EP4040921B1 - Segmentierte steuerungsanordnung - Google Patents
Segmentierte steuerungsanordnung Download PDFInfo
- Publication number
- EP4040921B1 EP4040921B1 EP22164853.8A EP22164853A EP4040921B1 EP 4040921 B1 EP4040921 B1 EP 4040921B1 EP 22164853 A EP22164853 A EP 22164853A EP 4040921 B1 EP4040921 B1 EP 4040921B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- unit
- data line
- line driver
- units
- lte
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/403—Bus networks with centralised control, e.g. polling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H15/00—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H39/00—Devices for locating or stimulating specific reflex points of the body for physical therapy, e.g. acupuncture
- A61H39/04—Devices for pressing such points, e.g. Shiatsu or Acupressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H7/00—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H7/00—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for
- A61H7/001—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for without substantial movement between the skin and the device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H7/00—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for
- A61H7/002—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for by rubbing or brushing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F13/00—Interconnection of, or transfer of information or other signals between, memories, input/output devices or central processing units
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B3/00—Line transmission systems
- H04B3/02—Details
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05B—ELECTRIC HEATING; ELECTRIC LIGHT SOURCES NOT OTHERWISE PROVIDED FOR; CIRCUIT ARRANGEMENTS FOR ELECTRIC LIGHT SOURCES, IN GENERAL
- H05B47/00—Circuit arrangements for operating light sources in general, i.e. where the type of light source is not relevant
- H05B47/10—Controlling the light source
- H05B47/165—Controlling the light source following a pre-assigned programmed sequence; Logic control [LC]
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05B—ELECTRIC HEATING; ELECTRIC LIGHT SOURCES NOT OTHERWISE PROVIDED FOR; CIRCUIT ARRANGEMENTS FOR ELECTRIC LIGHT SOURCES, IN GENERAL
- H05B47/00—Circuit arrangements for operating light sources in general, i.e. where the type of light source is not relevant
- H05B47/10—Controlling the light source
- H05B47/175—Controlling the light source by remote control
- H05B47/18—Controlling the light source by remote control via data-bus transmission
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05B—ELECTRIC HEATING; ELECTRIC LIGHT SOURCES NOT OTHERWISE PROVIDED FOR; CIRCUIT ARRANGEMENTS FOR ELECTRIC LIGHT SOURCES, IN GENERAL
- H05B47/00—Circuit arrangements for operating light sources in general, i.e. where the type of light source is not relevant
- H05B47/20—Responsive to malfunctions or to light source life; for protection
- H05B47/21—Responsive to malfunctions or to light source life; for protection of two or more light sources connected in parallel
- H05B47/22—Responsive to malfunctions or to light source life; for protection of two or more light sources connected in parallel with communication between the lamps and a central unit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0161—Size reducing arrangements when not in use, for stowing or transport
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0192—Specific means for adjusting dimensions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1253—Driving means driven by a human being, e.g. hand driven
- A61H2201/1261—Driving means driven by a human being, e.g. hand driven combined with active exercising of the patient
- A61H2201/1284—Driving means driven by a human being, e.g. hand driven combined with active exercising of the patient using own weight
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1604—Head
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1614—Shoulder, e.g. for neck stretching
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1623—Back
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1683—Surface of interface
- A61H2201/1685—Surface of interface interchangeable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1683—Surface of interface
- A61H2201/169—Physical characteristics of the surface, e.g. material, relief, texture or indicia
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1683—Surface of interface
- A61H2201/169—Physical characteristics of the surface, e.g. material, relief, texture or indicia
- A61H2201/1695—Enhanced pressure effect, e.g. substantially sharp projections, needles or pyramids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2203/00—Additional characteristics concerning the patient
- A61H2203/04—Position of the patient
- A61H2203/0443—Position of the patient substantially horizontal
- A61H2203/0456—Supine
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/04—Devices for specific parts of the body neck
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/06—Arms
- A61H2205/062—Shoulders
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/08—Trunk
- A61H2205/081—Back
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/08—Trunk
- A61H2205/088—Hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
- A61H2205/106—Leg for the lower legs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
- A61H2205/108—Leg for the upper legs
Definitions
- the present invention is directed to a system arrangement for the fault-tolerant control of a plurality of execution units.
- the present invention advantageously allows execution units to be controlled in such a way that, among other things, both high common-mode robustness and high reliability are achieved, even with a large number of execution units.
- the present invention is directed to a method for operating or manufacturing the proposed system arrangement.
- a computer program product with control commands is proposed, which execute the method or operate the device.
- WO 2017/162 323 A1 shows an efficient control arrangement and a control method, wherein sequentially arranged execution units are controlled by means of an instruction unit.
- WO 2018/103 880 A1 shows a compact light-emitting diode arrangement which can be used generically, but is particularly advantageous for use in a vehicle due to its compact design.
- WO 2017/153 026 A1 shows a method for brightness compensation in at least one light-emitting diode.
- US 2014/333 207 A1 shows a protocol for exchanging status messages in a lighting system.
- US 8,492,983 B1 shows methods and systems for controlling lighting units.
- US 2004/160199 A1 shows lighting arrangements and in particular linear lighting arrangements and their configuration.
- US 2010/ 0188972 A1 shows a communication system with ring topology.
- EP 2 663 028 A1 shows a communication system that increases fault tolerance due to a fault line.
- US 2011/0309746 A1 shows a system arrangement with light-emitting diodes for use in an automobile.
- CAN protocol is significantly more complex than ISELED (registered trademark) and therefore more expensive.
- ISELED registered trademark
- the most significant disadvantage of CAN and LIN is that, due to their bus architecture, they do not offer a natural (automatic) addressing option.
- the address must be configured.
- ISELED execution units
- segmented ISELED line driver unit and execution units
- Different execution units are known from the state of the art. These typically operate as a so-called slave or client and receive commands from a higher-level instance, typically referred to as a master. The execution units then implement these commands.
- the state of the art shows different architectures and topologies for arranging the corresponding execution units and their control units.
- EMC electromagnetic compatibility
- This can lead to interference, which can either be prevented from the outset or rectified retrospectively.
- interference can occur when individual components fail due to the effects of force or heat, thus leading to subsequent failures.
- This is particularly problematic when units are connected in series and each unit receives commands from its predecessor.
- daisy chaining can cause problems if individual components are not connected in the event of a failure. This isolates the underlying sub-chain from the communication flow and subsequently fails.
- Very specific requirements also apply to a system arrangement that is to be installed in an automobile. Automobiles are generally high-priced products on which the customer is constantly dependent.
- the proposed invention provides, among other advantages, that the proposed segmentation also enables automatic address assignment to increase system-wide fault tolerance. Neither CAN nor LIN offers this advantage.
- the plurality of execution units, each segment preceded by only one line driver unit results in a positive ratio between the number of execution units and the number of line driver units. This enables automatic addressability, in contrast to CAN/LIN, with maximum fault tolerance and minimal complexity due to the simple protocol.
- the serial arrangement enables automatic addressability or address assignment, so that the execution units can each be addressed using their own address.
- the physical arrangement can take into account the subchain in which the respective execution unit is located. This can take into account which line driver unit is connected upstream of the respective execution unit.
- the commands are typically distributed by all line driver units to all execution units. This eliminates any filtering or processing in the line driver units.
- the execution units then decide whether or not to execute the command based on their own address and the address contained in the command. Typically, they execute the command if they are addressed by the address.
- the present invention advantageously allows execution units to be controlled in such a way that both high common-mode robustness and high reliability are achieved, even with a large number of execution units. It also offers the possibility of using line drivers that are optimal, for example, for optical or differential electrical physical media. Segmentation requires a small number of line driver units compared to the total number of execution units, allowing for higher current/power consumption and higher chip complexity than with the execution units.
- the proposed system arrangement is, among other things, fault-tolerant because the execution units are segmented and consequently arranged in sub-chains This creates serial subchains, with the individual execution units connected in series. Thus, if one execution unit fails, disruptions only occur within the subchain in which the failing execution unit is located. Compared to the prior art, this offers the advantage that, rather than a large number of other execution units connected in series failing, only execution units in the same segment fail. This can also be remedied by simply switching the execution units through in the event of a failure.
- the execution units are serially coupled, preferably bidirectionally. This makes it possible for the execution units to receive commands from the line driver unit and then implement them.
- a command can be an instruction, or it can also be a reading or setting of a parameter.
- the execution units can be configured as light-emitting diode units that control individual light-emitting diodes. Light-emitting diodes are typically red, green, and blue, although a white light-emitting diode can also be provided.
- the execution units therefore implement the commands from the line driver unit and are also capable of providing a return value. This makes it possible for the line driver unit to instruct the execution unit to read a sensor, and using bidirectional communication, the execution unit can return a read temperature value from the sensor.
- the subchains contain at least one execution unit, with a line driver unit upstream of each subchain. Fault tolerance is also ensured by the line driver units passing signals through in the event of an inactive state. Passing through generally describes the forwarding of signals without processing them. Consequently, no logic is implemented or processing steps carried out within the failed element. Rather, a signal present at an input is output again at the output without any processing.
- Electromagnetic compatibility when controlling a large number of execution units can be achieved, among other things, by always providing differential modulation, i.e. the line is actively driven even when no command is being transmitted. This eliminates the steep edge that occurs when the line driver is switched on and off.
- a cable connection optical or electrically differential
- the data line is not implemented on a circuit board as is conventional; instead, the individual sub-chains are simply arranged on a circuit board, and the resulting circuit boards can be communicatively coupled via the respective line driver unit using a cable connection (optical or electrically differential). It is therefore particularly advantageous that the number of sub-chains scales because any number of line driver units can be connected in series, and a sub-chain of execution units is communicatively arranged or coupled to each line driver unit.
- the number of execution units or line driver units to be operated is limited by the address space, i.e., the number of units that can be addressed. Since the address space can be chosen arbitrarily, the number of units to be installed also scales.
- the proposed system arrangement also provides, among other things, an instruction unit, which ultimately controls the individual execution units. This typically does not occur directly, but via the line driver units.
- the instruction unit generates instructions and transmits them to the execution units via the respective line driver units, or receives parameters and values from the execution units via the line driver units.
- the instruction unit thus represents a higher-level instance with regard to the line driver units and can therefore be referred to as a master unit.
- the line driver units behave as slave units or client units. Since the line driver units are connected upstream of the subchains, i.e. the execution units, and the line driver units transmit the instructions to the respective subchains, the line driver units behave in this respect like master units vis-à-vis the execution units. The execution units then assume the role of the slave unit or client unit.
- the proposed system arrangement is a chain of LEDs.
- the command unit outputs a specific pattern, which is to be implemented by the individual LEDs.
