EP2673199B1 - Einheit zum anbringen eines etiketts auf einem entsprechenden artikel - Google Patents
Einheit zum anbringen eines etiketts auf einem entsprechenden artikel Download PDFInfo
- Publication number
- EP2673199B1 EP2673199B1 EP12703311.6A EP12703311A EP2673199B1 EP 2673199 B1 EP2673199 B1 EP 2673199B1 EP 12703311 A EP12703311 A EP 12703311A EP 2673199 B1 EP2673199 B1 EP 2673199B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- transmission means
- unit
- movable member
- driving shaft
- coupling portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
- 230000005540 biological transmission Effects 0.000 claims description 66
- 230000008878 coupling Effects 0.000 claims description 34
- 238000010168 coupling process Methods 0.000 claims description 34
- 238000005859 coupling reaction Methods 0.000 claims description 34
- 238000002372 labelling Methods 0.000 claims description 33
- 230000033001 locomotion Effects 0.000 claims description 33
- 238000003780 insertion Methods 0.000 description 8
- 230000037431 insertion Effects 0.000 description 8
- 230000004913 activation Effects 0.000 description 7
- 238000006073 displacement reaction Methods 0.000 description 7
- 238000003466 welding Methods 0.000 description 7
- 238000005452 bending Methods 0.000 description 3
- 238000010380 label transfer Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 235000013361 beverage Nutrition 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C3/00—Labelling other than flat surfaces
- B65C3/06—Affixing labels to short rigid containers
- B65C3/065—Affixing labels to short rigid containers by placing tubular labels around the container
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/02—Devices for moving articles, e.g. containers, past labelling station
- B65C9/04—Devices for moving articles, e.g. containers, past labelling station having means for rotating the articles
Definitions
- the present invention relates to a unit for applying a label on a relative article according to the preamble of claim 1. More particularly, the invention refers to a unit for applying a label made from heat-shrinking film on a bottle - or other generic container - which the following description will refer to, although this is in no way intended to limit the scope of protection as defined by the accompanying claims.
- labelling machines are used to apply labels to containers or articles of all sorts.
- tubular labels commonly called “sleeve labels”
- a particular type of labelling machine which serves to bend and weld labels in a tubular configuration and to produce insertion of containers into the thus formed tubular labels.
- This type of machine basically comprises a carousel rotating about a vertical axis to define a circular path, along which a succession of unlabelled containers is received. Furthermore, this machine is designed to receive a corresponding succession of rectangular or square labels from respective input wheels; to produce application of the labels in a tubular configuration onto respective containers; and to release the labelled containers to an output wheel.
- the carousel comprises a number of labelling units which are equally spaced about the rotation axis, are mounted along a peripheral edge of the carousel and are moved by the latter along the above-mentioned circular path.
- Each labelling unit comprises a bottom supporting assembly adapted to support the bottom wall of a relative container and an upper retainer adapted to cooperate with the top portion of such container to hold it in a vertical position as the carousel rotates about the vertical axis.
- Each supporting assembly comprises a vertical hollow supporting mount, secured to a horizontal plane of a rotary frame of the carousel, and a cylindrical movable member, engaging the supporting mount in sliding and rotating manner with respect to its axis, and adapted to carry a relative container on its top surface and a relative label on its lateral surface.
- Each movable member can be displaced between a raised position and a fully retracted position within the relative supporting mount.
- each movable member protrudes from a top surface of the relative supporting mount and is adapted to receive a relative label on its lateral surface from the label input wheel; in particular the label is wrapped around the movable member such that opposite vertical edges of the label overlap one another.
- the movable member is rotated about its axis during the transfer of the label from the label input wheel.
- each movable member In the fully retracted position, which is reached at the container input and output wheels, the top surface of each movable member is flush with the top surface of the supporting mount so that containers are transferred onto and from the carousel along the same transfer plane.
- the displacement of the relative movable member from the raised position to the fully retracted position produces the insertion of the relative container inside the label, making the thus obtained labeled container ready to be transferred to the output wheel.
