EP3713841B1 - Equipement de coque - Google Patents
Equipement de coque Download PDFInfo
- Publication number
- EP3713841B1 EP3713841B1 EP18800976.5A EP18800976A EP3713841B1 EP 3713841 B1 EP3713841 B1 EP 3713841B1 EP 18800976 A EP18800976 A EP 18800976A EP 3713841 B1 EP3713841 B1 EP 3713841B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- hull
- magnets
- attachment surface
- tile
- hull device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G13/00—Other offensive or defensive arrangements on vessels; Vessels characterised thereby
- B63G13/02—Camouflage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/04—Superstructure
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/02—Permanent magnets [PM]
- H01F7/0205—Magnetic circuits with PM in general
- H01F7/0221—Mounting means for PM, supporting, coating, encapsulating PM
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B2231/00—Material used for some parts or elements, or for particular purposes
- B63B2231/30—Magnetic materials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G13/00—Other offensive or defensive arrangements on vessels; Vessels characterised thereby
- B63G13/02—Camouflage
- B63G2013/027—Camouflage using stealth design, i.e. superstructures, hulls, or other vessel's components shaped or constructed for minimizing reflection of radar or sonar beams, or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/28—Arrangement of offensive or defensive equipment
- B63G8/34—Camouflage
Definitions
- the present invention relates to an underwater vessel provided with hull equipment adapted to be reversibly fixed to an external surface of a structure made of ferromagnetic material of the marine or underwater vessel or system, the equipment comprising at least one fixing surface suitable for allowing the equipment to be fixed to the structure.
- a reversible fastener is therefore desirable, to facilitate the removal of the covering, and to be able to possibly reuse it once the operation requiring removal is complete.
- Reversible attachment systems also find use for hull equipment other than coatings, such as sensors and cameras. They can also be mobile devices such as robots, devices, or hull inspection vehicles that utilize the reversible aspect of the attachment during their movement.
- An aim of the invention is to provide hull equipment, which can be fixed in a reversible manner, the installation of which is simple to implement and inexpensive in terms of specific material and labor.
- the invention relates to a marine or underwater building or system according to claim 1.
- Attaching such equipment to a ferromagnetic structure is simple and does not require any special equipment or qualified personnel.
- the equipment is held against the structure by permanent magnets during use of the marine or submarine vessel, and can be easily removed during maintenance or replacement operations.
- Such a system is also compact, simple and robust, as well as harmless to the support. It also does not require any power supply, and is not very sensitive to aging.
- the marine or underwater building or system according to the invention is according to any one of claims 2 to 7.
- a submarine building 10 is shown on the Figure 1
- the underwater building 10 comprises a hull 12 made of ferromagnetic material, defining an external surface 14 and sealingly separating an internal space from an exterior of the underwater building 10, even under the effect of external pressures.
- a plurality of hull fittings are attached to the outer surface 14 of the hull 12.
- the hull fittings are attached to the outer surface 14 in a reversible manner, i.e., they can be removed from the outer surface 14 without damaging them or the hull 12.
- the hull fittings are tiles 16 forming a covering of a portion of the hull 12 to modify at least one property of the external surface 14.
- the tiles 16 are made from an elastomeric material having advantageous acoustic vibration absorption properties, and form an anechoic coating of the shell 12.
- the external surface 14 then has significantly reduced acoustic wave reflection properties, and in particular sonar waves, which increases the stealth of the underwater vessel 10.
- the tiles 16 have, for example, a parallelepiped shape, with a rectangular or square base.
- the base is in this case the face of the tile 16 facing the shell 12.
- the tile 16 has an external side 18 and a fixing surface 20, extending on either side of the tile 16, as well as lateral edges 22.
- the tile 16 comprises a plurality of permanent magnets 24 ensuring the attachment of this tile 16 to the shell 12, arranged in the vicinity of the attachment surface 20.
- the magnets 24 are for example embedded in the tile 16, in the vicinity of the attachment surface 20, or else are flush with the attachment surface 20.
- the magnets 24 are for example magnets comprising neodymium, for example neodymium/iron/boron, having a rectangular or disc shape.
- the magnets 24 are of small size, each magnet 24 having a relatively low individual adhesive force compared to the total adhesive force of all the magnets 24. It is then the multiplicity of the magnets 24 which makes it possible to provide good adhesion of the hull equipment to the hull 12.
- the attachment surface 20 comprises an inner region 26 extending away from the edges 22, a peripheral region 28 surrounding the inner region 26 and extending in the vicinity of the edges 22, and a central region 30 extending in the middle of the attachment surface 20, surrounded by the inner region 26.
- the magnets 24 are arranged on the peripheral region 28 and the central region 30, the internal region 26 being devoid of magnets 24.
- This arrangement makes it possible to maximize the resistance to tearing of the tile 16, the stresses resulting in tearing of the tile 16 being located in the vicinity of the edges 22.
