EP3430347B1 - Machine de lancement d'au moins une cible - Google Patents
Machine de lancement d'au moins une cible Download PDFInfo
- Publication number
- EP3430347B1 EP3430347B1 EP17709723.5A EP17709723A EP3430347B1 EP 3430347 B1 EP3430347 B1 EP 3430347B1 EP 17709723 A EP17709723 A EP 17709723A EP 3430347 B1 EP3430347 B1 EP 3430347B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- target
- arm
- launching
- finger
- machine according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41J—TARGETS; TARGET RANGES; BULLET CATCHERS
- F41J9/00—Moving targets, i.e. moving when fired at
- F41J9/16—Clay-pigeon targets; Clay-disc targets
- F41J9/18—Traps or throwing-apparatus therefor
- F41J9/20—Traps or throwing-apparatus therefor with spring-operated throwing arm
- F41J9/24—Traps or throwing-apparatus therefor with spring-operated throwing arm cocked by electromechanical means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41J—TARGETS; TARGET RANGES; BULLET CATCHERS
- F41J9/00—Moving targets, i.e. moving when fired at
- F41J9/16—Clay-pigeon targets; Clay-disc targets
- F41J9/18—Traps or throwing-apparatus therefor
- F41J9/20—Traps or throwing-apparatus therefor with spring-operated throwing arm
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41J—TARGETS; TARGET RANGES; BULLET CATCHERS
- F41J9/00—Moving targets, i.e. moving when fired at
- F41J9/16—Clay-pigeon targets; Clay-disc targets
- F41J9/18—Traps or throwing-apparatus therefor
- F41J9/30—Traps or throwing-apparatus therefor characterised by using a magazine of targets
Definitions
- the present invention relates in particular to a machine for launching at least one target making it possible to launch said target along a precise and repeated trajectory.
- a target launch device is known from the document. FR3016208 A1 .
- a preferred application relates to the shooting sport industry and in particular to balltrap.
- target launching machines are well known.
- the target launching machine only needs a launching plate, a launching arm and possibly a guide element to guide the target.
- These stationary machines thus integrate, for example, a movable stop and a guide element.
- the main function of the mobile stop is to keep the target applied to the launch arm by means of a return spring. Maintaining the target on the launching arm makes it possible to avoid shocks liable to break the target during the sudden acceleration of the arm for ejecting the target.
- the invention overcomes all or part of the drawbacks of current techniques.
- the invention relates to a launching machine as described in claim 1.
- this machine is such that the launching arm comprises a finger provided with a contact part configured to be applied on a fourth portion of the periphery of the target in the armed position, the fourth portion being distinct from the first, second and third portions.
- This arrangement advantageously makes it possible to apply a fourth constraint to the target.
- This constraint will force the target to position itself at a precise position along the launching arm. And those little important the shape of the periphery of the target, or the launching plate. The force exerted by the launching finger thus makes it possible to avoid the effects of suction cups, for example when the launching plate is wet.
- the invention also relates to a machine in which the contact part is configured to exert pressure on the target having a non-zero component towards the guide element.
- the contact part will push the target against the guide element.
- the target finds itself in abutment against the guide element, the launching arm and the finger.
- the precise position allowing this simultaneous contact is unique.
- the target is always positioned in the same place of the launching arm.
- the invention relates to a machine for launching at least one target having a reproducible ejection trajectory.
- the object of the invention is thus to precisely control the ejection trajectory of the target.
- the target launching machine thus advantageously comprises a launching plate 100 and a launching arm 200 as well as at least one target 300.
- the targets 300 are included in a store (not visible in the figures).
- This store can in particular be a barrel with several columns in stack of targets.
- the machine can carry a large number of targets 300. This is particularly useful during competitions or hunting routes.
- the store supplies the launch arm 200 with a single target 300 at a time. Examples of components of the invention are given below, without implied limitation.
- the target 300 may be of the “clay pigeon” type and is preferably capable of being broken when the shooter reaches it.
- the target 300 includes a periphery 301, a lower face and an upper face of the target 302.
- the target is based on resins.
- the periphery 301 of the target 300 corresponds to the connecting portion between the lower face and the upper face of the target 302.
- the periphery 301 of the target corresponds to the thickness dimension of the target 300.
- the upper 302 and lower faces are parallel.
- the upper face 302 and the lower face of the target are of identical diameters.
- the periphery 301 is advantageously included in a plane perpendicular to the plane comprising the upper 302 and lower faces of the target 300.
- the upper face 302 has a diameter less than that of the lower face.
- the periphery 301 may be circular and of straight section or not.
- the edge portion 301 is not straight it can advantageously comprise at least one step and preferably a succession of steps, configured to reduce the diameter of the edge in the direction of the upper face.
- the launching support comprises a launching plate 100, a movable stop 110 and a guide element 120.
- the launching plate 100 comprises a distal border 103, a proximal border 104, a first part 101, a second part 102, an internal border 105, and an external border 106
- the launching plate 100 is flat. It advantageously comprises a first part 101 and a second part 102.
- the second part 102 preferably comprises the distal edge 103 of the launching plate 100, said distal edge 103 corresponding to the end not connected to the machine.
- the second part 102 is smooth. The aim here is to avoid trajectory deviations as much as possible due to obstacles or roughness.
- the second part 102 is made of stainless steel or steel with a zinc coating.
- the first part 101 is connected to the machine. It advantageously comprises the proximal end of the launching plate 104. It is said first part 101 which will receive the target 300 when supply from the store, and it is also this first part 101 which will advantageously support the movable stop 110 and the guide element 120. In other embodiments of the invention, the movable stop 110 and the element guide 120 are carried by the chassis of the machine and not by the launching plate 100.
- the launching plate 100 is preferably made of metal, or of a metal alloy.
- the plate can be made of steel, aluminum or composite materials.
- the launching plate 100 has a substantially bent shape. This angled shape allows the target 300 to have a support during the entire rotation of the launch arm 200.
- the launch plate 100 has a different shape. It can for example be of a diamond shape.
- the edges extending between the distal edge 103 and the proximal edge 104 are not of identical sizes.
- the inner border 105 will be called, the border extending between the distal border 103 and the proximal border 104, the size of which is the smallest.
- the outer border 106 is the border connecting the proximal border 104 and the distal border 103, the size of which is the largest.
- first part 101 and the second part 102 each represent 50% of the total surface of the launching plate 100. According to other embodiments, the distribution between first part 101 and second part 102 does not is not identical.
- the mobile stop 110 is the mobile stop 110
- the movable stop 110 comprises an external surface 111, an internal surface 112, a return element 113, a distal end 114, a proximal end 115 as well as an axis of rotation 116.
- the movable stop 110 is advantageously positioned on the first part 101 of the launching plate 100. More specifically, the movable stop 110 is positioned near the inner edge 105 on the first part 101.
- the movable stop 110 advantageously comprises an interior surface 112, an exterior surface 111, a distal end 114, a proximal end 115 as well as a return element 113 and an axis of rotation 116.
- the movable stop 110 advantageously has the shape of a claw. So the end proximal 115 of the movable stop 110 is the end closest to the proximal edge 104 of the launching plate 100. Conversely, the distal end 114 of the movable stop 110 is the end furthest from the proximal end 115.
- the movable stop 110 has a substantially straight portion and a curved portion.
- the proximal end 115 is in this configuration the end included in the substantially rectilinear part.
- the distal end 114 is the opposite end, that is to say the end of the curved part.
- the movable stop 110 preferably having a curved part, the inner and outer surfaces connecting each of the ends do not have an identical length. Therefore, the outer surface 111 is called the longest surface.
- the outer surface 111 is oriented facing the first part 101 of the launching plate 100.
- the inner surface 112 comprises the smallest dimension between the two ends of the movable stop 110.
- the inner surface 112 is in this embodiment facing the outer edge 106 of the launching plate 100.
- the distal end 114 of the movable stop 110 will be in contact with the target 300. And preferably it is the interior surface 112 of the distal end 114 which is in contact with a second portion of the periphery 301 of the target 300 .
- the stop is rotatably mounted on the first part 101 of the launching plate 100.
- said stop comprises, on the substantially straight part near the curved part, an axis of rotation 116 visible at figures 3a and 4a especially. This axis of rotation 116 is perpendicular to the plane in which the launching plate 100 is included.
- the proximal end 115 of the movable stop 110 is connected to a first end of the return element 113.
- the second end of the return element 113 is advantageously fixed to the launching plate 100.
- the return element 113 is fixed on the first part 101 of the launching plate 100. More specifically, this return element 113 is fixed around the junction between the inner edge 105 and the proximal edge 104 of the launching plate 100.
- the return element 113 comprises a deformable part having a high coefficient of elasticity. At rest, the return element 113 is configured to maintain the return stop in a first position.
