EP4033197A1 - Dispositif anti-drone basé sur la projection de momentum cinétique et linéaire - Google Patents
Dispositif anti-drone basé sur la projection de momentum cinétique et linéaire Download PDFInfo
- Publication number
- EP4033197A1 EP4033197A1 EP21020025.9A EP21020025A EP4033197A1 EP 4033197 A1 EP4033197 A1 EP 4033197A1 EP 21020025 A EP21020025 A EP 21020025A EP 4033197 A1 EP4033197 A1 EP 4033197A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- target
- kinetic
- axe
- launching
- flying
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 claims description 6
- 238000004891 communication Methods 0.000 claims description 2
- 238000004519 manufacturing process Methods 0.000 claims 1
- 230000006855 networking Effects 0.000 claims 1
- 230000002787 reinforcement Effects 0.000 claims 1
- 230000011664 signaling Effects 0.000 claims 1
- 230000001960 triggered effect Effects 0.000 claims 1
- 238000013473 artificial intelligence Methods 0.000 abstract description 6
- 241001465754 Metazoa Species 0.000 abstract 1
- 230000007246 mechanism Effects 0.000 description 11
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 230000009931 harmful effect Effects 0.000 description 2
- 230000000977 initiatory effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 238000009987 spinning Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 241000931526 Acer campestre Species 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- ZPUCINDJVBIVPJ-LJISPDSOSA-N cocaine Chemical compound O([C@H]1C[C@@H]2CC[C@@H](N2C)[C@H]1C(=O)OC)C(=O)C1=CC=CC=C1 ZPUCINDJVBIVPJ-LJISPDSOSA-N 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000007123 defense Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 230000003472 neutralizing effect Effects 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B12/00—Projectiles, missiles or mines characterised by the warhead, the intended effect, or the material
- F42B12/02—Projectiles, missiles or mines characterised by the warhead, the intended effect, or the material characterised by the warhead or the intended effect
- F42B12/34—Projectiles, missiles or mines characterised by the warhead, the intended effect, or the material characterised by the warhead or the intended effect expanding before or on impact, i.e. of dumdum or mushroom type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41H—ARMOUR; ARMOURED TURRETS; ARMOURED OR ARMED VEHICLES; MEANS OF ATTACK OR DEFENCE, e.g. CAMOUFLAGE, IN GENERAL
- F41H11/00—Defence installations; Defence devices
- F41H11/02—Anti-aircraft or anti-guided missile or anti-torpedo defence installations or systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41H—ARMOUR; ARMOURED TURRETS; ARMOURED OR ARMED VEHICLES; MEANS OF ATTACK OR DEFENCE, e.g. CAMOUFLAGE, IN GENERAL
- F41H11/00—Defence installations; Defence devices
- F41H11/08—Barbed-wire obstacles; Barricades; Stanchions; Tank traps; Vehicle-impeding devices; Caltrops
- F41H11/10—Dispensing-apparatus therefor, e.g. devices for dispensing or reeling barbed wire
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41H—ARMOUR; ARMOURED TURRETS; ARMOURED OR ARMED VEHICLES; MEANS OF ATTACK OR DEFENCE, e.g. CAMOUFLAGE, IN GENERAL
- F41H13/00—Means of attack or defence not otherwise provided for
- F41H13/0006—Ballistically deployed systems for restraining persons or animals, e.g. ballistically deployed nets
Definitions
- the present invention relates to an Anti-drone device, and more particularly to a method and an apparatus based on Kinetic and Linear Momentum Projection that disrupts the dynamic condition of the targeted vehicle, neutralizing it, and making it fall to the ground.
- Drones as the expression used to define the broad category of unmanned aerial vehicles, are getting cheaper and easier to use and acquire. Micro and small drones run the gamut from being nuisances in the wrong air space at the wrong time to being potential threats for a lot of menaces from intel collection to becoming a weapon itself. As the current technology development in artificial intelligence and drone capabilities is making swarming drones easier to coordinate, its integration to develop harmful operations against multiple objectives becomes an extreme threat.
