EP4434847A1 - Procédé et système de détection et de caractérisation de défauts géométriques d'une voie ferrée - Google Patents
Procédé et système de détection et de caractérisation de défauts géométriques d'une voie ferrée Download PDFInfo
- Publication number
- EP4434847A1 EP4434847A1 EP24163258.7A EP24163258A EP4434847A1 EP 4434847 A1 EP4434847 A1 EP 4434847A1 EP 24163258 A EP24163258 A EP 24163258A EP 4434847 A1 EP4434847 A1 EP 4434847A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- defects
- transverse
- track
- railway track
- railway
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 26
- 230000007547 defect Effects 0.000 claims abstract description 100
- 238000001514 detection method Methods 0.000 claims abstract description 15
- 230000001133 acceleration Effects 0.000 claims description 54
- 238000005096 rolling process Methods 0.000 claims description 32
- 238000005259 measurement Methods 0.000 claims description 16
- 238000004088 simulation Methods 0.000 claims description 15
- 230000003750 conditioning effect Effects 0.000 claims description 7
- 238000005457 optimization Methods 0.000 claims description 7
- 238000004364 calculation method Methods 0.000 claims description 6
- 230000000737 periodic effect Effects 0.000 claims description 5
- 238000012512 characterization method Methods 0.000 claims description 3
- 230000006399 behavior Effects 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 238000002955 isolation Methods 0.000 description 3
- 238000012876 topography Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000002068 genetic effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002028 premature Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/042—Track changes detection
- B61L23/047—Track or rail movements
Definitions
- the invention relates to the railway sector and more specifically concerns the monitoring of geometric defects in railway tracks.
- the invention relates more particularly to a method and a system for detecting geometric defects in a railway track, these defects being the expression of an undesirable deformation of the railway track.
- the geometry of railway tracks is an essential parameter for rail traffic. Indeed, the number of geometric defects in the track and especially their amplitude must be as low as possible to allow trains to run while ensuring comfort for passengers and avoiding premature damage to equipment.
- the geometric defects represented respectively on the Figures 1A to 1D , are mainly of four types.
- the second ( Figure 1B ), dressing, is an abrupt change in the position of the two rails in the plane of the track over a short distance relative to the track layout.
- the third ( Figure 1C ), cross-leveling, also called left, is a subsidence or raising of one of the rails of the track over a short distance.
- the fourth defect ( Figure 1D ), longitudinal leveling is an abnormal subsidence or elevation of the two rails of the track over a short distance (i.e. a distance of a few tens of meters).
- the system described in this publication is not able to detect all geometric defects of the railway track, and in particular gauge and straightening defects, in particular because the lateral trajectory of the axles is different from the lateral position of the rails.
- the invention thus aims to propose a method for detecting all of the geometry defects in the railway track without interfering with the commercial circulation of trains.
- the invention also aims to propose a system for detecting geometry defects in a railway track which does not require the integration of complex and expensive measuring instruments.
- the invention also relates to a system for detecting and characterizing geometry defects of a railway track comprising two opposing rails, capable of being installed on railway rolling stock and of implementing the method as described above, which system comprises at least means configured to measure vertical accelerations undergone by said rolling stock at the level of the two opposing rails and control means connected to said vertical acceleration measuring means.
- the invention also relates to railway rolling stock comprising at least one body extending along a longitudinal axis and at least two axles and a system for detecting and characterizing geometry defects of a railway track as described above.
- the present invention relates to a method for detecting geometry defects in railway tracks. This method is implemented by a simple and inexpensive detection system, which is installed on a commercial train.
- the system of the invention is intended to be installed on rolling stock of the commercial train type intended for the transport of passengers or freight.
- any commercial train can be used. Not only does this avoid the occupation of the railway track by trains solely dedicated to measurements for the purpose of track maintenance, but in addition the measurements can be carried out on a large number of tracks, and the frequency of measurements on each track is simply limited by the number of commercial trains running on the railway track.
- train will be used to define railway rolling stock, but it goes without saying that the system of the invention can be installed on any type of railway rolling stock.
- the train on which the detection system of the invention is installed is put into circulation on a railway track comprising two opposing rails and of which one wishes to know the topography and determine all the geometry defects - that is to say the longitudinal and transverse leveling defects, the straightening and the gauge defects.
- the train which extends along a longitudinal axis, comprises at least one body and at least two axles, each axle comprising two axle boxes arranged at its respective ends.
- the train comprises several bodies and in fact several axles.
- the detection system comprises means for measuring the accelerations undergone by the various elements of the train running on the railway track.
- the detection system thus comprises a vertical accelerometer installed on each axle box.
- the system therefore comprises at least two vertical accelerometers installed at a distance from each other in a transverse direction: the two vertical accelerometers are therefore at the same level. transverse, to enable the measurement of two vertical accelerations undergone by the train at the level of the respective rails.
- the system also includes a vertical accelerator installed on each bogie of the train, which helps in the calibration of the models used to refine the estimation of dressing and gauge defects.
- the system comprises at least one transverse accelerometer installed on an axle whose axle boxes are themselves equipped with vertical accelerometers. Furthermore, the system may comprise one or two transverse - or lateral - accelerometers respectively installed on one of the train bodies and on one of the bogies.
- the detection system also includes a geographic positioning device of the GPS (for “Global Positioning System”) type, wireless communication means and control and command means typically comprising at least one processor and a memory space, which are generally integrated into the train control means.
- GPS Global Positioning System
- control and command means typically comprising at least one processor and a memory space, which are generally integrated into the train control means.
