EP2808217A1 - Fahrzeugsicherheitsanordnung und -verfahren - Google Patents
Fahrzeugsicherheitsanordnung und -verfahren Download PDFInfo
- Publication number
- EP2808217A1 EP2808217A1 EP13169358.2A EP13169358A EP2808217A1 EP 2808217 A1 EP2808217 A1 EP 2808217A1 EP 13169358 A EP13169358 A EP 13169358A EP 2808217 A1 EP2808217 A1 EP 2808217A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- host vehicle
- vehicle
- behind
- intention
- determining
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/085—Taking automatic action to adjust vehicle attitude in preparation for collision, e.g. braking for nose dropping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
- B62D15/0265—Automatic obstacle avoidance by steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
Definitions
- Embodiments herein relate to a vehicle safety arrangement for preventing or mitigating accidents when turning across lanes with oncoming traffic in a vehicle hosting the arrangement, the host vehicle further comprising an Electrical Power Assisted Steering operable to steer one or more wheels of the host vehicle.
- Still further embodiments herein relate to a motor vehicle comprising a vehicle safety arrangement for preventing or mitigating accidents when turning across lanes with oncoming traffic in a vehicle hosting the arrangement, the host vehicle further comprising an Electrical Power Assisted Steering operable to steer one or more wheels of the host vehicle.
- Embodiments herein aim to provide an improved vehicle safety arrangement for preventing or mitigating accidents when turning across lanes with oncoming traffic in a vehicle hosting the arrangement, the host vehicle further comprising an Electrical Power Assisted Steering operable to steer one or more wheels of the host vehicle.
- the arrangement comprising: one or more forward-looking detection systems for detecting oncoming traffic in one or more lanes adjacent to the lane travelled by the host vehicle; one or more rearward-looking detection systems for detecting other vehicles approaching the host vehicle from behind; one or more turning intention detection systems for determining an intention to turn across an adjacent lane; means for determining standstill of the host vehicle: a control unit arranged to, during determined standstill of the host vehicle and a determined intention to turn across a lane containing oncoming traffic, determine a risk of the host vehicle being hit from behind; and, upon determining a high risk of the host vehicle being hit from behind, generate and send a control signal to a vehicle Electrical Power Assisted Steering control unit, which Electrical Power Assisted Steering control unit, in response to receiving such a control signal, is arranged to cause the Electrical Power Assisted Steering to align the steerable wheels of the host vehicle.
- the provision to align the steerable wheels of the host vehicle during determined standstill of the host vehicle and a determined intention to turn across a lane containing oncoming traffic upon determining a high risk of the host vehicle being hit from behind is ensured that any pushing of the host vehicle as a result of the host vehicle being hit by another vehicle from behind, will only cause the vehicle to move straight forward in the current lane, and thus not turn into a lane containing oncoming traffic and potentially suffer a secondary collision therewith.
- the one or more forward-looking detection systems comprises one or more of a radar sensor, a laser sensor, a lidar sensor, an ultrasound sensor, an infrared sensor, one or several image sensors, or any combination thereof.
- the one or more rearward-looking detection systems comprises one or more of a radar sensor, a laser sensor, a lidar sensor, an ultrasound sensor, an infrared sensor, one or several image sensors, or any combination thereof.
- the one or more turning intention detection systems are arranged to determine an intention to turn across an adjacent lane from one or more parameters, such as left or right hand steering wheel movement, turning of the steerable wheels of the host vehicle, steering angle, information on the extension of the road from at least one of a camera sensor, a map data system and a navigation system.
- the provision of determining an intention to turn across an adjacent lane from one or more of the above parameters facilitates cost efficient realization of the arrangement as determination can be made using sensors that are normally already present in today's vehicles.
- the means for determining standstill are arranged to determine standstill of the host vehicle from at least one of a vehicle speed sensor, two or more vehicle speed sensors, a transmission sensor and a navigation system.
- Determining standstill of the host vehicle in this way is a simple and cost efficient manner using sensors that are normally already present in today's vehicles.
- control unit further is arranged to determine the risk of the host vehicle being hit from behind based on fused information from two or more sensors of the rearward-looking detection systems.
