EP2987759B1 - Kran mit definierter Pendelbewegung bei Erreichen eines Zielorts - Google Patents
Kran mit definierter Pendelbewegung bei Erreichen eines Zielorts Download PDFInfo
- Publication number
- EP2987759B1 EP2987759B1 EP14181264.4A EP14181264A EP2987759B1 EP 2987759 B1 EP2987759 B1 EP 2987759B1 EP 14181264 A EP14181264 A EP 14181264A EP 2987759 B1 EP2987759 B1 EP 2987759B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- control device
- deflection angle
- suspension point
- load suspension
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
- B66C13/06—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads
- B66C13/063—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads electrical
Definitions
- the present invention is further based on a computer program, the computer program comprising machine code which can be processed by a control device for a crane, wherein the execution of the machine code by the control device causes the control device to operate the crane according to such a method.
- the present invention is further based on a control device for a crane, wherein the control device is programmed with such a computer program.
- Cranes often have a substantially horizontally oriented boom on which a trolley is linearly movable.
- the trolley in this case corresponds to the load suspension point of the present invention.
- the crane as a whole can also be moved.
- the direction of travel of the crane as a whole in this case usually also runs horizontally, but orthogonally to the direction of travel of the trolley.
- Such cranes can be designed in particular as container bridges.
- a pendulum movement of the load has a negative effect, in particular, when the load still oscillates at the destination where the load is to be set down. Because in this case often has to wait until the pendulum movement has subsided. Alternatively, the pendulum movement must be damped, for example by manual intervention of the crane operator in manual control mode. Both take time and therefore have a negative effect on the handling capacity.
- the object of the present invention is to provide means by which a time-optimal way a handling of loads is possible.
- the defined pendulum state can be determined as needed.
- the defined end value of the deflection angle of the pendulum motion is zero.
- the defined end value of the time derivative of the deflection angle of the oscillating movement is zero or maximum.
- the load suspension point When moving the load suspension point, starting from an initial location, the load suspension point is usually accelerated with a defined (usually the maximum possible) acceleration until the load suspension point reaches a defined (usually the maximum possible) speed. At the beginning of the acceleration process, the load rests, so does not oscillate. The braking of the load suspension point at the destination takes place in an inverse manner. In particular, in the case that both the defined final value of the deflection angle and the defined End value of the time derivative of the deflection angle are zero, therefore, in this case, it is ensured that the pendulum state of the load at the beginning of deceleration is inverse to that pendulum state, which has reached the load at the end of the acceleration process. This is readily possible because the time point at which deceleration begins can be easily calculated beforehand, and further adjusted by varying the rope length during the process to a boundary location at which the braking operation is started, the phase position of the oscillating motion can be.
- the load often first depends on an initial location of the travel movement of the load suspension point without oscillation under the load suspension point, wherein the control further accelerates the load suspension point by driving the drive from the initial location with a predetermined acceleration to the destination until the load suspension point with a predetermined speed, and the controller then reduces the acceleration to zero.
- the control device it is possible, in particular, for the control device to determine the initial deflection angle of the pendulum movement and / or the initial derivation of the deflection angle of the pendulum movement on the basis of the predetermined acceleration and the predetermined speed as well as the cable length during the acceleration.
- the control device reduces the rope length to the initial rope length, in which case the control device takes into account the reduction the rope length in determining the initial deflection angle of the pendulum motion and / or the initial derivative of the deflection angle of the pendulum motion.
- control device continuously detects the deflection angle of the pendulum movement and / or the time derivative of the deflection angle of the pendulum movement and continuously determines the time course of the cable length.
- the load suspension point on a boom of the crane by means of a trolley in a travel direction is movable.
- the vertical plane to which the pendulum movement of the load is related therefore, can in particular be parallel to the direction of travel. If it is possible in addition to the method of the trolley in the direction of travel to move the crane as a whole orthogonal to the direction of travel of the trolley, alternatively, the vertical plane to which the pendulum movement of the load is related, orthogonal to the direction of travel.
- control device determines the time course of the cable length, taking into account the changed movement of the load suspension point.
- the object is further achieved by a computer program having the features of claim 11.
- the execution of the computer program causes the control device to operate the crane in accordance with a method according to the invention.
- control device for a crane having the features of claim 12.
- control device is programmed with a computer program according to the invention.
- the object is further achieved by a crane having the features of claim 13.
- the control device of the crane is designed according to the invention.
- a crane 1 has a load suspension point 2.
- the load suspension point 2 for example, as shown in the 1 and 2 be arranged on a trolley 3, which is movable on a boom 4 of the crane 1 in a direction of travel.
- the method of the trolley 3 by means of a Katzantriebs 3 '.
- a cable system 5 runs to a load 6.
- the load 6 is suspended via the cable system 5 at the load suspension point 2.
- a rope length L of the cable system 5 By adjusting a rope length L of the cable system 5, the load 6 can be raised and lowered.
- the adjustment of the rope length L by means of a hoist 5 '.
- the crane 1 as a whole is movable orthogonally to the direction of travel of the trolley 3.
- the method of the crane 1 as a whole is done by means of a crane drive 1 '.
- the crane 1 is controlled by a control device 7.
- the control device 7 is generally designed as a software programmable control device.
- the design of the control device 7 is effected in this case by a computer program 8, with which the control device 7 is programmed.
- the computer program 8 comprises machine code 9, which can be processed by the control device 7.
- the execution of the machine code 9 by the control device 7 causes the control device 7 operates the crane 1.
- the processing of the machine code 9 by the control device 7 initially causes the normal handling of the load 6 or the normal operation of the crane 1, as in the prior art also. In addition, however, the processing of the machine code 9 by the control device 7 additionally causes the control device 7 to operate the crane 1 during the loading of the load 6 according to a method for influencing a pendulum movement of the load 6, which will be explained in more detail below.
- the computer program 8 can be supplied to the control device 7 in any desired manner. As shown in the 1 and 2 the supply of the computer program 8 via a data carrier 10, on which the computer program 8 in machine-readable form - for example, in electronic form - is deposited.
- the data carrier 10 can as shown in the 1 and 2 be designed for example as a USB memory stick. However, other embodiments are possible as well.
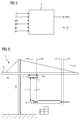
- FIG. 3 Before going into the present invention as such will be discussed in more detail below, first in conjunction with FIG. 3 explains the physical principles in more detail.
- the case is considered that the trolley 3 in its Moving direction is moved and the crane 1 is not moved as a whole in its direction of travel.
- the corresponding embodiments can be transferred analogously to a method of the crane 1 as a whole in its direction of travel.
- ⁇ denotes the deflection angle of the load 6 from a vertical plane 11 which contains the load suspension point 2 and within which the load 6 oscillates.
- the vertical plane 11 runs in the case outlined, in which the trolley 3 is moved, parallel to the direction of travel of the trolley 3. This plane is in FIG. 2 dashed lines.
- the vertical plane 11 could be orthogonal to the travel direction of the trolley 3. This level is in FIG. 1 dashed lines.
- Equations 7 and 8 first show the characteristic eigenvalue of the pendulum oscillation, that is, the oscillation frequency f.
- the oscillation frequency f the characteristic eigenvalue of the pendulum oscillation.
- the first time derivative ⁇ of the pendulum angle ⁇ thus has a value different from zero.
- the goal of the prior art approaches is always to suppress or dampen oscillations.
- the pendulum movement during the process of the load suspension point 2 does not matter.
- the load 6 can therefore oscillate throughout the process of the load suspension point 2. All that is decisive is that at a destination to which the control device 7 the load suspension point 2 and thus (as far as the horizontal position is concerned) moves the load 6, the pendulum motion comes to a standstill again.
- the control device 7 In the context of the method, the control device 7 according to the FIG. 4 and 5 an initial cable length L0, a target cable length L1 to be reached at the destination and an initial deflection angle ⁇ 0 of the pendulum movement of the load 6 and / or an initial derivative ⁇ 0 of the deflection angle ⁇ of the pendulum motion.
- the initial values ⁇ 0 and ⁇ 0 can be used as be given absolute values. As a rule, they are given as relative quantities, ie in terms of amplitudes.
- a final value ⁇ 1 is known, which the deflection angle ⁇ should assume at the destination.
- the controller 7 is aware of a final value ⁇ 1, which the time derivative ⁇ of the deflection angle ⁇ is to assume at the destination.
- the end values ⁇ 1, ⁇ 1 can be known to the control device 7 as such, for example on the basis of the computer program 8.
- the end values ⁇ 1, ⁇ 1 of the control device 7 can be obtained, for example, from a user 12 of the crane 1 (see FIG 1 and 2 ).
- the final values ⁇ 1 and ⁇ 1 can be given as absolute values.
- control device 7 is further given the time course of the movement xK of the load suspension point 2.
- the control device 7 determines the time profile of the rope length L such that at the destination of the deflection angle ⁇ of the pendulum movement takes the defined final value ⁇ 1 and / or the time derivative ⁇ of the deflection angle ⁇ the defined final value ⁇ 1 assumes.
- the control device 7 sets the cable length L in accordance with the determined time profile of the cable length L.
- the time course of the movement xK of the load suspension point 2 is not specified.
- the control device 7 also determines the time course of the movement xK of the load suspension point 2 ⁇ of the pendulum movement assumes the defined final value ⁇ 1 and / or the time derivative ⁇ of the deflection angle ⁇ assumes the defined final value ⁇ 1 .
- the control device 7 moves the load suspension point 2 in accordance with the time course determined for the load suspension point 2 and continues to adjust the cable length L during the process of the load suspension point 2 in accordance with the time profile determined for the cable length L.
- the present invention is explained on the assumption that the defined final value ⁇ 1 of the deflection angle ⁇ of the pendulum motion is zero and also the defined final value ⁇ 1 of the time derivative ⁇ of the deflection angle ⁇ of the pendulum motion is zero.
- the defined final values ⁇ 1, ⁇ 1 could also have other sizes.
- the defined final value ⁇ 1 of the deflection angle ⁇ of the pendulum motion could be zero and the defined final value ⁇ 1 of the time derivative ⁇ of the deflection angle ⁇ of the pendulum motion could be maximal, ie have its maximum value and point in the same direction as that in which the travel movement of the load suspension point 2 is directed.
- Other values are possible.
- the load 6 may be formed as needed.
- the load 6 may be a spreader with or without a container received by the spreader.
- it may be, for example, a full or empty gripper act for handling bulk goods.
- Other embodiments of the load 6 are possible.
- the load suspension point 2 is at an initial location x0 at the time when the method according to the invention is carried out.
- the load suspension point 2 is already moved at a constant speed v.
- the speed v should be maintained until the load suspension point 2 reaches a location x1 (hereinafter referred to as a boundary location).
- the load suspension point 2 is to be decelerated to a standstill with a constant delay.
- the load suspension point 2 has come to a standstill, it will continue to travel to the destination x2.
- end values ⁇ 1, ⁇ 1 for the deflection angle ⁇ and the time derivative ⁇ of the deflection angle ⁇ zero is given in each case.
- the pendulum movement of the load 6 has an initial deflection angle ⁇ 0 and an initial time derivative ⁇ 0 of the deflection angle ⁇ .