- the return element 113 may be a spring.
- the return element 113 is configured to bring back the stop mobile 110 from the second position to the first position.
- a first position to passing from a second position of the movable stop 110 we will mean the displacement of the proximal end 115 of the movable stop 110 towards the outer edge 106 of the launching plate 100.
- the proximal end 115 of the movable stop 110 makes a movement in the direction of the outer edge 106
- the distal end 114 of the movable stop 110 makes a movement in the direction of the edge inside 105 of the launching plate 100.
- This movement is preferably articulated around an axis of rotation 116.
- all of these characteristics of the movable stop 110 allow said movable stop 110 to exert a pressure point on the periphery 301 of the target 300 in the direction of the proximal edge 104 of the launching plate 100.
- the movable stop 110 carries a first stop 117 able to cooperate with a second stop 213 carried by the finger 210.
- This participates in forming an embodiment of a target release device 300 relative to the movable stop 110 in a angular position of the arm 200 located downstream of the armed position in the direction of rotation of the arm 200.
- the stop 117 can be a fixed surface relative to the rest of the movable stop 110 or, as in the figure 5a , comprise a ring rotatably mounted on an axis integral with the body of the movable stop 110.
- the launching plate 100 also includes a guide element 120.
- the guide element 120 is positioned on the first part 101 of the launching plate 100. In each of these embodiments, and preferably the guide element 120 is located near the outer edge 106 of the launch plate 100.
- the guide element 120 is concave curvilinear and preferably an arc of a circle.
- the purpose of the guide member 120 is to guide the target 300 during its ejection by the launching arm 200.
- the guide element 120 is held on the launching plate 100 by at least two screws, including one screw at the end of the guide element 120 la closer to the distal edge 103 of the launch plate 100.
- the guide element 120 is made of a material with a low coefficient of friction.
- the guide element 120 is made of any material, but comprises a coating with a low coefficient of friction.
- the contact between the guide element 120 and the target 300 is advantageously made on a first portion of the periphery 301 of the target 300.
- the launch arm 200 The launch arm 200
- the launching arm 200 advantageously comprises an ejection part 201, a fixing part 202 and a finger 210.
- the fixing part 202 comprises an axis of rotation of the launching arm 204.
- This axis of rotation of the launching arm 204 is, in a preferred embodiment of the invention, located outside the inner edge 105 of the first part 101 of the launching plate 100.
- the connection between the launching arm 200 and the launching machine is effected by means of this axis of rotation 204.
- the axis of rotation of the launch arm 204 is carried by launch plate 100.
- the axis of rotation 204 of the launching arm is perpendicular to the plane comprising the launching plate 100.
- the launching arm 200 is included in a plane parallel to the plane comprising the launching plate 100 and preferably au- above the latter.
- the ejection portion 201 of the launch arm 200 may include a contact portion 206 configured to be applied to the target during its push.
- the ejection portion 201 is rectilinear along a longitudinal axis 205.
- the longitudinal axis 205 preferably extends along the length dimension of the launching arm 200.
- the longitudinal axis 205 is perpendicular to the axis of rotation of the launch arm 204.
- the contact portion 206 is a surface of the launch arm 200 in contact with the target 300.
- the contact between the target 300 and the launch arm 200 takes place on a fourth portion of the periphery 301 of the target 300.
- the contact portion 206 comprises a strip 203.
- the strip 203 is interposed between the target 300 and the contact portion 206. It is in particular this embodiment which is shown in the figures.
- the strip 203 is made of a material with a high coefficient of friction or comprises a coating with high coefficient of friction.
- the material or the coating of the strip 203 can thus for example be an elastomer (rubber, polyurethane).
- the arm 200 comprises a main body, for example metallic, connected to a shaft which drives it in rotation, at the axis 204.
- the finger 210 is a part exerting an additional support on the target, in particular by modifying the angle between the ejection part 201 and the target 300.
- a portion of the ejection part 201 was preferably rectilinear along a longitudinal axis 205. It thus has an angle of 0 °.
- the finger 210 in the preferred embodiment of the invention changes this angle on another portion of the arm.
- the finger 210 comprises in a preferred case a straight contact portion 211.
- This angle ⁇ can be between 5 ° and 45 ° and is preferably 12 °.
- the angle ⁇ being advantageously turned towards the axis of rotation of the launching arm 204.
- the finger 210 is advantageously made of a material with a low coefficient of friction, or has a coating with a low coefficient of friction.
- the finger 210 can be an attached element fixed to the launching arm 200 in several ways.
- part of the finger 210 can extend under the launch arm 200 and be fixed below.
- the finger 210 can be attached to the underside of the body; it then forms an additional thickness of the arm 200, directed opposite the launching plate 100.
- the figure 5e makes this option explicit, with a finger 210 in the form of a plate attached to the body of the arm, by its underside.
- the finger 210 can be fixed directly on the edge of the launching arm 200.
- the finger 210 is in contact with a fourth portion of the periphery 301 of the target 300.
- this modification of the 'angle of the part in contact with the target 300 allows, during the rotation of the launch arm 200, to exert a force on the target 300 moving said target 300 towards the guide element 120. And more precisely towards the end of the guide element closest to the distal edge 103 of the launching plate 100.
- the advantage of this embodiment is that the finger 210 is suitable for all target diameters.
- the finger 210 and the launching arm 200 are formed of a monolithic part.
- the finger 210 is produced by an elongated element, for example in the form of an elbow.
- the finger 210 includes an end of contact with the target.
- this contact end is made of a material or comprises a coating with a low coefficient of friction.
- a roller may be present at the contact end in order to make said contact.
- the end of the finger 210 opposite the contact end is mounted on the launching arm 200.
- this other end is preferably articulated around an axis of rotation of the finger.
- the axis of rotation of the finger being parallel to the axis of rotation of the arm 204.
- the elbow is oriented towards the inner edge 105 of the launching plate 100.
- the main advantage of this angled shape is that it accentuates the thrust of the finger 210 against the target 300 in the direction of the guide element 120.
- the purpose of the finger 210 is still to force the target 300 to be positioned against the guide element 120.
- the finger 210 is advantageously articulated in rotation in order to adapt to all the target diameters.
- the adaptation to said diameter can be done manually.
- a user adjusts the finger 210 so that its contact end bears on the target 300 and tightens the other end of the finger by means, for example, of a screw and a nut.
- the lower surface of the target 300 is included in a plane parallel to the plane comprising the launching plate 100. Nevertheless, the target 300, resting on the launching plate 100, is located above said launching plate. launch.
- the movable stop 110 and more particularly the distal end 114 and the guide element 120 and more particularly the inner surface of the guide element 121 are in a similar plane, and parallel to the plane of the plate 100. This plane is positioned relative to the target 300 above the lower surface, but on a lower part of the periphery 301 of the target 300.
- the contacts of the first and the second portions of the periphery 301 of the target 300 with the inner surface of the guide element 121 and the distal end 114 are made on the lower part of the periphery 301 of the target 300.
- the contact between the first and the second portion of the periphery of the target with respectively the internal surface of the guide element 121 and the distal end 114 is done on one of the first steps starting from the bottom surface of the target.
- the contacts are made on the first step starting from the lower surface of the target.
- the ejection part 201 and the finger 210 are provided for support in the same plane and parallel to the plane of the launching plate 100.
- the ejection part 201 and the finger 210 make contact respectively on the third and the fourth portion of the periphery 301 of the target 300.
- the third and the fourth portions are advantageously located on an upper part of the periphery 301 and therefore above the first and second portions of the periphery 301 of the target 300.
- the launching arm 200 and the finger 210 are included in parallel planes situated one above the other.
- the finger 210 is advantageously on the launching arm 200.
- the four support portions of the target should be located on angularly distinct areas of the target. That is to say at different locations from this advantageously circular periphery 301.
- the use of the target launching machine advantageously comprises a supplying step, a step of passing the launching arm 200 into the armed position and a position for ejecting the target 300.
- the target is supplied by a magazine (not visible in the figure) and comes to rest on the first part 101 of the launching plate 100.
- the target 300 rests on its underside.
- the target is not in contact with the launching arm 200, the finger 210, the movable stop 110 or the guide element 120. Still in this embodiment, it is however surrounded by the launching arm 200, the finger 210, the movable stop 110 and the guide element 120.
- the periphery 301 of the target is in contact with the proximal edge 104 of the launching plate 100 and the proximal end 115 of the movable stop 110.
- the launching arm 200 will then perform a first rotation.
- the direction of this rotation having the aim of bringing the ejection part 201 of the launching arm 200 closer to the distal edge 103 of the launching plate 100 by passing over the guide element 120.
- the finger 210 will come into contact with the fourth portion of the periphery of the target 300 ( figures 3b and 4b ). This contact will allow the finger 210 to exert a push on the target 300.
