
- a load handling device designed as a load fork 8 is guided so that it can be moved up and down on the mast 4.
- a sensor 10 for detecting elastic swinging of the lifting frame 4 is attached to the stand mast of the lifting frame 4 above the pivot axis 7.
- the sensor 10 is designed as a strain gauge (DMS). Elastic deformations of the stationary mast are detected by the sensor 10.
- An electronic control device 15 evaluates the signal from the sensor 10 and reconstructs the bending state of the mast.
- a control algorithm is implemented in the control device, with which an active compensating movement is determined, with which the actuator 9 counteracts the oscillation.
- a sensor 14 which detects the movement of the upper end of the mast, is also arranged at the upper end of the extending mast.
- This sensor 14 can be based on the principle an acceleration sensor that measures the acceleration of the upper end of the mast, or on the principle of a gyroscope sensor that measures the angular position of the upper end of the mast.
- the computation of the compensation movement in the control device 15 can be based exclusively on the signal from the sensor 10, which reflects the mast bending, exclusively on the signal from the sensor 14, which reflects the movement of the upper end of the mast, or on the signals from both sensors 10 and 14.
- the control device 15 processes other signals.
- the compensation movement is thereby adapted to the current state of the lifting frame 4, which increases the effectiveness of the compensation movement.
- Most of the signals are the signal from a sensor 11 for the position of the push carriage 5, the signal from a sensor 12 for the height of the load fork 8 and the signal from a sensor 13 for the load weight.
- the current driving speed and the braking state can also be taken into account.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Forklifts And Lifting Vehicles (AREA)
Claims (17)
- Chariot de manutention, en particulier chariot élévateur à mât rétractable, avec un cadre de levage (4) et un organe de réglage (9) pour le déplacement du cadre de levage (4) par rapport à un châssis de véhicule (1) du chariot de manutention, dans lequel il est prévu au moins un capteur (10, 14) pour reconnaître une oscillation élastique du cadre de levage (4), qui est en liaison active avec un dispositif de commande électronique (15), avec lequel l'organe de réglage (9) peut être commandé pour le déplacement du cadre de levage (4),
caractérisé en ce que,
en présence d'une oscillation reconnue du cadre de levage (4), on s'oppose à l'oscillation du cadre de levage (4) par un mouvement de compensation actif et périodique de l'organe de réglage (9), et le mouvement d'oscillation est au moins approximativement arrêté. - Chariot de manutention selon la revendication 1,
caractérisé en ce que le cadre de levage (4) peut être déplacé dans une direction essentiellement horizontale au moyen de l'organe de réglage (9). - Chariot de manutention selon la revendication 1 ou 2, caractérisé en ce que le cadre de levage (4) peut être incliné autour d'un axe essentiellement horizontal (7) au moyen de l'organe de réglage.
- Chariot de manutention selon l'une quelconque des revendications 1 à 3, caractérisé en ce que l'organe de réglage (9) est formé par un cylindre hydraulique et le dispositif de commande électronique commande une soupape placée en amont du cylindre hydraulique.
- Chariot de manutention selon l'une quelconque des revendications 1 à 4, caractérisé en ce qu'au moins un capteur (10) destiné à reconnaître une oscillation élastique du cadre de levage (4) présente au moins une jauge extensométrique.
- Chariot de manutention selon la revendication 5, caractérisé en ce que le capteur (10) présentant une jauge extensométrique est disposé au-dessus d'un axe horizontal, autour duquel le cadre de levage (4) est inclinable.
- Chariot de manutention selon l'une quelconque des revendications 1 à 6, caractérisé en ce qu'au moins un capteur (14) destiné à reconnaître une oscillation élastique du cadre de levage (4) présente au moins un capteur d'accélération ou au moins un capteur gyroscopique.
- Chariot de manutention selon l'une quelconque des revendications 1 à 7, caractérisé en ce que le capteur (14) présentant un capteur d'accélération ou un capteur gyroscopique est disposé sur un mât extensible mobile en hauteur du cadre de levage (4).
- Chariot de manutention selon l'une quelconque des revendications 1 à 8, caractérisé en ce qu'au moins un capteur destiné à reconnaître une oscillation élastique du cadre de levage (4) présente au moins un capteur de pression ou de force, qui détecte la force agissant sur l'organe de réglage.