- the command unit controls the individual line driver units, which then forward the command to the respective subchain.
- the line driver units can not only forward the command, but also adapt the command independently.
- the individual execution units ultimately implement the command and, for example, control individual LEDs. These can be red, green, and blue LEDs, although a white LED can also be optionally provided.
- the execution units can also be other actuators such as motors, matrix LEDs, sensors, temperature sensors, light sensors, or buttons.
- the first data line is the data line that forms subchains.
- the first data line connects the individual execution units and connects this chain of execution units to exactly one line driver unit.
- the data line first comprises a line driver unit, to which an execution unit is connected.
- additional execution units can be connected serially to this execution unit.
- the address space does not have to be fully utilized; rather, the address space merely represents an upper limit for the number of execution units that can be installed.
- the second data line connects the line driver units to each other serially and preferably bidirectionally.
- the command unit is the first unit connected to the second data line, followed by at least one line driver unit.
- the first data line can be referred to as a data line of a first type.
- first data lines there are as many first data lines as there are sub-chains.
- first data lines there are three sub-chains.
- the first data lines can be designed differently than the second data line, which is typically only present once.
- the first data line can be arranged on a circuit board and the second data line can be in the form of a cable, for example. This results in a particularly advantageous flexible structure that is particularly tailored to the application scenario in automobiles.
- the line driver unit connected upstream of a subchain acts as a master unit for the at least one execution unit of this subchain, and the at least one execution unit acts as a slave unit with respect to this line driver unit.
- the line driver unit thus provides an instruction that is passed through the subchain and executed and passed on by each execution unit.
- Once the instruction has been executed it is also possible to receive a result from the respective execution unit. to the preceding execution unit and then provide the final result to the line driver unit.
- bidirectional communication within the subchain is advantageous.
- the instruction is advantageously issued by the instruction unit and passed on, typically unchanged, to the execution units via the line driver units.
- the command unit acts as a master unit for the line driver units, and the line driver units act as slave units with respect to the command unit.
- the line driver units thus receive this command or these commands and forward them, if necessary, unchanged or adapted, to the execution units.
- the first data line and/or the second data line are bidirectional.
- This has the advantage that commands or signals are transmitted in both directions, and consequently, both the execution units can send return values to the line driver units, and the line driver units can send signals to the command unit.
- the individual units can communicate with each other.
- both data lines are bidirectional, although it is also possible for only the first data line or the second data line to be bidirectional. Since multiple data lines of the first type are present, It is also possible for the individual first data lines to be designed differently. Typically, however, all first data lines are designed the same.
- signals on the second data line are modulated with a greater amplitude than signals on the first data line.
- This has the advantage that longer distances can be covered error-free using the second data line.
- a higher amplitude means that the distinction between zero and one is clearer, and the signal modulation is therefore less prone to errors.
- This makes it possible to implement the first data line on a circuit board and the second data line using a cable line, which is then also modulated with a correspondingly greater amplitude due to the greater distance.
- signals on the second data line are modulated with an amplitude 10 times greater than signals on the first data line.
- the first data line and/or the second data line is an optical or an electrical data line.
- an electrical data line is preferably implemented.
- the first data line and/or the second data line is/are an electrical data line that always carries current.
- This has the advantage that differential transmission is always possible, and consequently, there are no disadvantages of a particularly steep edge while the current is applied. Rather, a current is always present, and transient response is prevented.
- the proposed method is also insensitive to electromagnetic interference. Furthermore, choosing such a configuration is advantageous because it allows for the implementation of a cable connection that must cover longer distances of several meters.
- each line driver unit including a sub-chain, is arranged on its own circuit board.
- the line driver units including the execution units and the respective first data line, can be optimized for short distances and can therefore also be arranged on a single circuit board. This also reduces the susceptibility to errors, as the execution units are segmented, and individual sub-chains are addressed separately via circuit boards.
- the line driver units are each designed such that signals on the second data line in an inactive state of the respective line driver unit through this line driver unit.
- This offers the advantage that if one line driver unit fails, the other line driver units connected in series can still receive commands and send back signals. Thus, the defective line driver unit is simply masked out, and corresponding signals are passively passed through. Consequently, no signals are processed in the defective line driver unit, although this line driver unit does not interrupt the rest of the chain. It is therefore advantageous that if a line driver unit fails, only one subchain of several subchains fails.
- the execution units are configured to provide at least one piece of status information to the line driver unit.
- This has the advantage that the line driver unit can instruct that a specific value be read out, and then this instruction is passed through the subchain to the addressed execution unit, and this execution unit provides the requested value back via the other execution units. Bidirectional communication is particularly advantageous here.
- the object is also achieved by a method for the fault-tolerant control of a plurality of execution units, comprising providing an instruction unit, wherein the plurality of execution units is segmented into a plurality of serial sub-chains, each sub-chain having at least one execution unit along a first data line, and a line driver unit is connected upstream of each sub-chain, and the line driver units are serially communicatively coupled to one another by means of a second data line, and the first series-connected line driver unit is communicatively coupled to the instruction unit by means of the second data line, wherein signals on the second data line are modulated with an amplitude 10 times greater than signals on the first data line.
- the system arrangement provides structural features that functionally correspond to the method steps. Furthermore, method steps are proposed that can also be structurally replicated by the system arrangement with regard to the corresponding functionality. Thus, the method serves to operate the system arrangement, and the system arrangement can execute the proposed method.
- a microcontroller which acts, for example, as a command unit. Furthermore, several execution units are arranged via bidirectional communication, which in this case are implemented as LED controllers. This is indicated by the reference symbol MLED CTRL.
- MLED CTRL the reference symbol
- Fig. 1 shows a possible design of a system or communication arrangement according to the prior art.
- the command unit is visible, which is connected to three control units. Since the three control units are connected in series, the command unit directly connected to a control unit and indirectly connected to the other control units.
- the control units can be so-called multi-LED controllers. This is not Fig. 1 as MLED CTRL.
- the uniform reference symbol is intended to clarify in particular that the control units are typically designed identically.
- the light-emitting diodes are RGB (i.e. red, green, blue) light-emitting diodes. These are designed to set a specific color value by means of a mixing ratio of the individual light-emitting diode units.
- further components must be provided as required. For example, it may be necessary to provide a power supply. However, it is also possible to provide these components, for example the power supply, externally and simply connect them.
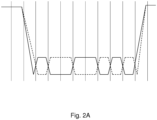
- Fig. 2A shows a modulation of data, whereby the data lines are only differentially modulated in the active phase when commands are transmitted.
- the inactive phase when no commands are transmitted, the current on both lines is switched off and both lines "drop" to a non-differential potential, which is typically assigned by a termination.
- the transition from the active phase (differential with high power consumption) to the inactive phase (non-differential, no power consumption) results in a steep edge.
- the vertical lines indicate a clocking, which serves to to read the signal's semantics.
- the signal is read within the clock cycle when the amplitude is at its maximum to achieve error robustness.
- the data shown can be synchronization data on the left side and a command on the right side.
- Fig. 2A exhibits a disadvantage in the prior art, namely the steep slope on the left side, which is not electromagnetically compatible.
- modulation is not very suitable for a cable connection.
- This modulation is suitable for a printed circuit board, which is why, according to the invention, transmission can only be carried out on the first data line. This is because a short connection prevails here and shielding is possible.
- Fig. 2B shows a superimposed signal and therefore shows two characteristics.
- the data line is always actively driven.
- the transmission of the command is done with a sequence of bits, which are differentially modulated as in Figure 2A .
- the data lines are not switched off after the command has been transmitted and continue to transmit a differential idle pattern. This is an aspect of data modulation that can also be used according to the invention. It is particularly advantageous that, without adapting the transmitter, the receiver not only avoids sampling at such unfavorable times, i.e., when the signal strength is close to the threshold, but also performs sampling at maximum Amplitude is measured.
- the sampling point in time is arranged within a bit width, which determines the time span within which the respective bit to be transmitted is encoded. Therefore, the sampling point in time must be selected within this bit width and reads out a bit assignment in each case.
- the individual bit widths, which divide the serial bit data stream into individual bits, are typically equidistant in time.
- An idle pattern is also referred to as an idle pattern.
- sampling times can be mid-bit width. For example, when changing from a coded zero to a coded one, the signal strength increases toward the beginning of the bit width, reaches its maximum approximately mid-bit width, and then decreases if a zero is subsequently to be coded.
- the mid-bit width can be chosen as a reference point for a suitable sampling time.
- Fig. 3 shows the proposed structure of a system arrangement, wherein the command unit BE is present as a microcontroller.
- This command unit BE is communicatively coupled to a plurality of line driver units LTE.
- the command unit BE is connected to the serially connected line driver units LTE via the second data line.
- each line driver unit LTE has three interfaces, namely interfaces A, B, and C.
- a line driver unit LTE communicates with a subchain of execution units AE.
- These execution units AE are also connected in series and communicate via the first data line.
- each subchain comprising a line driver unit LTE and at least one execution unit AE.
- data lines of the first type although only three subchains, i.e., three first data lines, are shown.
- the proposed system scales which is indicated by the dots drawn between the second subchain and the third subchain. These dots illustrate that multiple subchains can be present in an indefinite number. The number is limited only by the address space. The bottom right of the present Fig. 3 It is shown that different numbers of execution units (AE) can be provided, which is also indicated by dots. Here, too, the address space determines the number of execution units (AE).
- the first data line is drawn horizontally, and the second data line vertically.
- the second data line also refers to the connection between the command unit BE and the multiple line driver units LTE.
- the horizontal sub-chains can each be arranged on a circuit board, while a cable connection can be implemented between the vertical connections. This means that even larger distances of several meters can be overcome vertically.
- vertical and horizontal refer only to the figure; the person skilled in the art will recognize that the actual implementation takes place as needed.