- each movable member is:
- each movable member is controlled by an electric motor, whilst the translational motion of said movable member is obtained through use of a cam having a given profile.
- WO 2010/040337 discloses a labelling unit as defined in the preamble of claim 1.
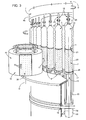
- Number 1 in Figure 1 indicates as a whole a labelling machine for applying labels 2 ( Figures 2 and 3 ) to respective articles or more specifically containers, particularly bottles 3, each of which ( Figures 1 to 3 ) has a given longitudinal axis A, is bonded at the bottom by a bottom wall 4 substantially perpendicular to axis A, and has a top neck 5 substantially coaxial with axis A.
- Machine 1 comprises a conveying device that serves to bend and weld labels 2 in a tubular configuration ( Figure 3 ) and to produce insertion of bottles 3 into the so formed tubular labels 2.
- the conveying device comprises a carousel 7, which is mounted to rotate continuously (anticlockwise in Figure 1 ) about a respective vertical axis B perpendicular to the plane of Figure 1 .
- the carousel 7 receives a succession of unlabelled bottles 3 from an input wheel 8, which cooperates with carousel 7 at a first transfer station 9 and is mounted to rotate continuously (clockwise in Figure 1 ) about a respective longitudinal axis C parallel to axis B.
- the carousel 7 also receives a succession of rectangular or square labels 2 from an input drum 10, which cooperates with carousel 7 at a second transfer station 11 and is mounted to rotate continuously about a respective longitudinal axis D parallel to axes B and C.
- the carousel 7 releases a succession of labelled bottles 3 to an output wheel 12, which cooperates with carousel 7 at a third transfer station 13 and is mounted to rotate continuously (clockwise in Figure 1 ) about a respective longitudinal axis E parallel to axes B, C and D.
- transfer station 11 is arranged, along path P, downstream from transfer station 9 and upstream from transfer station 13.
- the carousel 7 comprises a number of operating or labelling units 15, which are equally spaced about axis B, are mounted along a peripheral edge of carousel 7, and are moved by carousel 7 along a circular path P extending about axis B and through transfer stations 9, 11 and 13.
- the units 15 are secured to a horizontal rotary table 14 of carousel 7, have respective axes F parallel to axes B, C, D, E and extend coaxially through respective holes 16 of the rotary table 14 and on both sides of such table.
- Each unit 15 is adapted to receive a relative bottle 3 from input wheel 8 in a vertical position, i.e. coaxially with the relative axis F, and to hold said bottle 3 in such position along path P from transfer station 9 to transfer station 13.
- Units 15 being all identical to each other, only one of them is described herebelow for the sake of simplicity and clarity; it shall be apparent that the features described hereafter with reference to one labelling unit 15 are common to all of them.
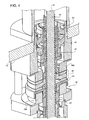
- labelling unit 15 comprises, above the rotary table 14 of carousel 7, a supporting assembly 17 adapted to support the bottom wall 4 of a relative bottle 3 and an upper retainer 18 adapted to cooperate with the top neck 5 of the bottle 3.
- supporting assembly 17 comprises:
- the bottle 3 rests on a support plate 21 (only dimly visible in Figures 2 and 3 ), which is carried by top end 23 of movable member 22 through interposition of a relative bearing (not visible), so as to be rotatably independent of movable member 22.
- a support plate 21 (only dimly visible in Figures 2 and 3 )
- a relative bearing (not visible)
- Movable member 22 can be moved along axis F between a fully retracted position within the relative supporting mount 20 and a raised position ( Figures 2 and 3 ).
- movable member 22 In the fully retracted position, movable member 22 is completely housed within the relative supporting mount 20 so that support plate 21 is flush with a top surface 25 of the supporting mount 20.
- movable member 22 protrudes from the top surface 25 of the supporting mount 20 and is adapted to receive, on its lateral surface 24, a relative label 2 from input drum 10.