- the system of the invention which is intended to be installed on the train, comprises at least three vertical accelerometers, three transverse accelerometers, a geographic positioning device, wireless communication means and control and command means.
- the train is equipped with the detection system of the invention and runs on the railway track whose topography is to be known and more particularly on which it is desired to detect geometric defects in longitudinal and transverse leveling, dressing and gauges.
- control means control the periodic acquisition of two vertical accelerations experienced by the train at two opposite measurement points located at the same transverse level, of a transverse acceleration experienced by the train and of a geographical position of the train.
- the control means then associate, for each acquisition period, the geographical position acquired with the transverse acceleration value and the pair of vertical acceleration values considered.
- control means determine, for each acquired geographical position, a pair of vertical arrows from the two vertical accelerations considered, for example with spatial filtering.
- the pair of vertical arrows thus determined corresponds to a vertical movement of the train above each rail of the railway track, on the same transverse level.
- the control means compare the successive pairs of vertical arrows. In other words, each pair of arrows determined from vertical accelerations acquired at a determined period is compared with the pair of arrows determined from the vertical accelerations acquired at the immediately following period. If the difference two by two between the arrows of the successive pairs is greater than a determined threshold, then the control means identify the presence of a leveling defect and associate it with the geographical position considered. Furthermore, if the threshold being exceeded only concerns one of the two vertical arrows of the pair, then the control means identify a transverse leveling defect, while if the threshold being exceeded concerns both vertical arrows of the pair, then the control means identify a longitudinal leveling defect.
- the control means select from a database, stored in the memory space of said control means, data corresponding to one or more standard railway tracks similar to the railway track under study on which the train runs.
- a standard railway track whose recommended running speeds, tonnage and type of trains running on this standard railway track are equivalent to those of the railway track under study.
- the database includes the topography of this standard track as well as a list of all geometry defects - longitudinal and transverse levelling, dressings and gauges - and their respective geographical positions.
- the database also includes data on transverse accelerations and lateral trajectories of axles of known railway rolling stock running on this standard track.
- lateral trajectories of the axle is meant the transverse component of displacement of the axle.
- the statistical dependence between the different geometric defects of the standard railway track is determined by a calculation of covariance between a first series of variables corresponding to the longitudinal and transverse leveling defects of the standard track and a second series of variables corresponding to the dressing and gauge defects of the standard railway track.
- This statistical dependency is then applied, during a sixth step, to the vertical defects of the railway track previously determined on which the train equipped with the geometric defect detection system runs.
- the control means then deduce an estimate of the defects in the dressing and gauges of the railway track, as well as their respective geographical positions.
- the fourth and fifth steps are supplemented by the statistical dependence with the transverse accelerations or the associated trajectories of the axle determined by double integration of the transverse accelerations which would be, in the step of constructing the statistical dependencies, measured by the system for detecting and characterizing railway defects, or simulated on the standard track.
- These enriched dependencies are applied to estimate the dressing and gauge defects by conditioning.
- Conditioning methods are analysis methods well known to those skilled in the art - for example Gaussian conditioning - during which the dependence of the solution of a problem (here the alignment and gauge defects of the railway track) is measured with respect to the data of said problem (here the longitudinal and transverse leveling defects of the railway track).
- control means improve the estimation of the defects in the dressing and gauges of the railway track by using the transverse acceleration measurements by the transverse accelerometers considered.
- the control means perform a simulation of the dynamic behavior of the train on the vertical, straightening and gauge defects of the railway track estimated previously, for example using a railway dynamics model - for example a rigid body railway dynamics code - which uses as input data the estimation of the geometric defects of the railway track carried out in the previous step, and also the longitudinal and transverse leveling defects determined in the third step, the layout of the railway track, the speed of the train and the mechanical characteristics of the train.
- a railway dynamics model - for example a rigid body railway dynamics code - which uses as input data the estimation of the geometric defects of the railway track carried out in the previous step, and also the longitudinal and transverse leveling defects determined in the third step, the layout of the railway track, the speed of the train and the mechanical characteristics of the train.
- Concerning the "dynamic behavior of the train" on the track corresponds to the accelerations that the train undergoes, to the forces that the train transmits to the track, and to the forces that transit in the various suspensions of the train.
- the output data of the railway dynamics model form a set of accelerations or axle trajectories. These will allow the estimation of the defects in the dressing and gauges of the railway track by solving the associated inverse problem.
- the results of the simulation and the estimation improvement are then sent by the control means - via wireless communication means - to a remote server for further exploitation.
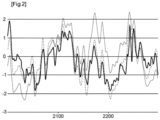
- FIG. 2 illustrates a graph showing three curves representing the dressing defects on a portion of the railway track.
- the ordinate axis of the graph represents the amplitude of the dressing defects while the abscissa axis represents the curvilinear abscissa on the portion of track studied.
- the first curve in thick solid line illustrates the actual dressing defects
- the second curve in thin solid line represents the first estimate of the dressing defects
- the third curve in dashed line represents the estimate improved by the simulation of the dressing defects. It can be seen that the implementation of the method provides an accurate estimate of the dressing defects, by the use of indirect determination methods.
- the system and the detection method of the invention make it possible to determine in a precise, reliable and reproducible manner all of the geometry defects of the railway track - longitudinal and transverse levelling defects, straightening defects and gauge defects - without requiring a complex and costly installation, and without requiring specific railway rolling stock.
- the detection method may include an additional step which aims to predict the evolution of the geometry of the railway track.
