EP3957595B1 - Commande de grue destinée à la commande automatisée des actionneurs de grue - Google Patents
Commande de grue destinée à la commande automatisée des actionneurs de grue Download PDFInfo
- Publication number
- EP3957595B1 EP3957595B1 EP21168861.9A EP21168861A EP3957595B1 EP 3957595 B1 EP3957595 B1 EP 3957595B1 EP 21168861 A EP21168861 A EP 21168861A EP 3957595 B1 EP3957595 B1 EP 3957595B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- crane
- target position
- positioner
- control system
- crane control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/82—Luffing gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/48—Automatic control of crane drives for producing a single or repeated working cycle; Program control
Definitions
- the present invention relates to a crane control system which controls one or more signal boxes of a crane in such a way that the signal box or boxes in question are moved to a desired target position without the crane operator having to enter corresponding control commands.
- Cranes in general and mobile cranes in particular have a large number of signal boxes to carry out the necessary crane movements, which are connected to an operating device for the crane operator via a crane control system. Control commands entered by the crane operator via the operating device are thus converted by the crane control system into corresponding signals for the signal boxes.
- the same adjustment movements must always be carried out to move the crane from a transport configuration to an operating configuration or from an operating configuration back to the transport configuration.
- these adjustment movements must be carried out in reverse order to prepare the crane for road transport.
- the WO 2015/113084 A1 discloses a crane control for a crane with a first and a second operating mode, wherein in the second operating mode the Crane geometry can be changed in a predetermined sequence of movements by the crane control.
- the WO 2015/113084 A1 discloses a crane control according to the preamble of independent claim 1.
- the EP 3 556 709 A1 discloses a system for the automatic movement of a crane articulated arm.
- the EN 10 2016 015 388 A1 discloses a method for assisted execution of crane movements of a crane with at least two boom elements that can be moved relative to one another.
- WO 2015/021558 A1 discloses a system and a method for operating a crane, wherein previous movement sequences of the crane can be repeated.
- the present invention has the object of relieving the crane operator's workload. This object is achieved by the subject matter of independent claim 1 and the subordinate claim 8.
- the crane control according to the invention only receives an input from the crane operator with which he gives the crane control a release to send control signals to one or more signal boxes so that they move to a predefined target position.
- the crane control system receives a target position to be approached from at least one signal box before it receives the release from the crane operator to use control signals to cause the corresponding signal boxes to approach the desired target position.
- the control of signal boxes on a crane superstructure is just as conceivable as the control of signal boxes on a crane undercarriage.
- this would particularly include support and/or sliding cylinders on a crane support.
- a desired support beam position could be preselected via user input, which is then moved to by the sliding cylinders of the support beams.
- the support cylinders can then extend automatically and the vehicle can be leveled. The release for this could be made, for example, by continuously pressing a button on a keypad.
- target position used here should be understood in the case of cable drums, hydraulic motors and similar control systems that pass through individual positions many times to mean that the elements influenced by them, such as cables or liquid volumes, are operated in the desired manner. In the case of cable drums, this does not mean the absolute angular position of the cable drum itself, but rather the desired length of cable wound up or unwound.
- the transport position of a crane boom to be provided for road transport defines a target position of at least one signal box.
- the target position or the data describing it can be permanently stored in the crane control system, for example on a non-volatile storage medium.
- a ready-to-use position of the crane boom defines a target position of at least one signal box. While the target positions required for such a ready-to-use position of the crane boom or the data describing them are also permanently stored in the crane control system It is also conceivable that the crane control system provides the option of user-defined target positions for one or more signal boxes. For example, several crane operators can define different, preferred positions of the crane boom as the preferred operational position to which the crane boom should automatically move at the start of use.
- the crane control defines a target position of at least one signal box based on a user input, which is entered, for example, via an operating device. It is conceivable that the crane operator first enters the desired values for the luffing angle, the swivel angle, the telescoping length and/or the hoist rope length via a keypad or similar operating elements.
- the current position of at least one signal box can be defined as a target position, for example by the crane operator pressing a button. In this way, a specific boom position can be approached exactly again at a later point in time.
- the crane operator can, so to speak, readjust a previously defined target position, which is particularly advantageous if the crane's environment changes or develops during use.
- the second case it is possible to interrupt the predefined approach to the target position and resume it at any later time.
- the present invention provides that the crane control system only outputs the control data as long as the user operates an operating device.
- a control element is permanently must be operated, for example a joystick must be permanently swiveled in any direction or in a predefined direction.