- the initial rope length L0 at the initial location x0 shall also be given at the border location x1 and at the destination x2.
- the rope length L can be kept unchanged.
- the cable length L can therefore be shortened from the initial cable length L0 to an intermediate value or extended to another intermediate value at a change location x3, for example, so that the load 6 oscillates at a frequency which is greater or less than before.
- the rope length L is then set back to the initial rope length L0. The load 6 shuttles from the further change location x4 again with the same frequency as before the change location x3.
- the change locations x3 and x4 and the change of the rope length L can be selected as required. As a rule, it is only important to set the phase position of the pendulum motion accordingly. Preferably, as far as possible, the change locations x3 and x4 are set so that the rope length L is reduced while the load 6 is at an extreme of its pendulum motion and the rope length L is increased while the load 6 is in one Zero crossing of their pendulum motion is located.
- Example 2 is based on Example 1. The difference is that according to Example 2, the load 6 initially hangs without swinging under the stationary load suspension point 2. Then, the load 6 from the control device 7 by driving of the cat drive 3 'with a predetermined acceleration to the destination x2 to be accelerated until it reaches the constant speed v. Then, the controller 7 reduces the acceleration of the load suspension point 2 to zero.
- Example 2 The solution is completely analogous to Example 1. It only need to be determined by the equation of motion of the initial deflection angle ⁇ 0 the pendulum motion and the initial time derivative ⁇ 0 of the deflection angle ⁇ of the pendulum movement, which has the load 6, when the acceleration of the load suspension point 2 reduces to zero becomes. Furthermore, the associated initial location x0 must be determined.
- Example 3 is based on Example 1. The difference is that according to Example 3, the control device 7 is additionally given a rope speed with which the rope length L before the destination x2 - for example, from the border location x1 - is to be increased to a target rope length L1 (the load 6 are thus lowered should).
- Example 1 For the equation of motion is universal and also covers the case that the rope length L changes.
- the control device 7 determines on the basis of the time course of the movement of the load suspension point 2, the initial rope length L0 and the target rope length L1 another border location x1 '. From reaching the further border location x1 ', the control device 7 increases the rope length L with the rope speed to the target rope length L1.
- Example 4 is based on Example 2. The difference is that according to example 4, during the acceleration of the load suspension point 2 by driving the hoist 5 ', the control device 7 reduces the rope length L to the initial rope length L0. In this case, the control device 7 takes into account the reduction of the rope length L in the determination of the initial deflection angle ⁇ 0 of the pendulum movement and / or the initial derivative ⁇ 0 of the deflection angle ⁇ of the pendulum movement. Again, the consideration is readily possible because the equation of motion is universal.
- the load suspension point 2 is at the starting point x0 at the time when the method according to the invention is carried out.
- the load suspension point 2 is already moved at the constant speed v.
- the speed v should be maintained until the load suspension point 2 reaches a location x1 to be determined (hereinafter referred to again as a boundary location). Thereafter, the load suspension point 2 is to be decelerated to a standstill with a constant delay. Until the load suspension point 2 has come to a standstill, it will continue to travel to the destination x2.
- the rope length L should be maintained at its original value L0. From the limit location x1, the rope length L is to be increased from its original value L0 to a target rope length L1. The lengthening of the rope length L should take place between the border location x1 and the destination x2 with a constant rope speed.
- the control device 7 is therefore able to provisionally determine the border location x1 and to determine the pendulum state at the border location x1, starting from the initial location x0 and the pendulum state given there.
- the provisional determination of the border town x1 can be more or less arbitrary. For example, when setting the boundary location x1, it can be assumed that the deceleration of the load suspension point 2 and / or the cable speed vL assume their maximum values.
- control device 7 starting from the boundary location x1 taking into account the (negative) acceleration of the load suspension point 2 and the (positive) change of the rope length L to determine the pendulum state at the destination x2.
- the resulting pendulum state of the load 6 - ie its deflection angle ⁇ and its temporal change ⁇ - at the destination x2 of the predetermined, defined end values ⁇ 1, ⁇ 1 will be different.
- the control device 7 can therefore due to the resulting deviations the border location redetermine x1 and determine again for the newly determined border location x1 which pendulum state of the load 6 results at the destination x2.
- the correct border location x1 can be quickly determined by a few iterations.
- Example 6 is based on Example 5. The difference is that, according to example 6, the load 6 initially hangs below the stationary load suspension point 2 without oscillation. Then, the load 6 is to be accelerated by the control device 7 by driving the Katzantriebs 3 'with a predetermined acceleration to the destination x2 until it reaches the constant speed v. Then, the controller 7 reduces the acceleration of the load suspension point 2 to zero.
- Example 5 The solution is completely analogous to Example 5. It is only necessary to determine from the equation of motion the initial deflection angle ⁇ of the pendulum motion and the initial time derivative ⁇ of the deflection angle ⁇ of the pendulum movement which the load 6 has when the acceleration of the load suspension point 2 is reduced to zero , Furthermore, the associated initial location x0 must be determined.
- Example 7 is based on Example 6. The difference with example 6 is that according to example 7 the control device 7 reduces the rope length L to the initial rope length L0 during the acceleration of the load suspension point 2 by activating the hoist 5 '. In this case, the control device 7 takes into account the reduction of the rope length L in the determination of the initial deflection angle ⁇ 0 of the pendulum movement and / or the initial derivative ⁇ 0 of the deflection angle ⁇ of the pendulum movement. Again, the consideration is readily possible because the equation of motion is universal.
- control device 7 is able, in the case that the time course of the movement of the load suspension point 2 is given to determine the time course of the rope length L continuously - ie in real time. Likewise, the control device 7 in the case that the time course of the movement of the load suspension point 2 is not given, able to determine the time course of the movement of the load suspension point 2 and the time course of the rope length L continuously - ie in real time.
- a regulation is particularly useful if the start of the load suspension point 2 takes place manually from standstill and then transferred to an automated process to destination x2.
- the traversing movements of the load suspension point 2 and the determination of the rope length L can also be calculated using the equation of motion using mathematical optimization methods.
- a numerical algorithm searches for the best solution according to a predetermined optimization criterion (for example, time-optimal or energy-optimal) and taking into account boundary conditions such as maximum possible speeds and accelerations, obstacles to be avoided, and the like.
- the corresponding detection device 13 for detecting the pendulum state of the load 6, that is, data that is characteristic of the deflection angle ⁇ of the cable system 5 and / or at least a time derivative ⁇ of the deflection angle ⁇ - for example, the angular velocity or the angular acceleration - can be formed as needed be.
- data that is characteristic of the deflection angle ⁇ of the cable system 5 and / or at least a time derivative ⁇ of the deflection angle ⁇ - for example, the angular velocity or the angular acceleration -
- FIGS 1 and 2 By means of stationary cameras, images are acquired, by the evaluation of which the deflection angle ⁇ and / or its time derivative ⁇ can be determined.
- the control device 7 determines the time course of the rope length L, taking into account the changed movement of the load suspension point 2 new.
- the control device 7 determines the time profile of the cable length L such that the defined final value ⁇ 1, ⁇ 1 of the deflection angle ⁇ and the time derivative ⁇ of the deflection angle ⁇ are approximated as far as possible.
- the control device 7 determines in such a case, the time course of the rope length L such that the energy the unavoidable residual pendulum movement is as low as possible.
- the control means 7 are an initial rope length L0, a target rope length L1 to be reached at the destination x2 and an initial deflection angle ⁇ 0 of a pendulum movement which the load 6 moves during the process of the load suspension point 2 to the destination x2 in a vertical plane 11 containing the load suspension point 2 performs the load suspension point 2, and / or given an initial derivative ⁇ of the deflection angle ⁇ of the pendulum motion.
- the control device 7 determines at a given time course of the movement of the load suspension point 2 a time course of the rope length L and adjusts the rope length L according to the determined time course. The determination is made such that at the destination x2 the deflection angle ⁇ of the pendulum movement and / or the time derivative ⁇ of the deflection angle ⁇ of the pendulum motion assume a defined final value ⁇ 1, ⁇ 1 .
- the present invention has many advantages.
- the method according to the invention can be integrated directly into the crane control. All required system parameters and sensor information are known in the crane control. Above all, however, the traversing movement of the load suspension point 2 can be determined to a considerable extent independently of a pendulum movement of the load 6 caused thereby. An oscillation of the load 6 during the process of the load suspension point 2 can be accepted. It only has to be ensured that the desired pendulum state is reached at the end point of the movement of the load suspension point 2, that is to say at the destination x2. This can be achieved by adjusting the rope length L during the process of the load suspension point 2.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control And Safety Of Cranes (AREA)
Description
- Die vorliegende Erfindung geht aus von einem Verfahren zum Verfahren einer Last mittels eines Krans, wobei die Last über ein Seilsystem des Krans an einem Lastaufhängepunkt des Krans aufgehängt ist,
- wobei eine Steuereinrichtung des Krans durch Ansteuern eines Antriebs den Lastaufhängepunkt zu einem Zielort verfährt,
- wobei die Steuereinrichtung während des Verfahrens des Lastaufhängepunkts durch Ansteuern eines Hubwerks eine Seillänge des Seilsystems einstellt.
- Die vorliegende Erfindung geht weiterhin aus von einem Computerprogramm, wobei das Computerprogramm Maschinencode umfasst, der von einer Steuereinrichtung für einen Kran abarbeitbar ist, wobei die Abarbeitung des Maschinencodes durch die Steuereinrichtung bewirkt, dass die Steuereinrichtung den Kran gemäß einem derartigen Verfahren betreibt.
- Die vorliegende Erfindung geht weiterhin aus von einer Steuereinrichtung für einen Kran, wobei die Steuereinrichtung mit einem derartigen Computerprogramm programmiert ist.
- Die vorliegende Erfindung geht weiterhin aus von einem Kran,
- wobei der Kran einen Lastaufhängepunkt aufweist, an dem über ein Seilsystem des Krans eine Last aufgehängt ist,
- wobei der Kran mindestens einen Antrieb aufweist, mittels dessen der Lastaufhängepunkt in einer Verfahrrichtung verfahrbar ist,
- wobei der Kran ein Hubwerk aufweist, mittels dessen eine Seillänge des Seilsystems einstellbar ist,
- wobei der Kran eine derartige Steuereinrichtung aufweist.
- Die genannten Gegenstände sind allgemein bekannt.
- Zum Umschlagen von Lasten - beispielsweise zwischen zwei der Komponenten Schiff, Lastkraftwagen, Eisenbahnwaggon, Container- oder sonstiges Lager usw. werden oftmals Krane eingesetzt.
- Krane weisen oftmals einen im Wesentlichen horizontal orientierten Ausleger auf, auf dem eine Laufkatze linear verfahrbare ist. Die Laufkatze entspricht in diesem Fall dem Lastaufhängepunkt der vorliegenden Erfindung. Es kann ferner oftmals der Kran als Ganzes ebenfalls verfahrbar sein. Die Verfahrrichtung des Kranes als Ganzes verläuft in diesem Fall in der Regel ebenfalls horizontal, jedoch orthogonal zur Verfahrrichtung der Laufkatze. Derartige Krane können insbesondere als Containerbrücken ausgebildet sein.