- control means exploit improved simulations of the railway track obtained at different times to determine the evolution of the geometry of the railway track over time. Then, by using a prediction model, for example a time series model, in particular an unsteady ARMA (autoregressive and moving average) model, the control means determine a prediction of the future evolution of the geometry of the railway track. This last step of the process makes it possible to predict maintenance slots for the railway track, which reinforces quality while controlling intervention costs.
- a prediction model for example a time series model, in particular an unsteady ARMA (autoregressive and moving average) model.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
Description
- L'invention s'inscrit dans le domaine ferroviaire et concerne plus précisément la surveillance des défauts géométriques des voies ferrées.
- L'invention porte plus particulièrement sur un procédé et un système de détection des défauts géométriques d'une voie ferrée, ces défauts étant l'expression d'une déformation indésirable de la voie ferrée.
- La géométrie des voies ferrées est un paramètre essentiel à la circulation ferroviaire. En effet, le nombre de défauts géométriques de la voie et surtout leur amplitude doivent être les plus faibles possibles pour permettre la circulation des trains en assurant le confort pour les passagers et en évitant les endommagements prématurés du matériel.
- Les défauts géométriques, représentés respectivement sur les
figures 1A à 1D , sont principalement de quatre types. Le premier (figure 1A ), l'écartement, correspond à une modification, par rapport à la distance nominale, de la distance entre les deux rails. Le deuxième (figure 1B ), le dressage, est un changement brutal de position des deux rails dans le plan de la voie sur une courte distance par rapport au tracé de la voie. Le troisième (figure 1C ), le nivellement transversal, également appelé gauche, est un affaissement ou un surélèvement de l'un des rails de la voie sur une courte distance. Enfin, le quatrième défaut (figure 1D ), le nivellement longitudinal, est un affaissement ou un surélèvement anormal des deux rails de la voie sur une courte distance (c'est à dire une distance de quelques dizaines de mètres). - Il est connu de mesurer directement le profil d'une voie ferrée à l'aide d'un dispositif de mesure embarqué sur un engin ferroviaire, le dispositif de mesure étant généralement un système optique du type télémètre à nappe laser. Le profil de chaque rail de la voie est ainsi obtenu, et par conséquent les éventuels défauts géométriques et leur position sur la voie sont détectés.
- Cependant, il est nécessaire d'utiliser un engin ferroviaire dédié à la réalisation de ces mesures, car l'installation du système optique de mesure demande d'effectuer au préalable des tests de calibration qui sont dépendants de l'engin ferroviaire. En outre, les moyens de mesure mis en oeuvre doivent être à la fois précis et robustes, car souvent installés en extérieur sous le plancher de l'engin (en vis-à-vis des rails). Enfin, l'engin ferroviaire dédié à la mesure doit nécessairement parcourir régulièrement l'ensemble des voies ce qui engendre une gêne pour la circulation commerciale des trains.
- Il est également connu de la publication
FR3062141 - Cependant, le système décrit dans cette publication n'est pas en mesure de détecter l'ensemble des défauts géométrique de la voie ferrée, et notamment les défauts d'écartement et de dressage, en particulier parce que la trajectoire latérale des essieux est différente de la position latérale des rails.
- L'invention vise ainsi à proposer un procédé permettant de détecter l'ensemble des défauts de géométrie de la voie ferrée et cela sans interférer avec la circulation commerciale des trains.
- L'invention vise également à proposer un système de détection des défauts de géométrie d'une voie ferrée ne nécessitant pas l'intégration d'instruments de mesure complexes et coûteux.
- À cet effet, le procédé de détection et de caractérisation des défauts de géométrie d'une voie ferrée comprenant deux rails opposés, mis en oeuvre par un système de détection installé sur un matériel roulant ferroviaire circulant sur ladite voie ferrée, lequel système comprend des moyens de mesures des accélérations verticales subies par ledit matériel roulant au niveau des deux rails et des moyens de commande reliés auxdits moyens de mesure d'accélération, caractérisé en ce qu'il comprend au moins les étapes successives de :
- Acquisition périodique d'une position géographique du matériel roulant circulant sur la voie ferrée, et de deux accélérations verticales subies par le matériel roulant au niveau de deux points de mesure opposés situés à un même niveau transversal ;
- Association pour chaque période d'acquisition, de la position géographique acquise avec les deux accélérations verticales correspondantes ;
- Détermination pour chaque position géographique acquise, d'un couple de deux flèches verticales calculées à partir des accélérations verticales considérées ;
- Comparaison entre les couples de flèches déterminés pour les positions géographiques acquises successives ;
- Détermination des défauts de nivellements longitudinaux et transversaux de la voie ferrée lorsque la différence entre deux couples de flèches consécutifs est supérieure à un seuil déterminée, et association de chaque défaut de nivellement longitudinal ou transversal avec la position géographique considérée ;
- Sélection dans une base de données de données relatives à une voie ferrée étalon, lesquelles données comprennent les défauts de nivellements longitudinaux et transversaux ainsi que les défauts de dressage et d'écartement de la voie ferrée étalon et les positions géographiques respectives desdits défauts de nivellements longitudinaux et transversaux, de dressage et d'écartement sur la voie étalon ;
- Caractérisation, à partir de la base de données sélectionnée, de la dépendance statistique entre les défauts de nivellements longitudinaux et transversaux d'une part et les défauts de dressage et d'écartement d'autre part de la voie étalon ;
- Application de la dépendance statistique par conditionnement aux défauts de nivellements longitudinaux et transversaux de la voie ferrée, et
- Estimation des défauts de dressage et d'écartement de la voie ferrée et de leurs positions géographiques respectives sur la voie ferrée.
