EP4238469B1 - Reinigungsgerät mit erkennung des zustands einer oberfläche und verfahren - Google Patents
Reinigungsgerät mit erkennung des zustands einer oberfläche und verfahren Download PDFInfo
- Publication number
- EP4238469B1 EP4238469B1 EP22160122.2A EP22160122A EP4238469B1 EP 4238469 B1 EP4238469 B1 EP 4238469B1 EP 22160122 A EP22160122 A EP 22160122A EP 4238469 B1 EP4238469 B1 EP 4238469B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- control unit
- cleaning
- cleaned
- electric motor
- cleaning element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/32—Carpet-sweepers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/32—Carpet-sweepers
- A47L11/33—Carpet-sweepers having means for storing dirt
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4044—Vacuuming or pick-up tools; Squeegees
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4094—Accessories to be used in combination with conventional vacuum-cleaning devices
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/2831—Motor parameters, e.g. motor load or speed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/06—Control of the cleaning action for autonomous devices; Automatic detection of the surface condition before, during or after cleaning
Definitions
- the invention relates to a device for cleaning a floor surface comprising a control unit, a cleaning element for picking up dirt by moving the cleaning element on the surface to be cleaned and an electric motor for moving the cleaning element.
- the invention further relates to a method.
- floor cleaning devices that are equipped with complex systems for determining the type of floor surface. Such floor cleaning devices can, for example, detect whether a carpet surface or a hard floor surface is being cleaned. Examples of this can be found in the publications DE102007021299A1 and EP3000374A1 described. However, the sensitivity of the measurements known from this is not sufficient to reliably detect the condition of a surface, such as excessive contamination. Such knowledge of the condition of a surface is of interest in order to be able to optimize a cleaning process.
- the publication EP 3 479 745 A1 describes a method for operating a blower and a brush of a vacuum cleaner. An induced voltage of an electric motor is taken into account when controlling the operation.
- the publication US 2016/0000288 A1 relates to a self-propelled cleaning device with a movement unit for moving a housing, a blower for sucking dust on a floor surface into the housing, a dust detection unit for detecting dust in the air flow, and a controller for controlling the movement unit and the blower.
- the device described in the publication DE 20 2019 101 338 A1 The invention described relates to a system comprising a first soil tillage device which is operated exclusively manually by a user within an environment and a second soil tillage device which is operated exclusively automatically, wherein the second soil tillage device orients itself and localizes itself within an environment.
- the device comprises an electric motor for moving the cleaning element.
- the electric motor comprises a stator and a rotor, so that a counter-electromotive force can occur.
- the counter-electromotive force is the electromotive force that is created by the rotation of the rotor in a magnetic field. When the motor rotates, energy is built up that is directed against the operating voltage. This is called the counter-electromotive force.
- the control unit is configured in such a way that during a cleaning process of a surface, a power supply to the electric motor is temporarily interrupted. After the temporary interruption of the power supply, the course of the current intensity is recorded by the control unit during the interruption of the power supply. Preferably, the course of the current intensity is recorded immediately after the interruption of the power supply.
- the course of the current intensity depends on the frictional force between the surface to be cleaned and the cleaning element. If a textile is attached to the cleaning element, the course of the current intensity depends on the frictional force between the surface to be cleaned and the textile attached to the cleaning element.
- the control unit can therefore determine a measure of the frictional resistance between a surface to be cleaned and the cleaning element or the textile based on the recorded course of the current intensity.
- the frictional resistance By determining the frictional resistance, information can be obtained on the condition of the surface to be cleaned. This information can be used to optimize the cleaning process.
- the information is so precise that not only the type of surface can be recognized, but also the condition of each surface. For example, it is not only possible to distinguish between a carpet surface and a smooth or structured surface made of a solid material, but also the condition of a carpet surface and the condition of a smooth or structured surface made of a solid material.
- the control unit can be configured so that both the type and the condition of a surface to be cleaned are determined by the measure of the frictional resistance is detected. Areas that are particularly dirty, damaged, worn or dented can therefore be detected. For example, if an area of a carpet is dented, the distance between the cleaning element and the surface to be cleaned increases. The frictional resistance between the cleaning element and the surface to be cleaned decreases, usually abruptly, as soon as the device reaches a dented area. Dented areas can be detected, for example, by comparing them with stored empirical values.
- Such a surface can be a hard floor surface.
- Such a surface can be a laminate floor or a parquet floor.
- Such a surface can be a surface made of cork, vinyl or another plastic.
- Such a surface can be made of tiles. The tiles can be made of stone or ceramic.
- the control unit can therefore be set up to identify an area as heavily soiled if a relatively small change in the frictional resistance is detected and the device otherwise knows that a smooth surface consisting of a solid material is being cleaned.
- the control unit can therefore be set up to identify an area as a dented carpet pile if a relatively small change in the frictional resistance is detected and the device otherwise knows that a carpet surface is being cleaned. If the level of frictional resistance on a carpet surface decreases, a dented or excessively worn area of a carpet pile can be detected. If the level of frictional resistance on a smooth surface increases, an excessively soiled area of the smooth surface can be detected.
- the control unit may know what type of surface is being cleaned because the control unit has automatically detected this beforehand.
- the control unit may, for example, have automatically detected that a smooth hard floor surface is being cleaned. If the control unit detects a sudden change in the frictional resistance and the change in the cleaning resistance is relatively small, then this can be interpreted by the control unit as a relatively heavily soiled area.
- the control unit can be set up in such a way that it can create and save a map of surfaces to be cleaned.
- the layout of carpets and other surfaces can then be saved in the map.
- the conditions of surfaces can be saved in the map depending on location. For example, the layout of an excessively worn area of a surface can be saved.
- the control unit can be set up in such a way that it can access a stored map of surfaces to be cleaned. The control unit then knows the layout of the various surfaces during cleaning and can thus recognize the type of surface to be cleaned during cleaning with the help of the stored map or by taking the stored map into account.
- the control unit can be set up in such a way that when recognizing the condition of a surface to be cleaned, it also takes into account the type of surface being cleaned. The control unit then knows what type of surface is being cleaned based on the map or by taking the map into account.
- control unit knows from the map that a carpet is being cleaned. If a drop in frictional resistance is detected during carpet cleaning and this is as small as would typically occur in the case of a dented carpet pile, an area with dented carpet pile is detected.
- control unit knows that a hard floor with a smooth surface is being cleaned. If an increase in frictional resistance is detected during cleaning of the hard floor and this is as low as it typically occurs in the case of a particularly dirty area, a heavily soiled area is detected.
- the control unit can be set up in such a way that it can create a map of heavily soiled areas and, if applicable, the type of soiling and store it electronically.
- the control unit can be set up in such a way that it can create a map of areas with dented carpet pile or heavily worn areas and store it electronically.
- the control unit can be set up in such a way that it can compare these frictional resistances with frictional resistances that have occurred in the past at the same location. If the control unit determines that, for the same type of surface, the cleaning resistance at the same location always changes abruptly in the same way, an excessively worn area can be detected. For example, walking paths can be detected in this way.
- the control unit can be set up so that it can carry out a cluster analysis.
- Cluster analysis is a method for discovering similarity structures in data sets. Groups of "similar" objects are referred to as clusters.
- the control device can be set up so that one or more maps with clusters are created in order to gain insights into surfaces that have already been cleaned. These insights can be used to optimize future cleaning processes. These insights can be made available to other cleaning devices. These insights can, for example, be stored in a database that other cleaning devices can also access.
- One or more stored maps can be used to solve problems. For example, in the case of heavily soiled, sticky areas, a map of this can be sent to a mopping robot. After receiving the map, the mopping robot can wipe the sticky areas in a targeted manner and thus clean them. If the device itself can clean with a damp cloth, the device itself can, if necessary, approach sticky areas several times and wipe them with a damp cloth. In the case of a dented carpet pile, the device can approach the areas identified and electronically stored in a map and electronically marked against the pile direction in order to straighten up the dented carpet pile. If the device has a control for a liquid supply to a cleaning element of the device, the device can clean sticky areas with a higher liquid supply than normal. In the case of previously detected heavily soiled areas, the device can, for example, increase the speed of movement of the cleaning element in order to wipe heavily soiled areas particularly thoroughly.
- the device has a suction device for sucking up particles, heavily soiled areas can be cleaned automatically with increased suction power.
- instructions can be transmitted to a user, for example via a display and/or a loudspeaker on the device, in order to, for example, increase the cleaning intensity of heavily soiled areas.
- the cleaning element is preferably a roller that can rotate about its axis at a high speed of at least 500 revolutions per minute, preferably at least 1000 or 1500 revolutions per minute.
- a roller that rotates at a high speed conditions of surfaces to be cleaned can be detected particularly precisely, largely independently of the speed at which the device is moved over the surface to be cleaned.
- the electric motor can rotate the roller at these speeds.
- bristles, knobs or lamellae protrude from the surface of the cleaning element, which borders on a surface to be cleaned during operation, in order to optimise cleaning results.
- the surface and/or bristles, knobs or lamellae protruding from the surface are made of an elastically deformable material.
- the material can be an elastomer.
- the cleaning element with which the condition of a surface can be detected is not intended or suitable for the attachment of a textile. This avoids interference that can occur due to the type of textile used.
- the measure of the frictional resistance also changes abruptly and relatively strongly.
- Such an abrupt and relatively strong change in the Frictional resistance occurs, for example, when the cleaning device switches from a hard floor surface to a carpet surface or vice versa. If the control device detects a relatively strong change in frictional resistance, this can be recognized by the control device as a change in the type of surface to be cleaned.
- the control device can be configured to change cleaning settings of the device when a change in the type of surface is detected. For example, the speed of movement of the cleaning element can be changed when changing between a hard floor surface and a carpet surface.
- the cleaning element can be a rotating roller, for example, which rotates more slowly on hard floors than on carpets. If a hard floor is being cleaned, the rotation speed is lower than 3000 revolutions per minute. The rotation speed can then be between 1000 and 2000 revolutions per minute, for example. If a carpet is being cleaned, the rotation speed is higher than 3000 revolutions per minute. The rotation speed can then be between 4000 and 5000 revolutions per minute, for example. This allows the cleaning to be optimized in order to achieve optimized cleaning results and/or to keep energy consumption low.
