EP3856673B1 - Kran sowie verfahren zum überwachen des betriebs eines solchen krans - Google Patents
Kran sowie verfahren zum überwachen des betriebs eines solchen krans Download PDFInfo
- Publication number
- EP3856673B1 EP3856673B1 EP19806147.5A EP19806147A EP3856673B1 EP 3856673 B1 EP3856673 B1 EP 3856673B1 EP 19806147 A EP19806147 A EP 19806147A EP 3856673 B1 EP3856673 B1 EP 3856673B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- crane
- gravity
- determined
- load
- overall centre
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
- B66C23/905—Devices for indicating or limiting lifting moment electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/26—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes for use on building sites; constructed, e.g. with separable parts, to facilitate rapid assembly or dismantling, for operation at successively higher levels, for transport by road or rail
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C2700/00—Cranes
- B66C2700/03—Cranes with arms or jibs; Multiple cranes
- B66C2700/0321—Travelling cranes
- B66C2700/0328—Cranes on rails or on rail vehicles
- B66C2700/0335—Cranes on rails or on rail vehicles with a slewing arm
- B66C2700/0342—Cranes on rails or on rail vehicles with a slewing arm on a turntable
Definitions
- the present invention relates to a method for monitoring the operation of a crane, in which an overall center of gravity of the crane with a load that may be suspended from it is determined and its position relative to a tipping edge of the crane is monitored.
- the invention also relates to a crane, in particular a tower crane, with drive devices for crane and/or load movements, and a crane controller for controlling the drive devices, the crane controller having a monitoring device for monitoring the crane load and limiting crane movements when a critical crane load is reached.
- a crane controller or a monitoring device implemented therein is usually used to monitor whether the stability of the crane is guaranteed or whether the crane load has reached a critical load limit, so that the crane threatens to fall over or otherwise way is endangered, in order to then, if necessary, switch off the corresponding drive devices of the crane in good time or only allow those crane movements which reduce or at least do not further increase the crane load, cf., for example EP 2 578 757 A1 .
- the hoisting load and the radius of the hoisting load can be monitored, for example by determining the tensile force acting on the hoist cable or a torque induced thereby on the hoist cable winch, and - as far as the radius is concerned - via the position of a trolley or an unwound trolley cable length can take place.
- the variables mentioned can also be determined in a different way, for example in the case of cranes with a luffing jib, the radius can be determined via the luffing angle and, if necessary, the length of the jib that has been telescoped out in each case.
- a load moment acting on the crane can be determined as a result, which can be compared with a corresponding load limit in the form of a limit moment in order to ensure the stability of the crane. If the monitoring device detects that a load that is generally too heavy is being lifted or that a certain lifting load is being moved too far outwards so that the radius is too great for this load, the crane controller can, for example, shut down the hoist drive and the trolley drive to ensure the stability of the crane .
- DE 10 2005 035 729 A1 proposes continuously reducing the speed of the crane drives when the crane is approaching its load limit due to a corresponding crane movement.
- DE 10 2008 021 627 A1 for monitoring the crane loads to monitor the overall center of gravity of the crane, including the attached load, for its position relative to a tipping edge of the crane.
- DE 10 2008 021627 A1 discloses all the features of the preamble of claim 1 or claim 12.
- the stability of a crane not only depends to a large extent on the load moment loading the crane, but also on the support base on which the crane rests or stands.
- cranes are supported on the ground by extendable ground supports, so that a support quadrilateral usually results, which is defined by the connecting lines through the contact points.
- a support quadrilateral results in a directional dependency of the stability, because in different rotary positions of the crane about its upright crane axis of rotation, the load moment is counteracted by a counter-torque of different magnitude, which results from the different lever arm of the supporting forces on the supports.
- Said supports define tilting edges, from which the pivot point of the rotatable crane upper part is at different distances, depending on the direction in which said upper part is rotated.
- variably adjustable support bases have recently been used in order to be able to adapt the support system to limited space. If, for example, a crane is standing in very cramped conditions on a roadside or pavement, it is sometimes not possible to fully extend the outriggers in order to set up the largest possible outrigger square. In order to still be able to use the crane in said erection situation, it is possible to operate the crane with one or more guy supports that are only partially extended, which of course then affects the stability and must be taken into account by the monitoring device of the crane.
- the object of the present invention is to provide an improved crane and an improved method for monitoring the operation of a crane, which avoid the disadvantages of the prior art and advantageously develop the latter.
- a timely restriction of critical crane movements should be ensured without unnecessarily restricting efficient operation of the crane with high handling capacities.
- a possible limitation of crane movements is then determined on the basis of the position of this most critical future overall center of gravity in relation to a tipping edge.
- Such a forward-looking determination of future overall center of gravity positions taking into account various operating and/or influencing variables and their changes, necessary countermeasures can be initiated in good time without unnecessarily restricting the crane operation and the performance of the crane.
- a radius reserve can be determined, i.e. the still possible distance that can increase the radius and that can still be traveled without endangering the stability of the crane.
- the mentioned radius reserve can be the way that the trolley on the jib can still be moved outwards.
- a movement reserve for a possible rotary movement of the crane can also be determined based on the said distance of the most critical future overall center of gravity from the tipping edge. For example, turning the crane around its upright crane axis of rotation to the right to one less If the support foot is far extended, the angle of rotation to the right can be limited using the specified distance as a movement reserve.
- Said most critical future total center of gravity can be determined from the several possible future total center of gravity positions, for example based on the distances of the possible future total center of gravity from the tilting edges of the support base of the crane. If all determined possible future overall centers of gravity lie within the support surface spanned by the tipping edges of the support base, the most critical overall center of gravity can be selected which has the smallest distance from a tipping edge. However, if one or more possible future overall centers of gravity lie outside of the support base mentioned, the overall center of gravity lying outside or the overall center of gravity lying outside at the greatest distance from a tipping edge can be selected.
- the remaining load capacity or stability reserve can be determined on the basis of the distance between the selected most critical overall center of gravity and the nearest tipping edge crane stops.
- the device for determining the future overall centers of gravity not only takes into account the various possible crane movements and the inertia forces induced thereby from, for example, a possible rotary movement, a possible lifting and/or a possible cross-travel movement of the crane, but also influencing variables that go beyond this.
- a possible shift in the overall center of gravity that can result from a wind load can be determined.
- a wind force can be used for this, which results from the maximum permissible wind speed at which the crane may be operated, or from the difference between a current wind speed and the stated maximum permissible wind speed.
- different wind directions and the resulting different shifts in the overall center of gravity can be determined and taken into account, with advantageously only one or a few wind directions having an unfavorable influence on the stability of the crane needing to be taken into account.
- wind from behind and/or wind from the side can be taken into account with the respective maximum permissible wind speed.
- a structural deformation of the crane which can result from current operating and/or influencing variables and/or changes in these operating and/or influencing variables, can also be determined for determining the possible shift in the overall center of gravity.
- the crane deformation and the resulting shift in the overall center of gravity can be calculated, which occurs as a result of a specific wind load, for example at a specific wind speed with wind from the front or wind from the side.
- a crane deformation can also be calculated, which can result from inertia forces from lifting the load and/or moving the trolley and/or twisting the crane about its upright crane axis of rotation and/or the boom luffing or luffing.
- the overall center of gravity is not only shifted outwards by the travel of the trolley, but also by the bending deformation of the tower that occurs. In a similar way, the overall center of gravity can shift if, for example, the tower is deformed forwards by a gust of wind from behind.
- centrifugal forces can be determined and taken into account for shifting the overall center of gravity.
- centrifugal forces can, on the one hand, pull the load on the load hook outwards, depending on the lowering depth of the load hook.
- an additional deformation of the tower or the telescoping luffing jib can occur if, in addition to the load, a corresponding centrifugal moment pulls on the crane.
- certain failure states and their effect on a shift in the overall center of gravity can also be taken into account, for example.
- a broken cable can be taken into account and its effect on a shift in the overall center of gravity can be determined.
- Such a consideration of a rope break can consist on the one hand in the fact that the entire system lacks the hook load and its share in the overall center of gravity and on the other hand that a dynamic load acts on the crane due to the sudden tearing off of the hook load, in particular in the form of a load towards the rear of the crane due to the Recovery of previously existing deformations under load.
- the maximum movement speeds and/or accelerations intended by the crane controller can be used as a basis for determining the mass forces resulting from such trolley travel, lifting and lowering of the load hook and twisting of the jib or other crane movements. Is still no limitation on movement speeds have been specified by the monitoring device, so maximum travel speeds and accelerations can be used as a basis. If the travel speeds or an individual travel speed have already been limited, for example because the permissible load limits have already been approached, the mass forces can be determined on the basis of this already limited speed and/or acceleration and a possible shift in the overall center of gravity can be calculated from this.
- the restriction made by the monitoring device based on the position of the most critical possible future overall center of gravity with regard to a tipping edge can fundamentally be of different types.
- all crane drives can be restricted accordingly, for example by prescribing a reduced maximum speed and/or by prescribing individual actuation of the crane drives, in which case only one of the several crane drives can be operated at the same time.
- the monitoring device can also selectively select or implement the restriction to be implemented, specifically based on the crane movement on which the displacement and the resulting overall center of gravity were based, which was then selected as the most critical overall center of gravity. If the most critical overall center of gravity has resulted, for example, from a counter-clockwise rotation of the crane, for example because this would lead to a support that is only partially extended, the monitoring device can, for example, lock the slewing gear in the corresponding direction of rotation, while lifting and lowering movements of the load hook are still possible without restrictions are.
- a further crane movement that increases the tilting moment can also be prevented, restricted or limited, for example moving the trolley of a tower crane further outwards.