- Anti-drone, guns, weapons, or other devices are any of a range of countermeasures designed to either destroy or immobilize a target drone.
- the object will be reach by the projection of a kinetic and linear momentum device that will interfere with the drone and jam it. As result of the jam, the drone will lose the fly capabilities and will come down to earth.
- the Kinetic and Linear Momentum Projection (KLiMom) device operates projecting its linear momentum characterized by its mass times flying speed and its kinetic momentum characterized by its inertia momentum times angular speed.
- the initial angular speed is 3600 rpm, and the inertia momentum is concentrated on the 40 x (46-53) mm cylinder of the initial configuration.
- the achievable range of the device will depend on the auxiliary elements utilized to support the initial projection of the device.
- the range will span from a few ten of meters to more than a kilometre.
- the Figure 1 presents a summary of the elements that configure the Anti-drone system.
- the different variants presented in the figure relates to the automated versus manual launching capabilities and number of rounds per minute as well as achievable range for the device.
- Restrictions of use applies to the military for the top of the game systems, being unrestricted for private or residential use for the bottom of the game systems with its soft air propelled launch mechanism.
- Another object of the present invention is to provide the electronic and/or mechanical means to allow the device deployment in its final configuration as near the target as possible.
- Another object of the present invention is to provide the necessary arrangements to the device to fit with the different launchers and propellers in the 40 mm category that would be used in the different operational and final user scenarios.
- the launchers elements of the system are represented at 101,102,103, and 104. These elements go from the most powerful 101 limited to high end military market to the one focused on private/individual markets 104. In the 101 numeral is depicted an automatic grenade launcher capable to shot 200 till 450 rounds per minute and an effective range of 1500 metres. This machine is restricted for military use and has additional support of advance automated tracking and shutting capabilities. It can handle swarms of hundreds of drones without problem.
- Numeral 102 presents a handheld grenade launcher also capable to shoot a few rounds automatically. Also focused on the military and defence operations it is capable to achieve targets at distances till 500 metres.
- Numeral 103 is an equipment that is standard use in the police and security forces worldwide. The shooting is made one by one round and the range could reach 150 metres.
- Numeral 104 is a working/plastic replica of the 103 element that could be used in domestic markets. Maximum range of these launchers is in the order of 30 metres.
- the propulsion elements are depicted at 105, 106, 107, and 108.
- Numeral 105 represents a high velocity and 106 a low velocity, point initiating, base detonating fuse propulsion grenade to be used with elements 101 and 102, respectively.
- the initial speeds for these elements run from 200-240 m/s for the highspeed to 100-120 m/s for the low-speed ones.
- Numeral 106 depicts a low velocity propulsion for use with the 103 elements with initial speed of 78-84 m/s.
- Numeral 107 is the propulsion system for use with 104 element that achieves initial speeds of 25-35 m/s by means of soft air impulsion.
- the device object of the present invention is depicted in numeral 109 in the moment that is initiating the flight towards the target.
- the target is represented at numeral 110.
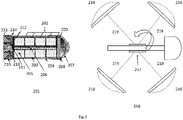
- the device element is shown in more detailed at Fig 2 .
- the initial configuration 201 of the device comprises several segments 202.
- the minimum number of segments are two for the 104/107 element, and the standard configurations for low and high velocity propulsion elements are four and six segments, respectively.
- Each segment is made of four pieces 203 each at 90 degrees that conforms the cylinder surface and are maintained together initially by the external container of the device 204. They exercise a pressure to the container by means of pressurized gas/spring mechanisms.
- Each piece is an aerodynamic surface that at launch time are arranged in the cylinder form.
- each segment is occupied by a coiled wire 205 that joins each of the aerodynamic surfaces with the axe of the device.