- the cleaning element can be a plate.
- the plate can, for example, rotate and thus move.
- the plate can, for example, vibrate and thus move.
- the electric motor can move the plate in at least one of the aforementioned ways.
- the device can comprise a suction device to be able to suck up loose particles.
- the suction power can be changed if a change in the type of surface is detected due to a sudden change in frictional resistance.
- the suction power can be reduced if a change from a hard floor surface to a carpet is detected in order to optimise cleaning results and/or keep energy consumption low.
- Empirical values for typical sudden changes or for typical frictional resistances can be stored in the control device, for example, in order to identify types and conditions of surfaces by comparing them with stored sudden changes and/or values for typical frictional resistances.
- Typical sudden changes and/or empirical values for typical frictional resistances can be stored in an external database that can be retrieved by the device via a data connection.
- the device can, for example, comprise a radio module in order to be able to wirelessly receive sudden changes and/or empirical values for typical frictional resistances from the database.
- control unit is configured such that the frictional resistance is determined by determining a time period ⁇ t from the interruption of the power supply until a predetermined reduced value of the current is reached. If the power supply for the electric motor is interrupted, the magnetic fields of the electric motor are reduced. In addition, the motor continues to rotate due to inertia, with the behavior of the motor depending on the aforementioned frictional resistance. This influences the course of the current.
- there is a predetermined reduced value of the current The value is reduced because the value is lower than the value of the current when the power is supplied to the motor.
- the reduced value can be less than 0.5 A, for example.
- the reduced value can be 0 A, for example.
- the control device determines the time period that elapses until the reduced value is reached. This time period or this time period ⁇ t is then a measure of the aforementioned frictional resistance if a fixed speed of the motor is assumed during operation. The control device therefore determines a measure of the frictional resistance by determining the said time period ⁇ t.
- the control unit can be configured so that the power supply to the electric motor is interrupted at regular intervals.
- the interval can be at least 100 ⁇ s and/or at most 200 ⁇ s. If the interval is 150 ⁇ s, for example, the power supply to the electric motor is interrupted every 150 ⁇ s. If the length of the interval is no more than 200 ⁇ s, detection can be carried out as often as necessary to be able to recognize localized changes in the state of a surface. A lower limit of 100 ⁇ s is appropriate so as not to disrupt the cleaning operation in a way that is relevant to practice.
- the control unit can be configured so that the type and/or condition of a surface to be cleaned can also be detected with the aid of one or more additional sensors of the device. However, for reasons of simplicity, it is preferable not to use additional sensors.
- the control unit can be configured so that the electric motor is supplied with electrical current for rotating the cleaning element at a target speed.
- the speed of the electric motor and thus the speed of the cleaning element can be kept approximately constant using a speed control.
- the selection of a target speed basically depends on the type of surface to be cleaned.
- the picking up of dirt from the floor surface by the motor-driven cleaning element preferably takes place by moving dirt on the floor surface from the cleaning element in the direction of a suction opening of the device. The dirt is then sucked in by the suction opening.
- control unit comprises a processor and a memory with a computer program code, i.e. instructions that can be stored in the memory.
- the processor, the memory and the computer program code are configured such that a method with several method steps can be carried out.
- the device may comprise an attachment for a vacuum cleaner or may be an attachment for a vacuum cleaner.
- the device may be a vacuum cleaner that can also be used for wet mopping.
- the device for cleaning a floor surface can be a floor vacuum cleaner with a handle for movement by a user or a corresponding combination of a base part of a vacuum cleaner and an attachment attached to the base part.
- the device is an attachment for a base device, wherein the base device together with the attachment forms a functional vacuum polisher or vacuum mop.
- the device is a floor vacuum cleaner with a wiping function, i.e. a vacuum mop
- the device or an attachment of the device preferably comprises a Cleaning roller.
- the device is a suction polisher
- the device or an attachment of the device comprises, for example, a polishing wheel.
- a data interface can be provided between the attachment and the base unit in order to exchange information or commands between the base unit and the attachment.
- the base unit can then comprise the control unit.
- the device can be a cleaning robot, for example a vacuum robot, which moves independently for cleaning, i.e. which does not have to be moved manually by a user for cleaning.
- the device can be part of a vacuum robot that can also wipe with a damp cloth.
- the vacuum robot can comprise a plate-shaped cleaning element to which liquid can be supplied and to which a textile can be attached.
- the vacuum robot can have a roller to be able to pick up loose dirt.
- An attachment is in particular a separate functional component (e.g. of a suction polisher or suction mop) that can typically be connected to a base unit, in particular a suction polisher or suction mop, via a mechanical and/or electrical connection.
- a suction opening of the attachment can be connected to a suction line of the base unit in a fluid-tight manner. Fluid-tight means that, for example, air can be sucked in by a fan located in the base unit with sufficiently low power loss through the suction opening of the attachment so that a floor surface can be cleaned.
- the electric motor for driving the cleaning element is arranged in the attachment.
- the same base unit can form a suction polisher or suction mop depending on the type of attachment.
- a base unit comprises a fan for sucking in air, which is sucked in from the floor surface via the attachment and directed to the base unit, which is or can be connected to the attachment.
- the base unit comprises a filter chamber.
- the fan transports the sucked-in dirt from the floor surface through a suction line to the filter chamber.
- the dirt is separated and collected in the filter chamber, in particular by means of a filter or a dust filter bag.
- the filter chamber can be detached to remove the collected dirt or to change a dust filter bag.
- the base unit may comprise a liquid container from which liquid can flow to the cleaning element via one or more channels.
- the attachment unit may comprise a liquid container from which liquid can flow to the cleaning element via one or more channels.
- the electric motor drives the cleaning element, preferably via a gear.
- the electric motor drives a cleaning roller for rotation about a roller axis that is oriented parallel to the underside of the device and/or parallel to the floor surface.
- the electric motor for the cleaning element does not drive a fan.
- a fan is driven by a separate fan motor.
- a rotation axis of a cleaning element, in particular a roller axis of a cleaning roller runs transversely to a feed direction in which the device is typically moved for cleaning or moves autonomously.
- a cleaning roller is in particular a bristle roller with a large number of brushes that protrude radially from the cylindrical roller.
- the brushes or bristles can improve the transport of dirt, i.e. fine dust, dust and/or coarse material, and/or remove it from the floor.
- the cleaning roller is in particular designed as a hollow cylindrical body and/or is preferably arranged within a suction chamber.
- a suction chamber can be formed using sealing lips between the underside and the floor surface, with the suction opening being arranged within the suction chamber in order to suck air out of this suction chamber so that the pressure within the suction chamber is low compared to the ambient pressure.
- the sealing lips extend from the underside of the attachment to the floor surface.
- a hard floor surface corresponds, for example, to the surface finish of tiled flooring, laminate or parquet flooring, in particular according to IEC 62885-2:2016.
- a carpet surface corresponds, for example, to the surface finish of Wilton carpet, in particular BIC3 according to IEC 62885 (e.g. based on a classification of 1 to 5) or according to IEC 62885-2:2016, Annex C.1 - Wilton Carpet.
- the electric motor is a direct current motor. Due to the attractive and repulsive forces exerted by several magnetic fields on each other (Lorentz force), a rotor relative to a stator. The rotor moves a shaft which transmits a torque, in particular via a gear, to the cleaning roller.
- the stator can comprise a permanent magnet or electrical coils with windings.
- the rotor can comprise electrical coils with windings or a permanent magnet. By changing the current flow through the coils during rotation of the rotor relative to the stator, continuous rotation is achieved.
- a stator is a stationary, magnetically acting part of an electric motor. In particular, the stator is firmly connected to a motor housing.
- a rotor is a rotating, magnetically acting part of an electric motor that rotates a shaft.
- the electric motor is preferably a brush motor or DC motor with a brush, also known as a BDC motor.
- the stator then surrounds an internal rotor.
- the stator is located inside and the rotor rotates around the stator.
- the rotor comprises an armature and coils.
- the armature is preferably an iron core of the rotor, around which the coils of the rotor are wound to form at least pole shoes.
- a pole shoe is a bulge in the iron core that is intended to concentrate the magnetic field at this point.
- a commutator is provided in an electric motor with a brush in order to reverse the direction of current in the coils depending on the rotational position.
- a commutator is in particular a disk with electrical connections in the form of ring-segment-like sections of the disk, each of which is electrically connected to a coil.
- a brush is used to electrically connect an electrical circuit to the connections on the rotating disk.
- the electric motor can be a brushless DC motor.
- An iron core wound with winding wire forms a coil.
- the iron core is preferably made of stacked sheets, which are preferably electrically insulated from one another.
- the stator comprises the iron core.
- the rotor comprises the iron core with wound coil.
- the electric motor is designed as an internal rotor motor.
- the electric motor is a reluctance motor, in particular with a fixed coil. as a stator and a rotating iron as a rotor, which preferably has a gear-like shape with radially extending projections for forming pole teeth.
- the device can comprise a liquid supply device through which liquid can be supplied to the cleaning element.
- a liquid supply device through which liquid can be supplied to the cleaning element.
- a textile is a flat structure made of flexible material that has been produced using a textile-forming technique such as weaving or knitting.
- a cloth is an example of a textile.
- the textile can be a cloth with fibers or threads sticking out from its surface in order to better absorb dirt.
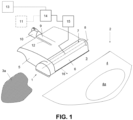
- the Figure 1 shows a schematic representation of a device 1 for cleaning a floor surface 2.
- the floor surface 2 has a first area with the surface finish of a hard floor surface 3 and an adjacent second area with the surface finish of a carpet surface 4.
- the hard floor surface 3 has a heavily soiled area 3a.
- the carpet surface 4 has an area 4a with indented carpet pile.
- the device 1 comprises a housing 5 with a semi-cylindrical tunnel 6. Inside the tunnel 6 there is a cleaning roller 7 as a cleaning element. During operation, the cleaning roller 7 can rotate about the roller axis 8 in the direction indicated by the arrow. The cleaning roller 7 can contact the floor surface 2.
