EP3848588A1 - Vakuumgerät - Google Patents
Vakuumgerät Download PDFInfo
- Publication number
- EP3848588A1 EP3848588A1 EP20214823.5A EP20214823A EP3848588A1 EP 3848588 A1 EP3848588 A1 EP 3848588A1 EP 20214823 A EP20214823 A EP 20214823A EP 3848588 A1 EP3848588 A1 EP 3848588A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- control device
- identifier
- configuration parameter
- component
- device component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/02—Multi-stage pumps
- F04D19/04—Multi-stage pumps specially adapted to the production of a high vacuum, e.g. molecular pumps
- F04D19/042—Turbomolecular vacuum pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/001—Testing thereof; Determination or simulation of flow characteristics; Stall or surge detection, e.g. condition monitoring
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/02—Surge control
- F04D27/0292—Stop safety or alarm devices, e.g. stop-and-go control; Disposition of check-valves
Definitions
- the present invention relates to a vacuum device, in particular a vacuum pump, a vacuum measuring device, a leak detection device and / or a vacuum chamber device.
- the invention also relates to a method for producing a vacuum device, in particular a vacuum pump, a vacuum measuring device, a leak detector and / or a vacuum chamber device.
- vacuum pumps and their drive devices often form separable units and / or different vacuum pumps can be mounted on the same drive device during production so that different configuration parameters are applied to the pump depending on the pairing of the devices or device parts from the drive device.
- one or more characteristic resistors are attached to the vacuum pump according to common methods, which are then recognized by the drive unit, whereupon a set of configuration parameters previously stored in the drive unit is selected.
- configuration parameters are: nominal speed, speed limits, performance characteristics, temperature limits, behavior of accessories, characteristics for vibration spectra, etc.
- the number of usable combinations of characteristic resistors is limited, so that only a limited number of configuration parameter sets can be stored in the drive unit.
- Some configuration parameters serve the absolute function of the pump or the operational safety, e.g. nominal voltage of the motor, maximum phase current, nominal speed or maximum speed, absolute maximum temperatures of critical components such as motors.
- An alternative definition of the configuration parameters of the pump would consist in the possibility of entering all changeable parameters during manufacture or first pairing of the drive unit and pump, ie all values contained in a set of configuration parameters to be communicated to the drive unit once in a secure manner.
- This procedure has the following disadvantages: The amount of settings requires a not inconsiderable amount of input. Manual entry - as would be necessary, for example, in the event of service - would be very difficult and error-prone. In addition, special attention should be paid to choosing values in the valid range and taking any interdependencies into account. Parts of the configuration parameters, for example nominal speed and / or maximum motor temperature, can be established and, for example, by recognizing characteristic resistances Be part of a certified system for the safe limitation of the pump speed in terms of functional safety and cannot be changed without renewed certification.
- the vacuum device has a device component, in particular a pump component, a control device, in particular a drive device, for the device component, and an interface for connecting the control device to the device component.
- the control device is set up to control the device component on the basis of one or more configuration parameters.
- the known manufacturing method includes that a permanent hardware identifier, in particular a specific characteristic resistor combination, is provided on the device component and the control device is set up to recognize the hardware identifier and to define the configuration parameters on the basis of the hardware identifier.
- a software identifier is additionally provided in a non-volatile memory on the device component and the control device for recognizing the software identifier and for defining the second configuration parameter on the basis of the software Identifier is set up so that by the control device in the state connected to the device component both the first and the second configuration parameter can be set automatically.
- the control device can determine the configuration parameters automatically. This automatic determination takes place as a function of information stored on the device component, namely the identifiers provided on the device component.
- a respective identifier gives the control device information on the basis of which the device component is to be controlled.
- the relevant configuration parameter is defined on the basis of the identifier and the device component is controlled on the basis of the configuration parameter.
- An "identifier" is basically readable information that is specific in any way for the control of the device component, for example specifically for the construction of the device component and / or a certain, predetermined application scenario of the device component.
- An identifier can include, for example, a name and / or a number, for example an article number, of the device component.
- at least one configuration parameter can be coded directly in the identifier.
- the configuration parameters are different and each dependent on the relevant identifier be determined. This enables a differentiation between the configuration parameters, for example with regard to their safety relevance.
- the configuration parameters can advantageously be specified by an identifier of the type which is advantageous for the configuration parameter in question.
- the permanent hardware identifier can be used, for example, to allow the control device to automatically define particularly safety-relevant and / or certified configuration parameters.
- the permanent hardware identifier has the advantage, among other things, that the identifier can only be changed on the device component with great difficulty. In particular, direct and permanent manipulation of the hardware would be necessary, something that users of vacuum devices typically refrain from.
- the application-dependent configuration parameters are typically selected anyway in such a way that they apply in addition to the security-relevant configuration parameters and do not conflict with them. Accordingly, the certified definition can be retained and additional flexibility can still be created.
- the software identifier has the particular advantage that the amount of data that can be encoded in the identifier is typically significantly larger than in the case of a permanent hardware identifier.
- the possible amount of data for that is here relevant purposes practically infinitely large. Thanks to modern storage technologies, large amounts of data are possible in the smallest of spaces.
- Permanent hardware identifiers typically have a poorer ratio of the amount of coded data to the installation space.
- the amount of data is limited in particular by the fact that a resistor is typically assigned to several contacts of the interface between the control device and the device component.
- the software identifier can in particular be read out serially. This means that the number of contacts required for reading out at the interface remains the same even with a larger amount of data. With the software identifier, a larger amount of information can be stored on the device component in a simple manner and read out via the control device.
- the configuration parameters can thus be defined in a particularly flexible manner, specifically using the type of identifier that is advantageous in each case for the configuration parameters in question.
- both the hardware identifier and the software identifier are arranged on the device component.
- This information relates to the fact that the identifiers are arranged on the device component side in relation to the interface.
- the interface functions here as a functional separation between the control device and the device component.
- the device component and the control device can consist of several elements and / or assemblies.
- first and at least one second configuration parameter is usually mentioned.
- first and / or second configuration parameter for example, first and / or second configuration parameter sets, that is to say a plurality of first or second configuration parameters, can be provided.
- a hardware identifier is basically characterized in that the identifier is provided by the hardware itself, for example through design features and / or a specific arrangement of physical elements.
- the hardware identifier is not electronically programmable, but is typically provided during manufacture by forming and / or mounting physical elements on the device component.
- the hardware identifier is designed as a permanent identifier. I. E. the hardware identifier is permanent and cannot be easily changed. In particular, no means for changing the hardware identifier, such as selection switches, are provided on the device component. Subsequent physical manipulation of the hardware identifier is of course conceivable. However, the need for such a device to change the hardware identifier constitutes a high psychological hurdle and, in particular, is typically easy to detect, often also readily visible.
- the software identifier is electronically programmable at least during manufacture. It is stored in a storage medium, namely the non-volatile memory. It can be provided, for example, that the software identifier can no longer be electronically programmed subsequently. A subsequent change is also often undesirable with regard to the software identifier, but with regard to security, for example, it is less critical than with the hardware identifier.
- the software identifier can therefore preferably also be embodied permanently in the above-mentioned sense.
- the non-volatile memory can be designed, for example, as a memory that can only be written to once. Furthermore, especially in cases in which subsequent programming is possible, For example, measures are taken to make it more difficult for the control device to accept subsequent programming as permissible. In particular, cryptographic measures can be used for this.
- the memory in which the software identifier is stored is designed to be non-volatile.
- the memory is therefore particularly stable in the currentless state.
- control devices of a certain type are provided for device components of different types.
- a respective control device can then automatically determine the parameters relevant for the device component in question via the identifiers.
- the number of parts for the control device can thus be kept low.
- the device components can also differ not only in their design, but also in their application.
- application-specific configuration parameters on the device component can also be coded by an identifier and automatically defined by the control device.
- device components can, for example, only differ in their application and not in their design, and nevertheless different configuration parameters can be desirable.
- Such configuration parameters can be specified via the software identifier.
- the first configuration parameter can preferably be a configuration parameter that is security-relevant, certified and / or device-specific.
- the hardware identifier enables this type of configuration parameter to be recognized in a simple manner with a high degree of recognition reliability.
- a certification of the configuration parameter can be provided, for example, as a function of a specific hardware identifier.
- the first configuration parameter can, for example, have an absolute limit for a control variable, for example to ensure the operational safety of the device component.
- further, e.g. second, configuration parameters can be provided which further limit the control variable. For example, this can make sense in an application-specific manner, even if the specific device component could also be operated beyond these limits and up to the absolute limit, at least with regard to the security of the device component.
- control device is set up in particular to switch off the device component or to regulate the control variable in a compensatory manner, in particular to regulate it down, if the limit is exceeded or if it threatens to be exceeded.
- the first configuration parameter can relate, for example, to a nominal speed, a maximum speed, a nominal motor voltage, a maximum phase current and / or a maximum temperature of a device component. These configuration parameters can be set easily and safely using the hardware identifier.
- the second configuration parameter can be, for example, a configuration parameter that is application-specific, hazard-independent and / or certification-free.
- a configuration parameter that is application-specific, hazard-independent and / or certification-free.
- the second configuration parameter can in principle be device-specific or device-unspecific.
- the hardware identifier can be formed by at least one characteristic resistor, in particular a characteristic resistor combination, and / or by at least one mechanical feature that can be recognized by the control device.
- the control device can include, for example, a sensor system for recognizing the mechanical features, for example a light barrier, a capacitance sensor and / or an inductance sensor. It is also conceivable that a mechanical feature produces a conductivity that is recognized as information. The mechanical feature can, for example, conduct itself or actuate a pushbutton switch. More generally, it can be provided that a change in the state of the control device for establishing the first configuration parameter is generated as a result of the connection. The change in state can in principle be reversible or irreversible. In the irreversible case, the control device is then restricted to a specific hardware identifier, in particular to the specific type of device component connected.
- the non-volatile memory can be designed, for example, as a PROM, EPROM, EEPROM, flash memory and / or magnetic memory.
- the software identifier can be provided, for example, by programming the non-volatile memory using a programming adapter.
- the control device itself can be designed as a means for programming the non-volatile memory, for example.
- the control device can, for example, have an additional interface and means for forwarding the information to be programmed to the non-volatile memory via the interface that connects the control device to the device components.
- the interface comprises a plug connection. This enables a simple connection of the control device to the device component and simplifies the exchange of the control device.
- an identifier module is provided on the device component, which includes the hardware and / or software identifier.
- the identification module can preferably be exchangeable and / or provided on an outside of the device component.
- the identification module can be designed as a circuit board, which can preferably also have a plug connector for the interface.
- the circuit board can be fastened, for example, by screws, for example to a housing component of the device component.
- the circuit board can, for example, be replaced by a service employee if it is defective and / or the device component is to be used in a new application.
- a service employee can also reprogram the software identifier if the software identifier or the non-volatile memory is set up for this purpose.
- the control device for the first and / or second configuration parameter comprises a predefined table which includes an assignment of values for the configuration parameter to different identifier values, and that the first or second configuration parameter by the control device on the basis of the Table is definable. Accordingly, configuration parameters or sets are stored as tables predefined in the control device as a function of existing identifiers. About this is a simple one in particular Admissibility check on the part of the control device is possible. Furthermore, a table can be used to make it more difficult for third parties to assign configuration parameters to identifiers.
- an identifier can have a numerical value. The numerical value is then coded according to the type of identifier.
- At least one of the identifiers in particular the software identifier, comprises a product name and / or an article number of the device component. This is a simple way of specifically labeling the device components.
- At least one identifier in particular the software identifier, comprises checking information, in particular a checksum.
- the test information allows the validity of the identifier to be checked in a simple manner and incorrect definition of configuration parameters can be avoided.
- the test information thus forms a further security feature.
- the hardware identifier and the software identifier are each designed in such a way that they can at least essentially not be changed in a permissible manner by an unauthorized person, such as a user. This further increases security because the unauthorized person is prevented from defining possibly incorrect configuration parameters using incorrect identifiers. “Not permitted” in this context means that the control device detects that the relevant identifier was not specified by the manufacturer or, if applicable, an authorized service center. It can also be provided that the hardware identifier and the software identifier cannot be changed by an unauthorized person, such as a user, at least essentially - that is, neither in a permissible nor in an impermissible manner. Alternatively, the software identifier can be changed in a permissible manner, for example by an authorized person.
- the identifier can preferably be at least essentially pseudo-random and / or random-resistant. This means that the identifier appears to a third party as if by chance or that another permissible identifier can at least essentially not be found by simple trial and error. In particular, it should not be possible to draw any direct conclusions from the identifier about an article number and / or the configuration parameters of the device component.
- a simple possibility is that the identifier is generated by means of a hash function, the hash function using, for example, a product name, an article number and / or directly defined configuration parameters as input values.
- the measures described serve in particular to ensure that the identifier, in particular the software identifier, cannot be changed by the user of the vacuum device, that is to say not in a way that is considered permissible by the control device.
- the measures only make it more difficult to set a valid configuration parameter set incorrectly, for example by trial and error, without reference to the actually present pump, so that the selection of an incorrect configuration parameter set is made even more difficult.