- This push is advantageously carried out by means of the contact part 211.
- the push exerted advantageously allows the target 300 to move towards the distal end 114 movable stop 110 ( figures 3c ), in particular so that said distal end 114 comes into contact with a first portion of the periphery 301 of the target 300.
- the force exerted jointly by the finger 210 and the stop mobile 110 will force the target 300 to move towards the guide element 120 ( 3d figures and 4c ).
- the movable stop 110 is able to exert a force thanks to its return element 113. It is also important to note that the fourth and second portions of the periphery 301 of the target 300 are not diametrically opposed. This advantageous configuration makes it possible to exert a pinch on the target.
- the finger 210 and the end of the movable stop 110 having a low coefficient of friction, this pinching allows the target to slide towards the guide element 120 and more precisely towards the interior surface of the guide element 121.
- the guide element 120 and more precisely towards the inner surface of the guide element 121 then comes into contact with the second portion of the periphery 301 of the target 300 ( figures 1 , 2 , 3rd and 4d ).
- the arm of launch 200 and more precisely the ejection part 201, and preferably the strip 203 also comes into contact with the third portion of the periphery 301 of the target 300.
- This last step corresponds to the passage of the launch arm 200 in the armed position.
- the target 300 is in simultaneous contact with the ejection part 201, the distal end 114 of the movable stop 110, the guide element 120 and the finger 200.
- the finger 200 is no longer in contact with target 300.
- the target ejection step 300 can be automatically performed following the arming step of the launch arm. It can also, in another embodiment of the invention, be triggered manually by a user.
- the launch arm 200 will perform a second rotation in a direction similar to the first. During this second rotation, the target 300 will roll along the guide element and lose its contact with the finger 210 and the movable stop 110.
- the target will advantageously pass over the second part 102 of the launching plate 100 in the direction of the distal edge 103, and therefore on the side of the external surface 111 of the movable stop ( figures 3e , 4th and 4th ).
- the finger 210 comprises, in addition to the part of contact 211 with the target 300, a second stop 213.
- the second stop 213 is formed by a portion of the edge of the finger 210 in particular situated more towards the axis of rotation of 104 as the contact part 211.
- the second stop 213 comprises a rectilinear part between a first end 214 and a second end 215.
- a rounding is formed at at least one of the ends 214, 215.
- the finger 210 is such that the portion of 111 and the second stop 213 are concurrent.
- the movable stop 110 has a first stop 117 configured to cooperate by contact with the second stop 213.
- the first stop 117 is a finger projecting from the body of the movable stop 110 towards the arm 200.
- the first stop 117 is positioned on the movable stop 110 between the axis of rotation 116 and the distal end 114.
- the first stop 117 and the second stop 213 are not in contact with each other.
- the operation of the movable stop and the finger 210 is then in accordance with the descriptions given. previously, in particular with reference to the embodiment illustrated in figures 3a to 3f .
- the first stop 117 and the second stop 213 apply to each other, due to the rotation of the arm 200 tending to bring these 2 parts closer during the pushing phase of the target 300.
- this initiation of contact between the 2 stops occurs when the target 300 reaches the distal end 122 of the guide element 120, or before or after, in particular in an angular sector of rotation of the arm 200 between -10 ° and 10 ° around the position of the arm in which the target 300 is in contact with the distal end 122 of the guide element 120.
- Such a situation is visible on figure 5c .
- the figure 5d reveals that the continued rotation of the arm 200 generates a thrust of the second stop 213 on the first stop 117 so that the contact previously established between the target 300 and the distal end 114 of the movable stop 110 is released.
- the support exerted by the movable stop 110 on the target 300 is inactivated as soon as a contact is no longer made on the target 300 by the guide element 120. In this way, we guarantees that no parasitic thrust from the movable stop 110 on the target 300, which could tend to move the latter towards the free end of the arm 200, cannot occur. The accuracy of the throw can thus be improved.
- the first stop 117 is more constrained by the movement of the arm 200 and can return to its initial position by the application of the return effect of the spring 113.
- the first stop 117 is advantageously configured so as not to interfere with other parts of the arm 200 during the rest of the rotation.
- the stop 117 may protrude beyond the body of the movable stop 110 only over a thickness such that the stop 117 does not cross the thickness of the edge of the finger 210.
- the figure 5e shows an arrangement of the arm which allows this aspect, with a finger 210 attached under the body of the arm 200 and forming, by its edge, the stop 213.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Toys (AREA)
- Portable Nailing Machines And Staplers (AREA)
Description
- La présente invention est relative notamment à une machine de lancement d'au moins une cible permettant de lancer ladite cible suivant une trajectoire précise et répétée. Un tel dispositif de lancement de cibles est connu du document
FR3016208 A1 - Une application préférée concerne l'industrie du sport de tir et en particulier au balltrap.
- Dans le domaine de l'industrie du sport de tir, les machines de lancement de cibles sont bien connues. Plusieurs modèles de lanceur de cibles existent et dans de nombreux cas, la précision de l'éjection de la cible n'est pas requise. C'est souvent notamment le cas des lanceurs de cibles présentant une mobilité en rotation. Pour ces appareils, la machine de lancement de cibles n'a besoin que d'une plaque de lancement, d'un bras de lancement et éventuellement d'un élément de guidage pour guider la cible.
- En revanche, lorsque les lanceurs de cibles sont fixes, la répétabilité des trajectoires est plus souvent exigée. Par exemple, pour des disciplines olympiques ou pour les « parcours de chasse » la répétition d'une trajectoire par un lanceur est primordiale pour permettre une compétition équitable. En effet, dans ces disciplines on cherche à évaluer les concurrents uniquement selon leur adresse au tir. Ainsi, il ne doit pas y avoir de discrimination entre les concurrents par le biais de cibles plus ou moins difficiles à atteindre ou à la trajectoire variable.
- Ces machines fixes intègrent ainsi par exemple une butée mobile et un élément de guidage.
- La fonction principale de la butée mobile est de maintenir la cible appliquée au bras de lancement grâce à un ressort de rappel. Le maintien de la cible sur le bras de lancement permet d'éviter les chocs susceptibles de briser la cible lors de l'accélération brutale du bras pour l'éjection de la cible.
- Accessoirement le roulement de la cible au contact de la butée mobile et du bras de lancement permet de rabattre la cible contre l'élément de guidage.
- Cette solution, est efficace lorsque le pourtour de la cible est parfaitement lisse, et que la plaque de lancement est parfaitement sèche. En effet, lorsque la plaque de lancement et/ou le pourtour de la cible ont une adhérence accrue, comme par exemple lors de présence d'eau sur la plaque de lancement, la cible ne se positionne pas contre l'élément de guidage. Cela modifie alors la trajectoire attendue de la cible.
- Il existe donc une demande pour améliorer la précision de l'éjection d'une cible par une machine de lancement de cibles.
- L'invention permet de résoudre tout ou partie des inconvénients des techniques actuelles.
- L'invention concerne une machine de lancement comme décrite dans la revendication 1.
- De façon avantageuse, cette machine est telle que le bras de lancement comprend un doigt doté d'une partie de contact configurée pour s'appliquer sur une quatrième portion du pourtour de la cible dans la position armée, la quatrième portion étant distincte des première, deuxième et troisième portions.
- Cette disposition permet avantageusement d'appliquer une quatrième contrainte à la cible. Cette contrainte va obliger la cible à se positionner à une position précise le long du bras de lancement. Et ceux peu important la forme du pourtour de la cible, ou de la plaque de lancement. La force exercée par le doigt de lancement permet ainsi d'éviter les effets de ventouse par exemple lorsque la plaque de lancement est mouillée.
- L'invention concerne aussi une machine dans laquelle la partie de contact est configurée pour exercer un appui sur la cible ayant une composante non nulle en direction de l'élément de guidage.
- Avantageusement et toujours dans le but de garantir à la cible une position de départ le long du bras de lancement identique, la partie de contact va pousser la cible contre l'élément de guidage.
- Ainsi, la cible se retrouve en butée contre l'élément de guidage, le bras de lancement et le doigt. La position précise permettant ce contact simultanée est unique. Ainsi, la cible est toujours positionnée au même endroit du bras de lancement.