- the tipping edges of the crane are determined based on the respective extended state of the supports of the ground support, in order to be able to take different support configurations into account.
- sensors can record the current extension status of the respective support, in order to then use the recorded extension values to determine the support base or the tilting edges, which can be determined using connecting lines through the contact points.
- the position and/or orientation of the tilting edges can also be taken from a data memory in which the tilting edges and their position and orientation for different extension states can be stored.
- the monitoring device of the crane control can calculate the possible shifts and possible future positions of the overall center of gravity and their position relative to the tipping edges currently based on a respective actual state, in particular on the basis of current sensor values of the relevant parameters.
- the monitoring device takes the current overall center of gravity as the starting point and uses the possible operating and influencing variables and their possible changes, such as activation of the crane drives, the wind forces mentioned or possible deformations, to determine the possible shifts in the current overall center of gravity and the future possible ones resulting from this Overall priorities, in order to then limit the crane movements in the manner mentioned.
- the theoretically possible, future center of gravity positions can also be determined outside of the crane control and the monitoring device, in particular in advance using a model that takes into account the possible different setup states of the crane and the relevant operating and/or influencing variables and their possible changes taken into account.
- the parameter sets calculated in advance using the model can be made available to the control device or the monitoring device of the crane be, for example by means of a data memory in which the respective parameter sets are stored.
- the monitoring device then only needs to access the parameter sets mentioned and, based on the current overall center of gravity and/or current positions of the slewing gear, trolley, load hook and/or boom, call up a relevant parameter set that contains the future center of gravity positions and for a respective current crane position and configuration is applicable.
- the crane 1 can be designed as a mobile construction crane or mobile tower crane, which comprises a tower 2, which is supported on a slewing platform 3, which sits on an undercarriage 4 and can be rotated about an upright axis of rotation by means of a slewing gear drive device 9.
- Said undercarriage 4 can be in the form of a truck or can be moved in some other way, but it can also be a firmly anchored or supported support base.
- the tower 2 can carry a boom 5, which can be luffed up and down about a lying, transverse luffing axis, cf. 1 .
- a luffing drive device 12 for the boom 5 can, for example, luff the boom 5 via the guy ropes.
- a trolley 6 can be mounted on said boom 5 so that it can be moved longitudinally and can be moved by a trolley drive device 11, for example via a corresponding trolley cable.
- a hoisting rope 8 can run over said trolley 6, to which a load harness can be connected, for example in the form of a load hook 7, in order to lift a load in a manner known per se.
- a hoist drive device 10 can drive a hoist cable drum accordingly.
- the crane can include further drive devices, for example a telescoping boom with a telescoping drive device 13, a ballast adjustment drive device 15 for adjusting a ballast or a traversing drive device 14 for moving the entire crane could be provided, which is shown in drawn version of the mobile construction crane will not be the case regularly, since this is jacked up for lifting loads.
- a ballast adjustment drive device 15 for adjusting a ballast or a traversing drive device 14 for moving the entire crane could be provided, which is shown in drawn version of the mobile construction crane will not be the case regularly, since this is jacked up for lifting loads.
- the various drives are controlled by a central crane control 16 which, in a manner known per se, can provide appropriate operating levers or other input means for a crane operator so that he can control the various movement axes of the crane.
- the crane controller 16 includes a monitoring device 17 which uses suitable sensors to monitor the crane load acting on the crane, in particular the lifting load picked up on the load hook 7 and the radius that the load hook 7 has with respect to the base of the crane. Said radius can be determined, for example, via the position of the trolley 6 on the jib 5 and possibly the luffing angle of the jib 5 relative to the horizontal.
- the drive devices mentioned and/or the crane elements that can be moved by them can be monitored in their position or in their operating state by corresponding sensors, so that the crane controller 16 or the monitoring device 17 can determine the current crane position, i.e. in particular the angle of rotation about the upright crane axis of rotation 18 and thus the orientation of the boom 5, the position of the trolley 6 in terms of the distance from the tower 2, the lowering depth of the load hook 6 and, if necessary, the luffing angle of the boom 5 and the position of the ballast.
- the load picked up on the load hook 6 can be determined by a lifting load sensor which, for example, measures the load on the lifting mechanism 10 .
- the current overall center of gravity of the overall system consisting of crane 1 and the lifting load attached to load hook 7 can be determined by monitoring device 17, specifically with regard to the position of the current overall center of gravity relative to the contact area defined by ground support 19, which in figure 2 is shown.
- the current position of the overall center of gravity, which the monitoring device 17 knows or can determine from the stated state variables, for example can calculate or can read from a set of parameters determined for the crane configuration, is identified by the letter y.
- the mentioned monitoring device 17 can determine the tilting edges 20 which result as connecting lines through the contact points of the ground support 19.
- the ground support 19 for example comprise four supports, which can be extended in pairs to opposite sides of the undercarriage 4 and can be lowered to the ground in the respective extended position.
- the supports of the ground support 19 can be extended to different extents, so that different geometries of the support surface defined by the tilting edges 20 can result. It is fundamentally possible for the supports mentioned to be able to be extended as desired, for example steplessly or stepwise, so that any number of differently configured contact or support surfaces can result.
- each support has 1/4, 2/4, 3/4 and 4/4 or, for example, 1/3, 2/3 and 3/3 can be extended.
- the resulting tilting edges 20 and their orientation can be calculated by the monitoring device either on the basis of sensor signals or read out for the permitted and/or detected extension states in the form of parameter sets.
- the monitoring device 17 Based on the current overall center of gravity, which is in the figure 2 is denoted by y, the monitoring device 17, the shift of the total focus and accordingly possible future total focus positions in the figure 2 are marked with an x, whereby the possible shifts for different operating and/or influencing variables and/or their changes can be determined.
- the various crane movements can be taken into account for the possible shift of the current overall center of gravity towards a possible future overall center of gravity, for example twisting of the crane about the upright crane axis of rotation 18, lifting or lowering of the load on the load hook 7, movement of the trolley 6, etc luffing up or luffing down of the boom 5, optionally telescoping in and out of the boom 5 and/or moving the ballast.
- Such a wind load can, for example, be taken into account virtually in the form of an additional mass force attached to the load hook when the wind presses against the tower from behind.
- such wind force can also be taken into account in the form of an actual shift in the overall center of gravity, in particular because the wind deflects the lifting load picked up on the load hook, in which case the lowering depth of the load hook 7 can be taken into account here, as the lowered load hook allows the load to be deflected further by the wind than when the load hook is moved close to the trolley.
- a deformation of the crane in particular a bending of the tower 2 due to a wind load, can also be taken into account, as was explained at the outset. If, for example, a wind force presses against the tower 2 from behind, it will deform a bit forward towards the boom 3, which increases the radius of the load hook 7 and accordingly shifts the overall center of gravity of the system.
- a deformation of the crane 1 can also be taken into account, which can occur not only in the manner mentioned by wind loads, but also by other load variables, in particular the hoisting load taken up on the load hook 7 and inertial forces from a twisting of the Crane 1, a method of the trolley 6, a raising or lowering of the load hook 7 or another of the crane movements explained.
- the crane structure and, as a result, its deformation properties under loads are known, its deformation can be calculated or determined from the mass forces, wind forces and other loads pulling on the crane mentioned will.
- Such deformations of the crane structure can be determined, for example, using a model, in which case the deformations occurring for different load variables can be stored as a set of parameters and made available to the crane controller 16 or the monitoring device 17 so that they can be called up.
- the deformations mentioned could also be calculated directly and up-to-date using the influencing variables.
- the monitoring device 17 runs through the possible operating and influencing variables and their possible changes, in particular possible crane movements, possible wind loads and possible crane deformations, and from this determines various possible shifts and the resulting possible future center of gravity positions that figure 2 are marked with the reference variable x.
- the monitoring device 17 analyzes the possible future positions of the center of gravity x for their relative position to the tilting edges 20 and selects that which is closest to one of the tilting edges 20 as the most critical future overall center of gravity. In the figure 2 this critical future overall focus is marked with the parameter x k in addition to the letter x.
- the monitoring device 17 can determine the remaining load capacity or stability reserve, and then determine from the said load capacity or stability reserve how far the radius of the crane can be increased. for example by moving the trolley 6 outwards or by luffing the jib 5 or by telescoping the jib 5.
- the monitoring device 17 can determine the possible new locations of the payload for all boom positions or rotary positions of the crane 1 for a lifting load picked up on the load hook 7 .
- These potential new payload locations for all boom positions are in figure 2 marked with the reference number 21 and result - approximately, roughly speaking - in a quadrilateral, the main axes of which are oriented approximately to the main axes of the contact area of the ground support 19, which are determined by the extended states of the supports.
- this radius limit 21 is direction-dependent for a specific lifting load picked up on the load hook 6 and varies for different boom positions or depending on the angle of rotation of the boom 5 about the upright crane axis of rotation 18.
- radius limits 21 can be determined, based on which the crane 1 or its monitoring device 17 knows how far a load picked up on the load hook 7 by corresponding Crane movements can still be moved. Since the specified radius limits 21 are not circular in shape around the crane axis of rotation 18, but - approximately, roughly speaking - have a rectangular or square contour, the specified radius limits 21 cannot only be moved outwards by moving the trolley 6 or by a luffing of the jib 5 be achieved, but also by rotating the crane 1 about its upright crane axis of rotation 18.