- the control device can nevertheless infer the selected set of configuration parameters on the basis of the identifier defined during manufacture, for example by appropriate conversion or mapping.
- the control device can, for example, have a predefined decryption function and / or a predefined table.
- control device is set up to prevent the operation of the device component if no permissible hardware identifier can be recognized. It can thus be ensured in a simple manner that the device component is not operated in an impermissible manner and, in particular, not in a dangerous manner. In principle, it is also conceivable that the operation of the device component is only restricted if no permissible hardware identifier can be recognized.
- control device is set up to partially or completely prevent the operation and / or certain functionalities of the device component until a permissible software identifier has been recognized. If the second configuration parameter determined by the software identifier is not safety-relevant, for example, operation or certain functionalities of the device component can be enabled even if no permissible software identifier has been recognized. In particular, however, it can be a prerequisite that a permissible hardware identifier has been recognized.
- control device is set up to initiate operation on the basis of at least one preset value for the second configuration parameter until a permissible software identifier has been recognized. Operation of the device component can thus be made possible in a simple manner, even if no software identifier can be recognized. Here, too, it can be a prerequisite that a valid hardware identifier has been recognized.
- a vacuum device according to the independent claim directed thereto.
- This includes a device component, in particular a pump component, a control device, in particular a drive device for the device component, and an interface for connecting the control device to the device component, the control device being set up to control the device component on the basis of at least a first configuration parameter and a second configuration parameter, with a permanent hardware identifier on the device component is provided and the control device is set up for recognizing the hardware identifier and determining the first configuration parameter on the basis of the hardware identifier, with a software identifier being provided in a non-volatile memory on the device component and the control device for recognizing the software identifier and for Determination of the second configuration parameter is set up on the basis of the software identifier, so that both the first and the second configuration parameter by the control device in the state connected to the device component can be determined automatically.
- the software identifier can in particular be defined by the manufacturer.
- the vacuum device does not have a user interface that enables the software identifier to be changed.
- means and / or measures to prevent and / or hinder a subsequent change to the software identifier can be provided.
- a vacuum device can be, for example, a vacuum pump, a vacuum chamber, a measuring and / or analysis device, a leak detector, a guide element, a valve, a vacuum feed-through or a manipulator.
- a guide element is an element for guiding a gas flow or a vacuum.
- a vacuum feed-through enables energy and / or information to be passed between a vacuum area and an area that is separate from the vacuum area, such as a pressure or atmosphere area.
- a Manipulator is a device for transferring movement from a pressure or atmosphere area to a vacuum area.
- examples of vacuum devices include a mass spectrometer or an electron microscope.
- a vacuum device can also comprise combinations of the above devices.
- the present idea takes up in particular the possibilities explained at the beginning for the definition of configuration parameters, namely the definition based on identifiers on the one hand and manual input on the other hand, and combines them in an advantageous manner.
- this is achieved in that the safety-relevant and certified parts of the configuration parameters, in particular the nominal or maximum speed, are still recognized by hardware identifier, in particular by a combination of characteristic resistors.
- the number and gradation of characteristic resistances can be chosen sensibly.
- the named configuration parameters can also be recognized and determined by other features, for example by recognizing mechanical conditions on the pump by the drive electronics. The number of different nominal speeds is significantly lower than the number of other configuration parameters and their future growth is foreseeable.
- the security-relevant and certified configuration parameters mentioned can also be defined by freely assigning them.
- a stored, known combination of characteristic resistances or patterns is assigned to a freely selected nominal speed.
- the configuration parameters can also be derived, for example, from a mapping rule.
- the detected characteristic resistance can be converted directly into a nominal speed using a known ratio. This can be done, for example, by linear assignment, rounding, spreading, offset or other clear conversions and mathematical mapping continuously or in defined gradations.
- the remaining, in particular second, configuration parameters are permanently stored as assigned records in the control device, in particular in the drive unit, and these records can then be selected appropriately, in particular during manufacture, in particular by appropriate programming of the software identifier.
- the control device then recognizes the safety-relevant, in particular the first, configuration parameters of the device component, in particular the pump, for example a specific nominal or maximum speed, by evaluating the characteristic resistances or other named methods. Unless a definition has already been made in advance, one or more sets of the remaining, in particular second, configuration parameters are available. These can now be selected with a simple identifier - in the simplest case an index, but better protected by a checksum - conveniently once during production or in the event of service.
- the selection can be made, for example, by specifying the article number of the device component, but also by any other type of identifier.
- a number can also be used that does not allow any direct conclusions to be drawn about the article number of the device component, but rather, for example, must either be formed as a type of hash code or taken from a table.
- the control device can deduce the selected set of configuration parameters from this information by appropriate conversion or mapping. In the ideal case, the selection is only made once and is stored in the device component in a non-volatile manner. When replacing a control device on such a device component, the former recognizes the first configuration parameter to be defined, in particular the nominal speed, through the characteristic resistors, and the selected second configuration parameter set through reading out the non-volatile memory.
- a control device has recognized the safety-relevant parts of the configuration parameters, but the remaining parameters have not yet been selected, various measures can be taken. Among other things, this can be the complete or partial suppression of functions of the device component, in particular the operation of the device component or also the control of accessories or communication with other components or communication participants.
- a type of default configuration parameter set can also be selected. This can be one of the records stored for various device components, but also a special record that is defined for this case alone. Either the safest of the individual configuration parameters can be selected or another suitable value determined by the application.
- the measures described have numerous advantages. With the method described, the number of application- and device-specific configuration parameter sets can be expanded independently of the possible number of combinations of the characteristic resistors. The parameter sets themselves can only assume valid and meaningful values through predefinition in the control device, and their selection is possible with simple means.
- the turbo molecular pump 111 shown comprises a pump inlet 115 which is surrounded by an inlet flange 113 and to which a recipient (not shown) can be connected in a manner known per se.
- the gas from the recipient can be sucked out of the recipient via the pump inlet 115 and conveyed through the pump to a pump outlet 117 to which a backing pump, such as a rotary vane pump, can be connected.
- the inlet flange 113 forms according to FIG Fig. 1 the upper end of the housing 119 of the vacuum pump 111.
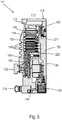
- the housing 119 comprises a lower part 121 on which an electronics housing 123 is arranged laterally. Electrical and / or electronic components of the vacuum pump 111 are accommodated in the electronics housing 123, for example for operating an electric motor 125 arranged in the vacuum pump (see also FIG Fig. 3 ).
- a plurality of connections 127 for accessories are provided on the electronics housing 123.
- a data interface 129 for example in accordance with the RS485 standard, and a power supply connection 131 are arranged on the electronics housing 123.
- turbo-molecular pumps that do not have an electronic housing attached in this way, but are connected to external drive electronics.
- a flood inlet 133 in particular in the form of a flood valve, is provided on the housing 119 of the turbo molecular pump 111, via which the vacuum pump 111 can be flooded.
- a sealing gas connection 135, which is also referred to as a purging gas connection via which purging gas is used to protect the electric motor 125 (see e.g. Fig. 3 ) can be admitted into the engine compartment 137, in which the electric motor 125 in the vacuum pump 111 is accommodated, before the gas conveyed by the pump.
- Two coolant connections 139 are also arranged in the lower part 121, one of the coolant connections being provided as an inlet and the other coolant connection being provided as an outlet for coolant, which can be passed into the vacuum pump for cooling purposes.
- Other existing turbo-molecular vacuum pumps (not shown) are operated exclusively with air cooling.
- the lower side 141 of the vacuum pump can serve as a standing surface, so that the vacuum pump 111 can be operated standing on the lower side 141.
- the vacuum pump 111 can, however, also be attached to a recipient via the inlet flange 113 and can thus be operated in a suspended manner, as it were.
- the vacuum pump 111 can be designed in such a way that it can also be put into operation when it is oriented in a different way than in FIG Fig. 1 is shown.
- Embodiments of the vacuum pump can also be implemented in which the underside 141 cannot be arranged facing downwards, but facing to the side or facing upwards. In principle, any angle is possible.
- various screws 143 are also arranged by means of which components of the vacuum pump not specified here are attached to one another.
- a bearing cap 145 is attached to the underside 141.
- Fastening bores 147 are also arranged on the underside 141, via which the pump 111 can be fastened to a support surface, for example. This is not possible with other existing turbo molecular vacuum pumps (not shown), which are in particular larger than the pump shown here.
- a coolant line 148 is shown, in which the coolant introduced and discharged via the coolant connections 139 can circulate.
- the vacuum pump comprises several process gas pump stages for conveying the process gas present at the pump inlet 115 to the pump outlet 117.
- a rotor 149 is arranged in the housing 119 and has a rotor shaft 153 rotatable about an axis of rotation 151.
- the turbomolecular pump 111 comprises several turbomolecular pump stages connected in series with one another for effective pumping, with several radial rotor disks 155 fastened to the rotor shaft 153 and stator disks 157 arranged between the rotor disks 155 and fixed in the housing 119 a rotor disk 155 and an adjacent stator disk 157 each form a turbomolecular pump stage.
- the stator disks 157 are held at a desired axial distance from one another by spacer rings 159.
- the vacuum pump also comprises Holweck pump stages which are arranged one inside the other in the radial direction and are connected in series with one another for effective pumping. There are other turbo-molecular vacuum pumps (not shown) that do not have Holweck pump stages.
- the rotor of the Holweck pump stages comprises a rotor hub 161 arranged on the rotor shaft 153 and two cylinder-jacket-shaped Holweck rotor sleeves 163, 165 which are attached to the rotor hub 161 and carried by the latter, which are oriented coaxially to the axis of rotation 151 and nested in one another in the radial direction. Furthermore, two cylinder jacket-shaped Holweck stator sleeves 167, 169 are provided, which are also oriented coaxially to the axis of rotation 151 and, viewed in the radial direction, are nested inside one another.
- the active pumping surfaces of the Holweck pump stages are formed by the jacket surfaces, that is to say by the radial inner and / or outer surfaces, of the Holweck rotor sleeves 163, 165 and the Holweck stator sleeves 167, 169.
- the radial inner surface of the outer Holweck stator sleeve 167 lies opposite the radial outer surface of the outer Holweck rotor sleeve 163 with the formation of a radial Holweck gap 171 and with this forms the first Holweck pump stage following the turbomolecular pumps.
- the radial inner surface of the outer Holweck rotor sleeve 163 faces the radial outer surface of the inner Holweck stator sleeve 169 with the formation of a radial Holweck gap 173 and forms with this a second Holweck pumping stage.
- the radial inner surface of the inner Holweck stator sleeve 169 lies opposite the radial outer surface of the inner Holweck rotor sleeve 165 with the formation of a radial Holweck gap 175 and with this forms the third Holweck pumping stage.
- a radially running channel can be provided, via which the radially outer Holweck gap 171 is connected to the central Holweck gap 173.
- a radially running channel can be provided at the upper end of the inner Holweck stator sleeve 169, via which the middle Holweck gap 173 is connected to the radially inner Holweck gap 175.
- a connecting channel 179 to the outlet 117 can also be provided at the lower end of the radially inner Holweck rotor sleeve 165.
- the aforementioned pump-active surfaces of the Holweck stator sleeves 167, 169 each have a plurality of Holweck grooves running spirally around the axis of rotation 151 in the axial direction, while the opposite lateral surfaces of the Holweck rotor sleeves 163, 165 are smooth and the gas for operating the Drive vacuum pump 111 in the Holweck grooves.
- a roller bearing 181 is provided in the area of the pump outlet 117 and a permanent magnetic bearing 183 in the area of the pump inlet 115.
- a conical injection molded nut 185 is provided on the rotor shaft 153 with an outer diameter that increases towards the roller bearing 181.
- the injection-molded nut 185 is in sliding contact with at least one stripper of an operating medium reservoir.
- an injection screw can be provided instead of an injection nut. Since different designs are thus possible, the term "spray tip" is also used in this context.
- the operating medium reservoir comprises several absorbent disks 187 stacked on top of one another, which are impregnated with an operating medium for the roller bearing 181, e.g. with a lubricant.
- the operating medium is transferred by capillary action from the operating medium reservoir via the scraper to the rotating injection nut 185 and, as a result of the centrifugal force, is conveyed along the injection nut 185 in the direction of the increasing outer diameter of the injection nut 185 to the roller bearing 181, where it eg fulfills a lubricating function.
- the roller bearing 181 and the operating medium store are enclosed in the vacuum pump by a trough-shaped insert 189 and the bearing cover 145.
- the permanent magnetic bearing 183 comprises a rotor-side bearing half 191 and a stator-side bearing half 193, each of which comprises a ring stack of several permanent magnetic rings 195, 197 stacked on top of one another in the axial direction.
- the ring magnets 195, 197 are opposite one another with the formation of a radial bearing gap 199, the rotor-side ring magnets 195 being arranged radially on the outside and the stator-side ring magnets 197 being arranged radially on the inside.
- the magnetic field present in the bearing gap 199 causes magnetic repulsive forces between the ring magnets 195, 197, which cause the rotor shaft 153 to be supported radially.
- the rotor-side ring magnets 195 are carried by a carrier section 201 of the rotor shaft 153 which surrounds the ring magnets 195 radially on the outside.