- D'autres caractéristiques, buts et avantages de la présente invention apparaitront à la lecture de la description détaillée qui suit, et en regard des dessins annexés donnés à titre d'exemples non limitatifs et sur lesquels :
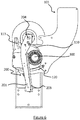
- la
figure 1 montre une réalisation préférée de l'invention et dans laquelle le doigt comprend une portion de contact rectiligne ; - la
figure 2 est une vue de dessus d'une réalisation alternative de l'invention dans laquelle le doigt à une forme de coude. - Les
figures 3a à 3e montrent les vues d'étapes, permettant de passer d'une étape d'approvisionnement en cible à une position armée de la machine de lancement de cibles. Ces vues montrent ces étapes incluant une première réalisation de l'invention. - Les
figures 4a à 4f montrent les vues d'étapes, permettant de passer d'une étape d'approvisionnement en cible à l'éjection de la cible. Ces vues montrent ces étapes incluant une réalisation alternative de l'invention. - Les
figures 5a à 5d illustrent des étapes successives d'un autre mode de réalisation de l'invention ; lafigure 5e est une vue en écorché de lafigure 5d ; - La
figure 6 montre une machine de l'art antérieur. - Avant d'entrer dans le détail de formes préférées de réalisation de l'invention en référence aux dessins notamment, d'autres caractéristiques optionnelles de l'invention, qui peuvent être mises en oeuvre de façon combinée selon toutes combinaisons ou de manière alternative, sont indiquées ci-après :
- la partie de contact est configurée pour exercer un appui sur la cible ayant une composante non nulle en direction de la butée mobile ;
- la partie de contact du doigt est située plus près de l'axe de rotation du bras de lancement que la partie d'éjection dudit bras de lancement ;
- la partie de contact est rectiligne ;
- la partie d'éjection est rectiligne suivant un axe longitudinal ;
- l'axe longitudinal et la partie de contact du doigt forment un angle α non nul.
- l'angle α est compris entre 5° et 45°, de préférence entre 8° et 16° et de préférence 12° ;
- le doigt comprend un corps allongé dont une portion distale forme au moins en partie la partie de contact ;
- Le doigt est formé d'une pièce monolithique
- le coefficient de frottement de la partie d'éjection sur la cible est supérieur à celui de la partie de contact du doigt sur la cible ;
- la matière du doigt est avantageusement un alliage d'aluminium ;
- la butée mobile est configurée pour exercer une force sur la deuxième portion du pourtour de la cible en direction de la partie d'éjection du bras de lancement ;
- au moins le contact de la machine sur au moins l'une parmi les première, deuxième, troisième et quatrième portions est ponctuel dans un plan parallèle à un plan de plaque de lancement. ;
- la fin de l'étape de passage position armée du bras de lancement déclenche automatiquement la deuxième rotation ;
- la deuxième rotation est déclenchée manuellement par un utilisateur.
- la machine comprend un dispositif de libération de la cible 300 configuré pour que la butée mobile 110 ne s'applique plus sur la cible 300 dans une position angulaire prédéfinie du bras 200 située en aval de la position armée suivant le sens de rotation du bras 200 ;
- le dispositif de libération comprend une première butée 117 portée par la butée mobile 110 et une deuxième butée 213 portée par le bras 200, la deuxième butée 213 étant configurée pour exercer une poussée sur la première butée 117 à partir de la position angulaire prédéfinie ;
- la deuxième butée 213 est située sur le doigt 210 ;
- la deuxième butée 213 est configurée pour ne plus exercer la poussée sur la première butée 117 après un secteur angulaire prédéterminé suivant la position angulaire prédéfinie ;
- la position angulaire prédéfinie est configurée pour correspondre à une position de la cible 300 au contact d'une partie située au niveau ou en amont d'une extrémité distale 122 de l'élément de guidage 120.
- Pour la bonne compréhension de l'invention, on entendra par :
- Doigt : pièce de forme quelconque servant d'appui ou d'arrêt à une autre ;
- Trajectoire d'éjection : la trajectoire suivie par une cible lors de son éjection ;
- Faible coefficient de frottement : un coefficient de frottement inférieur à celui de l'aluminium sur une cible, notamment un pigeon d'argile.
- L'invention est relative à une machine de lancement d'au moins une cible ayant une trajectoire d'éjection reproductible. Le but de l'invention est ainsi de contrôler avec précision la trajectoire d'éjection de la cible.
- La machine de lancement de cibles comprend ainsi avantageusement, une plaque de lancement 100 et un bras de lancement 200 ainsi qu'au moins une cible
300. De manière avantageuse, les cibles 300 sont comprises dans un magasin (non visible sur les figures). Ce magasin peut notamment être un barillet à plusieurs colonnes en empilement de cibles. Ainsi, la machine peut embarquer un grand nombre de cibles 300. Cela est particulièrement utile lors des compétitions ou des parcours de chasse. Dans la réalisation préférée de l'invention, le magasin approvisionne le bras de lancement 200 avec une seule cible 300 à la fois.
On donne ci-après des exemples de composants de l'invention, de façon non limitative. - La cible 300 peut être du type « pigeon d'argile » et est de préférence susceptible d'être rompue lorsque le tireur l'atteint. La cible 300 comprend un pourtour 301, une face inférieure et une face supérieure de la cible 302. Avantageusement, la cible est à base de résines. Le pourtour 301 de la cible 300 correspond à la portion de liaison entre la face inférieure et la face supérieure de la cible 302. Ainsi, le pourtour 301 de la cible correspond à la dimension en épaisseur de la cible 300. Avantageusement et de préférence, les faces supérieure 302 et inférieure sont parallèles. Dans une réalisation de l'invention la face supérieure 302 et la face inférieure de la cible sont de diamètres identiques. Dans cette réalisation le pourtour 301 est avantageusement compris dans un plan perpendiculaire au plan comprenant les faces supérieures 302 et inférieures de la cible 300.
- Dans une autre réalisation préférée de la cible 300 la face supérieure 302 à un diamètre inférieure à celui de la face inférieure. Dans cette hypothèse, le pourtour 301 peut être circulaire et de tranche rectiligne ou non. Lorsque la tranche du pourtour 301 n'est pas rectiligne elle peut avantageusement comprendre au moins une marche et de préférence une succession de marches, configurée pour réduire le diamètre du pourtour en direction de la face supérieure.
- Le support de lancement comprend une plaque de lancement 100, une butée mobile 110 et un élément de guidage 120.
- Avantageusement, la plaque de lancement 100 comprend une bordure distale 103, une bordure proximale 104, une première partie 101, une seconde partie 102, une bordure intérieure 105, et une bordure extérieure 106
- De manière préférentielle, la plaque de lancement 100 est plate. Elle comprend avantageusement une première partie 101 et une seconde partie 102. La seconde partie 102 comprend préférentiellement la bordure distale 103 de la plaque de lancement 100, ladite bordure distale 103 correspondant à l'extrémité non reliée à la machine. Lors de l'éjection d'une cible 300, la dernière partie de la machine en contact avec la cible 300 sera ladite seconde partie 102. Afin de garantir une vitesse et une trajectoire les plus parfaites possibles, la seconde partie 102 est lisse. Le but étant ici d'éviter au maximum les déviations de trajectoire dû à des obstacles ou des aspérités.
- Dans une réalisation préférée, la seconde partie 102 est en inox ou en acier avec un revêtement de zinc.
- La première partie 101 est quant à elle reliée à la machine. Elle comprend avantageusement l'extrémité proximale de la plaque de lancement 104. C'est ladite première partie 101 qui va accueillir la cible 300 au moment de l'approvisionnement par le magasin, et c'est aussi cette première partie 101 qui va avantageusement supporter la butée mobile 110 et l'élément de guidage 120. Dans d'autres réalisations de l'invention, la butée mobile 110 et l'élément de guidage 120 sont portés par le châssis de la machine et non pas par la plaque de lancement 100.
- La plaque de lancement 100 est préférentiellement en métal, ou en alliage métallique. Ainsi, la plaque peut être en acier, aluminium ou en matériaux composites.
- Avantageusement la plaque de lancement 100 à une forme sensiblement coudée. Cette forme coudée permet à la cible 300 d'avoir un support durant toute la rotation du bras de lancement 200. Néanmoins, dans des réalisations alternatives de l'invention, la plaque de lancement 100 à une forme différente. Elle peut par exemple être d'une forme de losange.
- Dans la réalisation préférée, et du fait de sa forme sensiblement coudée, les bordures s'étendant entre la bordure distale 103 et la bordure proximale 104 ne sont pas de tailles identiques.
- Avantageusement on appellera bordure intérieure 105, la bordure s'étendant entre la bordure distale 103 et la bordure proximale 104 dont la taille est la plus petite.
Inversement on appellera bordure extérieure 106 la bordure reliant la bordure proximale 104 et la bordure distale 103 dont la taille est la plus grande. - Enfin, dans la réalisation préférée, la première partie 101 et la seconde partie 102 représentent chacune 50% de la surface totale de la plaque de lancement 100. Suivant d'autres modes de réalisation la répartition entre première partie 101 et seconde partie 102 n'est pas identique.
- Avantageusement, la butée mobile 110 comprend une surface extérieure 111, une surface intérieure 112, un élément de rappel 113, une extrémité distale 114, une extrémité proximale 115 ainsi qu'un axe de rotation 116.
