EP3721071B1 - Verfahren und vorrichtung zur charakterisierung des einspritzverhaltens eines einspritzventils für flüssigkeiten - Google Patents
Verfahren und vorrichtung zur charakterisierung des einspritzverhaltens eines einspritzventils für flüssigkeiten Download PDFInfo
- Publication number
- EP3721071B1 EP3721071B1 EP18789061.1A EP18789061A EP3721071B1 EP 3721071 B1 EP3721071 B1 EP 3721071B1 EP 18789061 A EP18789061 A EP 18789061A EP 3721071 B1 EP3721071 B1 EP 3721071B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- spray
- image
- injection
- recording device
- denotes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M65/00—Testing fuel-injection apparatus, e.g. testing injection timing ; Cleaning of fuel-injection apparatus
- F02M65/001—Measuring fuel delivery of a fuel injector
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B12/00—Arrangements for controlling delivery; Arrangements for controlling the spray area
- B05B12/08—Arrangements for controlling delivery; Arrangements for controlling the spray area responsive to condition of liquid or other fluent material to be discharged, of ambient medium or of target ; responsive to condition of spray devices or of supply means, e.g. pipes, pumps or their drive means
- B05B12/082—Arrangements for controlling delivery; Arrangements for controlling the spray area responsive to condition of liquid or other fluent material to be discharged, of ambient medium or of target ; responsive to condition of spray devices or of supply means, e.g. pipes, pumps or their drive means responsive to a condition of the discharged jet or spray, e.g. to jet shape, spray pattern or droplet size
Definitions
- the invention relates to a method for characterizing the injection behavior of an injection valve for liquids and a device for carrying out such a method.
- a device and a method for determining at least the spray quantity and/or the spray rate of a liquid sprayed with a valve are known.
- the device has a measuring chamber and an interface for accommodating the valve, at least one sensor for measuring a state prevailing in the measuring chamber, and an evaluation device connected to the sensor for determining the spray quantity and/or the spray rate at least as a function of the measured state.
- the device and the method for determining the spray quantity and/or the spray rate make it possible to determine and evaluate a further parameter of the liquid at the same time.
- This additional parameter is the spray pattern of the sprayed liquid and is recorded by a device for recording the spray pattern of the sprayed liquid.
- an optical marriage Chamber used, wherein the jet pattern is determined and evaluated simultaneously to the spray quantity and / or the spray rate of the evaluation device.
- the method comprises the steps of injecting liquid through the injection valve into a measuring chamber, irradiating light into the measuring chamber onto liquid ejected from the injection valve as a spray pattern, detecting and scanning temporally successive jet images which are emitted from interfaces of the liquid ejected from the injection valve.
- the light reflected from the spray pattern and imaged onto a recording device is generated in order to obtain spatially resolved intensity distributions, evaluating the intensity distributions associated with the detected and scanned beam images, with image matrix elements being identified in the respective intensity distributions which contain image information associated with the imaged spray pattern, and based on of the respectively identified image matrix elements or pixels and their time development, a measure for the injection behavior is determined.
- the invention is therefore based on the finding that with a suitable measuring chamber pressure at a phase boundary between a gas phase/liquid phase representing an injection process and a liquid phase/gas phase located in the measuring chamber, light reflected and then imaged as an optical snapshot represents a temporally "frozen” state of the injection behavior, since during the injection process into the measuring chamber filled with the liquid medium, cavitation manifests itself as a spray pattern, so that the opening and closing of the injection valve is clearly correlated with the occurrence and disappearance of cavitation; the evaluation of such "frozen" snapshots of a cavitation event thus provides information about its development over time, from which a parameter for characterizing the injection behavior can be derived.
- Summation index where m represents the total number of evaluated image matrix elements and K j denotes a respective correlation factor, which takes into account a light intensity information value I(P j , t) recorded in the respectively assigned image matrix element, with only those image matrix elements P j being taken into account when forming the sum, whose Light intensity values are greater than the limit value G or equal to the limit value G in order to identify image matrix elements associated with the spray pattern contained in the respective spray image.
- the recording device is expediently set in such a way that a cross-sectional plane of the ejected spray pattern is sharply imaged as a jet image, as a result of which a two-dimensional image of the spray pattern can be displayed.
- a variant of the method with which a quasi three-dimensional image of a spray pattern on which the optical detection is based can be displayed can consist in imaging and scanning different cross-sectional planes in sequentially recorded spray images, with each the focal length of the recording device is changed and/or the recording device is shifted with regard to its optical distance from the measuring chamber.
- the jet propagation radii are calibrated by taking into account an object size relevant to imaging, preferably a nozzle diameter of the injector to be tested, and/or an imaging scale of the recording device and/or a resolution of the recording device, so that the parameter can be represented in absolute units.
- hydraulic measurements to determine a hydraulically obtained parameter such as the injection rate and/or the injection quantity are carried out in the measuring chamber simultaneously with the optical detection of spray patterns be correlated with hydraulically obtained measurement data with regard to the parameter.
- the hydraulically obtained measurement results can be checked and verified immediately by means of the optical detection carried out at the same time, so that measurement artifacts occurring during the hydraulic measurement value acquisition can be recognized due to the low-pass filtering required for this.
- an injection rate F(t) normalized to a maximum of 1 can be determined from the optically determined relative injection rate n(t) and by including the hydraulic measurement results, an absolute injection rate A(t) can be determined by scaling the hydraulically measured injection rate, which corresponds to the integral over the rate.
- a jet impulse can be determined as a further parameter to characterize the injection behavior, with the jet impulse being determined from the optically obtained spray propagation speed v(t i ) and from a hydraulically obtained injection quantity by respective product formation.
- a three-dimensional image of the spray pattern can expediently be generated from the various cross-sectional planes at any point in time during the injection.
- a jet propagation speed along the jet axis is determined from the three-dimensional image of the spray pattern.
- the device according to the subject matter of claim 10, which is intended for carrying out the method according to the invention, has a simple design and reliably delivers quantitative results for characterizing the injection behavior of an injection valve or fuel injector.
- the device comprises an evaluation device which has a data transmission connection to the recording device in order to process and evaluate beam images detected and scanned by the recording device, with the evaluation device identifying those image matrix elements in intensity distributions of respective beam images recorded by the recording device which Contain spray pattern associated image information, and based on the respectively identified image matrix elements and their time development determines a measure of the injection behavior.
- the recording device can be moved along its optical axis by means of an associated positioning device in order to change the optical path length between the recording device and the measuring chamber.
- This makes it possible to optically move through and detect different cross-sectional planes of the spray pattern ejected from the injection valve one after the other, in order to achieve a quasi three-dimensional representation.
- the recording device is expediently designed as a digital camera in order to record a spatially resolved intensity profile for each detected and scanned beam image, which simplifies the evaluation of the optically obtained data and enables a compact design of the device.
- FIG. 12 shows, in a highly schematic sectional view, the device designated as a whole by 10 , which has a measuring chamber 11 and an optical recording device 12 as well as an illumination device 13 .
- the measuring chamber 11 is used for testing injectors and has a housing 14 which is provided for receiving an injector 15 to be tested, which is inserted centrally in an opening provided for this purpose in a wall of the housing 14 arranged at the top, so that the spray holes provided with it Injector end protrudes into the measuring chamber 11.
- the measuring chamber 11 has a functionality as a hydraulic pressure increase analyzer; when the injector 15 injects liquid through its injection openings or spray holes into the liquid-filled measuring chamber 11 and the pressure in the measuring chamber 11 thereby rises, the pressure and the speed of sound in the measuring chamber 11 can be measured in a conventional manner by means of the pressure sensor 16 and of the ultrasonic transducer device 17, a characteristic parameter of the injector, namely the injection rate, can be determined.
- the device 10 has an optical sensor functionality in order to optically detect the spray pattern 30 generated during the injection process at the spray holes of the injector 15 as a cross-sectional plane of the spray pattern 18 by the fuel exiting there and to analyze quantitatively by means of an evaluation device, not shown.
- the housing 14 has, on its bottom side 14 ′ arranged opposite the injector 15 , an optical access 20 which is accommodated approximately in the center and is designed as an optically transparent window.
- the lighting device 13 is designed as a ring-shaped light-emitting diode arrangement (LED arrangement) and is arranged on the outside on the bottom side 14' of the housing 14 in such a way that the inner ring surface of the LED arrangement 13 encloses a section of the optical window 20 that protrudes from the bottom side 14'. Light emitted by the ring-shaped LED arrangement 13 then passes through the optical window 20 into the measuring chamber 11.
- LED arrangement light-emitting diode arrangement
- the inner wall of the measuring chamber 11 is blackened, see above that light radiated into the measuring chamber 11 is essentially reflected at phase boundaries, which arise from cavitation during the injection process from the spray holes of the injector 15 to be tested in the form of beam lobes and form a spray pattern 18 .
- the ring-shaped LED arrangement 13, the optical window 20 and the injector 15 are expediently arranged concentrically to one another along the longitudinal axis 11' of the measuring chamber 11.
- the recording device 12 is fastened together with the upstream lens 22 on a positioning carriage 24 which is designed to be horizontally displaceable along a guide 25 in order to be able to vary the image plane of the recording device 12 independently of its focus setting.
- a control and evaluation device (not shown) is used on the one hand to control the positioning carriage 24, to control the injection behavior of the injector 15, for the pulsed control of the light emission of the LED arrangement and for the time-matched recording behavior of the recording device 12 and on the other hand to evaluate the data from the image sensor the light intensities detected by the recording device 12;
- the control and evaluation device is electrically connected via control and data lines (not shown) to control electronics of the injector, to the LED arrangement, to the recording camera and its lens and to control electronics of the positioning carriage.
- the control and evaluation device carries out a correlation of the optically obtained data with the hydraulic data obtained simultaneously from the pressure and sound velocity measurement.
- Figure 1B shows a diagram 27, in which measurements achieved with the device 10 according to the invention are shown, which on the one hand hydraulically recorded measurements in two diagrams 28, 28' for two successive injections of the injector to be tested and cavitation images 30' correlated in time thereto and optically recorded, 30".
- the injection mass m determined on the basis of the pressure p continuously measured in the measuring chamber and the measured speed of sound c and the injection rate dm/dt as a function of the time t during a multiple injection consisting of, for example, shown pre
- Each of the two diagrams 28, 28' is assigned a control pulse sequence with which the injection of the injector can be controlled, for example by using a triangular sawtooth pulse for the pre-injection 29, a trapezoidal pulse 29' is used for the main injection and a trapezoidal pulse 29'' for the post-injection, with a shorter pulse duration compared to the main injection.
- a control signal 39 for actuating the light-emitting diodes of the lighting device is also shown for each of the two diagrams 28, 28', with which the measuring chamber is illuminated synchronously with the injection, the control signal having an essentially rectangular pulse shape, the pulse length of which is dimensioned such that it extends over the pre-, main and post-injection Figure 1B further illustrated, a cavitation event is the more pronounced the higher the injection rate dm/dt, because the cavitation image 30' recorded at the same time as a pre-injection is significantly less pronounced than the cavitation image 30" recorded during a main injection at a high injection rate, its running in the radial direction Beam lobes, on the other hand, have a significantly longer range.
- a control pulse is transmitted synchronously to the electronics of the injector 15, the LED arrangement 13, the recording camera 12, the lens 22, so that the injector 15 ejects fuel from its spray holes and injects it into the measuring chamber 11; at the same time, the LED ring 13 emits a pulse of light, the lens 22 sets the aperture and focus, and the recording camera 12 opens its shutter for a predetermined exposure time so that light emitted by the LED ring 13 is at the phase boundary of the light emitted by the injector as Spray pattern 18 ejected fuel is reflected from the measuring chamber 11 via the optical window 20, the deflection mirror 21 and the lens 22 on the image sensor of the recording camera 12 or is imaged.
- a second method step 102 which takes place during the exposure phase, the image plane of the lens 11 is focused on the plane of the spray holes of the injector 15 in order to focus the spray pattern or cavitation image typically generated during the injection process of the injector on the image sensor.
- a control pulse is again sent to the electronics of the injector 15, the LED arrangement 13 and to the recording camera 12, whereupon in a following method step 104 a first individual image is recorded.
- the individual image currently recorded immediately beforehand is stored on a storage medium as an image matrix with image matrix elements or pixels in which the respective light intensities are recorded.
- a continuous query is made as to whether the preset sequence of individual images has already been processed. If the query result is negative, a return is made to step 103 and the procedure with steps 104 and 105 for capturing and storing the next individual image in each case within one step 103 to 106 comprehensive loop, is run through cyclically with incrementing a loop index by a counter 1, while on the other hand if the query result is positive, ie if a sequence of individual images is recorded and stored, the loop is terminated or exited in order to in a subsequent method step 107 Initiate a jump into an evaluation process. Due to the optical device configuration, the individual images obtained in this embodiment of the control and measurement data acquisition method are cross sections through the cavitation generated by the injector along the image plane set to be constant on the lens 22 .
- Figure 2B Using a highly schematic flowchart 100', shows the essential method steps of the control method according to a second method variant, which is used to synchronize various device components, ie the recording camera, its lens and the LED arrangement and the positioning carriage with the injection process of the injector to be tested .
- the positioning carriage 24 is also controlled in order to be able to move the recording camera 12 attached thereto together with the upstream lens 22 independently of the set lens focal length along the guide rail 25 .
- an initializing method step 101' the positioning carriage is moved to an initial or starting position.