- the monitoring device 17 can selectively switch off and/or slow down and/or limit the crane movement leading to a reaching or a further approach to the specified radius limit 21, i.e. in particular an outward movement of the trolley 6 and a corresponding rotary movement about the crane axis of rotation 18.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Control And Safety Of Cranes (AREA)
- Jib Cranes (AREA)
- Automation & Control Theory (AREA)
Description
- Die vorliegende Erfindung betrifft ein Verfahren zum Überwachen des Betriebs eines Krans, bei dem ein Gesamtschwerpunkt des Krans mit einer daran gegebenenfalls angehängten Last bestimmt und auf seine Lage relativ zu einer Kippkante des Krans hin überwacht wird. Die Erfindung betrifft ferner einen Kran, insbesondere Turmdrehkran, mit Antriebseinrichtungen für Kran- und/oder Lastbewegungen, sowie eine Kransteuerung zum Steuern der Antriebseinrichtungen, wobei die Kransteuerung eine Überwachungseinrichtung zum Überwachen der Kranbelastung und Beschränken von Kranbewegungen bei Erreichen einer kritischen Kranbelastung aufweist.
- Bei Kranen wie Baukranen, beispielsweise Mobil- und/oder Teleskopbaukranen oder Turmdrehkranen wird üblicherweise mittels einer Kransteuerung bzw. einer darin implementierten Überwachungseinrichtung überwacht, ob die Standfestigkeit des Krans gewährleistet ist oder die Kranbelastung eine kritische Lastgrenze erreicht, sodass der Kran umzufallen droht oder in anderer Weise gefährdet ist, um dann gegebenenfalls rechtzeitig die entsprechenden Antriebseinrichtungen des Krans abzuschalten bzw. nur noch solche Kranbewegungen zuzulassen, die die Kranbelastung reduzieren oder zumindest nicht weiter erhöhen, vgl. beispielsweise
EP 2 578 757 A1 . Insbesondere können dabei die Hublast und die Ausladung der Hublast überwacht werden, was beispielsweise über die Bestimmung der am Hubseil wirkenden Zugkraft bzw. ein hierdurch an der Hubseilwinde induziertes Drehmoment, und - was die Ausladung anbelangt - über die Position einer Laufkatze bzw. eine abgespulte Katzfahrseillänge erfolgen kann. Je nach Krantyp können die genannten Größen aber auch in anderer Weise bestimmt werden, wobei beispielsweise bei Kranen mit wippbarem Ausleger die Ausladung über den Wippwinkel und gegebenenfalls die jeweils austeleskopierte Auslegerlänge bestimmt werden kann. - Mit der Bestimmung der Hublast und deren Ausladung kann im Ergebnis ein auf den Kran wirkendes Lastmoment bestimmt werden, das mit einer entsprechenden Lastgrenze in Form eines Grenzmoments verglichen werden kann, um die Standfestigkeit des Krans zu gewährleisten. Erkennt die Überwachungseinrichtung, dass eine generell zu schwere Last gehoben wird oder eine bestimmte Hublast zu weit nach außen verfahren wird, sodass die Ausladung für diese Last zu groß wird, kann die Kransteuerung beispielsweise den Hubwerksantrieb und den Katzfahrantrieb stillsetzen, um die Standfestigkeit des Krans sicherzustellen.
- Die Standfestigkeit des Krans hängt jedoch nicht ausschließlich von den genannten Größen Hublast und Ausladung ab, sondern wird auch von anderen Betriebs- und Einflussgrößen beeinflusst, beispielsweise von Bewegungsgeschwindigkeit und Beschleunigung. Aus diesem Grund schlägt beispielsweise die Schrift
DE 10 2005 035 729 A1 vor, die Geschwindigkeit der Kranantriebe kontinuierlich zu reduzieren, wenn sich der Kran durch eine entsprechende Kranbewegung seiner Traglastgrenze annähert. Ferner schlägt dieDE 10 2008 021 627 A1 für die Überwachung der Kranbelastungen vor, den Gesamtschwerpunkt des Krans inklusive der angehängten Last auf seine Lage relativ zu einer Kippkante des Krans zu überwachen.DE 10 2008 021627 A1 offenbart alle Merkmale des Oberbegriffs des Anspruchs 1, bzw. des Anspruchs 12. - Zudem hängt die Standfestigkeit eines Krans nicht nur maßgeblich von dem den Kran belastenden Lastmoment ab, sondern auch von der Abstützbasis, auf der der Kran ruht bzw. steht. Üblicherweise werden Krane durch ausfahrbare Bodenstützen am Boden abgestützt, sodass sich üblicherweise ein Abstütz-Viereck ergibt, das durch die Verbindungslinien durch die Aufstandspunkte definiert wird. Durch ein solches Abstütz-Viereck ergibt sich eine Richtungsabhängigkeit der Standfestigkeit, da in verschiedenen Drehstellungen des Krans um seine aufrechte Krandrehachse dem Lastmoment ein unterschiedlich großes Gegenmoment entgegenwirkt, welches sich aus dem unterschiedlichen Hebelarm der Abstützkräfte an den Stützen ergibt. Die genannten Stützen definieren Kippkanten, von denen der Anlenkpunkt des drehbaren Kranoberteils unterschiedlich weit entfernt ist, je nachdem in welche Richtung der genannte Oberteil verdreht wird.
- Hinzu kommt, dass in jüngerer Zeit variabel einstellbare Abstützbasen verwendet werden, um das Abstützsystem an beschränkte Platzverhältnisse anpassen zu können. Steht beispielsweise ein Kran in sehr beengten Platzverhältnissen an einem Straßenrand oder Trottoir, ist es manchmal nicht möglich, die Stützen vollständig auszufahren, um ein maximal großes Abstütz-Viereck aufzuspannen. Um dennoch den Kran in besagter Aufstellsituation einsetzen zu können, ist es möglich, den Kran auch mit einer oder mehreren nur teilweise ausgefahrenen Abspannstützen zu betreiben, was natürlich dann Auswirkungen auf die Standfestigkeit hat und von der Überwachungseinrichtung des Krans berücksichtigt werden muss. Durch nicht vollständiges bzw. unterschiedliches Ausfahren der Stützen der Bodenabstützung können sich vom Quadrat bzw. Rechteck abweichende Abstützflächen ergeben, bei denen die von den Aufstandspunkten bzw. von Verbindungsgeraden durch die Aufstandspunkte definierte Kippkanten nicht mehr rechteckig bzw. nicht mehr parallel zueinander verlaufen können. Hierdurch wird die zuvor erläuterte Richtungsabhängigkeit der Standfestigkeit nochmals erhöht, da der Kran ein nur geringeres Lastmoment abfangen kann, wenn die Last bzw. der Ausleger über die nur teilweise ausgefahrenen Stützen gedreht wird, während der Kran ein größeres Lastmoment abtragen kann, wenn der Ausleger mit der Last über die vollständig ausgefahrenen Stützen gedreht wird.
- Um bei solchen variabel konfigurierbaren Bodenabstützungen die Kransicherheit gewährleisten zu können, schlägt die Schrift
DE 10 2008 021 627 A1 vor, die Kippkanten des Krans in Abhängigkeit von einer jeweils erreichten Istposition der Stützen zu ermitteln und den Gesamtschwerpunkt des Kransystems, das heißt des Krans mit der daran jeweils angehängten Last, zu bestimmen. Der jeweils bestimmte Gesamtschwerpunkt wird von der Überwachungseinrichtung sodann daraufhin überprüft, ob er innerhalb der von den Kippkanten aufgespannten Abstützfläche liegt. Auf einem Display im Kranführerhaus wird die aktuelle Lage des Gesamtschwerpunkts in Bezug auf die von den Kippkanten definierte Abstützfläche angezeigt, sodass der Kranführer die Kranbewegung rechtzeitig stoppen kann, wenn sich der Gesamtschwerpunkt bedrohlich einer Kippkante nähert. - Bei einer solchen Überwachung des Gesamtschwerpunkts und dessen Lage bezüglich einer Kippkante ist es jedoch nicht ganz einfach, einerseits eine effiziente Kranbedienung zu ermöglichen, bei der der Kranführer eine Nutzlast möglichst unter Ausnutzung der zur Verfügung stehenden Verfahrgeschwindigkeiten von einem Startpunkt zu einem Zielpunkt fahren kann, und andererseits ein rechtzeitiges Abschalten oder Verlangsamen der Kranbewegungen vorzusehen, um eine kritische Kranbelastung sicher zu vermeiden. Werden beispielsweise große Abstände des jeweils erfassten Gesamtschwerpunkts von einer Kippkante als Sicherheitspuffer gefordert, wird die Verfahrbarkeit bzw. Traglast des Krans recht stark beschränkt. Wird umgekehrt nur ein geringerer Sicherheitsabstand des Gesamtschwerpunkts von einer jeweiligen Kippkante gefordert, kann eine entsprechende Kranbewegung vielleicht nicht rasch genug gestoppt werden.
- Hiervon ausgehend liegt der vorliegenden Erfindung die Aufgabe zugrunde, einen verbesserten Kran sowie ein verbessertes Verfahren zum Überwachen des Betriebs eines Krans zu schaffen, die Nachteile des Standes der Technik vermeiden und letzteren in vorteilhafterweise weiterbilden. Insbesondere soll ein rechtzeitiges Beschränken von kritischen Kranbewegungen sichergestellt werden, ohne einen effizienten Betrieb des Krans mit hohen Umschlagleistungen unnötig zu beschränken.
- Erfindungsgemäß wird die genannte Aufgabe durch ein Verfahren gemäß Anspruch 1 sowie einen Kran gemäß Anspruch 12 gelöst. Bevorzugte Ausgestaltungen der Erfindung sind Gegenstand der abhängigen Ansprüche.