- labels 2 are cut in a known manner from a web 26 ( Figure 1 ) by a cutting device 27 (only schematically shown in Figure 1 ) and fed to input drum 10 to be then transferred to the relative movable members 22 in the raised position.
- the cut labels 2 are retained on a lateral surface 30 of input drum 10 by suction; in fact, the lateral surface 30 of input drum 10 is divided into a given number - three in the embodiment shown - of suction regions 31, which are equally spaced about axis D, are each provided with a plurality of through holes 32 connected to a pneumatic suction device (known per se and not shown) and are adapted to cooperate with respective labels 2.
- a pneumatic suction device known per se and not shown
- the lateral surface 24 of the movable member 22 is provided with a plurality of through holes 33, in turn connected to a pneumatic suction device (known per se and not shown) so as to retain the relative label 2 by suction.
- movable member 22 can be rotated about the relative axis F in order to produce the complete wrapping of the relative label 2, coming from input drum 10, on lateral surface 24. More specifically, each label 2, fed by input drum 10, is wrapped around the relative movable member 22 in the raised position so as to form a cylinder with opposite vertical edges 34 overlapping one another.
- movable member 22 is subjected to distinct movements in different operative steps of the labelling machine 1:
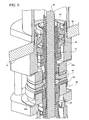
- motor 35 is arranged underneath rotary table 14 and is secured to a bottom surface of the rotary table 14 through the interposition of a further hollow supporting mount 38 of axis F.
- the supporting mount 38 has one end 39 secured to the bottom surface of the rotary table 14 around the relative hole 16 and coaxially with supporting mount 20, and an opposite end 40, from which motor 35 coaxially projects downwards.
- driving shaft 36 extends coaxially through motor 35, supporting mounts 20, 38 and hole 16 of rotary table 14; more specifically, driving shaft 36 is angularly and axially fastened to movable member 22, is angularly coupled to motor 35 and is supported by such motor 35 in an axially free manner.
- unit 15 comprises first transmission means 90 for angularly coupling motor 35 and driving shaft 36.
- driving shaft 36 comprises a screw portion 43 which is defined by an externally threaded surface 45 provided on a longitudinal region of driving shaft 36. Furthermore, driving shaft 36 has (see, in particular, Figure 6 ) a plurality of longitudinal grooves 91 provided on the externally threaded surface 45 and extending at least over the whole of said screw portion 43.
- grooves 91 are angularly equally spaced about the axis of driving shaft 36.
- driving shaft 36 comprises three longitudinal grooves 91 spaced apart from one another of 120°.
- First transmission means 90 are axially fixed relative to rotary table 14 through supporting mount 38, whilst being at a time rotatable relative to axis F of supporting mount 38. More particularly, first transmission means 90 comprise a collet 92 internally provided with a plurality of ribs (not shown) for engaging and cooperating with the relative longitudinal grooves 91 of driving shaft 36.
- the ribs shall also preferably be angularly equally spaced about the axis of collet 92 and in a number corresponding to the number of longitudinal grooves 91.
- collet 92 is fastened, e.g. releasably, to the rotor of motor 35.
- collet 92 is likewise releasably fastened to an axial coupling portion 93 of first transmission means 90.
- the axial coupling portion 93 is rotatable over a corresponding first axial coupling portion 38a of supporting mount 38.
- first transmission means 90 are radially fixed with respect to supporting mount 38 and, consequently, to rotary table 14.
- the unit 15 further comprises second transmission means 41, which can be selectively actuated to transform the rotational movement imparted by motor 35 to driving shaft 36 in a resulting movement of the relative movable member 22 having a translational component along axis F, said second transmission means 41 being radially fixed with respect to the supporting mount 38 and, consequently, to rotary table 14.
- the second transmission means 41 are movable between a first axial position wherein they are kinematically integral with the first transmission means 90 and a second axial position wherein they are kinematically independent of the first transmission means 90 and integral with supporting mount 38 and, consequently, with rotary table 14.