- La butée mobile 110 est avantageusement positionnée sur la première partie 101 de la plaque de lancement 100. Plus précisément, la butée mobile 110 est positionnée aux abords de la bordure intérieure 105 sur la première partie 101.
- La butée mobile 110 comprend avantageusement une surface intérieure 112, une surface extérieure 111, une extrémité distale 114, une extrémité proximale 115 ainsi qu'un élément de rappel 113 et un axe de rotation 116.
- La butée mobile 110 a avantageusement la forme d'une griffe. Ainsi l'extrémité proximale 115 de la butée mobile 110 est l'extrémité la plus proche de la bordure proximale 104 de la plaque de lancement 100. Inversement, l'extrémité distale 114 de la butée mobile 110 est l'extrémité la plus éloignée de l'extrémité proximale 115.
- Avantageusement, entre les deux extrémités, la butée mobile 110 dispose d'une partie sensiblement rectiligne et d'une partie courbée. L'extrémité proximale 115 est dans cette configuration l'extrémité incluse dans la partie sensiblement rectiligne. L'extrémité distale 114 est quant à elle l'extrémité opposée, c'est-à-dire l'extrémité de la partie courbée. La butée mobile 110 ayant préférentiellement une partie courbée, les surfaces intérieure et extérieure reliant chacune des extrémités n'ont pas une longueur identique. De ce fait, on appelle surface extérieure 111, la surface la plus longue. Avantageusement la surface extérieure 111 est orientée en vis-à-vis de la première partie 101 de la plaque de lancement 100. Inversement, la surface intérieure 112 comprend la dimension la plus faible entre les deux extrémités de la butée mobile 110. La surface intérieure 112 est dans cette réalisation tournée vers la bordure extérieure 106 de la plaque de lancement 100.
- L'extrémité distale 114 de la butée mobile 110 va être en contact avec la cible 300. Et de préférence c'est la surface intérieure 112 de l'extrémité distale 114 qui est en contact avec une deuxième portion du pourtour 301 de la cible 300.
- La butée est montée en rotation sur la première partie 101 de la plaque de lancement 100. Pour ce faire, ladite butée comprend, sur la partie sensiblement rectiligne aux abords de la partie courbée, un axe de rotation 116 visible en
figures 3a et4a notamment. Cet axe de rotation 116 est perpendiculaire au plan dans lequel est comprise la plaque de lancement 100. - Avantageusement, l'extrémité proximale 115 de la butée mobile 110 est raccordée à une première extrémité de l'élément de rappel 113. La seconde extrémité de l'élément de rappel 113 étant avantageusement fixée à la plaque de lancement 100.
- De manière préférentielle, la fixation de l'élément de rappel 113 s'effectue sur la première partie 101 de la plaque de lancement 100. Plus précisément, cet élément de rappel 113 est fixé aux abords de la jonction entre la bordure intérieure 105 et la bordure proximale 104 de la plaque de lancement 100. L'élément de rappel 113 comprend une partie déformable ayant un coefficient d'élasticité important. Au repos, l'élément de rappel 113 est configuré pour maintenir la butée de rappel dans une première position. Par exemple, l'élément de rappel 113 peut être un ressort.
- En action, lorsque la butée mobile 110 passe d'une première position à une deuxième position, l'élément de rappel 113 est configuré pour ramener la butée mobile
110 de la deuxième position à la première position. De manière avantageuse et non limitative, on entendra par passage d'une première position au passage d'une deuxième position de la butée mobile 110, le déplacement de l'extrémité proximale 115 de la butée mobile 110 en direction de la bordure extérieure 106 de la plaque de lancement 100. Dans cette configuration, lorsque l'extrémité proximale 115 de la butée mobile 110 effectue un mouvement en direction de la bordure extérieure 106, l'extrémité distale 114 de la butée mobile 110 effectue un mouvement en direction de la bordure intérieure 105 de la plaque de lancement 100. Ce mouvement étant de préférence articulé autour d'un axe de rotation 116. - Avantageusement, toutes ces caractéristiques de la butée mobile 110 permettent à ladite butée mobile 110 d'exercer un point de pression sur le pourtour 301 de la cible 300 dans la direction de la bordure proximale 104 de la plaque de lancement 100.
- Suivant une option visible aux
figures 5a à 5e , la butée mobile 110 porte une première butée 117 apte à coopérer avec une deuxième butée 213 portée par le doigt 210. Cela participe à former un mode de réalisation d'un dispositif de libération de la cible 300 relativement à la butée mobile 110 dans une position angulaire du bras 200 située en aval de la position armée suivant le sens de rotation du bras 200. La butée 117 peut être une surface fixe relativement au reste de la butée mobile 110 ou encore, comme dans lafigure 5a , comprendre une bague montée à rotation sur un axe solidaire du corps de la butée mobile 110. - Avantageusement la plaque de lancement 100 comprend aussi un élément de guidage 120. L'élément de guidage 120 est positionné sur la première partie 101 de la plaque de lancement 100. Dans chacune de ces réalisations, et de manière préférentielle l'élément de guidage 120 se trouve à proximité de la bordure extérieure 106 de la plaque de lancement 100.
- Avantageusement, l'élément de guidage 120 est curviligne concave et de préférence un arc de cercle. Le but de l'élément de guidage 120 est de guider la cible
300 lors de son éjection par le bras de lancement 200. De manière préférentielle l'élément de guidage 120 est maintenue à la plaque de lancement 100 par au moins deux vis, dont une vis à l'extrémité de l'élément de guidage 120 la plus proche de la bordure distale 103 de la plaque de lancement 100. De manière préférentielle, l'élément de guidage 120 est fait d'un matériau à faible coefficient de frottement. - Dans une autre réalisation de l'invention l'élément de guidage 120 est fait d'un matériau quelconque, mais comprend un revêtement à faible coefficient de frottement.
Le contact entre l'élément de guidage 120 et la cible 300 se fait avantageusement sur une première portion du pourtour 301 de la cible 300. - Le bras de lancement 200 comprend avantageusement une partie d'éjection 201, une partie de fixation 202 et un doigt 210.
Avantageusement la partie de fixation 202 comprend un axe de rotation du bras de lancement 204. Cet axe de rotation du bras de lancement 204 est, dans une réalisation préférée de l'invention, situé à l'extérieur de la bordure intérieure 105 de la première partie 101 de la plaque de lancement 100. La liaison entre le bras de lancement 200 et la machine de lancement s'effectue par le biais de cet axe de rotation 204. Dans une autre réalisation de l'invention, l'axe de rotation du bras de lancement 204 est porté par la plaque de lancement 100. - Avantageusement l'axe de rotation 204 du bras de lancement est perpendiculaire au plan comprenant la plaque de lancement 100. De manière préférentielle, le bras de lancement 200 est compris dans un plan parallèle au plan comprenant la plaque de lancement 100 et de préférence au-dessus de ce dernier.
- La partie d'éjection 201 du bras de lancement 200 peut comprendre une portion de contact 206 configurée pour s'appliquer sur la cible lors de sa poussée. Avantageusement, la partie d'éjection 201 est rectiligne suivant un axe longitudinal 205. L'axe longitudinal 205 s'étend de préférence selon la dimension en longueur du bras de lancement 200. Avantageusement, l'axe longitudinal 205 est perpendiculaire avec l'axe de rotation du bras de lancement 204.
- Par exemple, la portion de contact 206 est une surface du bras de lancement 200 en contact avec la cible 300. De préférence le contact entre la cible 300 et le bras de lancement 200 s'effectue sur une quatrième portion du pourtour 301 de la cible 300.
- Dans une réalisation préférée, la portion de contact 206 comprend une réglette 203. Dans cette réalisation, la réglette 203 s'interpose entre la cible 300 et la portion de contact 206. C'est notamment cette réalisation qui est représentée dans les figures. De manière avantageuse et non exhaustive la réglette 203 est constituée d'un matériau à fort coefficient de frottement ou comprend un revêtement à fort coefficient de frottement. Le matériau ou le revêtement de la réglette 203 peut ainsi par exemple être un élastomère (caoutchouc, polyuréthane).
- Suivant un mode de réalisation, le bras 200 comprend un corps principal, par exemple métallique, relié à un arbre qui le motorise en rotation, au niveau de l'axe 204.
- Dans la réalisation préférée de l'invention, le doigt 210 est une pièce exerçant un appui supplémentaire sur la cible, notamment en modifiant l'angle entre la partie d'éjection 201 et la cible 300. Nous avons dit précédemment qu'une portion de la partie d'éjection 201 était de préférence rectiligne suivant avec un axe longitudinal 205. Elle possède ainsi un angle de 0°. Le doigt 210 dans la réalisation préférée de l'invention vient modifier cet angle sur une autre portion du bras. Le doigt 210 comprend dans un cas préféré une partie de contact 211 rectiligne. Ainsi la partie d'éjection 201 n'est plus suivant une seule ligne, mais comprend un angle appelé α. Cet angle α peut être compris entre 5° et 45° et est de préférence de 12°. L'angle α étant avantageusement tourné vers l'axe de rotation du bras de lancement 204.
