EP3000942B1 - Appareil de battage et procédé de battage d'un élément de pieu dans le sol - Google Patents
Appareil de battage et procédé de battage d'un élément de pieu dans le sol Download PDFInfo
- Publication number
- EP3000942B1 EP3000942B1 EP14186393.6A EP14186393A EP3000942B1 EP 3000942 B1 EP3000942 B1 EP 3000942B1 EP 14186393 A EP14186393 A EP 14186393A EP 3000942 B1 EP3000942 B1 EP 3000942B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- winch
- pile element
- pile
- driving
- auxiliary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D7/00—Methods or apparatus for placing sheet pile bulkheads, piles, mouldpipes, or other moulds
- E02D7/02—Placing by driving
- E02D7/06—Power-driven drivers
- E02D7/08—Drop drivers with free-falling hammer
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D11/00—Methods or apparatus specially adapted for both placing and removing sheet pile bulkheads, piles, or mould-pipes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02B—HYDRAULIC ENGINEERING
- E02B7/00—Barrages or weirs; Layout, construction, methods of, or devices for, making same
- E02B7/02—Fixed barrages
- E02B7/04—Dams across valleys
- E02B7/08—Wall dams
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D13/00—Accessories for placing or removing piles or bulkheads, e.g. noise attenuating chambers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D7/00—Methods or apparatus for placing sheet pile bulkheads, piles, mouldpipes, or other moulds
- E02D7/02—Placing by driving
- E02D7/06—Power-driven drivers
- E02D7/10—Power-driven drivers with pressure-actuated hammer, i.e. the pressure fluid acting directly on the hammer structure
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D7/00—Methods or apparatus for placing sheet pile bulkheads, piles, mouldpipes, or other moulds
- E02D7/02—Placing by driving
- E02D7/06—Power-driven drivers
- E02D7/12—Drivers with explosion chambers
- E02D7/125—Diesel drivers
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B15/00—Supports for the drilling machine, e.g. derricks or masts
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/02—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D7/00—Methods or apparatus for placing sheet pile bulkheads, piles, mouldpipes, or other moulds
- E02D7/02—Placing by driving
- E02D7/06—Power-driven drivers
Definitions
- the invention relates to a pile driver for driving a pile element into the ground with a mast, a driven hammer unit, which is movably mounted along the mast and has a driving hood in a lower region, which is designed to receive a head region of the pile element to be excavated, a main winch Main rope, which is connected to the hammer unit for moving the hammer unit along the mast, and an auxiliary winch with auxiliary rope, which is guided over the mast and is connectable to a prominent pile element, said means of the auxiliary winch Conceptrammende the pile element from a lying position in an approximately vertical ramming position can be erected, wherein the head portion of the pile element is received in the driving hood of the hammer unit, according to the preamble of claim 1.
- the invention further relates to a method for driving a pile element into the ground, wherein a head region of the pile element is arranged in a driving hood on a lower side of a driven hammer unit, which is moved by a main winch with a main rope along a mast and the pile element in an approximately vertical Rammposition rammed into the ground, wherein the pile element is set by means of an auxiliary winch with auxiliary rope from a lying position in the approximately vertical ramming position, in which the head portion of the pile element is received in the ramming hood of the hammer unit, according to the preamble of claim.
- Such piling devices and such methods are for example from the DE 100 37 192 A2 known and used in foundation measures in which pile elements are driven into a relatively soft soil.
- the pile driver on a hammer unit which depends on the drive may be a so-called diesel hammer or a hydraulic hammer.
- the hammer unit generates impact pulses which are applied to the head area of a pile element so that the pile element is driven into the ground.
- the pile elements which are usually formed of steel or concrete, must first be placed from a typically lying transort or storage position in the vertical operating or piling position.
- an auxiliary winch with an auxiliary rope located on the mast of the piling an auxiliary winch with an auxiliary rope, the free end is mounted in an upper region of the pile element, so that the pile element can be placed from the lying position with the auxiliary winch in the vertical ramming position.