- the rotating cleaning roller 7 transports dirt from the floor surface 2 in the direction of a Fig.1 concealed suction opening which is present at the end of a suction channel 9 of the device 1.
- the suction channel 9 can be connected to a base unit (not shown) via a connection 10.
- the base unit can comprise a fan 11 for sucking in air.
- the device 1 can comprise a channel 12 through which liquid can be passed to a second, for example plate-shaped, cleaning element. A cloth attached to the second cleaning element can be moistened in this way in order to be able to wipe with a damp cloth.
- the device 1 and/or a base unit for the device 1 can have a user interface 13.
- the user interface 13 can be used to select between automatic operation and manual operation.
- automatic operation for example, a rotation speed of the roller 7 and/or a speed of the fan 11 and/or a liquid supply via the channel 12 can be automatically controlled. This cannot happen in manual operation.
- a control unit 14 can control the power supply of the electric motor 15 as well as the rotation speed of the roller 7, the speed of the fan 11 and/or the Control liquid supply.
- the control unit 14 has access to information about the current and voltage applied to the electric motor 15.
- the control unit 14 and/or the electric motor 15 can be located inside the housing 5.
- the control unit 14 and/or the electric motor 15 can be arranged outside the housing 5, for example in the base part mentioned.
- the device 1 can be moved manually in the direction of the arrow 16 for cleaning, for example.
- the device 1 of the Fig.1 can be a part of a vacuum cleaner or a part for a vacuum cleaner.
- the device 1 can be an attachment for a vacuum cleaner.
- the Figure 2 shows a diagram of a current I over a time t. This is the current curve of the electric motor 15 of the Fig.1
- the diagram shows a first current profile 17 (shown with a solid line) and a second current profile 18 (shown with a dashed line), each of which shows a current intensity profile before the interruption 19 of the power supply to the electric motor 15.
- the current intensity of the power supply is set by the control unit 14 in such a way that a target speed of the roller 7 is achieved. If a gear with a gear ratio other than 1 is used, a target speed of the rotor differs from the target speed of the roller 7.
- the supplied current intensity of the first current path 17 is intended in particular for cleaning a carpet 4 and is on average higher than the supplied current intensity of the second current path 18, which is intended in particular for cleaning a hard floor surface 3.
- the roller 7 then rotates at a higher speed on the carpet 4 than on the hard floor surface 3.
- the current I drops, which is shown by the current intensity curve 20.
- the current intensity required the time period ⁇ t 1 to fall from the level of the first current waveform 17 for cleaning a carpet after the power supply was interrupted to zero amperes.
- the current intensity required the time period ⁇ t 2 to fall from the Level of the second current waveform 18 for cleaning a hard floor to drop to zero amperes after the power supply is interrupted.
- the time period ⁇ t is therefore measured up to a predetermined value (here, for example, 0 A).
- This time period ⁇ t is a measure of the frictional resistance that occurs between the cleaning element, in this case the roller 7, and the hard floor surface 3 or the carpet surface 4. If a sudden increase from the value ⁇ t 2 to the value ⁇ t 1 is determined, it is detected that the hard floor surface 3 is no longer being cleaned, but now the carpet surface 4. In the case of a sudden increase from ⁇ t 2 to ⁇ t 1 , the movement speed of the cleaning element 7 and/or the suction power can be changed as appropriate in order to optimise the cleaning process. If necessary, the supply of liquid can be stopped. The second cleaning element can be raised to avoid contact with the carpet surface.
- a map can be created electronically by cluster analysis in which the position of hard floor surface 3 and the position of carpet surface 4 are stored.
- the Figure 3 shows the current intensity curve that can occur when the carpet surface 4 is cleaned. If the device 1 reaches the area 4a with the depressed carpet pile, the interaction between the roller 7 and the carpet surface 4a decreases. This results in the current intensity decreasing more quickly and reaching the value 0 A after a time period ⁇ t' 1 . If the control unit 14 registers a reduction in the time period from ⁇ t 1 to ⁇ t' 1 , the control unit 14 detects an area with an increased distance between the roller 7 and the surface to be cleaned. If the control unit 14 knows, for example based on a stored map, that this area 4a did not exist before, then the control unit 14 determines that it is depressed carpet pile. If the control unit 14 determines, for example, based on the map that the area 4a is permanently present, the control unit 14 determines that it is a heavily worn area.
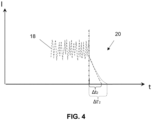
- the Figure 4 shows the current intensity curve that can occur when the hard floor surface 3 is cleaned. If the heavily soiled area 3a is reached by the device 1, the interaction between the roller 7 and the hard floor surface 3a increases. This results in the current intensity decreasing more slowly and only after a time period ⁇ t' 2 does it reach the value 0 A. If the control unit 14 registers an increase in the time period from ⁇ t 2 to ⁇ t' 2 , the control unit 14 detects an area with an increased friction force between roller 7 and the surface to be cleaned. The control unit 14 thus determines that this is a heavily soiled area.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Nozzles For Electric Vacuum Cleaners (AREA)
Description
- Die Erfindung betrifft eine Vorrichtung zum Reinigen einer Bodenoberfläche umfassend eine Steuerungseinheit, ein Reinigungselement zum Aufnehmen von Schmutz durch ein Bewegen des Reinigungselements auf der zu reinigenden Oberfläche und einen Elektromotor zum Bewegen des Reinigungselementes. Die Erfindung betrifft ferner ein Verfahren.
- Es gibt Bodenreinigungsgeräte, die mit komplexen Systemen zur Ermittlung der Art einer Bodenoberfläche ausgestattet sind. Solche Bodenreinigungsgeräte können beispielsweise erkennen, ob eine Teppichoberfläche oder eine Hartbodenoberfläche gereinigt wird. Beispiele hierfür sind in den Druckschriften
DE102007021299A1 undEP3000374A1 beschrieben. Die Empfindlichkeit der hieraus bekannten Messungen reicht jedoch nicht aus, um auch einen Zustand einer Oberfläche, so Beispiel den Zustand einer übermäßigen Verschmutzung, zuverlässig detektieren zu können. Eine solche Kenntnis des Zustands einer Oberfläche ist von Interesse, um einen Reinigungsvorgang optimieren zu können. Die DruckschriftEP 3 479 745 A1 beschreibt ein Verfahren zum Betrieb eines Gebläses sowie einer Bürste eines Staubsaugers, Eine induzierte Spannung eines Elektromotors wird bei der Steuerung des Betriebs berücksichtigt. Die DruckschriftUS 2016/0000288 A1 betrifft ein selbstfahrendes Reinigungsgerät mit einer Bewegungseinheit für ein Bewegen eines Gehäuses, einem Gebläse, um Staub auf einer Bodenoberfläche in das Gehäuse saugen zu können, einer Stauberkennungseinheit für ein Erkennen von Staub im Luftstrom, und einer Steuerung für ein Steuern der Bewegungseinheit sowie des Gebläses. Die in der DruckschriftDE 20 2019 101 338 A1 beschriebene Erfindung betrifft ein System aus einem ausschließlich manuell von einem Nutzer innerhalb einer Umgebung geführten ersten Bodenbearbeitungsgerät und einem ausschließlich automatisch betriebenen zweiten Bodenbearbeitungsgerät, wobei das zweite Bodenbearbeitungsgerät sich innerhalb einer Umgebung orientiert und zu lokalisiert. - Es ist Aufgabe der Erfindung, eine Vorrichtung zum Reinigen einer Oberfläche bereitzustellen, mit dem nicht nur die Art, sondern auch ein Zustand einer Oberfläche zuverlässig detektiert werden kann. Es ist auch Aufgabe der Erfindung, ein entsprechendes Verfahren zu schaffen.
- Zur Lösung der Aufgabe dient eine Vorrichtung zum Reinigen einer Oberfläche gemäß dem Hauptanspruch sowie ein Verfahren gemäß dem Nebenanspruch. Vorteilhafte Ausführungsformen ergeben sich aus den abhängigen Ansprüchen.
- Die Vorrichtung umfasst einen Elektromotor zum Bewegen des Reinigungselementes. Der Elektromotor umfasst einen Stator und einen Rotor, so dass eine gegenelektromotorische Kraft auftreten kann. Die gegenelektromotorische Kraft ist die elektromotorische Kraft, die durch die Rotation des Rotors in einem magnetischen Feld entsteht. Dreht sich der Motor, so baut sich eine entgegen der Betriebsspannung gerichtete Energie auf. Diese wird gegenelektromotorische Kraft genannt.
- Die Steuerungseinheit ist so konfiguriert, dass während eines Reinigungsvorgangs einer Oberfläche eine Stromversorgung des Elektromotors vorübergehend unterbrochen wird. Nach der vorübergehenden Unterbrechung der Stromversorgung wird der Verlauf der Stromstärke von der Steuerungseinheit während der Unterbrechung der Stromversorgung erfasst. Vorzugsweise erfolgt die Erfassung des Verlaufs der Stromstärke unmittelbar im Anschluss an die Unterbrechung der Stromversorgung.
- Der Verlauf der Stromstärke hängt während des Reinigungsbetriebs von der Reibungskraft zwischen der zu reinigenden Oberfläche und dem Reinigungselement ab. Ist ein Textil an dem Reinigungselement angebracht, dann hängt der Verlauf der Stromstärke von der Reibungskraft zwischen der zu reinigenden Oberfläche und dem an dem Reinigungselement angebrachten Textil ab. Die Steuerungseinheit kann daher aufgrund des erfassten Verlaufs der Stromstärke ein Maß für den Reibungswiderstand zwischen einer zu reinigenden Oberfläche und dem Reinigungselement bzw. dem Textil ermitteln.
- Durch Ermittlung des Reibungswiderstands können daher Informationen zum Zustand der zu reinigenden Oberfläche ermittelt werden. Diese Informationen können für eine Optimierung des Reinigungsvorgangs genutzt werden. Die Informationen sind derart genau, dass nicht nur die Art einer Oberfläche erkannt werden kann, sondern zusätzlich auch der Zustand einer jeden Oberfläche. Es kann also beispielsweise nicht nur zwischen einer Teppichoberfläche und einer aus einem Feststoff bestehenden glatten oder strukturierten Oberfläche unterschieden werden, sondern auch der Zustand einer Teppichoberfläche sowie der Zustand einer aus einem Feststoff bestehenden glatten oder strukturierten Oberfläche.