- Beim Umschlagen der Last treten oftmals Pendelbewegungen der Last auf, deren (vertikale) Pendelebene parallel zur Verfahrrichtung der Laufkatze verläuft. Im Stand der Technik ist bekannt, die Auslenkung der Last (Pendelwinkel) beispielsweise mittels eines Kamerasystems zu erfassen und durch eine geeignete Bewegung des Lastaufhängepunkts (= Laufkatze) dämpfend zu beeinflussen. Eine derartige Vorgehensweise ist eine echte Regelung, welche sowohl Schwingungen aufgrund aktiver Verfahrbewegungen des Krans oder der Laufkatze und als auch Schwingungen aufgrund von einer äußeren Anregung wie beispielsweise Wind dämpft. Sie ist im Stand der Technik als sogenannte sway control bekannt.
- Im Stand der Technik ist weiterhin bekannt, durch eine geeignete Profilgebung von Führungsgrößen insbesondere der Laufkatze die Anregung von Pendelbewegungen zu vermeiden bzw. zumindest zu minimieren. Diese Vorgehensweise ist im Stand der Technik als sogenanntes input shaping bekannt. Eine derartige Vorgehensweise ist eine Steuerung, mittels derer Schwingungen aufgrund aktiver Verfahrbewegungen der Laufkatze gedämpft werden können, nicht aber Schwingungen aufgrund von äußeren Anregungen.
- Eine Pendelbewegung der Last wirkt sich insbesondere dann negativ aus, wenn die Last am Zielort, an dem die Last abgesetzt werden soll, noch pendelt. Denn in diesem Fall muss oftmals abgewartet werden, bis die Pendelbewegung abgeklungen ist. Alternativ muss die Pendelbewegung beispielsweise durch manuelles Eingreifen des Kranführers im Handsteuerbetrieb gedämpft werden. Beides benötigt Zeit und wirkt sich daher negativ auf die Umschlagleistung aus.
- Aus der
US 2012/0 234 787 A1 ist ein spezielles Verfahren des Input shaping bekannt. Bei diesem Verfahren wird in Abhängigkeit von der Seillänge und deren Änderung in Verbindung mit einem Auslenkwinkel einer Pendelbewegung der Last und den zeitlichen Ableitungen der Pendelbewegung ein Beschleunigungsverlauf während einer Beschleunigungs- oder Verzögerungsphase ermittelt. Die Ermittlung erfolgt derart, dass am Ende der jeweiligen Beschleunigungs- oder Verzögerungsphase der Auslenkwinkel der Pendelbewegung zu null wird. Bei diesem Verfahren wird implizit vorausgesetzt, dass zu Beginn der jeweiligen Beschleunigungs- oder Verzögerungsphase die Last noch keine Pendelbewegung relativ zum Lastaufhängepunkt ausführt. Bei derUS 2012/0 234 787 A1 wird somit insbesondere vorausgesetzt, dass die Last während der Phasen, während derer der Lastaufhängepunkt steht oder mit konstanter Geschwindigkeit bewegt wird, nicht pendelt. - Die Aufgabe der vorliegenden Erfindung besteht darin, Möglichkeiten zu schaffen, mittels derer auf zeitoptimale Weise ein Umschlagen von Lasten möglich ist.
- Die Aufgabe wird durch ein Verfahren mit den Merkmalen des Anspruchs 1 gelöst. Vorteilhafte Ausgestaltungen des erfindungsgemäßen Verfahrens sind Gegenstand der abhängigen Ansprüche 2 bis 10.
- Erfindungsgemäß wird ein Verfahren der eingangs genannten Art dadurch ausgestaltet,
- dass der Steuereinrichtung eine anfängliche Seillänge, eine am Zielort zu erreichende Ziel-Seillänge sowie ein anfänglicher Auslenkwinkel einer Pendelbewegung, welche die Last während des Verfahrens des Lastaufhängepunkts zum Zielort in einer den Lastaufhängepunkt enthaltenden vertikalen Ebene um den Lastaufhängepunkt ausführt, und/oder eine anfängliche Ableitung des Auslenkwinkels der Pendelbewegung gegeben sind und
- dass die Steuereinrichtung bei gegebenem zeitlichem Verlauf der Verfahrbewegung des Lastaufhängepunkts einen zeitlichen Verlauf der Seillänge derart ermittelt und einstellt, dass am Zielort ein Auslenkwinkel der Pendelbewegung und/oder eine zeitliche Ableitung des Auslenkwinkels der Pendelbewegung einen definierten Endwert annehmen.
- Erfindungsgemäß wird also weder die Anregung einer Pendelbewegung unterdrückt noch während des Verfahrens der Last zu ihrem Zielort eine angeregte Pendelbewegung gedämpft. Stattdessen wird dafür gesorgt, dass die Last ihren Zielort mit einem definierten Pendelzustand (= definierter Endwert des Auslenkwinkels und/oder der zeitlichen Ableitung des Auslenkwinkels) erreicht.
- Der definierte Pendelzustand kann nach Bedarf bestimmt sein. In der Regel ist der definierte Endwert des Auslenkwinkels der Pendelbewegung Null. Alternativ oder zusätzlich ist in der Regel der definierte Endwert der zeitlichen Ableitung des Auslenkwinkels der Pendelbewegung Null oder maximal.
- Beim Verfahren des Lastaufhängepunkts wird in der Regel, ausgehend von einem Anfangsort, der Lastaufhängepunkt mit einer definierten (meist der maximal möglichen) Beschleunigung beschleunigt, bis der Lastaufhängepunkt eine definierte (meist die maximal mögliche) Geschwindigkeit erreicht. Zu Beginn des Beschleunigungsvorgangs ruht die Last, pendelt also nicht. Das Abbremsen des Lastaufhängepunkts am Zielort erfolgt auf inverse Weise. Insbesondere in dem Fall, dass sowohl der definierte Endwert des Auslenkwinkels als auch der definierte Endwert der zeitlichen Ableitung des Auslenkwinkels Null sind, wird daher in diesem Fall dafür gesorgt, dass der Pendelzustand der Last zu Beginn des Abbremsens invers zu demjenigen Pendelzustand ist, den die Last am Ende des Beschleunigungsvorgangs erreicht hat. Dies ist ohne weiteres möglich, da der Zeitpunkt, zu dem mit dem Abbremsen begonnen wird, ohne weiteres vorher berechnet werden kann und weiterhin durch Variieren der Seillänge während des Verfahrens zu einem Grenzort, an dem mit dem Bremsvorgang begonnen wird, die Phasenlage der Pendelbewegung eingestellt werden kann.
- Eine mögliche Ausgestaltung der vorliegenden Erfindung besteht darin,
- dass der Steuereinrichtung zusätzlich eine Seilgeschwindigkeit, mit der die Seillänge vor dem Zielort erhöht werden soll, gegeben ist,
- dass die Steuereinrichtung anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts, der anfänglichen Seillänge, der Ziel-Seillänge und der Seilgeschwindigkeit einen Grenzort bestimmt,
- dass die Steuereinrichtung ab dem Erreichen des Grenzorts die Seillänge mit der Seilgeschwindigkeit auf die Ziel-Seillänge erhöht,
- dass die Steuereinrichtung anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts vom Grenzort zum Zielpunkt, der Seilgeschwindigkeit, der Ziel-Seillänge und des definierten Endwerts des Auslenkwinkels und/oder des definierten Endwerts der zeitlichen Ableitung des Auslenkwinkels für den Grenzort einen Zwischenwert des Auslenkwinkels und/oder der zeitlichen Ableitung des Auslenkwinkels ermittelt und
- dass die Steuereinrichtung anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts bis zum Grenzort, der anfänglichen Seillänge, des anfänglichen Auslenkwinkels der Pendelbewegung und/oder der anfänglichen Ableitung des Auslenkwinkels der Pendelbewegung den zeitlichen Verlauf der Seillänge bis zum Erreichen des Grenzorts derart bestimmt, dass am Grenzort der Auslenkwinkel der Pendelbewegung und/oder die zeitliche Ableitung des Auslenkwinkels der Pendelbewegung den ermittelten Zwischenwert annehmen.
- Eine alternative Ausgestaltung der vorliegenden Erfindung besteht darin,
- dass die Steuereinrichtung anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts, der anfänglichen Seillänge, der Ziel-Seillänge, des anfänglichen Auslenkwinkels der Pendelbewegung und/oder der anfänglichen zeitlichen Ableitung des Auslenkwinkels der Pendelbewegung einen Grenzort ermittelt,
- dass die Steuereinrichtung ab dem Grenzort die Seillänge entweder mit einer mittleren Seilgeschwindigkeit oder mit einer um die mittlere Seilgeschwindigkeit oszillierenden Seilgeschwindigkeit erhöht,
- dass die mittlere Seilgeschwindigkeit durch die Differenz der Ziel-Seillänge und der anfänglichen Seillänge, dividiert durch die zum Verfahren des Lastaufhängepunkts vom Grenzort zum Zielort benötigte Zeit, gegeben ist und
- dass die Steuereinrichtung den Grenzort derart ermittelt, dass am Zielort der Auslenkwinkel der Pendelbewegung und/oder die zeitliche Ableitung des Auslenkwinkels der Pendelbewegung den definierten Endwert annehmen.
- Wie bereits erwähnt, hängt die Last oftmals zunächst an einem Anfangsort der Verfahrbewegung des Lastaufhängepunkts ohne Pendeln unter dem Lastaufhängepunkt, wobei weiterhin die Steuereinrichtung den Lastaufhängepunkt durch Ansteuern des Antriebs ausgehend vom Anfangsort mit einer vorbestimmten Beschleunigung auf den Zielort zu beschleunigt, bis der Lastaufhängepunkt mit einer vorbestimmten Geschwindigkeit verfahren wird, und die Steuereinrichtung sodann die Beschleunigung auf Null reduziert. In diesem Fall ist es insbesondere möglich, dass die Steuereinrichtung den anfänglichen Auslenkwinkel der Pendelbewegung und/oder die anfängliche Ableitung des Auslenkwinkels der Pendelbewegung anhand der vorbestimmten Beschleunigung und der vorbestimmten Geschwindigkeit sowie der Seillänge während der Beschleunigung ermittelt.
- Es ist möglich, dass die Steuereinrichtung während des Beschleunigens des Lastaufhängepunkts durch Ansteuern des Hubwerks die Seillänge auf die anfängliche Seillänge reduziert in diesem Fall berücksichtigt die Steuereinrichtung die Reduzierung der Seillänge bei der Ermittlung des anfänglichen Auslenkwinkels der Pendelbewegung und/oder der anfänglichen Ableitung des Auslenkwinkels der Pendelbewegung.
- Es ist möglich, das erfindungsgemäße Verfahren rein gesteuert auszuführen. Vorzugsweise jedoch ist vorgesehen, dass die Steuereinrichtung während des Verfahrens des Lastaufhängepunkts kontinuierlich den Auslenkwinkel der Pendelbewegung und/oder die zeitliche Ableitung des Auslenkwinkels der Pendelbewegung erfasst und den zeitlichen Verlauf der Seillänge kontinuierlich bestimmt.