- the reels of the wire can turn freely around the axe of the device 206.
- the axe is attached to the ogive of the device 207. Within the ogive are contained the electronic boards with the appropriate sensors and circuits 208.
- the ogive seats initially at the external surface of the device 209.
- the trigger mechanism that liberates the ogive, axe and internal surface from the external part joining with the base of the device 210 are depicted in 211, 212, and 213. Spinning of the device is achieved at launch time exiting from the launcher tube by means of 214.
- Numeral 215 represents the join of the device with the launch projection element.
- the device is launched at a spin condition of 3600 rpm and near the target a trigger signal detach the external part of the device by means of 211, 212 and 213 and the elastic forces that maintained jointly the surfaces are liberated and the wires start to unroll.
- Final configuration as depicted in numeral 216 for one segment 217, shows the four surfaces 218 spinning attached to the full length of the wires 219 and conserving the kinetic momentum of the initial configuration. (The figure is not at scale).
- any of the wires with the drone will trigger the transfer of the combined kinetic momentum and linear momentum of the device to the target disrupting its flying conditions and pushing it to earth.
- the transformation of the configuration of the device is trigged by an automated mechanical time delay mechanism or an artificial intelligence operated mechanism contained in the ogive of the device. First one is used with the elements 102, 103 and 104 and the second one is used with the elements 101 and 102.
- the objective is that the device must be fully deployed in a range of 10-30 metres to the target.
- Deployment time will take less than one second.
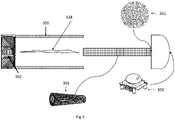
- FIG 3 shows the arrangements for the mechanical/artificial intelligence operated trigger mechanism.
- Numeral 301 refers to the external part of the device that has no more intervention in the capture process after separation.
- Numeral 302 is the join reference to numerals 211, 212, and 213 of figure 2 .
- the axe also contains the communication mechanism 304 that transfer the signals from the ogive place electronics to the trigger mechanism.
- the trigger mechanism for the bottom of the game devices will be simply a mechanical arrangement that at the time of launch will also trigger the expulsion of the internal part of the device with or without a prescheduled time delay.
- the numeral 305 refers a stack containing a microphone as sensor that allow determinate the distance by kind of sonar artificial intelligence model and numeral 306 pictured a passive infrared radar sensor that will be mounted at the tip of the ogive (infrared radome type). Any other sensor will be also considered for advanced strategies of deployment.
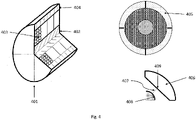
- FIG 4 presents the details of one segment 401 showing one of the surfaces detached. They are depicted sections of the axe 402, the four coils containing the wires rolled with the detailed wires of one of them 403, and the aerodynamic surface 404. The coils will turn freely around the axe of the ogive and base composite of the device.
- Numeral 405 shows the surfaces before the deployment and 406 after the deployment.
- the deployment of the aerodynamic surfaces is achieved not only by the action of the centripetal forces nor by the compressed air/springs which fill the surfaces, once they liberated due to the expulsion of the external cover at the signal trigger time.
- the wires 407 are attached to the ring 408 that turns freely around the axe and to the middle of the surface 409.
- the elements off the picture are not at scale.
- the length of the wires as well as the material composition of them will varied accordingly with the target and the rest of the elements of the system.
- Normalized lengths of the wires will be 2,5 meters for the bottom of the game systems to 6 metres for the top of the game.
- the materials of the wire will be from nylon wires for the bottom of the game to strong metals for the top of the game. Diameters of the wired will also varied from 0.25 to 1 millimetre.
- the table at figure 5 presents the overall characteristics of the system for all the different configurations.