- Die Steuerungseinheit kann so konfiguriert sein, dass sowohl die Art als auch der Zustand einer zu reinigenden Oberfläche durch das Maß für den Reibungswiderstand detektiert wird. Es können also Bereiche detektiert werden, die besonders stark verschmutzt, beschädigt, abgenutzt oder eingedrückt sind. Ist beispielsweise ein Bereich eines Teppichs eingedrückt, dann vergrößert sich der Abstand zwischen dem Reinigungselement und der zu reinigenden Oberfläche. Der Reibungswiderstand zwischen dem Reinigungselement und der zu reinigenden Oberfläche verringert sich und zwar in der Regel sprunghaft, sobald die Vorrichtung einen eingedrückten Bereich erreicht. Beispielsweise durch Vergleich mit hinterlegten Erfahrungswerten können eingedrückte Bereiche detektiert werden.
- Übermäßig verschmutzte Bereiche können ebenfalls den Reibungswiderstand sprunghaft verändern und können daher ebenfalls detektiert werden. Dies gilt vor allem für Verschmutzungen auf glatten Oberflächen, die aus einem harten oder nachgiebigen Material bestehen. Eine solche Oberfläche kann eine Hartbodenoberfläche sein. Eine solche Oberfläche kann ein Laminatfußboden oder ein Parkettfußboden sein. Eine solche Oberfläche kann eine aus Kork, Vinyl oder einem anderen Kunststoff gebildete Oberfläche sein. Eine solche Oberfläche kann aus Fliesen gebildet sein. Die Fliesen können aus Stein oder Keramik bestehen.
- Ändert sich der Reibungswiderstand aufgrund von übermäßig stark verschmutzen Bereichen oder aufgrund eines eingedrückten Teppichflors, also aufgrund einer Änderung des Zustands einer Oberfläche, so ist diese Änderung relativ gering im Vergleich zu einer Änderung, die auftritt, wenn zwischen einer glatten Oberfläche und einer Teppichoberfläche gewechselt wird. Die Steuerungseinheit kann daher so eingerichtet sein, dass diese einen Bereich als stark verschmutzt identifiziert, wenn eine relativ geringe Änderung des Reibungswiderstands detektiert wird und die Vorrichtung ansonsten weiß, dass eine glatte, aus einem Feststoff bestehende Oberfläche gereinigt wird. Die Steuerungseinheit kann daher so eingerichtet sein, dass diese einen Bereich als eingedrückten Teppichflor identifiziert, wenn eine relativ geringe Änderung des Reibungswiderstands detektiert wird und die Vorrichtung ansonsten weiß, dass eine Teppichoberfläche gereinigt wird. Nimmt das Maß für den Reibungswiderstand auf einer Teppichoberfläche ab, so kann ein eingedrückter oder übermäßig stark abgenutzter Bereich eines Teppichflors detektiert werden. Nimmt das Maß für den Reibungswiderstand auf einer glatten Oberfläche zu, so kann ein übermäßig stark verschmutzter Bereich der glatten Oberfläche detektiert werden.
- Der Steuerungseinheit kann bekannt sein, welche Art einer Oberfläche gereinigt wird, weil die Steuerungseinheit dies zuvor automatisiert detektiert hat. Die Steuerungseinheit kann also beispielsweise automatisiert detektiert haben, dass eine glatte Hartbodenoberfläche gereinigt wird. Wird nun durch die Steuerungseinheit eine sprunghafte Änderung des Reibungswiderstands detektiert und ist die Änderung des Reinigungswiderstands relativ gering, dann kann dies als ein relativ stark verschmutzter Bereich von der Steuerungseinheit interpretiert werden.
- Die Steuerungseinheit kann so eingerichtet sein, dass diese eine Karte von zu reinigenden Oberflächen erstellen und abspeichern kann. In der Karte kann dann die Anordnung von Teppichen und anderen Oberflächen abgespeichert sein. In der Karte können ortsabhängig Zustände von Oberflächen abgespeichert sein. Es kann also beispielsweise die Anordnung eines übermäßig abgenutzten Bereichs einer Oberfläche abgespeichert sein.
- Die Steuerungseinheit kann so eingerichtet sein, dass diese auf eine abgespeicherte Karte von zu reinigenden Oberflächen zugreifen kann. Die Steuerungseinheit kennt dann während einer Reinigung die Anordnung der verschiedenen Oberflächen und kann so während einer Reinigung die Art einer zu reinigenden Oberfläche mit Hilfe der abgespeicherten Karte oder unter Berücksichtigung der eingespeicherten Karte erkennen. Die Steuerungseinheit kann so eingerichtet sein, dass diese bei der Erkennung des Zustands einer zu reinigenden Oberfläche auch die Art der Oberfläche berücksichtigt, die gereinigt wird. Die Steuerungseinheit weiß dann aufgrund der Karte oder unter Berücksichtigung der Karte, welche Art einer Oberfläche gereinigt wird.
- Beispielsweise aufgrund der Karte weiß die Steuerungseinheit, dass ein Teppich gereinigt wird. Wird während der Reinigung des Teppichs ein Abfall des Reibungswiderstands detektiert und ist dieser so gering, wie dieser typischerweise im Fall eines eingedrückten Teppichflors auftritt, so wird ein Bereich mit eingedrücktem Teppichflor erkannt.
- Beispielsweise aufgrund der Karte weiß die Steuerungseinheit, dass ein Hartboden mit glatter Oberfläche gereinigt wird. Wird während der Reinigung des Hartbodens ein Anstieg des Reibungswiderstands detektiert und ist dieser so gering, wie er typischerweise im Fall eines besonders stark verschmutzten Bereichs auftritt, so wird ein stark verschmutzter Bereich detektiert.
- Die Steuerungseinheit kann so eingerichtet sein, dass diese eine Karte von stark verschmutzten Bereichen und ggfs. auch der Art der Verschmutzung erstellen und elektronisch abspeichern kann. Die Steuerungseinheit kann so eingerichtet sein, dass diese eine Karte von Bereichen mit eingedrücktem Teppichflor oder stark abgenutzten Bereichen erstellen und elektronisch abspeichern kann.
- Die Steuerungseinheit kann so eingerichtet sein, dass diese Reibungswiderstände mit Reibungswiderständen vergleichen kann, die in der Vergangenheit an gleicher Stelle aufgetreten sind. Stellt die Steuerungseinheit so fest, dass bei gleicher Art einer Oberfläche sich ein Reinigungswiderstand an gleicher Stelle immer sprunghaft in gleicher Weise ändert, so kann so ein übermäßig abgenutzter Bereich detektiert werden. Es können so beispielsweise Laufwege detektiert werden.
- Die Steuerungseinheit kann so eingerichtet sein, dass diese eine Clusteranalyse durchführen kann. Mit Clusteranalyse ist ein Verfahren zur Entdeckung von Ähnlichkeitsstrukturen in Datenbeständen gemeint. Gruppen von "ähnlichen" Objekten werden als Cluster bezeichnet. Die Steuerungseinrichtung kann so eingerichtet sein, dass ein oder mehrere Karten mit Clustern erstellt werden, um so Erkenntnisse über bereits zuvor gereinigte Oberflächen zu gewinnen. Diese Erkenntnisse können zur Optimierung von zukünftigen Reinigungsvorgängen genutzt werden. Diese Erkenntnisse können anderen Reinigungsgeräten zur Verfügung gestellt werden. Diese Erkenntnisse können beispielsweise in einer Datenbank gespeichert werden, auf die auch andere Reinigungsgeräte zugreifen können.
- Abgespeicherte ein oder mehrere Karten können genutzt werden, um Probleme zu beheben. Es kann beispielsweise im Fall von stark verschmutzen, klebrigen Bereichen eine Karte davon an einen Wischroboter übermittelt werden. Nach Erhalt der Karte kann der Wischroboter gezielt die klebrigen Bereiche wischen und so reinigen. Falls die Vorrichtung selber feucht reinigen kann, kann die Vorrichtung selber klebrige Bereiche erforderlichenfalls mehrfach gezielt anfahren und feucht wischen. Im Fall eines eingedrückten Teppichflors kann die Vorrichtung die erkannten und in einer Karte elektronisch gespeicherten und elektronisch markierten Bereiche gegen die Florrichtung anfahren, um eingedrückten Teppichflor wieder aufzurichten. Verfügt die Vorrichtung über eine Steuerung für eine Flüssigkeitszufuhr zu einem Reinigungselement der Vorrichtung, so kann die Vorrichtung klebrige Bereiche mit einer gegenüber dem Normalfall erhöhten Flüssigkeitszufuhr reinigen. Die Vorrichtung kann im Fall von zuvor detektierten stark verschmutzten Bereichen beispielsweise die Bewegungsgeschwindigkeit des Reinigungselements erhöhen, um stark verschmutzte Bereiche besonders gründlich zu wischen.
- Verfügt die Vorrichtung über eine Saugeinrichtung zum Aufsaugen von Partikeln, so können stark verschmutzte Bereiche automatisiert mit erhöhter Saugleistung gereinigt werden.
- Wird die Vorrichtung manuell über eine zu reinigende Oberfläche bewegt, so können einem Benutzer Handlungsanweisungen beispielsweise über ein Display und/oder über einen Lautsprecher der Vorrichtung übermittelt werden, um beispielsweise stark verschmutzte Bereiche verstärkt zu reinigen.
- Bevorzugt ist das Reinigungselement eine Walze, die um ihre Achse mit hoher Drehzahl von wenigstens 500 Umdrehungen pro Minute, bevorzugt mit wenigstens 1000 oder 1500 Umdrehungen pro Minute, rotieren kann. Mit einer Walze, die mit hoher Umdrehungszahl rotiert, lassen sich besonders genau Zustände von zu reinigenden Oberflächen detektieren und zwar weitgehend unabhängig von der Geschwindigkeit, mit der die Vorrichtung über die zu reinigende Oberfläche bewegt wird. Der Elektromotor kann die Walze mit diesen Drehzahlen drehen.