- In der Regel ist der Lastaufhängepunkt auf einem Ausleger des Krans mittels einer Laufkatze in einer Verfahrrichtung verfahrbar. Die vertikale Ebene, auf welche die Pendelbewegung der Last bezogen ist, kann daher insbesondere parallel zur Verfahrrichtung verlaufen. Falls es zusätzlich zum Verfahren der Laufkatze in Verfahrrichtung möglich ist, den Kran als Ganzes orthogonal zur Verfahrrichtung der Laufkatze zu verfahren, kann alternativ die vertikale Ebene, auf welche die Pendelbewegung der Last bezogen ist, orthogonal zur Verfahrrichtung verlaufen.
- Es ist möglich, dass der zeitliche Verlauf der Verfahrbewegung des Lastaufhängepunkts während des Verfahrens des Lastaufhängepunkts geändert wird. In diesem Fall bestimmt die Steuereinrichtung den zeitlichen Verlauf der Seillänge unter Berücksichtigung der geänderten Verfahrbewegung des Lastaufhängepunkts neu.
- Die Aufgabe wird weiterhin durch ein Computerprogramm mit den Merkmalen des Anspruchs 11 gelöst. Erfindungsgemäß bewirkt die Abarbeitung des Computerprogramms, dass die Steuereinrichtung den Kran gemäß einem erfindungsgemäßen Verfahren betreibt.
- Die Aufgabe wird weiterhin durch eine Steuereinrichtung für einen Kran mit den Merkmalen des Anspruchs 12 gelöst. Erfindungsgemäß ist die Steuereinrichtung mit einem erfindungsgemäßen Computerprogramm programmiert.
- Die Aufgabe wird weiterhin durch einen Kran mit den Merkmalen des Anspruchs 13 gelöst. Erfindungsgemäß ist die Steuereinrichtung des Krans erfindungsgemäß ausgebildet.
- Die oben beschriebenen Eigenschaften, Merkmale und Vorteile dieser Erfindung sowie die Art und Weise, wie diese erreicht werden, werden klarer und deutlicher verständlich im Zusammenhang mit der folgenden Beschreibung der Ausführungsbeispiele, die in Verbindung mit den Zeichnungen näher erläutert werden. Hierbei zeigen in schematischer Darstellung:
- FIG 1
- einen Kran von der Seite,
- FIG 2
- den Kran von
FIG 1 von vorne, - FIG 3
- den Kran der
FIG 1 und 2 schematisch von der Seite, - FIG 4
- eine Steuereinrichtung,
- FIG 5
- eine weitere Steuereinrichtung und
- FIG 6 bis 10
- Beispiele von Verfahrbewegungen einer Last.
- Gemäß den
FIG 1 und 2 weist ein Kran 1 einen Lastaufhängepunkt 2 auf. Der Lastaufhängepunkt 2 kann beispielsweise entsprechend der Darstellung in denFIG 1 und 2 an einer Laufkatze 3 angeordnet sein, die auf einem Ausleger 4 des Krans 1 in einer Verfahrrichtung verfahrbar ist. Das Verfahren der Laufkatze 3 erfolgt mittels eines Katzantriebs 3'. Ausgehend vom Lastaufhängepunkt 2 verläuft ein Seilsystem 5 zu einer Last 6. Die Last 6 ist über das Seilsystem 5 am Lastaufhängepunkt 2 aufgehängt. Durch Einstellen einer Seillänge L des Seilsystems 5 kann die Last 6 angehoben und abgesenkt werden. Das Einstellen der Seillänge L erfolgt mittels eines Hubwerks 5'. In vielen Fällen ist weiterhin der Kran 1 als Ganzes orthogonal zur Verfahrrichtung der Laufkatze 3 verfahrbar. - Das Verfahren des Krans 1 als Ganzes erfolgt mittels eines Kranantriebs 1'.
- Der Kran 1 wird von einer Steuereinrichtung 7 gesteuert. Die Steuereinrichtung 7 ist in der Regel als softwareprogrammierbare Steuereinrichtung ausgebildet. Die Ausbildung der Steuereinrichtung 7 wird in diesem Fall durch ein Computerprogramm 8 bewirkt, mit dem die Steuereinrichtung 7 programmiert ist. Das Computerprogramm 8 umfasst Maschinencode 9, der von der Steuereinrichtung 7 abarbeitbar ist. Die Abarbeitung des Maschinencodes 9 durch die Steuereinrichtung 7 bewirkt, dass die Steuereinrichtung 7 den Kran 1 betreibt.
- Die Abarbeitung des Maschinencodes 9 durch die Steuereinrichtung 7 bewirkt zunächst den normalen Umschlag der Last 6 bzw. den normalen Betrieb des Krans 1, wie im Stand der Technik auch. Weiterhin bewirkt die Abarbeitung des Maschinencodes 9 durch die Steuereinrichtung 7 jedoch zusätzlich, dass die Steuereinrichtung 7 den Kran 1 während des Umschlagens der Last 6 gemäß einem Verfahren zur Beeinflussung einer Pendelbewegung der Last 6 betreibt, das nachstehend näher erläutert wird.
- Das Computerprogramm 8 kann der Steuereinrichtung 7 auf beliebige Weise zugeführt werden. Gemäß der Darstellung in den
FIG 1 und 2 erfolgt die Zuführung des Computerprogramms 8 über einen Datenträger 10, auf dem das Computerprogramm 8 in maschinenlesbarer Form - beispielsweise in elektronischer Form - hinterlegt ist. Der Datenträger 10 kann entsprechend der Darstellung in denFIG 1 und 2 beispielsweise als USB-Memorystick ausgebildet sein. Es sind jedoch ebenso andere Ausgestaltungen möglich. - Bevor auf die vorliegende Erfindung als solche näher eingegangen wird, werden nachstehend zunächst in Verbindung mit
FIG 3 die physikalischen Grundlagen näher erläutert. Hierbei wird, soweit es die Bewegung des Lastaufhängepunkts 2 betrifft, der Fall betrachtet, dass die Laufkatze 3 in ihrer Verfahrrichtung verfahren wird und der Kran 1 als Ganzes in seiner Verfahrrichtung nicht verfahren wird. Die entsprechenden Ausführungen sind jedoch in analoger Weise auch auf ein Verfahren des Krans 1 als Ganzes in seiner Verfahrrichtung übertragbar. - Zur näheren Erläuterung wird zunächst ein Koordinatensystem eingeführt, wobei die Richtung x mit der Verfahrrichtung der Laufkatze 3 übereinstimmt und die Richtung z die Vertikalrichtung ist.
- Wenn in diesem Fall die Verfahrbewegung der Laufkatze 3 - bzw. allgemein die Verfahrbewegung des Lastaufhängepunkts 2 - mit xK(t) gegeben ist und weiterhin die Seillänge L als Funktion der Zeit t durch die Beziehung L(t) gegeben ist und weiterhin mit m die Masse der Last 6 und mit g die Endbeschleunigung bezeichnet sind, so gelten im Falle einer Pendelbewegung der Last 6 um den Lastaufhängepunkt 2 für die Koordinaten x, z der Last 6 die Beziehungen




- ϕ bezeichnet den Auslenkwinkel der Last 6 aus einer vertikalen Ebene 11, die den Lastaufhängepunkt 2 enthält und innerhalb derer die Last 6 pendelt. Die vertikale Ebene 11 verläuft im skizzierten Fall, in dem die Laufkatze 3 verfahren wird, parallel zur Verfahrrichtung der Laufkatze 3. Diese Ebene ist in
FIG 2 gestrichelt eingezeichnet. Alternativ könnte die vertikale Ebene 11 orthogonal zu der Verfahrrichtung der Laufkatze 3 verlaufen. Diese Ebene ist inFIG 1 gestrichelt eingezeichnet. - Diese Gleichungen lassen sich unter Berücksichtigung des Lagrange-Funktionals F



- Für kleine Winkel ϕ kann diese Gleichung durch die Beziehung

- Anhand der Gleichungen 7 und 8 erkennt man zunächst den charakteristischen Eigenwert der Pendelschwingung, also die Pendelfrequenz f. Denn ohne äußere Anregung, d.h. bei unbeschleunigter Bewegung des Lastaufhängepunkts 2 und unveränderter Seillänge L, vereinfacht sich beispielsweise die Gleichung 7 zu

- Für die Pendelfrequenz f gilt daher die Beziehung

- Weiterhin erkennt man die prinzipiellen Möglichkeiten, die Pendelschwingung der Last 6 zu beeinflussen, nämlich durch eine Beschleunigung der Laufkatze 3 bzw. allgemein des Lastaufhängepunkts 2 und durch Einstellen der Seillänge L zu Zeiten, zu denen die Last 6 nicht ruht, die erste zeitliche Ableitung ϕ̇ des Pendelwinkels ϕ also einen von Null verschiedenen Wert aufweist.
- Unabhängig davon, welche Vorgehensweise zur Beeinflussung der Pendelbewegung im Stand der Technik ergriffen wird, besteht das Ziel der Vorgehensweisen des Standes der Technik stets darin, Pendelbewegungen zu unterdrücken bzw. zu dämpfen. Vorliegend wurde jedoch erkannt, dass es auf die Pendelbewegung während des Verfahrens des Lastaufhängepunkts 2 nicht ankommt. Die Last 6 kann also während des Verfahrens des Lastaufhängepunkts 2 durchaus pendeln. Entscheidend ist lediglich, dass an einem Zielort, zu dem die Steuereinrichtung 7 den Lastaufhängepunkt 2 und damit auch (soweit es die horizontale Lage betrifft) die Last 6 verfährt, die Pendelbewegung wieder zum Stillstand kommt.
- Im Rahmen der vorliegenden Erfindung verfährt also - wie im Stand der Technik auch - die Steuereinrichtung 7 durch Ansteuern des Katzantriebs 3' die Laufkatze 3 zu einem Zielort. Während des Verfahrens des Lastaufhängepunkts 2 stellt die Steuereinrichtung 7 - wie im Stand der Technik auch - durch Ansteuern des Hubwerks 5' die Seillänge L des Seilsystems 5 ein. Im Einzelfall kann dies bedeuten, dass die Steuereinrichtung 7 die einmal eingestellte Seillänge L beibehält. In der Regel wird die Seillänge L von der Steuereinrichtung 7 jedoch während des Verfahrens des Lastaufhängepunkts 2 variiert. Neuartig und Kern der Erfindung ist jedoch die Art und Weise, auf welche das Verfahren der Laufkatze 3 und das Einstellen der Seillänge L aufeinander abgestimmt werden.