- second transmission means 41 comprise a tubular lead screw member 42, which internally engages with the screw portion 43 of driving shaft 36.
- second transmission means 41 comprise an axial coupling portion 94 to which lead screw member 41 is directly or indirectly releasably fastened.
- the axial coupling portion 94 is rotatable over a corresponding second axial coupling portion 38b of supporting mount 38.
- the axial coupling portion 94 of second transmission means 41 is arranged between the second axial coupling portion 38b and the axial coupling portion 93 of first transmission means 90.
- second transmission means 41 are movable between a first axial position wherein they are kinematically integral with the axial coupling portion 93 of first transmission means 90 and a second axial position wherein they are kinematically independent of the first transmission means 90 and kinematically integral with the second axial coupling portion 38b and, therefore, with supporting mount 38 (i.e. with rotary table 14).
- second transmission means 41 When second transmission means 41 are in the first axial position, they are kinematically integral with the first transmission means 90, hence they shall rotate integrally with driving shaft 36 when the latter is driven to rotate by motor 35.
- second transmission means 41 are in the second axial position, they are kinematically integral with supporting mount 38 and the rotary table 14. As a consequence, through cooperation of the screw portion 43 of driving shaft 35 with the lead screw 43 of second transmission means 41, transformation of the pure rotational movement imparted by motor 35 to the driving shaft 36 into a rotational-translational movement of the same shaft 36 along axis F is obtained.
- Movable member 22 being axially connected with driving shaft 36, translational movement of movable member 22 along axis F is also produced.
- displacement of the second transmission means 41 between the relative first and second axial positions may be achieved by selective actuation of electromagnetic means.
- first and second axial coupling portions 38a and 38b may advantageously consist of independently and selectively actuatable electromagnets, the axial coupling portion 94 of second transmission means 41 being made of a material capable of being attracted by an electromagnet.
- movement of second transmission means 41 may be obtained by pneumatic means, or by means of cams and the like.
- the pure rotational movement of driving shaft 36 and the relative movable member 22 about axis F is obtained by maintaining second transmission means 41 in the first axial position wherein they are also driven to rotate with the driving shaft 36, the rotational movement being transmitted to the second transmission means 41 through collet 92 and the axial coupling portion 93 of first transmission means 90, with which they are maintained kinematically integral.
- Kinematic coupling of second transmission means 41 and first transmission means 90 is preferably achieved through activation of the electromagnet of the first axial coupling portion 38a of supporting mount 38.
- the translational movement of driving shaft 36 and the relative movable member 22 along axis F is obtained by maintaining the second transmission means in the second axial position wherein they are kinematically independent of the first transmission means 90 and angularly and axially integral supporting mount 38 and rotary table 14.
- Kinematic uncoupling of second transmission means 41 relative to first transmission means 90 is preferably achieved through activation of the electromagnet of the second axial coupling portion 38b of supporting mount 38.
- the driving shaft 36 is alternatively operatively coupled with first transmission means 90 alone (when second transmission means 41 are in the first axial position) with both first and second transmission means 90, 41 (when second transmission means are in the second axial position).
- the retainer 18, corresponding to the described supporting assembly 17 comprises, in a known manner, a cylindrical movable member 65, which protrudes vertically from an upper rotary portion 66 of carousel 7, can be displaced along the relative axis F and has a bell-shaped free end portion 67 adapted to cooperate with the top neck 5 of the bottle 3 carried by such supporting assembly 17.
- each movable member 65 is controlled in a known manner so as to maintain the same distance between its end portion 67 and the corresponding plate 21, during the movement of the relative unit 15 along the portion of path P from transfer station 9 to transfer station 13, and to increase such distance at transfer stations 9, 13 and during the portion of path P from station 13 to station 9.
- bottles 3 are securely hold in their vertical positions during the travel from station 9 to station 13 and are free to be transferred at such stations 9 and 13 from input wheel 8 and to output wheel 12, respectively.