- the invention has for its object to provide a piling device and a method for driving a pile element; with which an efficient and particularly safe operation is possible.
- the piling apparatus is characterized in that a control device for simultaneously controlling the main winch and the auxiliary winch is provided and that the main winch and the auxiliary winch are controlled by the control device when setting up the pile element to be excavated so that the hammer unit passes from a lower initial position on the mast the main winch is movable and the head portion of the pile element rests during deployment by means of the auxiliary winch on the Rammhaube with a predeterminable pressure force.
- a first aspect of the invention consists in that, when the pile element is set up from a lying position into the ramming position, a head region of the pile element rests in a defined manner on the ramming hood of the hammer unit.
- the pile element is always in contact with the ground on the one hand and on the other hand with the Rammhaube. Through this multiple contact the risk of swinging the pile element during erection is effectively prevented.
- the predeterminable pressure force is not a single force value, but preferably a force value range which is predetermined by a lower minimum value and an upper maximum value. The minimum value must be so large that the Pile element safely remains on the Rammhaube during deployment, while the maximum value is selected so that the driving force is not damaged by the pressure force.
- control device has an input device for adjusting the pressing force.
- the input device may expediently be a simple controller or a potentiometer with which an operator controls the auxiliary winch and / or the main winch so that a desired pressure force of the pile element is effected on the driving hood.
- default buttons can also be preset with standard pressure force values.
- the winches can be driven arbitrarily.
- a particularly expedient embodiment of the invention results from the fact that the main winch and the auxiliary winch each have a hydraulic motor and that the supply of hydraulic fluid in one of the hydraulic motors or in both hydraulic motors for adjusting the pressing force is controlled by the control device.
- hydraulic motors are particularly compact and enable efficient force application.
- the control by changing the supply of hydraulic fluid to a hydraulic motor, such as by changing the flow rate or the hydraulic pressure, on the other hand allow fast and accurate control of the winch drives.
- a hydraulic pressure control valve is arranged, which can be actuated via the control device.
- the hydraulic pressure control valve is only in the supply to a hydraulic motor, in particular to the hydraulic motor of the main winch.
- the auxiliary winch with a greater rotational speed and / or tensile force is operated as the rotational speed or tensile force of the main winch.
- This ensures that the pile element always rests reliably with the desired pressure force on the Rammhaube the hammer unit.
- the auxiliary winch is to be controlled or adjusted so that a tip of the pile element is supported on the ground.
- control device has a switch with which can be switched between a single control of main winch and auxiliary winch and a common automatic control.
- the control device may have a portable manual unit, on which the input device and the switch are arranged. It is thus possible for an operator to continue to operate and adjust the main winch and thus the hammer unit and the auxiliary winch and thus the pile element independently of each other. However, for a safe and reliable deployment, the operator may switch to the automatic control so that after an initial adjustment and application of the head portion of the pile element to the ram, automatic deployment and threading of the pile element to the hammer unit is performed.
- the method according to the invention for driving a pile element into the ground is characterized in that the main winch and the auxiliary winch are simultaneously automatically controlled by a control device when setting up the pile element to be pierced, so that the head area of the pile element rests with a predeterminable pressure force during the erection of the pile cap ,
- the method can be carried out in particular by the piling device described above. It can be achieved with the method according to the invention, the advantages described above.
- a fixed predetermined pressure force can be stored in the control device. It is preferred according to a variant of the invention that the pressing force is adjusted by means of the control device. This can be done via a controller, in particular a potentiometer, or via a numeric input field.
- the pressure force can be adapted to different sizes and weights of the pile element.
- an advantageous embodiment of the invention is that for adjusting the pressing force, the auxiliary winch operated and the pile element is pressed against the driving hood, while the main winch is stationary and the hammer unit is in a lower initial position on the mast and then by the Steuereinrichturig the Main winch and the auxiliary winch are operated, the hammer unit is moved from the lower initial position along the mast in an upper ramming position, while the pile element is pressed continuously against the driving hood.