- Im Rahmen des Verfahrens sind der Steuereinrichtung 7 gemäß den
FIG 4 und5 eine anfängliche Seillänge L0, eine am Zielort zu erreichende Ziel-Seillänge L1 sowie ein anfänglicher Auslenkwinkel ϕ0 der Pendelbewegung der Last 6 und/oder eine anfängliche Ableitung ϕ̇0 des Auslenkwinkels ϕ der Pendelbewegung gegeben. Die anfänglichen Werte ϕ0 und ϕ̇0 können als absolute Werte gegeben sein. In der Regel sind sie als relative Größen, also bezogen auf Amplituden, gegeben. - Weiterhin ist der Steuereinrichtung 7 gemäß den
FIG 4 und5 ein Endwert ϕ1 bekannt, welchen der Auslenkwinkel ϕ am Zielort annehmen soll. Alternativ oder zusätzlich - in der Regel zusätzlich - ist der Steuereinrichtung 7 ein Endwert ϕ̇1 bekannt, welchen die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ am Zielort annehmen soll. Die Endwerte ϕ1, ϕ̇1 können der Steuereinrichtung 7 beispielsweise aufgrund des Computerprogramms 8 als solche bekannt sein. Alternativ können die Endwerte ϕ1, ϕ̇1 der Steuereinrichtung 7 beispielsweise von einem Benutzer 12 des Krans 1 (sieheFIG 1 und 2 ) vorgegeben werden. Die Endwerte ϕ1 und ϕ̇1 können als absolute Werte gegeben sein. In der Regel sind sie analog zu den anfänglichen Werten ϕ0 und ϕ̇0 als relative Größen, also bezogen auf Amplituden, gegeben. - Bei der erfindungsgemäßen Ausgestaltung gemäß
FIG 4 ist der Steuereinrichtung 7 weiterhin der zeitliche Verlauf der Verfahrbewegung xK des Lastaufhängepunkts 2 vorgegeben. In diesem Fall ermittelt die Steuereinrichtung 7 den zeitlichen Verlauf der Seillänge L derart, dass am Zielort der Auslenkwinkel ϕ der Pendelbewegung den definierten Endwert ϕ1 annimmt und/oder die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ den definierten Endwert ϕ̇1 annimmt. Die Steuereinrichtung 7 stellt in diesem Fall während des Verfahrens des Lastaufhängepunkts 2 die Seillänge L entsprechend dem ermittelten zeitlichen Verlauf der Seillänge L ein. - Bei der Ausgestaltung gemäß
FIG 5 ist der Steuereinrichtung 7 der zeitliche Verlauf der Verfahrbewegung xK des Lastaufhängepunkts 2 nicht vorgegeben. Auch in diesem Fall ermittelt die Steuereinrichtung 7 den zeitlichen Verlauf der Seillänge L. Zusätzlich ermittelt die Steuereinrichtung 7 jedoch auch den zeitlichen Verlauf der Verfahrbewegung xK des Lastaufhängepunkts 2. Die Steuereinrichtung 7 stimmt die beiden zeitlichen Verläufe derart aufeinander ab, dass am Zielort der Auslenkwinkel ϕ der Pendelbewegung den definierten Endwert ϕ1 annimmt und/oder die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ den definierten Endwert ϕ̇1 annimmt. Die Steuereinrichtung 7 verfährt in diesem Fall den Lastaufhängepunkt 2 entsprechend dem für den Lastaufhängepunkt 2 ermittelten zeitlichen Verlauf und stellt weiterhin während des Verfahrens des Lastaufhängepunkts 2 die Seillänge L entsprechend dem ermittelten für die Seillänge L zeitlichen Verlauf ein. - Konkrete Vorgehensweisen werden nachfolgend anhand mehrerer Beispiele erläutert. Die Beispiele werden in Verbindung damit erläutert, dass die Laufkatze 3 in ihrer Verfahrrichtung verfahren wird. In diesem Fall verläuft die vertikale Ebene 11, auf welche die Pendelbewegung der Last 6 bezogen ist, parallel zur Verfahrrichtung der Laufkatze 3. Es wäre jedoch ebenso möglich, den Kran 1 als Ganzes zu verfahren. In diesem Fall verläuft die vertikale Ebene 11, auf welche die Pendelbewegung der Last 6 bezogen ist, orthogonal zur Verfahrrichtung der Laufkatze 3.
- Weiterhin wird die vorliegende Erfindung unter der Annahme erläutert, dass der definierte Endwert ϕ1 des Auslenkwinkels ϕ der Pendelbewegung Null ist und auch der definierte Endwert ϕ̇1 der zeitlichen Ableitung ϕ̇ des Auslenkwinkels ϕ der Pendelbewegung Null ist. Die definierten Endwerte ϕ1, ϕ̇1 könnten jedoch ebenso andere Größen aufweisen. Beispielsweise könnte der definierte Endwert ϕ1 des Auslenkwinkels ϕ der Pendelbewegung Null sein und der definierte Endwert ϕ̇1 der zeitlichen Ableitung ϕ̇ des Auslenkwinkels ϕ der Pendelbewegung maximal sein, d.h. ihren maximalen Wert aufweisen und in die gleiche Richtung zeigen, in welche die Verfahrbewegung des Lastaufhängepunkts 2 gerichtet ist. Auch andere Werte sind möglich.
- Die Last 6 kann nach Bedarf ausgebildet sein. Beispielsweise kann es sich bei der Last 6 um einen Spreader mit oder ohne vom Spreader aufgenommenen Container handeln. Alternativ kann es sich beispielsweise um einen vollen oder leeren Greifer zum Umschlagen von Schüttgut handeln. Auch andere Ausgestaltungen der Last 6 sind möglich.
- Gemäß Beispiel 1 befindet sich der Lastaufhängepunkt 2 zu dem Zeitpunkt, zu dem das erfindungsgemäße Verfahren ausgeführt wird, an einem Anfangsort x0. Der Lastaufhängepunkt 2 wird bereits mit einer konstanten Geschwindigkeit v verfahren. Die Geschwindigkeit v soll beibehalten werden, bis der Lastaufhängepunkt 2 einen Ort x1 (nachfolgend als Grenzort bezeichnet) erreicht. Danach soll der Lastaufhängepunkt 2 mit konstanter Verzögerung in den Stillstand abgebremst werden. Bis der Lastaufhängepunkt 2 zum Stillstand gekommen ist, wird er weiter bis zum Zielort x2 verfahren. Als gewünschte Endwerte ϕ1, ϕ̇1 für den Auslenkwinkel ϕ und die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ sei jeweils Null vorgegeben. Am Anfangsort x0 weist die Pendelbewegung der Last 6 einen anfänglichen Auslenkwinkel ϕ0 und eine anfängliche zeitliche Ableitung ϕ̇0 des Auslenkwinkels ϕ auf. Die anfängliche Seillänge L0 am Anfangsort x0 soll auch am Grenzort x1 und am Zielort x2 gegeben sein.
- Aufgrund der Bewegungsgleichung kann zurückgerechnet werden, welche Zwischenwerte der Phasenwinkel ϕ und die zeitliche Ableitung ϕ̇ des Phasenwinkels ϕ am Grenzort x1 aufweisen müssen. Aufgrund des Abstands zwischen dem Anfangsort x0 und dem Grenzort x1 sowie der konstanten Geschwindigkeit v ist weiterhin bekannt, in welcher Zeit der Lastaufhängepunkt 2 vom Anfangsort x0 zum Grenzort x1 verfahren wird. Durch zeitliche Fortschreibung der Pendelbewegung gemäß der Bewegungsgleichung ab dem Anfangsort x0 kann somit weiterhin ohne weiteres ermittelt werden, welche Werte der Auslenkwinkel ϕ und die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ aufweisen, wenn zwischen dem Anfangsort x0 und dem Grenzort x1 die Seillänge L nicht geändert wird.
- Im Einzelfall kann es geschehen, dass die sich ergebenden Werte des Auslenkwinkels ϕ und der zeitlichen Ableitung ϕ̇ des Auslenkwinkels ϕ mit den zurückgerechneten Zwischenwerten übereinstimmen. In diesem Fall kann die Seillänge L unverändert beibehalten werden. In der Regel wird sich jedoch eine Abweichung ergeben. Je nach Betrag und Vorzeichen der Abweichung kann daher beispielsweise an einem Änderungsort x3 die Seillänge L von der anfänglichen Seillänge L0 auf einen Zwischenwert verkürzt werden oder auf einen anderen Zwischenwert verlängert werden, so dass die Last 6 mit größerer oder kleinerer Frequenz als zuvor pendelt. An einem weiteren Änderungsort x4 wird dann die Seillänge L wieder auf die anfängliche Seillänge L0 eingestellt. Die Last 6 pendelt ab dem weiteren Änderungsort x4 wieder mit der gleichen Frequenz wie vor dem Änderungsort x3. Aufgrund der geänderten Seillänge L zwischen den Änderungsorten x3 und x4 hat sich jedoch die Phasenlage der Pendelbewegung geändert. Durch die Änderung der Seillänge L zwischen den Änderungsorten x3 und x4 kann somit erreicht werden, dass am Grenzort x1 die zurückgerechneten Zwischenwerte und somit am Zielort x2 die definierten Endwerte ϕ1, ϕ̇1 erreicht werden.
- Die Änderungsorte x3 und x4 und die Änderung der Seillänge L können nach Bedarf gewählt werden. In der Regel kommt es nur darauf an, die Phasenlage der Pendelbewegung entsprechend einzustellen. Vorzugsweise werden, soweit möglich, die Änderungsorte x3 und x4 so gelegt, dass ein Verringern der Seillänge L erfolgt, während die Last 6 sich in einem Extremum ihrer Pendelbewegung befindet, und dass ein Vergrößern der Seillänge L erfolgt, während die Last 6 sich in einem Nulldurchgang ihrer Pendelbewegung befindet.
- Beispiel 2 baut auf Beispiel 1 auf. Der Unterschied besteht darin, dass gemäß Beispiel 2 die Last 6 zunächst ohne Pendeln unter dem stillstehenden Lastaufhängepunkt 2 hängt. Sodann soll die Last 6 von der Steuereinrichtung 7 durch Ansteuern des Katzantriebs 3' mit einer vorbestimmten Beschleunigung auf den Zielort x2 zu beschleunigt werden, bis er die konstante Geschwindigkeit v erreicht. Sodann reduziert die Steuereinrichtung 7 die Beschleunigung des Lastaufhängepunkts 2 auf Null.
- Die Lösung ist völlig analog Beispiel 1. Es müssen lediglich anhand der Bewegungsgleichung der anfängliche Auslenkwinkel ϕ0 der Pendelbewegung und die anfängliche zeitliche Ableitung ϕ̇0 des Auslenkwinkels ϕ der Pendelbewegung ermittelt werden, welche die Last 6 aufweist, wenn die Beschleunigung des Lastaufhängepunkts 2 auf Null reduziert wird. Ferner muss der zugehörige Anfangsort x0 ermittelt werden.
- Auch Beispiel 3 baut auf Beispiel 1 auf. Der Unterschied besteht darin, dass gemäß Beispiel 3 der Steuereinrichtung 7 zusätzlich eine Seilgeschwindigkeit gegeben ist, mit der die Seillänge L vor dem Zielort x2 - beispielsweise ab dem Grenzort x1 - auf eine Ziel-Seillänge L1 erhöht werden soll (die Last 6 also abgesenkt werden soll).
- Auch hier ist die Lösung völlig analog Beispiel 1. Denn die Bewegungsgleichung ist universell und deckt auch den Fall mit ab, dass die Seillänge L sich ändert. Insbesondere bestimmt die Steuereinrichtung 7 anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts 2, der anfänglichen Seillänge L0 und der Ziel-Seillänge L1 einen weiteren Grenzort x1'. Ab dem Erreichen des weiteren Grenzorts x1' erhöht die Steuereinrichtung 7 die Seillänge L mit der Seilgeschwindigkeit auf die Ziel-Seillänge L1.