- Determining the risk of the host vehicle being hit from behind based on fused information from two or more sensors provides for a simple and reliable high quality determination while enabling use of reasonably priced sensors, possibly sensors that are normally already present in today's vehicles.
- control unit further is arranged to, upon determining the risk of the host vehicle being hit from behind, weight in the risk of the host vehicle being pushed into an adjacent lane containing oncoming traffic if being hit from behind.
- Weighting in the risk of the host vehicle being pushed into an adjacent lane containing oncoming traffic, if being hit from behind, provides for a risk determination that accounts also for the consequences of the host vehicle being hit from behind.
- the arrangement further comprises means for determining an intention to resume forward travel of the host vehicle, and in that the control unit further is arranged to release the aligning of the steerable wheels of the host vehicle in response to such intention to resume forward travel being determined.
- a ninth aspect is further provided a method for preventing or mitigating accidents when turning a host vehicle across lanes with oncoming traffic, the host vehicle further comprising an Electrical Power Assisted Steering operable to steer one or more wheels of the host vehicle, comprising the steps of: detecting oncoming traffic in one or more lanes adjacent to the lane travelled by the host vehicle using one or more forward-looking detection systems; detecting other vehicles approaching the host vehicle from behind using one or more rearward-looking detection systems; determining an intention to turn across an adjacent lane using one or more turning intention detection systems; determining standstill of the host vehicle using means for determining standstill of the host vehicle; arranging a control unit to, during determined standstill of the host vehicle and a determined intention to turn across a lane containing oncoming traffic, determine a risk of the host vehicle being hit from behind; and, upon determining a high risk of the host vehicle being hit from behind, generate and send a control signal to a vehicle Electrical Power Assisted Steering control unit, and arranging the Electrical Power Assisted Steer
- a motor vehicle which comprises a vehicle safety arrangement aligning the steerable wheels of the host vehicle during determined standstill of the host vehicle and a determined intention to turn across a lane containing oncoming traffic upon determining a high risk of the host vehicle being hit from behind, as described herein.
- a motor vehicle comprising a vehicle safety arrangement as described herein will provide improved safety through ensuring that any pushing of the host vehicle as a result of the host vehicle being hit by another vehicle from behind, will only cause the vehicle to move straight forward in the current lane, and thus not turn into a lane containing oncoming traffic and potentially suffer a secondary collision therewith.
- FIG 1 is a schematic illustration of a motor vehicle 1 comprising a vehicle safety arrangement according to embodiments hereof preparing to turn left at an intersection.
- the vehicle 1 hosting the vehicle safety arrangement has stopped in its lane 7 and the driver or, in the case of an autonomous vehicle, an autonomous travel control arrangement is preparing to turn left.
- the vehicle 1 hosting the arrangement further comprises an Electrical Power Assisted Steering (EPAS) 4 operable to steer one or more wheels 5 of the host vehicle 1.
- EAS Electrical Power Assisted Steering
- the vehicle safety arrangement comprises one or more forward-looking detection systems 6 for detecting oncoming traffic 3 in one or more lanes 2 adjacent to the lane 7 travelled by the host vehicle 1.
- the one or more forward-looking detection systems 6 comprises one or more of a Radio Detection And Ranging (RADAR) sensor, a Light Amplification by Stimulated Emission of Radiation (LASER) sensor, a Light Detection And Ranging (LIDAR) sensor, an ultrasound sensor, an infrared sensor, one or several image sensors, or any combination thereof.
- RADAR Radio Detection And Ranging
- LASER Light Amplification by Stimulated Emission of Radiation
- LIDAR Light Detection And Ranging
- an ultrasound sensor an infrared sensor
- infrared sensor one or several image sensors, or any combination thereof.
- At least one image sensor may be a video sensor, designed as either a Charge-Coupled Device (CCD) camera or a Complementary Metal-Oxide Semiconductor (CMOS) camera, for example. Two or more images sensors may be used for stereo vision.
- CCD Charge-Coupled Device
- CMOS Complementary Metal-Oxide Semiconductor
- the vehicle safety arrangement furthermore comprises one or more rearward-looking detection systems 8 for detecting other vehicles 9 approaching the host vehicle 1 from behind.
