EP4477797A1 - Accessoire pour un dispositif de vissage et/ou de dévissage pour attache de voie ferrée - Google Patents
Accessoire pour un dispositif de vissage et/ou de dévissage pour attache de voie ferrée Download PDFInfo
- Publication number
- EP4477797A1 EP4477797A1 EP24181780.8A EP24181780A EP4477797A1 EP 4477797 A1 EP4477797 A1 EP 4477797A1 EP 24181780 A EP24181780 A EP 24181780A EP 4477797 A1 EP4477797 A1 EP 4477797A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- screwing
- accessory
- unscrewing
- unscrewing device
- supporting structure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B29/00—Laying, rebuilding, or taking-up tracks; Tools or machines therefor
- E01B29/24—Fixing or removing detachable fastening means or accessories thereof; Pre-assembling track components by detachable fastening means
- E01B29/28—Fixing or removing detachable fastening means or accessories thereof; Pre-assembling track components by detachable fastening means the fastening means being of screw-and-nut type; Apparatus therefor, adapted to additionally drilling holes
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B29/00—Laying, rebuilding, or taking-up tracks; Tools or machines therefor
- E01B29/24—Fixing or removing detachable fastening means or accessories thereof; Pre-assembling track components by detachable fastening means
- E01B29/28—Fixing or removing detachable fastening means or accessories thereof; Pre-assembling track components by detachable fastening means the fastening means being of screw-and-nut type; Apparatus therefor, adapted to additionally drilling holes
- E01B29/29—Fixing or removing detachable fastening means or accessories thereof; Pre-assembling track components by detachable fastening means the fastening means being of screw-and-nut type; Apparatus therefor, adapted to additionally drilling holes for horizontally-arranged fastening elements, e.g. fish-bolts
Definitions
- the technical field of the invention relates to the screwing and/or unscrewing of a railway track fastener(s). More particularly, the invention relates to an accessory for a screwing and/or unscrewing device for a railway track fastener.
- a railway track typically comprises two rails connected together by sleepers staggered along the length of the rails.
- the rails are fixed to the sleepers via fasteners.
- Each of the two rails may be formed of a plurality of rail portions fixed together, two consecutive rail portions may be fixed together via a fishplate and fasteners fixing the fishplate to said two rail portions.
- the fasteners may be screwed and/or unscrewed using a screwing and/or unscrewing device, for example an impact wrench, operated by an operator.
- a screwing and/or unscrewing device for example an impact wrench
- the vibrations from such a screwing and/or unscrewing device are harmful to the operator and may cause musculoskeletal disorders in the latter.
- the object of the present invention is to improve the use of a screwing and/or unscrewing device for a railway track fastener, in particular to improve the safety of an operator.
- the accessory may further include one or more of the following features.
- the coupling system comprises a clamping flange configured to, in the assembled configuration, grip the screwing and/or unscrewing device.
- the coupling system comprises a clamping device, distinct from the clamping flange, configured to, in the assembled configuration, grip the screwing and/or unscrewing device.
- the coupling system is configured so as to ensure a first vibration decoupling at a region receiving the screwing and/or unscrewing device within the clamping flange and a second vibration decoupling between the clamping flange and the supporting structure.
- the coupling system comprises at least one damping member configured to oppose, in the assembled configuration, the transmission of vibrations between the screwing and/or unscrewing device and the supporting structure.
- the coupling system comprises a plurality of damping members.
- the clamping device comprises two parts configured to be stressed, in a closed configuration of the clamping device, one towards the other so as to locally grip, in the assembled configuration, the screwing and/or unscrewing device, one of said two parts being fixed to the supporting structure at least by means of at least one of the damping members of the plurality of damping members.
- the indexing mechanism comprises a return member configured to vary the indexing mechanism automatically from its second configuration to its first configuration when the relative positioning between the handling interface and the supporting structure corresponds to any one of the predefined relative positions.
- the assembly may include a trolley, the trolley including a rolling system for rolling on the rails of the railway track to be maintained and an articulated arm at the end of which the accessory is mounted.
- a fastener may comprise a head, for example hexagonal, and an at least partially threaded body extending from the head.
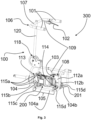
- a screwing and/or unscrewing device 200 for a railway track fastener comprises a gripping member 201 and a control actuator 202 for controlling a function of the screwing and/or unscrewing device 200.
- An exemplary embodiment of the screwing and/or unscrewing device 200 is illustrated in figure 1 .
- the function may be the rotation of a motor 203 of the screwing and/or unscrewing device 200.
- a motor 203 of the screwing and/or unscrewing device 200 For example, when an operator presses on the control actuator 202 this makes it possible to ensure the rotation of a shaft 204, coupled to the motor 203, at one end 204a of which a socket (not shown and also called a key) having a shape allowing it to receive the head of the fastener to be screwed or unscrewed, or an extension, can be mounted for example via a ball device 210 arranged at the end 204a to allow rapid assembly/disassembly of the socket or the extension.
- the end 204a is opposite the motor 203.
- the screwing and/or unscrewing device 200 comprises the ball device 210.
- the gripping member 201 adopts in particular the form of a handle configured to be grasped by hand by the operator.
- the gripping member 201 is intended to be grasped by the operator who can then manually hold the screwing and/or unscrewing device 200 via this gripping member 201.
- the control actuator 202 may be formed by a trigger provided with a switch.
- a trigger provided with a switch.
- first, second and third powers make it possible to adapt the operation of the screwing and/or unscrewing device 200, for example, depending on the torque encountered during screwing.
- the torque of the motor 203 will be high in order to loosen the fastener properly, in particular if the latter is seized.
- the transition of the motor 203 from a screwing configuration to a screwing configuration can be done by phase inversion controlled by the selector 205.
- the screwing and/or unscrewing device 200 may be powered by one or more batteries 206 ( figure 1 ) removably mounted to the rest of the screwing and/or unscrewing device 200.
- This example is not limiting in the sense that the screwing and/or unscrewing device 200 could use another energy source such as a cable power supply or a fossil fuel to activate (i.e. rotate) its motor 203 so as to drive the rotation of the shaft 204.
- the screwing and/or unscrewing device 200 comprises an impact mechanism 207.
- the impact mechanism 207 may be a striking mechanism (in this case the screwing and/or unscrewing device 200 is also called an impact driver) or a percussion mechanism (in this case the screwing and/or unscrewing device 200 is also called an impact wrench).
- the screwing and/or unscrewing device 200 may also comprise a part 208 connecting the motor 203 and the shock mechanism 207.
- the invention relates to an accessory 100 for the screwing and/or unscrewing device 200.
- Figures 2 to 8 illustrate in particular a particular embodiment of this accessory 100 according to different configurations of use which will be detailed below.
- the accessory 100 comprises a handling handle 101, a control member 102, a coupling device 103, a supporting structure 104 secured to the handling handle 101 and the control member 102; a coupling system 105 configured to allow the screwing and/or unscrewing device 200 to be assembled in a removable manner to the supporting structure 104 and to ensure, in an assembled configuration of the screwing and/or unscrewing device 200 to the supporting structure 104, vibration decoupling between the handling handle 101 and the gripping member 201.