- a control pulse signal is emitted synchronously to the electronics of the injector 15 to be tested, the LED arrangement 13, the recording camera 12 and its lens 22. so that the injector 15 ejects fuel from its spray holes and injects it into the metering chamber 11; at the same time, the LED ring 13 emits a pulse of light, the lens 22 sets the aperture and focus, and the recording camera 12 opens its shutter for a predetermined exposure time so that light emitted by the LED ring 13 is at the phase boundary of the light emitted by the injector as Reflected spray pattern 18 released fuel and from the measuring chamber 11 via the optical components 20, 21, and 22 on the image sensor of the recording camera 12 or is imaged.
- a method step 103′ still taking place during the exposure phase, the image plane of the lens 22 is focused on the plane of the spray holes of the injector 15 in order to focus the spray pattern typically generated during the injection process of the injector as a cavitation image onto the image sensor.
- a control pulse signal is sent to the electronics of the injector 15, to the LED arrangement 13, to the recording camera 12 and delivered to the lens, whereupon in an immediately following method step 105' an individual image is captured and in a further method step 106' is stored as an image matrix in a storage medium.
- a subsequent test step 108' a continuous query is made as to whether the preset sequence has already been processed.
- step 104' If the query result is negative, a return is made to step 104' and the procedure with steps 105' and 106' for capturing and storing the next frame within a loop comprising steps 104' to 108' is run through cyclically, with the loop index for counting the individual images being increased or incremented by a counter of 1, while, on the other hand, if the query result is positive, ie when the sequence of individual images has been recorded and stored, the Loop is terminated or exited in order to initiate a jump to an evaluation method—to be explained below—in a subsequent method step 109'.
- Figure 2C uses a highly schematic flowchart 100" to show the essential method steps of the control method according to a third variant of the method, which is used to synchronize various device components, i.e. the recording camera, its lens and the LED arrangement and the positioning carriage with the injection process of the injector to be tested .
- the positioning carriage 24 is also controlled in order to move the recording camera 12 mounted thereon together with the upstream lens 22 along the guide rail 25 independently of the set lens focal length to be able to
- an initializing method step 101" the positioning carriage is moved to an initial or starting position.
- a control pulse signal is transmitted synchronously to the electronics of the injector 15 to be tested, the LED arrangement 13, the recording camera 12, and their Lens 22 released so that the injector 15 ejects fuel from its spray holes and injects it into the measuring chamber 11; at the same time, the LED ring 13 emits a pulse of light, the lens 22 sets the aperture and focus, and the recording camera 12 opens its shutter for a predetermined exposure time so that light emitted by the LED ring 13 is at the phase boundary of the light emitted by the injector as Reflected spray pattern released fuel and from the measuring chamber 11 via the optical components 20, 21, and 22 on the image sensor of the recording camera 12 or is mapped.
- a control pulse signal is sent to the electronics of the injector 15, to the LED arrangement 13, to the recording camera 12 and to the lens, whereupon in an immediately following method step 105" an individual image is captured and in a further method step 106" it is stored as an image matrix in a storage medium will.
- a continuous query is made as to whether the preset temporal sequence of individual images of an image plane has already been processed, with a negative query result being followed by a return to step 104" and the procedure with steps 105" and 106" for acquisition and storage of a respective next frame within a loop comprising steps 104" to 107" is run through cyclically while incrementing a loop index by a counter 1, while on the other hand the loop is ended or .
- a continuous query is made as to whether the preset sequence of image planes has already been processed, with a negative query result being followed by a jump back to step 104" and the procedure with steps 105" and 106" for detecting and storing the next one in each case Frames of the next image plane and their time sequence is run through cyclically within a loop comprising steps 104" to 109", with the loop index for counting the frames being increased or incremented by a counter of 1, while on the other hand with a positive query result, i.e.
- the loop is terminated or exited in order in a subsequent method step 110" to initiate a jump to an evaluation method - to be explained below - since each time the loop 104" to 109" is run through the position of the positioning carriage by j each time a ⁇ x changes, the individual images of a sequence obtained in this embodiment of the control and measurement data acquisition method are mutually offset cross-sections which successively scan the spray pattern generated by the injector located in the measuring chamber, so that - in contrast to the first control method variant according to flow chart 100 - the spray pattern of the injector can be represented practically three-dimensionally by means of a single sequence.
- Figure 3A shows a flowchart with the essential method steps of the evaluation method 200 according to the invention according to a first specific embodiment, a respective injection rate of the injector being determined on the basis of spray patterns optically detected as cavitation images.
- Figure 3B shows an example of such a sensor image or cavitation image 30, which is digitally recorded by the image sensor of the recording device and has beam lobes 31, which are recognizable by image matrix elements or pixels with high light intensity values against a predominantly dark image background, the intensity distribution within which the beam lobes 31 rendered pixels comprises gray levels up to, for example, a maximum of 255 at an 8-bit depth.
- a first sensor image is analyzed from a sequence of recorded images detected one after the other in time, with the image matrix being read out element by element with regard to the light intensity information contained or scanned in each case.
- an intensity threshold value G is set in the first sensor image in order to define a light-dark boundary within the intensity profile of the first sensor image, which essentially serves to suppress background interference due to reflections on the inner wall of the measurement chamber.
- those image matrix elements P i of the first sensor image are recognized or identified whose assigned, stored light intensity information value reaches or exceeds the predetermined intensity threshold value.
- n(t) is the relative injection rate as a function of time t
- P j is the jth pixel or image matrix element of a respective beam image with m elements detected by the image sensor
- G in is between high and, in contrast, lower intensity values lying limit value
- j designates a summation index extending from 1 to m
- K j designates a respective correlation factor.
- the correlation factor takes into account a light intensity information value I(P j ,t) that is stored in the associated image matrix element and effects a normalization of the image matrix element contributions to n(t). Only those image matrix elements P j whose light intensity information values are greater than the limit value G or equal to the limit value G are taken into account in the summation.
- the determined n(t) for the first sensor image at time t is stored as a measure for the injection rate that corresponds to the optically detected cavitation image.
- a subsequent method step 206 increments an internal counter by 1 and triggers a jump back to method step 201 in order to analyze a next sensor image at time t+ ⁇ t with the aim of analyzing a relevant injection rate n(t+ ⁇ t) in the subsequent method steps 202 to 205 to determine. This procedure is repeated cyclically for the remaining sensor images of the sequence, so that finally there is an associated injection rate n(t) for each sensor image at a time t of a recording sequence.
- the respective injection rate n(t) is displayed for all analyzed sensor images and correlated with coincidentally recorded injection rates from hydraulic measured value acquisition based on the pressure p and the speed of sound c.
- FIG. 4A shows a flowchart 300 with the essential method steps of the evaluation method according to the invention according to a second embodiment, which essentially serves to determine the jet propagation speed through the cavitation.
- a light/dark intensity threshold is determined in those image matrix elements of the sensor image S i currently being processed, which correspond to the radially outwardly extending ends of the beam lobes of an identified cavitation pattern, the image matrix elements or pixels associated with this light-dark intensity threshold being arranged approximately along an imaginary circular ring with radius R i that runs radially in the sensor image.
- the subsequent method step 305 is used to calculate a real jet propagation radius r i in units of mm on the basis of the R i determined in the previous step 304 and calculated in units of the pixel distance, the imaging scale and the object size, which in the exemplary embodiment is the nozzle diameter of the injector to be tested can be to calculate or determine.
- the quotient v(t i+1 ) is a measure of the circular propagation of the light/dark intensity threshold—existing at the radially outward-pointing ends of the beam lobes of a cavitation—between two sensor images or recorded images that are recorded in immediate succession and represents it thus the jet propagation speed v in a cross-sectional plane, which is used to determine the corresponding jet pulse p, taking into account the simultaneously performed hydraulic measurement of the injection quantity; shows for illustration Figure 4B a projection 26 of two cavitation images captured in immediate succession, the radius of the light-dark intensity threshold relative to the ends of the beam lobes 31 being denoted by r 1 in the first cavitation image and by r 2 in the second cavitation image.
- a subsequent method step 309 the previously determined quotient is stored and displayed as a measure of the beam propagation speed v in a cross-sectional plane and the beam momentum p calculated therefrom in a cross-sectional plane.
- a subsequent intermediate step 310 serves to check the current counter reading and, in the event that not all sensor images of a sequence have been analyzed or evaluated, to execute a jump back to step 302; otherwise, in a concluding step 311, this method block 300 is stopped and a return is made to the higher-level control method.
- Figure 4C shows a flowchart 300 'with the essential method steps of the inventive evaluation method according to a third embodiment, which essentially serves to the beam propagation speed through the cavitation along the beam axis v s (t i ) in contrast to the evaluation method Figure 4A , which determines the beam propagation speed in an image plane.
- the radius R ij (in pixel spacing units) is determined using the image matrix elements of the sensor image S ij currently being processed, in order to use this to calculate a real beam propagation radius in the next method step 305". r ij in units of mm.
- the calculated beam propagation radius r ij is stored together with the associated recording time t i and the image plane position x j of the sensor image currently being processed as a value tuple (r ij , t i , x j ).
- a check is carried out in an intermediate step 307' to determine whether the counter j is greater than or equal to 2, with a negative result being followed by a return to step 303' in order to increase the counter reading for j by 1 to increment and process the next sensor image, again continuously executing steps 304' to 306', or otherwise proceed to the next method step 308'.
- step 312' the calculated beam propagation speed is then stored together with the beam propagation pulse p s calculated therefrom.
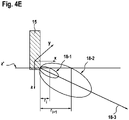
- Figure 4D illustrates a graphical scheme as a basis for calculation in method step 311 'according to Figure 4C subsequent determination of the jet propagation speed v s (t). It is shown in outline how a spray pattern emitted by an injector 15 spreads spatially along its jet axis 18-3 as a function of time, the spray pattern being in a first state 18-1 at a point in time t i and in a second state 18-2 is identified at a point in time t i+1 using the respective outer radii r i and r i+1 ; these outer radii of the spray pattern states 18-1, 18-2 are associated with various image planes z j+1 and z j+3 spaced apart from one another along the z axis of an x, y, z coordinate system.
- Figure 4E shows a scheme to illustrate the temporal divergence behavior of a spray pattern ejected from an injector 15, which - in contrast to that in Figure 4D shown scheme - as a basis for calculating the beam propagation speed to be determined in just a single image plane Figures 4A and 4B serves.
- the spray pattern propagating along its jet axis 18-3 is identified in a first state 18-1 at time t i and in a second state 18-2 at time t i+1 based on the respective outer radii r i and r i+1 , which result from their respective points of intersection with the image plane z' in an x, y, z coordinate system.
- FIG. 5A shows a cavitation image 30 optically recorded with the device 10 according to the invention, which, in addition to the symmetrically arranged beam lobes 31 in the central image area, which are recognizable from image matrix elements or pixels of the image sensor with high intensity values (shown light), has areas 33 at the image edges whose associated image matrix elements also contain high intensity values and are due to undesired reflections of the emitted light on the inner wall of the measuring chamber.
- each sensor image or cavitation image is assigned an evaluation mask 32 in order to leave out such image matrix elements in the evaluation, i.e. to limit the evaluation area in the image matrix of the respective cavitation image accordingly.
- a radial evaluation mask 32 is used between the ends of the beam lobes 31 facing away from the image center 34 and the edge regions of the digitally scanned or recorded cavitation image containing the reflections, the radius of which with respect to the image center 34 is greater than the radial extent of the beam lobes 31, but smaller than the radial position of the edge areas 33 is dimensioned so that the image matrix elements in the edge areas 33 of the image matrix are not taken into account in the evaluation according to equation (1) and consequently only the image matrix elements that lie within the radius of the evaluation mask 32 in the evaluation according to equation (1) are taken into account.
- Figure 5B shows a contrast modified evaluation mask 35, which - in contrast to that of Figure 5A - has a substantially star-shaped structure and is contoured in such a way that each contour element of the star-shaped structure is associated with a respective beam lobe 31, so that each individual beam lobe is closely framed, with the respective intermediate space being defined between respectively adjacent ones and the radial extent of each contour element larger than the position of the end of the respective beam lobe 31 as seen in the radial direction, but significantly smaller than the position of the edge regions 33 as seen in the radial direction.
- Figure 5C shows a modified evaluation mask 36, which - in contrast to the Figures 5A and 5B illustrated embodiments - has a structure to which only a single beam lobe 31 is selectively assigned in the cavitation image and frames the beam lobe 31 in such a way that the mask structure starts approximately at the origin of the beam lobe 31 and narrowly delimits the beam lobe at its outer edges up to its end, with the radial extent of the structure of the evaluation mask 36 is dimensioned slightly larger than the position of the end of the beam lobe 31 viewed in the radial direction.
- FIG. 6 shows a measurement diagram 40, in which measurement data 41 obtained optically and evaluated according to the method according to the invention as a measure for a normalized injection rate, each as a function of the time t running along the abscissa axis during an injection process and, for comparison, a hydraulically recorded and set to a maximum of 1 normalized injection rate are plotted using a solid measurement curve 42 .
- the optically recorded measurement data 41 and evaluated according to the method according to the invention according to the flowchart 200 are divided into groups that differ from each other with regard to the set intensity threshold value and in 6 are represented by different symbols, for a first group, in which the associated measurement data with a reference symbol are designated, only those pixels in the respective cavitation image with intensity values from a threshold of, for example, 150 in an 8-bit gray value depth ranging, for example, from 0 to 255 are taken into account in the count, for a second group in which the assigned measurement data are designated with the reference symbol 0 are, only those pixels with intensity values above a threshold of 220, and for a third group, in which the assigned measurement data are denoted by the reference symbol O, only those pixels with intensity values above a threshold of 250.
- All three groups of the optically recorded and evaluated measurement data 41 are as 6 shows close together and have an approximately bell-shaped distribution along the time axis t, the rising edge 44 of which corresponds to the beginning and the falling edge 44' to the end of the injection process.