- the one or more rearward-looking detection systems 8 comprises one or more of a RADAR sensor, a LASER sensor, a LIDAR sensor, an ultrasound sensor, an infrared sensor, one or several image sensors, or any combination thereof.
- At least one image sensor may here also be a video sensor, designed as either a CCD camera or a CMOS camera, for example. Two or more images sensors may be used for stereo vision.
- the vehicle safety arrangement furthermore comprises one or more turning intention detection systems 10, for determining an intention of a driver of the host vehicle 1 or an autonomous travel control arrangement to turn across an adjacent lane 2.
- Intention to turn across a lane 2 containing oncoming traffic 3 is determined by the one or more turning intention detection systems 10 from one or more parameters indicative of actual vehicle conditions, such as left or right hand steering wheel movement or turning of the steerable wheels 5 of the host vehicle 1 (i.e. steering angular rate), steering angle, information on the extension of the road from at least one of a camera sensor, a map data system and a navigation system such as a GPS system or a fusion of data from any number of suitable sensors, such as those described above..
- parameters indicative of actual vehicle conditions such as left or right hand steering wheel movement or turning of the steerable wheels 5 of the host vehicle 1 (i.e. steering angular rate), steering angle, information on the extension of the road from at least one of a camera sensor, a map data system and a navigation system such as a GPS system or a fusion of data from any number of suitable sensors, such as those described above.
- the vehicle safety arrangement furthermore comprises means for determining standstill 11 of the host vehicle 1.
- the means for determining standstill 11 of the host vehicle 1, i.e. if the host vehicle 1 has stopped, are arranged to determine standstill of the host vehicle 1 from one or several vehicle speed sensors. Alternatively, the vehicle speed may also be obtained from a transmission sensor or from a navigation system such as GPS system or equivalent.
- the vehicle safety arrangement further comprises a control unit 12 arranged to, during determined standstill of the host vehicle 1 and a determined intention to turn across a lane 2 containing oncoming traffic 3, determine a risk of the host vehicle 1 being hit from behind and, upon determining a high risk of the host vehicle 1 being hit from behind, generate and send a control signal to a vehicle EPAS control unit 13, which EPAS control unit 13, in response to receiving such a control signal, is arranged to cause the EPAS 4 to align the steerable wheels 5 of the host vehicle 1 such that any pushing of the vehicle, as a result of the vehicle being hit by another vehicle 9 approaching the host vehicle 1 from behind, only will cause the host vehicle 1 to move in the current lane 7, and thus not into any lane 2 containing oncoming traffic 3.
- a control unit 12 arranged to, during determined standstill of the host vehicle 1 and a determined intention to turn across a lane 2 containing oncoming traffic 3, determine a risk of the host vehicle 1 being hit from behind and, upon determining a high risk of the host vehicle
- the control unit 12 suitably comprises a processing unit, such as a computer processor, and appropriate software for controlling operation thereof.
- control unit 12 is further arranged to determine the risk of the host vehicle 1 being hit from behind based on fused information from two or more sensors of the rearward-looking detection systems 8, which provides for a simple and reliable high quality determination.
- control unit 12 is further arranged to, upon determining the risk of the host vehicle 1 being hit from behind, weight in the risk of the host vehicle 1 being pushed into an adjacent lane 2 containing oncoming traffic 3 if being hit from behind. Weighting in the risk of the host vehicle 1 being pushed into an adjacent lane 2 containing oncoming traffic 3, if being hit from behind by another vehicle 9, provides for a risk determination that accounts also for the consequences of the host vehicle 1 being hit from behind.
- vehicle safety arrangement further comprises means 14 for determining an intention of the vehicle driver or an autonomous travel control arrangement to resume forward travel of the host vehicle 1.
- the control unit 12 is further arranged to release the aligning of the steerable wheels 5 of the host vehicle 1 in response to such intention to resume forward travel being determined. Resumption of intentional forward travel may e.g. be determined from movement of the accelerator pedal or equivalent.