- Aufgrund der Bewegungsgleichung kann zurückgerechnet werden, welche Zwischenwerte der Phasenwinkel ϕ und die zeitliche Ableitung ϕ̇ des Phasenwinkels ϕ am Grenzort x1 und am weiteren Grenzort x1' aufweisen müssen. Vor dem zuerst erreichten der beiden Grenzorte x1, x1' erfolgt eine gleichförmige Bewegung des Lastaufhängepunkts 2 mit der Geschwindigkeit v und freier Pendelung der Last 6. Ab dem zuerst erreichten der beiden Grenzorte x1, x1' werden der Lastaufhängepunkt 2 beschleunigt und/oder die Seillänge L geändert, so dass auf die Pendelbewegung Einfluss genommen wird.
- Analog zu Beispiel 1 kann daher aufgrund des Abstands zwischen dem Anfangsort x0, dem zuerst erreichten der beiden Grenzorte x1, x1' und der konstanten Geschwindigkeit v ermittelt werden, in welcher Zeit der Lastaufhängepunkt 2 vom Anfangsort x0 zum zuerst erreichten Grenzort x1, x1' verfahren wird. Durch zeitliche Fortschreibung der Pendelbewegung gemäß der Bewegungsgleichung ab dem Anfangsort x0 kann somit weiterhin ohne weiteres ermittelt werden, welche Werte der Auslenkwinkel ϕ und die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ aufweisen, wenn zwischen dem Anfangsort x0 und dem zuerst erreichten der beiden Grenzorte x1, x1' die Seillänge L nicht geändert wird. Die Kompensation der Phasenlage der Pendelbewegung kann wie zuvor in Beispiel 1 erfolgen.
- Beispiel 4 baut auf Beispiel 2 auf. Der Unterschied besteht darin, dass gemäß Beispiel 4 die Steuereinrichtung 7 während des Beschleunigens des Lastaufhängepunkts 2 durch Ansteuern des Hubwerks 5' die Seillänge L auf die anfängliche Seillänge L0 reduziert. In diesem Fall berücksichtigt die Steuereinrichtung 7 die Reduzierung der Seillänge L bei der Ermittlung des anfänglichen Auslenkwinkels ϕ0 der Pendelbewegung und/ oder der anfänglichen Ableitung ϕ̇0 des Auslenkwinkels ϕ der Pendelbewegung. Auch hier ist die Berücksichtigung ohne weiteres möglich, weil die Bewegungsgleichung universell ist.
- Selbstverständlich sind auch Kombinationen der Beispiele 1 bis 4 möglich.
- Gemäß Beispiel 5 befindet sich der Lastaufhängepunkt 2 zu dem Zeitpunkt, zu dem das erfindungsgemäße Verfahren ausgeführt wird, am Anfangsort x0. Der Lastaufhängepunkt 2 wird bereits mit der konstanten Geschwindigkeit v verfahren. Die Geschwindigkeit v soll beibehalten werden, bis der Lastaufhängepunkt 2 einen noch zu bestimmenden Ort x1 (nachfolgend wieder als Grenzort bezeichnet) erreicht. Danach soll der Lastaufhängepunkt 2 mit konstanter Verzögerung in den Stillstand abgebremst werden. Bis der Lastaufhängepunkt 2 zum Stillstand gekommen ist, wird er weiter bis zum Zielort x2 verfahren. Solange der Lastaufhängepunkt 2 mit konstanter Geschwindigkeit v verfahren wird, soll die Seillänge L auf ihrem ursprünglichen Wert L0 beibehalten werden. Ab dem Grenzort x1 soll die Seillänge L von ihrem ursprünglichen Wert L0 auf eine Ziel-Seillänge L1 vergrößert werden. Das Verlängern der Seillänge L soll zwischen dem Grenzort x1 und dem Zielort x2 mit einer konstanten Seilgeschwindigkeit erfolgen.
- Die Steuereinrichtung 7 ist daher in der Lage, vorläufig den Grenzort x1 festzulegen und ausgehend von dem Anfangsort x0 und dem dort gegebenen Pendelzustand den Pendelzustand am Grenzort x1 zu ermitteln. Die vorläufige Festlegung des Grenzorts x1 kann mehr oder minder willkürlich sein. Beispielsweise kann beim Ansetzen des Grenzorts x1 davon ausgegangen werden, dass die Verzögerung des Lastaufhängepunkts 2 und/oder die Seilgeschwindigkeit vL ihre Maximalwerte annehmen.
- Sodann kann die Steuereinrichtung 7, ausgehend vom Grenzort x1 unter Berücksichtigung der (negativen) Beschleunigung des Lastaufhängepunkts 2 und der (positiven) Änderung der Seillänge L den Pendelzustand am Zielort x2 zu ermitteln.
- In der Regel wird der sich ergebende Pendelzustand der Last 6 - also dessen Auslenkwinkel ϕ und dessen zeitliche Änderung ϕ̇ - am Zielort x2 von den vorgegebenen, definierten Endwerten ϕ1, ϕ̇1 verschieden sein. Die Steuereinrichtung 7 kann daher aufgrund der sich ergebenden Abweichungen den Grenzort x1 neu bestimmen und für den neu bestimmten Grenzort x1 erneut ermitteln, welcher Pendelzustand der Last 6 sich am Zielort x2 ergibt. Dadurch kann durch einige wenige Iterationen schnell der korrekte Grenzort x1 ermittelt werden.
- Beispiel 6 baut auf Beispiel 5 auf. Der Unterschied besteht darin, dass gemäß Beispiel 6 die Last 6 zunächst ohne Pendeln unter dem stillstehenden Lastaufhängepunkt 2 hängt. Sodann soll die Last 6 von der Steuereinrichtung 7 durch Ansteuern des Katzantriebs 3' mit einer vorbestimmten Beschleunigung auf den Zielort x2 zu beschleunigt werden, bis er die konstante Geschwindigkeit v erreicht. Sodann reduziert die Steuereinrichtung 7 die Beschleunigung des Lastaufhängepunkts 2 auf Null.
- Die Lösung ist völlig analog Beispiel 5. Es müssen lediglich anhand der Bewegungsgleichung der anfängliche Auslenkwinkel ϕ der Pendelbewegung und die anfängliche zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ der Pendelbewegung ermittelt werden, welche die Last 6 aufweist, wenn die Beschleunigung des Lastaufhängepunkts 2 auf Null reduziert wird. Ferner muss der zugehörige Anfangsort x0 ermittelt werden.
- Beispiel 7 baut auf Beispiel 6 auf. Der Unterschied zu Beispiel 6 besteht darin, dass gemäß Beispiel 7 die Steuereinrichtung 7 während des Beschleunigens des Lastaufhängepunkts 2 durch Ansteuern des Hubwerks 5' die Seillänge L auf die anfängliche Seillänge L0 reduziert. In diesem Fall berücksichtigt die Steuereinrichtung 7 die Reduzierung der Seillänge L bei der Ermittlung des anfänglichen Auslenkwinkels ϕ0 der Pendelbewegung und/oder der anfänglichen Ableitung ϕ̇0 des Auslenkwinkels ϕ der Pendelbewegung. Auch hier ist die Berücksichtigung ohne weiteres möglich, weil die Bewegungsgleichung universell ist.
- Selbstverständlich sind auch Variationen der Beispiele 5 bis 7 möglich. Insbesondere (Beispiele 8 bis 10 -
FIG 10 ) ist es möglich, dass die Seilgeschwindigkeit zwischen dem Grenzort x1 und dem Zielort x2 nicht konstant gehalten wird, sondern um eine mittlere Seilgeschwindigkeit oszilliert. Die zugehörige Oszillationsfrequenz sollte jedoch derart bestimmt sein, dass in dem Zeitraum, welchen der Lastaufhängepunkt 2 zum Verfahren vom Grenzort x1 zum Zielort x2 benötigt, mindestens drei vollständige Oszillationen der Seilgeschwindigkeit ausgeführt werden. - Es ist möglich, die erfindungsgemäße Vorgehensweise rein gesteuert auszuführen. Beispielsweise kann in manchen Fällen (beispielsweise beim Umschlagen von Containern) ohne weiteres davon ausgegangen werden, dass beim Aufnehmen eines Containers mittels eines Spreaders (in diesem Fall ist die Last 6 der Spreader mit dem Container) und beim Abheben des Spreaders von einem abgesetzten Container (in diesem Fall ist die Last 6 der Spreader allein) der Pendelzustand zunächst ruhend ist. Alternativ zu einer Steuerung ist es möglich, dass die Steuereinrichtung 7 eine Regelung realisiert. In diesem Fall erfasst die Steuereinrichtung 7 während des Verfahrens des Lastaufhängepunkts 2 kontinuierlich den Auslenkwinkel ϕ der Pendelbewegung und/oder die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ der Pendelbewegung. Dadurch ist die Steuereinrichtung 7 in der Lage, in dem Fall, dass der zeitliche Verlauf der Verfahrbewegung des Lastaufhängepunkts 2 gegeben ist, den zeitlichen Verlauf der Seillänge L kontinuierlich - also in Echtzeit - zu bestimmen. Ebenso ist die Steuereinrichtung 7 in dem Fall, dass der zeitliche Verlauf der Verfahrbewegung des Lastaufhängepunkts 2 nicht gegeben ist, in der Lage den zeitlichen Verlauf der Verfahrbewegung des Lastaufhängepunkts 2 und den zeitlichen Verlauf der Seillänge L kontinuierlich - also in Echtzeit - zu bestimmen. Eine Regelung ist insbesondere dann sinnvoll, wenn das Anfahren des Lastaufhängepunkts 2 aus dem Stillstand manuell erfolgt und sodann in ein automatisiertes Verfahren zum Zielort x2 übergegangen wird.
- Die Verfahrbewegungen des Lastaufhängepunkts 2 und die Bestimmung der Seillänge L können unter Verwendung der Bewegungsgleichung ebenso mittels Verfahren der mathematischen Optimierung berechnet werden. In diesem Fall sucht ein numerischer Algorithmus nach einem vorgegebenen Optimierungskriterium (beispielsweise zeitoptimal oder energieoptimal) und unter Berücksichtigung von Randbedingungen wie beispielsweise maximal möglichen Geschwindigkeiten und Beschleunigungen, zu umfahrenden Hindernissen und dergleichen mehr die beste Lösung.