- the adjustment of the pressure force can thus be done in practice by the operator by a simple adjustment and pressing the pile element to the driving hood, while the hammer unit is in a lower initial position on the mast.
- a measuring device in particular a sensor device, can be provided on the winch or the ram hood, with which the instantaneous contact pressure force is displayed.
- a measuring device is not absolutely necessary.
- the hammer unit is controlled by the main winch moves upward, while the pile element by the synchronously controlled auxiliary winch continues to push the pile element against the upwardly moving hammer unit until the pile element the reached vertical end position and threaded into the cylindrical receiving space of the cup-shaped Rammhaube.
- the drive of the two winches is then stopped.
- the hammer unit is lowered relative to the piling member until a sufficient impact contact area between the piling cap and the top head portion of the pile member is achieved. In the ramming position, the hammer unit can then be put into operation and the pile element can be driven into the ground while moving the hammer unit downwards.
- a further preferred variant of the method according to the invention consists in that, during setting up, a supply of hydraulic fluid to a hydraulic motor of the main winch and / or the auxiliary winch is controlled. This allows a particularly accurate and fast control of the winch operation.
- the auxiliary winch is operated at a predetermined speed and / or tensile force and that for generating the pressing force, the main winch is operated with a speed and / or traction force that can be set by the control device.
- the auxiliary winch thus has a predetermined fixed setting.
- the pressing force is adjusted by a corresponding adjustment of the speed and / or the tensile force of the main winch with the main rope on the controller.
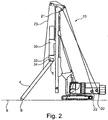
- FIGS. 1 to 3 the course of a method according to the invention is explained, which is carried out on a piling device 10 according to the invention.
- the pile driver 10 has a crawler undercarriage 12 and an upper carriage 14 rotatably mounted thereon.
- a mast 16 with mast head 17 is mounted in a known manner via a Anlenkkinematik 18 with actuating cylinder 19 adjustable. In operating position, the mast 16 is in a vertical orientation, which in Fig. 1 is shown.
- a non-illustrated linear guide is provided, along which a hammer unit 30 is guided and supported vertically displaceable.
- a main winch 20 is arranged in the uppercarriage 14, which is connected to the hammer unit 30 via a main cable 21 guided via the mast head 17.
- the main winch 20 is driven by a hydraulic motor, not shown.
- the hammer unit 30 has, in a known manner, a striker unit, which is driven by a percussion drive, such as a diesel engine or a hydraulic drive, to generate impact pulses.
- a percussion drive such as a diesel engine or a hydraulic drive
- the approximately cylindrical receiving space 34 is open at the bottom.
- the receiving space 34 is designed to receive a head region 5 of a pile element 4 to be engraved in order to transfer the impact pulses generated by the hammer unit 30 to the pile element 4 via the driving cap 32.
- an auxiliary winch 22 with an auxiliary cable 23 is provided on the superstructure 14 in addition to the main winch 20, which is guided via rollers on the mast head 17.
- the free end of the auxiliary cable 23 is fixed in a conventional manner, such as a hook means in an upper region of the pile element 4 at this.
- the hammer unit 30 is moved on the mast 16 in a lower initial position, which approximately in Fig. 1 is shown.
- the auxiliary winch 22 driven by a hydraulic motor by an operator, the head portion 5 of the pile member 4 is raised, while a tip 6 of the pile member 4 is supported on the ground 8.
- the pile element 4 is raised with the auxiliary winch 22 in a single control by an operator until the head portion 5 of the pile element 4 rests against the underside of the Rammhaube 32 with a desired pressure force.
- the pressing force can be predetermined by the operator on the basis of his experience or determined and adjusted by means of a measuring device with a force-measuring sensor on the auxiliary winch 22.