- the injection rate recorded hydraulically at the same time is shown along the ordinate axis as a solid measurement curve 42, with the injection rate being determined essentially as a function of the time profile of the continuously measured pressure p(t) in the measuring chamber and the measured pressure-dependent sound velocity c(p).
- Both the measurement data obtained according to optical recognition or scanning and the measurement curve recorded hydraulically at the same time are normalized to a maximum of 1 with respect to the ordinate axis F(t) in order to enable a direct comparison.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
- Die Erfindung betrifft ein Verfahren zur Charakterisierung des Einspritzverhaltens eines Einspritzventils für Flüssigkeiten sowie eine Vorrichtung zur Durchführung eines derartigen Verfahrens.
- Zur Funktionsprüfung bzw. Charakterisierung von Einspritzventilen, insbesondere von Common-Rail-Injektoren, ist in der Regel eine genaue Messung von Kenngrößen wie z.B. der Einspritzrate bei Einzel- oder Mehrfacheinspritzungen erforderlich, um beispielsweise Spritzbeginn und Spritzende eines Einspritzvorgangs erkennen zu können. Dazu werden z.T. unterschiedliche Messtechniken eingesetzt, unter denen die Erfassung von primären Kenngrößen wie der Einspritzrate basierend auf der Messung von Druck und Schallgeschwindigkeit in einer Messkammer relativ häufig eingesetzt wird. Bei diesem Stand der Technik ist jedoch eine relativ aufwendige Drucksensorsignalkonditionierung mittels einer Tiefpassfilterung nötig, um Störsignaleinflüsse aufgrund von Eigenschwingungen der Messkammer zu kompensieren.
- Aus der
DE 10 2011 007 611 A1 sind eine Vorrichtung und ein Verfahren zur Ermittlung zumindest der Spritzmenge und/oder der Spritzrate einer mit einem Ventil verspritzten Flüssigkeit bekannt. Die Vorrichtung weist eine Messkammer und eine Schnittstelle zur Aufnahme des Ventils, zumindest einen Sensor zum Messen eines in der Messkammer herrschenden Zustandes, sowie eine mit dem Sensor verschaltete Auswerteeinrichtung zur Bestimmung der Spritzmenge und/oder der Spritzrate zumindest in Abhängigkeit von dem gemessenen Zustand auf. Die Vorrichtung sowie das Verfahren zur Ermittlung der Spritzmenge und/oder der Spritzrate ermöglichen es, gleichzeitig einen weiteren Parameter der Flüssigkeit zu ermitteln und zu bewerten. Dieser weitere Parameter ist das Strahlbild der verspritzten Flüssigkeit und wird von einer Einrichtung zur Strahlbilderfassung der verspritzten Flüssigkeit aufgenommen. Hierfür wird eine optisehe Kammer verwendet, wobei das Strahlbild simultan zu der Spritzmenge und/oder der Spritzrate von der Auswerteeinrichtung ermittelt und bewertet wird. -
FR 2 719 871 A1 DE 10 2015 217940 A1 , sowieJP 2001 050866 A - Das Verfahren mit den Merkmalen des Patentanspruchs 1 hat den Vorteil, dass es relativ einfach und kostengünstig realisierbar ist und zudem quantitative Resultate liefert. Dazu umfasst das Verfahren die Schritte des Einspritzens von Flüssigkeit durch das Einspritzventil in eine Messkammer, des Einstrahlens von Licht in die Messkammer auf von dem Einspritzventil als Sprühmuster ausgestoßene Flüssigkeit, des Detektierens und Abtastens von zeitlich aufeinanderfolgenden Strahlbildern, die von an Grenzflächen des vom Einspritzventil ausgestoßenen Sprühmusters reflektiertem und auf eine Aufnahmeeinrichtung abgebildetem Licht erzeugt werden, um ortsaufgelöste Intensitätsverteilungen zu erhalten, des Auswertens der zu den detektierten und abgetasteten Strahlbildern jeweils zugeordneten Intensitätsverteilungen, wobei in den jeweiligen Intensitätsverteilungen solche Bildmatrixelemente identifiziert werden, welche dem abgebildeten Sprühmuster zugeordnete Bildinformationen enthalten, und anhand der jeweils identifizierten Bildmatrixelemente bzw. Pixel und deren Zeitentwicklung ein Maß für das Einspritzverhalten ermittelt wird. Der Erfindung liegt mithin die Erkenntnis zugrunde, dass bei geeignetem Messkammerdruck an einer Phasengrenze zwischen einer einen Einspritzvorgang darstellenden Gasphase/Flüssigkeitsphase und einer in der Messkammer befindlichen Flüssigphase/Gasphase reflektiertes und dann als optische Momentaufnahme abgebildetes Licht einen zeitlich "eingefrorenen" Zustand des Einspritzverhaltens darstellt, da beim Einspritzvorgang in die mit dem flüssigen Medium gefüllte Messkammer eine sich als Sprühmuster manifestierende Kavitation auftritt, so dass Öffnen und Schließen des Einspritzventils eindeutig mit dem Auftreten und Verschwinden von Kavitation korreliert ist; die Auswertung von derart "eingefrorenen" Momentaufnahmen eines Kavitationsereignisses gibt somit Aufschluss über dessen zeitliche Entwicklung, woraus eine Kenngröße zur Charakterisierung des Einspritzverhaltens ableitbar ist. Mithin ist es möglich, Beginn und Ende eines Einspritzvorgangs aufgrund der dann auftretenden abrupten Änderungen der Intensitätsverteilungen der Strahlbilder eindeutig zu bestimmen. Das erfindungsgemäße Verfahren ist aufgrund der zugrundeliegenden optischen Messtechnik weitgehend unempfindlich gegenüber Eigenschwingungen der Messkammer. Weitere vorteilhafte Weiterbildungen und Ausgestaltungen der Erfindung ergeben sich durch die in den Unteransprüchen aufgeführten Maßnahmen.
- Die Erfindung besteht weiterhin darin, dass als Maß für das Einspritzverhalten eine als Kenngröße dienende relative Einspritzrate anhand der nachstehenden Beziehung
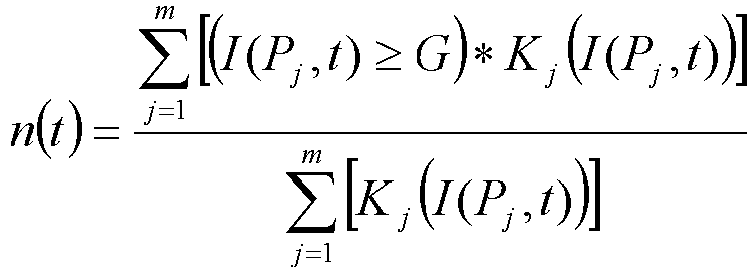
- Summationsindex, wobei m die Gesamtzahl der ausgewerteten Bildmatrixelemente darstellt und mit Kj ein jeweiliger Korrelationsfaktor bezeichnet sind, welcher einen im jeweils zugeordneten Bildmatrixelement erfassten Lichtintensitätsinformationswert I(Pj, t) berücksichtigt, wobei bei der Summenbildung nur solche Bildmatrixelemente Pj berücksichtigt werden, deren Lichtintensitätswerte größer als der Grenzwert G oder gleich dem Grenzwert G sind, um dem im jeweiligen Strahlbild enthaltenen Sprühmuster zugeordnete Bildmatrixelemente zu identifizieren.
- Zweckmäßigerweise wird die Aufnahmeeinrichtung so eingestellt, dass eine Querschnittebene des ausgestoßenen Sprühmusters als Strahlbild scharf abgebildet wird, wodurch ein zweidimensionales Abbild des Sprühmusters darstellbar ist.
- Eine Verfahrensvariante, mit welcher ein quasi dreidimensionales Abbild eines der optischen Detektion zugrundeliegenden Sprühmusters darstellbar ist, kann darin bestehen, dass in zeitlich aufeinanderfolgend erfassten Strahlbildern verschiedene Querschnittebenen abgebildet und abgetastet werden, wobei jeweils die Brennweite der Aufnahmeeinrichtung verändert wird und/oder die Aufnahmeeinrichtung hinsichtlich ihres optischen Abstands zur Messkammer verschoben wird.
- Eine Weiterbildung der Erfindung, mit welcher eine weitere Kenngröße zur Charakterisierung des Einspritzverhaltens optisch gewinnbar ist, kann darin bestehen, dass als Maß für das Einspritzverhalten eine Strahlausbreitungsgeschwindigkeit in einer Querschnittebene des Sprühmusters (Strahlbild) anhand der nachstehenden Beziehung

- Dabei erfolgt eine Kalibrierung der Strahlausbreitungsradien, indem eine abbildungsrelevante Gegenstandsgröße, vorzugsweise ein Düsendurchmesser des zu prüfenden Einspritzventils, und/oder ein Abbildungsmaßstab der Aufnahmeeinrichtung und/oder ein Auflösungsvermögen der Aufnahmeeinrichtung berücksichtigt wird/werden, so dass die Kenngröße in absoluten Einheiten darstellbar ist.
- Gemäß einer vorteilhaften Ausgestaltung der Erfindung werden simultan zum optischen Detektieren von Strahlbildern hydraulische Messungen zum Ermitteln einer hydraulisch gewonnenen Kenngröße wie die Einspritzrate und/oder die Einspritzmenge in der Messkammer durchgeführt, wobei optisch gewonnene Messdaten mit hydraulisch gewonnenen Messdaten bezüglich der Kenngröße korreliert werden. Dadurch sind die hydraulisch gewonnenen Messresultate unmittelbar mittels der zeitgleich durchgeführten optischen Erkennung überprüfbar und verifizierbar, so dass bei der hydraulischen Messwerterfassung aufgrund der dafür erforderlichen Tiefpassfilterung auftretende Messartefakte erkennbar sind. Weiterhin können aus der optisch ermittelten relativen Einspritzrate n(t) eine auf ein Maximum von 1 normierte Einspritzrate F(t) und durch Einbeziehung der hydraulischen Messresultate eine absolute Einspritzrate A(t) ermittelt werden, indem eine Skalierung über die hydraulisch gemessene Einspritzrate, welche dem Integral über der Rate entspricht, erfolgt.
- Bei dem kombinierten Einsatz von optischer und hydraulischer Messwerterfassung kann als weitere Kenngröße ein Strahlimpuls zur Charakterisierung des Einspritzverhaltens ermittelt werden, wobei der Strahlimpuls aus der optisch gewonnenen Strahlausbreitungsgeschwindigkeit v(ti) und aus einer hydraulisch gewonnenen Einspritzmenge durch jeweilige Produktbildung ermittelt wird. Zweckmäßigerweise kann aus den verschiedenen Querschnittebenen zu jedem Zeitpunkt der Einspritzung ein dreidimensionales Bild des Sprühmusters erzeugt werden. Ferner wird eine Strahlausbreitungsgeschwindigkeit entlang der Strahlachse aus dem dreidimensionalen Bild des Sprühmusters ermittelt.
- Die zur Durchführung des erfindungsgemäßen Verfahrens bestimmte Vorrichtung gemäß dem Gegenstand des Anspruchs 10 ist einfach konzipiert und liefert zuverlässig quantitative Resultate zur Charakterisierung des Einspritzverhaltens eines Einspritzventils bzw. Kraftstoffinjektors. Dazu ist vorgesehen, dass die Vorrichtung eine Auswerteeinrichtung umfasst, welche eine Datenübertragungsverbindung zur Aufnahmeeinrichtung aufweist, um von der Aufnahmeeinrichtung detektierte und abgetastete Strahlbilder zu verarbeiten und auszuwerten, wobei die Auswerteeinrichtung in von der Aufnahmeeinrichtung erfassten Intensitätsverteilungen von jeweiligen Strahlbildern solche Bildmatrixelemente identifiziert, welche einem abgebildeten Sprühmuster zugeordnete Bildinformationen enthalten, und anhand der jeweils identifizierten Bildmatrixelemente und deren Zeitentwicklung ein Maß für das Einspritzverhalten ermittelt.
- Gemäß einer Ausgestaltung der Erfindung ist die Aufnahmeeinrichtung entlang ihrer optischen Achse mittels einer zugeordneten Positioniereinrichtung verfahrbar ausgebildet, um die optische Weglänge zwischen der Aufnahmeeinrichtung und der Messkammer zu verändern. Dadurch ist es möglich, nacheinander verschiedene Querschnittebenen des vom Einspritzventil ausgestoßenen Sprühmusters optisch durchzufahren und zu erfassen, um mithin eine quasi dreidimensionale Darstellung zu erzielen. Zweckmäßigerweise ist die Aufnahmeeinrichtung als Digitalkamera ausgebildet, um für jedes detektierte und abgetastete Strahlbild jeweils einen ortsaufgelösten Intensitätsverlauf zu erfassen, was die Auswertung der optisch gewonnenen Daten vereinfacht und einen kompakten Aufbau der Vorrichtung ermöglicht.