- Die entsprechende Erfassungseinrichtung 13 zur Erfassung des Pendelzustands der Last 6, also von Daten, die für den Auslenkwinkel ϕ des Seilsystems 5 und/oder mindestens eine zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ - beispielsweise die Winkelgeschwindigkeit oder die Winkelbeschleunigung - charakteristisch sind, kann nach Bedarf ausgebildet sein. Beispielsweise können gemäß der Darstellung in den
FIG 1 und 2 mittels ortsfester Kameras Bilder erfasst werden, durch deren Auswertung der Auslenkwinkel ϕ und/oder dessen zeitliche Ableitung ϕ̇ ermittelt werden können. Alternativ ist es möglich, mittels einer auf der Laufkatze 3 angeordneten Kamera ein nach unten gerichtetes Bild zu erfassen und durch dessen Auswertung den Auslenkwinkel ϕ und/oder dessen zeitliche Ableitung ϕ̇ zu ermitteln. Weiterhin ist es möglich, eine Kraft zu erfassen, die auf die Laufkatze 3 wirkt, und diese Kraft im Sinne einer entsprechenden Auswertung zu verarbeiten. Die letztgenannte Vorgehensweise ist insbesondere dann möglich, wenn die vertikale Ebene 11 parallel zur Verfahrrichtung der Laufkatze 3 verläuft. Welche Vorgehensweise konkret ergriffen wird, ist im Rahmen der vorliegenden Erfindung von untergeordneter Bedeutung. Entscheidend ist lediglich, dass anhand der erfassten Daten der Auslenkwinkel ϕ und/oder dessen zeitliche Ableitung ϕ̇ ermittelt werden können. - In dem Fall, dass der Steuereinrichtung 7 der zeitliche Verlauf der Verfahrbewegung des Lastaufhängepunkts 2 vorgegeben ist, ist es möglich, dass ein einmal vorgegebener zeitlicher Verlauf nicht mehr geändert werden kann. Alternativ ist es möglich, dass der zeitliche Verlauf - beispielsweise aufgrund einer entsprechenden Eingabe durch den Benutzer 12 (siehe ebenfalls
FIG 1 und 2 ) - während des Verfahrens des Lastaufhängepunkts 2 geändert wird. In diesem Fall bestimmt die Steuereinrichtung 7 den zeitlichen Verlauf der Seillänge L unter Berücksichtigung der geänderten Verfahrbewegung des Lastaufhängepunkts 2 neu. - Je nach Zeitpunkt und Ausmaß einer Änderung der Verfahrbewegung des Lastaufhängepunkts 2 kann es im Einzelfall geschehen, dass im Rahmen der Möglichkeiten (beispielsweise der maximal möglichen Seilgeschwindigkeit und der verbleibenden Zeit) das erfindungsgemäße Verfahren nicht mehr ausgeführt werden kann. In diesem Fall bestimmt die Steuereinrichtung 7 den zeitlichen Verlauf der Seillänge L derart, dass der definierte Endwert ϕ1, ϕ̇1 des Auslenkwinkel ϕ und der zeitlichen Ableitung ϕ̇ des Auslenkwinkels ϕ so weit wie möglich angenähert werden. Insbesondere für den Fall, dass sowohl der definierte Endwert ϕ1 des Auslenkwinkels ϕ als auch der definierte Endwert ϕ̇1 der zeitlichen Ableitung ϕ̇ des Auslenkwinkels ϕ Null sind, bestimmt die Steuereinrichtung 7 in einem derartigen Fall den zeitlichen Verlauf der Seillänge L derart, dass die Energie der nicht mehr zu vermeidenden Restpendelbewegung möglichst gering ist.
- Zusammengefasst betrifft die vorliegende Erfindung somit folgenden Sachverhalt:
- Eine Last 6 ist über ein Seilsystem 5 eines Krans 1 an einem Lastaufhängepunkt 2 aufgehängt. Eine Steuereinrichtung 7 verfährt durch Ansteuern eines Antriebs 3', 5' den Lastaufhängepunkt 2 zu einem Zielort x2. Die Steuereinrichtung 7 stellt während des Verfahrens des Lastaufhängepunkts 2 durch Ansteuern eines Hubwerks 5' eine Seillänge L des Seilsystems 5 ein.
- Der Steuereinrichtung 7 sind eine anfängliche Seillänge L0, eine am Zielort x2 zu erreichende Ziel-Seillänge L1 sowie ein anfänglicher Auslenkwinkel ϕ0 einer Pendelbewegung, welche die Last 6 während des Verfahrens des Lastaufhängepunkts 2 zum Zielort x2 in einer den Lastaufhängepunkt 2 enthaltenden vertikalen Ebene 11 um den Lastaufhängepunkt 2 ausführt, und/oder eine anfängliche Ableitung ϕ̇ des Auslenkwinkels ϕ der Pendelbewegung gegeben. Die Steuereinrichtung 7 ermittelt bei gegebenem zeitlichem Verlauf der Verfahrbewegung des Lastaufhängepunkts 2 einen zeitlichen Verlauf der Seillänge L und stellt die Seillänge L entsprechend dem ermittelten zeitlichen Verlauf ein. Die Ermittlung erfolgt derart, dass am Zielort x2 der Auslenkwinkel ϕ der Pendelbewegung und/oder die zeitliche Ableitung ϕ̇ des Auslenkwinkels ϕ der Pendelbewegung einen definierten Endwert ϕ1, ϕ̇1 annehmen.
- Die vorliegende Erfindung weist viele Vorteile auf. Insbesondere kann das erfindungsgemäße Verfahren direkt in die Kransteuerung integriert werden. In der Kransteuerung sind alle erforderlichen Anlagenparameter und Sensorinformationen bekannt. Vor allem aber kann die Verfahrbewegung des Lastaufhängepunkts 2 in erheblichem Umfang unabhängig von einer dadurch bewirkten Pendelbewegung der Last 6 bestimmt werden. Ein Pendeln der Last 6 während des Verfahrens des Lastaufhängepunkts 2 kann hingenommen werden. Es muss lediglich dafür gesorgt werden, dass am Endpunkt der Verfahrbewegung des Lastaufhängepunkts 2, also am Zielort x2, der gewünschte Pendelzustand erreicht wird. Dies kann durch Einstellen der Seillänge L während des Verfahrens des Lastaufhängepunkts 2 erreicht werden.
- Obwohl die Erfindung im Detail durch das bevorzugte Ausführungsbeispiel näher illustriert und beschrieben wurde, so ist die Erfindung nicht durch die offenbarten Beispiele eingeschränkt und andere Variationen können vom Fachmann hieraus abgeleitet werden, ohne den Schutzumfang der Erfindung, gemäß den Ansprüchen, zu verlassen.
Claims (13)
- Verfahren zum Verfahren einer Last (6) mittels eines Krans (1), wobei die Last (6) über ein Seilsystem (5) des Krans (1) an einem Lastaufhängepunkt (2) des Krans (1) aufgehängt ist,- wobei eine Steuereinrichtung (7) des Krans (1) durch Ansteuern eines Antriebs (3', 1') den Lastaufhängepunkt (2) zu einem Zielort (x2) verfährt,- wobei die Steuereinrichtung (7) während des Verfahrens des Lastaufhängepunkts (2) durch Ansteuern eines Hubwerks (5') eine Seillänge (L) des Seilsystems (5) einstellt,- wobei der Steuereinrichtung (7) eine anfängliche Seillänge (L0), eine am Zielort (x2) zu erreichende Ziel-Seillänge (L1) sowie ein anfänglicher Auslenkwinkel (ϕ0) einer Pendelbewegung, welche die Last (6) während des Verfahrens des Lastaufhängepunkts (2) zum Zielort (x2) in einer den Lastaufhängepunkt (2) enthaltenden vertikalen Ebene (11) um den Lastaufhängepunkt (2) ausführt, und/oder eine anfängliche Ableitung (ϕ̇0) des Auslenkwinkels (ϕ) der Pendelbewegung gegeben sind und- wobei die Steuereinrichtung (7) bei gegebenem zeitlichem Verlauf der Verfahrbewegung des Lastaufhängepunkts (2) einen zeitlichen Verlauf der Seillänge (L) derart ermittelt und einstellt, dass am Zielort (x2) der Auslenkwinkel (ϕ) der Pendelbewegung und/oder eine zeitliche Ableitung (ϕ̇) des Auslenkwinkels (ϕ) der Pendelbewegung einen definierten Endwert (ϕ1, ϕ̇1) annehmen.
- Verfahren nach Anspruch 1,
dadurch gekennzeichnet,
dass der definierte Endwert (ϕ1) des Auslenkwinkels (ϕ) der Pendelbewegung Null ist und/oder dass der definierte Endwert (ϕ̇1) der zeitlichen Ableitung (ϕ̇) des Auslenkwinkels (ϕ) der Pendelbewegung Null oder maximal ist. - Verfahren nach Anspruch 1 oder 2,
dadurch gekennzeichnet,- dass der Steuereinrichtung (7) zusätzlich eine Seilgeschwindigkeit, mit der die Seillänge (L) vor dem Zielort (x2) erhöht werden soll, gegeben ist,- dass die Steuereinrichtung (7) anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts (2), der anfänglichen Seillänge (L0), der Ziel-Seillänge (L1) und der Seilgeschwindigkeit einen Grenzort (x1) bestimmt,- dass die Steuereinrichtung (7) ab dem Erreichen des Grenzorts (x1) die Seillänge (L) mit der Seilgeschwindigkeit auf die Ziel-Seillänge (L1) erhöht,- dass die Steuereinrichtung (7) anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts (2) vom Grenzort (x1) zum Zielpunkt (x2), der Seilgeschwindigkeit, der Ziel-Seillänge (L1) und des definierten Endwerts (ϕ1) des Auslenkwinkels (ϕ) und/oder des definierten Endwerts ( ϕ̇1) der zeitlichen Ableitung (ϕ̇) des Auslenkwinkels (ϕ) für den Grenzort (x1) einen Zwischenwert des Auslenkwinkels (ϕ) und/oder der zeitlichen Ableitung (ϕ̇) des Auslenkwinkels (ϕ) ermittelt und- dass die Steuereinrichtung (7) anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts (2) bis zum Grenzort (x1), der anfänglichen Seillänge (L0), des anfänglichen Auslenkwinkels (ϕ0) der Pendelbewegung und/oder der anfänglichen Ableitung (ϕ̇0) des Auslenkwinkels (ϕ) der Pendelbewegung den zeitlichen Verlauf der Seillänge (L) bis zum Erreichen des Grenzorts (x1) derart bestimmt, dass am Grenzort (x1) der Auslenkwinkel (ϕ) der Pendelbewegung und/oder die zeitliche Ableitung (ϕ̇) des Auslenkwinkels (ϕ) der Pendelbewegung den ermittelten Zwischenwert annehmen. - Verfahren nach Anspruch 1 oder 2,
dadurch gekennzeichnet,- dass die Steuereinrichtung (7) anhand des zeitlichen Verlaufs der Verfahrbewegung des Lastaufhängepunkts (2), der anfänglichen Seillänge (L0), der Ziel-Seillänge (L1), des anfänglichen Auslenkwinkels (ϕ0) der Pendelbewegung und/ oder der anfänglichen zeitlichen Ableitung (ϕ̇0) des Auslenkwinkels (ϕ) der Pendelbewegung einen Grenzort (x1) ermittelt,- dass die Steuereinrichtung (7) ab dem Grenzort (x1) die Seillänge (L) entweder mit einer mittleren Seilgeschwindigkeit oder mit einer um die mittlere Seilgeschwindigkeit oszillierenden Seilgeschwindigkeit erhöht,- dass die mittlere Seilgeschwindigkeit durch die Differenz der Ziel-Seillänge (L1) und der anfänglichen Seillänge (L0), dividiert durch die zum Verfahren des Lastaufhängepunkts (2) vom Grenzort (x1) zum Zielort (x2) benötigte Zeit gegeben ist und- dass die Steuereinrichtung (7) den Grenzort (x1) derart ermittelt, dass am Zielort (x2) der Auslenkwinkel (ϕ) der Pendelbewegung und/oder die zeitliche Ableitung (ϕ̇) des Auslenkwinkels (ϕ) der Pendelbewegung den definierten Endwert (ϕ1, ϕ̇1) annehmen. - Verfahren nach einem der obigen Ansprüche,
dadurch gekennzeichnet,