- labelling machine 1 further comprises a plurality of welding devices 70, each of which arranged in front of, and in a radially inner position than, the relative unit 15 and adapted to cooperate, in a known manner, with the label 2 wrapped around the corresponding movable member 22 for welding the overlapped edges 34 and to produce a tubular configuration of such label.
- the downward movement of the relative movable member 22 towards the fully retracted position within the relative supporting mount 20 produces the insertion of the relative bottle 3 inside said tubular label.
- the so formed labelled bottle 3 is then fed to a shrinking tunnel (known per se and not shown), where shrinking and adhesion of the label 2 to the external surface of the bottle 3 occurs.
- angle ⁇ refers to the lifting movement of the movable members 22 from the fully retracted position to the raised position
- angle ⁇ refers to the label transfer from the input drum 10 to the relative movable member 22
- angle ⁇ refers to the welding operation on the overlapped edges 34 of the tubular labels 2
- angle ⁇ refers to the downward movement of the movable members 22 to produce insertion of the bottles 3 within the corresponding tubular labels 2.
- machine 1 Operation of machine 1 will now be described with reference to the labelling of one bottle 3, and therefore to one labelling unit 15, and as of the instant in which the movable member 22 of said unit 15 is in the fully retracted position within the relative supporting mount 20 and has just received the unlabelled bottle 3 from input wheel 8.
- the second transmission means 41 are moved to their second axial position, preferably through activation of the electromagnet of the second axial coupling portion 38b of supporting mount 38, and the motor 35 is actuated. Thanks to the coupling between the lead screw member 42 of the second transmission means 41 and driving shaft 36, the lead screw member 42 being kinematically integral with the rotary table 14, the driving shaft 36 moves along and about axis F thereby producing a corresponding rotational-translational movement of the movable member 22 towards the desired raised position.
- the input drum 10 reaches an angular position around axis D adapted to put the label 2 into contact with the movable member 22 passing through such station; in this condition (angle ⁇ ), a pure rotational movement of movable member 22 around axis F is required to produce complete wrapping of the label 2 in a known manner around such movable member 22 ( Figure 3 ). More specifically, the label 2 reaches a cylindrical configuration with the opposite vertical edges 34 overlapped one another.
- the second transmission means 41 are moved to their first axial position, preferably through activation of the electromagnet of the first axial coupling portion 38a of supporting mount 38, and the motor 35 is actuated.
- the second transmission means 41 having thus been made kinematically integral with the first transmission means 90, a purely rotational movement is imparted by the motor 35 to the driving shaft 36. Said purely rotational movement is thus transferred to the movable member 22.
- the sleeve element which is axially locked between the seat of motor 35 and end 40 of supporting mount 38, prevents any displacement of driving shaft 36 along axis F.
- the label 2 is ready to be welded along the edges 34 by activation of the welding device 70 (angle Y).
- the movable member 22 must be returned to the fully retracted position within the relative supporting mount 20, so as to produce the insertion of the bottle 3 inside the so formed tubular label 2.
- This movement is once again obtained by moving the second transmission means 41 into their second axial position, preferably through activation of the electromagnet of the second axial coupling portion 38b of supporting mount 38, and by actuating motor 35 in the direction opposite the one for producing the upward movement of the driving shaft 36 and the movable member 22.
- Heat-shrinking (the implementation of which is not illustrated) can be subsequently performed on the bottles 3 exiting the carousel 7 to cause shrinking and adhesion of the label 2 to the external surface of the relative bottle.
- the new solution makes it possible to use one single motor 35 for controlling both rotational and translational movements of each movable member 22.
- cam means for lifting and lowering movable members 22 are no longer necessary, whereby a significant reduction of costs for the manufacture of the labelling machine 1 is achieved.
- the height of the movable member 22 protruding from the relative supporting mount 20 can be set in accordance with the height of the processed labels 2 simply by controlling the time of actuation of the motor 35.
- the labelling units 15 makes it possible to apply a large variety of labels 2 of different heights to respective bottles 3 without requiring that machine parts, such as fixed cam means, be replaced with every change in label height.
