EP2285663B1 - System zum automatischen starten und zurückrufen einer unterwasserdrohne - Google Patents
System zum automatischen starten und zurückrufen einer unterwasserdrohne Download PDFInfo
- Publication number
- EP2285663B1 EP2285663B1 EP09757557A EP09757557A EP2285663B1 EP 2285663 B1 EP2285663 B1 EP 2285663B1 EP 09757557 A EP09757557 A EP 09757557A EP 09757557 A EP09757557 A EP 09757557A EP 2285663 B1 EP2285663 B1 EP 2285663B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- pod
- handling
- frame
- nacelle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/36—Arrangement of ship-based loading or unloading equipment for floating cargo
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/16—Arrangement of ship-based loading or unloading equipment for cargo or passengers of lifts or hoists
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/16—Arrangement of ship-based loading or unloading equipment for cargo or passengers of lifts or hoists
- B63B2027/165—Deployment or recovery of underwater vehicles using lifts or hoists
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
- B63G2008/005—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned remotely controlled
- B63G2008/007—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned remotely controlled by means of a physical link to a base, e.g. wire, cable or umbilical
Definitions
- the present invention relates to the general field of handling, loading and unloading objects from a transport platform. It relates more particularly to a handling nacelle for the launching and recovery of a submarine vehicle according to the preamble of claim 1, a method for launching a submarine vehicle according to the preamble of claim 8 and a method for recovering a submarine vehicle according to the preamble of claim 9.
- Such a pod is known from the document DE 41 40 201 which is considered the closest prior art.
- a crane-type lifting tool is generally available on board for various lifting operations. This lifting tool simply makes it possible to move the underwater vehicle on the platform, to deposit it on the surface of the water and to bring it back from the surface.
- the attachment of the vehicle to the crane and its stall are then performed manually by operators handling.
- a team positioned on the deck of the platform hooks the vehicle to the cable of the crane and a team positioned aboard a light craft, such as a watercraft, unhooks the vehicle while it floats. on the surface.
- a team positioned aboard a light craft proceeds to the attachment of the vehicle from the surface, while a team positioned on the deck of the platform performs the stall of the vehicle.
- This type of handling in addition to the fact that it mobilizes a large number of operators, also has the disadvantage that hooking and unhooking operations must be performed while the vehicle is on the surface and therefore undergoes the movement of waves.
- the launching and recovery of a vehicle in heavy weather is tricky. First of all, it requires that operators perform hooking and stall operations in heavy weather, from a light boat that is not suited to this type of weather. Then, it requires that the underwater vehicle is positioned on the surface near the platform while the movement of the waves makes the maintenance of a fixed position impossible.
- the launching and recovery of the submarine vehicle becomes perilous both at the human level by the danger it poses to the operators in charge of the handling, and the material plane by the risk. collision damage it causes to both the transport platform and the light craft and the submarine vehicle.
- the implementation of the underwater vehicle in all weather is generally carried out from a specialized platform, equipped with specific means closely adapted to the vehicle in question, allowing the attachment and automatic unhitching of the vehicle.
- An object of the invention is to propose a solution for implementing an underwater vehicle from a transport platform without requiring the intervention of handlers to proceed, from a light craft, the attachment of the vehicle the lifting means available to the platform and then to its stall.
- Another object of the invention is to provide a solution for operating these operations by limiting the risk of collision between the platform and the underwater vehicle when the latter is close to the platform.
- the means for adjusting the overall buoyancy comprise ballast floats arranged along the chassis.
- the means for ensuring the alignment of the frame on the underwater vehicle comprise a generally conical tip arranged at one end of the chassis, nozzle being sized and configured to receive the front end of the vehicle.
- the means for gripping the vehicle comprise two articulated arms arranged on the frame and configured to encircle the side walls of the vehicle.
- the subject of the invention is also a system for remote handling of an underwater vehicle, which comprises lifting means associated with a handling nacelle according to the invention, the gripping device being connected to the lifting means by a cable electrotractor wound on a winch.
- the handling system further comprises control and control means to guarantee the alignment of the chassis on the vehicle and actuate the various means of the nacelle, the control signals and control being transmitted by the electrotractor cable.
- control and control means comprise a camera mounted on the handling nacelle configured to view the underwater vehicle during approaching the nacelle handling and during chassis alignment operations on the vehicle.