- Chariot de manutention selon l'une quelconque des revendications 1 à 9, caractérisé en ce que le dispositif de commande électronique (15) est configuré de telle manière que le mouvement de l'organe de réglage (9), qui s'oppose à l'oscillation du cadre de levage (4), soit déterminé en tenant compte d'au moins un paramètre de fonctionnement du chariot de manutention.
- Chariot de manutention selon la revendication 10, caractérisé en ce qu'un paramètre de fonctionnement est formé par la position horizontale instantanée et/ou la vitesse de déplacement horizontale instantanée du cadre de levage (4).
- Chariot de manutention selon la revendication 10 ou 11, caractérisé en ce qu'un paramètre de fonctionnement est formé par l'inclinaison instantanée et/ou la vitesse d'inclinaison instantanée du cadre de levage (4).
- Chariot de manutention selon l'une quelconque des revendications 10 à 12, caractérisé en ce qu'un paramètre de fonctionnement est formé par la hauteur de levage instantanée et/ou la vitesse de levage ou de descente instantanée du cadre de levage (4).
- Chariot de manutention selon l'une quelconque des revendications 10 à 13, caractérisé en ce qu'un paramètre de fonctionnement est formé par le poids d'une charge soulevée avec le cadre de levage (4).
- Chariot de manutention selon l'une quelconque des revendications 10 à 14, caractérisé en ce qu'un paramètre de fonctionnement est formé par la vitesse de roulage instantanée du chariot de manutention.
- Chariot de manutention selon l'une quelconque des revendications 10 à 15, caractérisé en ce qu'un paramètre de fonctionnement est formé par l'état de freinage instantané du chariot de manutention.
- Chariot de manutention selon l'une quelconque des revendications 10 à 16, caractérisé en ce qu'un algorithme de réglage est mis en œuvre dans le dispositif de commande électronique, avec lequel on détermine une grandeur de réglage pour le mouvement de l'organe de réglage (9).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007015488A DE102007015488A1 (de) | 2007-03-30 | 2007-03-30 | Schwingungskompensation am Hubgerüst eines Flurförderzeugs |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1975114A1 EP1975114A1 (fr) | 2008-10-01 |
| EP1975114B1 EP1975114B1 (fr) | 2015-07-29 |
| EP1975114B2 true EP1975114B2 (fr) | 2021-03-17 |
Family
ID=39639633
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08004305.2A Active EP1975114B2 (fr) | 2007-03-30 | 2008-03-07 | Compensation des oscillations sur un châssis de levage d'un chariot de manutention |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1975114B2 (fr) |
| DE (1) | DE102007015488A1 (fr) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009029467A1 (de) * | 2009-09-15 | 2011-03-24 | Robert Bosch Gmbh | Lastenfahrzeug mit höhenverstellbarer Hubeinrichtung |
| DE102010016062A1 (de) | 2010-03-22 | 2011-09-22 | Technische Universität München | Dämpfung oder Vermeidung von Schwingungen bei Flurförderzeugen |
| US9403667B2 (en) * | 2011-03-18 | 2016-08-02 | The Raymond Corporation | Dynamic vibration control systems and methods for industrial lift trucks |
| US8731785B2 (en) | 2011-03-18 | 2014-05-20 | The Raymond Corporation | Dynamic stability control systems and methods for industrial lift trucks |
| US8763990B2 (en) | 2012-03-20 | 2014-07-01 | The Raymond Corporation | Turn stability systems and methods for lift trucks |
| DE102013100191A1 (de) | 2013-01-10 | 2014-07-10 | Linde Material Handling Gmbh | Verfahren zur Erfassung von Hubvorrichtungsschwingungen |
| US9302893B2 (en) | 2013-02-07 | 2016-04-05 | The Raymond Corporation | Vibration control systems and methods for industrial lift trucks |
| US9002557B2 (en) | 2013-03-14 | 2015-04-07 | The Raymond Corporation | Systems and methods for maintaining an industrial lift truck within defined bounds |
| DE102013113428A1 (de) * | 2013-12-04 | 2015-06-11 | Kion Warehouse Systems Gmbh | Flurförderzeug |
| DE102014104745A1 (de) | 2014-04-03 | 2015-10-08 | Linde Material Handling Gmbh | Flurförderzeug mit Kompensation von Hubmastschwingungen |
| US10071894B2 (en) | 2015-08-03 | 2018-09-11 | The Raymond Corporation | Oscillation damping for a material handling vehicle |