- Ausführungsbeispiele der Erfindung sind in der nachfolgenden Beschreibung und in den beigefügten Zeichnungen näher erläutert. Letztere zeigen in schematisch gehaltenen Ansichten:
-
Fig. 1A eine Schnittansicht einer erfindungsgemäßen Vorrichtung, die eine Messkammer mit einem darin aufgenommenen Injektor, eine an einen optischen Zugang der Messkammer angeordnete Beleuchtungseinrichtung und eine außerhalb der Messkammer angeordnete Aufnahmeeinrichtung aufweist, -
Fig. 1B ein Schaubild, das für eine erste und eine darauf erfolgende zweite Einspritzung jeweils während der Einspritzdauer erfasste hydraulische Messungen anhand von zwei Diagrammen und zeitlich koinzidierend dazu optisch erfasste Kavitationsbilder zusammen mit einer Impulsfolge für die Einspritzung des zu testenden Injektors und einem Steuersignal zur Ansteuerung der Beleuchtungseinrichtung darstellt, wobei die Zeitachse entlang der Abszisse verläuft und in den Diagrammen die hydraulisch erfasste Einspritzmasse und deren zeitliche Ableitung als Funktion der Zeit aufgetragen sind, -
Fig. 2A ein Flussdiagramm mit den wesentlichen Verfahrensschritten einer ersten Ausführungsform des erfindungsgemäßen Steuerungsverfahrens, -
Fig. 2B ein Flussdiagramm mit den wesentlichen Verfahrensschritten einer zweiten Ausführungsform des erfindungsgemäßen Steuerungsverfahrens, -
Fig. 2C ein Flussdiagramm mit den wesentlichen Verfahrensschritten einer dritten Ausführungsform des erfindungsgemäßen Steuerungsverfahrens, -
Fig. 3A ein Flussdiagramm mit den wesentlichen Verfahrensschritten einer ersten Ausführungsform des erfindungsgemäßen Auswerteverfahrens, um ein Maß für eine relative Einspritzrate eines zu testenden Injektors zu ermitteln, -
Fig. 3B ein als Kavitationsbild optisch detektiertes Sprühmuster eines Injektors, das als Grundlage für die erste Ausführungsform des Auswerteverfahrens dient, -
Fig. 4A ein Flussdiagramm mit den wesentlichen Verfahrensschritten einer zweiten Ausführungsform des erfindungsgemäßen Auswerteverfahrens, um ein Maß für die Strahlausbreitung in einer Bildebene eines von einem zu testenden Injektor ausgestoßenen Sprühmusters zu ermitteln, -
Fig. 4B eine Projektion von zwei zeitlich unmittelbar aufeinanderfolgend detektierten Kavitationsbildern als Grundlage für die zweite Ausführungsform des Auswerteverfahrens, -
Fig. 4C ein Flussdiagramm mit den wesentlichen Verfahrensschritten einer dritten Ausführungsform des erfindungsgemäßen Auswerteverfahrens, um ein Maß für die Strahlausbreitung entlang der Strahlachse eines von einem zu testenden Injektor ausgestoßenen Sprühmusters zu ermitteln, -
Fig. 4D ein Schema zur groben Veranschaulichung des prinzipiellen zeitlichen Divergenzverhaltens eines vom Injektor ausgestoßenen Sprühmusters, das anhand seines zu verschiedenen Zeitpunkten jeweils zugeordneten Außenradius vereinfachend und skizzenhaft dargestellt ist, als Berechnungsgrundlage für die zu ermittelnde Strahlausbreitungsgeschwindigkeit, -
Fig. 4E ein Schema zur Veranschaulichung des prinzipiellen zeitlichen Divergenzverhaltens eines vom Injektor ausgestoßenen Sprühmusters als Berechnungsgrundlage für die zu ermittelnde Strahlausbreitungsgeschwindigkeit in einer einzigen Bildebene, -
Fig. 5A eine anhand eines Kavitationsbilds veranschaulichte Auswertemaske zur Auswertung, um unerwünschte Reflexionen an der Messkammerwand bei der Auswertung zu unterdrücken, -
Fig. 5B eine anhand eines Kavitationsbilds veranschaulichte Auswertemaske, die bei der Auswertung eingesetzt wird, um strahlfremde Reflexionsanteile zu unterdrücken, -
Fig. 5C eine anhand eines Kavitationsbilds veranschaulichte Auswertemaske, die zur Auswertung eingesetzt wird, um selektiv einzelne Strahlkeulen im Kavitationsbild zu analysieren, sowie -
Fig. 6 ein gemäß dem erfindungsgemäßen Verfahren erfasstes und ausgewertetes Messdiagramm, bei dem entlang der Ordinate eine normierte Einspritzrate F(t) aufgetragen ist, während entlang der Abszisse die Zeitachse verläuft, wobei Gruppen von optisch erfassten Messdaten dargestellt sind, indem der Anteil heller Bildmatrixelemente einzelner Sensorbilder einer zeitlichen Sequenz in funktionaler Abhängigkeit von der Aufnahmezeit der Aufnahmeeinrichtung während eines Einspritzvorgangs dargestellt sind, und im Vergleich dazu eine gleichzeitig hydraulisch erfasste Messkurve dargestellt ist. -
Fig. 1A veranschaulicht in einer stark schematisch gehaltenen Schnittansicht die im Ganzen mit 10 bezeichnete Vorrichtung, welche eine Messkammer 11 und eine optische Aufnahmeeinrichtung 12 sowie eine Beleuchtungseinrichtung 13 aufweist. Die Messkammer 11 dient zum Prüfen von Injektoren und weist ein Gehäuse 14 auf, das zur Aufnahme eines zu prüfenden Injektors 15 vorgesehen ist, welcher mittig in einer dafür vorgesehenen Öffnung in einer oben angeordneten Wandung des Gehäuses 14 eingesetzt ist, so dass das mit Spritzlöchern versehene Injektorende in die Messkammer 11 hineinragt. - In dem Gehäuse 14 sind ein Drucksensor 16 und eine Ultraschallwandlereinrichtung 17 aufgenommen, welche aus einer Ultraschallquelle und einem Ultraschallsensor gebildet ist. Dadurch weist die Messkammer 11 eine Funktionalität als hydraulischer Druckanstiegsanalysator auf; wenn der Injektor 15 durch seine Einspritzöffnungen bzw. Spritzlöcher Flüssigkeit in die mit Flüssigkeit gefüllte Messkammer 11 einspritzt und dadurch der Druck in der Messkammer 11 ansteigt, kann in herkömmlicher Weise durch gleichzeitige Messung des Drucks und der Schallgeschwindigkeit in der Messkammer 11 mittels des Drucksensors 16 und der Ultraschallwandlereinrichtung 17 eine charakteristische Kenngröße des Injektors, nämlich die Einspritzrate, ermittelt werden.
- Indem die Beleuchtungseinrichtung 13 und die optische Aufnahmeeinrichtung 12 mit der Messkammer 11 zusammenwirken, weist die Vorrichtung 10 eine optische Sensorfunktionalität auf, um das beim Einspritzvorgang an den Spritzlöchern des Injektors 15 als Querschnittebene des Sprühmusters 18 durch den dort austretenden Kraftstoff erzeugte Strahlbild 30 optisch zu detektieren und mittels einer nicht dargestellten Auswerteeinrichtung quantitativ zu analysieren. Dazu weist das Gehäuse 14 auf seiner dem Injektor 15 gegenüberliegend angeordneten Bodenseite 14' einen etwa mittig darin aufgenommenen optischen Zugang 20 auf, der als optisch transparentes Fenster ausgebildet ist. Die Beleuchtungseinrichtung 13 ist als ringförmige Leuchtdiodenanordnung (LED-Anordnung) ausgebildet und außenseitig derart an der Bodenseite 14' des Gehäuses 14 angeordnet, dass die Ringinnenfläche der LED-Anordnung 13 einen aus der Bodenseite 14' herausragenden Abschnitt des optischen Fensters 20 umschließt. Von der ringförmigen LED-Anordnung 13 abgestrahltes Licht gelangt dann über das optische Fenster 20 in die Messkammer 11. Um unerwünschte Reflexionen des in die Messkammer abgestrahlten Lichts an der Innenwandung der Messkammer 11 weitestgehend zu unterdrücken, ist die Innenwandung der Messkammer 11 geschwärzt ausgebildet, so dass in die Messkammer 11 eingestrahltes Licht im Wesentlichen an Phasengrenzen reflektiert wird, welche durch Kavitation während des Einspritzvorgangs aus den Spritzlöchern des zu prüfenden Injektors 15 in Form von Strahlkeulen entstehen und ein Sprühmuster 18 bilden. Zumindest ein Teil des daran zurückgeworfenen bzw. reflektierten Lichts tritt durch das optische Fenster 20 und durch den Innenring der LED-Anordnung 13 hindurch nach außen und wird dann über einen Umlenkspiegel 21 um 90° umgelenkt, um von einer Aufnahmeeinrichtung 12 als Strahlbild bzw. Kavitationsbild 30 detektiert zu werden, wobei ein vorgeordnetes Objektiv 22 das vom Umlenkspiegel 21 her einfallende Lichtstrahlenbündel auf einen Bildsensor (nicht dargestellt) der Aufnahmeeinrichtung 12 abbildet, welche im Ausführungsbeispiel als Hochgeschwindigkeits-Digitalkamera mit einem CMOS- bzw. CCD-("charge coupled device")-Array als Bildsensor ausgebildet ist. Zweckmäßigerweise sind dabei die ringförmige LED-Anordnung 13, das optische Fenster 20 und der Injektor 15 konzentrisch zueinander entlang der Längsachse 11' der Messkammer 11 angeordnet. Die Aufnahmeeinrichtung 12 ist zusammen mit dem vorgeordneten Objektiv 22 auf einem Positionierschlitten 24 befestigt, der entlang einer Führung 25 horizontal verschiebbar ausgebildet ist, um die Bildebene der Aufnahmeeinrichtung 12 unabhängig von deren Fokuseinstellung variieren zu können. Eine Steuer- und Auswerteeinrichtung (nicht dargestellt) dient einerseits zum Ansteuern des Positionierschlittens 24, zur Steuerung des Einspritzverhaltens des Injektors 15, zur gepulsten Steuerung der Lichtemission der LED-Anordnung und zum darauf zeitlich abgestimmten Aufnahmeverhalten der Aufnahmeeinrichtung 12 und andererseits zur Auswertung der vom Bildsensor der Aufnahmeeinrichtung 12 detektierten Lichtintensitäten; dazu ist die Steuer- und Auswerteeinrichtung über Steuer- und Datenleitungen (nicht dargestellt) mit einer Steuerelektronik des Injektors, mit der LED-Anordnung, mit der Aufnahmekamera und deren Objektiv und einer Steuerelektronik des Positionierschlittens elektrisch verbunden. Außerdem führt die Steuer- und Auswerteeinrichtung eine Korrelation der optisch gewonnenen Daten mit den dazu simultan aus der Druck- und Schallgeschwindigkeitsmessung hydraulisch gewonnenen Daten durch.