- the assembled configuration i.e. obtained when the accessory 100 and the screwing and/or unscrewing device 200 are assembled, is for example visible in figures 3 , 4 , 7 And 8 .
- the coupling device 103 is connected to the control member 102 and is configured to be connected to the screwing and/or unscrewing device 200 in order to propagate an actuation of the control member 102 to the screwing and/or unscrewing device 200, in particular in the assembled configuration.
- the coupling device 103 is connected to the control member 102 and is configured to be connected to the screwing and/or unscrewing device 200 so that the actuation of the control member 102 makes it possible to control the function of the screwing and/or unscrewing device 200 from the accessory 100.
- the accessory 100 makes it possible to limit the vibrations perceived by the operator when using the screwing and/or unscrewing device 200 from this accessory 100, the accessory 100 also makes it possible to relocate the control of the screwing and/or unscrewing device 200 to the level of the accessory 100.
- the operator no longer needs to interact directly with the screwing and/or unscrewing device 200 to actuate the control actuator 202 when the accessory 100 and the screwing and/or unscrewing device 200 are assembled (i.e. in the assembled configuration).
- the function can be controlled, in the assembled configuration, directly from the accessory 100 by actuation of the control member 102, without this actuation subjecting the operator to the vibrations to which he would have been subjected by manual actuation directly on the control actuator 202.
- the coupling system 105 is also configured to ensure, in the assembled configuration, vibration decoupling between the control member 102 and the control actuator 202.
- the accessory 100 as such can be considered in isolation, i.e. when the screwing and/or unscrewing device 200 and the accessory 100 are disjoint. Therefore, the reference to the assembled configuration when speaking of the accessory 100 makes it possible to define the accessory 100 according to its cooperation with the screwing and/or unscrewing device 200; the coupling system 105 being intended to ensure vibration decoupling in the assembled configuration.
- the handling handle 101 allows the operator to manually manipulate the accessory 100.
- the control member 102 can adopt the form of a handle of the type capable of varying between a rest position towards which it is constantly urged and an actuation position obtained by the operator pressing on said handle.
- the invention also relates to an assembly 300 comprising the screwing and/or unscrewing device 200 and the accessory 100.
- the assembly 300 is in the assembled configuration (i.e. the assembly 300 comprises the assembled configuration) in which the screwing and/or unscrewing device 200 and the supporting structure 104 are assembled by (i.e. via) the coupling system 105 which ensures vibration decoupling between the handling handle 101 and the gripping member 201.
- the coupling system 105 ensures vibration decoupling between the supporting structure 104 and the screwing and/or unscrewing device 200.
- the coupling device 103 is connected to the screwing and/or unscrewing device 200 in order, where appropriate, to propagate the actuation of the control member 102 to the screwing and/or unscrewing device 200.
- the assembly 300 is visible in figures 3 , 4 , 7 And 8 .
- the 300 assembly may be a maintenance device for railway track.
- the screwing and/or unscrewing device 200 is the one visible in figure 1 .
- Coupled system 105 configured to allow the screwing and/or unscrewing device 200 to be assembled in a removable manner to the supporting structure 104
- assembly and disassembly can be carried out with or without the use of tools.
- the accessory 100 may comprise two handling handles 101 as visible in the Figures 2 to 5 And 7 to 8 , this makes it easier for the operator to handle the accessory 100.
- the accessory 100 comprises a handling interface 106 comprising the control member 102 and the handling handle(s) 101.
- the manipulation interface 106 comprises an orientation member 107, such as a handlebar, or handlebar.
- the manipulation handles 101 are mounted at the opposite longitudinal ends of the orientation member 107.
- the control member 102 is then mounted on the orientation member 107 at one of the manipulation handles 101 (the right handle at Figures 2 to 5 And 7 to 8 ).
- the handling interface 106 and more particularly the orientation member 107, can be connected to the supporting structure 104 at least by means of an elongated element 120 such as an upright.
- the orientation member 107 can then be fixed to the elongated element 120 which can adopt the form of a bracket.
- the vibration decoupling provided by the coupling system 105 in the assembled configuration, corresponds to a vibration decoupling between the screwing and/or unscrewing device 200 and a part of the accessory 100 comprising the supporting structure 104, the handling interface 106, and where appropriate the elongated element 120.
- the transfer of the control of the function to the accessory 100 by the control member 102 requires the presence of the coupling device 103 in order to propagate the actuation of the control member 102 to activate the function when the coupling device 103 is connected to the screwing and/or unscrewing device 200.
- the concept of propagation is to be taken in the broad sense in the sense that it can be implemented by any means making it possible to ensure, when the coupling device 103 is connected to the screwing and/or unscrewing device 200 and in particular in the assembled configuration, an activation of the function by actuation of the control member 102.
- the coupling device 103 is configured to, when said coupling device 103 is connected to the screwing and/or unscrewing device 200, mechanically propagate the actuation of the control member 102 to the control actuator 202.
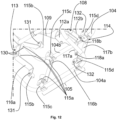
- the coupling device 103 may comprise a cable 109 ( figures 2 , 3 , 5 , 6 , 7 , And 9 to 14 ), in particular metallic, mechanically connected to the control member 102 and to an actuating device 108.
- the coupling device 103 comprises this actuating device 108.
- the actuating device 108 may comprise an adapter, for example formed by two shells 112a, 112b shaped to be mounted on the screwing and/or unscrewing device 200 and thus ensure suitable maintenance of the actuating device 108 at the control actuator 202.
- This adapter may be configured to be mounted on the screwing and/or unscrewing device 200 in a removable manner with or without the use of tools.
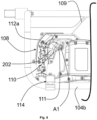
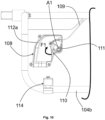
- THE figures 9 And 10 are centered on the actuation device 108 according to a particular implementation of the first embodiment relating to the propagation by the coupling device 103 and for which the shell 112b has been removed in order to visualize inside the actuating device 108.
- the actuation device 108 may comprise a support member 110 such that the actuation of the control member 102 induces, via the cable 109 fixed to this support member 110 and to the control member 102, a movement of the support member 110, for example around an axis A1 of rotation, allowing the support member 110 to locally exert a force on the control actuator 202. For example, this force reproduces the manual actuation of the control actuator 202 by the operator.
- the figures 9 And 10 illustrate the support member 110 in a rest configuration, in which it does not actuate the control actuator 202, which it presents when the actuating member 102 is not actuated by the operator.
- the actuating member 102 is actuated, i.e. an actuating force is exerted by the operator on the actuating member 102, the cable 109 can be pulled by the control member 102, resulting in rotation of the support member 110 around the axis A1 of rotation in the direction of the arrow F1 of the figure 10 .
- this rotation according to the arrow F1 allows, in figure 9 , to actuate the control actuator 202 when the actuating device 108 is mounted on the screwing and/or unscrewing device 200.