- Le doigt 210 est avantageusement réalisé dans un matériau à faible coefficient de frottement, ou possède un revêtement à faible coefficient de frottement. Dans cette réalisation, le doigt 210 peut être un élément rapporté fixé au bras de lancement 200 de plusieurs manières. Par exemple une partie du doigt 210 peut se prolonger sous le bras de lancement 200 et se fixer par-dessous. Par exemple, si le bras 200 comporte un corps principal, le doigt 210 peut être rapporté sur la face inférieure du corps ; il forme alors une surépaisseur du bras 200, dirigée en regard de la plaque de lancement 100. La
figure 5e rend explicite cette option, avec un doigt 210 sous forme d'une plaque rapportée sur le corps du bras, par sa face inférieure. - Dans une autre hypothèse le doigt 210 peut se fixer directement sur la tranche du bras de lancement 200. En tout état de cause, le doigt 210 est en contact avec une quatrième portion du pourtour 301 de la cible 300. Avantageusement, cette modification de l'angle de la partie en contact avec la cible 300 permet, lors de la rotation du bras de lancement 200, d'exercer une force sur la cible 300 déplaçant ladite cible 300 vers l'élément de guidage 120. Et plus précisément vers l'extrémité de l'élément de guidage la plus proche de la bordure distale 103 de la plaque de lancement 100.
- L'avantage de cette réalisation est que le doigt 210 est adapté à tous les diamètres de cibles.
- Enfin, dans une autre réalisation, le doigt 210 et le bras de lancement 200 sont formés d'une pièce monolithique.
- Dans une troisième réalisation de l'invention, le doigt 210 est réalisé par un élément allongé, par exemple en forme de coude. Dans cette réalisation le doigt 210 comprend une extrémité de contact avec la cible. Avantageusement cette extrémité de contact est réalisée dans un matériau ou comprend un revêtement à faible coefficient de frottement. De plus, une roulette peut être présente à l'extrémité de contact afin de réaliser ledit contact. Dans cette réalisation l'extrémité du doigt 210 opposée à l'extrémité de contact est montée sur bras de lancement 200. De plus, cette autre extrémité s'articule de préférence autour d'un axe de rotation du doigt. L'axe de rotation du doigt étant parallèle à l'axe de rotation du bras 204. Dans cette réalisation le coude est orienté vers la bordure intérieure 105 de la plaque de lancement 100. Cette forme coudée a pour principale avantage d'accentuer la poussée du doigt 210 contre la cible 300 dans la direction de l'élément de guidage 120.
- Le but du doigt 210 étant toujours de forcer la cible 300 à se positionner contre l'élément de guidage 120. Dans cette réalisation, le doigt 210 est avantageusement articulé en rotation afin de s'adapter à tous les diamètres de cibles. L'adaptation audit diamètre peut se faire manuellement. Dans ce cas, un utilisateur règle le doigt 210 pour que son extrémité de contact prenne appui sur la cible 300 et serre l'autre extrémité du doigt par le biais par exemple d'une vis et d'un écrou.
- Dans la suite de la description, on donne d'autres variantes de réalisation du doigt 210, notamment en référence aux
figures 5a à 5e . - Selon la réalisation préférée, la surface inférieure de la cible 300 est comprise dans un plan parallèle au plan comprenant la plaque de lancement 100. Néanmoins, la cible 300, reposant sur la plaque de lancement 100, se trouve au-dessus de ladite plaque de lancement.
- Avantageusement mais non limitativement, la butée mobile 110 et plus particulièrement l'extrémité distale 114 et l'élément de guidage 120 et plus particulièrement la surface intérieure de l'élément de guidage 121 sont dans un plan similaire, et parallèle au plan de la plaque de lancement 100. Ce plan est positionné relativement à la cible 300 au-dessus de la surface inférieure, mais sur une partie basse du pourtour 301 de la cible 300. Ainsi, les contacts des première et la deuxième portions du pourtour 301 de la cible 300 avec la surface intérieure de l'élément de guidage 121 et l'extrémité distale 114 se font sur la partie basse du pourtour 301 de la cible 300.
- Dans l'hypothèse où le pourtour 301 de la cible 300 comprend au moins une marche, alors le contact entre la première et la deuxième portion du pourtour de la cible avec respectivement la surface intérieure de l'élément de guidage 121 et l'extrémité distale 114 se fait sur l'une des premières marches en partant de la surface inférieure de la cible. De préférence les contacts se font sur la première marche en partant de la surface inférieure de la cible.
- Dans la réalisation préférée de l'invention, la partie d'éjection 201 et le doigt 210 sont prévus pour un appui dans un même plan et parallèle au plan de la plaque de lancement 100. Dans cette réalisation, la partie d'éjection 201 et le doigt 210 prennent contact respectivement sur la troisième et la quatrième portion du pourtour 301 de la cible 300. La troisième et la quatrième portions sont avantageusement situées sur une partie haute du pourtour 301 et donc au-dessus des première et deuxième portions du pourtour 301 de la cible 300. Dans une réalisation alternative de l'invention, le bras de lancement 200 et le doigt 210 sont compris dans des plans parallèles situés l'un au- dessus de l'autre. Dans cette réalisation, le doigt 210 est avantageusement sur le bras de lancement 200.
- D'autres réalisations sont bien entendu possibles pour le fonctionnement de l'invention comme par exemple en attribuant des plans indépendants et parallèles à la partie d'éjection, au doigt 210, la surface intérieure de l'élément de guidage 121 et à l'extrémité distale 114. Néanmoins, dans toutes ces réalisations, le bras de lancement 200 et le doigt 210 est dans un ou des plans situés au-dessus du ou des plans de l'extrémité distale 114 et de la surface intérieure de l'élément de guidage 121. Le but de ce décalage est que lors de la rotation du bras de lancement 200, ce dernier peut passer au-dessus de l'élément de guidage 120 et de la butée mobile 110.
- D'une manière générale, il convient que les quatre portions d'appui de la cible soient situées sur des zones de la cible angulairement distinctes. C'est-à-dire à des endroits différents de ce pourtour 301 avantageusement circulaire. L'utilisation de la machine de lancement de cibles comprend avantageusement une étape d'approvisionnement, une étape de passage en position armée du bras de lancement 200 et une position d'éjection de la cible 300.
- Au début de l'étape d'approvisionnement (
figures 3a et4a ) la cible est fournie par un magasin (non visible sur la figure) et vient reposer sur la première partie 101 de la plaque de lancement 100. Avantageusement, la cible 300 repose sur sa face inférieure. De manière préférentielle, lors de cette étape, la cible n'est pas au contact du bras de lancement 200, du doigt 210, de la butée mobile 110 ou de l'élément de guidage 120. Toujours dans cette réalisation, elle est cependant entourée par le bras de lancement 200, le doigt 210, la butée mobile 110 et l'élément de guidage 120. - Dans une autre réalisation de l'invention, le pourtour 301 de la cible est en contact avec la bordure proximale 104 de la plaque de lancement 100 et l'extrémité proximale 115 de la butée mobile 110.
- Le bras de lancement 200 va ensuite effectuer une première rotation. Le sens de cette rotation ayant pour but de rapprocher la partie d'éjection 201 du bras de lancement 200 de la bordure distale 103 de la plaque de lancement 100 en passant au-dessus de l'élément de guidage 120.