- the device according to the invention advantageously allows a transport platform, a scientific vessel for example, to carry an underwater vehicle, a relatively small automatic vehicle, for example, and to automatically implement such a vehicle. even in rough seas, without the need for manual operations and without risking a collision between the platform and the vehicle.
- This implementation can also advantageously be performed with simple lifting means.
- the figure 1 presents a general view of the handling nacelle 10 according to the invention for housing the underwater vehicle during the launching and recovery maneuvers. It mainly comprises a central frame 11 forming a dorsal edge and a fastening zone 17 at which the nacelle is secured to a traction cable 18 for lifting the nacelle 10.
- the lashing of the cable 18 to the nacelle 10 is carried out, as illustrated by the figure 1 via an articulated attachment.
- the nacelle 10 can move freely without inflicting excessive torsion on the traction cable 18.
- the central frame 11 supports gripping means 14 distributed along it and configured to perform the capture and maintenance of the underwater vehicle.
- these means 14 comprise articulated arms which come to order encircle the wall of the vehicle following the profile of this wall.
- the gripping means may for example consist as illustrated in the figure in a plurality of rigid arm sets in arches of circles 15, 16, hinged at the frame, arranged in opposition to one with respect to the other and custom to lower to come to seize the vehicle or get up to release it.
- the arms constituting each set may consist of a plurality of articulated segments, the latter configuration allowing for example the seizure of a vehicle whose wall does not have a regular profile.
- the gripping means are actuated as soon as the vehicle the underwater vehicle has penetrated into the space 101 limited by the nacelle, it has positioned itself inside this space so as to to be in contact with the frame 11 and to be oriented so that its main axis is parallel to the axis 19 of the frame.
- the frame 11 also supports means 13 to allow automatic positioning of the vehicle within the space 101 limited by the nacelle, in particular its alignment with respect to the axis 19 of the frame.
- these means consist of a mechanical structure attached to the front of the chassis, defining a space 131 may accommodate the front end of the vehicle.
- the structure 13 has a flared opening allowing the front end of the vehicle to be housed in the housing space 131 even if the vehicle is not rigorously aligned with the axis 19 of the chassis when it enters the space 101 limited by the platform 10. It is arranged so that when the front end of the vehicle is fully engaged in the housing space 131, the frame 11 is positioned in contact with the wall of the housing. vehicle or at least a very small distance from it.
- the means 13 to allow automatic positioning of the vehicle inside the nacelle 10 are associated with complementary means to ensure that the correct positioning of the vehicle in the nacelle is achieved.
- These control means can take various forms, the form of devices with electrical contacts or optical devices for example.
- the chassis 11 still supports means 12 which ensures the nacelle 10 a variable buoyancy in the water.
- These means consist for example as shown in the figure in floats associated with ballasts configured and arranged on the structure so as to give it a horizontal position when it is immersed. So, by doing to vary the buoyancy of the floats it is possible to maintain the nacelle at a given depth and in a horizontal position.
- the gripping of the underwater vehicle can advantageously be performed without the need for it to surface. Therefore, the depth at which the gripping of the submarine is carried out can advantageously be chosen so that this operation takes place in calm waters.
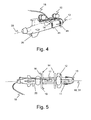
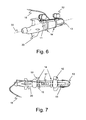
- FIGS. 2 to 7 present views illustrating at different times the operating principle of the handling platform 10 according to the invention during the recovery of a submarine vehicle 20 by a handling system comprising such a nacelle.
- FIGS 2 and 3 illustrate the phase of the operation during which both the chassis and the vehicle are brought into contact and the chassis is aligned with the vehicle.
- the vehicle 21 is in motion. It inserts its front end into the positioning means and causes in its movement symbolized by the arrows 21 and 31 the nacelle 10 whose gripping means 14 are in the raised position. Under the action of the movement printed by the vehicle and the inertia of the nacelle it takes a rotational movement in the horizontal plane and the vertical plane, a movement that has the effect of aligning the axis 19 of the frame 11 on the axis 33 of the vehicle and to bring the frame 11 of the vehicle wall.
- the arrows 22 and 32 symbolize these two movements printed by the training of the nacelle 10 by the vehicle 20. Consequently, at the end of this phase, the underwater vehicle 20 and the nacelle 10 are correctly positioned one relative to each other so that the gripping operation itself can begin. The vehicle 20 then exerts more propulsion.