- Fig. 4 shows in a schematic execution diagram a method for fault-tolerant control of a plurality of execution units AE, comprising providing 100 an instruction unit BE, wherein the plurality of execution units AE is segmented 101 into a plurality of serial sub-chains, each sub-chain having at least one execution unit AE along a first data line, and each sub-chain is preceded 102 by a line driver unit LTE, and the line driver units LTE are communicatively coupled to one another in series by means of a second data line 103, and the first series-connected line driver unit LTE is communicatively coupled 104 to the instruction unit BE by means of the second data line, signals on the second data line being modulated with an amplitude 10 times greater than signals on the first data line.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Rehabilitation Therapy (AREA)
- Veterinary Medicine (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Epidemiology (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Dermatology (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Hardware Redundancy (AREA)
- Small-Scale Networks (AREA)
- Safety Devices In Control Systems (AREA)
- Dc Digital Transmission (AREA)
- Optical Communication System (AREA)
- Circuit Arrangement For Electric Light Sources In General (AREA)
- Selective Calling Equipment (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Studio Circuits (AREA)
Description
- Die vorliegende Erfindung ist auf eine Systemanordnung zum fehlertoleranten Ansteuern einer Vielzahl von Ausführungseinheiten gerichtet. Hierbei erlaubt es die vorliegende Erfindung in vorteilhafter Weise, Ausführungseinheiten derart anzusteuern, dass unter anderem sowohl eine hohe sogenannte Common-Mode-Festigkeit erreicht wird als auch eine hohe Ausfallsicherheit selbst bei einer großen Anzahl von Ausführungseinheiten. Darüber hinaus ist die vorliegende Erfindung auf ein Verfahren gerichtet, welches dem Betreiben bzw. dem Herstellen der vorgeschlagenen Systemanordnung dient. Darüber hinaus wird ein Computerprogrammprodukt mit Steuerbefehlen vorgeschlagen, welche das Verfahren ausführen bzw. die Vorrichtung betreiben.
-
WO 2017/162 323 A1 zeigt eine effiziente Steuerungsanordnung und ein Steuerungsverfahren, wobei sequentiell angeordnete Ausführungseinheiten mittels einer Befehlseinheit angesteuert werden. -
WO 2018/103 880 A1 zeigt eine kompakte Leuchtdiodenanordnung, welche generisch einsetzbar ist, jedoch aufgrund der kompakten Bauart insbesondere für die Verwendung in einem Fahrzeug vorteilhaft ist. -
WO 2017/153 026 A1 zeigt ein Verfahren zur Helligkeitskompensation in mindestens einer Leuchtdiode. -
DE 20 2013 103146 U1 zeigt ein Gerätesystem mit mehreren Geräten zur verteilten Anordnung entlang Rettungswegen oder Verkehrswegen. -
US 2014/333 207 A1 zeigt ein Protokoll zum Austausch von Statusnachrichten in einem Beleuchtungssystem. -
US 8,492,983 B1 zeigt Verfahren und Systeme zum Ansteuern von Leuchteinheiten. -
US 2004/160199 A1 zeigt Leuchtanordnungen und insbesondere lineare Leuchtanordnung sowie deren Konfiguration. -
DE 10 2016 125 290 A1 zeigt Verfahren und eine Vorrichtung zur verketteten Steuerung und/ oder zur Programmierung mehrerer integrierter Schaltungen. -
US 2010/ 0188972 A1 zeigt ein Kommunikationssystem mit Ringtopologie. -
EP 2 663 028 A1 zeigt ein Kommunikationssystem, welches aufgrund einer Fehlerleitung eine Fehlertoleranz erhöht. -
US 2011/0309746 A1 zeigt eine Systemanordnung mit Leuchtdioden zur Verwendung in einem Automobil. -
DE 20 2016 008 325 U1 zeigt ein Kommunikationssystem mit einer Befehlseinheit und mehreren Steuereinheiten. - Gemäß herkömmlicher Verfahren ist eine Vielzahl von Möglichkeiten bekannt, Steuereinheiten, welche seriell geschaltet sind, anzusprechen. Hierbei gibt es generische Ansätze, welche jedoch in spezifischen Anwendungsszenarien nachteilig sein können oder aber auch sehr spezielle Ansätze, welche nunmehr nicht mehr in generischer Weise einsetzbar sind. Bekannt ist beispielsweise der sogenannte CAN-Bus, welcher bezüglich Kabelbäume entwickelt wurde und insbesondere eine Vernetzung von Steuergeräten umsetzen soll.
- Allgemein ist die Komplexität des CAN Protokolls deutlich größer als bei ISELED (eingetragene Marke) und damit teurer. Aber der gewichtigste Nachteil von CAN und LIN ist, dass diese auf Grund der Busarchitektur keine natürliche (automatische) Adressierungsmöglichkeit bieten. Hier muss die Adresse konfiguriert werden. Bei ISELED (Ausführungseinheiten) und auch bei der segmentierten ISELED (Leitungstreibereinheit und Ausführungseinheiten) gibt es eine physikalisch vorgegebene Reihung und daraus folgt die eine Möglichkeit automatisch Adressen zu vergeben.
- Aus dem Stand der Technik sind unterschiedliche Ausführungseinheiten bekannt, welche typischerweise als ein sogenannter Slave bzw. ein Client arbeiten und hierbei von einer übergeordneten Instanz, welche typischerweise als Master bezeichnet wird, Befehle erhalten. Die Ausführungseinheiten setzen diese Befehle sodann um. Der Stand der Technik zeigt hierzu unterschiedliche Architekturen bzw. Topologien, wie entsprechende Ausführungseinheiten mitsamt deren Steuerungseinheiten anzuordnen sind.
- Der Stand der Technik weist hierbei jedoch das Problem auf, dass je nach Anwendungsszenario unterschiedliche Anforderungen gestellt werden und insgesamt also abzuwägen ist, ob ein energieeffizientes Verfahren mit höherer Störanfälligkeit bereitzustellen ist, oder aber ein Verfahren, welches mehr Energie aufnimmt, dafür jedoch fehlerrobuster ist. Darüber hinaus sind die Abmessungen des vorgesehenen Einsatzortes einer solchen Architektur zu berücksichtigen. Manche Anordnungen eignen sich nicht für einen großflächigen Einsatz und können daher lediglich auf einzelnen Leiterplatten implementiert werden. Andere Architekturen hingegen können großflächig über mehrere Meter hinweg verbaut werden und haben folglich ganz andere Anforderungen zu erfüllen als Systemanordnungen auf einzelnen Leiterplatten.
- Der Stand der Technik thematisiert darüber hinaus das Problem der sogenannten elektromagnetischen Verträglichkeit EMV. So kann es zu Störungen kommen, welche entweder von Anfang an unterbunden werden oder aber auch im Nachhinein bereinigt werden. Darüber hinaus können Störungen dadurch auftreten, dass einzelne Komponenten aufgrund von Krafteinwirkung oder Hitzeeinwirkung ausfallen und somit Folgeausfälle mit sich führen. Dies ist insbesondere dann ein Problem, falls Einheiten in Serie geschaltet werden und eine Einheit jeweils Befehle von ihrem Vorgänger erhält. So kann es bei einem sogenannten Daisy Chaining dann zu Problemen kommen, wenn einzelne Komponenten bei einem Ausfall nicht durchgeschaltet werden. Somit wird die dahinterliegende Teilkette vom Kommunikationsfluss abgeschottet und fällt folglich aus. Ganz spezielle Anforderungen bestehen zudem bei einer Systemanordnung, welche in einem Automobil verbaut werden soll. Bei einem Automobil handelt es sich generell um ein hochpreisiges Produkt, auf das der Kunde stets angewiesen ist. Folglich wird seitens des Kunden keine hohe Fehleranfälligkeit toleriert und zudem sind anzusteuernde Komponenten oftmals sicherheitsrelevant. Hierbei spielt die Fehleranfälligkeit eine übergeordnete Rolle, da der Kunde nur in Ausnahmesituationen einen Kundendienst in Anspruch nehmen will und zudem die Funktionalität von sicherheitskritischen Einheiten gewährleistet sein muss.
- Es ist folglich eine Aufgabe der vorliegenden Erfindung, eine Systemanordnung zur Ansteuerung von Ausführungseinheiten bereitzustellen, welche im weitesten Sinne fehlertolerant ist und zudem mit geringem technischen Aufwand bereitgestellt werden kann. Bezüglich der Fehlertoleranz wird insbesondere auf die elektromagnetische Verträglichkeit sowie auf die Ausfallsicherheit abgestellt. Zudem ist es eine Aufgabe der vorliegenden Erfindung, ein Verfahren zum Bereitstellen bzw. zum Betreiben der vorgeschlagenen Systemanordnung vorzuschlagen.
- Die Aufgabe wird gelöst mit den Merkmalen der unabhängigen Ansprüche 1 und Weitere vorteilhafte Ausgestaltungen sind in den Unteransprüchen angegeben.
- Demgemäß wird eine Systemanordnung zum fehlertoleranten Ansteuern einer Vielzahl von Ausführungseinheiten der Systemanordnung vorgeschlagen, aufweisend eine Befehlseinheit, wobei die Vielzahl von Ausführungseinheiten in eine Mehrzahl von jeweils seriellen Teilketten, wobei jede Teilkette mindestens eine Ausführungseinheit entlang einer ersten Datenleitung aufweist, segmentiert ist und jeweils jeder Teilkette eine Leitungstreibereinheit vorgeschaltet ist und die Leitungstreibereinheiten mittels einer zweiten Datenleitung untereinander seriell kommunikativ gekoppelt sind und die erste in Serie geschaltete Leitungstreibereinheit mittels der zweiten Datenleitung mit der Befehlseinheit kommunikativ gekoppelt ist, wobei die Systemanordnung eingerichtet ist Signale auf der zweiten Datenleitung mit einer 10-fach größeren Amplitude zu modulieren als Signale auf der ersten Datenleitung.
- Die vorgeschlagene Erfindung schafft unter anderem den Vorteil, dass zur Erhöhung der systemweiten Fehlertoleranz die vorgeschlagene Segmentierung weiterhin eine automatische Adressvergabe ermöglicht. Diesen Vorteil schafft weder CAN noch LIN. Erfindungsgemäß ergibt die Vielzahl von Ausführungseinheiten, welcher segmentweise nur jeweils eine Leitungstreibereinheit vorgeschaltet ist, ein positives Verhältnis zwischen der Anzahl von Ausführungseinheiten zu der Anzahl der Leitungstreibereinheiten. Dies ermöglicht eine automatische Adressierbarkeit, im Gegensatz zu CAN/LIN, bei maximaler Fehlertoleranz und minimaler Komplexität aufgrund des einfachen Protokolls. Die serielle Anordnung ermöglicht automatische Adressierbarkeit bzw. Adressvergabe, so dass die Ausführungseinheiten jeweils mittels einer eigenen Adresse ansprechbar sind.
- Die Befehlseinheit sendet als Master Kommandos. Ein Kommando beinhaltet beispielsweise einen Befehl, also was zu tun ist z.B.: "setze Pulsweitenmodulation PWM roter Kanal"), und optional einen Parameter (z.B. = 255) und vorzugsweise eine Adresse. Diese Adresse adressiert eine oder mehrere Ausführungseinheiten. Die Ausführungseinheiten besitzen eine eindeutige Adresse, welche sich aus ihrer physischen Lage automatisch ableitet.