- the stator-side ring magnets 197 are carried by a stator-side support section 203 which extends through the ring magnets 197 and is suspended from radial struts 205 of the housing 119.
- the ring magnets 195 on the rotor side are fixed parallel to the axis of rotation 151 by a cover element 207 coupled to the carrier section 201.
- the stator-side ring magnets 197 are parallel to the axis of rotation 151 in one direction by a fastening ring 209 connected to the carrier section 203 and a fastening ring 209 connected to the carrier section 203 connected fastening ring 211 set.
- a plate spring 213 can also be provided between the fastening ring 211 and the ring magnet 197.
- An emergency or retainer bearing 215 is provided within the magnetic bearing, which runs empty during normal operation of the vacuum pump 111 without contact and only comes into engagement with an excessive radial deflection of the rotor 149 relative to the stator to create a radial stop for the rotor 149 to form so that a collision of the rotor-side structures with the stator-side structures is prevented.
- the backup bearing 215 is designed as an unlubricated roller bearing and forms a radial gap with the rotor 149 and / or the stator, which has the effect that the backup bearing 215 is disengaged during normal pumping operation.
- the radial deflection at which the backup bearing 215 engages is dimensioned large enough that the backup bearing 215 does not come into engagement during normal operation of the vacuum pump, and at the same time small enough that a collision of the rotor-side structures with the stator-side structures under all circumstances is prevented.
- the vacuum pump 111 comprises the electric motor 125 for rotatingly driving the rotor 149.
- the armature of the electric motor 125 is formed by the rotor 149, the rotor shaft 153 of which extends through the motor stator 217.
- a permanent magnet arrangement can be arranged radially on the outside or embedded on the section of the rotor shaft 153 extending through the motor stator 217.
- the motor stator 217 is fixed in the housing within the motor compartment 137 provided for the electric motor 125.
- a sealing gas which is also referred to as a flushing gas and which can be air or nitrogen, for example, can enter the engine compartment 137 via the sealing gas connection 135.
- the electric motor 125 can be protected from process gas, e.g. from corrosive components of the process gas, via the sealing gas.
- the engine compartment 137 can also be evacuated via the pump outlet 117, i.e. the vacuum pressure produced by the backing pump connected to the pump outlet 117 is at least approximately in the engine compartment 137.
- a so-called and known labyrinth seal 223 can also be provided between the rotor hub 161 and a wall 221 delimiting the engine compartment 137, in particular to achieve better sealing of the motor compartment 217 from the Holweck pump stages located radially outside.
- a vacuum device 250 is shown, which comprises a device component 252 and a control device 254 for controlling the device component 252.
- the device component 252 and the control device 254 can be connected via an interface 256 and are in Fig. 6 shown in the separated state.
- the control device 254 In order to put the device component 252 into operation, the control device 254 must be connected to the device component 252 via the interface 256.
- the interface 256 is a plug connection, ie the control device 254 only needs to be plugged into the device component 252 and preferably additionally fastened.
- the device component 252 here comprises, for example, a pump unit 258.
- a pump unit 258 With regard to the pump-active components, this can, in particular, correspond to those described above and in FIG Figs. 1 to 5 shown turbo molecular pump 111 be formed.
- the device component 252 also includes a hardware identifier 260 and a software identifier 262.
- the hardware identifier 260 is designed, for example, as a combination of characteristic resistors, while the software identifier 262 is stored in a non-volatile memory 263.
- the hardware identifier 260 and the software identifier 262 are arranged on an identifier module 264 which, for example, can be subsequently exchanged by the manufacturer.
- the device component 252 can, for example, form a pump component, for example that of the Figs. 1 to 5 Turbomolecular pump 111 shown.
- This pump component comprises in particular the housing 119, the lower part 121 and the components arranged within these two elements.
- the pump component of the turbo molecular pump 111 comprises an identification module 264, which is shown in FIG Fig. 3 is marked.
- the identification module 264 is designed as a circuit board which carries both the hardware identification in the form of a combination of identification resistors and the software identification in a non-volatile memory.
- the board comprises a plug connector which forms the device component-side part of an interface 256 for connecting a control device.
- the control device for the device component is accommodated in the electronics housing 123.
- the control device comprises a plug connector which corresponds to that of the device component and forms the part of the interface 256 on the control device side.
- the control device 254 of the Fig. 6 A plurality of configuration parameters 268, which are individually referenced by sequential numbers, are provided.
- the control device 254 comprises a recognition unit 266 for recognizing the hardware identifier 260 and the software identifier 262 in the state connected via the interface 256. Based on the identifiers 260 and 262, the recognition unit 266 or another unit defines the configuration parameters 268. At least one first configuration parameter 268 is defined on the basis of the recognized hardware identifier 260 and at least one second configuration parameter 268 is defined on the basis of the recognized software identifier 262.
- the configuration parameters 268.1 and 268.2 can be defined on the basis of the recognized hardware identifier 260 and the configuration parameters 268.3 to 268.7 can be defined on the basis of the recognized software identifier 262. Other assignments are of course possible.
- the configuration parameters 268 are preferably set automatically by the control device 254 on the basis of the identifiers 260 and 262 when the control device 254 is connected to the device component 252 for the first time and / or after a power supply to the vacuum device is switched on.
- the control device 254 also comprises a control unit 270, which controls the pump unit 258 on the basis of the previously established configuration parameters 268.
- Both the identification of the identifiers 260 and 262 and the control of the pump unit 258 take place here via one and the same interface 256. In principle, however, separate interfaces can also be provided, for example.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Non-Positive Displacement Air Blowers (AREA)
Abstract
Description
- Die vorliegende Erfindung betrifft ein Vakuumgerät, insbesondere eine Vakuumpumpe, ein Vakuummessgerät, ein Lecksuchgerät und/oder ein Vakuumkammergerät. Die Erfindung betrifft auch ein Verfahren zur Herstellung eines Vakuumgeräts, insbesondere einer Vakuumpumpe, eines Vakuummessgerät, eines Lecksuchgeräts und/oder Vakuumkammergeräts.
- Zum Beispiel Vakuumpumpen und deren Antriebsgeräte bilden häufig trennbare Einheiten und/oder es können bei der Produktion verschiedene Vakuumpumpen an das gleiche Antriebsgerät montiert werden, sodass abhängig von der Paarung der Geräte bzw. Geräteteile vom Antriebsgerät unterschiedliche Konfigurationsparameter auf die Pumpe angewendet werden.
- Zur automatischen Erkennung der anzuwendenden Konfigurationsparameter werden nach gängigen Verfahren in der Vakuumpumpe ein oder mehrere Kennwiderstände angebracht, die dann vom Antriebsgerät erkannt werden, woraufhin ein vorher im Antriebsgerät hinterlegter Satz an Konfigurationsparametern ausgewählt wird. Beispiele solcher Konfigurationsparameter sind: Nenndrehzahl, Drehzahlgrenzen, Leistungskennlinien, Temperaturgrenzen, Verhalten von Zubehör, Kennlinien für Schwingungsspektren, usw.
- Aufgrund von Bauteiltoleranzen, Fertigungsmethoden und Verhalten der Erkennung der Kennwiderstände im Fehlerfall (z.B. Kurzschluss zu anderen Signalen oder untereinander) ist die Anzahl der verwendbaren Kombinationen der Kennwiderstände begrenzt, sodass auch nur eine begrenzte Menge an Konfigurationsparametersätzen im Antriebsgerät hinterlegt werden kann.
- Einige Konfigurationsparameter dienen der absoluten Funktion der Pumpe bzw. der Betriebssicherheit, so z.B. Nennspannung des Motors, maximaler Phasenstrom, Nenndrehzahl bzw. maximale Drehzahl, absolute Maximaltemperaturen von kritischen Bauteilen wie z.B. Motoren.
- Andere Konfigurationsparameter dienen applikationsabhängigen Beeinflussungen des Betriebs, so z.B. Temperaturgrenzen in Abhängigkeit von Kühlmethoden oder Einsatzort, Ansteuerung von Vorpumpen und Ventilen, Leistungskennlinien.
- Durch Anpassungen an Prozesse und Applikationen sind so teilweise unterschiedliche Sätze an Konfigurationsparametern für ein und dieselbe Kombination von Antriebsgerät und Pumpen notwendig, die unter unterschiedlichen Umgebungsbedingungen eingesetzt werden. Durch o.g. Einschränkungen der maximalen Anzahl an Kombinationen von Kennwiderständen ist somit auch die maximale Anzahl an Konfigurationsparametersätzen und somit an Pumpen bzw. Applikationen für ein gegebenes Antriebsgerät begrenzt.
- Eine alternative Festlegung der Konfigurationsparameter der Pumpe würde in der Möglichkeit bestehen, bei Herstellung bzw. erster Paarung von Antriebsgerät und Pumpe sämtliche veränderbaren Parameter einzugeben, d.h. alle Werte, die in einem Satz an Konfigurationsparametern enthalten sind, einmalig dem Antriebsgerät in gesicherter Weise mitzuteilen. Dieses Verfahren zieht folgende Nachteile mit sich: Die Menge an Einstellungen erfordert einen nicht unerheblichen Aufwand bei der Eingabe. Eine manuelle Eingabe - wie sie z.B. im Servicefall erforderlich wäre - würde damit sehr schwierig und fehleranfällig. Zudem müsste besonderes Augenmerk darauf gelegt werden, dass Werte im gültigen Bereich gewählt und eventuelle Abhängigkeiten untereinander berücksichtig werden. Teile der Konfigurationsparameter, z.B. Nenndrehzahl und/oder maximale Motortemperatur, können beispielsweise durch Erkennung von Kennwiderständen festgelegt werden und Bestandteil eines zertifizierten Systems zur sicheren Begrenzung der Pumpendrehzahl im Sinne der funktionalen Sicherheit sein und können nicht ohne erneute Zertifizierung geändert werden.
- Die vorstehend beschriebenen Nachteile ergeben sich in ähnlicher Weise bei Vakuumgeräten im Allgemeinen, welche eine Gerätekomponente und eine Steuerungsvorrichtung aufweisen, die über eine Schnittstelle verbunden sind.
- Bei einem bekannten Verfahren zur Herstellung eines Vakuumgeräts weist das Vakuumgerät eine Gerätekomponente, insbesondere eine Pumpkomponente, eine Steuerungsvorrichtung, insbesondere ein Antriebsgerät, für die Gerätekomponente, und eine Schnittstelle zur Verbindung der Steuerungsvorrichtung mit der Gerätekomponente auf. Die Steuerungsvorrichtung ist dazu eingerichtet, die Gerätekomponente auf Basis ein oder mehrerer Konfigurationsparameter zu steuern. Das bekannte Herstellungsverfahren umfasst, dass an der Gerätekomponente eine permanente Hardware-Kennung, insbesondere eine spezifische Kennwiderstandskombination, vorgesehen wird und die Steuerungsvorrichtung zur Erkennung der Hardware-Kennung und Festlegung der Konfigurationsparameter auf Basis der Hardware-Kennung eingerichtet wird.
- Ausgehend von diesem bekannten Verfahren ist es eine Aufgabe der Erfindung, die Festlegung der Konfigurationsparameter flexibler zu gestalten, insbesondere unter Wahrung der funktionalen Sicherheit.
- Diese Aufgabe wird durch ein Verfahren nach Anspruch 1 gelöst, und insbesondere dadurch, dass an der Gerätekomponente zusätzlich eine Software-Kennung in einem nichtflüchtigen Speicher vorgesehen wird und die Steuerungsvorrichtung zur Erkennung der Software-Kennung und zur Festlegung des zweiten Konfigurationsparameters auf Basis der Software-Kennung eingerichtet wird, sodass durch die Steuerungseinrichtung im mit der Gerätekomponente verbundenen Zustand sowohl der erste als auch der zweite Konfigurationsparameter selbsttätig festlegbar ist.
- Im verbundenen Zustand, insbesondere nach dem Anschließen der Steuerungsvorrichtung an die Gerätekomponente und/oder während eines Hochfahrvorgangs der Steuerungsvorrichtung, zum Beispiel ausgelöst durch Bereitstellen einer Stromversorgung nach zwischenzeitlich fehlender Stromversorgung, kann also eine selbsttätige Festlegung der Konfigurationsparameter seitens der Steuerungsvorrichtung erfolgen. Diese automatische Festlegung erfolgt in Abhängigkeit von an der Gerätekomponente hinterlegten Informationen, nämlich den an der Gerätekomponente vorgesehenen Kennungen.
- Eine jeweilige Kennung gibt der Steuerungsvorrichtung eine Information, auf deren Basis die Gerätekomponente gesteuert werden soll. Anhand der Kennung wird der betreffende Konfigurationsparameter festgelegt und die Gerätekomponente wird auf Basis des Konfigurationsparameters gesteuert. Eine "Kennung" ist also grundsätzlich eine auslesbare Information, die in irgendeiner Weise für die Steuerung der Gerätekomponente spezifisch ist, beispielsweise spezifisch für die Bauweise der Gerätekomponente und/oder ein bestimmtes, vorgegebenes Anwendungsszenario der Gerätekomponente.
- Eine Kennung kann beispielsweise einen Namen und/oder eine Nummer, beispielsweise eine Artikelnummer, der Gerätekomponente umfassen. Alternativ oder zusätzlich kann beispielsweise wenigstens ein Konfigurationsparameter direkt in der Kennung kodiert sein.