- the direction of operation of the control element does not necessarily have to match the direction of the actuating movement to be carried out by the control box.
- the crane operator can permanently "pull" a joystick, whereby the crane boom moves towards the desired target position as long as the joystick remains pulled. As soon as the operating element or joystick is released, the crane control stops the actuating movements.
- At least one second signal box is controlled automatically by the crane control in parallel in the manner described above, i.e. without any specific control by the crane operator.
- the crane operator can use the operating device to control the telescoping cylinder to extend or retract the boom in a conventional manner, while the hoist cable winch is automatically controlled by the crane control in such a way that the hoist cable is wound up or unwound according to the length of the boom.
- the "target position" for the hoist winch can therefore be defined by the hoist cable length that is necessary to keep the hook block at a predefined distance from the boom head.
- the crane control can update a target position of at least one signal box continuously or at predetermined time intervals.
- the deflection of the crane boom and/or the position of the load can be taken into account here.
- the current target position can depend purely on the position of the signal boxes directly controlled by the crane operator.
- the target position of the hoist winch can depend on the position of the luffing cylinder and/or the telescoping length.
- the crane control records the actuation of at least one signal box, in particular a sequence of the actuation of several signal boxes over a time interval.
- the recorded signal box actuations can then be converted by the crane control into corresponding control signals at a later point in time in order to actuate the signal box or boxes again in an identical manner.
- the present invention further relates to a crane, in particular a mobile crane, which comprises a crane control according to one of the embodiments described above.
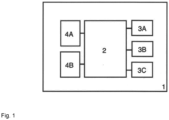
- the Figure 1 shows a block diagram of a mobile crane 1, which comprises a crane control 2 according to the present invention.
- the crane control 2 is connected on the one hand to a keypad 4A and a joystick 4B, which together form a human-machine interface 4 of the mobile crane 1.
- the crane control 2 is connected to several control boxes 3A, 3B, 3C of the mobile crane 1.
- the block 3A represents a telescoping cylinder, the block 3B a luffing cylinder and the block 3C the hoist of the mobile crane 1.
- the crane control 2 enables automatic assembly and disassembly of the crane 1.
- the telescopic boom of the Crane 1 can be brought from a transport position supported on the crane undercarriage into an operational position with predefined values for the luffing angle, the swivel angle and the telescoping length by the crane operator simply "pulling" the control stick 4B.
- the predefined values for the luffing angle, the swivel angle and the telescoping length can, for example, be stored in a non-volatile memory of the crane control 2, or can be entered beforehand by the crane operator via the keypad 4A.
- the rigging movement can be defined in such a way that the crane boom is first raised from its support block on the crane undercarriage by actuating the luffing cylinder 3B and brought to a predefined luffing angle.
- the crane control 2 can then control an undesignated slewing gear on the crane uppercarriage, which brings the crane boom to a predefined swivel angle.
- the crane control can then actuate the telescoping cylinder 3A and an associated locking head in such a way that the crane boom is telescoped out to a predefined telescoping length.
- the crane control 2 controls the hoist 3C in such a way that the crane hook block is held in a constant position relative to the boom head.
- Adjustment movements of the telescoping cylinder 3A, the luffing cylinder 3B and the Figure 1 The rotation of the rotating mechanism (not shown) can take place in parallel, at least in sections.
- the crane operator To dismantle the crane from any position of the crane boom into a transport position supported on the crane undercarriage, the crane operator only needs to pull the joystick 4B so that the crane control 2 controls the respective signal boxes 3A, 3B and 3C in such a way that they accept the control values for the transport position stored in the non-volatile memory.
- the crane control enables a crane operator to start a recording mode using the keypad 4A, so that the signal box movements he causes using the joystick 4B are recorded.
- the crane operator can, for example, in a playback mode started via an input on the keypad 4A, cause the crane control 2 to play back the previously recorded signal box movements - starting from a recorded starting point. This relieves the crane operator of the task of controlling recurring signal box movements.