dass die Last (6) zunächst an einem Anfangsort (x0) der Verfahrbewegung des Lastaufhängepunkts (2) ohne Pendeln unter dem Lastaufhängepunkt (2) hängt, dass die Steuereinrichtung (7) den Lastaufhängepunkt (2) durch Ansteuern des Antriebs (3', 1') ausgehend vom Anfangsort (x0) mit einer vorbestimmten Beschleunigung auf den Zielort (x2) zu beschleunigt, bis der Lastaufhängepunkt (2) mit einer vorbestimmten Geschwindigkeit (v) verfahren wird, dass die Steuereinrichtung (7) sodann die Beschleunigung auf Null reduziert und dass die Steuereinrichtung (7) den anfänglichen Auslenkwinkel (ϕ0) der Pendelbewegung und/oder die anfängliche Ableitung (ϕ̇0) des Auslenkwinkels (ϕ) der Pendelbewegung anhand der vorbestimmten Beschleunigung und der vorbestimmten Geschwindigkeit sowie der Seillänge (L) während der Beschleunigung ermittelt. - Verfahren nach Anspruch 5,
dadurch gekennzeichnet,
dass die Steuereinrichtung (7) während des Beschleunigens des Lastaufhängepunkts (2) durch Ansteuern des Hubwerks (5') die Seillänge (L) auf die anfängliche Seillänge (L0) reduziert und dass die Steuereinrichtung (7) die Reduzierung der Seillänge (L) bei der Ermittlung des anfänglichen Auslenkwinkels (ϕ0) der Pendelbewegung und/oder der anfänglichen Ableitung ( ϕ̇0) des Auslenkwinkels (ϕ) der Pendelbewegung berücksichtigt. - Verfahren nach einem der obigen Ansprüche,
dadurch gekennzeichnet,
dass die Steuereinrichtung (7) während des Verfahrens des Lastaufhängepunkts (2) kontinuierlich den Auslenkwinkel (ϕ) der Pendelbewegung und/oder die zeitliche Ableitung (ϕ̇) des Auslenkwinkels (ϕ) der Pendelbewegung erfasst und dass die Steuereinrichtung (7) den zeitlichen Verlauf der Seillänge (L) kontinuierlich bestimmt. - Verfahren nach einem der Ansprüche 1 bis 7,
dadurch gekennzeichnet,
dass der Lastaufhängepunkt (2) auf einem Ausleger (4) des Krans (1) mittels einer Laufkatze (3) in einer Verfahrrichtung verfahrbar ist und dass die vertikale Ebene (11), auf welche die Pendelbewegung der Last (6) bezogen ist, parallel zur Verfahrrichtung verläuft. - Verfahren nach einem der Ansprüche 1 bis 7,
dadurch gekennzeichnet,
dass der Lastaufhängepunkt (2) auf einem Ausleger (4) des Krans (1) mittels einer Laufkatze (3) in einer Verfahrrichtung verfahrbar, dass zusätzlich der Kran (1) als Ganzes orthogonal zur Verfahrrichtung der Laufkatze (3) verfahrbar ist und dass die vertikale Ebene (11), auf welche die Pendelbewegung der Last (6) bezogen ist, orthogonal zur Verfahrrichtung verläuft. - Verfahren nach einem der obigen Ansprüche,
dadurch gekennzeichnet,
dass der zeitliche Verlauf der Verfahrbewegung des Lastaufhängepunkts (2) während des Verfahrens des Lastaufhängepunkts (2) geändert wird und dass die Steuereinrichtung (7) den zeitlichen Verlauf der Seillänge (L) unter Berücksichtigung der geänderten Verfahrbewegung des Lastaufhängepunkts (2) neu bestimmt. - Computerprogramm, wobei das Computerprogramm Maschinencode (9) umfasst, der von einer Steuereinrichtung (7) für einen Kran (1) abarbeitbar ist, wobei die Abarbeitung des Maschinencodes (9) durch die Steuereinrichtung (7) bewirkt, dass die Steuereinrichtung (7) den Kran (1) gemäß einem Verfahren nach einem der obigen Ansprüche betreibt.
- Steuereinrichtung für einen Kran (1), wobei die Steuereinrichtung mit einem Computerprogramm (8) nach Anspruch 11 programmiert ist.
- Kran,- wobei der Kran einen Lastaufhängepunkt (2) aufweist, an dem über ein Seilsystem (5) des Krans eine Last (6) aufgehängt ist,- wobei der Kran mindestens einen Antrieb (3', 1') aufweist, mittels dessen der Lastaufhängepunkt (2) in einer Verfahrrichtung verfahrbar ist,- wobei der Kran ein Hubwerk (5') aufweist, mittels dessen eine Seillänge (L) des Seilsystems (5) einstellbar ist,- wobei der Kran eine Steuereinrichtung (7) aufweist, die gemäß Anspruch 12 ausgebildet ist.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14181264.4A EP2987759B1 (de) | 2014-08-18 | 2014-08-18 | Kran mit definierter Pendelbewegung bei Erreichen eines Zielorts |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14181264.4A EP2987759B1 (de) | 2014-08-18 | 2014-08-18 | Kran mit definierter Pendelbewegung bei Erreichen eines Zielorts |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2987759A1 EP2987759A1 (de) | 2016-02-24 |
| EP2987759B1 true EP2987759B1 (de) | 2016-11-16 |
Family
ID=51383569
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14181264.4A Active EP2987759B1 (de) | 2014-08-18 | 2014-08-18 | Kran mit definierter Pendelbewegung bei Erreichen eines Zielorts |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2987759B1 (de) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9969494B1 (en) * | 2015-09-28 | 2018-05-15 | Amazon Technologies, Inc. | Delivery drop platforms, tethers, and stabilization |
| US10071804B1 (en) | 2015-09-28 | 2018-09-11 | Amazon Technologies, Inc. | Delivery drop rate modulation |
| CN107902555B (zh) * | 2017-11-13 | 2019-03-01 | 浙江大学 | 一种网格精细化的岸边集装箱起重机最优控制系统 |
| CN112320593B (zh) * | 2020-11-17 | 2023-10-27 | 四川宏升重工机械有限公司 | 一种塔吊用滑动防抖机构 |
| CN120463098B (zh) * | 2025-05-27 | 2026-01-20 | 常州奥比利智能科技有限公司 | 一种用于无人天车的防摆动控制方法及系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5414389B2 (de) * | 1973-04-02 | 1979-06-06 | ||
| FR2698344B1 (fr) * | 1992-11-23 | 1994-12-30 | Telemecanique | Dispositif de régulation du transfert d'une charge suspendue. |
| DE102007041692A1 (de) * | 2007-09-03 | 2009-03-05 | Siemens Ag | Regelungseinrichtung zur Dämpfung von Pendelbewegungen einer seilgeführten Last |
| JP5293977B2 (ja) * | 2011-03-17 | 2013-09-18 | 富士電機株式会社 | クレーンの振れ止め制御方法及び振れ止め制御装置 |
-
2014
- 2014-08-18 EP EP14181264.4A patent/EP2987759B1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2987759A1 (de) | 2016-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3784616B1 (de) | Kran und verfahren zum steuern eines solchen krans | |
| EP3649072B1 (de) | Kran und verfahren zum steuern eines solchen krans | |
| EP4013713B1 (de) | Kran und verfahren zum steuern eines solchen krans | |
| EP2987759B1 (de) | Kran mit definierter Pendelbewegung bei Erreichen eines Zielorts | |
| DE60208952T2 (de) | Krane und Verfahren zum Steuern des Kranes | |
| EP3409636B1 (de) | Verfahren zum dämpfen von drehschwingungen eines lastaufnahmeelements einer hebeeinrichtung | |
| DE102012220036A1 (de) | Bewegungssystem, das ausgestaltet ist, um eine nutzlast inmehrere richtungen zu bewegen | |
| DE102015100669B4 (de) | Anti-pendel-steuerverfahren mit einstellbarer unterstützung für den transport einer schwebenden last | |
| EP3408208B1 (de) | Kran und verfahren zum steuern eines solchen krans | |
| DE102012220035B4 (de) | Bewegungssystem, das ausgestaltet ist, um eine nutzlast zu bewegen | |
| WO2004031065A2 (de) | Verfahren und vorrichtung zur positionierung einer last | |
| EP3556969A1 (de) | Betonpumpe | |
| EP3873844B1 (de) | Kollisionsfreie wegführung einer an einem seil hängenden last | |
| EP4186847B1 (de) | Trajektorienplanung mit flexibler umplanungsfunktionalität - geänderter endpunkt | |
| EP4186848B1 (de) | Trajektorienplanung mit flexibler umplanungsfunktionalität - hindernis | |
| DE102016105658A1 (de) | Anhängerrücksetzhilfe durch geschwindigkeitsbegrenzung mittels bremsen | |
| EP2902356B1 (de) | Kran mit aktiver Dämpfung von Pendelbewegungen der Last | |
| DE102015208577A1 (de) | Verfahren zur Ansteuerung eines Knickmasts in einem Großmanipulator | |
| EP3556968A1 (de) | Betonpumpe | |
| AT501509A1 (de) | Verfahren und positionsregelungseinrichtung zur steuerung des betriebes einer lasttragvorrichtung | |
| EP3487803A1 (de) | Betriebsverfahren für eine krananlage, insbesondere für einen containerkran | |
| EP2977343B1 (de) | Kran mit aktiver Dämpfung von Pendelbewegungen der Last | |
| DE19918449C2 (de) | Lasthebesystem zur Feinpositionierung und aktiven Schwingungsdämpfung | |
| DE102005002192B4 (de) | Verfahren zum Betrieb einer Krananlage, insbesondere eines Containerkrans, sowie Krananlage, insbesondere Containerkran | |
| EP2878567A1 (de) | Verfahren zur Bestimmung zumindest eines Pendelwinkels einer von einer Lasttransportvorrichtung aufgenommenen Last sowie Verfahren zur Dämpfung von Pendelbewegungen der Last |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20150505 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160609 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 845702 Country of ref document: AT Kind code of ref document: T Effective date: 20161215 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014001970 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170216 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170217 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170316 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014001970 Country of ref document: DE |
|
| RAP2 | Party data changed (patent owner data changed or rights of a patent transferred) |
Owner name: SIEMENS AKTIENGESELLSCHAFT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170216 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCOW Free format text: NEW ADDRESS: WERNER-VON-SIEMENS-STRASSE 1, 80333 MUENCHEN (DE) Ref country code: CH Ref legal event code: NV Representative=s name: SIEMENS SCHWEIZ AG, CH |
|
| 26N | No opposition filed |
Effective date: 20170817 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180430 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20180818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180818 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170316 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 845702 Country of ref document: AT Kind code of ref document: T Effective date: 20190818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190818 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20250811 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20251020 Year of fee payment: 12 |