| DE102016123541A1 (de) | 2016-12-06 | 2018-06-07 | Jungheinrich Aktiengesellschaft | Verfahren zur automatischen Ausrichtung eines Flurförderzeugs in einem Warenlager sowie System aus einem Flurförderzeug und einem Warenlager |
| DE102016124506A1 (de) | 2016-12-15 | 2018-06-21 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einer Steuereinheit zur Regelung der Bewegung einer Last sowie ein entsprechendes Verfahren |
| DE102016124505A1 (de) * | 2016-12-15 | 2018-06-21 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einer Steuereinheit zur Regelung der Bewegung einer Kolbenstange eines Hydraulikzylinders sowie ein solches Verfahren |
| DE102017103043A1 (de) | 2017-02-15 | 2018-08-16 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einem Hubgerüst |
| CN109279268A (zh) * | 2018-12-05 | 2019-01-29 | 大连英蕴科技有限公司 | 一种船舶内垂直升降机及方法 |
| JP7215948B2 (ja) * | 2019-03-28 | 2023-01-31 | 三菱重工業株式会社 | フォークリフト |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3210951C2 (de) † | 1982-03-25 | 1987-01-08 | Jungheinrich Unternehmensverwaltung Kg, 2000 Hamburg | Stapelfahrzeug mit Hubgerüst |
| DE10305902A1 (de) † | 2003-02-13 | 2004-09-02 | Jungheinrich Aktiengesellschaft | Verfahren zum Betrieb eines Schubmaststaplers und Schubmaststapler zur Durchführung des Verfahrens |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3122720C1 (de) | 1981-06-06 | 1983-01-13 | Jungheinrich Unternehmensverwaltung Kg, 2000 Hamburg | "Verfahren zur Bremsung eines Stapelfahrzeugs mit ausfahrbarem Lastträger und Hubgerüst und Stapelfahrzeug, insbesondere Hochregalstapler, zur Durchführung des Verfahrens" |
| EP0427001B1 (fr) * | 1989-11-10 | 1996-02-07 | Jungheinrich Aktiengesellschaft | Chariot élévateur avec un mât de levage disposé mobilement |
| DE4408757B4 (de) * | 1994-03-15 | 2007-02-15 | Crown Gabelstapler Gmbh & Co. Kg | Flurförderfahrzeug mit einem anhebbaren Lastträger |
| DE19641192C2 (de) | 1996-09-24 | 2002-10-31 | Siemens Ag | Handhabungsgerät, insbesondere Regalbediengerät |
| DE10054789A1 (de) | 2000-11-04 | 2002-05-08 | Still Wagner Gmbh & Co Kg | Flurförderzeug mit einem Hubgerüst und einer zusätzlichen Bewegungsvorrichtung für ein Lastaufnahmemittel |
| GB2379434B (en) * | 2001-09-10 | 2004-09-22 | Lansing Linde Ltd | Industrial truck with a lifting frame |
| DE10349123A1 (de) | 2003-10-22 | 2005-05-19 | Still Wagner Gmbh & Co Kg | Hubwerk, insbesondere für einen Hochregalstapler |
| DE102004048519A1 (de) | 2004-08-23 | 2006-03-02 | Sandt Logistik Gmbh | Antriebsregelung für ein Regalbediengerät |
| WO2008006928A1 (fr) | 2006-07-12 | 2008-01-17 | Rocla Oyj | Procédé et dispositif d'amortissement de vibrations dans une structure de mât |
-
2007
- 2007-03-30 DE DE102007015488A patent/DE102007015488A1/de not_active Withdrawn
-
2008
- 2008-03-07 EP EP08004305.2A patent/EP1975114B2/fr active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3210951C2 (de) † | 1982-03-25 | 1987-01-08 | Jungheinrich Unternehmensverwaltung Kg, 2000 Hamburg | Stapelfahrzeug mit Hubgerüst |
| DE10305902A1 (de) † | 2003-02-13 | 2004-09-02 | Jungheinrich Aktiengesellschaft | Verfahren zum Betrieb eines Schubmaststaplers und Schubmaststapler zur Durchführung des Verfahrens |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1975114A1 (fr) | 2008-10-01 |
| EP1975114B1 (fr) | 2015-07-29 |
| DE102007015488A1 (de) | 2008-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1975114B2 (fr) | Compensation des oscillations sur un châssis de levage d'un chariot de manutention | |
| DE102008020592B4 (de) | Verfahren zur Schwingungsdämpfung bei Flurförderzeugen | |
| EP2477930B1 (fr) | Véhicule de manutention à dispositif de levage réglable en hauteur | |
| EP3408208B1 (fr) | Grue et procédé de commande de ladite grue | |
| DE102008020595A1 (de) | Verfahren zur Schwingungsdämpfung bei Flurförderzeugen | |
| JP6951977B2 (ja) | 移動式作業機械およびその運転方法 | |
| EP2218835B1 (fr) | Chargeur à godet ayant deux châssis articulés. | |
| EP2520536B1 (fr) | Véhicule de levage | |
| DE102009041662A1 (de) | System zum Erfassen der Lastmasse einer an einem Hubseil eines Kranes hängenden Last | |