- the Figures 4 and 5 illustrate the beginning of the actual grasping operation.
- the vehicle and the nacelle are correctly positioned relative to each other: the axes 19 and 33 are parallel and the frame 11 is in contact with the wall of the vehicle 20.
- the gripping means 14 are then actuated and the arms 15 and 16 rotate according to a movement symbolized by the arrows 41 to come into contact with the vehicle wall on each side of this wall.
- the vehicle-nacelle assembly can be reassembled on board the transport platform using lifting means not shown here, for example a crane, by winding the cable 19 on a winch located on board the platform.
- the nacelle 10 thus constitutes an element of a complete handling system including the nacelle 10, the towing cable 19, the lifting means and control and control means. These means have the function of enabling the various means provided by the nacelle 10 to be implemented.
- the control and control means make it possible, in particular, for an operator on board to manage the means 12 ensuring the variable buoyancy of the nacelle. manage the gripping means 14 and manage the control of the winch which actuates the unwinding and winding of the towing cable 19, actions that cause the descent and the ascent of the nacelle 10.
- control and control means may be preferably configured to allow the operator to ensure the correct positioning of the nacelle 10 and of the underwater vehicle 20 in particular before operating the gripping means 14 during the recovery operation of the vehicle.
- the nacelle 10 is equipped with complementary means configured to transmit to the control and control means information relating to the positioning of the vehicle in the nacelle.
- additional means may consist of video means, a camera attached to the rear of the frame 11 for example. They also make it possible to facilitate the operations of bringing the vehicle 20 closer to the nacelle 10, which can be brought about autonomously by the vehicle 20. or conducted from the transport platform by an operator, the vehicle being then remotely controlled from the platform for the nacelle association phase.
- FIGS. 8 to 10 illustrate how a handling system such as that described above and including a video camera on the platform 10 can be implemented to carry out the recovery and recovery of an automatic submarine vehicle.
- the figures show views of the underwater vehicle to be recovered for moments corresponding to different phases of the operation. These views obtained from a video camera positioned on the rear end of the frame 11 of the nacelle 10 are used by the operator to manage the necessary maneuvers. The procedure to launch the vehicle using the same handling system is also easily deduced from the way to proceed to recover it.
- the vehicle 20 comes for example, to position itself at the end of the mission in the vicinity of the pod 10 which awaits it at a given depth, chosen according to the calm nature of the waters at this depth, then goes into a mode of remote controlled operation.
- the operator aboard the platform obtains an image similar to that of the figure 8 .
- the operator then acts on the navigation and propulsion controls of the vehicle so as to guide it to the nacelle and to engage its front end in the positioning means 13.
- the operator on board the platform obtains a similar image to that of the figure 9 .
- the operator interrupts the propulsion system of the vehicle and actuates the gripping means 14, so as to lock the vehicle in Platform.
- the nacelle 10 is then reassembled on board the transport platform by controlling the winding of the traction cable 18 and positioned on its storage area by the lifting means.
- the exchanges of information and commands between the nacelle 10 and the control and control means are made, conventionally, via the cable 18 which connects the nacelle to the lifting means.
- this cable called “electrotractor cable” may comprise a plurality of strands intended to fulfill the traction function and one or more strands forming electrical conductors for driving the signals exchanged by the nacelle and the control means and control.
- it may comprise strands consisting of optical fibers.
- the exchanges of commands and information between the vehicle and the command and control means can be made by any appropriate means of communication.
- the communication means may for example be installed on the nacelle.
- a handling system such as that described above, is made advantageously simple by the use of the nacelle 10 according to the invention, which takes into account alone the greater part of the specificities of the vehicle 20 to launch and recover.
- the nacelle 10 constituting a real interface adaptation, it is not particularly useful to set up lifting means and specific traction.
- the procedures for launching and recovering a submarine vehicle are also simplified. They are also teleoperable to a large extent.