- the actuation device 108 may comprise a return member 111, such as a spring, constantly urging the support member 110 towards its rest configuration.
- a return member 111 such as a spring
- the return member 111 is a torsion spring engaged on the axis A1 of rotation and having two ends, one bearing against one of the two shells 112a, 112b and the other bearing on the support member 110 (see for example the figures 9 And 10 ).
- This first embodiment has the advantage of simplicity of implementation but also the advantage of preserving the sealing of the screwing and/or unscrewing device 200 in the sense that there is no need to modify this screwing and/or unscrewing device 200 since the coupling device 103 replaces, when appropriate (when the aforementioned actuation force is implemented) and when the coupling device 103 is connected to the screwing and/or unscrewing device 200, the manual actuation of the operator on the control actuator 202.
- the coupling device 103 is configured to, when said coupling device 103 is connected to the screwing and/or unscrewing device 200, authorize propagation of an electrical actuation signal, during actuation of the member. 102 control, directly to the screwing and/or unscrewing device 200.
- an electrical cable of the coupling device 103 can be electrically connected to the control member 102 and to a connector belonging to the screwing and/or unscrewing device 200.
- the actuation of the control member 102 allows the propagation of the electrical actuation signal in the electrical cable and following this propagation, the screwing and/or unscrewing device 200 receives the electrical actuation signal from which results an actuation of the function in an appropriate manner.
- the electrical actuation signal is continuously generated by the screwing and/or unscrewing device 200 to be propagated on a circuit comprising the connector, the electrical cable and a component of the actuation member 102.
- This circuit has an open state when the actuation member 102 is not actuated and a closed state when the actuation member 102 is actuated.
- the component may be a potentiometer or a switch which, when the actuation member 102 is actuated, changes the circuit from the open state to the closed state so as to allow the propagation of the electrical actuation signal in the circuit which results in the actuation of the function.
- the electric cable may comprise two electrical conductors connected in series with the interposition of the component and each electrically connected to the connector when the coupling device 103 is connected to the screwing and/or unscrewing device 200.
- the coupling device 103 is configured to, when said coupling device 103 is connected to the screwing and/or unscrewing device 200, propagate, during the actuation of the control member 102, an electrical actuation signal generated by the accessory 100 (in particular by the control member 102) to an actuation device 108 configured to ensure mechanical actuation of the control actuator 202 following the reception of the electrical control signal by the actuation device 108, the coupling device 103 comprising the actuation device 108.
- the cable 109 may be electric and the actuation device 108 may house means configured to control a motor of the actuation device 108 in order to move a support member of the actuation device 108 so that it exerts a suitable force on the control actuator 202 upon receipt of the electrical actuation signal by said means configured to control the motor.
- the accessory 100 (in particular the control member 102) can generate an electrical release signal which is transmitted to the device 108. actuation via the cable 109 when stopping the actuation of the control member 102 so that the means configured to control the motor move the support member so that the actuation of the control actuator 202 by the support member ceases.
- control member 102 may comprise a switch or a potentiometer connected to the electrical cable.
- the coupling device 103 is configured to, when said coupling device 103 is connected to the screwing and/or unscrewing device 200, propagate a radioelectric actuation signal generated by the accessory 100 (in particular by the control member 102), when the control member 102 is actuated, directly to the screwing and/or unscrewing device 200.
- the actuating member 102 may comprise a transmitter configured to transmit said actuating radio signal, for example following the activation of a switch or a potentiometer of the control member 102, and the screwing and/or unscrewing device 200 may comprise a receiver configured to receive said actuating radio signal and means for actuating the function upon receipt of said actuating radio signal.
- the accessory 100 (in particular the control member 102) can generate an electrical release signal which is transmitted to the screwing and/or unscrewing device 200 when the actuation of the control member 102 is stopped so that the screwing and/or unscrewing device 200 stops the function.
- the transmitter can be configured to transmit said radioelectric release signal when the actuation of the control member 102 is stopped
- the receiver can be configured to receive said radioelectric release signal
- the screwing and/or unscrewing device 200 can comprise means for stopping the function when said radioelectric release signal is received by the receiver.
- the coupling device 103 is configured to propagate, when said coupling device 103 is connected to the screwing and/or unscrewing device 200, a radioelectric actuation signal generated by the accessory 100 (in particular by the control member 102), during the actuation of the control member 102, to an actuation device configured to ensure mechanical actuation of the control actuator 202 following the reception of the radioelectric actuation signal by the actuation device, the coupling device 103 comprising the actuation device 108.
- the actuating member 102 may comprise a transmitter configured to transmit said actuating radioelectric signal when the control member 102 is actuated, and the actuating device may comprise a receiver configured to receive said actuating radioelectric signal and means for mechanically actuating the control actuator 202 upon receipt of said actuation radio signal.
- the accessory 100 (in particular the control member 102) can generate a radio release signal which is transmitted to the actuation device when the actuation of the control member 102 is stopped so that the actuation device stops the actuation of the control actuator 202.
- the transmitter can be configured to transmit said radio release signal when the actuation of the control member 102 is stopped
- the receiver can be configured to receive said radio release signal
- the actuation device can comprise means for stopping the actuation of the control actuator 202 upon receiving said radio release signal.
- the means for actuating and stopping may share the same motor and the same support member, as well as a program adapted to the control of the motor according to the radioelectric release signal or the radioelectric actuation signal.
- These first to fifth embodiments relating to propagation by the coupling device 103 are particularly suitable for ensuring propagation via the coupling device 103 while limiting the diffusion of vibrations resulting from the operation of the screwing and/or unscrewing device 200 towards the control member 102.
- the cable runs partly in the supporting structure 104 as is notably the case in Figures 2 to 10 where only portions of the 109 cable are visible. This helps protect the cable.
- this actuating device 108 comprises the adapter mentioned above and is therefore configured to be assembled on the screwing and/or unscrewing device 200 at the level of the control actuator 202 and in particular on the gripping member 201.
- this adapter is mounted, for example using screws, on the screwing and/or unscrewing device 200.
- the supporting structure 104 comprises a chassis, for example tubular, comprising two longitudinal members 104a, 104b on which the coupling system 105 is mounted, for example by fixing using screws.
- the chassis as illustrated adopts the general shape of a rectangular parallelepiped type frame.
- the chassis forms in particular a cage within which the screwing and/or unscrewing device 200 is mounted in the assembled configuration.
- the supporting structure 104 may be made of steel, just as the orientation member 107 and the elongated element 120.
- the coupling system 105 makes it possible both to secure, in the assembled configuration, the accessory 100 and the screwing and/or unscrewing device 200 together, and to ensure suitable vibration decoupling between the supporting structure 104 and the screwing and/or unscrewing device 200. To this end, there is a need to ensure this in a reliable, inexpensive and removable manner.
- the coupling system 105 may comprise a clamping flange 113 configured to, in the assembled configuration, grip the screwing and/or unscrewing device 200.
- the clamping flange 113 grips the screwing and/or unscrewing device 200.