- first and second transmission means 90 and 41 require only a small displacement of parts of the labelling unit 15 along the axial direction, which means that radial encumbrance of the labelling unit 15 is kept at a minimum.
- both first and second transmission means 90 and 41 operatively engage the same portion of driving shaft 36 - namely the screw portion 43 which is, by design and construction, adapted to engage with both transmission means, in that it is provided with both longitudinal grooves and screwed outer surface - also the overall vertical encumbrance of labelling unit 15 is advantageously restrained.
Landscapes
- Labeling Devices (AREA)
- Auxiliary Devices For And Details Of Packaging Control (AREA)
Claims (14)
- Etikettiereinheit (15), die zum Aufnehmen eines Artikels (3) und eines Etiketts (2) und zum Aufbringen des Etiketts (2) auf den Artikel (3) entlang eines gegebenen Weges (P) bewegbar ist, wobei die Einheit (15) umfasst:- eine Trägereinrichtung (20, 38);- ein bewegliches Element (22), das so ausgebildet ist, dass dieses den Artikel (3) tragen kann, und durch die Trägereinrichtung (20, 38) in einer gleitenden und rotierenden Weise mit Bezug auf eine gegebene Achse (F) gehalten wird; und- eine Betätigungseinrichtung (35, 36, 41) zum Erzeugen einzelner Bewegungen des beweglichen Elements (22) in unterschiedlichen Betriebsschritten der Etikettiereinheit (15), wobei die einzelnen Bewegungen eine reine Rotation um die Achse (F) und eine Translation entlang der gleichen Achse (F) umfassen, wobei die Betätigungseinrichtung umfasst:- einen Motor (35),- eine Antriebswelle (36), die mit dem beweglichen Element (22) koaxial gekoppelt ist und durch den Motor (35) betätigt wird, so dass diese um die Achse (F) dreht;- eine erste Übertragungseinrichtung (90) zum winkelförmigen Ankoppeln des Motors (35) an die Antriebswelle (36),- dadurch gekennzeichnet, dass die Betätigungseinrichtung ferner eine zweite Übertragungseinrichtung (41) umfasst, welche wahlweise betätigt werden kann, um die vom Motor (35) übermittelte Rotationsbewegung auf die Antriebswelle (36) in eine resultierende Bewegung des jeweiligen beweglichen Elements (22) mit einer Translationskomponenten entlang der Achse (F) umzuwandeln, wobei die zweite Übertragungseinrichtung (41) beweglich ist zwischen: einer ersten axialen Position, in welcher diese mit der ersten Übertragungseinrichtung (90) kinematisch einstückig sind, und einer zweiten axialen Position, in welcher diese von der ersten Übertragungseinrichtung (90) kinematisch unabhängig und mit der Trägereinrichtung (38) einstückig sind.
- Einheit nach Anspruch1 in welcher die zweite Übertragungseinheit (41) in Bezug zu der Trägereinrichtung (38) radial fixiert ist.
- Einheit nach Anspruch 2, in welcher die reine Rotation des beweglichen Elements (22) um die Achse (F) durch ein Bewegen der zweiten Übertragungseinrichtung (41) in ihre erste axiale Position und ein Betätigen des Motors (35) erhalten wird.
- Einheit nach Anspruch 2 oder 3, in welcher die Translation des beweglichen Elements (22) entlang der Achse (F) durch Bewegen der zweiten Übertragungseinrichtung (41) in ihre zweite axiale Position und Betätigen des Motors (35) erhalten wird.
- Einheit nach einem der Ansprüche 2 bis 4, in welcher, wenn sich die Einheit 15 entlang des Weges P bewegt, die Antriebswelle (36) betrieblich gekoppelt ist alternativ mit der ersten Übertragungseinrichtung (90) alleine, wobei sich die Übertragungseinrichtung (41) dann in der ersten axialen Position befindet, und mit sowohl der ersten als auch mit der zweiten Übertragungseinrichtung (90, 41), wobei sich die zweite Übertragungseinrichtung dann in der zweiten axialen Position befindet.