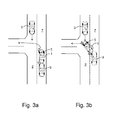
- Figure 3a is a schematic illustration of a prior-art vehicle 1 being struck from behind by another vehicle 9 when preparing to turn left at an intersection.
- the driver of the prior-art vehicle 1 when waiting to make a left turn, has turned the steerable wheels 5 of the prior-art vehicle 1 slightly left.
- Figure 4a is a schematic illustration of a motor vehicle 1 comprising a vehicle safety arrangement according to embodiments hereof being struck from behind by another vehicle 9 when preparing to turn left at an intersection.
- the driver of the host vehicle 1 or an autonomous travel control arrangement when waiting to make a left turn, may or may not have turned the steerable wheels 5 of the host vehicle 1 to the left.
- the vehicle safety arrangement will, during determined standstill of the host vehicle 1 and a determined intention to turn across the lane 2 containing oncoming traffic 3, cause the EPAS 4 to align the steerable wheels 5 of the host vehicle 1 such that any pushing of the vehicle, as a result of the vehicle being hit by the other vehicle 9 approaching the host vehicle 1 from behind, only will cause the host vehicle 1 to move in the current lane 7, and thus not into the lane 2 containing oncoming traffic 3.
- the method comprises the steps of: detecting oncoming traffic 3 in one or more lanes 2 adjacent to the lane 7 travelled by the host vehicle 1 using one or more forward-looking detection systems 6; detecting other vehicles 9 approaching the host vehicle 1 from behind using one or more rearward-looking detection systems 8; determining an intention to turn across an adjacent lane 2 using one or more turning intention detection systems 10; determining standstill of the host vehicle 1 using means for determining standstill 11 of the host vehicle 1; arranging a control unit 12 to, during determined standstill of the host vehicle 1 and a determined intention to turn across a lane 2 containing oncoming traffic 3, determine a risk of the host vehicle 1 being hit from behind; and, upon determining a high risk of the host vehicle 1 being hit from behind, generate and send a control signal to a
- the method ensures that any pushing of the host vehicle 1, as a result of the host vehicle 1 being hit by another vehicle 9 approaching the host vehicle 1 from behind, only will cause the host vehicle 1 to move in the current lane 7, and thus not into any lane 2 containing oncoming traffic 3.
- a motor vehicle 1 that comprises a vehicle safety arrangement for preventing or mitigating accidents when turning across lanes 2 with oncoming traffic 3 in a vehicle 1 hosting the arrangement, the host vehicle 1 further comprising an Electrical Power Assisted Steering 4 operable to steer one or more wheels 5 of the host vehicle 1 as described herein.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13169358.2A EP2808217B1 (de) | 2013-05-27 | 2013-05-27 | Fahrzeugsicherheitsanordnung und -verfahren |
| US14/280,854 US9349294B2 (en) | 2013-05-27 | 2014-05-19 | Vehicle safety arrangement and method |
| CN201410213449.6A CN104176116B (zh) | 2013-05-27 | 2014-05-20 | 车辆安全设备和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13169358.2A EP2808217B1 (de) | 2013-05-27 | 2013-05-27 | Fahrzeugsicherheitsanordnung und -verfahren |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2808217A1 true EP2808217A1 (de) | 2014-12-03 |
| EP2808217B1 EP2808217B1 (de) | 2019-02-27 |
Family
ID=48578791
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13169358.2A Active EP2808217B1 (de) | 2013-05-27 | 2013-05-27 | Fahrzeugsicherheitsanordnung und -verfahren |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9349294B2 (de) |
| EP (1) | EP2808217B1 (de) |