- Bevorzugt stehen von der Oberfläche des Reinigungselements, die während des Betriebs an eine zu reinigende Oberfläche grenzt, Borsten, Noppen oder Lamellen ab, um Reinigungsergebnisse zu optimieren. Bevorzugt bestehen die Oberfläche und/ oder von der Oberfläche abstehende Borsten, Noppen oder Lamellen aus einem elastisch verformbaren Material. Das Material kann ein Elastomer sein.
- Bevorzugt ist das Reinigungselement, mit dem der Zustand einer Oberfläche detektiert werden kann, nicht für das Anbringen eines Textils bestimmt und geeignet. Es werden dadurch Störeinflüsse vermieden, die aufgrund der Art eines verwendeten Textils auftreten können.
- Ändert sich der Reibungswiderstand nicht allmählich, sondern sprunghaft und relativ stark, so ändert sich dann auch das Maß für den Reibungswiderstand sprunghaft und relativ stark. Eine solche sprunghafte und relativ starke Änderung des Reibungswiderstands tritt beispielsweise dann auf, wenn das Reinigungsgerät von einer Hartbodenoberfläche auf eine Teppichoberfläche wechselt oder umgekehrt. Detektiert die Steuerungseinrichtung eine relativ starke Änderung des Reibungswiderstands, so kann dies von der Steuerungseinrichtung als ein Wechsel der Art einer zu reinigenden Oberfläche erkannt werden.
- Die Steuerungseinrichtung kann so konfiguriert sein, dass Reinigungseinstellungen der Vorrichtung geändert werden, wenn ein Wechsel der Art einer Oberfläche detektiert wird. So kann die Bewegungsgeschwindigkeit des Reinigungselements geändert werden, wenn beispielsweise zwischen einer Hartbodenoberfläche und einer Teppichoberfläche gewechselt wird.
- Das Reinigungselement kann beispielsweise eine drehbare Walze sein, die mit auf Hartboden langsamer gedreht wird als auf Teppichboden. Wird ein Hartboden gereinigt, dann wird beispielsweise mit einer Umdrehungszahl gereinigt, die geringer als 3000 Umdrehungen pro Minute ist. Die Umdrehungszahl kann dann beispielsweise zwischen 1000 und 2000 Umdrehungen pro Minute liegen. Wird ein Teppich gereinigt, dann wird beispielsweise mit einer Umdrehungszahl gereinigt, die größer als 3000 Umdrehungen pro Minute ist. Die Umdrehungszahl kann dann beispielsweise zwischen 4000 und 5000 Umdrehungen pro Minute liegen. Es kann dadurch das Reinigen optimiert werden, um optimierte Reinigungsergebnisse zu erzielen und/oder um den Energiebedarf gering zu halten.
- Das Reinigungselement kann eine Platte sein. Die Platte kann beispielsweise rotieren und sich so bewegen. Die Platte kann beispielsweise vibrieren und sich so bewegen. Der Elektromotor kann die Platte in zumindest einer der vorgenannten Weisen bewegen.
- Die Vorrichtung kann eine Saugeinrichtung umfassen, um lose Partikel aufsaugen zu können. Die Saugleistung kann geändert werden, wenn ein Wechsel der Art einer Oberfläche aufgrund einer sprunghaften Änderung des Reibungswiderstands detektiert wird. Beispielsweise kann die Saugleistung reduziert werden, wenn ein Wechsel von einer Hartbodenoberfläche zu einem Teppich detektiert wird, um so Reinigungsergebnisse zu optimieren und/ oder den Energiebedarf gering zu halten.
- Erfahrungswerte für typische sprunghafte Änderungen oder für typische Reibungswiderstände können beispielsweise in der Steuerungseinrichtung gespeichert sein, um durch Vergleich mit gespeicherten sprunghaften Änderungen und/oder Werten für typische Reibungswiderstände Arten und Zustände von Oberflächen zu erkennen. Typische sprunghafte Änderungen und/oder Erfahrungswerte für typische Reibungswiderstände können in einer externen Datenbank gespeichert sein, die von der Vorrichtung über eine Datenverbindung abgerufen werden können. Die Vorrichtung kann beispielsweise ein Funkmodul umfassen, um drahtlos sprunghafte Änderungen und/oder Erfahrungswerte für typische Reibungswiderstände von der Datenbank erhalten zu können.
- In einer Ausgestaltung ist die Steuerungseinheit so konfiguriert, dass der Reibungswiderstand durch Bestimmen einer Zeitdauer Δt von der Unterbrechung der Stromversorgung bis zum Erreichen eines vorgegebenen reduzierten Wertes der Stromstärke erfolgt. Wird die Stromversorgung für den Elektromotor unterbrochen, so bauen sich Magnetfelder des Elektromotors ab. Außerdem dreht sich der Motor trägheitsbedingt weiter, wobei das Verhalten des Motors von dem genannten Reibungswiderstand abhängt. Dies beeinflusst den Verlauf der Stromstärke. Es gibt bei dieser Ausführungsform einen vorgegebenen reduzierten Wert der Stromstärke. Der Wert ist reduziert, weil der Wert geringer ist als der Wert der Stromstärke während der Stromzufuhr zum Motor. Der reduzierte Wert kann beispielweise kleiner als 0,5 A sein. Der reduzierte Wert kann beispielsweise 0 A sein. Es wird dann von der Steuerungseinrichtung der Zeitraum ermittelt, der vergeht, bis der reduzierte Wert erreicht ist. Dieser Zeitraum bzw. diese Zeitdauer Δt ist dann ein Maß für den genannten Reibungswiderstand, wenn von einer festgelegten Drehzahl des Motors während des Betriebs ausgegangen wird. Die Steuerungseinrichtung ermittelt folglich durch Ermittlung der genannten Zeitdauer Δt ein Maß für den Reibungswiderstand.
- Die Steuerungseinheit kann so konfiguriert sein, dass in einem regelmäßigen Intervall die Stromversorgung zum Elektromotor unterbrochen wird. Das Intervall kann mindestens 100 µs und/oder höchstens 200 µs betragen. Beträgt das Intervall beispielsweise 150 µs, dann wird alle 150 µs die Stromversorgung für den Elektromotor unterbrochen. Beträgt die Länge des Intervalls nicht mehr als 200 µs, so kann geeignet oft detektiert werden, um lokal begrenzte Zustandsänderungen einer Oberfläche erkennen zu können. Eine Untergrenze von 100 µs ist zweckmäßig, um den Reinigungsbetrieb nicht in praxisrelevanter Weise zu stören.
- Die Steuerungseinheit kann so konfiguriert sein, dass auch mithilfe von ein oder mehreren weiteren Sensoren der Vorrichtung die Art und/oder der Zustand einer zu reinigenden Oberfläche detektiert werden kann. Aus Gründen der Einfachheit ist aber zu bevorzugen, dass weitere Sensoren nicht verwendet werden.
- Die Steuerungseinheit kann so konfiguriert sein, dass der Elektromotor mit elektrischem Strom für ein Rotieren des Reinigungselements mit einer Soll-Drehzahl versorgt wird. Die Drehzahl des Elektromotors und damit die Drehzahl des Reinigungselements kann mithilfe einer Drehzahl-Regelung näherungsweise konstant gehalten werden. Die Auswahl einer Soll-Drehzahl hängt grundsätzlich von der Art einer zu reinigenden Oberfläche ab.
- Das Aufnehmen von Schmutz von der Bodenoberfläche durch das motorisch bewegte Reinigungselement, insbesondere einer rotierenden Reinigungswalze, erfolgt bevorzugt, indem Schmutz auf der Bodenoberfläche von dem Reinigungselement in Richtung einer Saugöffnung der Vorrichtung bewegt wird. Der Schmutz wird dann von der Saugöffnung eingesaugt.
- Vorzugsweise umfasst die Steuerungseinheit einen Prozessor und einen Speicher mit einem Computer-Programm-Code, d.h. auf dem Speicher speicherbare Befehle. Der Prozessor, der Speicher und der Computer-Programm-Code sind so konfiguriert, dass ein Verfahren mit mehreren Verfahrensschritten durchgeführt werden kann.
- Die Vorrichtung kann ein Vorsatzgerät für einen Staubsauger umfassen oder ein Vorsatzgerät für einen Staubsauger sein. Die Vorrichtung kann ein Staubsauger sein, mit dem auch feucht gewischt werden kann.
- Die Vorrichtung zum Reinigen einer Bodenoberfläche kann ein Bodenstaubsauger mit einem Stiel zum Bewegen durch einen Benutzer oder eine entsprechende Kombination eines Basisteils eines Staubsaugers und einem an dem Basisteil angebrachten Vorsatzgerät sein. In einer Ausgestaltung ist die Vorrichtung ein Vorsatzgerät für ein Basisgerät, wobei das Basisgerät gemeinsam mit dem Vorsatzgerät einen funktionsfähigen Saugpolierer oder Saugwischer bildet. Wenn die Vorrichtung ein Bodenstaubsauger mit Wischfunktion, also ein Saugwischer, ist, umfasst die Vorrichtung oder ein Vorsatzgerät der Vorrichtung vorzugsweise eine Reinigungswalze. Wenn die Vorrichtung ein Saugpolierer ist, umfasst die Vorrichtung oder ein Vorsatzgerät der Vorrichtung beispielsweise eine Polierscheibe.
- Insbesondere kann eine Datenschnittstelle zwischen dem Vorsatzgerät und dem Basisgerät vorgesehen sein, um Informationen oder Kommandos zwischen dem Basisgerät und dem Vorsatzgerät auszutauschen. Das Basisgerät kann dann die Steuerungseinheit umfassen.
- Die Vorrichtung kann ein Reinigungsroboter, beispielsweise ein Saugroboter, sein, der sich für ein Reinigen selbständig bewegt, der also für ein Reinigen nicht manuell durch einen Benutzer bewegt werden muss. Die Vorrichtung kann Teil eines Saugroboters sein, der auch feucht wischen kann. Der Saugroboter kann ein plattenförmiges Reinigungselement umfassen, dem Flüssigkeit zugeführt und an dem ein Textil angebracht werden kann. Zusätzlich kann der Saugroboter eine Walze aufweisen, um losen Schmutz aufnehmen zu können.