- Es wird also vorgeschlagen, nicht mehr nur den jeweils erfassten Gesamtschwerpunkt und dessen Abstand von einer jeweiligen Kippkante zu überwachen, sondern vorausschauend mögliche Verschiebungen des Gesamtschwerpunkts unter verschiedenen Betriebs- und Einflussgrößen abzuschätzen und anhand der in Betracht kommenden zukünftigen Gesamtschwerpunktslagen relativ zur Kippkante die verbleibende Traglast- bzw. Standfestigkeitsreserve abzuschätzen, um notwendige Beschränkungen der Kranbewegungen bzw. Gegenmaßnahmen einleiten zu können. Erfindungsgemäß werden mögliche Verschiebungen des Gesamtschwerpunkts durch mögliche Änderungen verschiedener Betriebs- und/oder Einflussgrößen, die zumindest verschiedene Kranbewegungen umfassen, und sich hierdurch ergebende, zukünftige Gesamtschwerpunktslagen bestimmt, aus denen dann der bezüglich der Kippkante kritischste zukünftige Gesamtschwerpunkt ausgewählt wird. Anhand der Lage dieses kritischsten zukünftigen Gesamtschwerpunkts bezüglich einer Kippkante wird dann eine mögliche Beschränkung von Kranbewegungen bestimmt. Durch eine solche vorausschauende Bestimmung zukünftiger Gesamtschwerpunktslagen unter Berücksichtigung verschiedener Betriebs- und/oder Einflussgrößen und deren Veränderung können notwendige Gegenmaßnahmen rechtzeitig eingeleitet werden, ohne den Kranbetrieb und die Leistungsfähigkeit des Krans unnötig zu beschränken.
- Insbesondere kann anhand des Abstands des ausgewählten kritischsten zukünftigen Gesamtschwerpunkts von der nächstliegenden Kippkante eine Ausladungsreserve bestimmt werden, das heißt der noch mögliche, die Ausladung vergrößernde Weg, der noch gefahren werden kann, ohne die Standfestigkeit des Krans zu gefährden. Im Falle eines Turmdrehkrans kann die genannte Ausladungsreserve der Weg sein, den die Laufkatze am Ausleger noch nach außen verfahren werden kann. Unter Berücksichtigung der Richtungsabhängigkeit der zulässigen Ausladung aufgrund der typischerweise nicht kreisrunden Abstützfläche der Bodenabstützung des Krans kann anhand des besagten Abstands des kritischsten zukünftigen Gesamtschwerpunkts von der Kippkante aber auch eine Bewegungsreserve für eine mögliche Drehbewegung des Krans bestimmt werden. Für beispielsweise ein Verdrehen des Krans um seine aufrechte Krandrehachse nach rechts auf einen weniger weit ausgefahrenen Stützfuß zu, kann anhand des genannten Abstands als Bewegungsreserve der Drehwinkel nach rechts begrenzt werden.
- Der genannte kritischste zukünftige Gesamtschwerpunkt kann aus den mehreren möglichen zukünftigen Gesamtschwerpunktslagen beispielsweise anhand der Abstände der möglichen zukünftigen Gesamtschwerpunkte von den Kippkanten der Abstützbasis des Krans bestimmt werden. Liegen alle ermittelten möglichen zukünftigen Gesamtschwerpunkte innerhalb der von den Kippkanten der Abstützbasis aufgespannten Abstützfläche, kann als kritischster Gesamtschwerpunkt derjenige ausgewählt werden, der den geringsten Abstand von einer Kippkante hat. Liegt indes einer oder mehrere mögliche zukünftige Gesamtschwerpunkte außerhalb der genannten Abstützbasis, kann der außerhalb liegende Gesamtschwerpunkt bzw. der mit größtem Abstand von einer Kippkante außerhalb liegende Gesamtschwerpunkt ausgewählt werden.
- Anhand des Abstands des ausgewählten kritischsten Gesamtschwerpunkts von der nächstliegenden Kippkante kann die verbleibende Traglast- bzw. Standfestigkeitsreserve bestimmt werden, wobei für den geschilderten Fall eines außerhalb der Abstützbasis liegenden zukünftigen Gesamtschwerpunkts eine negative Traglastreserve erhalten wird, was beispielsweise dazu führen kann, dass die Überwachungseinrichtung den Kran stillsetzt.
- Vorteilhafterweise berücksichtigt die Einrichtung zum Bestimmen der zukünftigen Gesamtschwerpunkte nicht nur die verschiedenen möglichen Kranbewegungen und die hierdurch induzierten Massenkräfte aus beispielsweise einer möglichen Drehbewegung, einem möglichen Heben und/oder einer möglichen Katzfahrbewegung des Krans, sondern auch darüber hinausgehende Einflussgrößen.
- Insbesondere kann eine mögliche Verschiebung des Gesamtschwerpunkts bestimmt werden, die sich durch eine Windlast ergeben kann. Beispielsweise kann hierfür eine Windkraft angesetzt werden, die sich aus der maximal zulässigen Windgeschwindigkeit ergibt, bei der der Kran betrieben werden darf, oder sich aus der Differenz einer aktuellen Windgeschwindigkeit und der genannten maximal zulässigen Windgeschwindigkeit ergibt.
- Vorteilhafterweise können dabei verschiedene Windrichtungen und sich hierdurch ergebende, unterschiedliche Verschiebungen des Gesamtschwerpunkts bestimmt und berücksichtigt werden, wobei vorteilhafterweise nur eine oder einige Windrichtungen berücksichtigt werden brauchen, die auf die Standfestigkeit des Krans einen ungünstigen Einfluss haben. Beispielsweise kann für die Bestimmung einer möglichen Verschiebung des Gesamtschwerpunkts Wind von hinten und/oder Wind von der Seite mit der jeweils maximal zulässigen Windgeschwindigkeit berücksichtigt werden.
- In Weiterbildung der Erfindung kann für die Bestimmung der möglichen Verschiebung des Gesamtschwerpunkts auch eine strukturelle Verformung des Krans bestimmt werden, die sich anhand von aktuellen Betriebs- und/oder Einflussgrößen und/oder von Änderungen dieser Betriebs- und/oder Einflussgrößen ergeben können. Insbesondere kann beispielsweise die Kranverformung und die sich hieraus ergebende Verschiebung des Gesamtschwerpunkts berechnet werden, die durch eine bestimmte Windlast, beispielsweise bei einer bestimmten Windgeschwindigkeit bei Wind von vorne oder Wind von der Seite eintritt. Alternativ oder zusätzlich kann auch eine Kranverformung berechnet werden, die sich durch Massenkräfte aus einem Anheben der Last und/oder einem Verfahren der Laufkatze und/oder einem Verdrehen des Krans um seine aufrechte Krandrehachse und/oder einem Abwippen oder Aufwippen des Auslegers ergeben können.
- Wird beispielsweise an einem Turmdrehkran die Ausladung einer am Haken hängenden Last durch Verfahren der Laufkatze erhöht, verschiebt sich der Gesamtschwerpunkt nicht nur durch den Verfahrweg der Laufkatze nach außen, sondern auch durch die sich einstellende Biegeverformung des Turms. In ähnlicher Weise kann sich der Gesamtschwerpunkt verschieben, wenn beispielsweise durch eine Windböe von hinten der Turm nach vorne verformt wird.
- Ferner können Zentrifugalkräfte bestimmt und für die Verschiebung des Gesamtschwerpunkts berücksichtigt werden. Solche Zentrifugalkräfte können beim Verdrehen des Krans um seine aufrechte Krandrehachse einerseits die Last am Lasthaken abhängig von der Senktiefe des Lasthakens nach außen ziehen. Andererseits kann sich auch eine zusätzliche Verformung des Turms oder auch des teleskopierbaren Wippauslegers einstellen, wenn zusätzlich zur Last auch noch ein entsprechendes Zentrifugalmoment am Kran zieht.
- Alternativ oder zusätzlich zu den vorgenannten Einflussgrößen können beispielsweise auch bestimmte Versagenszustände und deren Auswirkung auf eine Verschiebung des Gesamtschwerpunkts berücksichtigt werden. Insbesondere kann ein Seilbruch berücksichtigt und dessen Auswirkung auf eine Verschiebung des Gesamtschwerpunkts bestimmt werden. Eine solche Berücksichtigung eines Seilbruchs kann einerseits darin bestehen, dass dem Gesamtsystem einerseits die Hakenlast und deren Anteil am Gesamtschwerpunkt fehlt und andererseits durch das plötzliche Abreißen der Hakenlast eine dynamische Belastung auf den Kran wirkt, insbesondere in Form einer Belastung zur Rückseite des Krans hin aufgrund der Rückstellung der vormals bestehenden Verformungen unter Last.
- Bezüglich der zu bestimmenden möglichen Verschiebungen und sich hieraus ergebenden zukünftigen Gesamtschwerpunkte werden vorteilhafterweise sämtliche möglichen Kranbewegungen berücksichtigt, wobei alle Bewegungsachsen in jeder ihrer beiden Richtungen berücksichtigt werden können. Bei einem Turmdrehkran kann insbesondere ein Verfahren der Laufkatze nach außen und nach innen, ein Anheben und Absenken des Lasthakens und ein Verdrehen des Auslegers um die aufrechte Krandrehachse nach rechts und nach links berücksichtigt werden.
- Für die Bestimmung der Massenkräfte, die sich aus einem solchen Katzfahren, Heben und Senken des Lasthakens und Verdrehen des Auslegers oder anderer Kranbewegungen ergeben, können die von der Kransteuerung bestimmungsgemäß vorgesehenen, maximalen Bewegungsgeschwindigkeiten und/oder Beschleunigungen zugrunde gelegt werden. Ist noch keinerlei Beschränkung der Bewegungsgeschwindigkeiten von der Überwachungseinrichtung vorgegeben worden, können also maximale Verfahrgeschwindigkeiten und -beschleunigungen zugrunde gelegt werden. Hat es bereits eine Beschränkung der Verfahrgeschwindigkeiten oder auch einer einzelnen Verfahrgeschwindigkeit gegeben, weil beispielsweise schon eine Annäherung an die zulässigen Lastgrenzen erfolgt ist, können die Massenkräfte unter Zugrundelegung dieser bereits beschränkten Geschwindigkeit und/oder Beschleunigung bestimmt und daraus eine mögliche Verschiebung des Gesamtschwerpunkts berechnet werden.