- Le procédé de l'invention peut également comporter les caractéristiques optionnelles suivantes considérées isolément ou selon toutes les combinaisons techniques possibles :
- L'étape de détermination de la dépendance statistique est réalisée par un calcul de covariance entre les défauts de nivellements longitudinaux et transversaux d'une part et les défauts de dressage et d'écartement d'autre part de la voie étalon.
- Le matériel roulant comprenant des moyens de mesures des accélérations transversales subies par un essieu dudit matériel roulant circulant sur la voie ferrée, le procédé comprend une étape supplémentaire d'amélioration de l'estimation des défauts de dressage et d'écartement de la voie ferrée selon les sous-étapes suivantes :
- Acquisition d'au moins une accélération transversale subie par l'essieu du matériel roulant concomitamment à l'acquisition périodique de la position géographique du matériel roulant circulant sur la voie ferrée et des deux accélérations verticales ;
- Détermination des trajectoires latérales de l'essieu à partir des données d'accélérations transversales acquises ;
- Association de chaque position géographique et des deux accélérations verticales acquises avec l'accélération transversale correspondante ;
- Simulation du comportement du train pendant la circulation étudiée à partir de l'estimation des défauts de dressage et d'écartement de la voie ferrée et des défauts de nivellements longitudinaux et transversaux de la voie ferrée déterminés ;
- Optimisation de l'estimation des défauts de dressage et d'écartement de la voie ferrée par comparaison de ladite simulation avec les mesures d'accélération transversales ou des trajectoires latérales de l'essieu.
- L'étape de caractérisation de la dépendance statistique par conditionnement est également appliquée aux accélérations transversales ou aux trajectoires latérales de l'essieu.
- L'étape de détermination de la dépendance statistique est enrichie par un calcul de covariance entre les défauts de nivellements longitudinaux et transversaux d'une part et les accélérations transversales ou les trajectoires latérales de l'essieu d'autre part.
- L'étape d'optimisation met en oeuvre une fonction coût pour comparer la simulation du comportement dynamique du train aux mesures d'accélération transversales ou aux trajectoires latérales de l'essieu.
- Le procédé comprend une étape de prédiction de l'évolution de la géométrie de la voie ferrée à partir de la détermination des défauts de nivellements longitudinaux et transversaux et des estimations des défauts de dressage et d'écartement de la voie ferrée obtenus à différents instants.
- Le procédé comprend une étape de transmission des données de défauts de nivellements transversaux et longitudinaux, de dressage et d'écartement de la voie ferrée vers un serveur distant.
- L'invention vise également un système de détection et de caractérisation des défauts de géométrie d'une voie ferrée comprenant deux rails opposés, apte à être installé sur un matériel roulant ferroviaire et à mettre en oeuvre le procédé tel que décrit précédemment, lequel système comprend au moins des moyens configurés pour mesurer des accélérations verticales subies par ledit matériel roulant au niveau des deux rails opposés et des moyens de commande reliés auxdits moyens de mesure d'accélération verticale.
- Le système de détection et de caractérisation peut également comporter les caractéristiques optionnelles suivantes considérées isolément ou selon toutes les combinaisons techniques possibles :
- Le système comprend des moyens configurés pour mesurer des accélérations transversales subies par ledit matériel roulant et pour calculer les trajectoires latérales d'un essieu du matériel ferroviaire à partir desdites accélérations transversales.
- L'invention vise également un matériel roulant ferroviaire comprenant au moins une caisse s'étendant selon un axe longitudinal et au moins deux essieux et un système de détection et de caractérisation de défauts de géométrie d'une voie ferrée tel que décrit précédemment.
- Le matériel roulant peut également comporter les caractéristiques optionnelles suivantes considérées isolément ou selon toutes les combinaisons techniques possibles :
- Le système comprend au moins un accéléromètre transversal monté sur un essieu, et au moins deux accéléromètres verticaux respectivement montés sur deux boites d'essieu transversalement opposées.
- D'autres caractéristiques et avantages de l'invention ressortiront clairement de la description qui en est donnée ci-dessous, à titre indicatif et nullement limitatif, en référence aux figures annexées parmi lesquelles :
- [
Fig. 1A ] - [
Fig. 1B ] - [
Fig. 1C ] - [
Fig. 1D ] Lesfigures 1A à 1D représentent chacune un défaut particulier de géométrie de la voie ferrée ; - [
Fig. 2 ] Lafigure 2 représente un graphique illustrant des courbes représentant les défauts de dressage sur une portion de la voie ferrée. - Il est tout d'abord précisé que sur les figures, les mêmes références désignent les mêmes éléments quelle que soit la figure sur laquelle elles apparaissent et quelle que soit la forme de représentation de ces éléments. De même, si des éléments ne sont pas spécifiquement référencés sur l'une des figures, leurs références peuvent être aisément retrouvées en se reportant à une autre figure.
- Il est également précisé que les figures représentent essentiellement un mode de réalisation de l'objet de l'invention mais qu'il peut exister d'autres modes de réalisation qui répondent à la définition de l'invention.
- La présente invention concerne un procédé de détection des défauts de géométrie des voies ferrées. Ce procédé est mis en oeuvre par un système de détection simple et peu coûteux, qui est installé sur une rame commerciale.
- Le système de l'invention est prévu pour être installé sur un matériel roulant de type train commercial destiné au transport de voyageurs ou au fret. En d'autres termes, il n'est pas nécessaire d'utiliser un matériel roulant ferroviaire spécifiquement dédié à l'installation du système de détection, mais n'importe quel train commercial est utilisable. Non seulement cela évite l'occupation de la voie ferrée par des trains uniquement dédiés à des mesures en vue de l'entretien des voies, mais au surplus les mesures peuvent être réalisées sur un nombre important de voies, et la fréquence des mesures sur chaque voie est simplement limité par le nombre de trains commerciaux circulant sur la voie ferrée.