- an automatic control program is activated in the control device of the piling device 10, through which now the main winch 20 and the auxiliary winch 22 are operated defined for erecting the pile element 4.
- the main cable 21 and the auxiliary cable 23 are pulled in synchronized with each other synchronously, so that the hammer unit 30 moves along the mast 16 upwards.
- the pile element 4 is pulled upwards by the auxiliary cable 23, whereby the control takes place in such a way that the head region 5 of the pile element 4 always rests against the driving hood 32 with the desired pressure force. Since the pile element 4 continues to be supported by the tip 6 at the bottom 8, it is prevented by this double support of the pile element 4 during the erection that the pile element 4 gets into an undesirable swing.
- the up-pulling of the pile element 4 and the hammer unit 30 takes place until the in Fig. 3 shown operating and piling position is reached.
- the pile element 4 In the ramming position, the pile element 4 is arranged approximately vertically and the head region 5 of the pile element 4 is suitably received in the receiving space 34 of the driving hood 32.
- a guide and retaining claw 36 which is attached to a lower portion of the mast 16, be pivoted to the pile element 4 in order to additionally guide this during subsequent ramming.
- the pile member 4 can be driven to a desired depth in the bottom 8.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Engineering & Computer Science (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Paleontology (AREA)
- Geology (AREA)
- Physics & Mathematics (AREA)
- Environmental & Geological Engineering (AREA)
- Fluid Mechanics (AREA)
- Geochemistry & Mineralogy (AREA)
- Mechanical Engineering (AREA)
- Placing Or Removing Of Piles Or Sheet Piles, Or Accessories Thereof (AREA)
Claims (11)
- Appareil de battage pour enfoncer un élément de pieu (4) dans le sol (8), comportant :- un mât (16),- une unité de percussion (30) entraînée, qui est mise en place en pouvant être déplacée le long du mât (16) et qui comprend, dans une zone inférieure, un capot de battage (32) qui est agencé pour recevoir une zone de tête (5) de l'élément de pieu (4) devant être enfoncé,- un treuil principal (20) avec un câble principal (21), qui est relié à l'unité de percussion (30) pour le déplacement de l'unité de percussion (30) le long du mât (16), et- un treuil auxiliaire (22) avec un câble auxiliaire (23), qui est guidé au-dessus du mât (16) et qui peut être relié à un élément de pieu (4) devant être enfoncé, l'élément de pieu (4) devant être enfoncé pouvant, au moyen du treuil auxiliaire (22), être relevé depuis une position couchée vers une position de battage sensiblement verticale dans laquelle la zone de tête (5) de l'élément de pieu (4) est reçue à l'intérieur du capot de battage (32) de l'unité de percussion (30),caractérisé :- en ce qu'un dispositif de commande est prévu pour la commande automatique simultanée du treuil principal (20) et du treuil auxiliaire (22), et- en ce que, lors du relevage de l'élément de pieu (4) devant être enfoncé, le treuil principal (20) et le treuil auxiliaire (22) sont commandés par le dispositif de commande de telle sorte que l'unité de percussion (30) peut être déplacée au moyen du treuil principal (20) à partir d'une position initiale inférieure sur le mât (16) et que la zone de tête (5) de l'élément de pieu (4) est appliquée, pendant le levage au moyen du treuil auxiliaire (22), contre le capot de battage (32) avec une force de pression prédéfinie.