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Other Liquid Machine Or Engine Such As Wave Power Use (AREA)
- Underground Or Underwater Handling Of Building Materials (AREA)
Claims (9)
- Handhabungsrahmen (10) zum Zuwasserlassen und Zurückholen eines Unterwasserfahrzeugs (20), der ein Chassis (11) umfasst, das ein Rückgrat und eine Schnittstelle zwischen Hebemitteln und dem Unterwasserfahrzeug (20) bildet, dadurch gekennzeichnet, dass das Chassis (11) Folgendes umfasst:- Mittel (12) zum Einstellen des Auftriebs des Rahmens und zum Positionieren desselben in der definierten Tiefe, um zu verhindern, dass der Rahmen von Bewegungen der Oberfläche beeinflusst wird;- Mittel (13), um eine automatische Positionierung des Fahrzeugs im Innern des von dem Rahmen begrenzten Raums (101) zuzulassen,- Mittel (14) zum Gewährleisten des Umgreifens des Fahrzeugs nach dem Ausrichten des Chassis (11) auf das Fahrzeug (20);wobei die Mittel (13) zum automatischen Positionieren des Fahrzeugs in dem Rahmen (10) zum automatischen Ausrichten des vom Chassis (11) gebildeten Rückgrats auf die Achse des Fahrzeugs konfiguriert sind, wobei das Ausrichten gemeinsam durch Inbewegunghalten des Fahrzeugs nach dem Einführen seines vorderen Endes in die automatischen Positionierungsmittel (13) und durch die Trägheit des Rahmens gewährleistet wird.
- Handhabungsrahmen (10) nach Anspruch 1, dadurch gekennzeichnet, dass die Mittel (12) zum Einstellen des Auftriebs der Baugruppe Ballastschwimmer umfassen, die entlang dem Chassis (11) vorgesehen sind.
- Handhabungsrahmen (10) nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Mittel (13) zum Gewährleisten des Ausrichtens des Chassis (11) auf das Unterwasserfahrzeug (20) ein allgemein konisches Endstück umfassen, das an einem Ende des Chassis (11) vorgesehen ist, wobei das Endstück so dimensioniert und konfiguriert ist, dass es das vordere Ende des Fahrzeugs aufnimmt.
- Handhabungsrahmen nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass die Mittel (14) zum Gewährleisten des Umgreifens des Fahrzeugs (20) zwei angelenkte Arme (15, 16) umfassen, die an dem Chassis vorgesehen und so konfiguriert sind, dass sie die seitlichen Wände des Fahrzeugs (20) umschließen.
- Fernbedienbares Handhabungssystem eines Unterwasserfahrzeugs, dadurch gekennzeichnet, dass es Hebemittel in Verbindung mit einem Handhabungsrahmen (10) nach einem der Ansprüche 1 bis 4 umfasst, wobei die Umgreifungsvorrichtung durch ein auf eine Winde gewickeltes elektrisches Zugkabel (19) mit den Hebemitteln verbunden ist.
- Handhabungssystem nach Anspruch 5, dadurch gekennzeichnet, dass es darüber hinaus Befehls- und Steuermittel zum Gewährleisten des Ausrichtens des Chassis (11) auf das Fahrzeug (20) und zum Betätigen der verschiedenen Mittel (12, 14) des Handhabungsrahmens (10) umfasst, wobei die Befehls- und Steuersignale von dem elektrischen Zugkabel (19) übertragen werden.
- Handhabungsrahmen nach Anspruch 6, dadurch gekennzeichnet, dass die Befehls- und Steuermittel eine Kamera umfassen, die am Handhabungsrahmen (10) montiert und zum Anzeigen des Unterwasserfahrzeugs (20) bei seiner Annäherung an den Handhabungsrahmen (10) und bei Ausrichtungsoperationen des Chassis (11) auf das Fahrzeug (20) konfiguriert ist.
- Verfahren zum Zuwasserlassen eines Unterwasserfahrzeugs (20) mittels des Handhabungssystems nach einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, dass nacheinander die folgenden Operationen durchgeführt werden:- Positionieren des Handhabungsrahmens (10), der das Fahrzeug (20) enthält, über der Wasserebene;- Absenken des Handhabungsrahmens (10);- Befehlen des Eintauchens (14) des Handhabungsrahmens in die gewünschte Tiefe;- Freigeben des Fahrzeugs: Öffnen der Umgreifmittel (14);- Lenken der Wegbewegung des Fahrzeugs;- Umschalten des Fahrzeugs auf autonomen Betrieb.