-
Fig. 1B zeigt ein Schaubild 27, in welchem mit der erfindungsgemäßen Vorrichtung 10 erzielte Messungen dargestellt sind, die einerseits hydraulisch erfasste Messungen in zwei Diagrammen 28, 28' für zwei zeitlich aufeinanderfolgende Einspritzungen des zu testenden Injektors und jeweils zeitlich dazu korrelierte und optisch erfasste Kavitationsbilder 30', 30" umfassen. In den beiden Diagrammen 28, 28' sind die anhand des in der Messkammer laufend gemessenen Drucks p und der gemessenen Schallgeschwindigkeit c ermittelte Einspritzmasse m und die Einspritzrate dm/dt als Funktion der Zeit t während einer Mehrfacheinspritzung bestehend aus beispielsweise dargestellter Vor-, Haupt- und Nacheinspritzung dargestellt. Jedem der beiden Diagramme 28, 28' ist eine Steuerimpulsfolge zugeordnet, mit welcher die Einspritzung des Injektors steuerbar ist, indem für die Voreinspritzung beispielsweise ein dreieckförmiger Sägezahnimpuls 29, für die Haupteinspritzung ein trapezförmiger Impuls 29' und für die Nacheinspritzung ein trapezförmiger Impuls 29" von gegenüber der Haupteinspritzung kürzerer Impulsdauer verwendet wird. Ferner ist zu jedem der beiden Diagramme 28, 28' ein Steuersignal 39 zur Ansteuerung der Leuchtdioden der Beleuchtungseinrichtung dargestellt, mit dem eine synchron zur Einspritzung erfolgende Beleuchtung der Messkammer bewirkt wird, wobei das Steuersignal eine im Wesentlichen rechteckförmige Impulsform aufweist, deren Impulslänge so bemessen ist, das diese sich über die Vor-, Haupt- und Nacheinspritzung erstreckt. WieFig. 1B weiterhin veranschaulicht, ist ein Kavitationsereignis desto ausgeprägter, je höher die Einspritzrate dm/dt ist, denn das zeitgleich mit einer Voreinspritzung aufgezeichnete Kavitationsbild 30' ist deutlich schwächer ausgeprägt als das während einer Haupteinspritzung bei hoher Einspritzrate aufgezeichnete Kavitationsbild 30", dessen in radialer Richtung verlaufende Strahlkeulen demgegenüber eine deutlich längere Reichweite aufweisen. -
Fig. 2A zeigt anhand eines stark schematisch gehaltenen Flussdiagramms 100 die wesentlichen Verfahrensschritte des erfindungsgemäßen Steuerungsverfahrens gemäß einer ersten Verfahrensvariante, die dazu dient, verschiedene Vorrichtungskomponenten, d.h. die Aufnahmekamera, deren Objektiv und die LED-Anordnung mit dem Einspritzvorgang des zu testenden Injektors zu synchronisieren. In einem ersten Verfahrensschritt 101 wird ein Steuerimpuls synchron an die Elektronik des Injektors 15, die LED-Anordnung 13, die Aufnahmekamera 12, das Objektiv 22 übermittelt, so dass der Injektor 15 Kraftstoff aus seinen Spritzlöchern ausstößt und in die Messkammer 11 injiziert; gleichzeitig emittiert der LED-Ring 13 einen Lichtimpuls, stellt das Objektiv 22 Blende und Fokus ein und öffnet die Aufnahmekamera 12 für eine vorbestimmte Belichtungszeit ihren Verschluss, damit Licht, das von dem LED-Ring 13 emittiert, an der Phasengrenze des von dem Injektor als Sprühmuster 18 ausgestoßenen Kraftstoffs reflektiert wird, aus der Messkammer 11 über das optische Fenster 20, den Umlenkspiegel 21 und das Objektiv 22 auf den Bildsensor der Aufnahmekamera 12 gelangt bzw. abgebildet wird. In einem zweiten Verfahrensschritt 102, welcher noch während der Belichtungsphase erfolgt, wird die Bildebene des Objektivs 11 auf die Ebene der Spritzlöcher des Injektors 15 scharfgestellt, um das beim Einspritzvorgang des Injektors typischerweise erzeugte Sprühmuster bzw. Kavitationsbild scharf auf den Bildsensor abzubilden. Nach diesen beiden Justageschritten 101 und 102 wird, um eine Sequenz von zeitlich aufeinanderfolgenden Einzelbildern zu starten, in einem daran anschließenden Verfahrensschritt 103 erneut ein Steuerimpuls an die Elektronik des Injektors 15, die LED-Anordnung 13 und an die Aufnahmekamera 12 abgegeben, worauf in einem folgenden Verfahrensschritt 104 ein erstes Einzelbild erfasst wird. In einem nächsten Verfahrenschritt 105 wird das unmittelbar zuvor aktuell erfasste Einzelbild als Bildmatrix mit Bildmatrixelementen bzw. Pixel, in denen die jeweiligen Lichtintensitäten erfasst sind, auf einem Speichermedium abgespeichert. In einem daran anschließenden Prüfschritt 106 wird laufend abgefragt, ob die voreingestellte Sequenz von Einzelbildern schon abgearbeitet ist, wobei bei negativem Abfrageresultat ein Rücksprung zu Schritt 103 erfolgt und die Prozedur mit den Schritten 104 und 105 zum Erfassen und Abspeichern eines jeweils nächsten Einzelbilds innerhalb einer Schritte 103 bis 106 umfassenden Schleife, unter Inkrementierung eines Schleifenindex um einen Zähler 1 zyklisch durchlaufen wird, während demgegenüber bei positivem Abfrageresultat, d.h. wenn eine Sequenz von Einzelbildern erfasst und abgespeichert ist, die Schleife beendet bzw. verlassen wird, um in einem anschließenden Verfahrensschritt 107 einen Sprung in ein Auswerteverfahren einzuleiten. Die bei dieser Ausführungsform des Steuer- und Messdatenerfassungsverfahrens gewonnenen Einzelbilder sind aufgrund der optischen Vorrichtungskonfiguration Querschnitte durch die vom Injektor erzeugte Kavitation entlang der am Objektiv 22 konstant eingestellten Bildebene. -
Fig. 2B zeigt anhand eines stark schematisch gehaltenen Flussdiagramms 100' die wesentlichen Verfahrensschritte des erfindungsgemäßen Steuerungsverfahrens gemäß einer zweiten Verfahrensvariante, die dazu dient, verschiedene Vorrichtungskomponenten, d.h. die Aufnahmekamera, deren Objektiv und die LED-Anordnung und den Positionierschlitten mit dem Einspritzvorgang des zu testenden Injektors zu synchronisieren. Im Unterschied zur ersten Ausführungsform des Steuer- und Messdatenerfassungsverfahrens 100 wird bei der zweiten Ausführungsform des Steuerverfahrens 100' zusätzlich noch der Positionierschlitten 24 angesteuert, um die darauf befestigte Aufnahmekamera 12 zusammen mit vorgeordnetem Objektiv 22 unabhängig von der eingestellten Objektivbrennweite entlang der Führungsschiene 25 verfahren zu können. In einem initialisierenden Verfahrensschritt 101' wird der Positionierschlitten in eine Anfangs- bzw. Startposition gefahren. Daraufhin wird in einem nächsten Verfahrensschritt 102' ein Steuerimpulssignal synchron an die Elektronik des zu testenden Injektors 15, die LED-Anordnung 13, die Aufnahmekamera 12, und deren Objektiv 22 abgegeben, so dass der Injektor 15 Kraftstoff aus seinen Spritzlöchern ausstößt und in die Messkammer 11 injiziert; gleichzeitig emittiert der LED-Ring 13 einen Lichtimpuls, stellt das Objektiv 22 Blende und Fokus ein und öffnet die Aufnahmekamera 12 für eine vorbestimmte Belichtungszeit ihren Verschluss, damit Licht, das von dem LED-Ring 13 emittiert, an der Phasengrenze des von dem Injektor als Sprühmuster 18 freigesetzten Kraftstoffs reflektiert und aus der Messkammer 11 über die optischen Komponenten 20, 21, und 22 auf den Bildsensor der Aufnahmekamera 12 gelangt bzw. abgebildet wird. In einem noch während der Belichtungsphase erfolgenden Verfahrensschritt 103' wird die Bildebene des Objektivs 22 auf die Ebene der Spritzlöcher des Injektors 15 scharfgestellt, um das beim Einspritzvorgang des Injektors typischerweise erzeugte Sprühmuster als Kavitationsbild scharf auf den Bildsensor abzubilden. Nach diesen Justageschritten 101', 102' und 103' wird, um eine Sequenz von zeitlich aufeinanderfolgenden Einzelbildern zu starten, in einem daran anschließenden Verfahrensschritt 104' ein Steuerimpulssignal an die Elektronik des Injektors 15, an die LED-Anordnung 13, an die Aufnahmekamera 12 und an das Objektiv abgegeben, worauf in einem unmittelbar folgenden Verfahrensschritt 105' ein Einzelbild erfasst und in einem weiteren Verfahrensschritt 106' als Bildmatrix in einem Speichermedium abgespeichert wird. Nach dem Abspeichern 106' wird in einem daran anschließenden Verfahrensschritt 107' ein Steuerimpulssignal an die Positioniereinrichtung bzw. den Positionierschlitten abgegeben, um den bei Schritt 101' auf eine Startposition x0 eingestellten Positionierschlitten um einen Vorschub Δx zu einer neuen Position x:= x0 + Δx zu verfahren; dadurch ändert sich die Bildebene um Δx. In einem daran anschließenden Prüfschritt 108' wird laufend abgefragt, ob die voreingestellte Sequenz schon abgearbeitet ist, wobei bei negativem Abfrageresultat ein Rücksprung zu Schritt 104' erfolgt und die Prozedur mit den Schritten 105' und 106' zum Erfassen und Abspeichern eines jeweils nächsten Einzelbilds innerhalb einer Schritte 104' bis 108' umfassenden Schleife zyklisch durchlaufen wird, wobei der Schleifenindex zum Zählen der Einzelbilder um jeweils einen Zähler von 1 erhöht bzw. inkrementiert wird, während demgegenüber bei positivem Abfrageresultat, d.h. wenn die Sequenz von Einzelbildern erfasst und abgespeichert ist, die Schleife beendet bzw. verlassen wird, um in einem anschließenden Verfahrensschritt 109' einen Sprung in ein - nachstehend noch zu erläuterndes - Auswerteverfahren einzuleiten. Da sich bei jedem Durchlauf der Schleife 104' bis 108' die Position des Positionierschlittens um jeweils ein Δx ändert, sind die bei dieser Ausführungsform des Steuer- und Messdatenerfassungsverfahrens gewonnenen Einzelbilder einer Sequenz zueinander versetzte Querschnitte, welche das vom jeweils vom in der Messkammer befindlichen Injektor erzeugte Sprühmuster sukzessive abrastern, so dass - im Unterschied zu der ersten Steuerungsverfahrensvariante gemäß Flussdiagramm 100 - mittels einer einzigen Sequenz das Sprühmuster des Injektors praktisch dreidimensional zu einer Zeit darstellbar ist. -
Fig. 2C zeigt anhand eines stark schematisch gehaltenen Flussdiagramms 100" die wesentlichen Verfahrensschritte des erfindungsgemäßen Steuerungsverfahrens gemäß einer dritten Verfahrensvariante, die dazu dient, verschiedene Vorrichtungskomponenten, d.h. die Aufnahmekamera, deren Objektiv und die LED-Anordnung und den Positionierschlitten mit dem Einspritzvorgang des zu testenden Injektors zu synchronisieren. Im Unterschied zu der ersten Ausführungsform des Steuer- und Messdatenerfassungsverfahrens 100 wird bei der dritten Ausführungsform des Steuerverfahrens 100" zusätzlich noch der Positionierschlitten 24 angesteuert, um die darauf befestigte Aufnahmekamera 12 zusammen mit vorgeordnetem Objektiv 22 unabhängig von der eingestellten Objektivbrennweite entlang der Führungsschiene 25 verfahren zu können. In einem initialisierenden Verfahrensschritt 101" wird der Positionierschlitten in eine Anfangs- bzw. Startposition gefahren. Daraufhin wird in einem nächsten Verfahrensschritt 102" ein Steuerimpulssignal synchron an die Elektronik des zu testenden Injektors 15, die LED-Anordnung 13, die Aufnahmekamera 12, und deren Objektiv 22 abgegeben, so dass der Injektor 15 Kraftstoff aus seinen Spritzlöchern ausstößt und in die Messkammer 11 injiziert; gleichzeitig emittiert der LED-Ring 13 einen Lichtimpuls, stellt das Objektiv 22 Blende und Fokus ein und öffnet die Aufnahmekamera 12 für eine vorbestimmte Belichtungszeit ihren Verschluss, damit Licht, das von dem LED-Ring 13 emittiert, an der Phasengrenze des von dem Injektor als Sprühmuster freigesetzten Kraftstoffs reflektiert und aus der Messkammer 11 über die optischen Komponenten 20, 21, und 22 auf den Bildsensor der Aufnahmekamera 12 gelangt bzw. abgebildet wird. In einem noch während der Belichtungsphase erfolgenden Verfahrensschritt 103" wird die Bildebene des Objektivs 22 auf die Ebene der Spritzlöcher des Injektors 15 scharfgestellt, um das beim Einspritzvorgang des Injektors typischerweise erzeugte Sprühmuster als Kavitationsbild scharf auf den Bildsensor abzubilden. Nach diesen Justageschritten 101", 102" und 103" wird, um eine Sequenz von zeitlich aufeinanderfolgenden Einzelbildern zu starten, in einem daran anschließenden Verfahrensschritt 104" ein Steuerimpulssignal an die Elektronik des Injektors 15, an die LED-Anordnung 13, an die Aufnahmekamera 12 und an das Objektiv abgegeben, worauf in einem unmittelbar folgenden Verfahrensschritt 105" ein Einzelbild erfasst und in einem weiteren Verfahrensschritt 106" als Bildmatrix in einem Speichermedium abgespeichert wird. In einem daran anschließenden Prüfschritt 107" wird laufend abgefragt, ob die voreingestellte