| DE102007024817B4 (de) | Flurförderzeug mit einem Hubgerüst und einem Stellglied zur Kompensation von Schwingungen | |
| EP2636637A1 (fr) | Dispositif de levage d'un chariot de manutention | |
| EP2881358B1 (fr) | Chariot de manutention | |
| EP4148192B1 (fr) | Machine hydraulique dotée d'une flèche pivotante autour d'un axe de pivotement | |
| EP1359113B2 (fr) | Chariot élévateur avec dispositif de déplacement du mât de levage | |
| EP2421791B1 (fr) | Machine de travail mobile présentant un accéléromètre | |
| DE102016106459A1 (de) | Arbeitsfahrzeug mit Knick-Gelenk-Lenkung und lastabhängiger Lenkwinkelbegrenzung | |
| EP1371603B1 (fr) | Procédé de contrôle d'au moins un mouvement d'un chariot de manutention | |
| EP1528035B1 (fr) | Dispositif de levage pour un chariot élévateur pour rayonnages hauts | |
| WO2010145733A1 (fr) | Engin de chantier mobile présentant un dispositif d'amortissement des oscillations d'un bras de travail et procédé pour amortir des oscillations | |
| EP3670428B1 (fr) | Procédé de détermination de chargement d'un chariot de manutention et chariot de manutention | |
| DE102006012982A1 (de) | Schubmaststapler mit einem Hubgerüst | |
| DE102005025536A1 (de) | Mobile Arbeitsmaschinen, insbesondere hydraulisch angetriebene Erdbaumaschinen, und Verfahren zur Erd- und Schüttgutbewegung | |
| DE102008020593A1 (de) | Verfahren zur Schwingungsdämpfung bei Flurförderzeugen | |
| EP3976889B1 (fr) | Mécanisme de levage hydrostatique, machine de travail mobile pourvue de celui-ci, et procédé permettant de déterminer une charge sur le mécanisme de levage | |
| DE202012002445U1 (de) | Flurförderzeug mit optional anwählbarer Ausstapelhilfsbetriebsart |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| 17P | Request for examination filed |
Effective date: 20090305 |
|
| 17Q | First examination report despatched |
Effective date: 20090424 |
|
| AKX | Designation fees paid |
Designated state(s): DE IT SE |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: STILL GMBH |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20150417 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE IT SE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502008013187 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502008013187 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: JUNGHEINRICH AKTIENGESELLSCHAFT Effective date: 20160429 |
|
| PLAF | Information modified related to communication of a notice of opposition and request to file observations + time limit |
Free format text: ORIGINAL CODE: EPIDOSCOBS2 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502008013187 Country of ref document: DE Representative=s name: PATENTSHIP PATENTANWALTSGESELLSCHAFT MBH, DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502008013187 Country of ref document: DE Representative=s name: PATENTSHIP PATENTANWALTSGESELLSCHAFT MBH, DE |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| R26 | Opposition filed (corrected) |
Opponent name: JUNGHEINRICH AKTIENGESELLSCHAFT Effective date: 20160429 |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| R26 | Opposition filed (corrected) |
Opponent name: JUNGHEINRICH AKTIENGESELLSCHAFT Effective date: 20160429 |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| APBU | Appeal procedure closed |
Free format text: ORIGINAL CODE: EPIDOSNNOA9O |
|
| PUAH | Patent maintained in amended form |
Free format text: ORIGINAL CODE: 0009272 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT MAINTAINED AS AMENDED |
|
| 27A | Patent maintained in amended form |
Effective date: 20210317 |
|
| AK | Designated contracting states |
Kind code of ref document: B2 Designated state(s): DE IT SE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R102 Ref document number: 502008013187 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: RPEO |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230518 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250331 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20260323 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20260320 Year of fee payment: 19 |