- the crane operator can enter a desired target lifting height of the load attached to the boom via the keypad 4A or define a currently prevailing load lifting height as the target lifting height. While the crane operator then initiates any adjustment movements of the telescoping cylinder 3A and the luffing cylinder 3B, the crane control 2 always adjusts the crane hook block by automatically operating the hoist 3C so that the previously defined height of the load relative to the ground or the crane undercarriage remains constant.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Control And Safety Of Cranes (AREA)
- Jib Cranes (AREA)
Claims (8)
- Commande de grue destinée à la commande d'actionneurs (3A, 3B, 3C) d'une grue (1), ladite commande de grue (2) étant conçue pour réaliser les fonctions suivantes :- recevoir des données de position cible qui décrivent une position cible prédéfinie d'au moins un actionneur (3A, 3B, 3C),- recevoir des données de confirmation qui décrivent une entrée utilisateur servant à confirmer un passage de l'au moins un actionneur (3A, 3B, 3C) à la position cible prédéfinie,- délivrer des données de commande qui décrivent des signaux de commande à transmettre à l'au moins un actionneur (3A, 3B, 3C) afin de faire prendre à l'au moins un actionneur (3A, 3B, 3C) ladite position cible prédéfinie ;caractérisée en ce que les données de commande sont délivrées tant qu'un dispositif de commande (4A, 4B) est actionné par l'utilisateur pour actionner au moins un autre actionneur (3A, 3B, 3C).
- Commande de grue selon la revendication 1, dans laquelle la position de transport d'une flèche de grue définit une position cible d'au moins un actionneur (3A, 3B, 3C).
- Commande de grue selon l'une des revendications 1 et 2, dans laquelle une position opérationnelle d'une flèche de grue définit une position cible d'au moins un actionneur (3A, 3B, 3C).
- Commande de grue selon l'une des revendications 1 à 3, dans laquelle au moins une entrée utilisateur effectuée par le biais d'un dispositif de commande (4A, 4B) définit une position cible d'au moins un actionneur (3A, 3B, 3C), la position actuelle d'au moins un actionneur (3A, 3B, 3C) définissant notamment ladite position cible.
- Commande de grue selon l'une des revendications 1 à 4, laquelle la commande de grue (2)- permet une entrée utilisateur visant à modifier la position cible, ladite position modifiée étant notamment définie comme nouvelle position cible, et/ou- permet une entrée utilisateur visant à interrompre l'avancée en position cible, étant entendu notamment que, pour la reprise de l'avancée en position cible, au moins un actionneur (3A, 3B, 3C) est ramené dans la position qu'il occupait au moment de ladite interruption.
- Commande de grue selon l'une des revendications 1 à 5, laquelle commande de grue (2) actualise une position cible d'au moins un actionneur (3A, 3B, 3C) en continu ou à intervalles, en tenant compte notamment de la flexion de la flèche de grue et/ou de la position de la charge.
- Commande de grue selon l'une des revendications 1 à 6, laquelle commande de grue (2) est conçue pour enregistrer l'actionnement d'au moins un actionneur (3A, 3B, 3C), notamment d'une séquence d'actionnement de plusieurs actionneurs (3A, 3B, 3C) au cours d'un intervalle de temps afin de fournir à l'au moins un actionneur (3A, 3B, 3C), à un moment ultérieur, des signaux de commande correspondants audit enregistrement.
- Grue, notamment mobile, dotée d'une commande de grue (2) selon l'une des revendications 1 à 7.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE202020104793.0U DE202020104793U1 (de) | 2020-08-19 | 2020-08-19 | Kransteuerung zur automatisierten Ansteuerung von Kran-Stellwerken |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3957595A1 EP3957595A1 (fr) | 2022-02-23 |
| EP3957595B1 true EP3957595B1 (fr) | 2024-06-19 |
Family
ID=72518451
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21168861.9A Active EP3957595B1 (fr) | 2020-08-19 | 2021-04-16 | Commande de grue destinée à la commande automatisée des actionneurs de grue |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12221326B2 (fr) |
| EP (1) | EP3957595B1 (fr) |
| DE (1) | DE202020104793U1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021106746A1 (de) | 2021-03-19 | 2022-09-22 | Liebherr-Werk Nenzing Gmbh | Mobilkran mit einer Vorrichtung zum Unterstützen oder vollautomatischen Durchführen eines Aufricht- und/oder Ablegevorgangs eines Derrickauslegers sowie entsprechendes Verfahren |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015113084A1 (fr) * | 2014-01-31 | 2015-08-06 | Palfinger Ag | Commande de grue |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015021558A1 (fr) * | 2013-08-16 | 2015-02-19 | Tot Holdings Inc. | Système et procédé de chargeur de tuyaux |
| DE102016004249A1 (de) | 2016-04-08 | 2017-10-12 | Liebherr-Components Biberach Gmbh | Kran |