- This clamping flange 113 may comprise a closed configuration ( figure 11 ) and may include an open configuration ( figure 12 ). The clamping flange 113 can vary between its open configuration and its closed configuration.
- the coupling system 105 may comprise a clamping device 114, distinct from the clamping flange 113, configured to, in the assembled configuration, grip the screwing and/or unscrewing device 200.
- this makes it possible to attach the screwing and/or unscrewing device 200 to the supporting structure 104 according to several attachment zones (via the clamping flange 113 and the clamping device 114) which results in good retention in the assembled configuration.
- the clamping device 114 grips the screwing and/or unscrewing device 200.
- This clamping device 114 may comprise a closed configuration ( figure 11 ) and may include an open configuration ( figure 12 ). The clamping device 114 can vary between its open configuration and its closed configuration.
- clamping flange 113 alone or with the clamping device 114 has been described.
- the clamping flange 113 and the clamping device 114 have the same function, i.e. participating in holding the screwing and/or unscrewing device 200 relative to the supporting structure 104, and their respective number is not limited to one in the sense that it can be adapted according to the form factor of the screwing and/or unscrewing device 200 in order to ensure suitable holding.
- the coupling system 105 can be configured so as to ensure a first vibration decoupling at a region for receiving the screwing and/or unscrewing device 200 within the clamping flange 113 and a second vibration decoupling between the clamping flange 113 and the supporting structure 104. This also makes it possible to ensure good retention of the screwing and/or unscrewing device 200 in the assembled configuration.
- the receiving region corresponds in particular to the location of a portion of the screwing and/or unscrewing device 200 gripped by the clamping flange 113 in the configuration assembly.
- the assembly 300 comprising the accessory 100 and the screwing and/or unscrewing device 200 is in particular such that the clamping flange 113 ensures the first vibration decoupling in particular in contact with the clamping flange 113 with the screwing and/or unscrewing device 200, and the second vibration decoupling.
- the coupling system 105 may comprise at least one damping member 115a, 115b, 115c, 115d configured to oppose, in the assembled configuration, the transmission of vibrations between the supporting structure 104 and the screwing and/or unscrewing device 200. It is the damping provided by the damping member 115a, 115b, 115c, 115d which makes it possible in particular to limit the aforementioned transmission of vibrations.
- figure 11 is a partial figure of the accessory 100 which illustrates a particular embodiment of the coupling system 105 as it is visible in Figures 2 to 8 .
- damping member 115a, 115b, 115c, 115d can apply to damping members 115a, 115b, 115c, 115d when there are several.
- damping member 115a, 115b, 115c, 115d is also called in the technical field of the invention an antivibration member.
- the damping member 115a, 115b, 115c, 115d may be chosen from: an anti-vibration pad, a spring system, a gas cylinder.
- the coupling system 105 comprises several damping members 115a, 115b, 115c, 115d, different types of the latter from the list mentioned in this paragraph may be combined.
- the anti-vibration pad can be made of any material suitable for absorbing vibrations, for example this material can be chosen from: rubber, elastomer, polyurethane.
- the coupling system 105 comprises a plurality of damping members 115a, 115b, 115c, 115d, this makes it possible, for example, to distribute the damping in an appropriate manner and therefore to adjust the desired vibration decoupling.
- damping members 115a, 115b, 115c, 115d are arranged to be in contact with the screwing and/or unscrewing device 200 in the assembled configuration. This allows satisfactory damping.
- four damping members 115a are arranged to be in contact with the screwing and/or unscrewing device 200 in the assembled configuration; this allows a suitable distribution around the screwing and/or unscrewing device 200 in order to participate in its maintenance while limiting the transmission of vibrations towards the supporting structure 104.
- damping members 115a in contact with the screwing and/or unscrewing device 200 in the assembled configuration makes it possible to avoid tearing of said damping members 115a.
- damping member 115a for example only one damping member 115a were used, for example of the anti-vibration pad type, it would work for example in compression in screwing and but in tension in unscrewing.
- Damping members of the anti-vibration pad type generally have very poor tear resistance.
- the advantage of having several anti-vibration pads located on either side of the screwing and/or unscrewing device 200 is to have compression resistance on at least one anti-vibration pad regardless of the working direction, i.e. screwing or unscrewing, of the screwing and/or unscrewing device 200.
- the coupling system 105 may comprise several damping members 115a each formed by an anti-vibration pad.
- these damping members 115a are in contact with the screwing and/or unscrewing device 200 and are distributed around the screwing and/or unscrewing device 200 such that, during use of the assembly 300 (i.e. when the function, for example the rotation of the motor 203 inducing a rotation of the shaft 204 of the screwing and/or unscrewing device 200 in the first direction of rotation S1 or in the second direction of rotation S2, is activated), at least one of these damping members 115a works in compression and at least one other of these damping members 115a works in tension; this makes it possible to improve the overall damping by absorbing vibrations in different directions.
- the clamping flange 113 has the closed configuration ( figure 10 ), for example by means of one or more screws 131, in which two parts 116a, 116b of the clamping flange 113 are urged towards each other with the interposition of at least one first damping member 115b of the plurality of damping members 115a, 115b, 115c, 115d.
- the clamping flange 113 may also comprise at least one second damping member 115a of the plurality of damping members 115a, 115b, 115c, 115d, said second damping member 115a being configured so that, in the closed configuration of the clamping flange 113 ( figure 11 ) and in the assembled configuration ( figures 3 And 7 ), be in contact with the screwing and/or unscrewing device 200 in order to participate in maintaining the screwing and/or unscrewing device 200 in the clamping flange 113, and therefore in particular relative to the supporting structure 104, in which the screwing and/or unscrewing device 200 is gripped by the clamping flange 113 in particular via contact of one or more second damping members 115a with the screwing and/or unscrewing device 200.
- the clamping flange 113 is connected to the supporting structure 104 at least by means of at least one third damping member 115c of the plurality of damping members 115a, 115b, 115c, 115d.
- This makes it possible to stage the damping via a first stage (via the second damping member(s) 115a) directly in contact with the screwing and/or unscrewing device 200, a second stage (via the first damping member(s) 115b) within the clamping flange 113 and a third stage (via the third damping member(s) 115c) between the clamping flange 113 and the supporting structure 104, in order to limit the transmission of vibrations to the supporting structure 104.
- the two parts 116a, 116b of the clamping flange 113 are formed by two separate pieces, as shown in the figure 11 .
- these two parts can be assembled, in the closed configuration of the flange 113, at least by means of two first damping members 115b of the plurality of damping members 115a, 115b, 115c, 115d arranged at the opposite longitudinal ends of said two parts so as to form a clamping collar in the closed configuration of the clamping flange 113.
- the two parts 116a, 116b of the clamping flange 113 may correspond to two opposite longitudinal ends of the same part of the clamping flange 113 forming a clamping collar.
- the closed configuration of the clamping flange 113 then corresponds to a state where the two longitudinal ends are fixed together with the interposition of the first damping member 115b.
- the clamping flange 113 comprises several second damping members 115a, for example four in number as illustrated in figure 11 .