- Appareil de battage selon la revendication 1,
caractérisé :en ce que le dispositif de commande comprend un dispositif d'entrée pour le réglage de la force de pression. - Appareil de battage selon la revendication 1 ou 2,
caractérisé :en ce que le treuil principal (20) et le treuil auxiliaire (22) comprennent chacun un moteur hydraulique, eten ce que, pour le réglage de la force de pression, on commande à l'aide du dispositif de commande l'alimentation en fluide hydraulique de l'un des moteurs hydrauliques ou des deux moteurs hydrauliques. - Appareil de battage selon la revendication 3,
caractérisé :en ce que, pour la commande d'au moins un moteur hydraulique, on dispose dans une conduite d'alimentation une soupape de réglage de pression hydraulique, qui peut être actionnée par le dispositif de commande. - Appareil de battage selon une des revendications 1 à 4,
caractérisé :en ce que, lors du relevage de l'élément de pieu (4), le treuil auxiliaire (22) fonctionne avec une vitesse de rotation et/ou une force de traction supérieure(s) à la vitesse de rotation ou, respectivement, à la force de traction du treuil principal (20). - Appareil de battage selon une des revendications 1 à 5,
caractérisé :en ce que le dispositif de commande comprend un commutateur, avec lequel une commutation est possible entre une commande individuelle du treuil principal (20) et du treuil auxiliaire (22) et une commande automatique simultanée. - Procédé pour enfoncer un élément de pieu (4) dans le sol (8), en particulier avec un dispositif de battage (10) selon une des revendications 1 à 6,
selon lequel une zone de tête (5) de l'élément de pieu (4) est disposée dans un capot de battage (32) à la partie inférieure d'une unité de percussion (30) entraînée, qui est déplacée le long d'un mât (16) au moyen d'un treuil principal (20) avec un câble principal (21) et qui enfonce l'élément de pieu (4) dans le sol (8) dans une position de battage sensiblement verticale, l'élément de pieu (4) étant, au moyen d'un treuil auxiliaire (22) avec un câble auxiliaire (23), relevé depuis une position couchée jusque dans une position de battage sensiblement verticale dans laquelle la zone de tête (5) de l'élément de pieu (4) est reçue à l'intérieur du capot de battage (32) de l'unité de percussion (30),
caractérisé :en ce que, lors du relevage de l'élément de pieu (4) devant être enfoncé, le treuil principal (20) et le treuil auxiliaire (22) sont simultanément commandés de manière automatique par un dispositif de commande de telle sorte que la zone de tête (5) de l'élément de pieu (4) est appliquée, pendant le levage, contre le capot de battage (32) avec une force de pression prédéfinie. - Procédé selon la revendication 7,
caractérisé :en ce que la force de pression est réglée au moyen du dispositif de commande. - Procédé selon la revendication 8,
caractérisé :en ce que, pour le réglage de la force de pression, on actionne le treuil auxiliaire (22) et l'élément de pieu (4) est en appui contre le capot de battage (32), pendant que le treuil principal (20) est à l'arrêt et que l'unité de percussion (30) se trouve dans une position initiale inférieure sur le mât (16), eten ce que le treuil principal (20) et le treuil auxiliaire (22) sont ensuite actionnés par le dispositif de commande, de telle sorte que l'unité de percussion (30) est déplacée depuis la position initiale inférieure le long du mât (16) jusque dans une position de battage supérieure, pendant que l'élément de pieu (4) est en appui de manière continue contre le capot de battage (32). - Procédé selon une des revendications 7 à 9,
caractérisé :en ce que, pendant le levage, on commande une alimentation en fluide hydraulique vers un moteur hydraulique du treuil principal (20) et/ou du treuil auxiliaire (22). - Procédé selon une des revendications 7 à 10,