- Einheit nach einem der vorstehenden Ansprüche, in welcher die Antriebswelle (36) umfasst: einen Schraubenbereich (43), welcher durch eine Außengewindefläche (45) gebildet wird, die auf einem Längsbereich der Antriebswelle (36) vorgesehen ist, und eine Mehrzahl von Längsrillen (91), die auf der Außengewindefläche (45) vorgesehen sind und sich wenigstens über die Gesamtheit des Schraubenbereichs (43) erstrecken.
- Einheit nach einem der vorstehenden Ansprüche, in welcher die Übertragungseinrichtung (90) eine Klemmhülse (92) umfasst, die innen mit einer Mehrzahl von Rippen (93) versehen ist, um in die jeweiligen Längsrillen (91) der Antriebswelle (36) einzugreifen und mit diesen zusammenzuwirken.
- Einheit nach Anspruch 7, in welcher die Klemmhülse (92) an einem Rotor des Motors (35) und an einem axialen Kupplungsbereich (93) der ersten Übertragungseinrichtung (90) befestigt ist, wobei der axiale Kupplungsbereich (93) über einen korrespondierenden ersten axialen Kupplungsbereich (38a) der Trägereinrichtung (38) drehbar ist.
- Einheit nach einem der Ansprüche 6 bis 8, in welcher die zweite Übertragungseinrichtung (41) ein rohrförmiges Leitspindelelement (42) umfasst, welches innen an dem Schraubenbereich (43) der Antriebswelle (36) befestigt ist.
- Einheit nach Anspruch 9, in welcher die zweite Übertragungseinrichtung (41) einen axialen Kupplungsbereich (94) umfasst, an welchen das Leitspindelelement (41) befestigt ist, wobei der axiale Kupplungsbereich (94) über einen korrespondierenden zweiten axialen Kupplungsbereich (38b) der Trägereinrichtung (38) drehbar ist.
- Einheit nach Anspruch 10, in welcher der axiale Kupplungsbereich (94) der zweiten Übertragungseinrichtung (41) zwischen dem zweiten axialen Kupplungsbereich (38b) und dem axialen Kupplungsbereich (93) der ersten Übertragungseinrichtung (90) angeordnet ist.
- Einheit nach einem der vorstehenden Ansprüche, in welcher eine Bewegung der zweiten Übertragungseinrichtung (41) zwischen der ersten und zweiten axialen Position durch eine wahlfreie Betätigung einer elektromagnetischen Einrichtung erreicht wird.
- Einheit nach einem der Ansprüche 10 bis 12, in welcher der erste und zweite axiale Kupplungsbereich (38a, 38b) jeweils aus unabhängigen und wahlfrei betätigbaren Elektromagneten besteht, wobei der axiale Kupplungsbereich (94) der zweiten Übertragungseinrichtung (41) aus einem Material hergestellt ist, das durch einen Elektromagneten angezogen werden kann.