- Somit besteht die Möglichkeit einen Verfahrensschritt vorzusehen, der ein automatisches Zuweisen jeweils einer Adresse an jede der Ausführungseinheiten in Abhängigkeit der physischen Anordnung der jeweiligen Ausführungseinheiten innerhalb der vorgeschlagenen Systemanordnung, bewerkstelligt. Die physische Anordnung kann hierbei berücksichtigen in welcher Teilkette die jeweilige Ausführungseinheit angeordnet ist. Dies kann berücksichtigen, welche Leitungstreibereinheit der jeweiligen Ausführungseinheit vorgeschaltet ist.
- Die Kommandos werden typischerweise durch alle Leitungstreibereinheiten an alle Ausführungseinheiten verteilt. Es kann eine Filterung oder Bearbeitung in den Leitungstreibereinheiten somit entfallen. Die Ausführungseinheiten entscheiden dann gemäß ihrer eigenen Adresse und der im Kommando enthaltenen Adresse ob sie den Befehl ausführen oder nicht. Typischerweise führen sie jeweils den Befehl aus, falls sie selbst mittels der Adresse angesprochen werden.
- Hierbei erlaubt es die vorliegende Erfindung in vorteilhafter Weise, Ausführungseinheiten derart anzusteuern, dass sowohl eine hohe sogenannte Common-Mode-Festigkeit erreicht wird als auch eine hohe Ausfallsicherheit selbst bei einer großen Anzahl von Ausführungseinheiten. Es ergibt sich auch die Möglichkeit Leitungstreiber einzusetzen, die z.B für optische oder differentiell elektrische physikalische Medien optimal sind. Es wird durch die Segmentierung eine geringe Anzahl von Leitungstreibereinheiten benötigt, im Vergleich zur Gesamtzahl der Ausführungseinheiten, so dass hier mit mehr Strom/Leistungsverbrauch und höherer Komplexität des Chips gearbeitet werden kann, als bei den Ausführungseinheiten.
- Vorgeschlagen wird somit eine Alternative zu Bus-Lösungen wie CAN/LIN, welche unter anderem das beschriebene Problem der fehlenden automatischen Adressierung löst. Die Segmentierung mit Hilfe von Leitungstreibereinheiten, die Möglichkeit des passiven Durchschaltens und die Optimierung des Physical Layer (Common Mode und elektrisch differentiell oder optisch) lösen nun das Problem der Störanfälligkeit.
- Die vorgeschlagene Systemanordnung ist u. a. fehlertolerant, da die Ausführungseinheiten segmentiert werden und folglich in Teilketten angeordnet werden. Somit entstehen also serielle Teilketten, wobei die einzelnen Ausführungseinheiten hintereinandergeschaltet werden. Somit kommt es bei einem Ausfall einer Ausführungseinheit lediglich zu Beeinträchtigungen innerhalb derjenigen Teilkette, in der die ausfallende Ausführungseinheit angeordnet ist. Dies bietet gegenüber dem Stand der Technik den Vorteil, dass nicht eine Vielzahl von weiterer in Serie geschalteter Ausführungseinheiten ausfällt, sondern lediglich fallen Ausführungseinheiten in dem gleichen Segment aus. Dem kann auch dadurch beigekommen werden, dass im Fall eines Ausfallens die Ausführungseinheiten lediglich durchgeschaltet werden.
- Die Ausführungseinheiten sind seriell gekoppelt, was vorzugsweise bidirektional erfolgt. So ist es möglich, dass die Ausführungseinheiten von der Leitungstreibereinheit Befehle übermittelt bekommen und diese sodann umsetzen. Ein Befehl kann eine Anweisung sein oder aber auch ein Auslesen oder ein Setzen eines Parameters. So können die Ausführungseinheiten als Leuchtdiodeneinheiten vorgesehen sein, welche einzelne Leuchtdioden ansteuern. Leuchtdioden liegen typischerweise als rote, grüne und blaue Leuchtdioden vor, wobei auch eine weiße Leuchtdiode vorzusehen sein kann. Die Ausführungseinheiten setzten folglich die Befehle der Leitungstreibereinheit um und sind zudem in der Lage, einen Rückwert bereitzustellen. So ist es möglich, dass die Leitungstreibereinheit die Ausführungseinheit anweist, einen Sensor auszulesen, und mittels der bidirektionalen Kommunikation kann die Ausführungseinheit einen ausgelesenen Temperaturwert des Sensors zurückgeben.
- Da erfindungsgemäß mehrere Teilketten bzw. Segmente vorliegen, beeinträchtigt also ein Fehler nicht, wie es der Stand der Technik zeigt die gesamte Teilkette, und erfindungsgemäß auch nicht alle Teilketten, sondern nur eine (die betroffene) Teilkette, sondern vielmehr wird die Ausfallsicherheit dadurch erhöht, dass separate und einzeln anzusteuernde Teilketten gebildet werden. In einer nicht abschließenden Aufzählung enthalten die Teilketten mindestens eine Ausführungseinheit, wobei jeder Teilkette eine Leitungstreibereinheit vorgeschaltet ist. Auch wird die Fehlertoleranz dadurch gewährleistet, dass die Leitungstreibereinheiten im Fall eines inaktiven Zustands Signale durchleiten. Ein Durchleiten beschreibt generell das Weiterreichen von Signalen, ohne diese zu verarbeiten. Folglich wird innerhalb des ausgefallenen Elements keinerlei Logik umgesetzt bzw. Verarbeitungsschritte durchgeführt. Vielmehr wird ein Signal, welches an einem Eingang vorliegt, ohne jegliche Verarbeitung an dem Ausgang wieder ausgegeben.
- Die elektromagnetische Verträglichkeit bei dem Ansteuern einer Vielzahl von Ausführungseinheiten kann u. a. dadurch herbeigeführt werden, dass stets eine differenzielle Modulation vorgesehen wird, das heißt die Leitung wird auch aktiv getrieben wenn kein Kommando übertragen wird. Hierdurch wird auf eine steile Flanke, die beim An- und Abschalten des Leitungstreibers entsteht verzichtet. Erfindungsgemäß ist es möglich, die vorgeschlagene Topologie derart umzusetzen, dass mindestens zwischen den Leitungstreibereinheiten eine Kabelverbindung (optisch oder elektrisch differentiell) hergestellt wird. Folglich wird also die Datenleitung nicht wie herkömmlich auf einer Leiterplatte implementiert, sondern lediglich werden die einzelnen Teilketten auf einer Leiterplatte angeordnet, und die resultierenden Leiterplatten können mittels einer Kabelverbindung (optisch oder elektrisch differentiell) über die jeweilige Leitungstreibereinheit kommunikativ gekoppelt werden. Somit ist es besonders vorteilhaft, dass die Anzahl der Teilketten deshalb skaliert, da eine beliebige Anzahl von Leitungstreibereinheiten in Serie geschaltet werden kann und an jeder Leitungstreibereinheit eine Teilkette von Ausführungseinheiten kommunikativ angeordnet bzw. gekoppelt ist.
- Generell ist die Anzahl der zu betreibenden Ausführungseinheiten bzw. der Leitungstreibereinheiten durch den Adressraum beschränkt, also diejenige Anzahl an Einheiten, welche angesprochen werden kann. Da der Adressraum beliebig gewählt werden kann, skaliert also auch die Anzahl der zu verbauenden Einheiten.
- Die vorgeschlagene Systemanordnung sieht u. a. auch eine Befehlseinheit vor, welche letztendlich die einzelnen Ausführungseinheiten steuert. Dies erfolgt typischerweise nicht direkt, sondern über die Leitungstreibereinheiten. So generiert die Befehlseinheit Befehle und übermittelt diese über die jeweiligen Leitungstreibereinheiten an die Ausführungseinheiten bzw. empfängt Parameter und Werte über die Leitungstreibereinheiten von den Ausführungseinheiten. Somit stellt die Befehlseinheit bezüglich der Leitungstreibereinheiten eine übergeordnete Instanz dar und kann folglich als Master-Einheit bezeichnet werden. In diesem Falle verhalten sich die Leitungstreibereinheiten als Slave-Einheiten bzw. Client-Einheiten. Da die Leitungstreibereinheiten den Teilketten, also den Ausführungseinheiten, vorgeschaltet sind und die Leitungstreibereinheiten den jeweiligen Teilketten die Befehle übermitteln, verhalten sich die Leitungstreibereinheiten in diesem Aspekt wie Master-Einheiten gegenüber den Ausführungseinheiten. Die Ausführungseinheiten übernehmen sodann die Rolle der Slave-Einheit bzw. Client-Einheit.
- Beispielsweise liegt die vorgeschlagene Systemanordnung als eine Leuchtdiodenkette vor. Hierzu gibt die Befehlseinheit ein bestimmtes Muster aus, welches mittels der einzelnen Leuchtdioden umgesetzt werden soll. Hierzu steuert die Befehlseinheit die einzelnen Leitungstreibereinheiten an, welche sodann den Befehl an die jeweilige Teilkette weiterreichen. Die Leitungstreibereinheiten können nicht nur den Befehl weiterreichen, sondern den Befehl auch eigenständig adaptieren. Die einzelnen Ausführungseinheiten setzen den Befehl letztendlich um und steuern beispielsweise einzelne Leuchtdioden an. Hierbei kann es sich wiederum um die Leuchtdioden Rot, Grün und Blau handeln, wobei auch optional eine weiße Leuchtdiode vorgesehen sein kann. Die Ausführungseinheiten können auch als andere Aktoren wie Motoren, MatrixLEDs, Sensoren, Temperatursensoren, Lichtsensoren oder Taster vorliegen.
- Bei der ersten Datenleitung handelt es sich um diejenige Datenleitung, welche Teilketten ausbilden. So verbindet die erste Datenleitung die einzelnen Ausführungseinheiten und schließt diese Kette von Ausführungseinheiten an genau eine Leitungstreibereinheit an. Somit umfasst die Datenleitung zuerst eine Leitungstreibereinheit, woran eine Ausführungseinheit angeschlossen ist. Optional sind an diese Ausführungseinheit weitere Ausführungseinheiten seriell angeschlossen. Bei der Anzahl der Ausführungseinheiten besteht wiederum keinerlei Einschränkung, sondern lediglich wird der zugrundeliegende Adressraum entsprechend gewählt. Hierbei muss der Adressraum nicht völlig ausgeschöpft werden, sondern vielmehr stellt der Adressraum lediglich eine obere Grenze für die Anzahl der zu verbauenden Ausführungseinheiten dar.
- Die zweite Datenleitung verbindet die Leitungstreibereinheiten untereinander seriell und vorzugsweise bidirektional. Als erste Einheit ist die Befehlseinheit an die zweite Datenleitung angeschlossen, und sodann folgt mindestens eine Leitungstreibereinheit.