- Im Zusammenhang mit der selbsttätigen Festlegung der Konfigurationsparameter durch die Steuerungsvorrichtung ist es eine Besonderheit der Erfindung, dass zwei unterschiedliche Kennungen vorgesehen sind und die Konfigurationsparameter unterschiedlich und jeweils in Abhängigkeit von der betreffenden Kennung festgelegt werden. Damit ist eine Differenzierung zwischen den Konfigurationsparameter möglich, beispielsweise in Bezug auf ihre Sicherheitsrelevanz. Dabei können die Konfigurationsparameter vorteilhafter Weise durch eine Kennung nach derjenigen Art festgelegt werden, welche für den betreffenden Konfigurationsparameter vorteilhaft ist.
- Die permanente Hardware-Kennung kann etwa dazu verwendet werden, besonders sicherheitsrelevante und/oder zertifizierte Konfigurationsparameter automatisch von der Steuerungsvorrichtung festlegen zu lassen. Im Zusammenhang mit derartigen Konfigurationsparametern weist die permanente Hardware-Kennung unter anderem den Vorteil auf, dass die Kennung nur äußerst schwierig an der Gerätekomponente veränderbar ist. Insbesondere wäre eine direkte und bleibende Manipulation der Hardware nötig, wovon Benutzer von Vakuumgeräten typischerweise absehen. Ferner besteht häufig der Vorteil, dass für eine bestehende Zuordnung von permanenter Hardware-Kennung mit wenigstens einem, insbesondere sicherheitsrelevanten, Konfigurationsparameter eine Zertifizierung besteht, insbesondere eine Sicherheitszertifizierung. In diesem Fall lässt sich die betreffende Zuordnung weiterhin nutzen, ohne dass eine erneute Zertifizierung notwendig wäre.
- Die applikationsabhängigen Konfigurationsparameter werden typischerweise ohnehin so gewählt, dass sie zu den sicherheitsrelevanten Konfigurationsparametern zusätzlich gelten und mit diesen nicht in Konflikt stehen. Dementsprechend kann die zertifizierte Festlegung beibehalten und trotzdem zusätzliche Flexibilität geschaffen werden.
- Beispielsweise weniger sicherheitsrelevante Konfigurationsparameter lassen sich also über die Software-Kennung festlegen. In diesem Zusammenhang weist die Software-Kennung insbesondere den Vorteil auf, dass die in der Kennung kodierbare Datenmenge typischerweise deutlich größer ist als bei einer permanenten Hardware-Kennung. Insbesondere ist die mögliche Datenmenge für die hier relevanten Zwecke praktisch unendlich groß. Durch moderne Speichertechnologien sind jedenfalls auf kleinstem Raum große Datenmengen möglich. Permanente Hardware-Kennungen weisen hingegen typischerweise ein schlechteres Verhältnis von der kodierten Datenmenge zum Bauraum auf. Bei der Verwendung einer Kennwiderstandskombination ist die Datenmenge insbesondere auch dadurch beschränkt, dass typischerweise mehreren Kontakten der Schnittstelle zwischen Steuerungsvorrichtung und Gerätekomponente jeweils ein Widerstand zugeordnet ist. D. h. es ist stets eine Anzahl an Kontakten der Schnittstelle belegt, die der Anzahl an Kennwiderständen entspricht. Wenn man nun die Datenmenge vergrößern wollte, wären mehr Kennwiderstände und somit mehr belegte Kontakte an der Schnittstelle nötig. Die Software-Kennung hingegen lässt sich insbesondere seriell auslesen. Damit bleibt auch bei vergrößerter Datenmenge die Anzahl der zum Auslesen nötigen Kontakte an der Schnittstelle gleich. Mit der Software-Kennung lässt sich also auf einfache Weise eine größere Menge an Informationen an der Gerätekomponente hinterlegen und über die Steuerungsvorrichtung auslesen. Damit lassen sich die Konfigurationsparameter besonders flexibel festlegen, und zwar unter Nutzung der für die betreffenden Konfigurationsparameter jeweils vorteilhaften Kennungsart.
- Erfindungsgemäß sind sowohl die Hardware-Kennung als auch die Software-Kennung an der Gerätekomponente angeordnet. Diese Angabe bezieht sich darauf, dass die Kennungen in Bezug auf die Schnittstelle gerätekomponentenseitig angeordnet sind. Die Schnittstelle fungiert hier also als funktionale Trennung zwischen Steuerungsvorrichtung und Gerätekomponente. Grundsätzlich können aber die Gerätekomponente und die Steuerungsvorrichtung für sich genommen aus mehreren Elementen und/oder Baugruppen bestehen.
- Vorstehend und im Folgenden ist zumeist von wenigstens einem ersten und wenigstens einem zweiten Konfigurationsparameter die Rede. Anstelle des ersten und/oder zweiten Konfigurationsparameters können beispielsweise auch erste und/oder zweite Konfigurationsparametersätze, also eine Mehrzahl erster bzw. zweiter Konfigurationsparameter vorgesehen sein.
- Eine Hardware-Kennung zeichnet sich grundsätzlich dadurch aus, dass die Kennung durch die Hardware selbst bereitgestellt wird, etwa durch Konstruktionsmerkmale und/oder eine spezifische Anordnung von physischen Elementen. Insbesondere ist die Hardware-Kennung nicht elektronisch programmierbar, sondern wird typischerweise während der Herstellung durch Ausbilden und/oder Montieren von physischen Elementen an der Gerätekomponente vorgesehen.
- Die Hardware-Kennung ist als permanente Kennung ausgeführt. D. h. die Hardware-Kennung ist dauerhaft und nicht ohne weiteres veränderbar. Insbesondere sind an der Gerätekomponente keine Mittel zum Verändern der Hardware-Kennung, wie etwa Auswahlschalter, vorgesehen. Eine nachträgliche physische Manipulation der Hardware-Kennung ist natürlich denkbar. Allerdings bildet die Notwendigkeit einer solchen zur Änderung der Hardware-Kennung eine hohe psychologische Hürde und ist insbesondere typischerweise einfach nachweisbar, häufig auch ohne weiteres sichtbar.
- Die Software-Kennung ist hingegen zumindest im Rahmen der Herstellung elektronisch programmierbar. Sie ist in einem Speichermedium, nämlich dem nichtflüchtigen Speicher hinterlegt. Es kann beispielsweise vorgesehen sein, dass die Software-Kennung nachträglich nicht mehr elektronisch programmierbar ist. Auch was die Software-Kennung betrifft, ist eine nachträgliche Veränderung häufig unerwünscht, im Hinblick auf die Sicherheit aber zum Beispiel weniger kritisch als bei der Hardware-Kennung. Daher kann die Software-Kennung bevorzugt auch permanent im oben genannten Sinne ausgebildet sein. Um eine nachträgliche Programmierung zu verhindern, kann der nichtflüchtige Speicher beispielsweise als ein nur einmal beschreibbarer Speicher ausgebildet sein. Ferner können insbesondere in Fällen, in denen eine nachträgliche Programmierung möglich ist, beispielsweise Maßnahmen getroffen werden, um zu erschweren, dass eine nachträgliche Programmierung von der Steuerungsvorrichtung als zulässig akzeptiert wird. Hierfür können insbesondere kryptografische Maßnahmen zum Einsatz kommen.
- Der Speicher, in dem die Software-Kennung hinterlegt wird, ist nichtflüchtig ausgebildet. Der Speicher ist also insbesondere auch im stromlosen Zustand beständig.
- Das erfindungsgemäße Herstellungsverfahren erweist sich als besonders vorteilhaft, wenn vorgesehen ist, dass Steuerungsvorrichtungen einer bestimmten Bauart für Gerätekomponenten unterschiedlicher Bauart vorgesehen sind. Eine jeweilige Steuerungsvorrichtung kann dann über die Kennungen die für die betreffende Gerätekomponente maßgeblichen Parameter selbsttätig festlegen. Für die Steuerungsvorrichtung lässt sich somit die Teilevielfalt gering halten. Die Gerätekomponenten können sich ferner nicht nur in der Bauart unterscheiden, sondern auch in der Anwendung. Generell lassen sich auch applikationsspezifische Konfigurationsparameter an der Gerätekomponente durch eine Kennung kodieren und von der Steuerungsvorrichtung automatisch festlegen. Grundsätzlich können sich Gerätekomponenten beispielsweise auch nur in der Anwendung und nicht in der Bauart unterscheiden, und trotzdem können unterschiedliche Konfigurationsparameter wünschenswert sein. Derartige Konfigurationsparameter können über die Software-Kennung festgelegt werden.
- Bei dem ersten Konfigurationsparameter kann es sich bevorzugt um einen Konfigurationsparameter handeln, der sicherheitsrelevant, zertifiziert und/oder gerätespezifisch ist. Durch die Hardware-Kennung ist auf einfache Weise für diese Art von Konfigurationsparametern eine Erkennung mit hohem Maß an Erkennungssicherheit realisiert. Eine Zertifizierung des Konfigurationsparameters kann beispielsweise in Abhängigkeit von einer bestimmten Hardware-Kennung vorgesehen sein.
- Generell kann der erste Konfigurationsparameter beispielsweise eine absolute Grenze für eine Steuergröße aufweisen, etwa zur Sicherstellung der Betriebssicherheit der Gerätekomponente. Grundsätzlich können beispielsweise weitere, z.B. zweite, Konfigurationsparameter vorgesehen sein, welche die Steuergröße weiter begrenzen. Dies kann beispielsweise applikationsspezifisch sinnvoll sein, auch wenn die konkrete Gerätekomponente zumindest im Hinblick auf die Sicherheit der Gerätekomponente auch jenseits dieser Grenzen und bis hin zur absoluten Grenze betrieben werden könnte.
- Sofern ein Konfigurationsparameter eine Grenze für eine Steuergröße aufweist, ist die Steuerungsvorrichtung insbesondere dazu eingerichtet, die Gerätekomponente abzuschalten oder die Steuergröße ausgleichend zu regeln, insbesondere herunterzuregeln, wenn die Grenze überschritten wird oder wenn eine Überschreitung droht.
- Der erste Konfigurationsparameter kann beispielsweise eine Nenndrehzahl, eine Maximaldrehzahl, eine Motornennspannung, einen maximalen Phasenstrom und/oder eine Maximaltemperatur einer Gerätekomponente betreffen. Diese Konfigurationsparameter lassen sich durch die Hardware-Kennung auf einfache und sichere Weise festlegen.
- Bei dem zweiten Konfigurationsparameter kann es sich beispielsweise um einen Konfigurationsparameter handeln, der applikationsspezifisch, gefahrenunabhängig und/oder zertifizierungsfrei ist. Für diese Art von Konfigurationsparameter lassen sich die oben beschriebenen Vorteile der Software-Kennung, insbesondere die große mögliche Datenmenge, vorteilhaft ausnutzen. Der zweite Konfigurationsparameter kann grundsätzlich gerätespezifisch oder geräteunspezifisch sein.
- Zum Beispiel kann die Hardware-Kennung durch wenigstens einen Kennwiderstand, insbesondere eine Kennwiderstandskombination, und/oder durch wenigstens ein, von der Steuerungsvorrichtung erkennbares, mechanisches Merkmal gebildet sein. Dies sind einfache Mittel zur Realisierung einer permanenten Hardware-Kennung.
- Technische Mittel zur Erkennung mechanischer Merkmale einer Gerätekomponente durch eine Steuerungsvorrichtung sind zum Beispiel in der
EP 3 536 966 A1 beschrieben. Die Steuerungsvorrichtung kann beispielsweise eine Sensorik zur Erkennung der mechanischen Merkmale umfassen, beispielsweise eine Lichtschranke, einen Kapazitätssensor und/oder einen Induktivitätssensor. Denkbar ist auch, dass ein mechanisches Merkmal eine Leitfähigkeit herstellt, die als Information erkannt wird. Dabei kann das mechanische Merkmal beispielsweise selbst leiten oder einen Tastschalter betätigen. Allgemeiner kann es vorgesehen sein, dass durch das Anschließen eine Zustandsveränderung der Steuerungsvorrichtung zur Festlegung des ersten Konfigurationsparameters erzeugt wird. Die Zustandsveränderung kann grundsätzlich reversibel oder irreversibel sein. Im irreversiblen Fall ist die Steuerungsvorrichtung anschließend auf eine bestimmte Hardware-Kennung, insbesondere auf die konkrete Art der angeschlossenen Gerätekomponente beschränkt. - Der nichtflüchtige Speicher kann beispielsweise als PROM, EPROM, EEPROM, Flashspeicher und/oder Magnetspeicher ausgebildet sein.
- Das Vorsehen der Software-Kennung kann beispielsweise durch Programmierung des nichtflüchtigen Speichers über einen Programmieradapter erfolgen. Alternativ oder grundsätzlich auch zusätzlich kann die Steuerungsvorrichtung beispielsweise selbst als Mittel zur Programmierung des nichtflüchtigen Speichers ausgebildet sein. Dabei kann die Steuerungsvorrichtung beispielsweise eine zusätzliche Schnittstelle und Mittel zur Weiterleitung der zu programmierende Informationen zu dem nichtflüchtigen Speicher über die Schnittstelle, welche die Steuerungsvorrichtung mit der Gerätekomponenten verbindet, aufweisen.