- the magnets 24 are arranged in a network on the fixing surface 24, for example a network forming a checkerboard.
- Each magnet 24 is thus adjacent to at least one nearest neighbor, for example to between one and four nearest neighbors in the case of a checkerboard network.
- adjacent is meant that the magnets 24 are in contact by a respective lateral edge, or that their respective neighboring lateral edges are in the vicinity of each other.
- each magnet 24 has a polarity oriented in a direction substantially orthogonal to the fixing surface 20.
- Each of the nearest neighbors of magnet 24 has a polarity oriented in the opposite direction to the polarity of magnet 24.
- the magnets 24 whose polarity is oriented towards the shell 12 are represented in white, and the magnets 24 whose polarity is oriented towards the outside are represented in gray.
- the proportion of magnets 24 whose polarity is oriented in one direction and the proportion of magnets 24 whose polarity is oriented in the opposite direction are substantially equal, advantageously equal.
- the material of the tiles 16 has advantageous properties of thermal insulation, absorption of electromagnetic waves, reduction of hydrodynamic drag, or others.
- the tiles 16 have a prism shape with a hexagonal base, which increases the resistance of the tile 16 to tearing. More generally, the shape of the base can be any geometry making it possible to ensure a desired covering of the external surface 14 of the shell 12.
- the magnets 24 are embedded in the tile in the vicinity of the fixing surface 20, for example at a distance of less than 5 mm from the fixing surface 20.
- the magnets 24 are glued to the tile 16 at the level of the fixing surface 20.
- the magnets 24 are groups of permanent magnets in contact or close to each other, having polarities oriented in the same direction, the groups of magnets being arranged in a network in an identical manner to the magnets 24 described above.
- the magnets 24 are arranged in a disorderly manner on the fixing surface 20, the proportion of magnets 24 whose polarity is oriented in one direction being substantially equal to the proportion of magnets 24 whose polarity is oriented in the opposite direction.
- the central region 30 is devoid of magnets 24, the magnets 24 being arranged on the peripheral region 26 only.
- the magnets 24 are arranged over the entirety of the fixing surface 20.
- the polarities of the magnets form a non-right angle with the fixing surface 20, or are tangent to the fixing surface 20.
- the magnets 24 are not adjacent to their nearest neighbors, but separated by a constant pitch from each of their nearest neighbors.
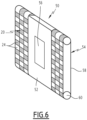
- edges 22 of each tile 16 are chamfered and adapted to cooperate with anti-slip ribs 32 extending on the external surface 14 of the shell 12. This makes it possible to increase the resistance of the tiles 16 to sliding along the external surface 14 of the shell 12.
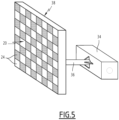
- the hull equipment comprises an active device, for example a projector 34, and a fixing plate 38.
- the projector 34 is mounted by means of a foot 36 on the fixing plate 38.
- the plate 38 defines a fixing surface 20, extending on a side of the plate 38 opposite the foot 36, and comprising the magnets 24 arranged in a network as previously described.
- the active equipment is, for example, a sensor, a camera, an antenna, a signaling device or a tool.
- the hull equipment is mobile equipment, for example a hull inspection robot 50 12.
- the robot 50 comprises a housing 52 and tracks 54.
- the housing 52 contains control electronics for the robot 50, a track drive motor 54, and means of communication.
- the shell 52 is adapted to seal off its contents from the outside, and includes a window 56 through which the sensors can take measurements, for example optical measurements.
- Each track 54 comprises a tread 58 arranged around at least two wheels 60.
- the wheels 60 are rotated by the motor and drive the tread 58, which is in contact with the external surface 14 of the hull 12.
- the fixing surface 20 extends over the tread 58, such that a portion of the fixing surface 20 is permanently in contact with the external surface 14 of the shell 12.
- the magnets 24 are embedded in the tread 58 and are flush with the surface of the tread 58.
- the magnets 24 are bonded to the surface of the tread 58.
- the magnets 24 located on the part of the fixing surface 20 in contact with the shell 12 then ensure that the robot 50 is held against the shell 12 during the movement of the robot 50.
- the robot 50 includes wheels or movable feet instead of the tracks 58, and the attachment surface 20 extends over an outer rolling surface of each wheel or under the movable feet.
- the robot 50 comprises a magnetic plate 70 on which extends the fixing surface 20, located under the robot 50, ensuring the fixing of the robot 50 to the shell 12, as well as non-magnetized wheels 72 ensuring its movement.
- the magnetic plate 70 is not directly in contact with the shell 12 but arranged in the vicinity of the shell 12, for example at a distance of less than 2 mm.
- the magnetic plate 70 then has an air gap with the shell 12.
- the contact between the robot 50 and the shell 12 takes place via the wheels 72, or via non-magnetic tracks or feet, which ensure the movement of the robot 50.
- the hull equipment described is reversibly fixable, and its installation is simple to implement and inexpensive in terms of specific material and labor, since the fixing is ensured by magnets which are simple to handle by a person skilled in the art.