- Einheit nach einem der vorstehenden Ansprüche, in welcher die Trägereinrichtung wenigstens einen fixierten hohlen Trägerpfosten (20) umfasst, der durch die Antriebswelle (36) koaxial durchquert wird und an den das bewegliche Element (22) angreift.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITTO2011A000104A IT1404050B1 (it) | 2011-02-08 | 2011-02-08 | Unita' per l'applicazione di un'etichetta su di un relativo articolo. |
| PCT/EP2012/052153 WO2012107506A1 (en) | 2011-02-08 | 2012-02-08 | A unit for applying a label on a relative article |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2673199A1 EP2673199A1 (de) | 2013-12-18 |
| EP2673199B1 true EP2673199B1 (de) | 2014-12-03 |
Family
ID=43976436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12703311.6A Not-in-force EP2673199B1 (de) | 2011-02-08 | 2012-02-08 | Einheit zum anbringen eines etiketts auf einem entsprechenden artikel |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2673199B1 (de) |
| IT (1) | IT1404050B1 (de) |
| WO (1) | WO2012107506A1 (de) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5833813B2 (ja) * | 1977-12-19 | 1983-07-22 | 東洋ガラス株式会社 | プラスチツクスリ−ブの製造方法および装置 |
| ITPR20020049A1 (it) * | 2002-08-27 | 2004-02-28 | Simonazzi S P A Gia Sig Simonazzi Spa | Procedimento per formare etichette tubolari in film termoretraibile e macchina per formare etichette ed inserire bottiglie o contenitori in genere all'interno delle etichette formate. |
| WO2010040397A1 (en) * | 2008-10-08 | 2010-04-15 | Sidel S.P.A. | Labelling machine for sleeve labels |
-
2011
- 2011-02-08 IT ITTO2011A000104A patent/IT1404050B1/it active
-
2012
- 2012-02-08 WO PCT/EP2012/052153 patent/WO2012107506A1/en not_active Ceased
- 2012-02-08 EP EP12703311.6A patent/EP2673199B1/de not_active Not-in-force
Also Published As
| Publication number | Publication date |
|---|---|
| ITTO20110104A1 (it) | 2012-08-09 |
| IT1404050B1 (it) | 2013-11-08 |
| EP2673199A1 (de) | 2013-12-18 |
| WO2012107506A8 (en) | 2012-12-20 |
| WO2012107506A1 (en) | 2012-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2550202B1 (de) | Etikettierungsgerät | |
| US7870882B2 (en) | Process and apparatus for forming tubular labels of heat shrinkable film and inserting containers therein | |
| CN104276315A (zh) | 贴标机及对容器贴标的方法 | |
| EP2464569B1 (de) | Etikettiermaschine zum anbringen rohrförmiger etiketten auf entsprechende artikel | |
| US11667425B2 (en) | Vacuum drum for a labeling unit, and labeling unit comprising a vacuum drum of this type | |
| EP2889229B1 (de) | Maschine zum Bearbeiten von Behältern mit verbesserter Kontrollarchitektur | |
| EP2673198A1 (de) | Vakuumübertragungselement und verfahren zur übertragung von schlauchetiketten | |
| US9522757B2 (en) | Method and unit for forming tubular lengths of web material particularly in a labelling machine | |
| EP2516277B1 (de) | Einheit zum anbringen eines etiketts auf einen entsprechenden artikel | |
| WO2011018807A1 (en) | A unit for applying a label on a relative article | |
| EP2673199B1 (de) | Einheit zum anbringen eines etiketts auf einem entsprechenden artikel | |
| EP2883804B1 (de) | Etikettiereinheit zum Anbringen eines Etiketts auf einen Artikel | |
| EP2886475B1 (de) | Etikettiereinheit zum Anbringen eines Etiketts auf einen Artikel | |
| EP2626312B1 (de) | Verfahren und Einheit zur Formung rohrförmiger Längen von Bahnmaterial, insbesondere in einer Etikettiermaschine | |
| EP2883805A1 (de) | Etikettiereinheit und Verfahren zum Anbringen eines Etiketts auf einen nichtzylindrischen, etikettenaufnehmenden Abschnitt eines Artikels | |
| WO2011104732A1 (en) | A unit for applying a label on a relative article | |
| CN119486888A (zh) | 使用可移动激光装饰对容器进行装饰的装饰机器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20130809 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20140620 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 699211 Country of ref document: AT Kind code of ref document: T Effective date: 20141215 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602012004115 Country of ref document: DE Effective date: 20150115 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20141203 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 699211 Country of ref document: AT Kind code of ref document: T Effective date: 20141203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150303 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150304 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150403 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150403 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602012004115 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150208 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150228 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150228 |
|
| 26N | No opposition filed |
Effective date: 20150904 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150208 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160208 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160208 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20170119 Year of fee payment: 6 Ref country code: FR Payment date: 20170124 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120208 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20170120 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602012004115 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141203 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20181031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180901 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180208 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180228 |