caractérisé :en ce que le treuil auxiliaire (22) fonctionne avec une vitesse et/ou une force de traction prédéfinie(s), eten ce que, pour la production de la force de pression, le treuil principal (20) fonctionne avec une vitesse et/ou une force de traction qui peut(peuvent) être réglée(s) par le dispositif de commande.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DK14186393.6T DK3000942T3 (en) | 2014-09-25 | 2014-09-25 | Dispensing device and method for impounding a pile element in the ground |
| EP14186393.6A EP3000942B1 (fr) | 2014-09-25 | 2014-09-25 | Appareil de battage et procédé de battage d'un élément de pieu dans le sol |
| ES14186393.6T ES2626780T3 (es) | 2014-09-25 | 2014-09-25 | Aparato de hincado y procedimiento para hincar un elemento de pilote en el suelo |
| RU2015137964A RU2633454C2 (ru) | 2014-09-25 | 2015-09-07 | Сваебойная машина и способ забивки свайных элементов в грунт |
| US14/864,599 US9464398B2 (en) | 2014-09-25 | 2015-09-24 | Pile-driving apparatus and method for driving a pile element into the ground |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14186393.6A EP3000942B1 (fr) | 2014-09-25 | 2014-09-25 | Appareil de battage et procédé de battage d'un élément de pieu dans le sol |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3000942A1 EP3000942A1 (fr) | 2016-03-30 |
| EP3000942B1 true EP3000942B1 (fr) | 2017-03-15 |
Family
ID=51589213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14186393.6A Active EP3000942B1 (fr) | 2014-09-25 | 2014-09-25 | Appareil de battage et procédé de battage d'un élément de pieu dans le sol |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9464398B2 (fr) |
| EP (1) | EP3000942B1 (fr) |
| DK (1) | DK3000942T3 (fr) |
| ES (1) | ES2626780T3 (fr) |
| RU (1) | RU2633454C2 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111622220A (zh) * | 2020-06-05 | 2020-09-04 | 浙江广厦建设职业技术学院 | 一种土木施工用打桩装置 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SG11201908187QA (en) * | 2017-03-13 | 2019-10-30 | Giken Ltd | Pile press-in machine and pile press-in method |
| JP6562364B2 (ja) * | 2017-11-10 | 2019-08-21 | 五洋建設株式会社 | 管杭の吊り起こし装置及び管杭の吊り起こし方法 |
| US20190264411A1 (en) * | 2018-02-23 | 2019-08-29 | Clark Equipment Company | Post driving implement |
| EP3708714B1 (fr) * | 2019-03-13 | 2021-01-13 | BAUER Maschinen GmbH | Dispositif de fixation permettant de fixer un élément de génie civil et procédé de génie civil |
| IT201900013833A1 (it) * | 2019-08-02 | 2021-02-02 | Orteco S R L | Apparecchiatura per l’infissione di pali nel terreno |
| US10954645B2 (en) * | 2019-08-23 | 2021-03-23 | Christopher DeBlauw | System and apparatus for driving piles |
| RU201332U1 (ru) * | 2020-07-23 | 2020-12-09 | Андрей Александрович Щербина | Сваебойка |
| IT202000025255A1 (it) * | 2020-10-26 | 2022-04-26 | Soilmec Spa | Macchina da fondazioni e metodo per il controllo di tale macchina |
| IT202000030965A1 (it) * | 2020-12-16 | 2022-06-16 | Orteco S R L | Macchina per l’infissione di pali nel terreno |
| CA3109696A1 (fr) * | 2021-02-19 | 2022-08-19 | Jason Linley | Combinaison de mat et de grappin |
| JP7661120B2 (ja) | 2021-05-13 | 2025-04-14 | 株式会社技研製作所 | 杭吊上補助具 |
| RU210391U1 (ru) * | 2021-10-15 | 2022-04-14 | Общество с ограниченной ответственностью «Техноперспектива» | Сваебойная машина |
| CN114592517B (zh) * | 2022-03-21 | 2023-03-21 | 浙江大学 | 带扩大桩靴桩身自重锤击施工工艺 |
| CN115467330B (zh) * | 2022-07-29 | 2024-11-01 | 武汉理工大学 | 一种沉桩消声装置及安装方法 |
| CN116024972A (zh) * | 2023-01-06 | 2023-04-28 | 华电重工股份有限公司 | 一种打桩设备和打桩系统 |
| EP4671449A1 (fr) * | 2024-06-26 | 2025-12-31 | ABI Anlagentechnik-Baumaschinen-Industriebedarf Maschinenfabrik und Vertriebsgesellschaft mbH | Dispositif et procédé de sécurisation d'un élément de construction souterraine sur une machine de construction souterraine |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2134989A (en) * | 1936-05-11 | 1938-11-01 | John B Templeton | Pile-driving attachment for booms |