- Gemäß einer Ausführungsform ist vorgesehen, dass die Schnittstelle eine Steckverbindung umfasst. Dies ermöglicht eine einfache Verbindung der Steuerungsvorrichtung mit der Gerätekomponente und vereinfacht den Austausch der Steuerungsvorrichtung.
- Bei einer Weiterbildung ist an der Gerätekomponente ein Kennungsmodul vorgesehen ist, welches die Hardware- und/oder die Software-Kennung umfasst. Dies ermöglicht einen vereinfachten Zusammenbau der Gerätekomponente. Das Kennungsmodul kann bevorzugt austauschbar und/oder an einer Außenseite der Gerätekomponente vorgesehen sein. Beispielsweise kann das Kennungsmodul als Platine ausgebildet sein, die bevorzugt auch einen Steckverbinder der Schnittstelle aufweisen kann. Die Platine kann beispielsweise durch Schrauben befestigt sein, etwa an einer Gehäusekomponente der Gerätekomponente. Die Platine kann beispielsweise durch einen Servicemitarbeiter ausgetauscht werden, wenn sie defekt ist und/oder die Gerätekomponente in einer neuen Applikation zum Einsatz kommen soll. Alternativ oder zusätzlich kann ein Servicemitarbeiter die Software-Kennung auch neu programmieren, sofern die Software-Kennung bzw. der nichtflüchtige Speicher hierzu eingerichtet ist.
- Gemäß einem vorteilhaften Beispiel ist vorgesehen, dass die Steuerungsvorrichtung für den ersten und/oder zweiten Konfigurationsparameter eine vordefinierte Tabelle umfasst, welche eine Zuordnung von Werten für den Konfigurationsparameter zu unterschiedlichen Kennungswerten umfasst, und dass der erste bzw. zweite Konfigurationsparameter durch die Steuerungsvorrichtung auf Basis der Tabelle festlegbar ist. Demnach sind also Konfigurationsparameter oder -sätze als in der Steuerungsvorrichtung vordefinierte Tabellen in Abhängigkeit von existenten Kennungen abgelegt. Hierüber ist insbesondere eine einfache Zulässigkeitsprüfung seitens der Steuerungsvorrichtung möglich. Ferner lässt sich über eine Tabelle insbesondere eine Zuordenbarkeit für Dritte von Konfigurationsparameter zu Kennungen erschweren.
- Grundsätzlich ist zum Beispiel auch eine direkte Kodierung wenigstens eines Konfigurationsparameters bzw. eines Wertes für den Konfigurationsparameter in einer Kennung möglich. So kann zum Beispiel eine Kennung einen Zahlenwert aufweisen. Der Zahlenwert ist dann entsprechend der Art der Kennung kodiert.
- Bei einigen Ausführungsformen umfasst wenigstens eine der Kennungen, insbesondere die Software-Kennung, eine Produktbezeichnung und/oder eine Artikelnummer der Gerätekomponente. Dies ist eine einfache Möglichkeit zur spezifischen Kennzeichnung der Gerätekomponente.
- Bei einem vorteilhaften Beispiel umfasst wenigstens eine Kennung, insbesondere die Software-Kennung, eine Prüfinformation, insbesondere eine Prüfsumme. Durch die Prüfinformation lässt sich die Validität der Kennung auf einfache Weise überprüfen und es kann eine falsche Festlegung von Konfigurationsparametern vermieden werden. Die Prüfinformation bildet somit ein weiteres Sicherheitsmerkmal.
- Bevorzugt ist es vorgesehen, dass die Hardware-Kennung und die Software-Kennung jeweils so ausgebildet sind, dass sie von einer unberechtigten Person, wie etwa einem Anwender, zumindest im Wesentlichen nicht in zulässiger Weise veränderbar ist. Hierdurch wird die Sicherheit weiter erhöht, weil es der unberechtigten Person verwehrt wird, möglicherweise falsche Konfigurationsparameter über falsche Kennungen festzulegen. "Nicht zulässig" bedeutet in diesem Zusammenhang, dass die Steuerungsvorrichtung erkennt, dass die betreffende Kennung nicht vom Hersteller oder ggf. einer autorisierten Service-Stelle festgelegt wurde. Es kann auch vorgesehen sein, dass die Hardware-Kennung und die Software-Kennung von einer unberechtigten Person, wie etwa einem Anwender, zumindest im Wesentlichen nicht veränderbar ist - also weder in zulässiger noch in unzulässiger Weise. Die Software-Kennung kann alternativ z.B. durch eine autorisierte Person in zulässiger Weise veränderbar sein.
- Eine vorteilhafte Weiterbildung sieht vor, dass wenigstens eine der Kennungen, insbesondere die Software-Kennung, verschlüsselt ist. Die Kennung kann bevorzugt zumindest im Wesentlichen pseudozufällig und/oder zufallsresistent sein. Dies bedeutet, dass die Kennung für einen Dritten wie zufällig erscheint bzw. das eine andere zulässige Kennung durch schlichtes Probieren zumindest im Wesentlichen nicht auffindbar ist. Insbesondere sollen keine direkten Rückschlüsse von der Kennung auf eine Artikelnummer und/oder die Konfigurationsparameter der Gerätekomponente möglich sein. Eine einfache Möglichkeit besteht darin, dass die Kennung mittels einer hash-Funktion erzeugt wird, wobei die hash-Funktion zum Beispiel eine Produktbezeichnung, eine Artikelnummer und/oder direkt definierte Konfigurationsparameter als Eingabewerte verwendet. Die beschriebenen Maßnahmen dienen insbesondere dazu, dass die Kennung, insbesondere die Software-Kennung, nicht durch den Anwender des Vakuumgeräts verändert werden kann, also nicht in einer Art, die von der Steuerungsvorrichtung als zulässig erachtet wird. Durch die Maßnahmen ist es nur erschwert möglich, fehlerhafterweise, etwa per Durchprobieren, einen gültigen Konfigurationsparametersatz ohne Bezug zur tatsächlich vorhandenen Pumpe einzustellen, sodass die Auswahl eines falschen Konfigurationsparametersatzes weiter erschwert wird. Die Steuerungsvorrichtung kann anhand der bei der Herstellung definierten Kennung gleichwohl, z.B. per entsprechender Umrechnung oder Abbildung, auf den gewählten Satz an Konfigurationsparametern schließen. Die Steuerungsvorrichtung kann zu diesem Zweck beispielsweise eine vordefinierte Entschlüsselungsfunktion und/oder eine vordefinierte Tabelle aufweisen.
- Besonders bevorzugt ist es, wenn die Steuerungsvorrichtung dazu eingerichtet ist, den Betrieb der Gerätekomponente zu unterbinden, wenn keine zulässige Hardware-Kennung erkennbar ist. Somit lässt sich auf einfache Weise sicherstellen, dass die Gerätekomponente nicht auf unzulässige Weise und insbesondere nicht auf gefährliche Weise betrieben wird. Grundsätzlich ist es auch denkbar, dass der Betrieb der Gerätekomponente lediglich eingeschränkt wird, wenn keine zulässige Hardware-Kennung erkennbar ist.
- Ebenso ist es möglich, den Betrieb zu unterbinden oder einzuschränken, wenn keine zulässige Software-Kennung erkennbar ist. Bevorzugt ist es, wenn die Steuerungsvorrichtung dazu eingerichtet ist, bis zu einer erfolgten Erkennung einer zulässigen Software-Kennung den Betrieb und/oder bestimmte Funktionalitäten der Gerätekomponente teilweise oder vollständig zu unterbinden. Wenn der über die Software-Kennung festgelegte, zweite Konfigurationsparameter beispielsweise nicht sicherheitsrelevant ist, kann also der Betrieb oder können bestimmte Funktionalitäten der Gerätekomponente ermöglicht werden, auch wenn keine zulässige Software-Kennung erkannt wurde. Insbesondere kann es aber Vorrausetzung sein, dass eine zulässige Hardware-Kennung erkannt wurde.
- Gemäß einer Ausführungsform ist vorgesehen, dass die Steuerungsvorrichtung dazu eingerichtet ist, bis zu einer erfolgten Erkennung einer zulässigen Software-Kennung einen Betrieb auf Grundlage zumindest eines voreingestellten Wertes für den zweiten Konfigurationsparameter zu veranlassen. Somit kann auf einfache Weise ein Betrieb der Gerätekomponente ermöglicht werden, auch wenn keine Software-Kennung erkennbar ist. Auch hier kann es insbesondere aber Voraussetzung sein, dass eine zulässige Hardware-Kennung erkannt wurde.
- Die Aufgabe der Erfindung wird auch gelöst durch ein Vakuumgerät nach dem hierauf gerichteten, unabhängigen Anspruch. Dieses umfasst eine Gerätekomponente, insbesondere eine Pumpkomponente, eine Steuerungsvorrichtung, insbesondere ein Antriebsgerät, für die Gerätekomponente, und eine Schnittstelle zur Verbindung der Steuerungsvorrichtung mit der Gerätekomponente, wobei die Steuerungsvorrichtung dazu eingerichtet ist, die Gerätekomponente auf Basis wenigstens eines ersten Konfigurationsparameters und eines zweiten Konfigurationsparameters zu steuern, wobei an der Gerätekomponente eine permanente Hardware-Kennung vorgesehen ist und die Steuerungsvorrichtung zur Erkennung der Hardware-Kennung und Festlegung des ersten Konfigurationsparameters auf Basis der Hardware-Kennung eingerichtet ist, wobei an der Gerätekomponente eine Software-Kennung in einem nichtflüchtigen Speicher vorgesehen ist und die Steuerungsvorrichtung zur Erkennung der Software-Kennung und zur Festlegung des zweiten Konfigurationsparameters auf Basis der Software-Kennung eingerichtet ist, sodass durch die Steuerungseinrichtung im mit der Gerätekomponente verbundenen Zustand sowohl der erste als auch der zweite Konfigurationsparameter selbsttätig festlegbar ist.
- Die Software-Kennung kann insbesondere herstellerseitig definiert sein. Insbesondere kann es vorgesehen sein, dass das Vakuumgerät keine Benutzerschnittstelle aufweist, die eine Veränderung der Software-Kennung ermöglicht. Allgemein bevorzugt können Mittel und/oder Maßnahmen zur Verhinderung und/oder Erschwerung einer nachträglichen Änderung der Software-Kennung vorgesehen sein.
- Als Vakuumgerät sind generell Vorrichtungen anzusehen, die ein Vakuum umfassen, ein Vakuum erzeugen oder zum Einsatz in einem Vakuum ausgebildet sind. Bei einem Vakuumgerät kann es sich beispielsweise um eine Vakuumpumpe, eine Vakuumkammer, ein Mess- und/oder Analysegerät, ein Lecksuchgerät, ein Leitelement, ein Ventil, eine Vakuumdurchführung oder einen Manipulator handeln. Ein Leitelement ist ein Element zur Leitung eines Gasstromes bzw. eines Vakuums. Eine Vakuumdurchführung ermöglicht die Durchführung von Energie und/oder Informationen zwischen einem Vakuumbereich und einem von dem Vakuumbereich getrennten Bereich, wie einem Druck- oder Atmosphärenbereich. Ein Manipulator ist eine Vorrichtung zur Übertragung einer Bewegung von einem Druck- oder Atmosphärenbereich in einen Vakuumbereich. Weitere, insbesondere komplexere, Beispiele für Vakuumgeräte umfassen ein Massenspektrometer oder ein Elektronenmikroskop. Ferner kann ein Vakuumgerät auch Kombinationen der vorstehenden Vorrichtungen umfassen.
- Die vorliegende Idee greift insbesondere die eingangs erläuterten Möglichkeiten zur Festlegung von Konfigurationsparametern, nämlich die Festlegung anhand von Kennungen einerseits und die manuelle Eingabe andererseits, auf und kombiniert sie in vorteilhafter Weise. Insbesondere wird dies erreicht, indem die sicherheitsrelevanten und zertifizierten Teile der Konfigurationsparameter, insbesondere Nenn- bzw. Maximaldrehzahl, nach wie vor per Hardware-Kennung, insbesondere per Kennwiderstandskombination, erkannt werden. Die Anzahl und Abstufung von Kennwiderständen kann dabei sinnvoll gewählt werden. Die Erkennung und Festlegung der genannten Konfigurationsparameter kann aber auch durch andere Merkmale erfolgen, z.B. durch Erkennung mechanischer Gegebenheiten an der Pumpe durch die Antriebselektronik. Die Anzahl der unterschiedlichen Nenndrehzahlen ist gegenüber der Anzahl anderer Konfigurationsparameter wesentlich geringer und deren zukünftiger Zuwachs absehbar. Die genannten sicherheitsrelevanten und zertifizierten Konfigurationsparameter können des Weiteren durch freie Zuordnung definiert werden. Dabei wird z.B. eine hinterlegte bekannte Kombination an Kennwiderständen oder Mustern einer frei gewählten Nenndrehzahl zugeordnet. Alternativ oder zusätzlich können die Konfigurationsparameter aber z.B. auch durch eine Abbildungsvorschrift abgeleitet werden. Beispielsweise kann der detektierte Kennwiderstand durch ein bekanntes Verhältnis direkt in eine Nenndrehzahl umgerechnet werden. Dies kann z.B. durch lineare Zuordnung, Rundung, Aufspreizung, Offset oder sonstige eindeutige Umrechnungen und mathematischen Abbildungen kontinuierlich oder in definierten Abstufungen erfolgen.