- Lors de cette première rotation le doigt 210 va entrer en contact avec la quatrième portion du pourtour de la cible 300 (
figures 3b et4b ). Ce contact va permettre au doigt 210 d'exercer une poussée sur la cible 300. Cette poussée est avantageusement réalisée par le biais de la partie de contact 211. La poussée exercée permet avantageusement à la cible 300 de se déplacer vers l'extrémité distale 114 de la butée mobile 110 (figures 3c ), afin notamment que ladite extrémité distale 114 entre en contact avec une première portion du pourtour 301 de la cible 300. Ensuite, lors de la poursuite de la rotation du bras de lancement 200, la force exercée conjointement par le doigt 210 et la butée mobile 110 va obliger la cible 300 à se déplacer vers l'élément de guidage 120 (figures 3d et4c ). La butée mobile 110 est apte à exercer une force grâce à son élément de rappel 113. Il est aussi important de noter que les quatrième et deuxième portions du pourtour 301 de la cible 300 ne sont pas diamétralement opposées. Cette configuration avantageuse permet d'exercer un pincement sur la cible. Le doigt 210 et l'extrémité de la butée mobile 110 ayant un faible coefficient de frottement, ce pincement permet le glissement de la cible vers l'élément de guidage 120 et plus précisément vers la surface intérieure de l'élément de guidage 121. - L'élément de guidage 120 et plus précisément vers la surface intérieure de l'élément de guidage 121 entre ensuite en contact avec la deuxième portion du pourtour 301 de la cible 300 (
figures 1 ,2 ,3e et4d ). A ce moment, le bras de lancement 200 et plus précisément la partie d'éjection 201, et de préférence la réglette 203 entre aussi en contact avec la troisième portion du pourtour 301 de la cible 300. Cette dernière étape correspond au passage en position armée du bras de lancement 200. Avantageusement, dans la position armée, la cible 300 est en contact simultanément avec la partie d'éjection 201, l'extrémité distale 114 de la butée mobile 110, l'élément de guidage 120 et le doigt 200. Dans une réalisation alternative, le doigt 200 n'est plus en contact avec la cible 300. - L'étape d'éjection de la cible 300 peut être automatiquement réalisée à la suite de l'étape d'armement du bras de lancement. Elle peut aussi, dans une autre réalisation de l'invention, être déclenchée manuellement par un utilisateur. Lors de l'étape d'éjection, le bras de lancement 200 va réaliser une deuxième rotation dans un sens similaire à la première. Lors de cette deuxième rotation, la cible 300 va rouler le long de l'élément de guidage et perdre son contact avec le doigt 210 et la butée mobile110. Ainsi la cible va passer avantageusement sur la seconde partie 102 de la plaque de lancement 100 en direction de la bordure distale 103, et donc du côté de la surface extérieure 111 de la butée mobile (
figures 3e ,4e et 4f ). - Les
figures 5a à 5e présentent un mode de réalisation supplémentaire basée sur une variante du mode de réalisation desfigures 3a à 3f . Suivant cet autre exemple, le doigt 210 comporte outre la partie de contact 211 avec la cible 300, une deuxième butée 213. De préférence, la deuxième butée 213 est formée par une portion de la tranche du doigt 210 notamment située plus en direction de l'axe de rotation de 104 que la partie de contact 211. En se référant à lafigure 5a , la deuxième butée 213 comporte une partie rectiligne entre une première extrémité 214 et une deuxième extrémité 215. De préférence, un arrondi est formé au niveau d'au moins une des extrémités 214, 215. Dans le cas de la figure précitée, le doigt 210 est tel que la portion de 111 et la deuxième butée 213 sont concourantes. - La butée mobile 110 comporte une première butée 117 configurée pour coopérer par contact avec la deuxième butée 213. Dans le cas illustré, la première butée 117 est un doigt faisant saillie sur le corps de la butée mobile 110 en direction du bras 200. De préférence, la première butée 117 est positionnée sur la butée mobile 110 entre l'axe de rotation 116 et l'extrémité distale 114.
- Dans le cas représenté aux
figures 5a et 5b , la première butée 117 et la deuxième butée 213 ne sont pas en contact l'une avec l'autre. Le fonctionnement de la butée mobile et du doigt 210 est alors conforme aux descriptions données précédemment, notamment en référence au mode de réalisation illustrée auxfigures 3a à 3f . À lafigure 5c , la première butée 117 et la deuxième butée 213 s'appliquent l'une sur l'autre, du fait de la rotation du bras 200 tendant à rapprocher ces 2 parties lors de la phase de poussée de la cible 300. De préférence, cette amorce de contact entre les 2 butées se produit au moment où la cible 300 atteint l'extrémité distale 122 de l'élément de guidage 120, ou avant, ou après, notamment dans un secteur angulaire de rotation du bras 200 compris entre -10° et 10° autour de la position du bras dans laquelle la cible 300 est en contact avec l'extrémité distale 122 de l'élément de guidage 120. Une telle situation est visible à lafigure 5c . - La
figure 5d révèle que la poursuite de la rotation du bras 200 engendre une poussée de la deuxième butée 213 sur la première butée 117 de telle sorte que le contact précédemment établi entre la cible 300 et l'extrémité distale 114 de la butée mobile 110 soit libéré. En effet, il est avantageux que l'appui exercé par la butée mobile 110 sur la cible 300 soit inactivé dès lors qu'un contact n'est plus réalisé sur la cible 300 par l'élément de guidage 120. De cette façon, on garantit qu'aucune poussée parasite de la butée mobile 110 sur la cible 300, qui pourrait avoir tendance à déplacer cette dernière en direction de l'extrémité libre du bras 200, ne peut se produire. La précision du lancer peut ainsi être améliorée. - Ultérieurement, avec la poursuite de la rotation du bras 200, avec le déplacement relatif de la première butée 117 le long de la deuxième butée 213, la première butée 117 parvient progressivement à la deuxième extrémité 215 de la deuxième butée 213. En dépassant l'extrémité 215, la butée 117 se retrouve plus contrainte par le déplacement du bras 200 et peut reprendre sa position initiale par l'application de l'effet de rappel du ressort 113. On notera que la première butée 117 est avantageusement configurée pour ne pas interférer avec d'autres parties du bras 200 au cours de la suite de la rotation. À cet effet, par exemple, la butée 117 peut ne faire saillie au-delà du corps de la butée mobile 110 que sur une épaisseur telle que la butée 117 ne franchit pas l'épaisseur de la tranche du doigt 210. La
figure 5e montre une disposition du bras qui permet cet aspect, avec un doigt 210 rapporté sous le corps du bras 200 et formant, par sa tranche, la butée 213. - L'invention n'est pas limitée aux modes de réalisation précédemment décrits mais s'étend à tous modes de réalisation selon les revendications annexées.
-
- 100.
- Plaque de lancement
- 101.
- Première partie
- 102.
- Seconde partie
- 103.
- bordure distale
- 104.
- Bordure proximale
- 105.
- Bordure intérieure
- 106.
- Bordure extérieure
- 110.
- Butée mobile
- 111.
- Surface extérieure
- 112.
- Surface intérieure
- 113.
- Elément de rappel
- 114.
- Extrémité distale
- 115.
- Extrémité proximale
- 116.
- Axe de rotation
- 117.
- Première butée
- 120.
- Elément de guidage
- 121.
- Surface intérieur de l'élément de guidage
- 122.
- Extrémité distale
- 200.
- Bras de lancement
- 201.
- Partie d'éjection
- 202.
- Partie de fixation
- 203.
- Réglette
- 204.
- Axe de rotation du bras de lancement
- 205.
- Axe longitudinal
- 206.
- Portion de contact
- 210.
- Doigt
- 211.
- Partie de contact
- 213.
- Deuxième butée
- 214.
- Première extrémité
- 215.
- Deuxième extrémité
- 300.
- Cible
- 301.
- Pourtour de la cible
- 302.
- Face supérieure de la cible
Claims (15)
- Machine de lancement d'au moins une cible (300) comprenant :• une plaque de lancement (100) configurée pour supporter une face inférieure de la cible (300) ;• un bras de lancement (200) mobile en rotation autour d'un axe de rotation (204) au moins entre une position d'approvisionnement, une position armée et une position d'éjection ;• un élément de guidage (120) configuré pour s'appliquer sur une première portion d'un pourtour (301) de la cible (300) dans la position armée;• une butée mobile (110) configurée pour exercer une force sur une deuxième portion du pourtour (301) de la cible (300) dans la position armée;machine dans laquelle le bras de lancement (200) comprend une partie d'éjection (201) configurée pour appliquer un effort d'éjection sur une troisième portion de la cible (300) dans la position armée, les première, deuxième et troisième portions étant distinctes,
caractérisée en ce que le bras de lancement (200) comprend un doigt (210) doté d'une partie de contact (211) étant rectiligne et configurée pour s'appliquer sur une quatrième portion du pourtour (301) de la cible (300) dans la position armée, la quatrième portion étant distincte des première, deuxième et troisième portions, la partie d'éjection (201) étant rectiligne suivant un axe longitudinal (205), l'axe longitudinal (205) et la partie de contact (211) du doigt (210) formant un angle α non nul. - Machine selon la revendication précédente dans laquelle la partie de contact (211) est configurée pour exercer un appui sur la cible (300) ayant une composante non nulle en direction de l'élément de guidage (120).
- Machine selon la revendication précédente dans laquelle la partie de contact (211) est configurée pour exercer un appui sur la cible (300) ayant une composante non nulle en direction de la butée mobile (110).
- Machine selon l'une des revendications précédentes, dans laquelle la partie de contact (211) du doigt (210) est située plus près de l'axe de rotation du bras de lancement (204) que la partie d'éjection (201) dudit bras de lancement (200).