- these second damping members 115a are distributed over the two parts 116a, 116b forming two separate parts or over the part forming a clamping collar so as to allow some of them to work simultaneously in tension and others in compression as mentioned above when it comes to anti-vibration pads.
- the clamping flange 113 has two mounting points to the supporting structure 104 such that the clamping flange 113 is fixed to each of the two side members 104a, 104b of the supporting structure 104.
- the clamping flange 113 is connected to the supporting structure 104, in particular at least by means of two third damping members 115c of the plurality of damping members 115a, 115b, 115c, 115d integral with the part 116b of the clamping flange 113 in figure 11 or the part forming the clamp collar.
- clamping flange 114 may comprise the open configuration which allows the screwing and/or unscrewing device 200 to be installed in, or removed from, the clamping flange 114.
- This open configuration is notably illustrated in figure 12 .
- screwing and/or unscrewing device 200 is provided with threaded holes 209 as shown for example in figure 1 , it may be provided that some of the second damping members 115a coming into contact with the screwing and/or unscrewing device 200 at these holes are associated with screws 130 then screwed into the screwing and/or unscrewing device 200 in the assembled configuration so as to improve the maintenance of the screwing and/or unscrewing device 200 relative to the supporting structure 104.
- this clamping device 114 may comprise two parts 117a, 117b configured to be stressed, in the closed configuration of the clamping device 114 (see figure 11 ), one towards the other so as to locally enclose, in the configuration assembled, the screwing and/or unscrewing device 200.
- One of said two parts 117a, 117b being fixed to the supporting structure 104 at least by means of at least one of the damping members 115d of the plurality of damping members 115a, 115b, 115c, 115d.
- the two parts 117a, 117b of the clamping device 114 are formed by two separate pieces, as shown in figure 11 .
- these two parts can be assembled, in the closed configuration of the clamping device 114 by means of two screws 118a, 118b so as to form a clamping collar.
- the two parts 117a, 117b of the clamping device 114 may correspond to two portions of the same part of the clamping device 114 shaped for a clamping collar.
- the closed configuration of the clamping device 114 then corresponds to a state where locally these two parts 117a, 117b of the clamping device 114 are fixed together for example using a screw.
- the clamping device 114 has two mounting points on the supporting structure 104 so that the clamping flange 113 is fixed to each of the two side members 104a, 104b for example using screws 132.
- the clamping device 114 is connected to the supporting structure 104 at least by means of two fourth damping members 115d of the plurality of damping members 115a, 115b, 115c, 115d integral with the part 117b in figure 11 or of the part forming the clamping collar of the clamping device 114.
- clamping device 114 may comprise the open configuration which makes it possible to install in the, or to remove from the, clamping device 114 the screwing and/or unscrewing device 200.
- This open configuration is notably illustrated in figure 12 .
- clamping flange 113 This allows the clamping flange 113 to provide suitable damping near the source of the vibrations of the screwing and/or unscrewing device 200, in particular using the damping members 115a, 115b, 115c (the first, second and third damping members) as described above.
- clamping flange 113 can be shaped to surround said part of the screwing and/or unscrewing device 200.
- the clamping flange 113 is mounted on the part of the screwing and/or unscrewing device 200, and the clamping device 114 is mounted at the level of the gripping member 201, in particular on, and more particularly through ( figures 3 And 7 ), the gripping organ 201.
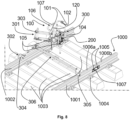
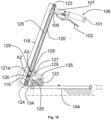
- the railway track 1000 may comprise two rails 1001, 1002 connected to each other by sleepers 1003 staggered according to the length of the rails 1001, 1002 as shown for example in the figures 4 And 8 .
- the rails 1001, 1002 are fixed to the sleepers 1003 via first fasteners 1004, also called lag screws.
- Each of the two rails 1001, 1002 may be formed of a plurality of rail portions 1006a, 1006b fixed to each other, two consecutive rail portions 1006a, 1006b may be fixed to each other via a fishplate 1007 and second fasteners 1005 fixing the fishplate 1007 to said two rail portions 1006a, 1006b.
- the accessory 100 may comprise a first configuration and a second configuration making it possible to orient the screwing and/or unscrewing device 200 in an appropriate manner whether the operator wants to screw or unscrew a second fastener 1005 or a first fastener 1004.
- the first configuration of the accessory 100 also called the fish-fitting configuration ( Figures 2 to 4 ), implies that the screwing or unscrewing direction of the screwing and/or unscrewing device 200 is adapted to the axial direction of the body of the second fastener 1005 to allow the screwing or unscrewing of the second fastener 1005.
- the second configuration of the accessory 100 also called the screwing configuration ( Figures 5 to 8 ), implies that the screwing or unscrewing direction of the screwing and/or unscrewing device 200 is adapted to the axial direction of the body of the first fastener 1004 to allow the screwing or unscrewing of the first fastener 1004.
- the first configuration of the accessory 100 is such that it makes it possible to position the shaft 204a of the screwing and/or unscrewing device 200 in a parallel direction, or forming an angle of between +25 degrees or -25 degrees, relative to a rolling plane on the railway track at the level of the second attachment 1005 to be screwed or unscrewed.
- the second configuration of the accessory 100 is such that it makes it possible to position the shaft 204a of the screwing and/or unscrewing device 200 in an orthogonal direction, or forming an angle of between +65 degrees or +115 degrees, relative to the rolling plane on the railway track at the level of the first fastener 1004 to be screwed or unscrewed.
- running plan is meant the plan in which a vehicle or trolley moves locally in line with (and therefore in particular on) the railway track.
- the first configuration of the indexing mechanism 118 opposes the change of predefined relative position for example by prohibiting/preventing the degree of mobility (notwithstanding a simple possible functional clearance).
- the second configuration of the indexing mechanism 118 allows the degree of mobility so as to allow the change of predefined relative position.
- the indexing mechanism 118 comprises a return member 119, such as a spring configured to vary the indexing mechanism 118 automatically from its second configuration to its first configuration when the relative positioning between the handling interface 106 and the supporting structure 104 corresponds to any of the predefined relative positions.
- a return member 119 such as a spring configured to vary the indexing mechanism 118 automatically from its second configuration to its first configuration when the relative positioning between the handling interface 106 and the supporting structure 104 corresponds to any of the predefined relative positions.
- the handling interface 106 is such that the elongate element 120 is pivotally mounted along a pivot axis A2 relative to the supporting structure 104 (see for example the Figures 13 to 15 ).
- the elongated element 120 may be a hollow tube.
- the accessory 100 comprises two plates 121a, 121b on which the pivot axis A2 is mounted. These two plates 121a, 121b are fixed to the supporting structure 104 by any suitable means such as for example by welding on the structure 104. carrier.
- the pivot axis A2 passes through the elongated element 120 and connects the two plates 121a, 121b.
- the elongated element 120 passes between the two plates 121a, 121b.
- the accessory 100 may comprise a spacer 122 which separates the two plates 121a, 121b and maintains their spacing.