- Dans la suite de la description, on utilisera le terme train pour définir le matériel roulant ferroviaire, mais il va de soi que le système de l'invention peut être installé sur n'importe quel type de matériel roulant ferroviaire.
- Le train sur lequel est installé le système de détection de l'invention est mis en circulation sur une voie ferrée comprenant deux rails opposés et dont on veut connaitre la topographie et déterminer tous les défauts de géométrie - c'est-à-dire les défauts de nivellement longitudinaux et transversaux, de dressages et d'écartements. Le train, qui s'étend selon un axe longitudinal, comprend au moins une caisse et au moins deux essieux, chaque essieu comprenant deux boites d'essieu disposées au niveau de ses extrémités respectives. Typiquement, le train comprend plusieurs caisses et de fait plusieurs essieux.
- Selon l'invention, le système de détection comprend des moyens de mesure des accélérations subies par les différents éléments du train circulant sur la voie ferrée. Le système de détection comprend ainsi un accéléromètre vertical installé sur chaque boite d'essieux. Le système comprend donc au moins deux accéléromètres verticaux installés à distance l'un de l'autre selon une direction transversale : les deux accéléromètres verticaux sont donc à un même niveau transversal, pour permettre de mesurer deux accélérations verticales subies par le train au niveau des rails respectifs.
- Le système comprend également un accélérateur vertical installé sur chaque bogie du train, qui aident à la calibration des modèles utilisés pour affiner l'estimation des défauts de dressage et d'écartement.
- Le système comprend au moins un accéléromètre transversal installé sur un essieu dont les boites d'essieu sont elles-mêmes équipées d'accéléromètres verticaux. Par ailleurs le système peut comprendre un ou deux accéléromètres transversaux - ou latéraux - respectivement installés sur l'une des caisses du train et sur l'un des bogies.
- Le système de détection comprend également un dispositif de positionnement géographique du type GPS (pour « Global Positioning System »), des moyens de communication sans fil et des moyens de contrôle et de commande comprenant typiquement au moins un processeur et un espace mémoire, qui sont généralement intégrés dans les moyens de commande du train.
- Ainsi le système de l'invention, qui est prévu pour être installé sur le train, comprend au moins trois accéléromètres verticaux, trois accéléromètres transversaux, un dispositif de positionnement géographique, des moyens de communication sans fil et des moyens de contrôle et de commande.
- Le procédé de détection des défauts géométriques de la voie ferrée selon l'invention va maintenant être décrit.
- Le train est équipé du système de détection de l'invention et circule sur la voie ferrée dont on veut connaitre la topographie et plus particulièrement sur laquelle on veut détecter les défauts géométriques de nivellements longitudinaux et transversaux, de dressages et d'écartements.
- Au cours d'une première étape, les moyens de commande pilotent l'acquisition périodique de deux accélérations verticales subies par le train au niveau de deux points de mesure opposés situés à un même niveau transversal, d'une accélération transversale subie par le train et d'une position géographique du train. Les moyens de commande associent alors, pour chaque période d'acquisition, la position géographique acquise avec la valeur d'accélération transversale et le couple de valeurs d'accélérations verticales considérées.
- Au cours d'une deuxième étape, les moyens de commandes déterminent, pour chaque position géographique acquise, un couple de flèches verticales à partir des deux accélérations verticales considérées, par exemple avec un filtrage spatial. Le couple de flèches verticales ainsi déterminées correspond à un déplacement vertical du train au-dessus de chaque rail de la voie ferrée, sur un même niveau transversal.
- Au cours d'une troisième étape, les moyens de commande comparent ensuite les couples de flèches verticales successifs. Autrement dit, chaque couple de flèches déterminé à partir d'accélérations verticales acquises à une période déterminée est comparée avec le couple de flèches déterminé à partir des accélérations verticales acquises à la période qui suit immédiatement. Si la différence deux à deux entre les flèches des couples successifs est supérieure à un seuil déterminé, alors les moyens de commande identifient la présence d'un défaut de nivellement et l'associent à la position géographique considérée. Par ailleurs, si le dépassement du seuil ne concerne que l'une des deux flèches verticales du couple, alors les moyens de commande identifient un défaut de nivellement transversal, tandis que si le dépassement de seuil concerne les deux flèches verticales du couple, alors les moyens de commande identifient un défaut de nivellement longitudinal.
- Au cours d'une quatrième étape, les moyens de commande sélectionnent dans une base de données, enregistrée dans l'espace mémoire desdits moyens de commande, des données correspondant à une ou des voie(s) ferrée(s) étalon similaire à la voie ferrée étudiée sur laquelle circule le train. Par similaire, on entend une voie ferrée étalon dont les vitesses de circulation recommandées, le tonnage et le type de trains circulant sur cette voie ferrée étalon sont équivalents à ceux de la voie ferrée étudiée. La base de données comprend la topographie de cette voie étalon ainsi qu'une liste de tous les défauts de géométrie - nivellements longitudinaux et transversaux, dressages et écartements - et leurs positions géographiques respectives. La base de données comprend également des données d'accélérations transversales et des trajectoires latérales d'essieux de matériaux roulants ferroviaires connus circulant sur cette voie étalon. On entend par trajectoires latérales de l'essieu la composante transversale de déplacement de l'essieu. Dans la suite de la description, on utilisera simplement l'expression « trajectoire de l'essieu » pour définir la trajectoire latérale dudit essieu.