| DE102016015388B4 (de) * | 2016-12-22 | 2024-09-12 | Liebherr-Werk Ehingen Gmbh | Verfahren zur assistierten Ausführung von Kranbewegungen eines Krans sowie Kran |
| DK179958B1 (en) | 2018-04-13 | 2019-11-04 | Hmf Group A/S | Crane and Method for Operating a Crane |
| IT201800004719A1 (it) * | 2018-04-19 | 2019-10-19 | Sistema per la movimentazione automatica di un braccio articolato, in particolare di una gru articolata | |
| JP7263964B2 (ja) * | 2019-07-30 | 2023-04-25 | 株式会社タダノ | コントローラ、ブーム装置、及びクレーン車 |
-
2020
- 2020-08-19 DE DE202020104793.0U patent/DE202020104793U1/de active Active
-
2021
- 2021-04-16 EP EP21168861.9A patent/EP3957595B1/fr active Active
- 2021-08-16 US US17/403,433 patent/US12221326B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015113084A1 (fr) * | 2014-01-31 | 2015-08-06 | Palfinger Ag | Commande de grue |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220055871A1 (en) | 2022-02-24 |
| US12221326B2 (en) | 2025-02-11 |
| DE202020104793U1 (de) | 2020-08-27 |
| EP3957595A1 (fr) | 2022-02-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3099618B1 (fr) | Commande de grue | |
| DE10155006B4 (de) | Fahrzeugkran mit Superlifteinrichtung | |
| EP0187772B1 (fr) | Systeme de surveillance et de commande pour grues a fleche | |
| EP2139803B2 (fr) | Procédé pour assurer la commande d'un dispositif de déplacement de charge et commande de dispositif de déplacement de charge | |
| DE102016015388B4 (de) | Verfahren zur assistierten Ausführung von Kranbewegungen eines Krans sowie Kran | |
| EP2113481A1 (fr) | Grue mobile avec système de supervision | |
| DE102014012422A1 (de) | Automatisches Aufrichten eines Krans | |
| EP3713867B1 (fr) | Grue muni d'un dispositif anti-collision et procédé pour faire fonctionner plusieurs grues de ce type | |
| DE19931301B4 (de) | Verfahren und Vorrichtung zum Führen eines Kranlasthakens | |
| EP3957595B1 (fr) | Commande de grue destinée à la commande automatisée des actionneurs de grue | |
| DE19931302B4 (de) | Kontinuierlich verstellbarer Kran | |
| DE19781734B4 (de) | Ladegerät | |
| EP4339379A1 (fr) | Outil de travail doté d'une pince mécanique pour parois moulées et procédé de réalisation d'une étape de travail d'un tel outil | |
| EP0387399B1 (fr) | Procédé et dispositif pour la commande des fonctions d'une grue mobile à flèche télescopique | |
| DE102011101714A1 (de) | Verfahren einer elektrohydraulischen Hubwerksregelung und Bedieneinheit für eine elektrohydraulische Hubwerksregelung | |
| DE19808694C2 (de) | Verfahren und Vorrichtung zur Steuerung einer Hubarbeitsbühne | |
| EP2216285A1 (fr) | Commande pour un allongement réglable du bras d'une grue mobile | |
| EP2402281B1 (fr) | Procédé destiné au fonctionnement d'une grue à tour | |
| EP3219660B1 (fr) | Grue à fixer sur un engin de travail mobile pour travaux forestiers | |
| DE102012018392A1 (de) | Verfahren zum Betrieb eines Krans und Kran | |
| EP4059879A1 (fr) | Grue mobile dotée d'un dispositif permettant d'aider ou de mettre en uvre de manière automatique un processus de montage et/ou d'enlèvement d'une flèche derrick, ainsi que procédé correspondant | |
| EP4059878B1 (fr) | Appareil de levage doté d'un dispositif destiné au support ou à la mise en uvre entièrement automatique d'un processus de levage et/ou de pose d'un système de flèche, ainsi que procédé correspondant | |
| EP1472174B1 (fr) | Grue munie d'unites d'introduction manuelle | |
| EP2567929B1 (fr) | Dispositif de treuil de câble | |
| EP4148187B1 (fr) | Procédé de démarrage d'une position cible d'un équipement de travail d'une machine de travail et machine de travail |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20220426 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20230824 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240130 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20240308 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502021004030 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240920 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240919 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240920 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240919 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241019 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241019 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502021004030 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20250320 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250422 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250423 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250424 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250425 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250721 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: H13 Free format text: ST27 STATUS EVENT CODE: U-0-0-H10-H13 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250416 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240619 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20250430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250416 |