- this spacer 122 comprises a first imprint 134 and a second imprint 135, for example each adopting the shape of a rectilinear groove open at its two opposite longitudinal ends, each configured to receive a portion of the elongated element 120.
- the first imprint 134 receives the portion of the elongated element 120 in the first configuration of the accessory 100 (fishing configuration) and the second imprint 135 receives the portion of the elongated element 120 in the second configuration of the accessory 100 (screwing configuration).
- the first imprint 134 receives the portion of the elongated element 120 it participates in maintaining the elongated element 120 and when the second imprint 135 receives the portion of the elongated element 120 it participates in maintaining the elongated element 120.
- This allows the accessory 100 to better resist residual vibrations and the forces that it undergoes during its use.
- the end of the rod 125 cooperates with the return member 119, such as a compression spring, for example constantly compressed between said end of the rod 125 and the support element 124.
- This support element 124 may be a plug closing the hollow tube opposite the handling interface 106.
- the manipulation of the indexing mechanism 118 can be according to the following kinematics.
- the axis A3 of the indexing mechanism 118 is engaged in two notches 129 from which it follows that the maintenance of the predefined relative position of the manipulation interface 106 with respect to the supporting structure 104 is ensured.
- the actuation button 123 this will push the rod 125 into the hollow tube where it will slide until the axis A3 of the indexing mechanism 118 passes from the notches 129 to the slides 128 (passage from the first configuration of the indexing mechanism 118 to the second configuration of the indexing mechanism 118) from which it follows that the pivoting of the manipulation interface 106 is authorized.
- the return member 119 will push the rod 125 and therefore the axis A3 of the indexing mechanism 118 so that the rod 125 slides again and the axis A3 of the indexing mechanism 118 engages in said two notches 129, resulting in an automatic passage of the indexing mechanism 118 to the first configuration, thus maintaining the new predefined relative position of the handling interface 106 relative to the supporting structure 104.
- the sliding amplitude of the rod 125 in the hollow tube is notably chosen so as to allow the variation between the first configuration of the indexing mechanism 118 and the second configuration of the indexing mechanism 118.
- the notch 129 located between said two opposite notches 129 corresponds to a notch 129 in which the axis A3 of the mechanism is engaged 118 indexing in an intermediate configuration (not shown) making it possible to give a particular angle to the screwing and/or unscrewing device 200 in order to adapt to certain situations where the fastener to be screwed or unscrewed would be at an angle relative to the rolling plane on the railway track locally at this fastener.
- the slides 128 can condition the amplitude of the degree of mobility.
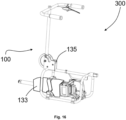
- the assembly 300 comprises a carriage 301 ( figures 4 And 8 ), the carriage 301 comprising a rolling system 302 for rolling on the rails 1001, 1002 of the railway track 1000, in particular to be maintained, and an articulated arm 303 at the end of which the accessory 100 is mounted.
- this articulated arm 303 is mounted on the elongated element 120 so that the orientation of the supporting structure 104 can be carried out in order to allow the transition to the fish-rigging or screw-pulling configuration while maintaining the handling handle(s) 101 at a height suitable for the operator.
- the articulated arm 303 may comprise a means for relieving the weight of the accessory 100 and the screwing and/or unscrewing device 200, such as a jack.
- the rolling system 302 may comprise at least one wheel 304 for rolling on one of the two rails 1002 and at least one wheel 305 for rolling on the other 1001 of the two rails.
- a chassis 306 of the rolling system 302 may connect the wheels 304, 305.
- the accessory 100 comprises a noise-reducing member 133 intended to cooperate with the screwing and/or unscrewing device 200 in the assembled configuration in order to attenuate the operating noise of the screwing and/or unscrewing device 200.
- this anti-noise member 133 is present and cooperates with the screwing and/or unscrewing device 200, for example by partially surrounding the latter.
- the noise-reducing member 133 may be a sleeve or a particular covering placed around the screwing and/or unscrewing device 200 in the assembled configuration.
- the clamping flange 113 and/or the clamping device 114 may, in the assembled configuration, come into contact with a portion of these support pads or these support pads so that, in the assembled configuration, all or part of the support pads participate in the vibration decoupling.
- the accessory 100 may comprise ground support elements 140 ( figure 2 ) for example four in number and mounted on the supporting structure 104. These support elements 140 allow the accessory 100 to be placed on the ground without damaging it.
- the present invention clearly finds an industrial application in the railway field and in particular in the maintenance of railway tracks.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Clamps And Clips (AREA)
- Mechanical Control Devices (AREA)
Abstract
Description
- Le domaine technique de l'invention concerne le vissage et/ou le dévissage d'attache(s) d'une voie ferrée. Plus particulièrement, l'invention est relative à un accessoire pour un dispositif de vissage et/ou de dévissage pour attache de voie ferrée.
- Une voie ferrée comprend classiquement deux rails reliés entre eux par des traverses échelonnées selon la longueur des rails. Les rails sont fixés aux traverses via des attaches. Chacun des deux rails peut être formé d'une pluralité de portions de rail fixées entre elles, deux portions de rail consécutives peuvent être fixées entre elles via une éclisse et des attaches fixant l'éclisse auxdites deux portions de rail.
- Les attaches peuvent être vissées et/ou dévissées en utilisant un dispositif de vissage et/ou de dévissage, par exemple de type clé à chocs, manipulé par un opérateur. Les vibrations issues d'un tel dispositif de vissage et/ou de dévissage sont néfastes pour l'opérateur et peuvent provoquer chez ce dernier des troubles musculo-squelettiques.
- Il existe un besoin d'améliorer la sécurité de l'opérateur en limitant de manière efficiente les vibrations perçues par cet opérateur lors de l'utilisation du dispositif de vissage et/ou de dévissage.
- L'objet de la présente invention est d'améliorer l'utilisation d'un dispositif de vissage et/ou de dévissage pour attache de voie ferrée, notamment pour améliorer la sécurité d'un opérateur.
- A cet effet, l'invention est relative à un accessoire pour le dispositif de vissage et/ou de dévissage pour attache de voie ferrée, le dispositif de vissage et/ou de dévissage comprenant :
- un organe de préhension ;
- un actionneur de commande pour commander une fonction du dispositif de vissage et/ou de dévissage ;
- une poignée de manipulation ;
- un organe de commande ;
- un dispositif de couplage relié à l'organe de commande et configuré pour être relié au dispositif de vissage et/ou de dévissage pour propager un actionnement de l'organe de commande au dispositif de vissage et/ou de dévissage ;
- une structure porteuse solidaire de la poignée de manipulation et de l'organe de commande ;
- un système de couplage configuré pour permettre d'assembler de manière démontable le dispositif de vissage et/ou de dévissage à la structure porteuse et pour assurer, dans une configuration assemblée du dispositif de vissage et/ou de dévissage à la structure porteuse, un découplage vibratoire entre la poignée de manipulation et l'organe de préhension.