- Verfahren zum Zurückholen eines Unterwasserfahrzeugs mittels des Handhabungssystems nach einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, dass nacheinander die folgenden Operationen durchgeführt werden:- Umschalten des Fahrzeugs auf ferngesteuerten Betrieb;- Lenken des Fahrzeugs beim Herannahen,- Einführen des Fahrzeugs in die Ausrichtungsmittel (13) des Handhabungsrahmens (10);- Inbewegunghalten des Fahrzeugs zum Ausrichten des Chassis (11) auf das Fahrzeug (20);- Stoppen des Fahrzeugs (20) und Schließen der Umgreifmittel (13);- erneutes Montieren des Fahrzeugs (20) in dem Handhabungsrahmen (10),- Positionieren des das Fahrzeug (20) umschließenden Handhabungsrahmens (10) im Verstaubereich.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0803058A FR2931792B1 (fr) | 2008-06-03 | 2008-06-03 | Systeme pour la mise a l'eau et la recuperation automatiques d'un drone sous-marin |
| PCT/EP2009/056821 WO2009147176A1 (fr) | 2008-06-03 | 2009-06-03 | Systeme pour la mise a l'eau et la recuperation automatiques d'un drone sous-marin |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2285663A1 EP2285663A1 (de) | 2011-02-23 |
| EP2285663B1 true EP2285663B1 (de) | 2013-01-23 |
Family
ID=40290080
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP09757557A Active EP2285663B1 (de) | 2008-06-03 | 2009-06-03 | System zum automatischen starten und zurückrufen einer unterwasserdrohne |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8590476B2 (de) |
| EP (1) | EP2285663B1 (de) |
| FR (1) | FR2931792B1 (de) |
| WO (1) | WO2009147176A1 (de) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2821339B1 (de) | 2006-01-20 | 2023-11-08 | Liquid Robotics, Inc. | Wellenenergie |
| US20140263851A1 (en) * | 2013-03-14 | 2014-09-18 | Liquid Robotics, Inc. | Water Vehicles |
| CN101622173B (zh) | 2007-03-02 | 2013-03-27 | 里奎德机器人技术公司 | 水上载体 |
| FR2969573B1 (fr) * | 2010-12-23 | 2013-02-08 | Eca | Dispositif de mise a l'eau et de recuperation d'un engin submersible ou de surface. |
| EP3267275B1 (de) | 2011-03-17 | 2019-10-16 | Liquid Robotics, Inc. | Wellengetriebene vorrichtungen zum ineinanderstapeln |
| EP3208185B1 (de) | 2011-06-28 | 2019-05-01 | Liquid Robotics, Inc. | Wasserfahrzeug zur gewinnung von antriebskraft wie auch elektrischer energie aus wellenbewegung |
| AU2013204965B2 (en) | 2012-11-12 | 2016-07-28 | C2 Systems Limited | A system, method, computer program and data signal for the registration, monitoring and control of machines and devices |
| FR3002916B1 (fr) * | 2013-03-05 | 2015-03-06 | Thales Sa | Systeme et procede de recuperation d'un engin sous-marin autonome |
| FR3024973B1 (fr) * | 2014-08-19 | 2016-09-30 | Dcns | Dispositif d'accueil d'un engin sous-marin et vehicule naval associe |
| DE202015006625U1 (de) * | 2015-09-18 | 2015-10-29 | Bundesrepublik Deutschland, vertreten durch das Bundesministerium der Verteidigung, vertreten durch das Bundesamt für Ausrüstung, Informationstechnik und Nutzung der Bundeswehr | Meeresboden-Sensoreinrichtung |
| JP6591044B2 (ja) * | 2016-03-29 | 2019-10-16 | コリア インスティチュート オブ オーシャン サイエンス アンド テクノロジー | 無人船回収用結合装置及びこれを利用した結合制御方法 |
| JP6848320B2 (ja) * | 2016-10-06 | 2021-03-24 | 富士ゼロックス株式会社 | 水中移動体 |
| US10077095B1 (en) * | 2017-08-05 | 2018-09-18 | Jeffrey Alan McChesney | Pin array chamber systems and methods for releasing and capturing a moving object—maritime |
| CN107914824A (zh) * | 2017-11-20 | 2018-04-17 | 中国船舶科学研究中心(中国船舶重工集团公司第七0二研究所) | 深海拖曳探测装置 |
| FR3091256B1 (fr) | 2018-12-28 | 2021-06-25 | Thales Sa | Dispositif d’accueil pour un vehicule sous-marin |
| FR3091258B1 (fr) | 2018-12-28 | 2021-04-09 | Thales Sa | Dispositif d’accueil pour un véhicule sous-marin |
| CN110001895B (zh) * | 2019-03-22 | 2020-11-06 | 天津大学 | 一种潜器收放装置 |
| CN110525579B (zh) * | 2019-09-05 | 2021-10-22 | 中船黄埔文冲船舶有限公司 | 一种打捞工装 |