- the hull equipment according to the invention is particularly advantageous in terms of magnetic signature.
- the alternation of the polarities of the magnets has the advantage of both generating a significant attractive force while minimizing the gradient of the magnetic field lines in the hull.
- the magnetization of the hull is modified on the surface and a few millimeters thick (in its depth) but in a much less significant way than a system comprising large magnets with or without alternating polarities.
- the magnetization of the shell is modified very locally and on the surface, which leads to a very slight modification of the magnetic field a few centimeters from the shell, but does not modify the magnetic field at greater distances.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Manipulator (AREA)
- Hard Magnetic Materials (AREA)
- Toys (AREA)
- Catching Or Destruction (AREA)
Description
- La présente invention concerne un bâtiment sous-marir muni d'un équipement de coque adapté pour être fixé de manière réversible sur une surface externe d'une structure en matériau ferromagnétique du bâtiment ou système marin ou sous-marin, l'équipement comprenant au moins une surface de fixation propre à permettre la fixation de l'équipement à la structure.
- Dans l'industrie navale, il est désirable de fixer des équipements sur la coque d'un bâtiment de manière simple et si possible de manière réversible. Il s'agit par exemple d'un revêtement de coque apportant des propriétés désirables au bâtiment, par exemple une amélioration de sa furtivité acoustique ou radar.
- Cela est particulièrement le cas en ce qui concerne les bâtiments sous-marin, puisqu'il est courant de recouvrir la coque de ceux-ci d'un revêtement technique.
- La fixation de ces revêtements est généralement assurée par collage, ce qui permet une installation rapide et simple, tout en restant peu coûteuse en termes de matériel et de personnel qualifié.
- Ces revêtements nécessitent cependant parfois d'être retirés, pour être remplacés ou pour accéder à la coque pour son entretien. Une fixation réversible est donc désirable, pour faciliter le retrait du revêtement, et pour pouvoir éventuellement le réutiliser une fois l'opération nécessitant le retrait terminée.
- Les systèmes de fixation réversible trouvent également une utilité pour des équipements de coque autres que des revêtements, comme des capteurs et des caméras. Il peut aussi s'agir de dispositifs mobiles comme des robots, dispositifs ou engins d'inspection de coque qui utilisent l'aspect réversible de la fixation au cours de leur déplacement.
- Il est connu de fixer les équipements de manière réversible au moyen de goujons filetés vissés dans des pions préalablement soudés à la coque du bâtiment, qui viennent écraser le revêtement sur la coque.
- Les systèmes de fixation réversibles précédents ne donnent pas entière satisfaction. En effet, une fixation par vissage nécessite de souder un grand nombre de pions sur la coque, ce qui est long et coûteux en termes de matériel et de main d'œuvre qualifiée. Le revêtement pour coque de bâtiment sous-marin décrit dans
US 2002/170481 A1 est un exemple connu. - Un but de l'invention est de fournir un équipement de coque, fixable de manière réversible, dont l'installation est simple à mettre en œuvre et peu coûteuse en termes de matériel spécifique et de main d'œuvre.
- A cet effet, l'invention a pour objet un bâtiment ou système marin ou sous-marin selon la revendication 1.
- La fixation d'un tel équipement à une structure ferromagnétique est simple et ne nécessite pas de matériel spécifique ni de personnel qualifié. L'équipement est maintenu contre la structure par les aimants permanents lors de l'utilisation du bâtiment marin ou sous-marin, et peut être retiré facilement lors d'opérations de maintenance ou de remplacement. Un tel système est de plus compact, simple et robuste, ainsi qu'inoffensif pour le support. Il ne nécessite par ailleurs pas d'apport d'énergie, et enfin est peu sensible au vieillissement.
- Selon des modes de réalisation particuliers, le bâtiment ou système marin ou sous-marin selon l'invention est selon l'une quelconque des revendications 2 à 7.
- L'invention sera mieux comprise à la lecture de la description qui va suivre, donnée uniquement à titre d'exemple et faite en se référant aux dessins annexés, parmi lesquels :
- la
figure 1 est une vue de côté un bâtiment sous-marin comprenant des équipements selon l'invention ; - la
figure 2 est une vue en perspective de l'un des équipements de lafigure 1 ; - la
figure 3 représente une vue arrière d'un détail de l'équipement de lafigure 2 ; - la
figure 4 représente une vue en coupe de trois équipements selon un deuxième mode de réalisation de l'invention ; - la
figure 5 est une vue en perspective d'un équipement selon un troisième mode de réalisation de l'invention ; et - la
figure 6 est une vue en perspective d'un équipement selon un quatrième mode de réalisation de l'invention. - Un bâtiment sous-marin 10 est représenté sur la
figure 1 . Le bâtiment sous-marin 10 comprend une coque 12 en matériau ferromagnétique, définissant une surface externe 14 et séparant de manière étanche un espace interne d'un extérieur du bâtiment sous-marin 10, et ce même sous l'effet de pressions extérieures. - Une pluralité d'équipements de coque est fixée sur la surface externe 14 de la coque 12. Les équipements de coque sont fixés à la surface externe 14 de manière réversible, c'est-à-dire qu'il est possible de les retirer de la surface externe 14 sans les endommager, ni endommager la coque 12.