- the fourth column reflects the initial and final angular speeds, and in the fifth column degrees refers to the separation between adjacent wires.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Toys (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21020025.9A EP4033197A1 (fr) | 2021-01-21 | 2021-01-21 | Dispositif anti-drone basé sur la projection de momentum cinétique et linéaire |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21020025.9A EP4033197A1 (fr) | 2021-01-21 | 2021-01-21 | Dispositif anti-drone basé sur la projection de momentum cinétique et linéaire |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4033197A1 true EP4033197A1 (fr) | 2022-07-27 |
Family
ID=74205608
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21020025.9A Withdrawn EP4033197A1 (fr) | 2021-01-21 | 2021-01-21 | Dispositif anti-drone basé sur la projection de momentum cinétique et linéaire |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4033197A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU226203U1 (ru) * | 2024-03-20 | 2024-05-27 | Валерий Викторович Присухин | Устройство для стрельбы патронами с помощью подствольного гранатомёта |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008145328A1 (fr) * | 2007-05-31 | 2008-12-04 | Rheinmetall Waffe Munition Gmbh | Système d'interception |
| GB2537664A (en) * | 2015-04-22 | 2016-10-26 | David Down Christopher | A system for tangling a vehicle |
| US20170261292A1 (en) * | 2016-03-12 | 2017-09-14 | Kestrel Science and Innovation, LLC | Interdiction and recovery for small unmanned aircraft systems |
| US10197365B1 (en) | 2017-10-20 | 2019-02-05 | The United States Of America As Represented By The Secretary Of The Army | Scalable effects net warhead |
| RU2680558C1 (ru) * | 2017-06-16 | 2019-02-22 | Геннадий Витальевич Чередников | Способ увеличения вероятности преодоления зон противоракетной обороны |
| US20190129427A1 (en) * | 2016-07-20 | 2019-05-02 | Prodrone Co., Ltd. | Unmanned aerial vehicle and moving object capturing system |
| US20200108925A1 (en) * | 2018-10-03 | 2020-04-09 | Sarcos Corp. | Countermeasure Deployment System Facilitating Neutralization of Target Aerial Vehicles |
-
2021
- 2021-01-21 EP EP21020025.9A patent/EP4033197A1/fr not_active Withdrawn
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008145328A1 (fr) * | 2007-05-31 | 2008-12-04 | Rheinmetall Waffe Munition Gmbh | Système d'interception |
| GB2537664A (en) * | 2015-04-22 | 2016-10-26 | David Down Christopher | A system for tangling a vehicle |
| US20170261292A1 (en) * | 2016-03-12 | 2017-09-14 | Kestrel Science and Innovation, LLC | Interdiction and recovery for small unmanned aircraft systems |
| US20190129427A1 (en) * | 2016-07-20 | 2019-05-02 | Prodrone Co., Ltd. | Unmanned aerial vehicle and moving object capturing system |
| RU2680558C1 (ru) * | 2017-06-16 | 2019-02-22 | Геннадий Витальевич Чередников | Способ увеличения вероятности преодоления зон противоракетной обороны |
| US10197365B1 (en) | 2017-10-20 | 2019-02-05 | The United States Of America As Represented By The Secretary Of The Army | Scalable effects net warhead |
| US20200108925A1 (en) * | 2018-10-03 | 2020-04-09 | Sarcos Corp. | Countermeasure Deployment System Facilitating Neutralization of Target Aerial Vehicles |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU226203U1 (ru) * | 2024-03-20 | 2024-05-27 | Валерий Викторович Присухин | Устройство для стрельбы патронами с помощью подствольного гранатомёта |
| RU2833334C1 (ru) * | 2024-03-20 | 2025-01-17 | Валерий Викторович Присухин | Устройство для стрельбы патронами с помощью подствольного гранатомёта |