zeitliche Sequenz von Einzelbildern einer Bildebene schon abgearbeitet ist, wobei bei negativem Abfrageresultat ein Rücksprung zu Schritt 104" erfolgt und die Prozedur mit den Schritten 105" und 106" zum Erfassen und Abspeichern eines jeweils nächsten Einzelbilds innerhalb einer Schritte 104" bis 107" umfassenden Schleife unter Inkrementierung eines Schleifenindex um einen Zähler 1 zyklisch durchlaufen wird, während demgegenüber bei positivem Abfrageresultat, d.h. wenn eine zeitliche Sequenz von Einzelbildern einer Bildebene erfasst und abgespeichert ist, die Schleife beendet bzw. verlassen wird, um in einem anschließenden Verfahrensschritt 108" ein Steuerimpulssignal an die Positioniereinrichtung bzw. den Positionierschlitten abzugeben, um den bei Schritt 101" auf eine Startposition x0 eingestellten Positionierschlitten um einen Vorschub Δx zu einer neuen Position x:= x0 + Δx zu verfahren; dadurch ändert sich die Bildebene um Δx. In einem daran anschließenden Prüfschritt 109" wird laufend abgefragt, ob die voreingestellte Sequenz von Bildebenen schon abgearbeitet ist, wobei bei negativem Abfrageresultat ein Rücksprung zu Schritt 104" erfolgt und die Prozedur mit den Schritten 105" und 106" zum Erfassen und Abspeichern eines jeweils nächsten Einzelbilds der nächsten Bildebene sowie deren zeitliche Sequenz innerhalb einer Schritte 104" bis 109" umfassenden Schleife zyklisch durchlaufen wird, wobei der Schleifenindex zum Zählen der Einzelbilder um jeweils einen Zähler von 1 erhöht bzw. inkrementiert wird, während demgegenüber bei positivem Abfrageresultat, d.h. wenn die Sequenz von Einzelbildern aller Bildebenen erfasst und abgespeichert ist, die Schleife beendet bzw. verlassen wird, um in einem anschließenden Verfahrensschritt 110" einen Sprung in ein - nachstehend noch zu erläuterndes - Auswerteverfahren einzuleiten. Da sich bei jedem Durchlauf der Schleife 104" bis 109" die Position des Positionierschlittens um jeweils ein Δx ändert, sind die bei dieser Ausführungsform des Steuer- und Messdatenerfassungsverfahrens gewonnenen Einzelbilder einer Sequenz zueinander versetzte Querschnitte, welche das vom jeweils in der Messkammer befindlichen Injektor erzeugte Sprühmuster sukzessive abrastern, so dass - im Unterschied zu der ersten Steuerungsverfahrensvariante gemäß Flussdiagramm 100 - mittels einer einzigen Sequenz das Sprühmuster des Injektors praktisch dreidimensional darstellbar ist. -
Fig. 3A zeigt ein Flussdiagramm mit den wesentlichen Verfahrensschritten des erfindungsgemäßen Auswerteverfahrens 200 gemäß einer ersten Ausführungsform, wobei auf der Grundlage von als Kavitationsbilder optisch detektierten Sprühmustern eine jeweilige Einspritzrate des Injektors ermittelt wird.Fig. 3B zeigt exemplarisch ein derartiges Sensorbild bzw. Kavitationsbild 30, das von dem Bildsensor der Aufnahmeeinrichtung digital erfasst ist und Strahlkeulen 31 aufweist, die anhand von Bildmatrixelementen bzw. Pixeln mit hohen Lichtintensitätswerten gegenüber einem überwiegend dunklen Bildhintergrund kenntlich sind, wobei die Intensitätsverteilung innerhalb der die Strahlkeulen 31 wiedergebenden Pixel Graustufen bis beispielsweise maximal 255 bei einer 8-Bit-Tiefe umfasst. In einem ersten Verfahrensschritt 201 wird ein erstes Sensorbild aus einer Sequenz von zeitlich aufeinanderfolgend detektierten Aufnahmebildern analysiert, wobei die Bildmatrix elementweise im Hinblick auf die jeweils enthaltene bzw. abgetastete Lichtintensitätsinformation ausgelesen wird. In einem daran anschließenden Verfahrensschritt 202 wird in dem ersten Sensorbild ein Intensitätsschwellwert G festgesetzt, um eine Hell-Dunkel-Grenze innerhalb des Intensitätsverlaufs des ersten Sensorbilds festzulegen, die im Wesentlichen dazu dient, einen auf Reflexionen an der Messkammerinnenwand zurückzuführenden Störuntergrund zu unterdrücken. In einem darauf folgenden Verfahrensschritt 203 erfolgt ein Erkennen bzw. Identifizieren von denjenigen Bildmatrixelementen Pi des ersten Sensorbilds, deren zugeordnet abgespeicherter Lichtintensitätsinformationswert den vorbestimmten Intensitätsschwellwert erreicht oder überschreitet. Der sich unmittelbar daran anschließende Verfahrensschritt 204 dient zum Ermitteln einer relativen Einspritzrate einer definierten Anzahl m der zuvor erkannten Bildmatrixelemente bzw. Pixel Pi im ersten Sensorbild gemäß der nachstehend aufgeführten Gleichung: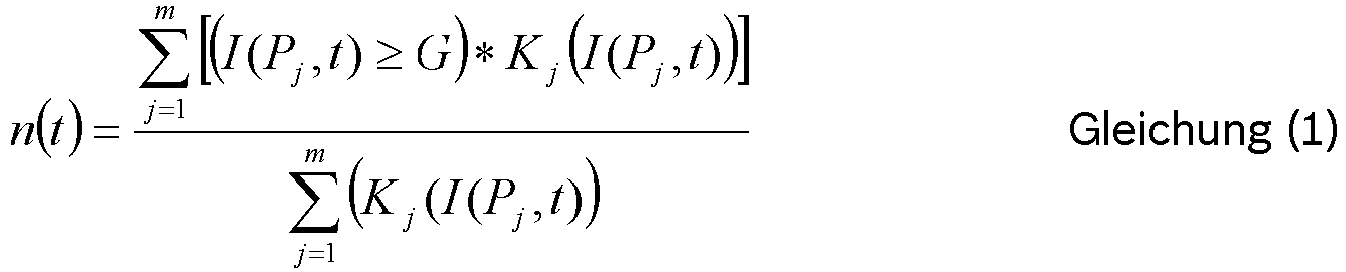
- Dabei sind mit n(t) die relative Einspritzrate in funktionaler Abhängigkeit von der Zeit t, mit Pj das j-te Pixel bzw. Bildmatrixelement eines jeweiligen von dem Bildsensor erfassten Strahlbilds mit m-Elementen, mit G ein zwischen hohen und demgegenüber niedrigeren Intensitätswerten liegender Grenzwert, mit j ein sich von 1 bis m erstreckender Summationsindex und mit Kj ein jeweiliger Korrelationsfaktor bezeichnet. Der Korrelationsfaktor berücksichtigt einen im jeweils zugeordneten Bildmatrixelement gespeichert erfassten Lichtintensitätsinformationswert I(Pj, t) und bewirkt eine Normierung der Bildmatrixelementbeiträge zu n(t). In der Summenbildung werden nur solche Bildmatrixelemente Pj berücksichtigt, deren Lichtintensitätsinformationswerte größer als der Grenzwert G oder gleich dem Grenzwert G sind. In einem weiteren Verfahrensschritt 205 erfolgt ein Speichern des ermittelten n(t) für das erste Sensorbild zur Zeit t als Maß für die mit dem optisch detektierten Kavitationsbild korrespondierende Einspritzrate. Ein darauf erfolgender Verfahrensschritt 206 inkrementiert einen internen Zähler um 1 und löst einen Rücksprung zu Verfahrenschritt 201 aus, um ein nächstes Sensorbild zur Zeit t+Δt mit dem Ziel zu analysieren, eine diesbezügliche Einspritzrate n(t+Δt) in den sich daran anschließenden Verfahrensschritten 202 bis 205 zu ermitteln. Dieses Procedere wiederholt sich zyklisch für die übrigen Sensorbilder der Sequenz, so dass schließlich zu jedem Sensorbild zu einer Zeit t einer Aufnahmesequenz eine jeweils zugeordnete Einspritzrate n(t) vorliegt. In einem abschließenden Verfahrensschritt 207 wird die jeweilige Einspritzrate n(t) für alle analysierten Sensorbilder dargestellt und mit dazu jeweils zeitlich koinzidierend erfassten Einspritzraten aus hydraulischer Messwerterfassung anhand des Drucks p und der Schallgeschwindigkeit c korreliert.
-
Fig. 4A zeigt ein Flussdiagramm 300 mit den wesentlichen Verfahrensschritten des erfindungsgemäßen Auswerteverfahrens gemäß einer zweiten Ausführungsform, was im Wesentlichen dazu dient, die Strahlausbreitungsgeschwindigkeit durch die Kavitation zu bestimmen. Dabei wird in einem Initialisierungsschritt 301 ein interner Zähler i auf Null gesetzt, worauf in einem weiteren Verfahrensschritt 302 der Zähler i um 1, d.h. i:= i +1 inkrementiert wird, um in einem daran anschließenden Verfahrensschritt 303 ein erstes indiziertes Sensorbild S1 aus einer Sequenz bzw. Folge von m erfassten Sensorbildern S1, S2, ..., Si, ... ,Sm zu bearbeiten bzw. auszuwerten. In einem darauf folgenden Verfahrensschritt 304 wird eine Hell/Dunkel-Intensitätsschwelle in denjenigen Bildmatrixelementen des aktuell in Bearbeitung befindlichen Sensorbilds Si ermittelt, welche mit den sich radial nach außen wegerstreckenden Enden der Strahlkeulen eines identifizierten Kavitationsmusters korrespondieren, wobei die mit dieser Hell-Dunkel-Intensitätsschwelle assoziierten Bildmatrixelemente bzw. Pixel etwa entlang eines gedachten - radial im Sensorbild verlaufenden - Kreisrings mit Radius Ri angeordnet sind. Der daran anschließende Verfahrensschritt 305 dient dazu, einen realen Strahlausbreitungsradius ri in Einheiten von mm auf der Basis des im vorherigen Schritt 304 ermittelten und in Einheiten des Pixelabstands berechneten Ri, des Abbildungsmaßstabs und der Objektgröße, welche im Ausführungsbeispiel der Düsendurchmesser des zu prüfenden Injektors sein kann, zu errechnen bzw. bestimmen. In einem weiteren Verfahrensschritt 306 wird der so errechnete Strahlausbreitungsradius ri mit dem zugeordneten Aufnahmezeitpunkt ti des aktuellen Sensorbilds i als Wertepaar abgespeichert. Da zum Durchführen eines weiteren Auswerteschritts wenigstens zwei zeitlich aufeinanderfolgende Sensorbilder zu analysieren sind, erfolgt zunächst in einem Zwischenschritt 307 eine Prüfung, ob der Zähler i größer oder gleich 2 ist, wobei bei einem Zählerstand von i:= 1 ein Rücksprung zu Schritt 302 erfolgt, um den Zählerstand zu inkrementieren und das nächste Sensorbild in Bearbeitung zu nehmen und sodann die Schritte 304 bis 306 durchzuführen, oder andernfalls zum nächsten Verfahrensschritt 308 überzugehen. Denn in dem Verfahrensschritt 308 wird aus der Auswertung von zwei zeitlich aufeinanderfolgenden Sensorbildern Si+1 und Si für die dafür jeweils ermittelten Wertepaare ein Quotient v gebildet gemäß der nachstehenden Gleichung:
- Dabei sind mit v(ti+1) der Quotient, mit ri der für ein jeweiliges Sensorbild ermittelte Strahlradius und mit ti der jeweilige Aufnahmezeitpunkt eines Sensorbilds bezeichnet, während ri+1 der für ein zeitlich nachfolgend zum Zeitpunkt ti+1 aufgezeichnetes Sensorbild ermittelte Strahlausbreitungsradius darstellt; somit ist Gleichung (2) aus v = Δr/Δt abgeleitet. Der Quotient v(ti+1) ist ein Maß für die zirkulare Ausbreitung der - jeweils an den radial nach außen wegweisenden Enden der Strahlkeulen einer Kavitation existierenden - Hell/Dunkel-Intensitätsschwelle zwischen jeweils zwei zeitlich unmittelbar aufeinanderfolgend erfassten Sensorbildern bzw. Aufnahmebildern und repräsentiert somit die Strahlausbreitungsgeschwindigkeit v in einer Querschnittebene, welche zum Ermitteln des entsprechenden Strahlimpulses p unter Berücksichtigung der simultan durchgeführten hydraulischen Messung der Einspritzmenge dient; zur Veranschaulichung zeigt
Fig. 4B eine Projektion 26 von zwei zeitlich unmittelbar aufeinanderfolgend erfassten Kavitationsbildern, wobei der Radius der Hell-Dunkel-Intensitätsschwelle bezüglich der Enden der Strahlkeulen 31 bei dem ersten Kavitationsbild mit r1 und bei dem zweiten Kavitationsbild mit r2 bezeichnet ist. In einem daran anschließenden Verfahrensschritt 309 wird der zuvor jeweils ermittelte Quotient als Maß für die Strahlausbreitungsgeschwindigkeit v in einer Querschnittebene und der daraus berechnete Strahlimpuls p in einer Querschnittebene abgespeichert und dargestellt. Ein anschließender Zwischenschritt 310 dient dazu, den aktuellen Zählerstand zu überprüfen und für den Fall, dass noch nicht alle Sensorbilder einer Sequenz analysiert bzw. ausgewertet sind, einen Rücksprung zu Schritt 302 auszuführen; andernfalls erfolgt in einem abschließenden Schritt 311 ein Stopp dieses Verfahrensblocks 300 und ein Rücksprung in das übergeordnete Steuerverfahren. -