| GB771037A (en) * | 1954-06-30 | 1957-03-27 | Landsverk Ab | A method and a device for pile driving by means of a self-propelled pile driver |
| GB938592A (en) * | 1960-08-24 | 1963-10-02 | Lehane Mackenzie & Shand Ltd | Improvements relating to piling frames |
| SE305629B (fr) * | 1965-04-26 | 1968-10-28 | J Johansson | |
| SU372321A1 (ru) * | 1970-09-28 | 1973-03-01 | Авторы изобретени витель | УСТРОЙСТВО дл БУРЕНИЯ СКВАЖИН |
| US3827508A (en) * | 1973-01-05 | 1974-08-06 | Foundation Equipment Corp | Mechanical safety pile monkey |
| JPS5431605B2 (fr) * | 1974-09-24 | 1979-10-08 | ||
| SU909013A1 (ru) * | 1979-12-20 | 1982-02-28 | Всесоюзный конструкторско-технологический институт по механизации монтажных и специальных строительных работ | Свайный копер |
| SU1188245A1 (ru) * | 1983-07-01 | 1985-10-30 | Сыктывкарское Проектно-Конструкторское Технологическое Бюро Минлеспрома Ссср | Свайный копер |
| DE3328159A1 (de) * | 1983-08-04 | 1985-02-14 | Martin Oetken GmbH & Co KG, 2900 Oldenburg | Rammgeraet mit von einem baggerausleger gehaltenen haenge-senk-maekler |
| SU1357500A1 (ru) * | 1985-11-26 | 1987-12-07 | Tsytlenok Aleksandr L | Устройство дл погружени свай |
| SU1628606A1 (ru) * | 1989-07-28 | 1996-10-10 | Дальневосточный научно-исследовательский, проектно-конструкторский и технологический институт по строительству | Копровая установка |
| SU1760015A1 (ru) * | 1990-11-16 | 1992-09-07 | Всесоюзное проектно-изыскательское и научно-исследовательское объединение "Гидропроект" им.С.Я.Жука | Копрова установка |
| US5375664A (en) * | 1993-06-15 | 1994-12-27 | Mcdowell; Michael M. | Pile driver |
| US7198115B2 (en) * | 2004-05-06 | 2007-04-03 | Cruz Construction Corp. | Lead alignment attachment |
| CA2468358C (fr) * | 2004-06-18 | 2005-05-03 | Subterranean Ltd. | Methode d'installation de pieu avec marteau de fond |
| US7575398B2 (en) * | 2006-08-17 | 2009-08-18 | Deep Foundations Contractors, Inc | Automatic spotter with electronic control system for pile driving and continuous flight auger drilling leads |
-
2014
- 2014-09-25 EP EP14186393.6A patent/EP3000942B1/fr active Active
- 2014-09-25 ES ES14186393.6T patent/ES2626780T3/es active Active
- 2014-09-25 DK DK14186393.6T patent/DK3000942T3/en active
-
2015
- 2015-09-07 RU RU2015137964A patent/RU2633454C2/ru active
- 2015-09-24 US US14/864,599 patent/US9464398B2/en not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| None * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111622220A (zh) * | 2020-06-05 | 2020-09-04 | 浙江广厦建设职业技术学院 | 一种土木施工用打桩装置 |
| CN111622220B (zh) * | 2020-06-05 | 2021-06-29 | 浙江广厦建设职业技术学院 | 一种土木施工用打桩装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2015137964A (ru) | 2017-03-13 |
| RU2633454C2 (ru) | 2017-10-12 |
| US20160090707A1 (en) | 2016-03-31 |
| EP3000942A1 (fr) | 2016-03-30 |
| DK3000942T3 (en) | 2017-06-12 |
| ES2626780T3 (es) | 2017-07-26 |
| US9464398B2 (en) | 2016-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3000942B1 (fr) | Appareil de battage et procédé de battage d'un élément de pieu dans le sol | |
| EP3705629B1 (fr) | Dispositif de battage et procédé de battage dans un sol | |
| EP2975208A2 (fr) | Engin et procédé de commande d'un engin | |
| EP3670753B1 (fr) | Dispositif de battage et procédé de battage de pieux | |
| DE2542012C3 (de) | Vorrichtung zum Eintreiben eines Rammpfahles | |
| EP3084537B1 (fr) | Procédé de commande d'un appareil comprenant un dispositif d'outil ainsi qu'un dispositif d'avance motorisée | |
| DE10320946A1 (de) | Seilwindenanordnung und Verfahren zu deren Betrieb | |
| EP3269882B1 (fr) | Dispositif de battage de pieux | |
| DE2535865C3 (de) | Vorrichtung zum Eintreiben von Spundbohlen | |
| DE3634905C2 (fr) | ||
| EP3911801A1 (fr) | Arrangement vibrateur pour l'amélioration du sol de fondation | |
| EP3091173B1 (fr) | Installation de forage déstinée à produire où à élargir un forage terrestre dans la terre et procédé de commande d'un dispositif d'avance d'une telle installation de forage | |