| CN113023398B (zh) * | 2019-12-25 | 2022-06-24 | 沈阳新松机器人自动化股份有限公司 | 一种车载式自动布置回收装置 |
| CN111559476B (zh) * | 2020-01-20 | 2021-02-12 | 上海交通大学 | 适用于水下长柱状物体的浮游式打捞装置 |
| FR3108091B1 (fr) * | 2020-03-16 | 2024-04-26 | Ixblue | Système de manutention de drones marins ou sous-marins par ponton flottant à module d’interface de drone amovible, navire adapté |
| CN112537408B (zh) * | 2020-12-18 | 2021-09-07 | 上海大学 | 一种用于海洋传感器的全自动投放装置 |
| US11485461B2 (en) | 2021-03-15 | 2022-11-01 | Tridentis Advanced Marine Vehicles, LLC | Device and method for launching and recovering an unmanned underwater vehicle |
| USD996338S1 (en) * | 2021-08-13 | 2023-08-22 | Tridentis Advanced Marine Vehicles, LLC | Underwater vessel hull |
| GB2610594B (en) * | 2021-09-09 | 2025-07-16 | Bae Systems Plc | Submersible launcher |
| CN114506423B (zh) * | 2022-01-28 | 2024-08-09 | 集美大学 | 一种水下目标捕获系统 |
| KR102842386B1 (ko) * | 2023-05-02 | 2025-08-07 | 국립부경대학교 산학협력단 | 수중글라이더 회수를 위한 인양 장치와 그 운용 방법 |
| KR102816482B1 (ko) * | 2023-05-02 | 2025-06-04 | 국립부경대학교 산학협력단 | 수중글라이더 회수를 위한 수중무인탐사기용 2차 그리퍼 |
| KR102815408B1 (ko) * | 2023-05-02 | 2025-06-04 | 국립부경대학교 산학협력단 | 수중무인탐사기를 이용한 수중글라이더 회수 방법 |
| CN117068329A (zh) * | 2023-06-15 | 2023-11-17 | 张家港江苏科技大学产业技术研究院 | 一种升降式潜水器回收装置 |
| CN118230147B (zh) * | 2024-05-23 | 2024-08-06 | 水利部交通运输部国家能源局南京水利科学研究院 | 坝下涵洞洞身接缝接触渗漏的水下检测方法及系统 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3732838A (en) * | 1968-10-08 | 1973-05-15 | F Kriedt | Submersible salvage unit and method of operation |
| DE4140201C2 (de) * | 1991-12-03 | 1996-04-04 | Fr Luerssen Werft Gmbh & Co | Vorrichtung für das Ausbringen und Einholen von Schleppkörpern |
| JP3350892B2 (ja) * | 1995-04-17 | 2002-11-25 | 防衛庁技術研究本部長 | 水中航走体の揚収装置 |
| US5995882A (en) * | 1997-02-12 | 1999-11-30 | Patterson; Mark R. | Modular autonomous underwater vehicle system |
| US6167831B1 (en) * | 1999-09-20 | 2001-01-02 | Coflexip S.A. | Underwater vehicle |
| US6390012B1 (en) * | 1999-09-20 | 2002-05-21 | Coflexip, S.A. | Apparatus and method for deploying, recovering, servicing, and operating an autonomous underwater vehicle |
| EP1658219A1 (de) * | 2003-01-22 | 2006-05-24 | Slobodan Stojic | Roboterartiges modulares handhabungssystem zum bergen von schiffsteilen und ausrüstungsgegenständen aus grossen tiefen |
| FR2904288B1 (fr) * | 2006-07-26 | 2009-04-24 | Ifremer | Installation et procede de recuperation d'un engin sous-marin ou marin |
| FR2904287B1 (fr) * | 2006-07-26 | 2008-10-24 | Ifremer | Appareil de recuperation d'un engin sous-marin ou marin |
| US20080300742A1 (en) * | 2007-05-30 | 2008-12-04 | Oceaneering International, Inc. | Hybrid remotely/autonomously operated underwater vehicle |
| US8437885B1 (en) * | 2012-01-23 | 2013-05-07 | The United States Of America As Represented By The Secretary Of The Navy | System and method for a launch control console for communication with unmanned underwater vehicles |
-
2008
- 2008-06-03 FR FR0803058A patent/FR2931792B1/fr not_active Expired - Fee Related
-
2009
- 2009-06-03 EP EP09757557A patent/EP2285663B1/de active Active
- 2009-06-03 US US12/995,982 patent/US8590476B2/en not_active Expired - Fee Related
- 2009-06-03 WO PCT/EP2009/056821 patent/WO2009147176A1/fr not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| FR2931792A1 (fr) | 2009-12-04 |
| US20110192338A1 (en) | 2011-08-11 |
| FR2931792B1 (fr) | 2010-11-12 |
| EP2285663A1 (de) | 2011-02-23 |
| US8590476B2 (en) | 2013-11-26 |
| WO2009147176A1 (fr) | 2009-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2285663B1 (de) | System zum automatischen starten und zurückrufen einer unterwasserdrohne | |
| EP2155543B1 (de) | U-boot mit vorrichtung zur freisetzung und einholung eines sekundären unterwasserfahrzeuges | |
| EP2043911B1 (de) | Anlage und verfahren zur wiederherstellung eines unterwasser- oder wasserfahrzeugs | |