- Notamment, il est possible de réassembler les équipements de coque sur la coque 12 après les avoir retirés, sans avoir à les modifier entre temps pour pouvoir effectuer le réassemblage.
- Selon un premier mode de réalisation représenté sur les
figures 1 à 4 , les équipements de coque sont des tuiles 16 formant un revêtement d'une partie de la coque 12 pour modifier au moins une propriété de la surface externe 14. - Par exemple, les tuiles 16 sont faites à partir d'un matériau élastomère présentant des propriétés avantageuses d'absorption des vibrations acoustiques, et forment un revêtement anéchoïque de la coque 12.
- La surface externe 14 présente alors des propriétés de réflexion des ondes acoustiques largement réduites, et notamment des ondes sonar, ce qui augmente la furtivité du bâtiment sous-marin 10.
- Les tuiles 16 présentent par exemple une forme parallélépipédique, avec une base rectangulaire ou carrée. La base est dans ce cas la face de la tuile 16 faisant face à la coque 12.
- Comme représenté sur la
figure 2 , la tuile 16 présente un côté externe 18 et une surface de fixation 20, s'étendant de part et d'autre de la tuile 16, ainsi que des bords 22 latéraux. - La tuile 16 comporte une pluralité d'aimants 24 permanents assurant la fixation de cette tuile 16 à la coque 12, disposés au voisinage de la surface de fixation 20. Les aimants 24 sont par exemple noyés dans la tuile 16, au voisinage de la surface de fixation 20, ou bien affleurent à la surface de fixation 20.
- Les aimants 24 sont par exemple des aimants comprenant du néodyme, par exemple en néodyme/fer/bore, présentant une forme rectangulaire ou en disque.
- Avantageusement, les aimants 24 sont de petite dimension, chaque aimant 24 présentant une force d'adhérence individuelle relativement faible par rapport à la force d'adhérence totale de l'ensemble des aimants 24. C'est alors la multiplicité des aimants 24 qui permet de fournir une bonne adhésion de l'équipement de coque sur la coque 12.
- Selon le mode de réalisation de la
figure 2 , la surface de fixation 20 comporte une région interne 26 s'étendant à l'écart des bords 22, une région périphérique 28 entourant la région interne 26 et s'étendant au voisinage des bords 22, et une région centrale 30 s'étendant au milieu de la surface de fixation 20, entourée par la région interne 26. - Les aimants 24 sont disposés sur la région périphérique 28 et la région centrale 30, la région interne 26 étant dépourvue d'aimants 24.
- Cette disposition permet de maximiser la résistance à l'arrachement de la tuile 16, les contraintes résultant en un arrachement de la tuile 16 étant localisées au voisinage des bords 22.
- Les aimants 24 sont disposés selon un réseau sur la surface de fixation 24, par exemple un réseau formant un damier.
- Chaque aimant 24 est ainsi adjacent à au moins un plus proche voisin, par exemple à entre un et quatre plus proches voisins dans le cas d'un réseau en damier.
- Par adjacent, on entend que les aimants 24 sont en contact par un bord latéral respectif, ou bien que leurs bords latéraux voisins respectifs sont au voisinage l'un de l'autre.
- Comme représenté sur la
figure 3 , chaque aimant 24 présente une polarité orientée selon une direction sensiblement orthogonale à la surface de fixation 20. - Chacun des plus proches voisins de l'aimant 24 présente une polarité orientée en sens inverse de la polarité de l'aimant 24.
- Par convention, sur les figures, les aimants 24 dont la polarité est orientée vers la coque 12 sont représentés en blanc, et les aimants 24 dont la polarité est orientée vers l'extérieur sont représentés en gris.
- Ainsi, la proportion d'aimants 24 dont la polarité est orientée dans un sens et la proportion d'aimants 24 dont la polarité est orientée en sens inverse sont sensiblement égales, avantageusement égales.
- Selon une variante, le matériau des tuiles 16 présente des propriétés avantageuses d'isolation thermique, d'absorption des ondes électromagnétiques, de réduction de la trainée hydrodynamique, ou autres.
- Selon une variante, les tuiles 16 présentent une forme de prisme à base hexagonale, ce qui augmente la résistance de la tuile 16 à l'arrachement. Plus généralement, la forme de la base peut être n'importe quelle géométrie permettant d'assurer un recouvrement désiré de la surface externe 14 de la coque 12.
- Selon une variante, les aimants 24 sont noyés dans la tuile au voisinage de la surface de fixation 20, par exemple à une distance inférieure à 5 mm de la surface de fixation 20.