- Il existe une dépendance statistique entre d'une part les défauts de nivellements longitudinaux et transversaux et d'autre part les défauts d'écartements et de dressages. En particulier, cette dépendance statistique peut être déterminée par un calcul de covariance.
- Aussi, au cours de la cinquième étape, la dépendance statistique entre les différents défauts géométriques de la voie ferrée étalon est déterminée par un calcul de covariance entre une première série de variables correspondant aux défauts de nivellements longitudinaux et transversaux de la voie étalon et une seconde série de variables correspondant aux défauts de dressages et d'écartements de la voie ferrée étalon.
- Cette dépendance statistique est alors appliquée, au cours d'une sixième étape, aux défauts verticaux de la voie ferrée précédemment déterminés sur laquelle circule le train équipé du système de détection de défauts géométriques. Les moyens de commande en déduisent alors une estimation des défauts de dressages et d'écartements de la voie ferrée, ainsi que leurs positions géographiques respectives.
- De manière avantageuse, les quatrième et cinquième étapes sont complétées par la dépendance statistique avec les accélérations transversales ou les trajectoires associées de l'essieu déterminées par double intégration des accélérations transversales qui seraient, dans l'étape de construction des dépendances statistiques, mesurées par le système de détection et de caractérisation de défauts de la voie ferrée, ou simulées sur la voie étalon. Ces dépendances enrichies sont appliquées pour estimer les défauts de dressage et d'écartement par conditionnement.
- Les méthodes de conditionnement sont des méthodes d'analyse bien connues de l'homme du métier - par exemple le conditionnement gaussien - au cours de laquelle est mesurée la dépendance de la solution d'un problème (ici les défauts de dressage et d'écartement de la voie ferrée) par rapport aux données dudit problème (ici les défauts de nivellement longitudinaux et transversaux de la voie ferrée).
- Au cours d'une septième étape, les moyens de commande améliorent l'estimation des défauts de dressages et d'écartements de la voie ferrée en utilisant les mesures d'accélérations transversales par les accéléromètres transversaux considérés.
- Au cours d'une première sous étape, les moyens de commande réalisent une simulation du comportement dynamique du train sur les défauts verticaux, de dressages et d'écartements de la voie ferrée estimés précédemment, par exemple à l'aide d'un modèle de dynamique ferroviaire - par exemple un code de dynamique ferroviaire par corps rigide - qui utilise comme données d'entrée l'estimation des défauts géométriques de la voie ferrée réalisée à l'étape précédente, et également les défauts de nivellements longitudinaux et transversaux déterminés à la troisième étape, le tracé de la voie ferrée, la vitesse de circulation du train et les caractéristiques mécaniques du train. Concernant le « comportement dynamique du train » sur la voie, ce dernier correspond aux accélérations que le train subit, aux efforts que le train transmet à la voie, et aux efforts qui transitent dans les différentes suspensions du train.
- Les données de sortie du modèle de dynamique ferroviaire forment un ensemble d'accélérations ou de trajectoires d'essieu. Ces dernières permettront l'estimation des défauts de dressages et d'écartements de la voie ferrée en résolvant le problème inverse associé.
- Au cours d'une seconde sous-étape, les données issues de la simulation sont comparées avec les mesures effectuées par les accéléromètres transversaux et les trajectoires de l'essieu associées déterminées par intégration. Une boucle d'optimisation via une fonction de perte - ou de coût - est alors mise en oeuvre par les moyens de commande pour rapprocher la simulation des mesures d'accélération transversales précédemment acquises et / ou des trajectoires de l'essieu associées. Avantageusement, l'optimisation sera réalisée avec des algorithmes génétiques, connus pour fournir une solution approchée à ce type de problème d'optimisation en un temps raisonnable.
- Les résultats de la simulation et de l'amélioration de l'estimation sont alors envoyés par les moyens de commande - via les moyens de communication sans fil - vers un serveur distant pour une exploitation ultérieure.
- La
figure 2 illustre un graphique illustrant trois courbes représentant les défauts de dressages sur une portion de la voie ferrée. L'axe des ordonnées du graphique représente l'amplitude des défauts de dressages tandis que l'axe des abscisses représente l'abscisse curviligne sur la portion de voie étudiée. - La première courbe en trait plein épais illustre les défauts réels de dressages, la seconde courbe en trait plein fin représente la première estimation des défauts de dressages, et la troisième courbe en trait discontinu représente l'estimation améliorée par la simulation des défauts de dressages. On voit que la mise en oeuvre du procédé fournit une estimation précise des défauts de dressages, par l'utilisation de méthodes de détermination indirectes.
- Ainsi, le système et le procédé de détection de l'invention permettent de déterminer de manière précise, fiable et reproductible l'ensemble des défauts de géométrie de la voie ferrée - défauts de nivellement longitudinaux et transversaux, de dressages et d'écartements - sans nécessiter une installation complexe et coûteuse, et sans nécessiter de matériel roulant ferroviaire spécifique.
- Enfin, le procédé de détection peut comprendre une étape supplémentaire qui vise à prédire l'évolution de la géométrie de la voie ferrée.
- En effet, les moyens de commande exploitent des simulations améliorées de la voie ferrée obtenues à différents instants pour déterminer l'évolution de la géométrie de la voie ferrée dans le temps. Puis, en utilisant un modèle de prédiction, par exemple un modèle de séries temporelles, notamment un modèle ARMA (autorégressifs et moyenne mobile) instationnaire, les moyens de commande déterminent une prédiction de l'évolution à venir de la géométrie de la voie ferrée. Cette dernière étape du procédé permet de prévoir des créneaux de maintenance de la voie ferrée, ce qui renforce la qualité tout en maitrisant les couts d'intervention.