- Ein Vorsatzgerät ist insbesondere eine separate Funktionskomponente (z.B. eines Saugpolierers oder Saugwischers), die typischerweise über einen mechanischen und/oder elektrischen Anschluss mit einem Basisgerät, insbesondere eines Saugpolierers oder Saugwischers, verbunden werden kann. Eine Saugöffnung des Vorsatzgerätes kann fluiddicht mit einer Saugleitung des Basisgeräts verbunden werden oder sein. Fluiddicht bedeutet, dass z.B. Luft durch ein im Basisgerät befindliches Gebläse mit hinreichend geringem Leistungsverlust über die Saugöffnung des Vorsatzgeräts angesaugt werden kann, sodass eine Bodenoberfläche gereinigt werden kann. Insbesondere ist der Elektromotor zum Antreiben des Reinigungselements im Vorsatzgerät angeordnet. Insbesondere kann dasselbe Basisgerät in Abhängigkeit von der Art des Vorsatzgerätes einen Saugpolierer oder Saugwischer bilden.
- Insbesondere umfasst ein Basisgerät ein Gebläse zum Ansaugen von Luft, die über das Vorsatzgerät von der Bodenoberfläche angesaugt und an das Basisgerät geleitet wird, das an das Vorsatzgerät angeschlossen ist oder werden kann. Insbesondere umfasst das Basisgerät eine Filterkammer. Das Gebläse befördert den eingesaugten Schmutz von der Bodenoberfläche durch eine Saugleitung zur Filterkammer. In der Filterkammer wird der Schmutz abgesondert und gesammelt, insbesondere mithilfe eines Filters oder eines Staubfilterbeutels. Bevorzugt kann die Filterkammer gelöst werden, um den gesammelten Schmutz zu entfernen oder einen Staubfilterbeutel zu wechseln. Das Basisgerät kann einen Flüssigkeitsbehälter umfassen, von dem aus Flüssigkeit über ein oder mehrere Kanäle zum Reinigungselement gelangen kann. Das Vorsatzgerät kann einen Flüssigkeitsbehälter umfassen, von dem aus Flüssigkeit über ein oder mehrere Kanäle zum Reinigungselement gelangen kann.
- Der Elektromotor treibt das Reinigungselement an, bevorzugt über ein Getriebe. Insbesondere treibt der Elektromotor eine Reinigungswalze für ein Rotieren um eine Walzenachse an, die parallel zur Unterseite der Vorrichtung und/oder parallel zur Bodenoberfläche orientiert ist. Vorzugsweise treibt der Elektromotor für das Reinigungselement nicht ein Gebläse an. Insbesondere wird ein Gebläse durch einen separaten Gebläse-Motor angetrieben. Eine Rotationsachse eines Reinigungselements, insbesondere eine Walzenachse einer Reinigungswalze, verläuft quer zu einer Vorschubrichtung, in die die Vorrichtung für ein reinigen typischerweise bewegt wird oder sich autonom bewegt.
- Eine Reinigungswalze ist insbesondere eine Borstenwalze mit einer Vielzahl von Bürsten, die radial von der zylinderförmigen Walze abstehen. Durch die Bürsten oder Borsten kann Schmutz, also Feinstaub, Staub und/oder Grobgut, verbessert transportiert und/oder aus dem Boden herausgelöst werden. Die Reinigungswalze ist insbesondere als ein hohlzylindrischer Körper ausgestaltet und/oder vorzugsweise innerhalb eines Saugraumes angeordnet. Ein Saugraum kann mithilfe von Dichtlippen zwischen der Unterseite und der Bodenoberfläche gebildet werden, wobei die Saugöffnung innerhalb des Saugraumes angeordnet ist, um Luft aus diesem Saugraumes abzusaugen, damit innerhalb des Saugraumes ein geringer Druck im Vergleich zum Umgebungsdruck herrscht. Die Dichtlippen erstrecken sich dazu von der Unterseite des Vorsatzgerätes bis zur Bodenoberfläche.
- Eine Hartbodenoberfläche entspricht z.B. der Oberflächenbeschaffenheit von Fliesenboden, Laminat- oder Parkettboden, insbesondere gemäß IEC 62885-2:2016. Eine Teppichbodenoberfläche entspricht z.B. der Oberflächenbeschaffenheit von dem Teppich Wilton, insbesondere BIC3 gemäß Norm IEC 62885 (z.B. basierend auf einer Einstufung in 1 bis 5) oder gemäß IEC 62885-2:2016, Annex C.1 - Wilton Carpet.
- Insbesondere ist der Elektromotor ein Gleichstrommotor. Durch Anziehungs- und Abstoßungskräfte, die mehrere Magnetfelder aufeinander ausüben (Lorentzkraft), dreht sich ein Rotor relativ zu einem Stator. Der Rotor bewegt eine Welle, die ein Drehmoment, insbesondere über ein Getriebe, auf die Reinigungswalze überträgt. Der Stator kann einen Permanentmagneten oder elektrische Spulen mit Wicklungen umfassen. Der Rotor kann elektrische Spulen mit Wicklungen oder einen Permanentmagneten umfassen. Durch Verändern des Stromflusses durch die Spulen während des Umlaufs des Rotors relativ zum Stator wird ein kontinuierliches Drehen erreicht. Ein Stator ist ein feststehender, magnetisch wirkender Teil eines Elektromotors. Insbesondere ist der Stator fest mit einem Motorgehäuse verbunden. Ein Rotor ist ein sich drehender, magnetisch wirkender Teil eines Elektromotors, der eine Welle dreht.
- Vorzugsweise ist der Elektromotor ein Bürstenmotor oder Gleichstrommotor mit Bürste, auch BDC-Motor genannt. Insbesondere umgibt der Stator dann einen innenliegenden Rotor. Alternativ liegt der Stator innen und der Rotor dreht sich um den Stator. Der Rotor umfasst einen Anker und Spulen. Der Anker ist vorzugsweise ein Eisenkern des Rotors, um den die Spulen des Rotors gewickelt sind, um mindestens Polschuhe zu bilden. Ein Polschuh ist eine Ausbuchtung des Eisenkerns, die das Magnetfeld an diese Stelle bündeln soll. Ein Kommutator ist bei einem Elektromotor mit Bürste vorgesehen, um die Stromrichtung in den Spulen in Abhängigkeit von der Rotationsstellung umzukehren. Ein Kommutator insbesondere eine Scheibe mit elektrischen Anschlüssen in Form von ringsegmentartigen Abschnitten der Scheibe, die jeweils mit einer Spule elektrisch verbunden sind. Eine Bürste wird eingesetzt, um einen elektrischen Stromkreis mit den Anschlüssen auf der sich drehenden Scheibe elektrisch leitend zu verbinden. Wenn sich die Scheibe zusammen mit dem Rotor dreht, wird durch die in Umfangrichtung getrennt angeordneten, ringsegmentartigen Abschnitte bzw. Anschlüsse der Spulen ein Umpolen einer Spule in Abhängigkeit von der Drehposition des Rotors zum Stator erreicht.
- Alternativ kann der Elektromotor ein bürstenloser Gleichstrommotor sein. Ein mit Wicklungsdraht umwickelter Eisenkern bildet eine Spule. Der Eisenkern ist bevorzugt aus gestapelten Blechen hergestellt, die vorzugsweise gegeneinander elektrisch isoliert sind. Insbesondere umfasst der Stator den Eisenkern. Alternativ oder ergänzend umfasst der Rotor den Eisenkern mit umwickelter Spule. Vorzugsweise ist der Elektromotor als ein Innenläufermotor ausgeführt. Alternativ ist es auch möglich, dass der Elektromotor als ein Außenläufermotor ausgeführt ist. In einer Ausgestaltung ist der Elektromotor ein Reluktanzmotor, insbesondere mit einer feststehenden Spule als Stator und ein rotierendes Eisen als Rotor, der vorzugsweise eine zahnradartige Form mit sich radial erstreckenden Vorsprüngen zum Ausbilden von Polzähnen hat.
- Die Vorrichtung kann eine Flüssigkeitszuführeinrichtung umfassen, durch die Flüssigkeit dem Reinigungselement zugeführt werden kann. Es kann also beispielsweise ein oder mehrere Kanäle geben, durch die hindurch Flüssigkeit zum Reinigungselement strömen kann. Ist ein Textil an dem Reinigungselement angebracht, so kann das Textil durch die zum Reinigungselement strömende Flüssigkeit befeuchtet werden. Es kann dann eine Oberfläche mithilfe des feuchten Textils gereinigt werden.
- Mit Textil ist ein flächiges Gebilde aus flexiblem Material gemeint, das durch eine textilbildende Technik wie zum Beispiel Weben oder Stricken hergestellt worden ist. Ein Tuch ist ein Beispiel für ein Textil. Das Textil kann ein Tuch mit von seiner Oberfläche abstehenden Fasern oder Fäden sein, um verbessert Schmutz aufnehmen zu können.
- Die Erfindung betrifft auch ein Verfahren zum Reinigen einer Oberfläche mit einer zuvor beschriebenen Vorrichtung. Das Verfahren umfasst folgende Schritte:
- Unterbrechen einer Stromversorgung des Elektromotors, der ein Reinigungselement für ein Reinigen einer Oberfläche bewegt;
- Erfassen eines Stromstärkenverlaufs des Elektromotors nach dem Unterbrechen der Stromversorgung;
- Detektieren des Zustands der Oberfläche.
- Nachfolgend wird die Erfindung auch anhand von Figuren näher erläutert. Merkmale der Ausführungsbeispiele können einzeln oder in einer Mehrzahl mit den beanspruchten Gegenständen und offenbarten Aspekten der Erfindung kombiniert werden, sofern nichts Gegenteiliges angegeben wird. Die beanspruchten Schutzbereiche sind nicht auf die Ausführungsbeispiele beschränkt.