- Selon une variante, les aimants 24 sont collés sur la tuile 16 au niveau de la surface de fixation 20.
- Selon une variante, les aimants 24 sont des groupes d'aimants permanents en contact ou proches les uns des autres, présentant des polarités orientées selon une même direction, les groupes d'aimants étant agencés en réseau de manière identique aux aimants 24 décrits plus haut.
- Selon une variante, les aimants 24 sont arrangés de façon désordonnée sur la surface de fixation 20, la proportion d'aimants 24 dont la polarité est orientée dans un sens étant sensiblement égale à la proportion d'aimants 24 dont la polarité est orientée en sens inverse.
- Selon une variante, la région centrale 30 est dépourvue d'aimants 24, les aimants 24 étant disposés sur la région périphérique 26 uniquement.
- Selon une variante, les aimants 24 sont disposés sur l'intégralité de la surface de fixation 20.
- Selon une variante, les polarités des aimants forment un angle non droit avec la surface de fixation 20, ou bien sont tangentes à la surface de fixation 20.
- Selon une variante, les aimants 24 ne sont pas adjacents à leurs plus proches voisins, mais séparés d'un pas constant de chacun de leurs plus proches voisins.
- Selon une variante représentée
figure 4 , les bords 22 de chaque tuile 16 sont chanfreinés et adaptés pour coopérer avec des nervures anti-glissement 32 s'étendant sur la surface externe 14 de la coque 12. Cela permet d'augmenter la résistance des tuiles 16 au glissement le long de la surface externe 14 de la coque 12. - Selon un deuxième mode de réalisation représenté
figure 5 , l'équipement de coque comporte un dispositif actif, par exemple un projecteur 34, et une dalle 38 de fixation. - Le projecteur 34 est monté par l'intermédiaire d'un pied 36 sur la dalle 38 de fixation. La dalle 38 définit une surface de fixation 20, s'étendant sur un côté de la dalle 38 opposé au pied 36, et comportant les aimants 24 agencés selon un réseau comme précédemment décrit.
- En variante, l'équipement actif est par exemple un capteur, une caméra, une antenne, un dispositif de signalisation ou un outil.
- Selon un troisième mode de réalisation représenté sur la
figure 6 , l'équipement de coque est un équipement mobile, par exemple un robot 50 d'inspection de la coque 12. - Le robot 50 comprend un boitier 52 et des chenilles 54.
- Le boitier 52 contient une électronique de contrôle du robot 50, un moteur d'entrainement des chenilles 54, et des moyens de communication. La coque 52 est adaptée pour isoler de façon étanche son contenu de l'extérieur, et comporte une fenêtre 56 à travers laquelle les capteurs peuvent réaliser des mesures, par exemple des mesures optiques.
- Chaque chenille 54 comprend une bande de roulement 58 disposée autour d'au moins deux roues 60. Les roues 60 sont mises en rotation par le moteur et entraînent la bande de roulement 58, qui est en contact avec la surface externe 14 de la coque 12.
- La surface de fixation 20 s'étend sur la bande de roulement 58, de sorte qu'une partie de la surface de fixation 20 est en permanence au contact de la surface externe 14 de la coque 12. Les aimants 24 sont noyés dans la bande de roulement 58 et affleurent à la surface de la bande de roulement 58.
- En variante, les aimants 24 sont collés à la surface de la bande de roulement 58.
- Les aimants 24 situés sur la partie de la surface de fixation 20 au contact de la coque 12 assurent alors le maintien du robot 50 contre la coque 12 au cours du déplacement du robot 50.
- En variante, le robot 50 comprend des roues ou des pieds mobiles au lieu des chenilles 58, et la surface de fixation 20 s'étend sur une surface externe de roulement de chaque roue ou sous les pieds mobiles.
- En variante représentée
figure 7 , le robot 50 comprend une plaque aimantée 70 sur laquelle s'étend la surface de fixation 20, située sous le robot 50, assurant la fixation du robot 50 à la coque 12, ainsi que des roues 72 non aimantées assurant son déplacement. Dans ce cas, la plaque aimantée 70 n'est pas directement au contact de la coque 12 mais disposée au voisinage de la coque 12, par exemple à une distance inférieure à 2 mm. - La plaque aimantée 70 présente alors un entrefer avec la coque 12. Le contact entre le robot 50 et la coque 12 a lieu par les roues 72, ou par des chenilles ou des pieds non aimantés, qui assurent le déplacement du robot 50.
- L'équipement de coque décrit est fixable de manière réversible, et son installation est simple à mettre en œuvre et peu coûteuse en termes de matériel spécifique et de main d'œuvre, puisque la fixation est assurée par des aimants simples à manipuler par homme du métier.
- De plus, l'équipement de coque selon l'invention est particulièrement avantageux en termes de signature magnétique. En effet, l'alternance des polarités des aimants présente l'avantage à la fois de générer une force d'attraction importante tout en minimisant le gradient des lignes de champ magnétique dans la coque. L'aimantation de la coque est modifiée en surface et à quelques millimètres d'épaisseur (dans sa profondeur) mais de manière bien moins importantes qu'un système comportant des aimants de grandes dimensions présentant ou pas une alternance de polarités.