| CN (1) | CN104176116B (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2579025A (en) * | 2018-11-14 | 2020-06-10 | Jaguar Land Rover Ltd | Vehicle control system and method |
| GB2591949A (en) * | 2018-11-14 | 2021-08-11 | Jaguar Land Rover Ltd | Vehicle control system and method |
| US11718138B2 (en) | 2020-01-16 | 2023-08-08 | Honda Motor Co., Ltd. | Motorcycle |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2808217B1 (de) * | 2013-05-27 | 2019-02-27 | Volvo Car Corporation | Fahrzeugsicherheitsanordnung und -verfahren |
| US9694777B2 (en) * | 2015-06-11 | 2017-07-04 | GM Global Technology Operations LLC | Wheel assembly adjustment for vehicle events |
| DE102015211133A1 (de) * | 2015-06-17 | 2016-12-22 | Robert Bosch Gmbh | Steuern eines Kraftfahrzeugs |
| CN105365695B (zh) * | 2015-08-31 | 2018-03-02 | 珠海上富电技股份有限公司 | 泊车、盲区及后备箱开启三合一的检测系统及检测方法 |
| US10745003B2 (en) | 2015-11-04 | 2020-08-18 | Zoox, Inc. | Resilient safety system for a robotic vehicle |
| US10486707B2 (en) * | 2016-01-06 | 2019-11-26 | GM Global Technology Operations LLC | Prediction of driver intent at intersection |
| US10232848B2 (en) | 2016-01-29 | 2019-03-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Detection of left turn across path/opposite direction oncoming objects |
| JP6650635B2 (ja) * | 2016-02-29 | 2020-02-19 | パナソニックIpマネジメント株式会社 | 判定装置、判定方法、および判定プログラム |
| US10086830B2 (en) * | 2016-05-23 | 2018-10-02 | Ford Global Technologies, Llc | Accident attenuation systems and methods |
| DE102016216738A1 (de) * | 2016-09-05 | 2018-03-08 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Steuern eines Fahrzeugs |
| KR101899396B1 (ko) * | 2016-11-24 | 2018-09-18 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| EP3354525B1 (de) * | 2017-01-26 | 2021-01-13 | Volvo Car Corporation | Anordnung und verfahren zur abschwächung einer vorwärtskollision zwischen strassenfahrzeugen |
| US10338594B2 (en) * | 2017-03-13 | 2019-07-02 | Nio Usa, Inc. | Navigation of autonomous vehicles to enhance safety under one or more fault conditions |
| US10423162B2 (en) | 2017-05-08 | 2019-09-24 | Nio Usa, Inc. | Autonomous vehicle logic to identify permissioned parking relative to multiple classes of restricted parking |
| JP6900775B2 (ja) * | 2017-05-12 | 2021-07-07 | 株式会社デンソー | 車両の自動運転制御システム |
| US10369974B2 (en) | 2017-07-14 | 2019-08-06 | Nio Usa, Inc. | Control and coordination of driverless fuel replenishment for autonomous vehicles |
| US10710633B2 (en) | 2017-07-14 | 2020-07-14 | Nio Usa, Inc. | Control of complex parking maneuvers and autonomous fuel replenishment of driverless vehicles |
| US11022971B2 (en) | 2018-01-16 | 2021-06-01 | Nio Usa, Inc. | Event data recordation to identify and resolve anomalies associated with control of driverless vehicles |
| DE102020100728A1 (de) | 2020-01-14 | 2021-07-15 | Bayerische Motoren Werke Aktiengesellschaft | Abbiegeassistent für ein Fahrzeug |
| KR20250035064A (ko) * | 2023-09-04 | 2025-03-12 | 현대자동차주식회사 | 충돌로 인한 탑승자의 피해 감소 시스템 및 방법 |
| KR20250035063A (ko) * | 2023-09-04 | 2025-03-12 | 현대자동차주식회사 | 충돌로 인한 피해 감소 시스템 및 방법 |
| CN118358569B (zh) * | 2024-06-19 | 2024-10-01 | 深圳魔视智能科技有限公司 | 行车控制方法、装置、设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005005412A1 (de) * | 2005-02-05 | 2006-08-10 | Volkswagen Ag | Vorrichtung und Verfahren zur Vermeidung von Gegenverkehrsunfällen eines Fahrzeugs nach einem Heckaufprall |
| US20110054716A1 (en) * | 2008-02-15 | 2011-03-03 | Continental Teves Ag & Co Hg | Vehicle system for navigation and/or driver assistance |
| DE102011108292A1 (de) * | 2011-07-21 | 2012-04-05 | Daimler Ag | Verfahren zum Betrieb einer Fahrerassistenzvorrichtung |