Fig. 4C zeigt ein Flussdiagramm 300' mit den wesentlichen Verfahrensschritten des erfindungsgemäßen Auswerteverfahrens gemäß einer dritten Ausführungsform, was im Wesentlichen dazu dient, die Strahlausbreitungsgeschwindigkeit durch die Kavitation entlang der Strahlachse vs(ti) im Gegensatz zu dem Auswerteverfahren gemäßFig. 4A , das die Strahlausbreitungsgeschwindigkeit in einer Bildebene ermittelt, zu bestimmen. Dazu werden in einem Initialisierungsschritt 301' ein interner Zähler i und ein interner Zähler j jeweils auf Null gesetzt, d.h. i:=0 und j:=0, wobei der Zähler i als zeitlicher Index dazu dient, Einzelbildaufnahmen bzw. Sensorbilder S für eine bestimmte Bildebene in zeitlicher Hinsicht zu indizieren, während der Zähler j als Index zur räumlichen Indizierung der Einzelbildaufnahmen S dient, also eine Position bzw. Lage einer jeweiligen Bildebene von entsprechenden Einzelbildaufnahmen indiziert. Im Anschluss daran wird in Verfahrenschritten 302' und 303' zunächst der Zähler i um 1, d.h. i:=i+1, und dann der Zähler j um 1, d.h. j:=j+1, inkrementiert, um daraufhin in einem weiteren Verfahrensschritt 304' ein entsprechend indiziertes Sensorbild Sij aus der Menge erfasster und abgespeicherter Sensorbilder herauszuselektieren und zu bearbeiten bzw. auszuwerten. Gemäß einem sich unmittelbar daran anschließenden Verfahrensschritt 305' wird anhand der Bildmatrixelemente des aktuell in Bearbeitung genommenen Sensorbilds Sij der Radius Rij (in Pixelabstandseinheiten) ermittelt, um im nächsten Verfahrensschritt 305" daraus einen realen Strahlausbreitungsradius rij in Einheiten von mm zu berechnen. In einem weiteren Verfahrensschritt 306' wird der errechnete Strahlausbreitungsradius rij zusammen mit dem zugeordneten Aufnahmezeitpunkt ti und der Bildebenenposition xj des aktuell in Bearbeitung befindlichen Sensorbilds als Werte-Tupel (rij, ti, xj) abgespeichert. Um wenigstens zwei Sensorbilder analysieren bzw. miteinander vergleichen zu können, erfolgt in einem Zwischenschritt 307' eine Prüfung, ob der Zähler j größer oder gleich 2 ist, wobei bei negativem Resultat ein Rücksprung zu Schritt 303' erfolgt, um den Zählerstand für j um 1 zu inkrementieren und das nächste Sensorbild zu bearbeiten, wobei die Schritte 304' bis 306' erneut durchlaufend ausgeführt werden, oder andernfalls zum nächsten Verfahrensschritt 308' überzugehen. Dieser Verfahrensschritt 308' dient als Prüfschritt dazu, eine Abfrage durchzuführen, ob bei zwei einander zur Analyse zugeordneten Sensorbildern für die entsprechenden Strahlausbreitungsradien rij und ri,j-1 die Ungleichung rij ≥ ri,j-1 erfüllt ist, um die Bildebene mit maximalem Radius zum Aufnahmezeitpunkt ti zu finden; bei negativem Abfrageresultat erfolgt ein Rücksprung zu Schritt 306' zum Abspeichern eines Werte-Tupels (rij, ti, xj), während bei positivem Abfrageresultat ein Übergang zum nächsten Schritt 309' erfolgt, wo der Zähler j auf Null gesetzt wird, d.h. j:=0, worauf in einem nächsten Schritt 310' eine Abfrage für paarweise zu analysierende Sensorbilder durchgeführt wird, ob der Zähler i größer oder gleich 2 ist. Bei negativem Abfrageresultat erfolgt ein Rücksprung zu Schritt 302', wo eine Zählerinkrementierung für i durchgeführt wird, also i:=i+1, während bei positivem Abfrageresultat ein Übergang zu Schritt 311' erfolgt, in welchem die Strahlausbreitungsgeschwindigkeit vs(ti) entlang der Strahlachse berechnet wird, wie nachfolgend noch erläutert werden wird. In einem daran anschließenden Schritt 312' wird dann die berechnete Strahlausbreitungsgeschwindigkeit zusammen mit dem daraus errechneten Strahlausbreitungsimpuls ps abgespeichert. In einem weiteren Schritt 313' erfolgt eine Abfrage, ob eine Sequenz fertiggestellt bzw. abgearbeitet ist, d.h. der aktuelle Zählerstand i der Dimension m der abgespeicherten Sensorbilder entspricht; bei negativem Abfrageresultat erfolgt ein Rücksprung zu Schritt 302' mit Inkrementierung des Zählers i um 1, also i:=i+1, während bei positivem Abfrageresultat ein Übergang zum letzten Schritt 314' erfolgt, in welchem ein Rücksprung zum übergeordneten Steuerungsverfahren erfolgt. -
Fig. 4D veranschaulicht ein graphisches Schema als Berechnungsgrundlage für die in Verfahrensschritt 311' gemäßFig. 4C erfolgende Bestimmung der Strahlausbreitungsgeschwindigkeit vs(t). Dabei ist skizzenhaft dargestellt, wie ein von einem Injektor 15 ausgestoßenes Sprühmuster sich abhängig von der Zeit entlang seiner Strahlachse 18-3 räumlich ausbreitet, wobei das Sprühmuster in einem ersten Zustand 18-1 zu einem Zeitpunkt ti und in einem zweiten Zustand 18-2 zu einem Zeitpunkt ti+1 anhand der jeweiligen Außenradien ri und ri+1 kenntlich gemacht ist; diesen Außenradien der Sprühmuster-Zustände 18-1, 18-2 sind verschiedene entlang der z-Achse eines x, y, z-Koordinatensystems voneinander beabstandete Bildebenen zj+1 und zj+3 zugeordnet. Dazu ist für das graphisch dargestellte Ausführungsbeispiel ein rechtwinkliges Dreieck 18-4 im Koordinatensystem zwischen den beiden Zuständen 18-1, 18-2 entlang der Strahlachse 18-3 konstruierbar, in welchen für die beiden Katheten die Beziehungen

- Für die Hypotenuse gilt dann:

- Dadurch ergibt sich für die Strahlausbreitungsgeschwindigkeit vs(ti+1) durch Einsetzen von Gl. 3 bis 5 in die Basisformel vs(ti+1) = ds/dt mit dt= ti+1 - ti eine entsprechende Auswertegleichung für vs(t i+1), die für das Ausführungsbeispiel als Funktion f(zi+3, zi+1, ri+1, ri, ti+1, ti) darstellbar ist.
-
Fig. 4E zeigt ein Schema zur Veranschaulichung des zeitlichen Divergenzverhaltens eines von einem Injektor 15 ausgestoßenen Sprühmusters, welches - im Unterschied zu dem inFig. 4D dargestellten Schema - als Berechnungsgrundlage für die zu ermittelnde Strahlausbreitungsgeschwindigkeit in lediglich einer einzigen Bildebene gemäßFig. 4A und 4B dient. Dabei ist das sich entlang seiner Strahlachse 18-3 ausbreitende Sprühmuster in einem ersten Zustand 18-1 zum Zeitpunkt ti und einem zweiten Zustand 18-2 zum Zeitpunkt ti+1 anhand der jeweiligen Außenradien ri und ri+1 kenntlich gemacht, welche sich durch ihre jeweiligen Schnittpunkte mit der Bildebene z' in einem x, y, z-Koordinatensystem ergeben. Dadurch ergibt sich für die Berechnung der Wegdifferenz dr zwischen den beiden Zuständen 18-1 und 18-2 die Beziehung dr = ri+1 - ri, wobei die Zeitdifferenz dt = ti+1 - ti ist; für die Berechnung von v(ti+1) gilt mithin die Beziehung v(ti+1) = dr/dt. -
Fig. 5A zeigt ein mit der erfindungsgemäßen Vorrichtung 10 optisch erfasstes Kavitationsbild 30, das neben den im zentralen Bildbereich symmetrisch angeordneten Strahlkeulen 31, die anhand von Bildmatrixelementen bzw. Pixeln des Bildsensors mit hohen Intensitätswerten (hell dargestellt) kenntlich sind, an den Bildrändern Bereiche 33 aufweist, deren zugeordnete Bildmatrixelemente ebenfalls hohe Intensitätswerte enthalten und auf unerwünschte Reflexionen des abgestrahlten Lichts an der Innenwand der Messkammer zurückzuführen sind. Um innerhalb des erfindungsgemäßen Auswerteverfahrens den Einfluss derartiger Reflexionen zu reduzieren, wird jedem Sensorbild bzw. Kavitationsbild eine Auswertemaske 32 zugeordnet, um solche Bildmatrixelemente bei der Auswertung auszusparen, also den Auswertebereich in der Bildmatrix des jeweiligen Kavitationsbilds entsprechend einzuschränken. Dazu wird gemäß der inFig. 5A dargestellten Variante zwischen den dem Bildzentrum 34 abgewandten Enden der Strahlkeulen 31 und den die Reflexionen enthaltenden Randbereichen des digital abgetasteten bzw. erfassten Kavitationsbilds eine radial verlaufende Auswertemaske 32 eingesetzt, deren Radius bezüglich des Bildzentrums 34 größer als die radiale Erstreckung der Strahlkeulen 31, jedoch kleiner als die radiale Lage der Randbereiche 33 bemessen ist, so dass die Bildmatrixelemente in den Randbereichen 33 der Bildmatrix bei der Auswertung gemäß Gleichung (1) außer Betracht bleiben und mithin lediglich die Bildmatrixelemente, die innerhalb des Radius der Auswertemaske 32 liegen, bei der Auswertung gemäß Gleichung (1) berücksichtigt werden. -
Fig. 5B zeigt eine demgegenüber abgewandelte Auswertemaske 35, die - im Unterschied zu jener vonFig. 5A - eine im Wesentlichen sternförmige Struktur aufweist und so konturiert ist, dass jedem Konturenelement der sternförmigen Struktur jeweils einer Strahlkeule 31 zugeordnet ist, so dass jede einzelne Strahlkeule eng eingerahmt ist, wobei der jeweilige Zwischenraum zwischen jeweils zueinander benachbarten abgegrenzt ist und die radiale Erstreckung jedes Konturenelements größer als die in radialer Richtung gesehene Lage des Endes der jeweiligen Strahlkeule 31, jedoch deutlich kleiner als die in radialer Richtung gesehene Lage der Randbereiche 33 bemessen ist. Dadurch bleiben bei der Auswertung nach Gleichung (1) Bildmatrixelemente von Bildbereichen außer Betracht, welche zwischen den jeweils benachbarten Strahlkeulen 31 und zwischen den Enden der Strahlkeulen und den Bildrändern 33 liegen, was bei der Auswertung eine Hervorhebung von strahlrelevanten Bildanteilen gegenüber dem Bildhintergrund bewirkt. -
Fig. 5C zeigt eine abermals abgewandelte Auswertemaske 36, welche - im Unterschied zu den inFig. 5A und 5B dargestellten Ausführungsformen - eine Struktur aufweist, der selektiv nur eine einzige Strahlkeule 31 im Kavitationsbild zugeordnet ist und die Strahlkeule 31 so einrahmt, dass die Maskenstruktur etwa von Ursprung der Strahlkeule 31 ausgeht und die Strahlkeule an ihren Außenrändern bis hin zu ihrem Ende eng eingrenzt, wobei die radiale Erstreckung der Struktur der Auswertemaske 36 geringfügig größer als die in radialer Richtung gesehene Lage des Endes der Strahlkeule 31 bemessen ist. Dadurch bleiben bei der Auswertung gemäß Gleichung (1) Bildmatrixelemente von Bildbereichen außer Betracht, die deutlich außerhalb jener Bildmatrixelemente liegen, welche die Intensitätsverteilung der einzelnen Strahlkeulen 31 wiedergeben. Aufgrund der selektiven Anwendung einer derartigen Maskenstruktur auf einzelne Strahlkeulen 31 eines Kavitationsbildes sind Asymmetrieeffekte, also Abweichungen der Intensitätsverteilungen der einzelnen Strahlkeulen 31 zueinander quantitativ analysierbar und bewertbar, um im Hinblick auf die zugeordneten Spritzlöcher z.B. Fertigungstoleranzen beurteilen und/oder Fertigungsfehler lokalisieren zu können. -
Fig. 6 zeigt ein Messdiagramm 40, bei dem optisch gewonnene und nach dem erfindungsgemäßen Verfahren ausgewertete Messdaten 41 als Maß für eine normierte Einspritzrate jeweils in funktionaler Abhängigkeit von der entlang der Abszissenachse verlaufenden Zeit t während eines Einspritzvorgangs und zum Vergleich dazu eine hydraulisch erfasste und auf ein Maximum von 1 normierte Einspritzrate anhand einer durchgezogenen Messkurve 42 aufgetragen sind. Die optisch erfassten und gemäß dem erfindungsgemäßen Verfahren nach dem Ablaufdiagramm 200 ausgewerteten Messdaten 41 sind in Gruppen unterteilt, die sich jeweils voneinander bezüglich des eingestellten Intensitätsschwellwerts unterscheiden und inFig. 6 durch unterschiedliche Symbole dargestellt sind, wobei für eine erste Gruppe, bei der die zugeordneten Messdaten mit Bezugssymbolbezeichnet sind, nur solche Pixel im jeweiligen Kavitationsbild mit Intensitätswerten ab einer Schwelle von beispielsweise 150 in einer beispielsweise von 0 bis 255 reichenden 8-Bit-Grauwerttiefe in der Zählung berücksichtigt sind, für eine zweite Gruppe, bei der die zugeordneten Messdaten mit Bezugssymbol 0 bezeichnet sind, nur solche Pixel mit Intensitätswerten ab einer Schwelle von 220, und für eine dritte Gruppe, bei der die zugeordneten Messdaten mit Bezugssymbol O bezeichnet sind, nur solche Pixel mit Intensitätswerten ab einer Schwelle von 250. Alle drei Gruppen der optisch erfassten und ausgewerteten Messdaten 41 liegen, wie
Fig. 6 zeigt, dicht beieinander und weisen entlang der Zeitachse t eine etwa glockenförmige Verteilung auf, deren ansteigende Flanke 44 mit dem Beginn und deren abfallende Flanke 44' mit dem Ende des Einspritzvorgangs korrespondiert. Die simultan dazu hydraulisch erfasste Einspritzrate ist entlang der Ordinatenachse als durchgezogene Messkurve 42 dargestellt, wobei die Einspritzrate im Wesentlichen als Funktion des zeitlichen Verlaufs des laufend gemessenen Drucks p(t) in der Messkammer und der gemessenen druckabhängigen Schallgeschwindigkeit c(p) ermittelt wird. Sowohl die gemäß optischer Erkennung bzw. Abtastung gewonnenen Messdaten als auch die zeitgleich hydraulisch erfasste Messkurve sind bezüglich der Ordinatenachse F(t) normiert auf ein Maximum von 1, um einen direkten Vergleich zu ermöglichen. Weiterhin zeigtFig. 6 eine wesentliche Übereinstimmung zwischen dem zeitlichen Verlauf der optisch gewonnenen Messdaten 41 und dem Verlauf der hydraulisch gewonnenen Messkurve 42. Auch der Einspritzbeginn und das Einspritzende ist - in annähernd zeitlicher Übereinstimmung mit der simultan erfolgten hydraulischen Messung - eindeutig anhand der ansteigenden Flanke 44 und der abfallenden Flanke 44' bestimmbar. Die höhere Flankensteilheit bei der optischen Erkennung bzw. Abtastung im Unterschied zur hydraulischen Messung ist darauf zurückzuführen, dass bei der hydraulischen Messung ein Tiefpassfilter in der Messelektronikeinheit eingesetzt wird, der zum Ausfiltern von Eigenschwingungen in der Messkammer dient und als Nebeneffekt einerseits für einen deutlich flacheren Verlauf im Flankenbereich der durchgezogenen Messkurve und andererseits für Messwertstreuungen bzw. Messartefakte im zwischen den beiden Flanken 44, 44' liegenden Plateaubereich 45 sorgt.