- Un tel accessoire présente l'avantage d'être monté au dispositif de vissage et/ou de dévissage via le système de découplage afin d'assurer le découplage vibratoire entre la structure porteuse et la poignée de manipulation. Ainsi, l'opérateur n'a plus besoin :
- d'agir sur l'organe de préhension pour manipuler le dispositif de vissage et/ou de dévissage qui se manipule, au moins en partie, via l'accessoire ;
- d'agir directement et manuellement sur l'actionneur de commande pour commander la fonction ;
- L'accessoire peut en outre comprendre une ou plusieurs des caractéristiques suivantes.
- Selon une caractéristique de l'accessoire, le dispositif de couplage est configuré pour, lorsque ledit dispositif de couplage est relié au dispositif de vissage et/ou de dévissage :
- propager mécaniquement l'actionnement de l'organe de commande à l'actionneur de commande ; ou
- autoriser une propagation d'un signal électrique de commande, lors de l'actionnement de l'organe de commande, directement au dispositif de vissage et/ou de dévissage ; ou
- propager, lors de l'actionnement de l'organe de commande, un signal électrique de commande généré par l'accessoire à un dispositif d'actionnement configuré pour assurer un actionnement mécanique de l'actionneur de commande suite à la réception du signal électrique de commande par ledit dispositif d'actionnement, le dispositif de couplage comprenant le dispositif d'actionnement ; ou
- propager un signal radioélectrique d'actionnement généré par l'accessoire, lors de l'actionnement de l'organe de commande, directement au dispositif de vissage et/ou de dévissage ;
- propager un signal radioélectrique d'actionnement généré par l'accessoire, lors de l'actionnement de l'organe de commande, à un dispositif d'actionnement configuré pour assurer un actionnement mécanique de l'actionneur de commande suite à la réception du signal électrique d'actionnement par ledit dispositif d'actionnement, le dispositif de couplage comprenant le dispositif d'actionnement.
- Ces différents moyens de propager l'actionnement de l'organe de commande sont tout particulièrement adaptés dans le sens où ils limitent le ressenti de vibrations par l'opérateur au niveau de l'organe de commande.
- Selon une caractéristique de l'accessoire, le système de couplage comprend une bride de serrage configurée pour, dans la configuration assemblée, enserrer le dispositif de vissage et/ou de dévissage.
- Cela permet de brider le dispositif de vissage et/ou de dévissage et donc de participer à son maintien efficace par rapport à la structure porteuse dans la configuration d'assemblage.
- Selon une caractéristique de l'accessoire, le système de couplage comprend un dispositif de serrage, distinct de la bride de serrage, configuré pour, dans la configuration assemblée, enserrer le dispositif de vissage et/ou de dévissage.
- Cela permet de serrer le dispositif de vissage et/ou de dévissage dans deux zones distinctes et donc de participer à un meilleur maintien du dispositif de vissage et/ou de dévissage par rapport à la structure porteuse dans la configuration d'assemblage.
- Selon une caractéristique de l'accessoire, le système de couplage est configuré de sorte à assurer un premier découplage vibratoire au niveau d'une région d'accueil du dispositif de vissage et/ou de dévissage au sein de la bride de serrage et un deuxième découplage vibratoire entre la bride de serrage et la structure porteuse.
- Cela permet un meilleur maintien du dispositif de vissage et/ou de dévissage lorsqu'il est monté à la structure porteuse via le système de découplage et de diminuer les vibrations au niveau de poignée de manipulation et de l'organe de commande
- Selon une caractéristique de l'accessoire, le système de couplage comprend au moins un organe d'amortissement configuré pour s'opposer, dans la configuration assemblée, à la transmission de vibrations entre le dispositif de vissage et/ou de dévissage et la structure porteuse.
- Le rôle de cet organe d'amortissement est de réduire les vibrations perçues par l'opérateur.
- Selon une caractéristique de l'accessoire, le système de couplage comprend une pluralité d'organes d'amortissement.
- Cela permet d'avoir plusieurs points/zones de maintien du dispositif de vissage et/ou de dévissage pour qu'il soit suffisamment maintenu et que, le cas échéant, les organes d'amortissement résistent aux vibrations et/ou chocs engendrés par le dispositif de vissage et/ou de dévissage.
- Selon une caractéristique de l'accessoire :
- la bride de serrage présente une configuration fermée dans laquelle deux parties de la bride de serrage sont sollicitées l'une en direction de l'autre avec interposition d'au moins un premier organe d'amortissement de la pluralité d'organes d'amortissement ;
- la bride de serrage comprend au moins un deuxième organe d'amortissement de la pluralité de d'organes d'amortissement, ledit deuxième organe d'amortissement étant configuré pour, dans la configuration fermée de la bride de serrage et dans la configuration assemblée, être au contact du dispositif de vissage et/ou de dévissage afin de participer au maintien du dispositif de vissage et/ou de dévissage dans la bride de serrage ;
- la bride de serrage est reliée à la structure porteuse au moins par l'intermédiaire d'au moins un troisième organe d'amortissement de la pluralité d'organes d'amortissement.
- Cela permet d'assurer une limitation du transfert de vibrations du dispositif de vissage et/ou de dévissage à la structure porteuse lorsqu'il est bridé par la bride de serrage (i.e. dans la configuration d'assemblage) dans le sens où :
- le deuxième organe d'amortissement participe à la formation d'un premier étage de découplage vibratoire au contact du dispositif de vissage et/ou de dévissage ;
- le premier organe d'amortissement participe à la formation d'un, ou forme, un deuxième étage de découplage vibratoire au niveau de la fermeture de la bride de serrage entre les deux portions de la bride de serrage qui sont sollicitées l'une en direction de l'autre avec interposition dudit premier organe d'amortissement ;
- le troisième organe d'amortissement participe à la formation d'un, ou forme un troisième étage de découplage vibratoire à la jonction entre la bride de serrage et la structure porteuse.
- Selon une caractéristique de l'accessoire, le dispositif de serrage comprend deux parties configurées pour être sollicitées, dans une configuration fermée du dispositif de serrage, l'une en direction de l'autre de sorte à enserrer localement, dans la configuration assemblée, le dispositif de vissage et/ou de dévissage, l'une desdites deux parties étant fixée à la structure porteuse au moins par l'intermédiaire d'au moins un des organes d'amortissement de la pluralité d'organes d'amortissement.
- Cela permet une bonne tenue du dispositif de vissage et/ou de dévissage à la structure porteuse dans la configuration assemblée, tout en présentant un amortissement idoine.
- Selon une caractéristique de l'accessoire, le dispositif de vissage et/ou de dévissage, destiné à être assemblé avec l'accessoire, comprend un moteur, un mécanisme à chocs et une partie de liaison reliant le moteur et le mécanisme à chocs, et dans lequel :
- la bride de serrage est conformée pour être montée sur une partie du dispositif de vissage et/ou de dévissage choisie parmi :
- ∘ la partie de liaison ;
- ∘ le moteur ;
- ∘ le mécanisme à chocs ;
- le dispositif de serrage est conformé pour être monté au niveau de l'organe de préhension.