- Die von der Überwachungseinrichtung anhand der Lage des kritischsten möglichen zukünftigen Gesamtschwerpunkts bezüglich einer Kippkante vorgenommene Beschränkung kann grundsätzlich unterschiedlich beschaffen sein. Beispielsweise können sämtliche Kranantriebe entsprechend beschränkt werden, beispielsweise durch Vorschreiben einer reduzierten Maximalgeschwindigkeit und/oder durch Vorschreiben einer Einzelbetätigung der Kranantriebe, bei der nur noch einer der mehreren Kranantriebe gleichzeitig betrieben werden kann.
- Insbesondere kann die Überwachungseinrichtung die vorzunehmende Beschränkung auch selektiv auswählen bzw. vornehmen, und zwar insbesondere anhand der Kranbewegung, die der Verschiebung und dem daraus resultierenden Gesamtschwerpunkt zugrunde lag, welcher dann als kritischster Gesamtschwerpunkt ausgewählt wurde. Hat sich der kritischste Gesamtschwerpunkt beispielsweise aus einer Drehbewegung des Krans entgegen dem Uhrzeigersinn ergeben, beispielsweise weil dies auf eine nur teilweise ausgefahrene Stütze zuführen würde, kann die Überwachungseinrichtung beispielsweise das Drehwerk in die entsprechende Drehrichtung sperren, während Hebe- und Senkbewegungen des Lasthakens noch unbeschränkt möglich sind. Zusätzlich zu der genannten selektiven Beschränkung kann auch eine weitere das Kippmoment erhöhende Kranbewegung unterbunden, beschränkt oder begrenzt werden, beispielsweise ein weiter nach außen Verfahren der Laufkatze eines Turmdrehkrans.
- In vorteilhafter Weiterbildung der Erfindung werden die Kippkanten des Krans anhand des jeweiligen Ausfahrzustands der Stützen der Bodenabstützung bestimmt, um verschiedene Stützkonfigurationen berücksichtigen zu können. Beispielsweise können Sensoren den aktuellen Ausfahrzustand der jeweiligen Stütze erfassen, um dann anhand der erfassten Ausfahrwerte die Abstützbasis bzw. die Kippkanten zu bestimmen, die anhand von Verbindungslinien durch die Aufstandspunkte ermittelt werden können.
- Vorteilhafterweise kann die Lage und/oder Ausrichtung der Kippkanten auch aus einem Datenspeicher entnommen werden, in dem die Kippkanten und deren Lage und Ausrichtung für verschiedene Ausfahrzustände abgelegt sein kann.
- Die Überwachungseinrichtung der Kransteuerung kann die möglichen Verschiebungen und möglichen zukünftigen Lagen des Gesamtschwerpunkts und deren Position relativ zu den Kippkanten jeweils aktuell unter Zugrundelegung eines jeweiligen Istzustands, insbesondere auf Basis jeweils aktueller Sensorwerte der relevanten Parameter, berechnen. Die Überwachungseinrichtung legt dabei den aktuellen Gesamtschwerpunkt als Ausgangslage zugrunde und bestimmt anhand der möglichen Betriebs- und Einflussgrößen und deren möglichen Änderungen wie beispielsweise einer Betätigung der Kranantriebe, der genannten Windkräfte oder möglicher Verformungen die möglichen Verschiebungen des aktuellen Gesamtschwerpunkts und die sich hieraus ergebenden zukünftigen, möglichen Gesamtschwerpunkte, um dann in der genannten Weise Beschränkungen der Kranbewegungen vorzunehmen.
- Alternativ oder zusätzlich kann die Bestimmung der theoretisch möglichen, zukünftigen Schwerpunktslagen aber auch außerhalb der Kransteuerung und der Überwachungseinrichtung erfolgen, insbesondere bereits im Voraus anhand eines Modells, das die möglichen verschiedenen Rüstzustände des Krans berücksichtigt und die relevanten Betriebs- und/oder Einflussgrößen und deren mögliche Änderungen berücksichtigt. Die anhand des Modells im Voraus berechneten Parametersätze können der Steuervorrichtung bzw. der Überwachungseinrichtung des Krans bereitgestellt werden, beispielsweise mittels eines Datenspeichers, in dem die jeweiligen Parametersätze abgelegt sind. Die Überwachungseinrichtung braucht dann lediglich auf die genannten Parametersätze zugreifen und anhand des aktuellen Gesamtschwerpunkts und/oder aktueller Stellungen von Drehwerk, Laufkatze, Lasthaken und/oder Ausleger einen jeweils einschlägigen Parametersatz aufrufen, der die zukünftigen Schwerpunktslagen beinhaltet und für eine jeweilige aktuelle Kranposition und -konfiguration gilt.
- Die Erfindung wird nachfolgend anhand eines bevorzugten Ausführungsbeispiels und zugehöriger Zeichnungen näher erläutert. In den Zeichnungen zeigen:
- Fig. 1:
- eine schematische Seitenansicht eines mobilen Turmdrehkrans, dessen auf einen drehbaren Oberwagen abgestützter Turm einen Ausleger mit Laufkatze trägt und dessen Unterwagen durch ausfahrbare Stützen am Boden abgestützt wird,
- Fig. 2:
- eine Draufsicht auf den Kran aus
Figur 1 , die die Kippkanten, die durch die ausgefahrenen Stützen der Bodenabstützung definiert werden, sowie die aktuelle Schwerpunktlage und mögliche zukünftige Schwerpunktlagen und die mögliche Verfahrbarkeit der Nutzlast zeigt, die aus den möglichen zukünftigen Schwerpunktlagen und der sich hieraus ergebenden Standfestigkeitsreserve ergibt, - Fig. 3:
- eine Darstellung der sich für verschiedene Hublasten und für verschiedene Auslegerstellungen ergebenden zulässigen Ausladungen bzw. Ausladungsgrenzen bei vollständig ausgefahrenen Stützen der Bodenabstützung,
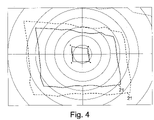
- Fig. 4:
- eine Darstellung der Ausladungsgrenzen für verschiedene Hublasten ähnlich
Figur 3 , jedoch für nicht vollständig ausgefahrene Stützen der Bodenabstützung. - Wie
Fig. 1 zeigt, kann der Kran 1 als Mobilbaukran bzw. mobiler Turmdrehkran ausgebildet sein, der einen Turm 2 umfasst, der auf einer Drehbühne 3 abgestützt ist, die auf einem Unterwagen 4 sitzt und um eine aufrechte Drehachse mittels einer Drehwerks-Antriebseinrichtung 9 gedreht werden kann. Der genannte Unterwagen 4 kann als Lastkraftwagen oder in anderer Weise verfahrbar ausgebildet sein, ggf. aber auch eine fest verankerte bzw. abgestützte Abstützbasis sein. - Der Turm 2 kann einen Ausleger 5 tragen, der um eine liegende, quer verlaufende Wippachse auf und nieder wippbar sein kann, vgl.
Fig. 1 . Eine Wipp-Antriebseinrichtung 12 für den Ausleger 5 kann beispielsweise über die Abspannverseilung den Ausleger 5 wippen. - An dem genannten Ausleger 5 kann eine Laufkatze 6 längsverfahrbar gelagert sein, die durch einen Laufkatzen-Antriebseinrichtung 11 beispielsweise über ein entsprechendes Katzfahrseil verfahren werden kann. Über die genannte Laufkatze 6 kann ein Hubseil 8 ablaufen, an dem ein Lastgeschirr beispielsweise in Form eines Lasthakens 7 angebunden sein kann, um eine Last in an sich bekannter Weise zu heben. Eine Hubwerks-Antriebseinrichtung 10 kann eine Hubseiltrommel hierfür entsprechend antreiben.
- Optional und deshalb nur angedeutet kann der Kran weitere Antriebseinrichtungen umfassen, beispielsweise könnte ein teleskopierbarer Ausleger mit einer Teleskopierantriebseinrichtung 13, eine Ballast-Verstell-Antriebseinrichtung 15 zum Verstellen eines Ballasts oder eine Verfahr-Antriebseinrichtung 14 zum Verfahren des ganzen Krans vorgesehen sein, was in der gezeichneten Ausführung des Mobilbaukrans regelmäßig nicht der Fall sein wird, da dieser zum Heben von Lasten aufgebockt ist.
- Die verschiedenen Antriebe werden von einer zentralen Kransteuerung 16 gesteuert, die in an sich bekannter Weise für einen Kranführer entsprechende Betätigungshebel oder andere Eingabemittel vorsehen kann, damit dieser die verschiedenen Bewegungsachsen des Krans steuern kann. Die Kransteuerung 16 umfasst eine Überwachungseinrichtung 17, die durch geeignete Sensoren die auf den Kran einwirkende Kranbelastung überwacht, insbesondere die am Lasthaken 7 aufgenommene Hublast sowie die Ausladung, die der Lasthaken 7 bezüglich der Standbasis des Krans hat. Die genannte Ausladung kann beispielsweise über die Position der Laufkatze 6 am Ausleger 5 und ggf. den Wippwinkel des Auslegers 5 gegenüber der Horizontalen bestimmt werden.