- L'aimantation de la coque est modifiée très localement et en surface, ce qui conduit à une très légère modification du champ magnétique à quelques centimètres de la coque, mais ne modifie pas le champ magnétique à des distances plus importantes.
Claims (7)
- Bâtiment (10) sous-marin muni d'un équipement de coque fixé de manière réversible sur une surface externe (14) d'une structure (12) en matériau ferromagnétique du bâtiment (10) sous-marin, l'équipement de coque comprenant au moins une surface de fixation (20) propre à permettre la fixation de l'équipement de coque à la structure (12), la surface de fixation (20) étant disposée au voisinage de la structure (12),caractérisé en ce que l'équipement de coque comporte une pluralité d'aimants (24) permanents agencés au voisinage de la surface de fixation (20) pour assurer la fixation de l'équipement de coque à la structure (12), et dans lequel les aimants (24) sont disposés selon un réseau sur la surface de fixation (20), chaque aimant (24) étant adjacent à ou au voisinage d'au moins un plus proche voisin, chaque aimant (24) présentant une polarité, la polarité de chaque aimant (24) étant orientée en sens inverse de la polarité de son au moins un plus proche voisin,dans lequel l'équipement de coque comprend une tuile (16) de matériau élastomère destinée à former un revêtement d'au moins une partie de la coque (12).
- Bâtiment (10) sous-marin selon la revendication 1, dans lequel le réseau forme un damier, chaque aimant (24) étant adjacent à ou au voisinage d'entre un et quatre plus proches voisins.
- Bâtiment (10) sous-marin selon la revendication 1 ou 2, dans lequel les aimants (24) sont noyés dans la tuile (16) au voisinage de la surface de fixation (20), ou affleurent à la surface de fixation (20).
- Bâtiment (10) sous-marin selon l'une quelconque des revendications précédentes, dans lequel la surface de fixation (20) comporte une région interne (26) s'étendant à l'écart des bords (22) de la tuile (16) et une région périphérique (28) entourant la région interne (26) et s'étendant au voisinage des bords (22) de la tuile (16), les aimants (24) étant disposés sur au moins une partie de la région périphérique (28) de la surface de fixation (20), la région interne (26) de la surface de fixation étant dépourvue d'aimants (24).
- Bâtiment (10) sous-marin selon l'une quelconque des revendications précédentes, dans lequel la tuile (16) présente au moins un bord (22) chanfreiné adapté pour coopérer avec une nervure (32) anti-glissement s'étendant sur la surface externe (14) de la coque (12).
- Bâtiment (10) sous-marin selon l'une quelconque des revendications précédentes, dans lequel l'équipement de coque comprend au moins une roue, au moins un pied mobile, ou au moins une chenille (54), la surface de fixation (20) s'étendant sur une bande de roulement (58) de la roue ou de la chenille (54) ou sous le pied mobile, l'équipement de coque étant apte à se déplacer le long de la surface externe (14) de la coque (12) tout en étant maintenu en contact avec la coque (12) par les aimants (24) de la surface de fixation (20).
- Bâtiment (10) sous-marin selon l'une quelconque des revendications précédentes, dans lequel l'équipement de coque comprend une plaque aimantée, propre à être disposée au voisinage de la structure (12), la surface de fixation (20) s'étendant sur la plaque aimantée, l'équipement de coque comprenant également au moins une roue, au moins une chenille (58) ou au moins un pied adapté pour déplacer l'équipement de coque par rapport à la structure, la roue, la chenille (58) ou le pied étant non-aimanté.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1701196A FR3073811B1 (fr) | 2017-11-20 | 2017-11-20 | Equipement de coque |
| PCT/EP2018/081786 WO2019097056A1 (fr) | 2017-11-20 | 2018-11-19 | Equipement de coque |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3713841A1 EP3713841A1 (fr) | 2020-09-30 |
| EP3713841C0 EP3713841C0 (fr) | 2025-06-04 |
| EP3713841B1 true EP3713841B1 (fr) | 2025-06-04 |
Family
ID=61655814
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18800976.5A Active EP3713841B1 (fr) | 2017-11-20 | 2018-11-19 | Equipement de coque |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US11634199B2 (fr) |
| EP (1) | EP3713841B1 (fr) |
| JP (1) | JP7232830B2 (fr) |
| KR (1) | KR102613246B1 (fr) |
| AU (1) | AU2018368617B2 (fr) |
| BR (1) | BR112020009392A2 (fr) |