Claims (12)
- Verfahren zur Charakterisierung des Einspritzverhaltens eines Einspritzventils für Flüssigkeiten mit folgenden Verfahrensschritten:- Einspritzen von Flüssigkeit durch das Einspritzventil (15) in eine Messkammer (11),- Einstrahlen von Licht in die Messkammer (11) auf von dem Einspritzventil (15) als Sprühmuster (18) ausgestoßene Flüssigkeit,- Detektieren und Abtasten von zeitlich aufeinanderfolgenden Strahlbildern, die von an Phasengrenzen des vom Einspritzventil (15) ausgestoßenen Sprühmusters (18) reflektiertem und auf eine Aufnahmeeinrichtung (12, 22) abgebildetem Licht erzeugt werden, um ortsaufgelöste Intensitätsverteilungen zu erhalten,- Auswerten der zu den detektierten und abgetasteten Strahlbildern (30) jeweils zugeordneten Intensitätsverteilungen, wobei in den jeweiligen Intensitätsverteilungen solche Bildmatrixelemente identifiziert werden, welche dem abgebildeten Sprühmuster (18) zugeordnete Bildinformationen enthalten, und anhand der jeweils identifizierten Bildmatrixelemente und deren Zeitentwicklung ein Maß für das Einspritzverhalten ermittelt wird, dadurch gekennzeichnet, dass als Maß für das Einspritzverhalten eine als Kenngröße dienende relative Einspritzrate anhand der nachstehenden Beziehung

- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Aufnahmeeinrichtung (12, 22) so eingestellt wird, dass eine Querschnittebene des ausgestoßenen Sprühmusters (18) als Strahlbild (30) scharf abgebildet wird.
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass in zeitlich aufeinanderfolgend erfassten Strahlbildern verschiedene Querschnittebenen abgebildet und abgetastet werden, wobei jeweils die Brennweite der Aufnahmeeinrichtung (12, 22) verändert wird und/oder die Aufnahmeeinrichtung (12, 22) hinsichtlich ihres optischen Abstands zur Messkammer (11) verschoben wird.
- Verfahren nach Anspruch 3, dadurch gekennzeichnet, dass aus den verschiedenen Querschnittebenen zu jedem Zeitpunkt der Einspritzung ein dreidimensionales Bild des Sprühmusters erzeugt werden kann.
- Verfahren nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass als Maß für das Einspritzverhalten eine Strahlausbreitungsgeschwindigkeit in einer Querschnittebene anhand der nachstehenden Beziehung

- Verfahren nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass eine Strahlausbreitungsgeschwindigkeit entlang der Strahlachse aus dem dreidimensionalen Bild des Sprühmusters ermittelt wird.
- Verfahren nach Anspruch 5, dadurch gekennzeichnet, dass eine Kalibrierung der Strahlausbreitungsradien erfolgt, indem eine abbildungsrelevante Gegenstandsgröße, vorzugsweise ein Düsendurchmesser des zu prüfenden Einspritzventils, und/oder ein Abbildungsmaßstab der Aufnahmeeinrichtung (12, 22) und/oder ein Auflösungsvermögen der Aufnahmeeinrichtung (12, 22) berücksichtigt wird/werden.
- Verfahren nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass simultan zum optischen Detektieren von Strahlbildern hydraulische Messungen zum Ermitteln einer hydraulisch gewonnenen Kenngröße in der Messkammer (11) durchgeführt werden, wobei optisch gewonnene Messdaten mit hydraulisch gewonnenen Messdaten bezüglich der Kenngröße korreliert werden.
- Verfahren nach Anspruch 8, soweit rückbezogen auf Anspruch 5, 6 oder 7, dadurch gekennzeichnet, dass als weitere Kenngröße ein Strahlimpuls ermittelt wird, wobei der Strahlimpuls aus der optisch gewonnenen Strahlausbreitungsgeschwindigkeit in einer Querschnittebene v(ti+1) oder entlang der Strahlachse und aus einer hydraulisch gewonnenen Einspritzmenge durch jeweilige Produktbildung ermittelt wird.
- Vorrichtung zur Durchführung des Verfahrens nach einem der Ansprüche 1 bis 9 mit einer Messkammer, einer Beleuchtungseinrichtung zum Einstrahlen von Licht über einen optischen Zugang in die Messkammer, einer Aufnahmeeinrichtung zum Detektieren von aus der Messkammer über den optischen Zugang zurückkommendem Licht und einer Auswerteeinrichtung, wobei die Auswerteeinrichtung eine Datenübertragungsverbindung zur Aufnahmeeinrichtung (12, 22) aufweist, um von der Aufnahmeeinrichtung (12, 22) detektierte und abgetastete Strahlbilder zu verarbeiten und auszuwerten, wobei die Auswerteeinrichtung in von der Aufnahmeeinrichtung (12, 22) erfassten Intensitätsverteilungen von jeweiligen Strahlbildern solche Bildmatrixelemente identifiziert, welche einem abgebildeten Sprühmuster (18) zugeordnete Bildinformationen enthalten, und anhand der jeweils identifizierten Bildmatrixelemente und deren Zeitentwicklung ein Maß für das Einspritzverhalten ermittelt, dadurch gekennzeichnet, dass als Maß für das Einspritzverhalten eine als Kenngröße dienende relative Einspritzrate anhand der nachstehenden Beziehung

- Vorrichtung nach Anspruch 10, dadurch gekennzeichnet, dass die Aufnahmeeinrichtung (12, 22) entlang ihrer optischen Achse mittels einer zugeordneten Positioniereinrichtung (24, 25) verfahrbar ausgebildet ist, um die optische Weglänge zwischen der Aufnahmeeinrichtung (12, 22) und der Messkammer (11) zu verändern.
- Vorrichtung nach Anspruch 10 oder 11, dadurch gekennzeichnet, dass die Aufnahmeeinrichtung (12, 22) als Digitalkamera ausgebildet ist, um für jedes detektierte und abgetastete Strahlbild jeweils einen ortsaufgelösten Intensitätsverlauf zu erfassen.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017222234.4A DE102017222234A1 (de) | 2017-12-08 | 2017-12-08 | Verfahren und Vorrichtung zur Charakterisierung des Einspritzverhaltens eines Einspritzventils für Flüssigkeiten |
| PCT/EP2018/078014 WO2019110169A1 (de) | 2017-12-08 | 2018-10-15 | Verfahren und vorrichtung zur charakterisierung des einspritzverhaltens eines einspritzventils für flüssigkeiten |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3721071A1 EP3721071A1 (de) | 2020-10-14 |
| EP3721071B1 true EP3721071B1 (de) | 2022-12-28 |
Family
ID=63896132
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18789061.1A Active EP3721071B1 (de) | 2017-12-08 | 2018-10-15 | Verfahren und vorrichtung zur charakterisierung des einspritzverhaltens eines einspritzventils für flüssigkeiten |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP3721071B1 (de) |
| JP (1) | JP2021505812A (de) |
| CN (1) | CN111465763B (de) |
| DE (1) | DE102017222234A1 (de) |
| WO (1) | WO2019110169A1 (de) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201913476D0 (en) * | 2019-09-18 | 2019-10-30 | Univ Birmingham | Traumatic brain injury detection |
| CN110985256B (zh) * | 2019-12-19 | 2021-05-14 | 哈尔滨工程大学 | 一种定容弹反射镜端盖及应用该端盖的多孔喷油器喷雾测试系统 |
| CN113530737B (zh) * | 2021-08-17 | 2022-06-03 | 安徽江淮汽车集团股份有限公司 | 发动机喷油器性能综合测试方法 |
| CN118462903B (zh) * | 2024-05-10 | 2024-11-15 | 东莞市首磁五金制品有限公司 | 基于数据驱动的阀芯变形量检测方法及系统 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2719871A1 (fr) * | 1994-05-13 | 1995-11-17 | Bertin & Cie | Dispositif de test d'injecteurs pour moteurs à combustion interne. |
| DE19917583C1 (de) * | 1999-04-19 | 2000-07-06 | Siemens Ag | Vorrichtung und Verfahren zum Bestimmen des Spritzbildes einer Kraftstoffeinspritzdüse |
| JP4013236B2 (ja) * | 1999-08-06 | 2007-11-28 | 株式会社デンソー | 噴霧検査装置及び噴霧検査方法 |
| US8154711B1 (en) * | 2004-10-01 | 2012-04-10 | Ingo Werner Scheer | Spray diagnostic and control method and system |
| DE102011007611B4 (de) | 2011-04-18 | 2022-01-27 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Ermittlung zumindest einer Spritzmenge und/oder einer Spritzrate einer mit einem Ventil verspritzten Flüssigkeit |
| DE102014212392A1 (de) * | 2014-06-27 | 2015-12-31 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Charakterisierung eines Injektors |
| DE102015217940B4 (de) * | 2015-09-18 | 2025-05-08 | Robert Bosch Gmbh | Prüfvorrichtung für einen Gasinjektor |
| CN105909444A (zh) * | 2016-05-09 | 2016-08-31 | 江苏科技大学 | 一种基于三维piv的船用柴油机喷雾场测量系统及测量方法 |
-
2017
- 2017-12-08 DE DE102017222234.4A patent/DE102017222234A1/de not_active Withdrawn
-
2018
- 2018-10-15 WO PCT/EP2018/078014 patent/WO2019110169A1/de not_active Ceased
- 2018-10-15 JP JP2020531109A patent/JP2021505812A/ja active Pending
- 2018-10-15 EP EP18789061.1A patent/EP3721071B1/de active Active
- 2018-10-15 CN CN201880079192.6A patent/CN111465763B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3721071A1 (de) | 2020-10-14 |
| DE102017222234A1 (de) | 2019-06-13 |
| CN111465763A (zh) | 2020-07-28 |
| JP2021505812A (ja) | 2021-02-18 |
| CN111465763B (zh) | 2022-05-13 |
| WO2019110169A1 (de) | 2019-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3721071B1 (de) | Verfahren und vorrichtung zur charakterisierung des einspritzverhaltens eines einspritzventils für flüssigkeiten | |
| DE19722790B4 (de) | Anordnung und Verfahren zur zeitaufgelösten Messung nach dem Scannerprinzip | |
| DE2227436C3 (de) | Vorrichtung zur Erfassung des Profils eines Werkstückes | |
| DE3441038C2 (de) | ||
| DE102016221049A1 (de) | Vorrichtung und Verfahren zum Empfangen eines reflektierten Lichtpulses in einem Lidar-System | |
| DE3007233A1 (de) | Verfahren und vorrichtung zum bestimmen der koerperlichen eigentuemlichkeit einer objektoberflaeche | |
| DE102007033809B4 (de) | Laserzündanlage | |
| EP1953504A1 (de) | Verfahren zur Erfassung eines Gegenstands und optoelektronische Vorrichtung | |
| DE112020006938T5 (de) | Kamera-mehrzeilen-zeitteilungs-belichtungsverarbeitungsverfahren und -system | |
| DE102008051513A1 (de) | Oberflächenmessgerät mit zwei Messeinheiten | |
| DE2226172C3 (de) | Verfahren zur Messung und Auswertung von Ultraschall-Prütimpulsen einer gewählten Impulsfolgefrequenz bei der Ultraschallprüfung von Blechen und ähnlichen Prüflingen nach dem Impuls-Echo-Verfahren | |
| DE102010017604B4 (de) | Verfahren zum optischen Messen von Strukturen eines Objekts | |
| DE3117073C2 (de) | Einrichtung zur Feststellung des Lidschlages eines Auges | |
| DE102020207272A1 (de) | Verfahren und Vorrichtung zur Sicherstellung eines Eindeutigkeitsbereichs eines Lidar-Sensors und einen solchen Lidar-Sensor | |
| DE69422245T2 (de) | Verfahren und Gerät zur Analyse von Teilchendurchflussbildern | |
| DE102011101384A1 (de) | Verfahren zur Bestimmung der zeitlichen und/oder räumlichen Partikelgrößenverteilung in einem Fluidvolumen | |
| EP1892495A2 (de) | Vorrichtung und Verfahren zur elektronischen Trefferauswertung | |
| DE102015217940B4 (de) | Prüfvorrichtung für einen Gasinjektor | |
| DE102004011169B4 (de) | Verfahren und Vorrichtung zum Erfassen eines Strahlbildes eines Fluidstrahls | |
| DE102008026657A1 (de) | Verfahren und Vorrichtung zur bildgebenden Darstellung von akustischen Objekten | |
| DE102015116474A1 (de) | Verfahren zum Ermitteln von Deskriptoren, welche mit Eigenschaften eines Partikelkollektivs korrelieren | |
| WO2018224068A1 (de) | Mess-sonde für strahlabtastung | |
| DE10032162C1 (de) | Verfahren und Vorrichtung zur Richtungserkennung von gepulsten Laserstrahlen nach dem Zeitintervallmeßprinzip | |
| EP3614172B1 (de) | Verfahren und vorrichtung zur optischen distanzmessung | |
| DE102021209296B4 (de) | Verfahren zum Bestimmen der Bewegung eines mit wenigstens einer Videokamera zur Bilderfassung ausgestatteten Objekts |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200708 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20221013 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502018011331 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1540637 Country of ref document: AT Kind code of ref document: T Effective date: 20230115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230328 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20221228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230428 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230428 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502018011331 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20230929 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20231031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20231015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231031 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1540637 Country of ref document: AT Kind code of ref document: T Effective date: 20231015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231015 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20241218 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20181015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20181015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221228 |