- Die genannten Antriebseinrichtungen und/oder die hiervon bewegbaren Kranelemente können durch entsprechende Sensoren in ihrer Stellung bzw. in ihrem Betriebszustand überwacht werden, sodass die Kransteuerung 16 bzw. die Überwachungseinrichtung 17 die jeweils aktuelle Kranstellung, also insbesondere den Drehwinkel um die aufrechte Krandrehachse 18 und damit die Ausrichtung des Auslegers 5, die Stellung der Laufkatze 6 im Sinne des Abstands vom Turm 2, die Senktiefe des Lasthakens 6 und gegebenenfalls den Wippwinkel des Auslegers 5 und die Stellung des Ballasts kennt. Zudem kann durch einen Hublastsensor, der beispielsweise die Belastung des Hubwerks 10 misst, die am Lasthaken 6 aufgenommene Last bestimmt werden.
- Aus diesen aktuellen Zustandsgrößen des Krans 1 kann der aktuelle Gesamtschwerpunkt des Gesamtsystems aus Kran 1 und am Lasthaken 7 angeschlagener Hublast von der Überwachungseinrichtung 17 bestimmt werden, und zwar insbesondere hinsichtlich der Lage des aktuellen Gesamtschwerpunkts relativ zu der von der Bodenabstützung 19 definierten Aufstandsfläche, was in
Figur 2 gezeigt ist. - In
Figur 2 ist die aktuelle Lage des Gesamtschwerpunkts, die die Überwachungseinrichtung 17 aus den genannten Zustandsgrößen kennt bzw. bestimmen kann, beispielsweise berechnen kann oder aus einem für die Krankonfiguration bestimmten Parametersatz auslesen kann, mit dem Buchstaben y gekennzeichnet. - Zum anderen kann die genannte Überwachungseinrichtung 17 die Kippkanten 20 bestimmen, die sich als Verbindungslinien durch die Aufstandspunkte der Bodenabstützung 19 ergeben. Wie
Figur 2 zeigt, kann die Bodenabstützung 19 beispielsweise vier Stützen umfassen, die paarweise zu gegenüberliegenden Seiten des Unterwagens 4 hin ausfahrbar sind und in der jeweils ausgefahrenen Stellung auf den Boden absenkbar sind. WieFigur 2 zeigt, können die Stützen der Bodenabstützung 19 unterschiedlich weit ausgefahren werden, sodass sich verschiedene Geometrien der von den Kippkanten 20 definierten Abstützfläche ergeben können. Dabei ist es grundsätzlich möglich, dass die genannten Stützen beliebig, beispielsweise stufenlos oder stufenweise ausgefahren werden können, sodass sich eine beliebige Vielzahl an unterschiedlich konfigurierten Aufstands- bzw. Abstützflächen ergeben können. In der Praxis kann es jedoch sinnvoll sein, nur einige, wenige Ausfahrzustände für die Stützen zuzulassen, beispielsweise dergestalt, dass jede Stütze 1/4, 2/4, 3/4 und 4/4 oder beispielsweise 1/3, 2/3 und 3/3 weit ausfahrbar ist. Die sich ergebenden Kippkanten 20 und deren Ausrichtung können von der Überwachungseinrichtung entweder anhand von Sensorsignalen aktuell berechnet oder auch für die zugelassenen und/oder erfassten Ausfahrzustände in Form von Parametersätzen abgespeicherten Werten ausgelesen werden. - Ausgehend von der aktuellen Gesamtschwerpunktslage, die in der
Figur 2 mit y bezeichnet ist, kann die Überwachungseinrichtung 17 die Verschiebung des Gesamtschwerpunkts und dementsprechend mögliche zukünftige Gesamtschwerpunktslagen, die in derFigur 2 mit einem x gekennzeichnet sind, bestimmen, wobei die möglichen Verschiebungen für verschiedene Betriebs- und/oder Einflussgrößen und/oder deren Änderungen bestimmt werden können. - Insbesondere können für die mögliche Verschiebung des aktuellen Gesamtschwerpunkts hin zu einem möglichen zukünftigen Gesamtschwerpunkt die verschiedenen Kranbewegungen berücksichtigt werden, also beispielsweise ein Verdrehen des Krans um die aufrechte Krandrehachse 18, ein Heben oder Senken der Last am Lasthaken 7, ein Verfahren der Laufkatze 6, ein Aufwippen oder Niederwippen des Auslegers 5, gegebenenfalls ein Einteleskopieren und Austeleskopieren des Auslegers 5 und/oder ein Verfahren des Ballasts.
- Zusätzlich zu den möglichen Kranbewegungen und den sich hieraus ergebenden Massenkräften können für die Bestimmung der möglichen Verschiebungen der Schwerpunktslage auch externe Einflussgrößen auf den Kran berücksichtigt werden. Insbesondere können Windkräfte bzw. eine Windlast auf den Kran 1 berücksichtigt werden.
- Dabei kann eine solche Windlast beispielsweise virtuell in Form einer zusätzlich am Lasthaken angeschlagenen Massenkraft berücksichtigt werden, wenn der Wind von hinten gegen den Turm drückt. Alternativ oder zusätzlich kann eine solche Windkraft aber auch in Form einer tatsächlichen Verschiebung des Gesamtschwerpunkts berücksichtigt werden, insbesondere dadurch, dass der Wind die am Lasthaken aufgenommene Hublast auslenkt, wobei hier gegebenenfalls die Senktiefe des Lasthakens 7 berücksichtigt werden kann, da sich bei tiefer abgesenktem Lasthaken die Last vom Wind weiter auslenken lässt als bei nahe an der Laufkatze gefahrenem Lasthaken. Alternativ oder zusätzlich kann aber auch eine Verformung des Krans, insbesondere eine Biegung des Turms 2 durch eine Windlast berücksichtigt werden, wie dies eingangs erläutert wurde. Drückt beispielsweise eine Windkraft von hinten gegen den Turm 2, wird sich dieser ein Stück weit nach vorne zum Ausleger 3 hin verformen, wodurch sich die Ausladung des Lasthakens 7 vergrößert und dementsprechend der Gesamtschwerpunkt des Systems verschiebt.
- Für die Bestimmung der möglichen zukünftigen Gesamtschwerpunkte x kann insbesondere auch eine Verformung des Krans 1 Berücksichtigung finden, die nicht nur in der genannten Weise durch Windlasten auftreten kann, sondern auch durch andere Belastungsgrößen, insbesondere die am Lasthaken 7 aufgenommene Hublast und Massenkräfte aus einem Verdrehen des Krans 1, einem Verfahren der Laufkatze 6, einem Heben oder Senken des Lasthakens 7 oder einer anderen der erläuterten Kranbewegungen.
- Da die Kranstruktur und damit einhergehend deren Verformungseigenschaften unter Lasten bekannt sind, kann aus den genannten Massenkräften, Windkräften und sonstigen am Kran zerrenden Lasten dessen Verformung berechnet bzw. bestimmt werden. Solche Verformungen der Kranstruktur können beispielsweise anhand eines Modells bestimmt werden, wobei die sich für verschiedene Belastungsgrößen einstellenden Verformungen als Parametersatz abgespeichert und der Kransteuerung 16 bzw. der Überwachungseinrichtung 17 abrufbar bereitgestellt werden können. Alternativ könnten die genannten Verformungen aber auch direkt aktuell anhand der Einflussgrößen berechnet werden.
- Ausgehend vom aktuellen Gesamtschwerpunkt und dessen Lage spielt die Überwachungseinrichtung 17 sozusagen die möglichen Betriebs- und Einflussgrößen und deren möglichen Änderungen, insbesondere mögliche Kranbewegungen, mögliche Windlasten und mögliche Kranverformungen durch und bestimmt hieraus verschiedene mögliche Verschiebungen und die sich ergebenden möglichen zukünftigen Schwerpunktslagen, die in
Figur 2 mit der Bezugsgröße x gekennzeichnet sind. - Die Überwachungseinrichtung 17 analysiert die möglichen zukünftigen Schwerpunktslagen x auf ihre Relativposition zu den Kippkanten 20 hin und wählt als kritischsten zukünftigen Gesamtschwerpunkt denjenigen aus, der sich am nächsten an einer der Kippkanten 20 befindet. In der
Figur 2 ist dieser kritische zukünftige Gesamtschwerpunkt zusätzlich zum Buchstaben x auch noch mit der Kenngröße xk gekennzeichnet. - Anhand des Abstands des kritischen zukünftigen Gesamtschwerpunkts xk von der nächstliegenden Kippkante 20 kann die Überwachungseinrichtung 17 die verbleibende Traglast- bzw. Standfestigkeitsreserve bestimmen, und sodann aus der besagten Traglast- bzw. Standfestigkeitsreserve ermitteln, wie weit die Ausladung des Krans noch erhöht werden kann, beispielsweise durch Verfahren der Laufkatze 6 nach außen oder Abwippen des Auslegers 5 oder Austeleskopieren des Auslegers 5.