| DE202007004424U1 (de) | Eine Zugvorrichtung | |
| DE102012109332A1 (de) | Verfahren und Vorrichtung zum Herstellen von im Boden eingelassenen Ortbetonstrukturen | |
| DE1951292A1 (de) | Vorrichtung zum Einrammen und/oder Ausziehen von Pfaehlen | |
| EP4215717B1 (fr) | Machine de construction et procédé de fonctionnement d'une machine de construction | |
| EP3415708A1 (fr) | Dispositif de forage | |
| EP0900884B1 (fr) | Sonnette, en particulier pour sondage par percussion | |
| JP2008214937A (ja) | 杭圧入打ち抜き装置 | |
| EP2439164A1 (fr) | Machine de travail dotée d'une fonction de burin | |
| DE2732117A1 (de) | Verfahren und vorrichtung zum geraeusch- und vibrationsfreien setzen eines pfeilers | |
| DE2934310A1 (de) | Vorrichtung zum fuehren von rammgut, insbesondere bohlen, kanaldielen u.dgl., am maekler eines rammgeraets | |
| DE3742262C2 (fr) | ||
| EP4717821A1 (fr) | Engin de construction et procédé d'introduction de béton frais dans un puits de forage à l'aide d'un tuyau à couler | |
| EP1783281A1 (fr) | Machine pour porter des foreurs du sol |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20150429 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160901 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| INTC | Intention to grant announced (deleted) | ||
| GRAR | Information related to intention to grant a patent recorded |
Free format text: ORIGINAL CODE: EPIDOSNIGR71 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| INTG | Intention to grant announced |
Effective date: 20170104 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 875716 Country of ref document: AT Kind code of ref document: T Effective date: 20170415 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014002991 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20170606 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20170315 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2626780 Country of ref document: ES Kind code of ref document: T3 Effective date: 20170726 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170616 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170615 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170717 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170715 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014002991 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20171218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502014002991 Country of ref document: DE Representative=s name: WUNDERLICH & HEIM PATENTANWAELTE PARTNERSCHAFT, DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170925 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170925 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171002 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170315 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NO Payment date: 20230907 Year of fee payment: 10 Ref country code: IT Payment date: 20230908 Year of fee payment: 10 Ref country code: GB Payment date: 20230907 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20230907 Year of fee payment: 10 Ref country code: DK Payment date: 20230905 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20231004 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240913 Year of fee payment: 11 Ref country code: FI Payment date: 20240916 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240918 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20240916 Year of fee payment: 11 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: UPC_APP_110779/2023 Effective date: 20230510 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20240930 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20240925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240926 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20251105 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240926 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250925 |