- Da die einzelnen Teilketten über eine eigene Datenleitung verfügen, kann bei der ersten Datenleitung von einer Datenleitung gemäß eines ersten Typs gesprochen werden. Generell liegen so viele erste Datenleitungen vor, wie es Teilketten gibt. Liegen beispielsweise drei Teilketten vor, so werden genau drei Leitungstreibereinheiten verbaut und es werden drei Teilketten gebildet, wobei innerhalb jeder Teilkette eine Datenleitung vom ersten Typ vorliegt. Folglich gibt es also in diesem Fall genau drei erste Datenleitungen. Die Unterscheidung zwischen erster und zweiter Datenleitung ermöglicht es, dass die jeweils ersten Datenleitungen anders ausgestaltet werden als die zweite Datenleitung, welche lediglich typischerweise einmal vorliegt. So kann die erste Datenleitung jeweils auf einer Leiterplatte angeordnet werden und die zweite Datenleitung kann beispielsweise als ein Kabel vorliegen. Somit ergibt sich in besonders vorteilhafter Weise ein flexibler Aufbau, der insbesondere auf das Anwendungsszenario im Automobil abstellt.
- Gemäß einem Aspekt der vorliegenden Erfindung agiert die einer Teilkette vorgeschaltete Leitungstreibereinheit für die mindestens eine Ausführungseinheit dieser Teilkette als Master-Einheit, und die mindestens eine Ausführungseinheit agiert bezüglich dieser Leitungstreibereinheit als Slave-Einheit. Dies hat den Vorteil, dass die Ausführungseinheiten Befehle von der Leitungstreibereinheit erhalten können und die Befehle sodann durch die Ausführungseinheiten hindurchgeleitet werden bzw. ausgeführt werden. So stellt die Leitungstreibereinheit einen Befehl bereit, der durch die Teilkette geleitet wird und von jeder Ausführungseinheit ausgeführt und weitergereicht wird. Darüber hinaus ist es auch möglich, mittels einer Adresse eine einzelne Ausführungseinheit anzusprechen, so dass der entsprechende Befehl von der Leitungstreibereinheit an diese eine spezielle Ausführungseinheit durch die Kette hindurch adressiert wird. Wurde der Befehl ausgeführt, so ist es auch möglich, ein Ergebnis von der jeweiligen Ausführungseinheit an die vorausgehende Ausführungseinheit zurück zu übermitteln und sodann das Endergebnis an die Leitungstreibereinheit bereitzustellen. Für diesen Fall ist eine bidirektionale Kommunikation innerhalb der Teilkette vorteilhaft. Der Befehl wird vorteilhafterweise von der Befehlseinheit ausgegebenen und über die Leitungstreibereinheiten jeweils an die Ausführungseinheiten typischerweise unverändert weitergegeben.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung agiert die Befehlseinheit für die Leitungstreibereinheiten als Master-Einheit, und die Leitungstreibereinheiten bezüglich der Befehlseinheit als Slave-Einheit. Dies hat den Vorteil, dass ein einzelner Befehl bzw. eine Folge von Befehlen von der Befehlseinheit erstellt und an die Leitungstreibereinheiten übermittelt werden kann. Die Leitungstreibereinheiten empfangen somit diesen Befehl bzw. diese Befehle und leiten diese ggf. unverändert oder angepasst an die Ausführungseinheiten. Auch hier ist es möglich, dass die Leitungstreibereinheiten mittels einer Adresse einzeln angesprochen werden und ggf. auch Rückwerte an die Befehlseinheit ausgeben.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung sind die erste Datenleitung und/oder die zweite Datenleitung bidirektional ausgestaltet. Dies hat den Vorteil, dass Befehle bzw. Signale in beide Richtungen übermittelt werden, und folglich auch sowohl die Ausführungseinheiten Rückgabewerte an die Leitungstreibereinheiten übersenden können, als auch die Leitungstreibereinheiten Signale an die Befehlseinheit übersenden können. Insbesondere können die einzelnen Einheiten untereinander kommunizieren. Vorzugsweise werden beide Datenleitungen bidirektional ausgestaltet, wobei es auch möglich ist, dass nur die erste Datenleitung bidirektional ist oder die zweite Datenleitung. Da mehrere Datenleitungen vom ersten Typ vorliegen, ist es auch möglich, dass die einzelnen ersten Datenleitungen unterschiedlich ausgestaltet werden. Typischerweise werden jedoch alle ersten Datenleitungen gleich ausgestaltet.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung werden Signale auf der zweiten Datenleitung mit einer größeren Amplitude moduliert als Signale auf der ersten Datenleitung. Dies hat den Vorteil, dass mittels der zweiten Datenleitung größere Strecken fehlerfrei überwunden werden können. Eine höhere Amplitude stellt daraufhin ab, dass die Unterscheidung zwischen Null und Eins deutlicher ist, die Signalmodulierung also weniger fehleranfällig ist. So ist es möglich, die erste Datenleitung auf einer Leiterplatte zu implementieren und die zweite Datenleitung mittels einer Kabelleitung zu implementieren, die sodann auch aufgrund der größeren Entfernung entsprechend mit einer größeren Amplitude moduliert wird.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung werden Signale auf der zweiten Datenleitung mit einer 10-fach größeren Amplitude moduliert als Signale auf der ersten Datenleitung. Dies hat den Vorteil, dass überraschenderweise dieser Wert besonders vorteilhaft ist und die Signale auf der ersten Datenleitung besonders effizient moduliert werden können und die Signale auf der zweiten Datenleitung zwar weniger effizient moduliert werden, dafür aber deutlich fehlerrobuster. Überraschenderweise wurde erfindungsgemäß erkannt, dass sich genau der vorgeschlagene Wert besonders gut eignet, um das Verhältnis der Amplitude der zweiten Datenleitung zur ersten Datenleitung festzulegen.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung ist die erste Datenleitung und/oder die zweite Datenleitung eine optische oder eine elektrische Datenleitung. Dies hat den Vorteil, dass mehrere Optionen angeboten werden können, welche wiederum in Abhängigkeit des Anwendungsszenarios ausgewählt werden können. Erfindungsgemäß wird vorzugsweise eine elektrische Datenleitung implementiert.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung ist die erste Datenleitung und/oder die zweite Datenleitung eine elektrische Datenleitung, welche stets Strom führt. Dies hat den Vorteil, dass immer differenziell gesendet werden kann, und folglich gibt es auch keine Nachteile einer besonders steilen Flanke, während der Strom angelegt wird. Vielmehr liegt stets ein Strom vor und das Einschwingen wird verhindert. Somit ist das vorgeschlagene Verfahren auch bezüglich einer elektromagnetischen Störung unempfindlich. Darüber hinaus ist es vorteilhaft, eine solche Ausgestaltung zu wählen, da eine Kabelverbindung implementiert werden kann, welche größere Entfernungen von mehreren Metern überwinden muss.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung ist jeweils eine Leitungstreibereinheit mitsamt einer Teilkette auf einer eigenen Leiterplatte angeordnet. Dies bietet den Vorteil, dass die Leitungstreibereinheiten mitsamt den Ausführungseinheiten und der jeweils ersten Datenleitung für kurze Entfernungen optimiert werden können und folglich eben auch auf einer einzelnen Leiterplatte angeordnet werden können. Somit wird auch die Fehleranfälligkeit reduziert, da die Ausführungseinheiten segmentiert werden, und mittels Leiterplatten werden einzelne Teilketten gesondert angesprochen.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung sind die Leitungstreibereinheiten jeweils derart ausgestaltet, dass Signale auf der zweiten Datenleitung bei einem inaktiven Zustand der jeweiligen Leitungstreibereinheit durch diese Leitungstreibereinheit durchgeleitet werden. Dies bietet den Vorteil, dass bei einem Ausfallen einer Leitungstreibereinheit die weiteren in Serie geschalteten Leitungstreibereinheiten trotzdem Befehle empfangen und auch Signale zurücksenden können. Somit wird die defekte Leitungstreibereinheit lediglich ausgeblendet und entsprechende Signale werden passiv hindurchgeleitet. Folglich erfolgt kein Verarbeiten von Signalen in der defekten Leitungstreibereinheit, wobei diese Leitungstreibereinheit allerdings auch nicht die weitere Kette unterbricht. Somit ist es vorteilhaft, dass bei einer defekten Leitungstreibereinheit lediglich eine Teilkette von mehreren Teilketten ausfällt.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung sind die Ausführungseinheiten jeweils als Leuchtdiode, Motor, Sensor, Temperatursensor, Lichtsensor, Taster oder Schalter ausgestaltet. Dies hat den Vorteil, dass unterschiedliche Ausführungseinheiten vorgesehen werden können, wobei erfindungsgemäß besonders eine Leuchtdiode bevorzugt ist. Die Leuchtdiode kann wiederum einzelne Einheiten aufweisen, die Rot, Grün oder Blau ausstrahlen. Generell ist es jedoch auch möglich, die einzelnen Ausführungseinheiten zu mischen, derart, dass beispielsweise Leuchtdioden vorliegen und innerhalb der gleichen Kette auch Sensoren. Außerdem kann eine Teilkette aus Leuchtdioden gebildet werden und eine andere Teilkette aus Sensoren. Bevorzugt sind jedoch alle Ausführungseinheiten gleich ausgestaltet.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung sind die Ausführungseinheiten eingerichtet, mindestens eine Statusinformation an die Leitungstreibereinheit bereitzustellen. Dies hat den Vorteil, dass die Leitungstreibereinheit anweisen kann, dass ein bestimmter Wert ausgelesen wird, und sodann wird dieser Befehl durch die Teilkette zu der angesprochenen Ausführungseinheit hindurchgeleitet und dieses Ausführungseinheit liefert den angeforderten Wert wieder über die anderen Ausführungseinheiten zurück. Hierbei ist eine bidirektionale Kommunikation besonders vorteilhaft. Die Aufgabe wird auch gelöst durch ein Verfahren zum fehlertoleranten Ansteuern einer Vielzahl von Ausführungseinheiten, aufweisend ein Bereitstellen einer Befehlseinheit, wobei die Vielzahl von Ausführungseinheiten in eine Mehrzahl von jeweils seriellen Teilketten, wobei jede Teilkette mindestens eine Ausführungseinheit entlang einer ersten Datenleitung aufweist, segmentiert wird und jeweils jeder Teilkette eine Leitungstreibereinheit vorgeschaltet wird und die Leitungstreibereinheiten mittels einer zweiten Datenleitung untereinander seriell kommunikativ gekoppelt werden und die erste in Serie geschaltete Leitungstreibereinheit mittels der zweiten Datenleitung mit der Befehlseinheit kommunikativ gekoppelt wird, wobei Signale auf der zweiten Datenleitung mit einer 10-fach größeren Amplitude moduliert werden als Signale auf der ersten Datenleitung.