- Die restlichen, insbesondere zweiten, Konfigurationsparameter werden als zugeordnete Sätze in der Steuerungsvorrichtung, insbesondere im Antriebsgerät, fest vorgehalten, und aus diesen Sätzen kann dann, insbesondere während der Herstellung, geeignet ausgewählt werden, insbesondere durch entsprechende Programmierung der Software-Kennung. Die Steuerungsvorrichtung erkennt dann durch Auswertung der Kennwiderstände oder andere genannte Verfahren die sicherheitsrelevanten, insbesondere ersten, Konfigurationsparameter der Gerätekomponente, insbesondere der Pumpe, z.B. eine bestimmte Nenn- oder Maximaldrehzahl. Sofern nicht im Vorfeld bereits eine Festlegung getroffen wurde, stehen ein oder mehrere Sätze der restlichen, insbesondere zweiten, Konfigurationsparameter zur Verfügung. Diese können nun mit einer einfachen Kennung - im einfachsten Fall ein Index, besser jedoch abgesichert per Prüfsumme - ausgewählt werden, praktischerweise einmal bei Fertigung oder im Servicefall. Die Auswahl kann beispielsweise durch Angabe der Artikelnummer der Gerätekomponente erfolgen, aber auch durch jede andere Art der Kennung. Vorteilhafterweise kann aber auch eine Zahl verwendet werden, die keine direkten Rückschlüsse auf die Artikelnummer der Gerätekomponente erlaubt, sondern z.B. entweder als eine Art hash-Code gebildet oder einer Tabelle entnommen werden muss. Auf diese Weise ist es nur erschwert möglich, fehlerhafterweise per Durchprobieren einen gültigen Satz von Konfigurationsparametern ohne Bezug zur tatsächlich vorhandenen Gerätekomponente einzustellen, sodass die Auswahl eines falschen Konfigurationsparametersatzes weiter erschwert wird. Die Steuerungsvorrichtung kann aus dieser Angabe per entsprechender Umrechnung oder Abbildung auf den gewählten Satz an Konfigurationsparametern schließen. Die Auswahl erfolgt im Idealfall nur einmal und wird nichtflüchtig in der Gerätekomponente vorgehalten. Bei Tausch einer Steuerungsvorrichtung an einer solchen Gerätekomponente erkennt erstere durch die Kennwiderstände den festzulegenden, ersten Konfigurationsparameter, insbesondere die Nenndrehzahl, und durch Auslesen des nichtflüchtigen Speichers den gewählten, zweiten Konfigurationsparametersatz.
- Sofern eine Steuerungsvorrichtung die sicherheitsrelevanten Teile der Konfigurationsparameter erkannt hat, jedoch noch keine Auswahl der restlichen Parameter erfolgt ist, können verschiedene Maßnahmen ergriffen werden. Dies kann unter anderem das vollständige oder teilweise Unterbinden von Funktionen der Gerätekomponente sein, insbesondere des Betriebs der Gerätekomponente oder auch die Ansteuerung von Zubehör oder die Kommunikation mit anderen Komponenten oder Kommunikationsteilnehmern. Es kann aber auch eine Art Default-Konfigurationsparametersatz gewählt werden. Dies kann einer der für verschiedene Gerätekomponenten hinterlegten Sätze sein, aber auch ein spezieller, allein für diesen Fall definierter Satz. Hierbei kann entweder der jeweils sicherste der einzelnen Konfigurationsparameter gewählt werden oder aber ein anderer durch die Anwendung bestimmter, geeigneter Wert.
- Die beschriebenen Maßnahmen bringen zahlreiche Vorteile mit sich. Durch das beschriebene Verfahren kann die Anzahl der applikations- und gerätespezifischen Konfigurationsparametersätze unabhängig von der möglichen Anzahl an Kombinationen der Kennwiderstände erweitert werden. Die Parametersätze selber können durch Vordefinition in der Steuerungsvorrichtung nur gültige und sinnvolle Werte annehmen, deren Auswahl ist mit einfachen Mitteln möglich.
- Nachfolgend wird die Erfindung beispielhaft anhand vorteilhafter Ausführungsformen unter Bezugnahme auf die beigefügten Figuren beschrieben. Es zeigen, jeweils schematisch:
- Fig. 1
- eine perspektivische Ansicht einer Turbomolekularpumpe,
- Fig. 2
- eine Ansicht der Unterseite der Turbomolekularpumpe von
Fig. 1 , - Fig. 3
- einen Querschnitt der Turbomolekularpumpe längs der in
Fig. 2 gezeigten Schnittlinie A-A, - Fig. 4
- eine Querschnittsansicht der Turbomolekularpumpe längs der in
Fig. 2 gezeigten Schnittlinie B-B, - Fig. 5
- eine Querschnittsansicht der Turbomolekularpumpe längs der in
Fig. 2 gezeigten Schnittlinie C-C, - Fig. 6
- ein Vakuumgerät umfassend eine Gerätekomponente und eine Steuerungsvorrichtung für die Gerätekomponente.
- Die in
Fig. 1 gezeigte Turbomolekularpumpe 111 umfasst einen von einem Einlassflansch 113 umgebenen Pumpeneinlass 115, an welchen in an sich bekannter Weise ein nicht dargestellter Rezipient angeschlossen werden kann. Das Gas aus dem Rezipienten kann über den Pumpeneinlass 115 aus dem Rezipienten gesaugt und durch die Pumpe hindurch zu einem Pumpenauslass 117 gefördert werden, an den eine Vorvakuumpumpe, wie etwa eine Drehschieberpumpe, angeschlossen sein kann. - Der Einlassflansch 113 bildet bei der Ausrichtung der Vakuumpumpe gemäß
Fig. 1 das obere Ende des Gehäuses 119 der Vakuumpumpe 111. Das Gehäuse 119 umfasst ein Unterteil 121, an welchem seitlich ein Elektronikgehäuse 123 angeordnet ist. In dem Elektronikgehäuse 123 sind elektrische und/oder elektronische Komponenten der Vakuumpumpe 111 untergebracht, z.B. zum Betreiben eines in der Vakuumpumpe angeordneten Elektromotors 125 (vgl. auchFig. 3 ). Am Elektronikgehäuse 123 sind mehrere Anschlüsse 127 für Zubehör vorgesehen. Außerdem sind eine Datenschnittstelle 129, z.B. gemäß dem RS485-Standard, und ein Stromversorgungsanschluss 131 am Elektronikgehäuse 123 angeordnet. - Es existieren auch Turbomolekularpumpen, die kein derartiges angebrachtes Elektronikgehäuse aufweisen, sondern an eine externe Antriebselektronik angeschlossen werden.
- Am Gehäuse 119 der Turbomolekularpumpe 111 ist ein Fluteinlass 133, insbesondere in Form eines Flutventils, vorgesehen, über den die Vakuumpumpe 111 geflutet werden kann. Im Bereich des Unterteils 121 ist ferner noch ein Sperrgasanschluss 135, der auch als Spülgasanschluss bezeichnet wird, angeordnet, über welchen Spülgas zum Schutz des Elektromotors 125 (siehe z.B.
Fig. 3 ) vor dem von der Pumpe geförderten Gas in den Motorraum 137, in welchem der Elektromotor 125 in der Vakuumpumpe 111 untergebracht ist, eingelassen werden kann. Im Unterteil 121 sind ferner noch zwei Kühlmittelanschlüsse 139 angeordnet, wobei einer der Kühlmittelanschlüsse als Einlass und der andere Kühlmittelanschluss als Auslass für Kühlmittel vorgesehen ist, das zu Kühlzwecken in die Vakuumpumpe geleitet werden kann. Andere existierende Turbomolekularvakuumpumpen (nicht dargestellt) werden ausschließlich mit Luftkühlung betrieben. - Die untere Seite 141 der Vakuumpumpe kann als Standfläche dienen, sodass die Vakuumpumpe 111 auf der Unterseite 141 stehend betrieben werden kann. Die Vakuumpumpe 111 kann aber auch über den Einlassflansch 113 an einem Rezipienten befestigt werden und somit gewissermaßen hängend betrieben werden. Außerdem kann die Vakuumpumpe 111 so gestaltet sein, dass sie auch in Betrieb genommen werden kann, wenn sie auf andere Weise ausgerichtet ist als in
Fig. 1 gezeigt ist. Es lassen sich auch Ausführungsformen der Vakuumpumpe realisieren, bei der die Unterseite 141 nicht nach unten, sondern zur Seite gewandt oder nach oben gerichtet angeordnet werden kann. Grundsätzlich sind dabei beliebige Winkel möglich. - Andere existierende Turbomolekularvakuumpumpen (nicht dargestellt), die insbesondere größer sind als die hier dargestellte Pumpe, können nicht stehend betrieben werden.
- An der Unterseite 141, die in
Fig. 2 dargestellt ist, sind noch diverse Schrauben 143 angeordnet, mittels denen hier nicht weiter spezifizierte Bauteile der Vakuumpumpe aneinander befestigt sind. Beispielsweise ist ein Lagerdeckel 145 an der Unterseite 141 befestigt. - An der Unterseite 141 sind außerdem Befestigungsbohrungen 147 angeordnet, über welche die Pumpe 111 beispielsweise an einer Auflagefläche befestigt werden kann. Dies ist bei anderen existierenden Turbomolekularvakuumpumpen (nicht dargestellt), die insbesondere größer sind als die hier dargestellte Pumpe, nicht möglich.
- In den
Figuren 2 bis 5 ist eine Kühlmittelleitung 148 dargestellt, in welcher das über die Kühlmittelanschlüsse 139 ein- und ausgeleitete Kühlmittel zirkulieren kann. - Wie die Schnittdarstellungen der
Figuren 3 bis 5 zeigen, umfasst die Vakuumpumpe mehrere Prozessgaspumpstufen zur Förderung des an dem Pumpeneinlass 115 anstehenden Prozessgases zu dem Pumpenauslass 117. - In dem Gehäuse 119 ist ein Rotor 149 angeordnet, der eine um eine Rotationsachse 151 drehbare Rotorwelle 153 aufweist.
- Die Turbomolekularpumpe 111 umfasst mehrere pumpwirksam miteinander in Serie geschaltete turbomolekulare Pumpstufen mit mehreren an der Rotorwelle 153 befestigten radialen Rotorscheiben 155 und zwischen den Rotorscheiben 155 angeordneten und in dem Gehäuse 119 festgelegten Statorscheiben 157. Dabei bilden eine Rotorscheibe 155 und eine benachbarte Statorscheibe 157 jeweils eine turbomolekulare Pumpstufe. Die Statorscheiben 157 sind durch Abstandsringe 159 in einem gewünschten axialen Abstand zueinander gehalten.
- Die Vakuumpumpe umfasst außerdem in radialer Richtung ineinander angeordnete und pumpwirksam miteinander in Serie geschaltete Holweck-Pumpstufen. Es existieren andere Turbomolekularvakuumpumpen (nicht dargestellt), die keine Holweck-Pumpstufen aufweisen.
- Der Rotor der Holweck-Pumpstufen umfasst eine an der Rotorwelle 153 angeordnete Rotornabe 161 und zwei an der Rotornabe 161 befestigte und von dieser getragene zylindermantelförmige Holweck-Rotorhülsen 163, 165, die koaxial zur Rotationsachse 151 orientiert und in radialer Richtung ineinander geschachtelt sind. Ferner sind zwei zylindermantelförmige Holweck-Statorhülsen 167, 169 vorgesehen, die ebenfalls koaxial zu der Rotationsachse 151 orientiert und in radialer Richtung gesehen ineinander geschachtelt sind.
- Die pumpaktiven Oberflächen der Holweck-Pumpstufen sind durch die Mantelflächen, also durch die radialen Innen- und/oder Außenflächen, der Holweck-Rotorhülsen 163, 165 und der Holweck-Statorhülsen 167, 169 gebildet. Die radiale Innenfläche der äußeren Holweck-Statorhülse 167 liegt der radialen Außenfläche der äußeren Holweck-Rotorhülse 163 unter Ausbildung eines radialen Holweck-Spalts 171 gegenüber und bildet mit dieser die der Turbomolekularpumpen nachfolgende erste Holweck-Pumpstufe. Die radiale Innenfläche der äußeren Holweck-Rotorhülse 163 steht der radialen Außenfläche der inneren Holweck-Statorhülse 169 unter Ausbildung eines radialen Holweck-Spalts 173 gegenüber und bildet mit dieser eine zweite Holweck-Pumpstufe. Die radiale Innenfläche der inneren Holweck-Statorhülse 169 liegt der radialen Außenfläche der inneren Holweck-Rotorhülse 165 unter Ausbildung eines radialen Holweck-Spalts 175 gegenüber und bildet mit dieser die dritte Holweck-Pumpstufe.