| ES (1) | ES3038158T3 (fr) |
| FR (1) | FR3073811B1 (fr) |
| WO (1) | WO2019097056A1 (fr) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102376907B1 (ko) * | 2020-07-21 | 2022-03-22 | 대우조선해양 주식회사 | 선체 외부에 독립적으로 부착 가능한 계측기구 |
| KR200498650Y1 (ko) * | 2022-04-19 | 2024-12-20 | 주식회사 뉴로센스 | 차량의 내부에 설치되는 감지 센서 |
| KR102703044B1 (ko) * | 2022-10-31 | 2024-09-04 | 주식회사 에스아이웨어 | 선체 외판 이동용 자동 도장장치 |
| KR102703045B1 (ko) * | 2022-10-31 | 2024-09-04 | 주식회사 에스아이웨어 | 선체 외판 곡면을 인식하며 도장액을 분사하는 자동 도장장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2958019A (en) * | 1956-09-17 | 1960-10-25 | Indiana General Corp | Magnetic pad assembly |
| WO2010078299A1 (fr) * | 2008-12-30 | 2010-07-08 | Sanford L.P. | Matrice magnétique pour fixer un objet à une surface ferromagnétique |
| US20120255152A1 (en) * | 2011-04-08 | 2012-10-11 | Evans Robert B | Surface flow enhancement device and method of using the same on a vehicle |
| US20140103169A1 (en) * | 2012-10-16 | 2014-04-17 | Serpent And Dove - Applied Magnetics Pty Ltd | Magnetic Clamp |
| GB2514626A (en) * | 2013-06-01 | 2014-12-03 | Peter John Charles Spurgeon | An aquatic fender |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59122509U (ja) * | 1983-02-07 | 1984-08-17 | 三菱重工業株式会社 | 喫水読取装置 |
| FR2568401B1 (fr) * | 1984-07-26 | 1986-12-26 | Sauveplane Francois | Dispositif magnetique pour assembler, de maniere provisoire, deux elements, notamment des elements aptes a constituer un coffrage |
| US5038701A (en) * | 1990-03-23 | 1991-08-13 | Riddell Floyd A | Method and means for covering openings in hulls of damaged ships |
| JPH06504019A (ja) * | 1990-09-11 | 1994-05-12 | ゴウルディング,デイル・エルヴィス | 破裂したタンクを封止する装置及び方法 |
| US6532886B2 (en) * | 2001-05-18 | 2003-03-18 | The United States Of America As Represented By The Secretary Of The Navy | Multi-functional cellular surface for underwater vehicles |
| US20090260556A1 (en) * | 2008-04-17 | 2009-10-22 | Ronald Clifford Sahr | Magnetically Attached Floor Covering for a Boat |
| US20140230711A1 (en) * | 2009-11-23 | 2014-08-21 | Searobotics Corporation | Mobile Operations Chassis with Controlled Magnetic Attraction to Ferrous Surfaces |
| KR101291150B1 (ko) * | 2011-07-15 | 2013-07-31 | 삼성중공업 주식회사 | 선체 벽면 작업용 로봇 및 그 제어방법 |
| KR101339203B1 (ko) * | 2011-10-19 | 2013-12-13 | 대한민국(해양경찰청장) | 저압용 액체 유출 방지장치 |
| JP5849907B2 (ja) | 2012-02-09 | 2016-02-03 | 新日鐵住金株式会社 | 磁性体移動車用車輪および磁性体移動車 |
| US9038557B2 (en) * | 2012-09-14 | 2015-05-26 | Raytheon Company | Hull robot with hull separation countermeasures |
| US10199146B2 (en) * | 2014-09-26 | 2019-02-05 | Elliott Chewins | Removable fluid barrier |
| KR101691291B1 (ko) | 2015-04-02 | 2016-12-29 | 황종하 | 선박용 유해물질 유출 및 침수차단장치 |
| NO341869B1 (en) * | 2016-08-26 | 2018-02-12 | Bri Norhull As | Holding means for holding an apparatus against a metallic surface |
-
2017
- 2017-11-20 FR FR1701196A patent/FR3073811B1/fr active Active
-
2018
- 2018-11-19 WO PCT/EP2018/081786 patent/WO2019097056A1/fr not_active Ceased
- 2018-11-19 EP EP18800976.5A patent/EP3713841B1/fr active Active
- 2018-11-19 ES ES18800976T patent/ES3038158T3/es active Active
- 2018-11-19 JP JP2020527786A patent/JP7232830B2/ja active Active
- 2018-11-19 US US16/765,244 patent/US11634199B2/en active Active
- 2018-11-19 KR KR1020207013653A patent/KR102613246B1/ko active Active
- 2018-11-19 AU AU2018368617A patent/AU2018368617B2/en not_active Ceased
- 2018-11-19 BR BR112020009392-0A patent/BR112020009392A2/pt active Search and Examination
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2958019A (en) * | 1956-09-17 | 1960-10-25 | Indiana General Corp | Magnetic pad assembly |
| WO2010078299A1 (fr) * | 2008-12-30 | 2010-07-08 | Sanford L.P. | Matrice magnétique pour fixer un objet à une surface ferromagnétique |
| US20120255152A1 (en) * | 2011-04-08 | 2012-10-11 | Evans Robert B | Surface flow enhancement device and method of using the same on a vehicle |
| US20140103169A1 (en) * | 2012-10-16 | 2014-04-17 | Serpent And Dove - Applied Magnetics Pty Ltd | Magnetic Clamp |
| GB2514626A (en) * | 2013-06-01 | 2014-12-03 | Peter John Charles Spurgeon | An aquatic fender |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102613246B1 (ko) | 2023-12-12 |
| US11634199B2 (en) | 2023-04-25 |
| US20200283107A1 (en) | 2020-09-10 |
| AU2018368617B2 (en) | 2024-03-07 |
| FR3073811A1 (fr) | 2019-05-24 |
| EP3713841C0 (fr) | 2025-06-04 |