- Erfindungsgemäß ist es besonders vorteilhaft, dass die Systemanordnung strukturelle Merkmale bereitstellt, welche funktional den Verfahrensschritten entsprechen. Ferner werden Verfahrensschritte vorgeschlagen, welche strukturell auch von der Systemanordnung bezüglich der entsprechenden Funktionalität nachgebildet werden können. So dient das Verfahren dem Betreiben der Systemanordnung und die Systemanordnung kann das vorgeschlagene Verfahren ausführen.
- Weitere vorteilhafte Ausgestaltungen werden anhand der beigefügten Figuren näher erläutert. Es zeigen:
- Fig. 1:
- eine Teilkette, aufweisend einen Mikrocontroller und mehrere in Serie geschaltete Leuchtdiodeneinheiten gemäß dem Stand der Technik;
- Fig. 2A, 2B:
- eine Modulation von Daten als Anwendungsbeispiel der vorliegenden Erfindung;
- Fig. 3:
- die vorgeschlagene Systemanordnung in einem Blockschaltbild bezüglich eines Aspekts der vorliegenden Erfindung; und
- Fig. 4:
- ein Ablaufdiagramm gemäß dem vorgeschlagenen Verfahren zum fehlertoleranten Ansteuern einer Vielzahl von Ausführungseinheiten gemäß einem Aspekt der vorliegenden Erfindung.
-
Fig. 1 zeigt auf der linken Seite einen Mikrocontroller, welcher beispielsweise als Befehlseinheit agiert. Darüber hinaus sind mittels einer bidirektionalen Kommunikation mehrere Ausführungseinheiten angeordnet, welche vorliegend als LED-Controller implementiert sind. Dies wird durch das Bezugszeichen MLED CTRL gezeigt. Der Stand der Technik weist bezüglich mancher Anwendungsszenarien den Nachteil auf, dass mit dem Ausfall eines Controllers alle weiteren in Serie geschalteten Controller ebenfalls ausfallen, da die Kommunikation unterbunden ist. -
Fig. 1 zeigt eine mögliche Ausgestaltung eines Systems bzw. der Kommunikationsanordnung gemäß Stand der Technik. So ist vorliegend auf der linken Seite die Befehlseinheit ersichtlich, welche an drei Steuereinheiten angeschlossen ist. Da die drei Steuereinheiten in Serie geschaltet sind, ist die Befehlseinheit mit einer Steuereinheit direkt verbunden und den weiteren Steuereinheiten indirekt verbunden. Bei den Steuereinheiten kann es sich um sogenannte Multi-LED-Controller handeln. Dies ist in der vorliegendenFig. 1 als MLED CTRL eingezeichnet. Durch das einheitliche Bezugszeichen soll insbesondere verdeutlicht werden, dass die Steuereinheiten typischerweise gleich ausgestaltet sind. Wie vorliegend ersichtlich ist, handelt es sich bei den Leuchtdioden um RGB- (also rot, grün, blau) Leuchtdioden. Diese sind hierbei eingerichtet, einen bestimmten Farbwert mittels eines Mischverhältnisses der einzelnen Leuchtdiodeneinheiten einzustellen. Ferner ist in der vorliegenden Figur ersichtlich, dass weitere Komponenten je nach Bedarf vorzusehen sind. Beispielsweise kann es notwendig sein, eine Stromzufuhr bereitzustellen. Hierbei ist es jedoch auch möglich, diese Komponenten, beispielsweise die Stromzufuhr, extern bereitzustellen und lediglich anzuschließen. - Die Datenleitung ist vorliegend als Mehrzahl von Datenleitungssegmenten vorhanden, welche als bidirektionale Pfeile SIO1, SIO2 eingezeichnet sind. Steuereinheiten können auch als Ausführungseinheiten bezeichnet werden. Der MLED Controller kann auch als ISELED Controller bezeichnet werden, wie er erfindungsgemäß als Ausführungseinheit eingesetzt werden kann.
-
Fig. 2A zeigt eine Modulation von Daten, wobei nur in der aktiven Phase wenn Kommandos übertragen werden die Datenleitungen differentiell moduliert sind. In der inaktiven Phase, wenn also keine Kommandos übertragen werden wird der Strom auf beiden Leitungen abgeschaltet und beide Leitungen "fallen" auf ein nicht differentielles Potential, welches typischerweise durch eine Terminierung vergebenen wird. Beim Übergang von aktiver Phase (differentiell mit hohem Stromverbrauch) zu inaktiver Phase (nicht differenziell, kein Stromverbrauch) kommt es zu einer steilen Flanke. Zudem ist mittels der vertikalen Linien eine Taktung angedeutet, die dazu dient, aus dem Signal eine Semantik auszulesen. Vorzugsweise wird innerhalb der Taktung dann das Signal ausgelesen, falls die Amplitude maximal ausgeschöpft ist, um eine Fehlerrobustheit zu erreichen. Bei den gezeigten Daten kann es sich um Synchronisierungsdaten auf der linken Seite handeln und um ein Kommando auf der rechten Seite. - Generell sind die Dimensionen und Inhalte der
Fig. 2A und2B lediglich beispielhaft und schematisch zu verstehen. So können auch andere Modifikationen vorliegen. -
Fig. 2A zeigt einen Nachteil im Stand der Technik, nämlich die steile Flanke auf der linken Seite, welche nicht elektromagnetisch verträglich ist. Somit ist eine solche Modulierung für eine Kabelverbindung wenig tauglich. Für eine Leiterplatte ist diese Modulierung geeignet, weshalb lediglich auf der ersten Datenleitung erfindungsgemäß derart gesendet werden kann. Dies ist deshalb der Fall, da hier eine kurze Verbindung vorherrscht und ein Abschirmen möglich ist. -
Fig. 2B zeigt ein überlagertes Signal und zeigt folglich zwei Kennlinien. Im Gegensatz zuFigur 2A wird die Datenleitung immer aktiv getrieben. Die Übermittlung des Kommandos erfolgt mit einer Sequenz von Bits, welche differentiell moduliert sind wie beiFigur 2A . Im Gegensatz zuFigur 2A werden die Datenleitungen nach der Übertragung des Kommandos nicht abgeschaltet und senden weiterhin ein differentielles Idle Pattern. Hierbei handelt es sich um einen Aspekt der Datenmodulierung, der auch erfindungsgemäß Einsatz finden kann. Besonders vorteilhaft ist es, dass erfindungsgemäß ohne Anpassung des Senders empfängerseitig nicht nur ein Abtasten an solchen unvorteilhaften Zeitpunkten, also wenn eine Signalstärke nahe dem Schwellwert ist, vermieden wird, sondern ein Abtasten bei eben maximaler Amplitude erfolgt. Dies garantiert einen ausreichenden Abstand der Signalstärke vom Schwellwert zu einem Messzeitpunkt, also dem Abtastzeitpunkt. Der Abtastzeitpunkt ist zeitlich innerhalb einer Bitbreite angeordnet, welche bestimmt innerhalb welcher Zeitspanne das jeweilige zu übertragende Bit kodiert ist. Somit ist also der Abtastzeitpunkt jeweils innerhalb dieser Bitbreite zu wählen und liest jeweils eine Bitbelegung aus. Die einzelnen Bitbreiten, welche den seriellen Bitdatenstrom in einzelne Bits unterteilen sind typischerweise zeitlich äquidistant. Ein Idle Pattern wird auch als Leerlaufmuster bezeichnet. - Bei typischerweise durchgeführten Abtastungen kann es sich um Abtastzeitpunkte zur zeitlichen Mitte einer Bitbreite handeln. So steigt die Signalstärke beispielsweise bei einem Wechsel von einer kodierten Null zu einer kodierten Eins gegen Anfang der Bitbreite, erreicht in etwa in der Mitte der Bitbreite ihr Maximum und fällt danach ab, falls anschließend eine Null kodiert werden soll. Somit kann als ein Referenzpunkt eines geeigneten Abtastzeitpunkts die Mitte einer Bitbreite gewählt werden.
-
Fig. 3 zeigt den vorgeschlagenen Aufbau einer Systemanordnung, wobei die Befehlseinheit BE als ein Mikrocontroller vorliegt. Diese Befehlseinheit BE ist mit einer Mehrzahl von Leitungstreibereinheiten LTE kommunikativ gekoppelt. Die Befehlseinheit BE ist mittels der zweiten Datenleitung mit den seriell geschalteten Leitungstreibereinheiten LTE verbunden. Hierzu verfügt jede Leitungstreibereinheit LTE über drei Schnittstellen, nämlich Schnittstellen A, B und C. Wie vorliegend eingezeichnet ist, kommuniziert eine Leitungstreibereinheit LTE mit einer Teilkette von Ausführungseinheiten AE. Diese Ausführungseinheiten AE sind ebenfalls in Serie geschaltet und kommunizieren mittels der ersten Datenleitung. - Wie ebenfalls gezeigt ist, liegen mehrere Teilketten vor, wobei jede Teilkette eine Leitungstreibereinheit LTE umfasst und mindestens eine Ausführungseinheit AE. Somit liegen auch mehrere Datenleitungen ersten Typs vor, wobei lediglich drei Teilketten, also drei erste Datenleitungen, eingezeichnet sind.
- Das vorgeschlagene System skaliert, was dadurch gekennzeichnet ist, dass zwischen der zweiten Teilkette und der dritten Teilkette Punkte eingezeichnet sind. Diese Punkte verdeutlichen, dass hierbei mehrere Teilketten in unbestimmter Anzahl vorliegen können. Die Anzahl wird lediglich durch den Adressraum beschränkt. Rechts unten in der vorliegenden
Fig. 3 ist gezeigt, dass unterschiedlich viele Ausführungseinheiten AE vorzusehen sein können, was ebenfalls durch Punkte angedeutet ist. Auch hier ist der Adressraum ausschlaggebend für die Anzahl der Ausführungseinheiten AE. - In der vorliegenden
Fig. 3 ist die jeweils erste Datenleitung horizontal eingezeichnet und die zweite Datenleitung vertikal. Die zweite Datenleitung bezieht sich ebenfalls auf die Verbindung zwischen Befehlseinheit BE und der mehreren Leitungstreibereinheiten LTE. Insgesamt können die horizontalen Teilketten auf einer Leiterplatte jeweils angeordnet werden, während zwischen der vertikalen Verbindung eine Kabelverbindung implementiert werden kann. Somit können vertikal auch größere Distanzen von mehreren Metern überwunden werden. Vertikal und horizontal bezieht sich vorliegend lediglich auf die Figur, wobei der Fachmann erkennt, dass die tatsächliche Implementierung je nach Bedarf erfolgt. -
Fig. 4 zeigt in einem schematischen Ausführungsdiagramm ein Verfahren zum fehlertoleranten Ansteuern einer Vielzahl von Ausführungseinheiten AE, aufweisend ein Bereitstellen 100 einer Befehlseinheit BE, wobei die Vielzahl von Ausführungseinheiten AE in eine Mehrzahl von jeweils seriellen Teilketten, wobei jede Teilkette mindestens eine Ausführungseinheit AE entlang einer ersten Datenleitung aufweist, segmentiert wird 101 und jeweils jeder Teilkette einer Leitungstreibereinheit LTE vorgeschaltet wird 102 und die Leitungstreibereinheiten LTE mittels einer zweiten Datenleitung untereinander seriell kommunikativ gekoppelt werden 103 und die erste in Serie geschaltete Leitungstreibereinheit LTE mittels der zweiten Datenleitung mit der Befehlseinheit BE kommunikativ gekoppelt wird 104, wobei Signale auf der zweiten Datenleitung mit einer 10-fach größeren Amplitude moduliert werden als Signale auf der ersten Datenleitung.