- Es zeigen:
- Figur 1:
- Schematische Darstellung einer Vorrichtung zum Reinigen einer Bodenoberfläche;
- Figur 2 bis 4:
- Schematische Darstellungen von Stromverläufen über die Zeit.
- Die
Figur 1 zeigt eine schematische Darstellung einer Vorrichtung 1 zum Reinigen einer Bodenoberfläche 2. Die Bodenoberfläche 2 hat einen ersten Bereich mit der Oberflächenbeschaffenheit einer Hartbodenoberfläche 3 und einen daran angrenzenden, zweiten Bereich mit der Oberflächenbeschaffenheit einer Teppichbodenoberfläche 4. Die Hartbodenoberfläche 3 weist einen stark verschmutzen Bereich 3a auf. Die Teppichoberfläche 4 weist einen Bereich 4a mit eingedrücktem Teppichflor auf. - Die Vorrichtung 1 umfasst ein Gehäuse 5 mit einem halbzylinderartigen Tunnel 6. Innerhalb des Tunnels 6 befindet sich eine Reinigungswalze 7 als Reinigungselement. Die Reinigungswalze 7 kann im Betrieb in der durch den Pfeil angezeigten Richtung um die Walzenachse 8 rotieren. Die Reinigungswalze 7 kann die Bodenoberfläche 2 kontaktieren.
- Zum Reinigen der Bodenoberfläche 2 befördert die rotierende Reinigungswalze 7 Schmutz von der Bodenoberfläche 2 in Richtung einer in
Fig. 1 verdeckten Einsaugöffnung, die am Ende eines Saugkanals 9 der Vorrichtung 1 vorhanden ist. Der Saugkanal 9 kann über einen Anschluss 10 mit einem nicht gezeigten Basisgerät verbunden sein. Das Basisgerät kann ein Gebläse 11 zum Ansaugen von Luft umfassen. Die Vorrichtung 1 kann einen Kanal 12 umfassen, durch den hindurch Flüssigkeit zu einem zweiten, beispielsweise plattenförmigen Reinigungselement geleitet werden kann. Ein an dem zweiten Reinigungselement angebrachtes Tuch kann so befeuchtet werden, um auch feucht wischen zu können. - Die Vorrichtung 1 und/oder ein Basisgerät für die Vorrichtung 1 können eine Benutzerschnittstelle 13 aufweisen. Beispielsweise kann mit der Benutzerschnittstelle 13 zwischen einem Automatik-Betrieb und einem Manuell-Betrieb ausgewählt werden. Im Automatik-Betrieb kann beispielsweise eine Rotationsgeschwindigkeit der Walze 7 und/oder eine Drehzahl des Gebläses 11 und/oder eine Flüssigkeitszufuhr über den Kanal 12 automatisiert geregelt werden. Im Manuell-Betrieb kann dies nicht geschehen.
- Eine Steuerungseinheit 14 kann die Stromversorgung des Elektromotors 15 sowie die Rotationsgeschwindigkeit der Walze 7, die Drehzahl des Gebläses 11 und/oder die Flüssigkeitszufuhr steuern. Dazu hat die Steuerungseinheit 14 Zugriff auf eine Information über die Stromstärke und Spannung, die am Elektromotor 15 anliegt. Die Steuerungseinheit 14 und/oder der Elektromotor 15 können sich innerhalb des Gehäuses 5 befinden. Die Steuerungseinheit 14 und/oder der Elektromotor 15 können außerhalb des Gehäuses 5 beispielweise in dem genannten Basisteil angeordnet sein. Die Vorrichtung 1 kann beispielsweise in Richtung des Pfeils 16 für ein Reinigen manuell bewegt werden.
- Die Vorrichtung 1 der
Fig. 1 kann ein Teil eines Staubsaugers oder ein Teil für einen Staubsauger sein. Die Vorrichtung 1 kann ein Vorsatzgerät für einen Staubsauger sein. - Die
Figur 2 zeigt ein Diagramm einer Stromstärke I über eine Zeit t. Es handelt es sich dabei um den Stromverlauf des Elektromotors 15 derFig. 1 . Das Diagramm zeigt einen ersten Stromverlauf 17 (dargestellt mit einer durchgezogenen Linie) und einen zweiten Stromverlauf 18 (dargestellt mit einer gestrichelten Linie), die jeweils einen Verlauf einer Stromstärke vor der Unterbrechung 19 der Stromversorgung des Elektromotors 15 zeigen. Vor der Unterbrechung 19 wird die Stromstärke der Stromversorgung insbesondere derart von der Steuerungseinheit 14 eingestellt, dass eine Soll-Drehzahl der Walze 7 erreicht wird. Wenn ein Getriebe mit einem Übersetzungsverhältnis ungleich 1 eingesetzt wird, unterscheidet sich eine Soll-Drehzahl des Rotors von der Soll-Drehzahl der Walze 7. - Die zugeführte Stromstärke des ersten Stromverlaufs 17 ist insbesondere für eine Reinigung eines Teppichbodens 4 vorgesehen und liegt durchschnittlich höher als die zugeführte Stromstärke des zweiten Stromverlaufs 18, die insbesondere für eine Reinigung einer Hartbodenoberfläche 3 vorgesehen ist. Auf dem Teppichboden 4 rotiert dann die Walze 7 mit einer größeren Geschwindigkeit als auf der Hartbodenoberfläche 3.
- Nach der Unterbrechung 19 der Stromversorgung fällt die Stromstärke I ab, was durch den Stromstärkenverlauf 20 gezeigt wird. Die Zeitdauer Δt von der Unterbrechung 19 bis zum Erreichen bzw. Unterschreiten eines vordefinierten, reduzierten Wertes, hier Null Ampere, wird gemessen. In dem Ausführungsbeispiel der
Fig. 2 benötigte die Stromstärke die Zeitdauer Δt1, um von dem Niveau des ersten Stromverlaufs 17 für die Reinigung eines Teppichbodens nach dem Unterbrechen der Stromversorgung auf Null Ampere abzufallen. Analog benötigte die Stromstärke die Zeitdauer Δt2, um von dem Niveau des zweiten Stromverlaufs 18 für die Reinigung eines Hartbodens nach dem Unterbrechen der Stromversorgung auf Null Ampere abzufallen. - Es wird also die Zeitdauer Δt bis auf einen vorgegebenen Wert (hier z.B. 0 A) gemessen. Diese Zeitdauer Δt ist ein Maß für den Reibungswiderstand, der zwischen dem Reinigungselement, also hier der Walze 7, und der Hartbodenoberfläche 3 bzw. der Teppichbodenoberfläche 4 auftritt. Wird ein sprunghafter Anstieg vom Wert Δt2 auf den Wert Δt1 festgestellt, so wird detektiert, dass nicht mehr die Hartbodenoberfläche 3, sondern nun die Teppichoberfläche 4 gereinigt wird. Es können im Fall des sprunghaften Anstiegs von Δt2 auf Δt1 die Bewegungsgeschwindigkeit des Reinigungselements 7 und/oder die Saugleistung geeignet geändert werden, um den Reinigungsvorgang zu optimieren. Ggfs. kann eine Flüssigkeitszufuhr gestoppt werden. Es kann das zweite Reinigungselement angehoben werden, um einen Kontakt mit der Teppichoberfläche zu vermeiden. Es kann eine Karte elektronisch durch Clusteranalyse erstellt werden, in der die Lage von Hartbodenoberfläche 3 und die Lage der Teppichoberfläche 4 abgespeichert werden.
- Die
Figur 3 zeigt den Stromstärkenverlauf, der auftreten kann, wenn die Teppichoberfläche 4 gereinigt wird. Wird durch die Vorrichtung 1 der Bereich 4a mit dem eingedrückten Teppichflor erreicht, so nimmt die Wechselwirkung zwischen der Walze 7 und der Teppichoberfläche 4a ab. Dies hat zur Folge, dass die Stromstärke schneller abnimmt und bereits nach einer Zeitdauer Δt'1 den Wert 0 A erreicht. Registriert die Steuerungseinheit 14 eine Reduzierung der Zeitdauer von Δt1 auf Δt'1, so detektiert die Steuerungseinheit 14 einen Bereich mit einem vergrößerten Abstand zwischen Walze 7 und der zu reinigenden Oberfläche. Weiß die Steuerungseinheit 14 beispielsweise aufgrund einer abgespeicherten Karte, dass es diesen Bereich 4a früher nicht gegeben hat, dann ermittelt die Steuerungseinheit 14, dass es sich um niedergedrückten Teppichflor handelt. Ermittelt die Steuerungseinheit 14 beispielsweise aufgrund der Karte, dass der Bereich 4a dauerhaft vorhanden ist, so ermittelt die Steuerungseinheit 14, dass es sich um einen stark abgenutzten Bereich handelt. - Die
Figur 4 zeigt den Stromstärkenverlauf, der auftreten kann, wenn die Hartbodenfläche 3 gereinigt wird. Wird durch die Vorrichtung 1 der stark verschmutze Bereich 3a erreicht, so nimmt die Wechselwirkung zwischen der Walze 7 und der Hartbodenfläche 3a zu. Dies hat zur Folge, dass die Stromstärke langsamer abnimmt und erst nach einer Zeitdauer Δt'2 den Wert 0 A erreicht. Registriert die Steuerungseinheit 14 eine Erhöhung der Zeitdauer von Δt2 auf Δt'2, so detektiert die Steuerungseinheit 14 einen Bereich mit einer vergrößerten Reibungskraft zwischen Walze 7 und der zu reinigenden Oberfläche. Die Steuerungseinheit 14 ermittelt so, dass es sich um einen stark verschmutzten Bereich handelt.
Claims (15)
- Vorrichtung (1) zum Reinigen einer Oberfläche (2) umfassend eine Steuerungseinheit (14), ein bewegliches Reinigungselement (7), einen Elektromotor (15) zum Bewegen des Reinigungselements (7), dadurch gekennzeichnet, dass eine Flüssigkeitszuführeinrichtung (12) für die Zufuhr einer Flüssigkeit zu dem Reinigungselement (7) vorhanden ist, wobei die Steuerungseinheit (14) so konfiguriert ist, dass während eines Reinigungsvorgangs der Oberfläche (2) eine Stromversorgung des Elektromotors (15) vorübergehend unterbrochen wird und die Steuerungseinheit (14) nach der Unterbrechung anhand eines erfassten Stromstärkenverlaufs (20) des Elektromotors (15) den Zustand einer zu reinigenden Oberfläche ermittelt.