| RU227995U1 (ru) * | 2024-04-12 | 2024-08-12 | Валерий Вазгенович Георгиади | Устройство для стрельбы охотничьими патронами из подствольного гранатомета |
| RU227995U9 (ru) * | 2024-04-12 | 2025-11-12 | Валерий Вазгенович Георгиади | Устройство для стрельбы охотничьими патронами из подствольного гранатомета |
| RU2832349C1 (ru) * | 2024-06-10 | 2024-12-23 | Николай Николаевич Лебедь | Надкалиберная пучковая граната к ручному гранатомету для поражения низколетящих воздушных целей |
| RU229809U1 (ru) * | 2024-07-29 | 2024-10-30 | Федеральное Государственное Казенное Военное Образовательное Учреждение Высшего Образования "Дальневосточное Высшее Общевойсковое Командное Ордена Жукова Училище Имени Маршала Советского Союза К.К. Рокоссовского" Министерства Обороны Российской Федерации | Вкладной ствол |
| RU2841453C1 (ru) * | 2024-12-16 | 2025-06-06 | Андрей Леонидович Кузнецов | Снаряд с накидками для поражения воздушных дронов |
| RU2841445C1 (ru) * | 2024-12-16 | 2025-06-06 | Андрей Леонидович Кузнецов | Снаряд с накидками для противодействия воздушным дронам |
| RU2844210C1 (ru) * | 2024-12-16 | 2025-07-28 | Андрей Леонидович Кузнецов | Боеприпас с накидками для противодействия воздушным дронам |
| RU2845744C1 (ru) * | 2024-12-16 | 2025-08-25 | Андрей Леонидович Кузнецов | Боеприпас с накидками для поражения воздушных дронов |
| RU235397U1 (ru) * | 2025-05-05 | 2025-07-02 | Не публикуется в соответствии с постановлением Правительства РФ от 2 сентября 2024 г. N 1209 | Устройство разрушения волоконно-оптической линии связи беспилотного летательного аппарата |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11753160B2 (en) | Unmanned aerial vehicle | |
| US9074858B2 (en) | Projectile-deployed countermeasure system | |
| US6626077B1 (en) | Intercept vehicle for airborne nuclear, chemical and biological weapons of mass destruction | |
| US8205537B1 (en) | Interceptor projectile with net and tether | |
| CN113406966B (zh) | 一种无人机的反制方法及无人机的反制系统 | |
| US20220170725A1 (en) | Visual guidance system for barrel-fired projectiles | |
| US20110252953A1 (en) | Rocket propelled barrier defense system | |
| WO2017160750A1 (fr) | Interdiction et récupération de systèmes d'aéronef sans pilote de petite taille | |
| US10731950B2 (en) | Vehicle defense projectile | |
| RU185949U1 (ru) | Устройство борьбы с беспилотными летательными аппаратами | |
| US11828573B2 (en) | Intelligent munition | |
| RU2326328C2 (ru) | Способ дистанционного поражения противника | |
| US20100313741A1 (en) | Applications of directional ammunition discharged from a low velocity cannon | |
| CN111879180A (zh) | 一种低空慢速小型目标低成本拦截系统及拦截方法 | |
| US5070790A (en) | Target marker to attract projectiles provided with a homing head | |
| CN212253846U (zh) | 一种低空慢速小型目标低成本拦截系统 | |
| EP4033197A1 (fr) | Dispositif anti-drone basé sur la projection de momentum cinétique et linéaire | |
| RU2669881C1 (ru) | Беспилотная система активного противодействия БПЛА | |
| RU2733600C1 (ru) | Термобарический способ борьбы с роем малогабаритных беспилотных летательных аппаратов | |
| RU2745590C1 (ru) | Способ захвата воздушной цели сетью | |
| RU2601241C2 (ru) | Способ активной защиты летательного аппарата и система для его осуществления (варианты) | |
| Barnaby | Will there be a Nuclear War? | |
| RU2680919C1 (ru) | Мобильное активное устройство для защиты различных объектов от беспилотных управляемых самодвижущихся средств поражения | |
| AU2017228525B2 (en) | Unmanned aerial vehicle | |
| RU2859235C1 (ru) | Пневмосеткомёт |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20230128 |