| WO2013083343A1 (de) * | 2011-12-06 | 2013-06-13 | Robert Bosch Gmbh | Verfahren und system zur verminderung von unfallschäden bei einer kollision zwischen zwei fahrzeugen |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6353788B1 (en) * | 1997-12-15 | 2002-03-05 | Robert Bosch Gmbh | Method for regulating speed and distance during passing maneuvers |
| US6269308B1 (en) * | 1998-08-20 | 2001-07-31 | Honda Giken Kogyo Kabushiki Kaisha | Safety running system for vehicle |
| JP3174833B2 (ja) * | 1999-10-27 | 2001-06-11 | 建設省土木研究所長 | 右折衝突防止システム |
| JP4055656B2 (ja) * | 2003-05-30 | 2008-03-05 | トヨタ自動車株式会社 | 衝突予測装置 |
| JP4421450B2 (ja) * | 2004-11-22 | 2010-02-24 | 本田技研工業株式会社 | 車両の逸脱判定装置 |
| JP4463757B2 (ja) * | 2005-12-09 | 2010-05-19 | 株式会社小松製作所 | 車両の走行制御装置 |
| JP4518080B2 (ja) * | 2007-01-09 | 2010-08-04 | トヨタ自動車株式会社 | 周辺監視装置 |
| US8165796B2 (en) * | 2008-09-05 | 2012-04-24 | Robert Bosch Gmbh | Collision avoidance system and method |
| US7991551B2 (en) * | 2008-11-06 | 2011-08-02 | Ford Global Technologies, Llc | System and method for determining a collision status of a nearby vehicle |
| FR2940233B1 (fr) * | 2008-12-19 | 2011-01-28 | Jtekt Europe Sas | Procede de determination du taux de sous-virage d'un vehicule equipe d'une direction assistee electrique, et de correction eventuelle de l'assistance de direction |
| US20100169016A1 (en) * | 2008-12-29 | 2010-07-01 | Lakshmi Aroop Kodali | Safe side-view system for the driver when over-taking the vehicle in the front on a single lane shared road |
| US8482486B2 (en) * | 2009-04-02 | 2013-07-09 | GM Global Technology Operations LLC | Rear view mirror on full-windshield head-up display |
| US8977489B2 (en) * | 2009-05-18 | 2015-03-10 | GM Global Technology Operations LLC | Turn by turn graphical navigation on full windshield head-up display |
| US9963127B2 (en) * | 2010-01-15 | 2018-05-08 | Volvo Car Corporation | Collision mitigation system and method for braking a vehicle |
| US8527172B2 (en) * | 2010-10-20 | 2013-09-03 | GM Global Technology Operations LLC | Vehicle collision avoidance and warning system |
| DE102010061829A1 (de) * | 2010-11-24 | 2012-05-24 | Continental Teves Ag & Co. Ohg | Verfahren und Abstandskontrolleinrichtung zur Vermeidung von Kollisionen eines Kraftfahrzeugs in einer Fahrsituation mit geringem Seitenabstand |
| EP2808217B1 (de) * | 2013-05-27 | 2019-02-27 | Volvo Car Corporation | Fahrzeugsicherheitsanordnung und -verfahren |
| KR101509989B1 (ko) * | 2013-11-26 | 2015-04-07 | 현대자동차주식회사 | 차량 제동 제어 시스템 및 방법 |
-
2013
- 2013-05-27 EP EP13169358.2A patent/EP2808217B1/de active Active
-
2014
- 2014-05-19 US US14/280,854 patent/US9349294B2/en active Active
- 2014-05-20 CN CN201410213449.6A patent/CN104176116B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005005412A1 (de) * | 2005-02-05 | 2006-08-10 | Volkswagen Ag | Vorrichtung und Verfahren zur Vermeidung von Gegenverkehrsunfällen eines Fahrzeugs nach einem Heckaufprall |
| US20110054716A1 (en) * | 2008-02-15 | 2011-03-03 | Continental Teves Ag & Co Hg | Vehicle system for navigation and/or driver assistance |
| DE102011108292A1 (de) * | 2011-07-21 | 2012-04-05 | Daimler Ag | Verfahren zum Betrieb einer Fahrerassistenzvorrichtung |
| WO2013083343A1 (de) * | 2011-12-06 | 2013-06-13 | Robert Bosch Gmbh | Verfahren und system zur verminderung von unfallschäden bei einer kollision zwischen zwei fahrzeugen |
Non-Patent Citations (1)
| Title |
|---|
| "Verhalten bei drohendem Auffahrunfall - Verkehrstalk Foren", INTERNET CITATION, 10 January 2010 (2010-01-10), pages 1 - 20, XP002690334, Retrieved from the Internet <URL:http://www.verkehrsportal.de/board/index.php?showtopic=81635> [retrieved on 20130115] * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2579025A (en) * | 2018-11-14 | 2020-06-10 | Jaguar Land Rover Ltd | Vehicle control system and method |