- Die bei noch sichergestellter Standsicherheit gegebene Verfahrbarkeit bzw. Vergrößerung der Ausladung, die in der genannten Weise aus dem kritischen zukünftigen Gesamtschwerpunkt bestimmt wurde, ist in der
Figur 2 durch den Pfeil symbolisiert, der die beiden Laufkatzpositionen A und B verbindet. - Unter Berücksichtigung der Kippkanten 20 und der jeweiligen Ausladung und Position, die sich durch das Ausfahren der Stützen ändern kann, kann die Überwachungseinrichtung 17 für eine jeweils am Lasthaken 7 aufgenommene Hublast die möglichen neuen Orte der Nutzlast für alle Auslegerpositionen bzw. Drehstellungen des Krans 1 bestimmen. Diese möglichen neuen Orte der Nutzlast für alle Auslegerpositionen sind in
Figur 2 mit der Bezugsziffer 21 gekennzeichnet und ergeben - näherungsweise, grob gesprochen - ein Viereck, dessen Hauptachsen sich näherungsweise an den Hauptachsen der Aufstandsfläche der Bodenabstützung 19 orientieren, die durch die Ausfahrzustände der Stützen bestimmt werden. - Wie
Figur 2 verdeutlicht, ist diese Ausladungsgrenze 21 für eine bestimmte am Lasthaken 6 aufgenommene Hublast richtungsabhängig und variiert für verschiedene Auslegerstellungen bzw. in Abhängigkeit des Drehwinkels des Auslegers 5 um die aufrechte Krandrehachse 18. - Wie
Figur 3 zeigt, können für verschiedene Nutzlasten bzw. verschiedene am Lasthaken 7 angeschlagene Hublasten jeweils entsprechende, immer größer oder jeweils kleiner werdende Ausladungsgrenzen 21 bestimmt werden, anhand derer der Kran 1 bzw. seine Überwachungseinrichtung 17 weiß, wie weit eine am Lasthaken 7 aufgenommene Last durch entsprechende Kranbewegungen noch bewegt werden kann. Da die genannten Ausladungsgrenzen 21 nicht kreisförmig um die Krandrehachse 18 geformt sind, sondern - näherungsweise, grob gesprochen - rechteckig bzw. viereckig konturiert sind, können die genannten Ausladungsgrenzen 21 nicht nur durch ein Verfahren der Laufkatze 6 nach außen bzw. ein Abwippen des Auslegers 5 erreicht werden, sondern auch durch ein Verdrehen des Krans 1 um seine aufrechte Krandrehachse 18. - Dementsprechend kann die Überwachungseinrichtung 17 selektiv die Kranbewegung abschalten und/oder verlangsamen und/oder begrenzen, die zu einem Erreichen bzw. einem weiteren Annähern an die genannte Ausladungsgrenze 21 führen würde, also insbesondere ein nach außen Verfahren der Laufkatze 6 und eine entsprechende Drehbewegung um die Krandrehachse 18.
- Wie ein Vergleich der
Figuren 3 und4 zeigt, ergeben sich für unterschiedliche Ausfahrzustände der Stützen der Bodenabstützung 19 verschieden geformte Ausladungsgrenzen 21. - Damit zeichnet sich das beschriebene Verfahren zum Überwachen des Betriebs eines Krans sowie damit einhergehend der entsprechende Kran mit der dazu passend ausgebildeten Überwachungseinrichtung unter anderem durch die folgenden vorteilhaften Aspekte aus:
- Das Berechnungsverfahren liefert dabei Kenntnisse aller möglichen Schwerpunktlagen des Gesamtsystems, die sich aufgrund äußerer Einflüsse (z.B. Wind), Massenkräften, bestimmten Versagenszuständen (z.B. Seilbruch) oder anderer Einflüsse ergeben können.
- Ausgehend von der jeweils vorliegenden Krankonfiguration und Lastposition werden alle Systemzustände mit den zugehörigen Schwerpunktlagen, die sich während des Betriebs ergeben könnten, berücksichtigt.
- Bei dem vorliegenden Verfahren werden die Verformungen des Kransystems bei der Bestimmung der Schwerpunktlagen mitberücksichtigt.
- Dabei werden aus allen untersuchten Zuständen diejenigen verwendet, die zur kleinsten Sicherheit gegen Kippen des Systems oder zur Überschreitung von einzelnen Bauteilbelastungen führen würden.
- Das zugrundeliegende Rechenverfahren ist so gestaltet, dass die für die jeweils vorhandene Krankonfiguration und den aktuell vorliegenden Kraneinsatz vorgegebenen Berechnungsvorschriften und Berechnungsnormen erfüllt werden.
- Das Verfahren liefert vorausschauend für alle möglichen Systemzustände die möglichen Schwerpunktlagen des Systems. Daraus können die erlaubten Lastorte und die zugehörigen Gradienten für alle möglichen Bewegungsrichtungen des Kranoberteils und der Last zu jeder Zeit bestimmt, und zur Steuerung der Kranbewegungen herangezogen werden.
- Bei der Ermittlung der zulässigen Lastgröße und Lastposition werden zusätzliche, in der Steuerung hinterlegte Grenzen mit herangezogen. Damit können andere begrenzende Systemzustände der beteiligten Baugruppen berücksichtigt werden.
- Stützendrücke könnten mit in der Steuerung abgelegt und zur zusätzlichen Überwachung/Redundanz herangezogen werden.
Claims (12)
- Verfahren zum Überwachen des Betriebs eines Krans (1), bei dem ein Gesamtschwerpunkt (y) des Krans (1) mit einer daran gegebenenfalls angebrachten Last bestimmt und auf seine Lage relativ zu einer Kippkante (20) des Krans (1) hin überwacht wird, dadurch gekennzeichnet, dass mögliche Verschiebungen des Gesamtschwerpunkts durch mögliche Änderungen verschiedener Betriebs- und/oder Einflussgrößen, die zumindest verschiedene Kranbewegungen umfassen, und sich hierdurch ergebende zukünftige Gesamtschwerpunktslagen (x) bestimmt werden, wobei aus den bestimmten mehreren zukünftigen Gesamtschwerpunktslagen (x) der bezüglich der Kippkante (20) kritischste Gesamtschwerpunkt (xk) bestimmt und anhand der Lage dieses zukünftigen kritischsten Gesamtschwerpunkts (xk) relativ zur Kippkante (20) eine mögliche Beschränkung von Kranbewegungen bestimmt wird.
- Verfahren nach dem vorhergehenden Anspruch, wobei der kritischste zukünftige Gesamtschwerpunkt (xk) anhand dessen Abstand von der Kippkante (20) ausgewählt wird, wobei aus dem Abstand des ausgewählten kritischsten Gesamtschwerpunkts von der Kippkante (20) eine Traglast- und/oder Standfestigkeitsreserve bestimmt wird, anhand derer das Kippmoment erhöhende und/oder die Standfestigkeit verringernde Kranbewegungen wahlweise beschränkt oder freigegeben werden.
- Verfahren nach einem der vorhergehenden Ansprüche, wobei die genannte mögliche Beschränkung von Kranbewegungen ein Abschalten und/oder Begrenzen einer Kranbewegung, eine Verringerung der maximalen Geschwindigkeit oder maximalen Beschleunigung einer Kranbewegung und/oder eine Beschränkung auf eine Einzelbetätigung eines Kranantriebs bei gleichzeitig stillgesetzten anderen Kranantrieben umfasst.
- Verfahren nach einem der vorhergehenden Ansprüche, wobei eine mögliche Verschiebung des Gesamtschwerpunkts und eine damit einhergehende mögliche zukünftige Gesamtschwerpunktslage (y) durch eine auftretende, insbesondere maximal zulässige Windlast bestimmt wird.
- Verfahren nach dem vorhergehenden Anspruch, wobei eine mögliche Verschiebung des Gesamtschwerpunkts unter Zugrundelegung der Windlast aus zumindest einer bestimmten Windrichtung, insbesondere einer Windrichtung von hinten und/oder einer Windrichtung von der Seite, bestimmt wird.
- Verfahren nach einem der vorhergehenden Ansprüche, wobei eine mögliche Verschiebung des Gesamtschwerpunkts und eine damit einhergehende mögliche zukünftige Gesamtschwerpunktslage (y) in Folge einer Verformung des Krans (1) bestimmt wird.
- Verfahren nach einem der vorhergehenden Ansprüche, wobei eine mögliche Verschiebung des Gesamtschwerpunkts und ein damit einhergehender möglicher zukünftiger Gesamtschwerpunkt (y) durch den Einfluss der Massenkräfte aus Kranbewegungen, insbesondere aus einem Drehen, Heben und/oder Katzfahren, bestimmt wird.
- Verfahren nach einem der vorhergehenden Ansprüche, wobei eine mögliche Verschiebung des Gesamtschwerpunkts und eine damit einhergehende, mögliche zukünftige Gesamtschwerpunktslage (y) unter Berücksichtigung einer Zentrifugalkraft, die auf den Kran (1) und/oder die daran angeschlagene Hublast wirkt, bestimmt wird.
- Verfahren nach einem der vorhergehenden Ansprüche, wobei die Kippkante (20) und deren Lage und Ausrichtung relativ zur aufrechten Krandrehachse (18) in Abhängigkeit der Ausfahrweite der Stützen einer Bodenabstützung (19) bestimmt wird.
- Verfahren nach einem der vorhergehenden Ansprüche, wobei für eine jeweilige am Lasthaken (7) aufgenommene Hublast und/oder jeweils für beliebige am Lasthaken (7) aufgenommene Hublasten in Abhängigkeit der Kippkante (20) und deren Lage und in Abhängigkeit der bestimmten möglichen Verschiebungen des Gesamtschwerpunkts jeweils eine Ausladungsgrenze (21) bestimmt wird, die für verschiedene Drehstellungen des Krans (1) verschiedene Werte annimmt.
- Verfahren nach dem vorhergehenden Anspruch, wobei anhand der nicht kreisförmigen Ausladungsgrenze (21) für die jeweils am Lasthaken (7) aufgenommene Hublast ein Verfahren der Laufkatze (6) nach außen und/oder ein Abwippen des Auslegers (5) einerseits und ein Verdrehen des Krans um die aufrechte Krandrehachse (18) beschränkt wird.