- Machine selon l'une quelconque des revendications précédentes dans laquelle l'angle α est compris entre 5° et 45°, de préférence entre 8°et 16° et de préférence 12°.
- Machine selon l'une quelconque des revendications 1 à 4 dans laquelle le doigt (210) comprend un corps allongé dont une portion distale forme au moins en partie la partie de contact (211).
- Machine selon l'une quelconque des revendications précédentes dans laquelle le coefficient de frottement de la partie d'éjection (201) sur la cible (300) est supérieur à celui de la partie de contact (211) du doigt (210) sur la cible (300).
- Machine selon la revendication précédente dans laquelle la matière du doigt (210) est un alliage d'aluminium.
- Machine selon l'une quelconque des revendications précédentes dans laquelle la butée mobile (110) est configurée pour exercer une force sur la deuxième portion du pourtour (301) de la cible (300) en direction de la partie d'éjection (201) du bras de lancement (200).
- Machine selon l'une quelconque des revendications précédentes, dans laquelle au moins le contact de la machine sur au moins l'une parmi les première, deuxième, troisième et quatrième portions est ponctuel dans un plan parallèle à un plan de plaque de lancement (100).
- Machine selon l'une quelconque des revendications précédentes, comprenant un dispositif de libération de la cible (300) configuré pour que la butée mobile (110) ne s'applique plus sur la cible (300) dans une position angulaire prédéfinie du bras (200) située en aval de la position armée suivant le sens de rotation du bras (200).
- Machine selon la revendication précédente, dans laquelle le dispositif de libération comprend une première butée (117) portée par la butée mobile (110) et une deuxième butée (213) portée par le bras (200), la deuxième butée (213) étant configurée pour exercer une poussée sur la première butée (117) à partir de la position angulaire prédéfinie.
- Machine selon la revendication précédente, dans laquelle la deuxième butée (213) est située sur le doigt (210).
- Machine selon l'une des deux revendications précédentes, dans laquelle la deuxième butée (213) est configurée pour ne plus exercer la poussée sur la première butée (117) après un secteur angulaire prédéterminé suivant la position angulaire prédéfinie.
- Machine selon l'une des quatre revendications précédentes, dans laquelle la position angulaire prédéfinie est configurée pour correspondre à une position de la cible (300) au contact d'une partie située au niveau ou en amont d'une extrémité distale (122) de l'élément de guidage (120).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1652090A FR3048772B1 (fr) | 2016-03-14 | 2016-03-14 | Machine de lancement d'au moins une cible |
| PCT/EP2017/056008 WO2017157946A1 (fr) | 2016-03-14 | 2017-03-14 | Machine de lancement d'au moins une cible |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3430347A1 EP3430347A1 (fr) | 2019-01-23 |
| EP3430347B1 true EP3430347B1 (fr) | 2020-06-17 |
Family
ID=56411714
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17709723.5A Active EP3430347B1 (fr) | 2016-03-14 | 2017-03-14 | Machine de lancement d'au moins une cible |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10690458B2 (fr) |
| EP (1) | EP3430347B1 (fr) |
| FR (1) | FR3048772B1 (fr) |
| WO (1) | WO2017157946A1 (fr) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3100879B1 (fr) * | 2019-09-17 | 2022-04-15 | Laporte Holding | Dispositif de lancement de cibles |
| FR3120433B1 (fr) * | 2021-03-03 | 2023-01-27 | Laporte Holding | Bras de lancement |
| US11441879B1 (en) * | 2021-03-11 | 2022-09-13 | Bushnell Inc. | Trap machine with a spring manipulation mechanism |
| US20230213318A1 (en) * | 2021-12-30 | 2023-07-06 | Aob Products Company | Handheld shooting target thrower |
| US11885599B2 (en) * | 2022-01-11 | 2024-01-30 | Aob Products Company | Shooting target thrower |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2996058A (en) * | 1958-02-03 | 1961-08-15 | Remington Arms Co Inc | Magazine target trap |
| FR2296561A1 (fr) | 1974-12-30 | 1976-07-30 | Monin Andre | Bicyclette |
| US4146008A (en) | 1977-07-21 | 1979-03-27 | Remington Arms Company, Inc. | Target positioner for skeet trap |
| US5050575A (en) | 1990-02-06 | 1991-09-24 | Killion Darryl B | Disk launcher |
| FR2696538B1 (fr) | 1992-10-07 | 1994-12-16 | Laporte Ball Trap Sarl | Perfectionnement lié aux appareils pour le lancement de plateaux ou cibles mobiles. |
| FR2787181B1 (fr) * | 1998-12-15 | 2001-05-25 | Laporte Ball Trap | Appareil pour le lancement de cibles du type plateau d'argile |
| US6276350B1 (en) | 2000-09-15 | 2001-08-21 | Laporte, Usa, Inc. | Variable angle target launcher |
| FR2993047B1 (fr) | 2012-07-03 | 2015-04-10 | Laporte Holding | Dispositif de lancement de cibles pour le tir sportif a depart instantane de la cible |
| FR3016208B1 (fr) * | 2014-01-08 | 2016-02-05 | Laporte Holding | Dispositif de lancement de cibles pour le tir sportif a depart instantane avec moyens de blocage actifs sur l'arbre de rotation du bras de lancement |
-
2016
- 2016-03-14 FR FR1652090A patent/FR3048772B1/fr not_active Expired - Fee Related
-
2017
- 2017-03-14 WO PCT/EP2017/056008 patent/WO2017157946A1/fr not_active Ceased
- 2017-03-14 US US16/085,388 patent/US10690458B2/en active Active
- 2017-03-14 EP EP17709723.5A patent/EP3430347B1/fr active Active
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3048772A1 (fr) | 2017-09-15 |
| US20190154412A1 (en) | 2019-05-23 |
| WO2017157946A1 (fr) | 2017-09-21 |
| FR3048772B1 (fr) | 2018-09-28 |
| EP3430347A1 (fr) | 2019-01-23 |
| US10690458B2 (en) | 2020-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3430347B1 (fr) | Machine de lancement d'au moins une cible | |
| EP2567178B1 (fr) | Appareil pour le lancement de cibles | |
| EP2567181B1 (fr) | Appareil pour le lancement de cibles | |
| WO2012080489A1 (fr) | Machine de lancement de cibles | |
| EP2567182B1 (fr) | Machines pour le lancement de cibles a surfaces de contact optimisees | |
| EP2336711B1 (fr) | Dispositif de lancement pour projectile d'artillerie sous calibré | |
| FR2946423A1 (fr) | Dispositif d'ouverture et de verrouillage d'un empennage de munition | |
| FR2906756A1 (fr) | Instrument d'ecriture a pointe fixe avec un manchon de protection retractable | |
| EP1475601B1 (fr) | Projectile sous-calibré, barreau et sabot constituant un tel projectile | |
| EP3319667A1 (fr) | Seringue et son procédé d'assemblage | |
| WO2011138337A1 (fr) | Machine pour le lancement de cibles | |
| WO2020007725A1 (fr) | Machine de lancement de cibles avec barillet rotatif | |
| EP2567179B1 (fr) | Dispositif de distribution de cibles | |
| EP3489617B1 (fr) | Projectile | |
| EP0350370B1 (fr) | Appareil automatique de pose d'inserts notamment du type douille | |
| EP1384970B1 (fr) | Projectile sous calibré à appuis multiples | |
| EP4105591B1 (fr) | Dispositif de mise à poste d'un projectile | |
| FR3020826A1 (fr) | Dispositif d'obturation de l'acces d'une cle a un barillet d'une serrure, et serrure comprenant un tel dispositif | |
| FR2666144A1 (fr) | Projectile sous-calibre avec cage de propulsion. | |
| EP4575674A1 (fr) | Mouvement horloger muni d'un mécanisme d'entrainement d'un indicateur sautant | |
| CH721440A2 (fr) | Mouvement horloger muni d'un mécanisme d'entrainement d'un indicateur sautant | |
| FR2472166A1 (fr) | Dispositif pour un separateur equipant une arme a feu | |
| EP3569799A1 (fr) | Ensemble de commande de verrouillage à clé | |
| WO2018146243A1 (fr) | Appareil de lancement de cibles comprenant un organe de repositionnement des cibles avant lancement | |
| FR3038042A1 (fr) | Dispositif de controle de trajectoire pour un projectile et projectile equipe d'un tel dispositif |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20180912 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20191202 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602017018302 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1281829 Country of ref document: AT Kind code of ref document: T Effective date: 20200715 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200918 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200917 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20200617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200917 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1281829 Country of ref document: AT Kind code of ref document: T Effective date: 20200617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201019 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201017 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602017018302 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| 26N | No opposition filed |
Effective date: 20210318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602017018302 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210314 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211001 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20170314 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20240318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250324 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200617 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20260326 Year of fee payment: 10 |