- Am unteren Ende der Holweck-Rotorhülse 163 kann ein radial verlaufender Kanal vorgesehen sein, über den der radial außenliegende Holweck-Spalt 171 mit dem mittleren Holweck-Spalt 173 verbunden ist. Außerdem kann am oberen Ende der inneren Holweck-Statorhülse 169 ein radial verlaufender Kanal vorgesehen sein, über den der mittlere Holweck-Spalt 173 mit dem radial innenliegenden Holweck-Spalt 175 verbunden ist. Dadurch werden die ineinander geschachtelten Holweck-Pumpstufen in Serie miteinander geschaltet. Am unteren Ende der radial innenliegenden Holweck-Rotorhülse 165 kann ferner ein Verbindungskanal 179 zum Auslass 117 vorgesehen sein.
- Die vorstehend genannten pumpaktiven Oberflächen der Holweck-Statorhülsen 167, 169 weisen jeweils mehrere spiralförmig um die Rotationsachse 151 herum in axialer Richtung verlaufende Holweck-Nuten auf, während die gegenüberliegenden Mantelflächen der Holweck-Rotorhülsen 163, 165 glatt ausgebildet sind und das Gas zum Betrieb der Vakuumpumpe 111 in den Holweck-Nuten vorantreiben.
- Zur drehbaren Lagerung der Rotorwelle 153 sind ein Wälzlager 181 im Bereich des Pumpenauslasses 117 und ein Permanentmagnetlager 183 im Bereich des Pumpeneinlasses 115 vorgesehen.
- Im Bereich des Wälzlagers 181 ist an der Rotorwelle 153 eine konische Spritzmutter 185 mit einem zu dem Wälzlager 181 hin zunehmenden Außendurchmesser vorgesehen. Die Spritzmutter 185 steht mit mindestens einem Abstreifer eines Betriebsmittelspeichers in gleitendem Kontakt. Bei anderen existierenden Turbomolekularvakuumpumpen (nicht dargestellt) kann anstelle einer Spritzmutter eine Spritzschraube vorgesehen sein. Da somit unterschiedliche Ausführungen möglich sind, wird in diesem Zusammenhang auch der Begriff "Spritzspitze" verwendet.
- Der Betriebsmittelspeicher umfasst mehrere aufeinander gestapelte saugfähige Scheiben 187, die mit einem Betriebsmittel für das Wälzlager 181, z.B. mit einem Schmiermittel, getränkt sind.
- Im Betrieb der Vakuumpumpe 111 wird das Betriebsmittel durch kapillare Wirkung von dem Betriebsmittelspeicher über den Abstreifer auf die rotierende Spritzmutter 185 übertragen und in Folge der Zentrifugalkraft entlang der Spritzmutter 185 in Richtung des größer werdenden Außendurchmessers der Spritzmutter 185 zu dem Wälzlager 181 hin gefördert, wo es z.B. eine schmierende Funktion erfüllt. Das Wälzlager 181 und der Betriebsmittelspeicher sind durch einen wannenförmigen Einsatz 189 und den Lagerdeckel 145 in der Vakuumpumpe eingefasst.
- Das Permanentmagnetlager 183 umfasst eine rotorseitige Lagerhälfte 191 und eine statorseitige Lagerhälfte 193, welche jeweils einen Ringstapel aus mehreren in axialer Richtung aufeinander gestapelten permanentmagnetischen Ringen 195, 197 umfassen. Die Ringmagnete 195, 197 liegen einander unter Ausbildung eines radialen Lagerspalts 199 gegenüber, wobei die rotorseitigen Ringmagnete 195 radial außen und die statorseitigen Ringmagnete 197 radial innen angeordnet sind. Das in dem Lagerspalt 199 vorhandene magnetische Feld ruft magnetische Abstoßungskräfte zwischen den Ringmagneten 195, 197 hervor, welche eine radiale Lagerung der Rotorwelle 153 bewirken. Die rotorseitigen Ringmagnete 195 sind von einem Trägerabschnitt 201 der Rotorwelle 153 getragen, welcher die Ringmagnete 195 radial außenseitig umgibt. Die statorseitigen Ringmagnete 197 sind von einem statorseitigen Trägerabschnitt 203 getragen, welcher sich durch die Ringmagnete 197 hindurch erstreckt und an radialen Streben 205 des Gehäuses 119 aufgehängt ist. Parallel zu der Rotationsachse 151 sind die rotorseitigen Ringmagnete 195 durch ein mit dem Trägerabschnitt 201 gekoppeltes Deckelelement 207 festgelegt. Die statorseitigen Ringmagnete 197 sind parallel zu der Rotationsachse 151 in der einen Richtung durch einen mit dem Trägerabschnitt 203 verbundenen Befestigungsring 209 sowie einen mit dem Trägerabschnitt 203 verbundenen Befestigungsring 211 festgelegt. Zwischen dem Befestigungsring 211 und den Ringmagneten 197 kann außerdem eine Tellerfeder 213 vorgesehen sein.
- Innerhalb des Magnetlagers ist ein Not- bzw. Fanglager 215 vorgesehen, welches im normalen Betrieb der Vakuumpumpe 111 ohne Berührung leer läuft und erst bei einer übermäßigen radialen Auslenkung des Rotors 149 relativ zu dem Stator in Eingriff gelangt, um einen radialen Anschlag für den Rotor 149 zu bilden, damit eine Kollision der rotorseitigen Strukturen mit den statorseitigen Strukturen verhindert wird. Das Fanglager 215 ist als ungeschmiertes Wälzlager ausgebildet und bildet mit dem Rotor 149 und/oder dem Stator einen radialen Spalt, welcher bewirkt, dass das Fanglager 215 im normalen Pumpbetrieb außer Eingriff ist. Die radiale Auslenkung, bei der das Fanglager 215 in Eingriff gelangt, ist groß genug bemessen, sodass das Fanglager 215 im normalen Betrieb der Vakuumpumpe nicht in Eingriff gelangt, und gleichzeitig klein genug, sodass eine Kollision der rotorseitigen Strukturen mit den statorseitigen Strukturen unter allen Umständen verhindert wird.
- Die Vakuumpumpe 111 umfasst den Elektromotor 125 zum drehenden Antreiben des Rotors 149. Der Anker des Elektromotors 125 ist durch den Rotor 149 gebildet, dessen Rotorwelle 153 sich durch den Motorstator 217 hindurch erstreckt. Auf den sich durch den Motorstator 217 hindurch erstreckenden Abschnitt der Rotorwelle 153 kann radial außenseitig oder eingebettet eine Permanentmagnetanordnung angeordnet sein. Zwischen dem Motorstator 217 und dem sich durch den Motorstator 217 hindurch erstreckenden Abschnitt des Rotors 149 ist ein Zwischenraum 219 angeordnet, welcher einen radialen Motorspalt umfasst, über den sich der Motorstator 217 und die Permanentmagnetanordnung zur Übertragung des Antriebsmoments magnetisch beeinflussen können.
- Der Motorstator 217 ist in dem Gehäuse innerhalb des für den Elektromotor 125 vorgesehenen Motorraums 137 festgelegt. Über den Sperrgasanschluss 135 kann ein Sperrgas, das auch als Spülgas bezeichnet wird, und bei dem es sich beispielsweise um Luft oder um Stickstoff handeln kann, in den Motorraum 137 gelangen. Über das Sperrgas kann der Elektromotor 125 vor Prozessgas, z.B. vor korrosiv wirkenden Anteilen des Prozessgases, geschützt werden. Der Motorraum 137 kann auch über den Pumpenauslass 117 evakuiert werden, d.h. im Motorraum 137 herrscht zumindest annäherungsweise der von der am Pumpenauslass 117 angeschlossenen Vorvakuumpumpe bewirkte Vakuumdruck.
- Zwischen der Rotornabe 161 und einer den Motorraum 137 begrenzenden Wandung 221 kann außerdem eine sog. und an sich bekannte Labyrinthdichtung 223 vorgesehen sein, insbesondere um eine bessere Abdichtung des Motorraums 217 gegenüber den radial außerhalb liegenden Holweck-Pumpstufen zu erreichen.
- In
Fig. 6 ist ein Vakuumgerät 250 gezeigt, welches eine Gerätekomponente 252 und eine Steuerungsvorrichtung 254 zur Steuerung der Gerätekomponente 252 umfasst. Die Gerätekomponente 252 und die Steuerungsvorrichtung 254 sind über eine Schnittstelle 256 verbindbar und inFig. 6 im getrennten Zustand gezeigt. Um die Gerätekomponente 252 in Betrieb zu nehmen, muss die Steuerungsvorrichtung 254 über die Schnittstelle 256 mit der Gerätekomponente 252 verbunden werden. Bei der Schnittstelle 256 handelt es sich um eine Steckverbindung, d. h. die Steuerungsvorrichtung 254 braucht lediglich an die Gerätekomponente 252 angesteckt und bevorzugt zusätzlich befestigt zu werden. - Die Gerätekomponente 252 umfasst hier beispielhaft eine Pumpeinheit 258. Diese kann im Hinblick auf die pumpaktiven Komponenten insbesondere entsprechend der oben beschriebenen und in den
Fig. 1 bis 5 gezeigten Turbomolekularpumpe 111 ausgebildet sein. - Die Gerätekomponente 252 umfasst außerdem eine Hardware-Kennung 260 und eine Software-Kennung 262. Die Hardware-Kennung 260 ist zum Beispiel als Kennwiderstandskombination ausgebildet, während die Software-Kennung 262 in einem nichtflüchtigen Speicher 263 hinterlegt ist.
- Die Hardware-Kennung 260 und die Software-Kennung 262 sind an einem Kennungsmodul 264 angeordnet, welches zum Beispiel vom Hersteller nachträglich austauschbar sein kann.
- Die Gerätekomponente 252 kann beispielsweise eine Pumpkomponente bilden, beispielsweise diejenige der in den
Fig. 1 bis 5 gezeigten Turbomolekularpumpe 111. Diese Pumpkomponente umfasst insbesondere das Gehäuse 119, das Unterteil 121 und die innerhalb dieser beiden Elemente angeordneten Bauteile. Ferner umfasst die Pumpkomponente der Turbomolekularpumpe 111 ein Kennungsmodul 264, welches inFig. 3 gekennzeichnet ist. Das Kennungsmodul 264 ist als eine Platine ausgebildet, die sowohl die Hardware-Kennung in Form einer Kennwiderstandskombination als auch die Software-Kennung in einem nichtflüchtigen Speicher trägt. Ferner umfasst in diesem Beispiel die Platine einen Steckverbinder, der den gerätekomponentenseitigen Teil einer Schnittstelle 256 zum Anschluss einer Steuerungsvorrichtung bildet. Weiter mit Bezug aufFig. 3 ist die Steuerungsvorrichtung für die Gerätekomponente im Elektronikgehäuse 123 untergebracht. Die Steuerungsvorrichtung umfasst einen Steckverbinder, der zu demjenigen der Gerätekomponente korrespondiert und den steuerungsvorrichtungsseitigen Teil der Schnittstelle 256 bildet. - In der Steuerungsvorrichtung 254 der
Fig. 6 sind eine Mehrzahl an Konfigurationsparametern 268, welche einzeln durch laufende Nummern in Bezug genommen werden, vorgesehen. Die Steuerungsvorrichtung 254 umfasst eine Erkennungseinheit 266 zur Erkennung der Hardware-Kennung 260 und der Software-Kennung 262 im über die Schnittstelle 256 verbundenen Zustand. Auf Basis der Kennungen 260 und 262 legt die Erkennungseinheit 266 oder eine weitere Einheit die Konfigurationsparameter 268 fest. Wenigstens ein erster Konfigurationsparameter 268 wird dabei auf Basis der erkannten Hardware-Kennung 260 festgelegt und wenigstens ein zweiter Konfigurationsparameter 268 wird auf Basis der erkannten Software-Kennung 262 festgelegt. Beispielsweise können die Konfigurationsparameter 268.1 und 268.2 auf Basis der erkannten Hardware-Kennung 260 festgelegt werden und die Konfigurationsparameter 268.3 bis 268.7 können auf Basis der erkannten Software-Kennung 262 festgelegt werden. Andere Zuordnungen sind natürlich möglich. - Die Konfigurationsparameter 268 werden bevorzugt beim erstmaligen Anschließen der Steuerungsvorrichtung 254 an die Gerätekomponente 252 und/oder nach Einschalten einer Stromversorgung des Vakuumgeräts selbsttätig von der Steuerungsvorrichtung 254 auf Basis der Kennungen 260 und 262 festgelegt.
- Die Steuerungsvorrichtung 254 umfasst außerdem eine Steuereinheit 270, die die Pumpeinheit 258 auf Basis der zuvor festgelegten Konfigurationsparameter 268 steuert.
- Sowohl die Erkennung der Kennungen 260 und 262 als auch die Steuerung der Pumpeinheit 258 erfolgen hier über ein und dieselbe Schnittstelle 256. Grundsätzlich können aber beispielsweise auch separate Schnittstellen vorgesehen sein.