- Vorrichtung (1) nach dem vorhergehenden Anspruch, dadurch gekennzeichnet, dass die die Steuerungseinheit (14) so eingerichtet ist, dass diese ein oder mehrere der folgenden Zustände ermitteln kann:• verschmutzter Bereich (3a) einer Oberfläche (3);• eingedrückter Teppichflor (4a) einer Teppichoberfläche (4);• abgenutzter Bereich einer Oberfläche.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Steuerungseinheit (14) so konfiguriert ist, dass die Steuerungseinheit (14) nach der Unterbrechung anhand eines erfassten Stromstärkenverlaufs (20) des Elektromotors (15) die Art einer zu reinigenden Oberfläche ermittelt.
- Vorrichtung (1) nach dem vorhergehenden Anspruch, dadurch gekennzeichnet, dass die die Steuerungseinheit (14) so eingerichtet ist, dass diese als Art einer zu reinigenden Oberfläche eine Teppichoberfläche (4) sowie eine Hartbodenoberfläche (3) ermitteln kann.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Steuerungseinheit (14) so eingerichtet ist, dass diese eine Karte von zu reinigenden Oberflächen (2) mit Arten (3, 4) der Oberflächen und Zuständen (3a, 4a) der Oberflächen (2) erstellen und abspeichern kann.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Steuerungseinheit (14) so eingerichtet ist, dass diese auf eine abgespeicherte Karte von zu reinigenden Oberflächen zugreifen kann.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Steuerungseinheit (14) so eingerichtet ist, dass diese die Bewegungsgeschwindigkeit des Reinigungselements (7) erhöht, wenn ein stark verschmutzter Bereich gereinigt wird.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Vorrichtung (1) eine Saugeinrichtung (9, 15) umfasst und die Steuerungseinheit (14) so eingerichtet ist, dass diese die Saugleistung erhöht, wenn ein stark verschmutzter Bereich (3a) gereinigt wird.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Reinigungselement eine Walze (7) ist, die mit einer Drehzahl von wenigsten 1500 Umdrehungen pro Minute durch den Elektromotor (15) gedreht werden kann.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Steuerungseinheit (14) so konfiguriert ist, dass nach der Unterbrechung eine Zeitdauer (Δt) ermittelt wird, die vergeht, um einen vordefinierten, reduzierten Wert der Stromstärke zu ermitteln.
- Vorrichtung (1) nach dem vorhergehenden Anspruch, dadurch gekennzeichnet, dass die Steuerungseinheit (14) so konfiguriert ist, dass mithilfe der Zeitdauer (Δt) ein Zustand einer Oberfläche detektiert wird.
- Vorrichtung (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Steuerungseinheit (14) so konfiguriert ist, dass in einem regelmäßigen Intervall die Stromversorgung zum Elektromotor (15) unterbrochen wird.
- Vorrichtung (1) nach dem vorhergehenden Anspruch, dadurch gekennzeichnet, dass das Intervall mindestens 100 µs und/oder höchstens 200 µs beträgt.
- Verfahren zum Reinigen einer Oberfläche mit einer Vorrichtung (1) nach einem der vorhergehenden Ansprüche, gekennzeichnet durch die Schritte:• Unterbrechen einer Stromversorgung des Elektromotors (15), der ein Reinigungselement (7) für ein Reinigen einer Oberfläche (2) bewegt;• Erfassen eines Stromstärkenverlaufs (20) des Elektromotors (15) nach dem Unterbrechen der Stromversorgung;
gekennzeichnet durch• Detektieren des Zustands der zu reinigenden Oberfläche (2). - Verfahren nach dem vorhergehenden Anspruch, dadurch gekennzeichnet, dass ein Bereich (4a) mit eingedrücktem Teppichflor detektiert wird und im Anschluss daran die Vorrichtung (1) gegen die Florrichtung des eingedrückten Teppichflors für ein Wiederaufrichten angefahren wird.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22160122.2A EP4238469B1 (de) | 2022-03-04 | 2022-03-04 | Reinigungsgerät mit erkennung des zustands einer oberfläche und verfahren |
| CN202310199330.7A CN116687268A (zh) | 2022-03-04 | 2023-03-03 | 具有表面状态识别的清洁设备和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22160122.2A EP4238469B1 (de) | 2022-03-04 | 2022-03-04 | Reinigungsgerät mit erkennung des zustands einer oberfläche und verfahren |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4238469A1 EP4238469A1 (de) | 2023-09-06 |
| EP4238469B1 true EP4238469B1 (de) | 2024-07-31 |
Family
ID=80628955
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22160122.2A Active EP4238469B1 (de) | 2022-03-04 | 2022-03-04 | Reinigungsgerät mit erkennung des zustands einer oberfläche und verfahren |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4238469B1 (de) |
| CN (1) | CN116687268A (de) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102007021299B4 (de) | 2007-05-07 | 2013-07-18 | BSH Bosch und Siemens Hausgeräte GmbH | Verfahren und Vorrichtung zum Steuern der Drehzahl zumindest eines Elektromotors in einem mobilen Gerät, insbesondere in einer Saugbürstenvorrichtung oder einem Staubsammelroboter |
| JP2014236838A (ja) * | 2013-06-07 | 2014-12-18 | シャープ株式会社 | 自走式掃除機 |
| KR20160037460A (ko) | 2014-09-29 | 2016-04-06 | 엘지전자 주식회사 | 진공 청소기 |
| DE102017125956A1 (de) * | 2017-11-07 | 2019-05-09 | Miele & Cie. Kg | Verfahren zum Betrieb eines elektrischen Antriebs, vorzugsweise eines Gebläses und/oder einer Bürste eines Staubsaugers oder eines Staubsaugroboters |
| DE102019101338A1 (de) * | 2019-01-18 | 2020-07-23 | Vorwerk & Co. Interholding Gmbh | System aus einem ausschließlich manuell geführten Bodenbearbeitungsgerät und einem ausschließlich automatisch betriebenen Bodenbearbeitungsgerät sowie Verfahren zum Betrieb eines solchen Systems |
-
2022
- 2022-03-04 EP EP22160122.2A patent/EP4238469B1/de active Active
-
2023
- 2023-03-03 CN CN202310199330.7A patent/CN116687268A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP4238469A1 (de) | 2023-09-06 |
| CN116687268A (zh) | 2023-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102010000573B4 (de) | Verfahren zur Leistungssteuerung eines Saug-/Kehrgeräts | |
| EP1642522B1 (de) | Verfahren zum Pflegen und/oder Reinigen eines Bodenbelages | |
| DE10261787B3 (de) | Mobiles Bodenbearbeitungsgerät | |
| DE102007011381B3 (de) | Verfahren zur Erkennung eines Bodenbelages | |
| EP2245974B1 (de) | Verfahren zum Betrieb eines Vorsatzgeräts für einen Staubsauger und korrespondierendes Vorsatzgerät | |
| EP3416018B1 (de) | System mit mindestens zwei bodenbearbeitungsgeräten | |
| EP3967198B1 (de) | Sich selbsttätig fortbewegendes bodenbearbeitungsgerät | |
| WO2008128751A1 (de) | Verfahren zur betreiben einer rotationsbürstenanordnung und rotationsbürstenanordnung zur durchführung eines solchen verfahrens | |
| DE102018115669A1 (de) | Bodenbearbeitungsgerät mit einem Basisgerät und einem lösbar mit dem Basisgerät verbindbaren Vorsatzgerät | |
| DE102023107579A1 (de) | Minimierung der lachenbildung für autonomen nassreinigungsroboter | |
| EP4238470B1 (de) | Bodenreinigungsgerät mit steuerung einer flüssigkeitszufuhr sowie verfahren | |
| DE10346216B3 (de) | Verfahren zur Reinigung einer Bodenfläche mittels eines Bodenreinigungssystems und Bodenreinigungssystem zur Durchführung des Verfahrens | |
| WO2013079334A1 (de) | Verfahren zur bearbeitung einer textilen bodenfläche mittels eines bodenreinigungsgerätes sowie bodenreinigungsgerät | |
| EP4238469B1 (de) | Reinigungsgerät mit erkennung des zustands einer oberfläche und verfahren | |
| EP2939581B1 (de) | Selbstfahrendes reinigungsgerät und betriebsverfahren für ein selbstfahrendes reinigungsgerät | |
| DE102012107765B4 (de) | Robotsauger und Verfahren zum Betrieb eines Robotsaugers | |
| DE102007014548A1 (de) | Verfahrbares Haushalts-Bodenfeuchtreinigungsgerät | |
| DE19916427A1 (de) | Haushaltsroboter zum automatischen Staubsaugen von Bodenflächen | |
| EP4147624B1 (de) | Bodenreinigungsgerät mit bodenerkennung und verfahren | |
| EP3235414A1 (de) | Verfahren zur leistungsanpassung eines akkumulatorbetriebenen staubsaugers | |
| EP4098166B1 (de) | Bodendüse für staubsauger, staubsauger, bürstenwalzenset und verfahren zum betreiben eines staubsaugers | |
| EP3970584A1 (de) | Staubsauger, vorzugsweise handstaubsauger | |
| DE102019204625B3 (de) | Reinigungsroboter mit Abstandssensoren | |
| EP4212082B1 (de) | Staubsauger, vorzugsweise handstaubsauger | |
| DE102019218514A1 (de) | Roboter zur Oberflächenpflege, Seitenbürste sowie Verfahren zur Regelung eines seitlichen Abstands eines Roboters |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240126 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240321 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: APP_35632/2024 Effective date: 20240613 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502022001328 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241101 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241031 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241031 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241031 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241130 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241101 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502022001328 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20250501 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250331 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240731 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: H13 Free format text: ST27 STATUS EVENT CODE: U-0-0-H10-H13 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250304 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20250331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250304 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20260320 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20260301 Year of fee payment: 5 |