| JP2021503410A (ja) | 2021-02-12 |
| JP7232830B2 (ja) | 2023-03-03 |
| KR20200083489A (ko) | 2020-07-08 |
| WO2019097056A1 (fr) | 2019-05-23 |
| FR3073811B1 (fr) | 2020-11-20 |
| ES3038158T3 (en) | 2025-10-09 |
| AU2018368617A1 (en) | 2020-05-28 |
| BR112020009392A2 (pt) | 2020-11-03 |
| EP3713841A1 (fr) | 2020-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3713841B1 (fr) | Equipement de coque | |
| EP3057201B1 (fr) | Rotor de moteur électrique et moteur électrique correspondant | |
| EP1035017B1 (fr) | Procédé de simulation des flux thermiques externes absorbés en vol par les éléments radiatifs extérieurs d'un engin spatial et engin spatial pour la mise en oeuvre de ce procédé | |
| FR2523542A1 (fr) | Element profile destine a deporter lateralement un ensemble remorque par rapport a la trajectoire du remorqueur | |
| EP0003091A1 (fr) | Joint annulaire | |
| FR2727484A1 (fr) | Structure d'attache pour gaine en forme de soufflet | |
| FR2938599B1 (fr) | Dispositif de vitrage acoustiquement isolant notamment pour aeronef et procede d'isolation acoustique pour vitrage | |
| Tavakoli et al. | Magnetic omnidirectional wheels for climbing robots | |
| EP2406625B1 (fr) | Dispositif et procédé de contrôle non-destructif par ultrasons de structures complexes | |
| EP0125180A1 (fr) | Dispositif de déminage à distance de mines à mise à feu magnétique | |
| EP3198586B1 (fr) | Antenne omnidirectionnelle | |
| US20130229894A1 (en) | Underwater sensor arrays linearized by weight and buoyance distribution | |
| WO2004105176A3 (fr) | Antenne subaquatique | |
| EP0384874A2 (fr) | Dispositif de détection de passage de véhicules sur une chaussée à film piézo-électrique | |
| WO2012022857A1 (fr) | Generateur de champ magnetique pour appareil thermique magnetocalorioue | |
| FR3027586A1 (fr) | Engin sous-marin a portance variable selon le mode de navigation | |
| FR2947240A1 (fr) | Fenetre marine et son procede d'installation en affleurement de la face exterieure des parois de structure d'un navire | |
| EP3474568B1 (fr) | Paroi de véhicule et véhicule de transport associé | |
| FR2938482A1 (fr) | Vehicule personnel a equilibrage dynamique | |
| WO2025031899A1 (fr) | Dispositif d'ondulation pour dispositif générateur de flux fluidique | |
| GR20230100329A (el) | Αμφιβιο αρθρωτο μαγνητικο ερπυστριοφορο οχημα | |
| WO2003069594A2 (fr) | Antenne acoustique surfacique pour sous-marins | |
| FR2862922A1 (fr) | Remorque pour le transport de vehicule, notamment d'engins flottants. | |
| EP4448196A1 (fr) | Ensemble de protection d'une unité de nettoyage d'une surface optique par ondes ultrasonores, avec recouvrement en matériau absorbant d'onde électromagnétique | |
| FR2833675A1 (fr) | Bavette fixee sur un panneau de toiture assurant l'etancheite par simple rabat sur le panneau adjacent |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200515 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20220711 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20250204 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602018082428 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| U01 | Request for unitary effect filed |
Effective date: 20250701 |
|
| U07 | Unitary effect registered |
Designated state(s): AT BE BG DE DK EE FI FR IT LT LU LV MT NL PT RO SE SI Effective date: 20250707 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 3038158 Country of ref document: ES Kind code of ref document: T3 Effective date: 20251009 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250904 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250604 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250604 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250904 |
|
| U20 | Renewal fee for the european patent with unitary effect paid |
Year of fee payment: 8 Effective date: 20251010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20251004 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20251126 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250604 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250604 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250604 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20251210 Year of fee payment: 8 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: L10 Free format text: ST27 STATUS EVENT CODE: U-0-0-L10-L00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260416 |