- Kran, insbesondere Turmdrehkran, mit Antriebseinrichtungen (9, 10, 11, 12, 13, 14, 15) für Kran- und/oder Lastbewegungen, sowie einer Kransteuerung (16) zum Steuern der Antriebseinrichtungen, wobei die Kransteuerung (16) eine Überwachungseinrichtung (17) zum Überwachen der Kranbelastung und Beschränken von Kranbewegungen bei Erreichen von kritischen Kranbelastungen aufweist, wobei die genannte Überwachungseinrichtung (17) dazu ausgebildet ist, einen Gesamtschwerpunkt (x) des Krans mit einer daran gegebenenfalls angehängten Last auf seine Lage relativ zu einer Kippkante (20) des Krans (1) zu überwachen, dadurch gekennzeichnet, dass die Überwachungseinrichtung (17) dazu ausgebildet ist, mögliche Verschiebungen des Gesamtschwerpunkts (x) durch mögliche Änderungen verschiedener Betriebs- und/oder Einflussgrößen, die zumindest verschiedene Kranbewegungen umfassen, und sich hierdurch ergebende zukünftige Gesamtschwerpunktslagen (y) zu bestimmen, sowie aus den bestimmten mehreren zukünftigen Gesamtschwerpunktslagen (y) den bezüglich der Kippkante (20) kritischsten Gesamtschwerpunkt (xk) zu bestimmen und anhand der Lage dieses zukünftigen kritischsten Gesamtschwerpunkts (xk) relativ zur Kippkante (20) eine mögliche Beschränkung von Kranbewegungen zu bestimmen.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018129352.6A DE102018129352A1 (de) | 2018-11-21 | 2018-11-21 | Kran sowie Verfahren zum Überwachen des Betriebs eines solchen Krans |
| PCT/EP2019/081274 WO2020104282A1 (de) | 2018-11-21 | 2019-11-14 | Kran sowie verfahren zum überwachen des betriebs eines solchen krans |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3856673A1 EP3856673A1 (de) | 2021-08-04 |
| EP3856673B1 true EP3856673B1 (de) | 2022-11-02 |
Family
ID=68621251
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19806147.5A Active EP3856673B1 (de) | 2018-11-21 | 2019-11-14 | Kran sowie verfahren zum überwachen des betriebs eines solchen krans |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US12202712B2 (de) |
| EP (1) | EP3856673B1 (de) |
| CN (1) | CN113165855B (de) |
| BR (1) | BR112021009188A2 (de) |
| DE (1) | DE102018129352A1 (de) |
| ES (1) | ES2937812T3 (de) |
| WO (1) | WO2020104282A1 (de) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018129352A1 (de) | 2018-11-21 | 2020-05-28 | Liebherr-Werk Biberach Gmbh | Kran sowie Verfahren zum Überwachen des Betriebs eines solchen Krans |
| DE102021102699A1 (de) | 2021-02-05 | 2022-08-11 | Liebherr-Werk Biberach Gmbh | Kran |
| CN114044452B (zh) * | 2021-10-27 | 2023-06-23 | 浙江三一装备有限公司 | 作业机械作业控制方法、装置及作业机械 |
| DE102022116319A1 (de) * | 2022-06-30 | 2024-01-04 | Liebherr-Mischtechnik Gmbh | Verfahren zur Überwachung der Standsicherheit einer Arbeitsmaschine |
| FR3137908B1 (fr) * | 2022-07-12 | 2025-01-10 | Manitowoc Crane Group France | Procédé automatique pour la détermination lors d’un levage d’une position physique de fin de course d’un moufle d’une grue à tour |
| CN115432600A (zh) * | 2022-09-21 | 2022-12-06 | 中联重科股份有限公司 | 工程装备的防倾翻控制方法、处理器及控制装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005035729A1 (de) | 2005-07-29 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zum Betreiben eines Krans |
| DE202006017724U1 (de) * | 2006-11-21 | 2008-04-03 | Liebherr-Werk Ehingen Gmbh | Mobilkran |
| DE102008021627A1 (de) * | 2008-04-30 | 2009-11-12 | Liebherr-Werk Ehingen Gmbh | Mobilkran und Verfahren zum Betreiben eines Mobilkranes |
| CN102906347B (zh) * | 2010-05-24 | 2015-04-22 | 日立建机株式会社 | 作业机械的安全装置 |
| DE202010014309U1 (de) * | 2010-10-14 | 2012-01-18 | Liebherr-Werk Ehingen Gmbh | Kran, insbesondere Raupen- oder Mobilkran |
| CN102464270B (zh) * | 2010-11-11 | 2014-05-14 | 徐州重型机械有限公司 | 一种防倾翻力矩限制器系统及移动式起重机 |
| CN102910543B (zh) * | 2012-08-08 | 2014-10-15 | 三一集团有限公司 | 一种起重机及其防前倾翻保护方法和装置 |
| US9365398B2 (en) * | 2012-10-31 | 2016-06-14 | Manitowoc Crane Companies, Llc | Outrigger pad monitoring system |
| US10183848B2 (en) * | 2014-01-27 | 2019-01-22 | Manitowoc Crane Companies, Llc | Height adjustment mechanism for an auxiliary member on a crane |
| DE102014105618A1 (de) * | 2014-04-22 | 2015-10-22 | Terex Cranes Germany Gmbh | Verfahren und Vorrichtung zum Betreiben eines Mobilkrans sowie Mobilkran |
| DE202015001023U1 (de) * | 2015-02-09 | 2016-05-10 | Liebherr-Components Biberach Gmbh | Kran |
| DE102018129352A1 (de) | 2018-11-21 | 2020-05-28 | Liebherr-Werk Biberach Gmbh | Kran sowie Verfahren zum Überwachen des Betriebs eines solchen Krans |
-
2018
- 2018-11-21 DE DE102018129352.6A patent/DE102018129352A1/de not_active Withdrawn
-
2019
- 2019-11-14 CN CN201980076481.5A patent/CN113165855B/zh active Active
- 2019-11-14 EP EP19806147.5A patent/EP3856673B1/de active Active
- 2019-11-14 BR BR112021009188-2A patent/BR112021009188A2/pt not_active IP Right Cessation
- 2019-11-14 ES ES19806147T patent/ES2937812T3/es active Active
- 2019-11-14 WO PCT/EP2019/081274 patent/WO2020104282A1/de not_active Ceased
-
2021
- 2021-05-21 US US17/327,449 patent/US12202712B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| ES2937812T3 (es) | 2023-03-31 |
| CN113165855A (zh) | 2021-07-23 |
| US12202712B2 (en) | 2025-01-21 |
| EP3856673A1 (de) | 2021-08-04 |
| DE102018129352A1 (de) | 2020-05-28 |
| WO2020104282A1 (de) | 2020-05-28 |
| CN113165855B (zh) | 2025-05-30 |
| US20210276840A1 (en) | 2021-09-09 |
| BR112021009188A2 (pt) | 2021-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3856673B1 (de) | Kran sowie verfahren zum überwachen des betriebs eines solchen krans | |
| EP3219662B1 (de) | Verfahren zum ermitteln der tragfähigkeit eines krans sowie kran | |
| EP2674384B1 (de) | Verfahren zur Überwachung der Kransicherheit sowie Kran | |
| WO2015162096A1 (de) | Verfahren und vorrichtung zum betreiben eines mobilkrans sowie mobilkran | |
| EP3507232B1 (de) | Turmkran | |
| DE102017117662A1 (de) | Verfahren zum Heben und/oder Senken eines Lastaufnahmemittels eines Hebezeugs, insbesondere eines Krans, und Hebezeug hierfür | |
| WO2003040016A1 (de) | Fahrzeugkran mit superlifteinrichtung | |
| DE10245868A1 (de) | Verfahren und Vorrichtung zur Positionierung einer Last | |
| DE112020006887B4 (de) | Kran | |
| DE19931302B4 (de) | Kontinuierlich verstellbarer Kran | |
| DE69729359T2 (de) | Mobilkran | |
| DE102015006117A1 (de) | Verfahren zum Betrieb eines Krans und Kran | |
| DE102014012661B4 (de) | Verfahren zum Betrieb eines Krans und Kran | |
| EP2847121B1 (de) | Kran | |
| WO2022167589A1 (de) | Kran | |
| EP4263413B1 (de) | Hebezeug | |
| EP4053065B1 (de) | Vorrichtung und verfahren zur steuerung eines krandrehwerks sowie kran | |
| DE102009007776A1 (de) | Steuerung für eine verstellbare Auslegerverlängerung eines Mobilkrans | |
| DE102017202009A1 (de) | Kran | |
| EP3943440A1 (de) | Hydrauliksystem für eine rückfallstütze und arbeitsgerät | |
| DE3337445A1 (de) | Belastungswaechter mit momentkapazitaetsbegrenzer zur verwendung in einem hydraulikkreis | |
| AT524468B1 (de) | Verfahren zum Betrieb eines Krans und Kran | |
| DE29924978U1 (de) | Kontinuierlich verstellbarer Kran | |
| EP4516718B1 (de) | Verfahren zur traglastüberwachung eines krans mit zwei lastaufnahmemitteln | |
| DD268458A1 (de) | Auslegerkran mit gegenausleger |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20210428 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: DANGEL, ALEXANDER Inventor name: FAKLER, MANFRED |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20220530 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1528635 Country of ref document: AT Kind code of ref document: T Effective date: 20221115 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502019006168 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2937812 Country of ref document: ES Kind code of ref document: T3 Effective date: 20230331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230302 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230202 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230302 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230203 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502019006168 Country of ref document: DE |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221114 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20230803 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20191114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221102 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: U11 Free format text: ST27 STATUS EVENT CODE: U-0-0-U10-U11 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251201 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20251127 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20251201 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20251125 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20251124 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20251128 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20251201 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20251201 Year of fee payment: 7 |