| GB2579025B (en) * | 2018-11-14 | 2021-05-26 | Jaguar Land Rover Ltd | Vehicle control system and method for intention and submission gestures |
| GB2591949A (en) * | 2018-11-14 | 2021-08-11 | Jaguar Land Rover Ltd | Vehicle control system and method |
| GB2591949B (en) * | 2018-11-14 | 2022-04-06 | Jaguar Land Rover Ltd | Vehicle control system and method |
| US11718138B2 (en) | 2020-01-16 | 2023-08-08 | Honda Motor Co., Ltd. | Motorcycle |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2808217B1 (de) | 2019-02-27 |
| CN104176116A (zh) | 2014-12-03 |
| US20140350790A1 (en) | 2014-11-27 |
| US9349294B2 (en) | 2016-05-24 |
| CN104176116B (zh) | 2018-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9349294B2 (en) | Vehicle safety arrangement and method | |
| US10513268B2 (en) | Vehicle safety system | |
| JP6330825B2 (ja) | 車両用衝突回避支援システム | |
| US20200307573A1 (en) | Vehicle control system | |
| JP6536852B2 (ja) | 車両制御装置及び車両制御方法 | |
| JP6252365B2 (ja) | 安全確認支援システム、安全確認支援方法 | |
| US10755573B2 (en) | Collision avoidance device | |
| US11173897B2 (en) | Vehicle safety system | |
| US11220266B2 (en) | Method for at least partially unblocking a field of view of a motor vehicle during lane changes | |
| US20170101102A1 (en) | Vehicle Safety System | |
| US10882450B2 (en) | Vehicle periphery monitoring apparatus | |
| US11338801B2 (en) | Collision avoidance device | |
| CN108352117B (zh) | 车道维持控制装置 | |
| EP2484566A1 (de) | Bremshilfesystem | |
| JP2019036086A (ja) | 車両制御システムおよび車両制御方法 | |
| US10421397B2 (en) | Forward maneuvering assistance using head-up display | |
| JP2017114155A (ja) | 運転支援装置 | |
| EP2923924B1 (de) | Anordnung zur Fahrerassistenz | |
| US12397704B1 (en) | Method for automatically actuating a direction indicator and vehicle | |
| US20190077454A1 (en) | Control System for Steering a Tractor Vehicle with a Trailer | |
| CN111674456B (zh) | 提供叠加扭矩请求信号的方法和相应的装置 | |
| CN107021097A (zh) | 车辆可见性增强系统,包括该系统的车辆和增强车辆可见性的方法 | |
| EP2883743B1 (de) | Vorrichtung und Verfahren für Fahrzeuginsassenschutz beim Abkommen von der Straße | |
| JP2017073059A (ja) | 車線変更支援装置 | |
| WO2019181326A1 (ja) | 車両走行制御装置、車両走行制御システムおよび車両走行制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20130527 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| R17P | Request for examination filed (corrected) |
Effective date: 20150603 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20170713 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20180927 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1100877 Country of ref document: AT Kind code of ref document: T Effective date: 20190315 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602013051300 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190527 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190627 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190627 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190527 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190528 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1100877 Country of ref document: AT Kind code of ref document: T Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602013051300 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190531 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190531 |
|
| 26N | No opposition filed |
Effective date: 20191128 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190527 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20231212 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250423 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250423 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250423 Year of fee payment: 13 |