-
- 111
- Turbomolekularpumpe
- 113
- Einlassflansch
- 115
- Pumpeneinlass
- 117
- Pumpenauslass
- 119
- Gehäuse
- 121
- Unterteil
- 123
- Elektronikgehäuse
- 125
- Elektromotor
- 127
- Zubehöranschluss
- 129
- Datenschnittstelle
- 131
- Stromversorgungsanschluss
- 133
- Fluteinlass
- 135
- Sperrgasanschluss
- 137
- Motorraum
- 139
- Kühlmittelanschluss
- 141
- Unterseite
- 143
- Schraube
- 145
- Lagerdeckel
- 147
- Befestigungsbohrung
- 148
- Kühlmittelleitung
- 149
- Rotor
- 151
- Rotationsachse
- 153
- Rotorwelle
- 155
- Rotorscheibe
- 157
- Statorscheibe
- 159
- Abstandsring
- 161
- Rotornabe
- 163
- Holweck-Rotorhülse
- 165
- Holweck-Rotorhülse
- 167
- Holweck-Statorhülse
- 169
- Holweck-Statorhülse
- 171
- Holweck-Spalt
- 173
- Holweck-Spalt
- 175
- Holweck-Spalt
- 179
- Verbindungskanal
- 181
- Wälzlager
- 183
- Permanentmagnetlager
- 185
- Spritzmutter
- 187
- Scheibe
- 189
- Einsatz
- 191
- rotorseitige Lagerhälfte
- 193
- statorseitige Lagerhälfte
- 195
- Ringmagnet
- 197
- Ringmagnet
- 199
- Lagerspalt
- 201
- Trägerabschnitt
- 203
- Trägerabschnitt
- 205
- radiale Strebe
- 207
- Deckelelement
- 209
- Stützring
- 211
- Befestigungsring
- 213
- Tellerfeder
- 215
- Not- bzw. Fanglager
- 217
- Motorstator
- 219
- Zwischenraum
- 221
- Wandung
- 223
- Labyrinthdichtung
- 250
- Vakuumgerät
- 252
- Gerätekomponente
- 254
- Steuerungsvorrichtung
- 256
- Schnittstelle
- 258
- Pumpeinheit
- 260
- Hardware-Kennung
- 262
- Software-Kennung
- 263
- Speicher
- 264
- Kennungsmodul
Claims (15)
- Verfahren zur Herstellung eines Vakuumgeräts (111, 250),
wobei das Vakuumgerät (111, 250) eine Gerätekomponente (252), insbesondere eine Pumpkomponente,
eine Steuerungsvorrichtung (254), insbesondere ein Antriebsgerät, für die Gerätekomponente (252), und
eine Schnittstelle (256) zur Verbindung der Steuerungsvorrichtung (254) mit der Gerätekomponente (252) aufweist,
wobei die Steuerungsvorrichtung (254) dazu eingerichtet ist, die Gerätekomponente (254) auf Basis wenigstens eines ersten Konfigurationsparameters (268) und eines zweiten Konfigurationsparameters (268) zu steuern; wobei das Herstellungsverfahren umfasst,
dass an der Gerätekomponente (252) eine permanente Hardware-Kennung (260) vorgesehen wird und die Steuerungsvorrichtung (254) zur Erkennung der Hardware-Kennung (260) und Festlegung des ersten Konfigurationsparameters (268) auf Basis der Hardware-Kennung (260) eingerichtet wird, und dass an der Gerätekomponente (252) eine Software-Kennung (262) in einem nichtflüchtigen Speicher vorgesehen wird und die Steuerungsvorrichtung (254) zur Erkennung der Software-Kennung (262) und zur Festlegung des zweiten Konfigurationsparameters (268) auf Basis der Software-Kennung (262) eingerichtet wird,
sodass durch die Steuerungseinrichtung (254) im mit der Gerätekomponente (252) verbundenen Zustand sowohl der erste als auch der zweite Konfigurationsparameter (268) selbsttätig festlegbar ist. - Verfahren nach Anspruch 1,
wobei der erste Konfigurationsparameter (268) sicherheitsrelevant, zertifiziert und/oder gerätespezifisch ist und/oder eine absolute Grenze für eine Steuergröße aufweist. - Verfahren nach Anspruch 1 oder 2,
wobei der erste Konfigurationsparameter (268) eine Nenndrehzahl, eine Maximaldrehzahl, eine Motornennspannung, einen maximalen Phasenstrom und/oder eine Maximaltemperatur einer Gerätekomponente betrifft. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei der zweite Konfigurationsparameter (268) applikationsspezifisch, gefahrenunabhängig und/oder zertifizierungsfrei ist. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei die Hardware-Kennung (260) durch wenigstens einen Kennwiderstand und/oder durch wenigstens ein, von der Steuerungsvorrichtung (254) erkennbares, mechanisches Merkmal gebildet ist. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei die Schnittstelle (256) eine Steckverbindung umfasst. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei an der Gerätekomponente (252) ein Kennungsmodul (264) vorgesehen ist, welches die Hardware-Kennung (260) und/oder die Software-Kennung (262) umfasst. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei die Steuerungsvorrichtung (254) für den ersten und/oder zweiten Konfigurationsparameter (268) eine vordefinierte Tabelle umfasst, welche eine Zuordnung von Werten für den Konfigurationsparameter (268) zu unterschiedlichen Kennungen umfasst, und der erste bzw. zweite Konfigurationsparameter (268) durch die Steuerungsvorrichtung (254) auf Basis der Tabelle festlegbar ist. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei wenigstens eine der Kennungen (260, 262), insbesondere die Software-Kennung (262), eine Produktbezeichnung und/oder eine Artikelnummer umfasst; und/oder
wobei wenigstens eine der Kennungen (260, 262), insbesondere die Software-Kennung (262), eine Prüfinformation, insbesondere eine Prüfsumme, umfasst. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei die Hardware-Kennung (260) und die Software-Kennung (262) jeweils so ausgebildet sind, dass sie von einer unberechtigten Person zumindest im Wesentlichen nicht oder nicht in zulässiger Weise veränderbar ist. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei wenigstens eine der Kennungen (260, 262), insbesondere die Software-Kennung (262), verschlüsselt ist, insbesondere zumindest im Wesentlichen pseudozufällig und/oder zufallsresistent ist. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei die Steuerungsvorrichtung (254) dazu eingerichtet ist, den Betrieb der Gerätekomponente (252) zu unterbinden, wenn keine zulässige Hardware-Kennung (260) erkennbar ist. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei die Steuerungsvorrichtung (254) dazu eingerichtet ist, bis zu einer erfolgten Erkennung einer zulässigen Software-Kennung (262) den Betrieb und/oder bestimmte Funktionalitäten der Gerätekomponente (252) teilweise oder vollständig zu unterbinden. - Verfahren nach wenigstens einem der vorstehenden Ansprüche,
wobei die Steuerungsvorrichtung (254) dazu eingerichtet ist, bis zu einer erfolgten Erkennung einer zulässigen Software-Kennung (262) einen Betrieb auf Grundlage zumindest eines voreingestellten Wertes für den zweiten Konfigurationsparameter (268) zu veranlassen. - Vakuumgerät (111, 250), insbesondere Vakuumpumpe, Vakuummessgerät, Lecksuch- und/oder Vakuumkammergerät, mit
einer Gerätekomponente (252), insbesondere einer Pumpkomponente,
einer Steuerungsvorrichtung (254), insbesondere einem Antriebsgerät, für die Gerätekomponente (252) und
einer Schnittstelle (256) zur Verbindung der Steuerungsvorrichtung (254) mit der Gerätekomponente (252),
wobei die Steuerungsvorrichtung (254) dazu eingerichtet ist, die Gerätekomponente (252) auf Basis wenigstens eines ersten Konfigurationsparameters (268) und eines zweiten Konfigurationsparameters (268) zu steuern,
wobei an der Gerätekomponente (252) eine permanente Hardware-Kennung (260) vorgesehen ist und die Steuerungsvorrichtung (254) zur Erkennung der Hardware-Kennung (260) und Festlegung des ersten Konfigurationsparameters (268) auf Basis der Hardware-Kennung (260) eingerichtet ist, und
wobei an der Gerätekomponente (252) eine Software-Kennung (262) in einem nichtflüchtigen Speicher vorgesehen ist und die Steuerungsvorrichtung (254) zur Erkennung der Software-Kennung (262) und zur Festlegung des zweiten Konfigurationsparameters (268) auf Basis der Software-Kennung (262) eingerichtet ist,
sodass durch die Steuerungseinrichtung (254) im mit der Gerätekomponente (252) verbundenen Zustand sowohl der erste als auch der zweite Konfigurationsparameter (268) selbsttätig festlegbar ist.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20214823.5A EP3848588B1 (de) | 2020-12-17 | 2020-12-17 | Vakuumgerät |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20214823.5A EP3848588B1 (de) | 2020-12-17 | 2020-12-17 | Vakuumgerät |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3848588A1 true EP3848588A1 (de) | 2021-07-14 |
| EP3848588B1 EP3848588B1 (de) | 2022-11-30 |
Family
ID=73855230
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20214823.5A Active EP3848588B1 (de) | 2020-12-17 | 2020-12-17 | Vakuumgerät |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP3848588B1 (de) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101761501A (zh) * | 2009-12-25 | 2010-06-30 | 北京中科科仪技术发展有限责任公司 | 一种分子泵型号的识别方法 |
| EP3536966A1 (de) | 2018-03-07 | 2019-09-11 | Pfeiffer Vacuum GmbH | Vakuumgerät |
| EP3620660A1 (de) * | 2019-08-06 | 2020-03-11 | Pfeiffer Vacuum Gmbh | Vakuumgerät |
| EP3660317A1 (de) * | 2018-11-28 | 2020-06-03 | Pfeiffer Vacuum Gmbh | Vakuumgerät |
-
2020
- 2020-12-17 EP EP20214823.5A patent/EP3848588B1/de active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101761501A (zh) * | 2009-12-25 | 2010-06-30 | 北京中科科仪技术发展有限责任公司 | 一种分子泵型号的识别方法 |
| EP3536966A1 (de) | 2018-03-07 | 2019-09-11 | Pfeiffer Vacuum GmbH | Vakuumgerät |
| EP3660317A1 (de) * | 2018-11-28 | 2020-06-03 | Pfeiffer Vacuum Gmbh | Vakuumgerät |
| EP3620660A1 (de) * | 2019-08-06 | 2020-03-11 | Pfeiffer Vacuum Gmbh | Vakuumgerät |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3848588B1 (de) | 2022-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3657021A1 (de) | Vakuumpumpe | |
| EP4108932B1 (de) | Rezipient und system mit rezipient und hochvakuumpumpe | |
| EP3456979B1 (de) | Vakuumgerät und verfahren zur erzeugung einer information betreffend den betrieb eines vakuumgerätes | |
| EP3660317B1 (de) | Vakuumgerät | |
| EP3845764B1 (de) | Vakuumpumpe und vakuumpumpensystem | |
| EP3848588B1 (de) | Vakuumgerät | |
| EP3620660B1 (de) | Vakuumgerät | |
| EP3438460B1 (de) | Vakuumpumpe | |
| EP3683449B1 (de) | Magnetlager und vakuumgerät | |
| EP3135932B1 (de) | Vakuumpumpe und permanentmagnetlager | |
| DE102020116770B4 (de) | Vakuumpumpe mit integriertem miniaturventil | |
| EP3730802B1 (de) | Flanschelement | |
| EP3536965B1 (de) | Vakuumpumpe, wobei der träger eines wälzlagers eine veränderbare steifigkeit und/oder dämpfungswirkung hat | |
| EP3327293B1 (de) | Vakuumpumpe mit mehreren einlässen | |
| EP3196471B1 (de) | Vakuumpumpe | |
| EP4194700A1 (de) | Vakuumpumpe mit einer holweck-pumpstufe mit veränderlicher holweck-geometrie | |
| EP3536966B1 (de) | Vakuumgerät | |
| EP4212730A1 (de) | Vakuumpumpe mit optimierter holweck-pumpstufe zur kompensation temperaturbedingter leistungseinbussen | |
| EP3575610B1 (de) | Vakuumpumpe mit betriebsmittelspeicher | |
| EP4293232B1 (de) | Turbomolekularpumpe | |
| EP3339651B1 (de) | Vakuumpumpe | |
| DE102020124825A1 (de) | Motor-Pumpe-Einheit | |
| EP4174321B1 (de) | Vakuumpumpe | |
| EP3564538B1 (de) | Vakuumsystem und verfahren zur herstellung eines solchen | |
| EP4474654B1 (de) | Turbomolekularvakuumpumpe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| 17P | Request for examination filed |
Effective date: 20210706 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20220801 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1534897 Country of ref document: AT Kind code of ref document: T Effective date: 20221215 Ref country code: DE Ref legal event code: R096 Ref document number: 502020002104 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230331 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230228 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230330 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230301 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221217 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221217 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502020002104 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221217 |
|
| 26N | No opposition filed |
Effective date: 20230831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230130 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221217 |
|
| PGRI | Patent reinstated in contracting state [announced from national office to epo] |
Ref country code: IT Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20201217 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221130 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20251219 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20260113 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20251223 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CZ Payment date: 20251215 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20260224 Year of fee payment: 6 |