Claims (12)
- Procédé de détection et de caractérisation de défauts de géométrie d'une voie ferrée comprenant deux rails opposés, mis en oeuvre par un système de détection installé sur un matériel roulant ferroviaire circulant sur ladite voie ferrée, lequel système comprend des moyens de mesures des accélérations verticales subies par ledit matériel roulant au niveau des deux rails et des moyens de commande reliés auxdits moyens de mesure d'accélération, caractérisé en ce qu'il comprend au moins les étapes successives de :• Acquisition périodique d'une position géographique du matériel roulant circulant sur la voie ferrée, et de deux accélérations verticales subies par le matériel roulant au niveau de deux points de mesure opposés situés à un même niveau transversal ;• Association, pour chaque période d'acquisition, de la position géographique acquise avec les deux accélérations verticales correspondantes ;• Détermination, pour chaque position géographique acquise, d'un couple de deux flèches verticales calculées à partir des accélérations verticales considérées ;• Comparaison entre les couples de flèches déterminés pour les positions géographiques acquises successives ;• Détermination des défauts de nivellements longitudinaux et transversaux de la voie ferrée lorsque la différence entre deux couples de flèches consécutifs est supérieure à un seuil déterminé, et association de chaque défaut de nivellement longitudinal ou transversal avec la position géographique considérée ;• Sélection dans une base de données de données relatives à une voie ferrée étalon, lesquelles données comprennent les défauts de nivellements longitudinaux et transversaux ainsi que les défauts de dressage et d'écartement de la voie ferrée étalon et les positions géographiques respectives desdits défauts de nivellements longitudinaux et transversaux, de dressage et d'écartement sur la voie étalon ;• Caractérisation, à partir de la base de données sélectionnée, de la dépendance statistique entre une première série de variables correspondant aux défauts de nivellements longitudinaux et transversaux, et une seconde série de variables correspondant aux défauts de dressage et d'écartement de la voie étalon ;• Application de la dépendance statistique par conditionnement aux défauts de nivellements longitudinaux et transversaux de la voie ferrée, et• Estimation des défauts de dressage et d'écartement de la voie ferrée et de leurs positions géographiques respectives sur la voie ferrée.
- Procédé de détection selon la revendication précédente, caractérisé en ce que l'étape de caractérisation de la dépendance statistique est réalisée par un calcul de covariance entre les défauts de nivellements longitudinaux et transversaux d'une part et les défauts de dressage et d'écartement d'autre part de la voie étalon.
- Procédé selon la revendication 1 ou 2, dans lequel le matériel roulant comprend des moyens de mesures des accélérations transversales subies par un essieu dudit matériel roulant circulant sur la voie ferrée, caractérisé en ce que le procédé comprend une étape supplémentaire d'amélioration de l'estimation des défauts de dressage et d'écartement de la voie ferrée selon les sous-étapes suivantes :• Acquisition d'au moins une accélération transversale subie par l'essieu du matériel roulant concomitamment à l'acquisition périodique de la position géographique du matériel roulant circulant sur la voie ferrée et des deux accélérations verticales ;• Détermination des trajectoires latérales de l'essieu à partir des données d'accélérations transversales acquises ;• Association de chaque position géographique et des deux accélérations verticales acquises avec l'accélération transversale correspondante ;• Simulation du comportement dynamique du train à partir de l'estimation des défauts de dressage et d'écartement de la voie ferrée et des défauts de nivellements longitudinaux et transversaux de la voie ferrée déterminés ;• Optimisation de l'estimation des défauts de dressage et d'écartement de la voie ferrée par comparaison de ladite simulation avec les mesures d'accélération transversales ou des trajectoires latérales de l'essieu.
- Procédé selon la revendication précédente, caractérisé en ce que l'étape de caractérisation de la dépendance statistique par conditionnement est également appliquée aux accélérations transversales ou aux trajectoires latérales de l'essieu.
- Procédé selon les revendications 2 et 3 ou selon les revendications 2 à 4, caractérisé en ce que l'étape de détermination de la dépendance statistique est enrichie par un calcul de covariance entre les défauts de nivellements longitudinaux et transversaux d'une part et les accélérations transversales ou les trajectoires latérales de l'essieu d'autre part.
- Procédé selon l'une quelconque des revendications 3 à 6, caractérisé en ce que l'étape d'optimisation met en oeuvre une fonction de coût pour comparer la simulation du comportement dynamique du train aux mesures d'accélération transversales ou aux trajectoires latérales de l'essieu.
- Procédé selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comprend une étape de prédiction de l'évolution de la géométrie de la voie ferrée à partir de la détermination des défauts de nivellements longitudinaux et transversaux et des estimations des défauts de dressage et d'écartement de la voie ferrée obtenus à différents instants.
- Procédé selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comprend une étape de transmission des données de défauts de nivellements transversaux et longitudinaux, de dressage et d'écartement de la voie ferrée vers un serveur distant.
- Système de détection et de caractérisation des défauts de géométrie d'une voie ferrée comprenant deux rails opposés, apte à être installé sur un matériel roulant ferroviaire et à mettre en oeuvre le procédé selon l'une quelconque des revendication précédentes, caractérisé en ce qu'il comprend au moins des moyens configurés pour mesurer des accélérations verticales subies par ledit matériel roulant au niveau des deux rails opposés et des moyens de commande reliés auxdits moyens de mesure d'accélération verticale.