Claims (11)
- Systemanordnung zum fehlertoleranten Ansteuern einer Vielzahl von Ausführungseinheiten (AE) der Systemanordnung, aufweisend:- eine Befehlseinheit (BE) und Leitungstreibereinheiten (LTE), wobei- die Vielzahl von Ausführungseinheiten (AE) in eine Mehrzahl von jeweils seriellen Teilketten, wobei jede Teilkette mindestens eine Ausführungseinheit (AE) entlang einer ersten Datenleitung aufweist, segmentiert ist und jeweils jeder Teilkette eine Leitungstreibereinheit (LTE) vorgeschaltet ist; und- die Leitungstreibereinheiten (LTE) mittels einer zweiten Datenleitung untereinander seriell kommunikativ gekoppelt sind und die erste in Serie geschaltete Leitungstreibereinheit (LTE) mittels der zweiten Datenleitung mit der Befehlseinheit (BE) kommunikativ gekoppelt ist, dadurch gekennzeichnet, dass die Systemanordnung eingerichtet ist Signale auf der zweiten Datenleitung mit einer 10-fach größeren Amplitude zu modulieren als Signale auf der ersten Datenleitung, wobei bei einem Ansteuern der Vielzahl der Ausführungseinheiten (AE) die Systemanordnung weiterhin dazu eingerichtet ist, stets eine differenzielle Modulation bereitzustellen, so dass die Datenleitungen aktiv gesteuert werden, auch wenn kein Befehl übertragen wird.
- Systemanordnung nach Anspruch 1, dadurch gekennzeichnet, dass
die einer Teilkette vorgeschaltete Leitungstreibereinheit (LTE) für die mindestens eine Ausführungseinheit (AE) dieser Teilkette eingerichtet ist als Master-Einheit zu agieren und die mindestens eine Ausführungseinheit (AE) bezüglich dieser Leitungstreibereinheit (LTE) eingerichtet ist als Slave-Einheit zu agieren. - Systemanordnung nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Befehlseinheit (BE) für die Leitungstreibereinheiten (LTE) eingerichtet ist als Master-Einheit zu agieren und die Leitungstreibereinheiten (LTE) bezüglich der Befehlseinheit (BE) eingerichtet sind als Slave-Einheit zu agieren.
- Systemanordnung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die erste Datenleitung und/ oder die zweite Datenleitung bidirektional ist, wobei für den Fall, dass die erste Datenleitung nicht bidirektional ist die Kommunikationsrichtung von der jeweils einen Leitungstreibereinheit (LTE) zu der mindestens einen Ausführungseinheit (AE) ist und für den Fall, dass die zweite Datenleitung nicht bidirektional ist die Kommunikationsrichtung von der Befehlseinheit (BE) zu den Leitungstreibereinheiten (LTE) ist.
- Systemanordnung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die erste Datenleitung und/ oder die zweite Datenleitung eine optische oder eine elektrische Datenleitung ist.
- Systemanordnung nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass die erste Datenleitung und/ oder die zweite Datenleitung eine elektrische Datenleitung ist, welche eingerichtet ist stets Strom zu führen.
- Systemanordnung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass jeweils eine Leitungstreibereinheit (LTE) mitsamt einer Teilkette auf einer eigenen Leiterplatte angeordnet ist.
- Systemanordnung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Leitungstreibereinheiten (LTE) jeweils derart ausgestaltet sind, dass Signale auf der zweiten Datenleitung bei einem inaktiven Zustand der jeweiligen Leitungstreibereinheit (LTE) durch diese Leitungstreibereinheit (LTE) durchgeleitet werden.
- Systemanordnung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Ausführungseinheiten (AE) jeweils als Leuchtdiode, Motor, Sensor, Temperatursensor, Lichtsensor, Taster oder Schalter ausgestaltet sind.
- Systemanordnung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Ausführungseinheiten (AE) eingerichtet sind mindestens eine Statusinformation an die Leitungstreibereinheiten (LTE) bereitzustellen, für den Fall, dass die erste Datenleitung bidirektional ist.
- Verfahren zum fehlertoleranten Ansteuern einer Vielzahl von Ausführungseinheiten (AE), aufweisend:- Bereitstellen (100) einer Befehlseinheit (BE) und Leitungstreibereinheiten,- Segmentieren (101) der Vielzahl von Ausführungseinheiten (AE) in eine Mehrzahl von jeweils seriellen Teilketten, wobei jede Teilkette mindestens eine Ausführungseinheit (AE) entlang einer ersten Datenleitung aufweist, - Vorschalten (102) jeder Teilkette eine jeweilige Leitungstreibereinheit (LTE),- seriell kommunikativ Koppeln (103) der Leitungstreibereinheiten (LTE) mittels einer zweiten Datenleitung untereinander, und- kommunikativ Koppeln (104) der ersten in Serie geschaltete Leitungstreibereinheit (LTE) mittels der zweiten Datenleitung mit der Befehlseinheit (BE), gekennzeichnet durch- Modulieren von Signalen auf der zweiten Datenleitung mit einer 10-fach größeren Amplitude als Signale auf der ersten Datenleitung,- bei einem Ansteuern der Vielzahl der Ausführungseinheiten (AE) stets eine differenzielle Modulation bereitstellen, so dass die Datenleitungen aktiv gesteuert werden, auch wenn kein Befehl übertragen wird.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018007141.4A DE102018007141C5 (de) | 2018-09-10 | 2018-09-10 | Segmentierte Steuerungsanordnung |
| EP19734249.6A EP3827563B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| PCT/EP2019/025185 WO2020052800A1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
Related Parent Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/EP2019/025185 Previously-Filed-Application WO2020052800A1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| EP19734249.6A Division EP3827563B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| EP19734249.6A Division-Into EP3827563B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4040921A1 EP4040921A1 (de) | 2022-08-10 |
| EP4040921B1 true EP4040921B1 (de) | 2025-04-02 |
Family
ID=67060358
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22164853.8A Active EP4040921B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| EP19734249.6A Active EP3827563B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| EP19734248.8A Active EP3827644B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| EP19733397.4A Active EP3827643B9 (de) | 2018-09-10 | 2019-06-17 | Segmentierte steuerungsanordnung |
| EP23180072.3A Active EP4236631B1 (de) | 2018-09-10 | 2019-06-17 | Segmentierte steuerungsanordnung |
Family Applications After (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19734249.6A Active EP3827563B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| EP19734248.8A Active EP3827644B1 (de) | 2018-09-10 | 2019-06-16 | Segmentierte steuerungsanordnung |
| EP19733397.4A Active EP3827643B9 (de) | 2018-09-10 | 2019-06-17 | Segmentierte steuerungsanordnung |
| EP23180072.3A Active EP4236631B1 (de) | 2018-09-10 | 2019-06-17 | Segmentierte steuerungsanordnung |
Country Status (9)
| Country | Link |
|---|---|
| EP (5) | EP4040921B1 (de) |
| JP (1) | JP7040841B2 (de) |
| KR (1) | KR102316677B1 (de) |
| CN (1) | CN112740835B (de) |
| DE (2) | DE102018007141C5 (de) |
| ES (5) | ES2957707T3 (de) |
| MY (1) | MY209487A (de) |
| SG (2) | SG11202102329QA (de) |
| WO (3) | WO2020052800A1 (de) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019002119B4 (de) * | 2019-03-25 | 2020-06-10 | Inova Semiconductors Gmbh | Ansteuern von Ausführungseinheiten |
| DE102019111081B3 (de) * | 2019-04-29 | 2020-08-27 | Elmos Semiconductor Aktiengesellschaft | LIN-Datenbussystem für Ultraschallanwendungen mit kompakten Überbrückungsschaltern |
| KR102265735B1 (ko) * | 2019-06-07 | 2021-06-16 | 대한민국 | 벌의 수분을 위한 꽃가루 부착장치 |
| DE202020002858U1 (de) | 2020-07-03 | 2020-10-04 | Denis Bronsert | Anordnung zur Ansteuerung von LED's |
| ES2970372T3 (es) | 2021-03-17 | 2024-05-28 | Inova Semiconductors Gmbh | Protocolo de propagación de comandos de baja latencia |
| CN114553632B (zh) * | 2022-03-01 | 2024-02-27 | 深圳市鼎芯无限科技有限公司 | 一种自编号菊花链通信方法 |
| KR102640052B1 (ko) | 2023-11-06 | 2024-02-23 | 주식회사 서연이화 | 차량용 무드램프 제어 시스템 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03143135A (ja) * | 1989-09-01 | 1991-06-18 | Bently Nevada | 遠隔センサ通信系と方法 |
| DE4106726B4 (de) * | 1991-03-02 | 2007-03-22 | Daimlerchrysler Ag | Kommunikationsnetzwerk in Kraftfahrzeugen |
| GB2318216B (en) * | 1996-10-12 | 2001-04-04 | Motorola Ltd | The stabilisation of phased array antennas |
| TW406465B (en) * | 1997-04-07 | 2000-09-21 | Cts Corp | Control circuits for generating control signals proportional to the position of an input device |
| JP2001285501A (ja) * | 2000-03-30 | 2001-10-12 | Aiphone Co Ltd | 集合住宅用テレビインターホンシステム |
| US7202613B2 (en) * | 2001-05-30 | 2007-04-10 | Color Kinetics Incorporated | Controlled lighting methods and apparatus |
| DE10306444A1 (de) * | 2003-02-17 | 2004-09-02 | Micronas Gmbh | 2-Leitungs-Bussystem |
| US7643756B2 (en) * | 2004-09-28 | 2010-01-05 | Finisar Corporation | Optical network for transferring data between devices in a vehicle |
| KR101308047B1 (ko) * | 2007-02-08 | 2013-09-12 | 삼성전자주식회사 | 메모리 시스템, 이 시스템을 위한 메모리, 및 이 메모리를위한 명령 디코딩 방법 |
| TWI487430B (zh) * | 2008-01-15 | 2015-06-01 | 皇家飛利浦電子股份有限公司 | 光源 |
| EP2253090A1 (de) * | 2008-02-08 | 2010-11-24 | Panasonic Avionics Corporation | Optisches kommunikationssystem und verfahren zum verteilen von inhalt an bord einer mobilplattform während der reise |