| EP2551185B1 (de) | Wasser- oder Unterwassergerät und entsprechendes Ankoppelungsverfahren | |
| EP3902742B1 (de) | Andockvorrichtung für ein unterwasserfahrzeug | |
| EP2043913A1 (de) | Vorrichtung zur wiederherstellung eines unterwasser- oder wasserfahrzeugs | |
| EP2076426B1 (de) | Vorrichtung zum automatischen befestigen und lösen eines geschleppten sonarsenders an und von einer aktiven sonarschleppleine | |
| EP4377197A1 (de) | Bergungs- und/oder startsystem für ein see- oder unterwasserfahrzeug, insbesondere autonome, halbautonome oder gezogene fahrzeuge, aus einem schiff | |
| EP3209546B1 (de) | System zum aussetzen und bergen von see- und unterseevorrichtungen mit unterstützung durch kippbare schutzkomponenten | |
| CA2960706C (fr) | Engin marin ou sous-marin et procede d'arrimage associe | |
| FR3062844A1 (fr) | Systeme de mise a l'eau et de recuperation d'un engin propulse depuis le pont d'un navire porteur | |
| EP2621796B1 (de) | System mit einem unterwasserfahrzeug und einer basis an der oberfläche | |
| EP4041625B1 (de) | Geschleppte unterwasservorrichtung und system zur handhabung der unterwasservorrichtung | |
| WO2022194963A1 (fr) | Systeme de traction a aile captive avec dispositif de saisie des lignes de pliage | |
| FR3027013A1 (fr) | Accrochage d'un poisson dans un sonar remorque | |
| EP4101806B1 (de) | Unterwasserausrüstung zum spannen von ankerleinen einer offshore-struktur und verfahren zur installation einer solchen ausrüstung | |
| EP4559799A1 (de) | Start- und rückholvorrichtung für ein wasserfahrzeug mit einem gespannten seil | |
| EP4559798A1 (de) | Vorrichtung zum starten und bergen eines wasserfahrzeugs mit einem dreieckigen kabel |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20101202 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA RS |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B63B 27/36 20060101ALI20120720BHEP Ipc: B63C 7/20 20060101ALI20120720BHEP Ipc: B63B 35/40 20060101AFI20120720BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 594798 Country of ref document: AT Kind code of ref document: T Effective date: 20130215 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602009013023 Country of ref document: DE Effective date: 20130321 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20130123 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 594798 Country of ref document: AT Kind code of ref document: T Effective date: 20130123 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20130123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130523 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130423 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130504 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130523 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130424 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| BERE | Be: lapsed |
Owner name: THALES Effective date: 20130630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| 26N | No opposition filed |
Effective date: 20131024 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602009013023 Country of ref document: DE Effective date: 20131024 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130603 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130630 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130123 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20090603 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130603 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20190531 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: MMEP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200630 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230606 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250514 Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250515 Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250523 Year of fee payment: 17 |