- Système selon la revendication précédente, caractérisé en ce qu'il comprend des moyens configurés pour mesurer des accélérations transversales subies par ledit matériel roulant et pour calculer les trajectoires latérales d'un essieu du matériel ferroviaire à partir desdites accélérations transversales.
- Matériel roulant ferroviaire comprenant au moins une caisse s'étendant selon un axe longitudinal et au moins deux essieux, caractérisé en ce qu'il comprend un système de détection et de caractérisation de défauts de géométrie d'une voie ferrée selon la revendication 9 ou 10.
- Matériel selon la revendication précédente, caractérisé en ce que le système comprend au moins un accéléromètre transversal monté sur un essieu, et au moins deux accéléromètres verticaux respectivement montés sur deux boites d'essieu transversalement opposées.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR2302346A FR3146644B1 (fr) | 2023-03-14 | 2023-03-14 | Procédé et système de détection et de caractérisation de défauts géométriques d’une voie ferrée. |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4434847A1 true EP4434847A1 (fr) | 2024-09-25 |
Family
ID=86604616
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24163258.7A Pending EP4434847A1 (fr) | 2023-03-14 | 2024-03-13 | Procédé et système de détection et de caractérisation de défauts géométriques d'une voie ferrée |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4434847A1 (fr) |
| FR (1) | FR3146644B1 (fr) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3351452A1 (fr) * | 2017-01-23 | 2018-07-25 | Sncf Reseau | Procédé et installation d'analyse automatique de l'évolution de la géométrie de voies de circulation |
-
2023
- 2023-03-14 FR FR2302346A patent/FR3146644B1/fr active Active
-
2024
- 2024-03-13 EP EP24163258.7A patent/EP4434847A1/fr active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3351452A1 (fr) * | 2017-01-23 | 2018-07-25 | Sncf Reseau | Procédé et installation d'analyse automatique de l'évolution de la géométrie de voies de circulation |
| FR3062141A1 (fr) | 2017-01-23 | 2018-07-27 | Sncf Reseau | Procede et installation d'analyse automatique de l'evolution de la geometrie de voies de circulation |
Non-Patent Citations (1)
| Title |
|---|
| LASISI AHMED ET AL: "Rail Track Quality and T-Stochastic Neighbor Embedding for Hybrid Track Index", 2019 IEEE INTERNATIONAL CONFERENCE ON BIG DATA (BIG DATA), IEEE, 9 December 2019 (2019-12-09), pages 1470 - 1477, XP033721404, DOI: 10.1109/BIGDATA47090.2019.9006236 * |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3146644A1 (fr) | 2024-09-20 |
| FR3146644B1 (fr) | 2025-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009541833A (ja) | 車両の回転限界を判断する方法 | |
| CN114274972A (zh) | 自主驾驶环境中的场景识别 | |
| Raffone | Road slope and vehicle mass estimation for light commercial vehicle using linear Kalman filter and RLS with forgetting factor integrated approach | |
| EP3351452B1 (fr) | Procédé et installation d'analyse automatique de l'évolution de la géométrie de voies de circulation | |
| EP4153465A1 (fr) | Procédé de calcul d'un vecteur de vitesse instantanée d'un véhicule ferroviaire, système correspondant | |
| EP4028299B1 (fr) | Détection de défauts liés à des roues d'un véhicule automobile en situation de roulage | |
| AU2023416254A1 (en) | Method for determining an indicator of structural defectiveness | |
| US12125289B2 (en) | Method for evaluating a minimum braking distance of a vehicle and vehicle | |
| FR3054035A1 (fr) | Procede de mesure de la pression de gonflage des pneumatiques equipant un vehicule en deplacement sur une voie de circulation | |
| EP4434847A1 (fr) | Procédé et système de détection et de caractérisation de défauts géométriques d'une voie ferrée | |
| EP3205548B1 (fr) | Procédé d'optimisation du confort dans un véhicule ferroviaire | |
| EP2293015A1 (fr) | Procédé de correction d'odométrie férroviaire | |
| EP2293039A1 (fr) | Procédé de controle du comportement dynamique d'un véhicule ferroviaire | |
| FR3144662A1 (fr) | Procédé de détermination d’un indicateur de défaut structurel | |
| EP3328668B1 (fr) | Dispositif pour estimer un indicateur d'état d'une voie de circulation empruntée par un véhicule terrestre | |
| EP4343287B1 (fr) | Procédé et système de détermination de la masse d'un véhicule | |
| Nagy et al. | Development of machine learning assisted suspension vibration data-based road quality classification system | |
| EP3493153A1 (fr) | Procédé et système de détection des défauts de géométrie d'une voie ferrée | |
| FR3108173A1 (fr) | Système de contrôle d'une force de contact entre une roue et un rail | |
| Mizrachi et al. | Road surface characterization using crowdsourcing vehicles | |
| RU2273013C1 (ru) | Способ исследования динамики железнодорожного подвижного транспортного средства | |
| Jensen et al. | Mass estimation of passenger cars using longitudinal dynamics without considering vehicle can-bus data | |
| EP2893308B1 (fr) | Procédé de détermination de la masse d'un véhicule et véhicule correspondant | |
| WO2015086949A1 (fr) | Dispositif et procédé d'estimation de la masse totale d'un véhicule automobile a étalonnage embarque de capteurs de débattement des suspensions | |
| Araya Reyes et al. | A comprehensive data-driven approach to estimate track longitudinal level from inertial measurements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: APP_65586/2024 Effective date: 20241212 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20250321 |