| US8179787B2 (en) * | 2009-01-27 | 2012-05-15 | Smsc Holding S.A.R.L. | Fault tolerant network utilizing bi-directional point-to-point communications links between nodes |
| US8296488B2 (en) * | 2009-04-27 | 2012-10-23 | Abl Ip Holding Llc | Automatic self-addressing method for wired network nodes |
| US8344659B2 (en) * | 2009-11-06 | 2013-01-01 | Neofocal Systems, Inc. | System and method for lighting power and control system |
| US8492983B1 (en) | 2010-05-11 | 2013-07-23 | Analog Technologies Corporation | System and method to address and control serially connected LEDs |
| CN103098544A (zh) * | 2010-06-18 | 2013-05-08 | B/E航空公司 | 用于交通工具照明的模块化发光二极管系统 |
| US20130108898A1 (en) * | 2011-10-26 | 2013-05-02 | Eetrex, Inc. | Modular battery control system architecture |
| NL2008017C2 (en) * | 2011-12-22 | 2013-06-26 | Eldolab Holding Bv | Method of retrieving status information of a lighting system and daisy-chained lighting system. |
| DE102012205964C5 (de) * | 2012-04-12 | 2026-01-08 | Zumtobel Lighting Gmbh | Beleuchtungssystem und Verfahren hierfür |
| US8861337B2 (en) * | 2012-05-07 | 2014-10-14 | Tesla Motors, Inc. | Robust communications in electrically noisy environments |
| EP2765713B1 (de) * | 2013-02-08 | 2016-11-30 | Elmos Semiconductor Aktiengesellschaft | Verfahren zum Bereitstellen von Strom für mindestens einen an ein Busgerät angeschlossenen Verbraucher und Vorschalteinrichtung für einen Verbraucher |
| DE102013212954A1 (de) * | 2013-07-03 | 2015-01-08 | Elmos Semiconductor Ag | Verfahren zur Adressierung der Teilnehmer eines Bussystems |
| DE202013103146U1 (de) * | 2013-07-15 | 2014-10-16 | Hanning & Kahl Gmbh & Co. Kg | Gerätesystem |
| EP3109994A4 (de) * | 2013-10-01 | 2017-08-02 | Wynnertech S.l. | Flexible digitale steuerung für leistungswandler |
| DE102014003066B4 (de) * | 2014-03-04 | 2024-01-18 | Elmos Semiconductor Se | Methode zur halbautomatischen Adressermittlung für Bus-Teilnehmer eines gemischt sternförmigen / seriellen Beleuchtungsnetzwerks für die Verwendung in Kfz |
| US9465683B2 (en) * | 2014-07-07 | 2016-10-11 | Infineon Technologies Ag | Apparatus and a method for providing an error signal for a control unit |
| DE102016123400B3 (de) * | 2016-01-19 | 2017-04-06 | Elmos Semiconductor Aktiengesellschaft | Eindrahtlichtsteuerbus mit mehreren Pegeln |
| DE102016104440B4 (de) | 2016-03-10 | 2025-10-02 | Inova Semiconductors Gmbh | Verfahren und Vorrichtung zur Helligkeitskompensation einer LED |
| DE202016008329U1 (de) | 2016-03-21 | 2017-07-28 | Inova Semiconductors Gmbh | Effiziente Steuerungsanordnung |
| DE102016105263B4 (de) * | 2016-03-21 | 2017-11-23 | Inova Semiconductors Gmbh | Verfahren und Vorrichtung zur bidirektionalen Kommunikation |
| NL2016662B1 (en) * | 2016-04-22 | 2017-11-16 | Eldolab Holding Bv | Modular lighting application. |
| WO2018046596A1 (de) * | 2016-09-09 | 2018-03-15 | Elmos Semiconductor Aktiengesellschaft | Vorrichtung zur ansteuerung elektrischer und/oder elektronischer komponenten eines kfz-moduls und ein derartiges kfz-modul |
| DE102016014649A1 (de) | 2016-12-08 | 2018-06-14 | Inova Semiconductors Gmbh | Kompakte Leuchtdioden-Anordnung |
| CN108232410B (zh) * | 2017-12-28 | 2021-06-25 | 广州亿航智能技术有限公司 | 一种无人机的天线辐射方向调节器 |
-
2018
- 2018-09-10 DE DE102018007141.4A patent/DE102018007141C5/de active Active
- 2018-09-10 DE DE202018006211.1U patent/DE202018006211U1/de active Active
-
2019
- 2019-06-16 CN CN201980059008.6A patent/CN112740835B/zh active Active
- 2019-06-16 WO PCT/EP2019/025185 patent/WO2020052800A1/de not_active Ceased
- 2019-06-16 SG SG11202102329QA patent/SG11202102329QA/en unknown
- 2019-06-16 JP JP2021512855A patent/JP7040841B2/ja active Active
- 2019-06-16 ES ES19734248T patent/ES2957707T3/es active Active
- 2019-06-16 EP EP22164853.8A patent/EP4040921B1/de active Active
- 2019-06-16 ES ES22164853T patent/ES3032496T3/es active Active
- 2019-06-16 EP EP19734249.6A patent/EP3827563B1/de active Active
- 2019-06-16 WO PCT/EP2019/025184 patent/WO2020052799A1/de not_active Ceased
- 2019-06-16 EP EP19734248.8A patent/EP3827644B1/de active Active
- 2019-06-16 MY MYPI2021001181A patent/MY209487A/en unknown
- 2019-06-16 KR KR1020217006935A patent/KR102316677B1/ko active Active
- 2019-06-16 ES ES19734249T patent/ES2925922T3/es active Active
- 2019-06-17 SG SG11202102333WA patent/SG11202102333WA/en unknown
- 2019-06-17 WO PCT/EP2019/025186 patent/WO2020052801A1/de not_active Ceased
- 2019-06-17 EP EP19733397.4A patent/EP3827643B9/de active Active
- 2019-06-17 ES ES19733397T patent/ES2955415T3/es active Active
- 2019-06-17 ES ES23180072T patent/ES3033122T3/es active Active
- 2019-06-17 EP EP23180072.3A patent/EP4236631B1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018007141B4 (de) | 2019-10-10 |
| DE102018007141C5 (de) | 2025-05-15 |
| CN112740835B (zh) | 2023-03-17 |
| EP4236631A2 (de) | 2023-08-30 |
| EP3827644A1 (de) | 2021-06-02 |
| JP2021528025A (ja) | 2021-10-14 |
| EP3827643B9 (de) | 2023-09-27 |
| EP4236631B1 (de) | 2025-04-02 |
| ES3033122T3 (en) | 2025-07-30 |
| ES3032496T3 (en) | 2025-07-21 |
| EP3827563A1 (de) | 2021-06-02 |
| DE202018006211U1 (de) | 2019-08-19 |
| EP3827644B1 (de) | 2023-08-02 |
| SG11202102329QA (en) | 2021-04-29 |
| EP4236631A3 (de) | 2023-11-01 |
| EP3827643A1 (de) | 2021-06-02 |
| ES2957707T3 (es) | 2024-01-24 |
| ES2925922T3 (es) | 2022-10-20 |
| CN112740835A (zh) | 2021-04-30 |
| SG11202102333WA (en) | 2021-04-29 |
| EP3827643B1 (de) | 2023-07-05 |
| EP4040921A1 (de) | 2022-08-10 |
| WO2020052800A1 (de) | 2020-03-19 |
| ES2955415T3 (es) | 2023-11-30 |
| MY209487A (en) | 2025-07-11 |
| WO2020052799A1 (de) | 2020-03-19 |
| KR102316677B1 (ko) | 2021-10-22 |
| EP3827563B1 (de) | 2022-07-27 |
| WO2020052801A1 (de) | 2020-03-19 |
| KR20210032537A (ko) | 2021-03-24 |
| JP7040841B2 (ja) | 2022-03-23 |
| DE102018007141A1 (de) | 2019-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP4040921B1 (de) | Segmentierte steuerungsanordnung | |
| DE102018010305C5 (de) | Segmentierte Steuerungsanordnung | |
| DE102018010307B4 (de) | Segmentierte Steuerungsanordnung | |
| DE102019004530B4 (de) | Effiziente Leitungstreibervorrichtung zur Datenflusskontrolle | |
| EP3982595B1 (de) | Leitungstreibervorrichtung zur datenflusskontrolle | |
| DE102018010310B3 (de) | Effiziente Leitungstreibervorrichtung zur Datenflusskontrolle | |
| DE102018010311B3 (de) | Effiziente Leitungstreibervorrichtung zur Datenflusskontrolle | |
| DE202018006224U1 (de) | Effiziente Leitungstreibervorrichtung zur Datenflusskontrolle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20220328 |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 3827563 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20240202 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| INTG | Intention to grant announced |
Effective date: 20250217 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: H04B 3/02 20060101ALI20250207BHEP Ipc: G06F 13/00 20060101ALI20250207BHEP Ipc: H04L 12/403 20060101ALI20250207BHEP Ipc: H05B 47/21 20200101ALI20250207BHEP Ipc: H05B 47/165 20200101ALI20250207BHEP Ipc: H05B 47/18 20200101AFI20250207BHEP |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 3827563 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RAP3 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: INOVA SEMICONDUCTORS GMBH |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502019013162 Country of ref document: DE |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: APP_14708/2025 Effective date: 20250326 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250618 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250620 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20250618 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250627 Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 3032496 Country of ref document: ES Kind code of ref document: T3 Effective date: 20250721 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20250618 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250804 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20250718 Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250703 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250702 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250731 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250702 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250802 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502019013162 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: H13 Free format text: ST27 STATUS EVENT CODE: U-0-0-H10-H13 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250402 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: L10 Free format text: ST27 STATUS EVENT CODE: U-0-0-L10-L00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250616 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20250630 |
|
| 26N | No opposition filed |
Effective date: 20260105 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250616 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250630 |