- Cela permet de maximiser l'absorption des vibrations du côté de leur source que forme le moteur et le mécanisme à chocs et d'assurer un maintien adéquat du dispositif de vissage et/ou de dévissage par rapport à la structure porteuse du côté de l'organe de préhension.
- Selon une caractéristique de l'accessoire, l'accessoire comprend une interface de manipulation, l'interface de manipulation comprenant l'organe de commande et la poignée de manipulation, l'interface de manipulation étant montée selon au moins un degré de mobilité par rapport à la structure porteuse, l'accessoire comprenant un mécanisme d'indexation configuré pour autoriser le positionnement de l'interface de manipulation par rapport à la structure porteuse selon au moins deux positions relatives prédéfinies différentes, ledit mécanisme d'indexation étant configuré de sorte à présenter :
- une première configuration dans laquelle il maintient le positionnement de l'interface de manipulation par rapport à la structure porteuse lorsque le positionnement relatif entre l'interface de manipulation et la structure porteuse est dans l'une quelconque des positions relatives prédéfinies ;
- une deuxième configuration dans laquelle le degré de mobilité de l'interface de manipulation par rapport à la structure porteuse est autorisé.
- Cela permet d'utiliser le dispositif de vissage et/ou de dévissage, via l'accessoire, de manière ergonomique pour l'opérateur selon qu'il souhaite visser ou dévisser une attache d'éclisse de voie ferrée ou qu'il souhaite visser ou dévisser une attache de solidarisation d'un rail de la voie ferrée à une traverse de la voie ferrée lorsque l'accessoire et le dispositif de vissage et/ou de dévissage sont assemblés.
- Selon une caractéristique de l'accessoire, le mécanisme d'indexation comprend un organe de rappel configuré pour faire varier le mécanisme d'indexation automatiquement depuis sa deuxième configuration vers sa première configuration lorsque le positionnement relatif entre l'interface de manipulation et la structure porteuse correspond à l'une quelconque des positions relatives prédéfinies.
- Cela permet d'aider l'opérateur à la manipulation de l'accessoire.
- L'invention est aussi relative à un ensemble comprenant un dispositif de vissage et/ou de dévissage pour attache de voie ferrée et un accessoire tel que décrit, le dispositif de vissage et/ou de dévissage comprenant un organe de préhension et un actionneur de commande pour commander une fonction du dispositif de vissage et/ou de dévissage, dans cet ensemble :
- le dispositif de couplage est relié au dispositif de vissage et/ou de dévissage ;
- l'ensemble est dans la configuration assemblée dans laquelle le dispositif de vissage et/ou de dévissage et la structure porteuse sont assemblés par le système de couplage qui assure un découplage vibratoire entre la poignée de manipulation et l'organe de préhension.
- Cela permet d'assurer le découplage vibratoire au niveau de la poignée de manipulation. L'opérateur n'a plus besoin d'agir sur l'organe de préhension pour manipuler le dispositif de vissage et/ou de dévissage qui se manipule, au moins en partie alors via l'accessoire, il en résulte que l'utilisation du dispositif de vissage et/ou de dévissage par l'intermédiaire de l'accessoire est plus reposante pour l'opérateur et permet de tendre à limiter les troubles musculo-squelettiques.
- L'ensemble peut comprendre un chariot, le chariot comprenant un système de roulage pour rouler sur les rails de la voie ferrée à entretenir et un bras articulé au bout duquel est monté l'accessoire.
- Cela permet de soulager l'opérateur, en limitant le poids de l'ensemble formé par l'accessoire et le dispositif de vissage et/ou de dévissage du point de vue de l'opérateur.
- D'autres avantages et caractéristiques pourront ressortir de la description détaillée qui suit.
- L'invention sera mieux comprise à la lecture de la description détaillée qui suit, donnée uniquement à titre d'exemple non limitatif et faite en se référant aux dessins annexés et listés ci-dessous.
- La
figure 1 illustre une vue en perspective d'un dispositif de vissage et/ou de dévissage pour attache de voie ferrée. - La
figure 2 illustre, selon un mode de réalisation particulier, une vue en perspective d'un accessoire pour le dispositif de vissage et/ou de dévissage dans une première configuration de l'accessoire, cettefigure 2 représentant l'accessoire seul sans le dispositif de vissage et/ou de dévissage. - La
figure 3 illustre une vue en perspective d'un ensemble comprenant l'accessoire et le dispositif de vissage et/ou de dévissage assemblés dans la première configuration de l'accessoire. - La
figure 4 illustre, selon une vue en perspective, l'ensemble de lafigure 3 comprenant un chariot reposant sur une voie ferrée. - La
figure 5 illustre une vue en perspective de l'accessoire dans une deuxième configuration, cettefigure 5 représentant l'accessoire seul sans le dispositif de vissage et/ou de dévissage. - La
figure 6 illustre une vue de côté de l'accessoire de lafigure 5 . - La
figure 7 est une vue en perspective de l'ensemble comprenant l'accessoire et le dispositif de vissage et/ou de dévissage assemblés dans la deuxième configuration de l'accessoire. - La
figure 8 est une vue en perspective illustrant l'ensemble de lafigure 7 comprenant le chariot reposant sur une voie ferrée. - La
figure 9 est une vue partielle de coté de l'ensemble tel que visible enfigure 3 ou7 centré sur un organe de préhension du dispositif de vissage et/ou de dévissage. - La
figure 10 correspond à lafigure 9 pour laquelle le dispositif de vissage et/ou de dévissage a été retiré. - La
figure 11 est une vue en perspective partielle de l'accessoire centrée sur un système de couplage appartenant à l'accessoire et comprenant une bride de serrage et un dispositif de serrage fermés. - La
figure 12 correspond à lafigure 11 , sur cettefigure 12 , la bride de serrage et le dispositif de serrage sont ouverts. - La
figure 13 est une vue partielle en coupe de l'accessoire tel que visible enfigure 2 et centrée sur un mécanisme d'indexation appartenant à l'accessoire permettant de positionner de manière adaptée une poignée de manipulation et un organe de commande appartenant à l'accessoire par rapport à une structure porteuse appartenant à l'accessoire. - La
figure 14 illustre l'accessoire selon une vue de côté dans une configuration transitoire permettant de changer le positionnement de la poignée de manipulation et de l'organe de commande par rapport à la structure porteuse. - La
figure 15 illustre une vue en coupe d'une partie de l'accessoire permettant de visualiser le mécanisme d'indexation dans la configuration transitoire. - La
figure 16 illustre, selon une vue en perspective, l'ensemble pour lequel l'accessoire comprend, selon un perfectionnement, un organe antibruit. - Sur ces figures, les mêmes références sont utilisées pour désigner les mêmes éléments. Les éléments représentés sur les différentes figures ne sont pas nécessairement réalisés à l'échelle afin de faciliter la compréhension des figures.
- Dans la présente description, une attache peut comprendre une tête, par exemple hexagonale, et un corps au moins partiellement fileté s'étendant depuis la tête.
- Un dispositif 200 de vissage et/ou de dévissage pour attache de voie ferrée comprend un organe 201 de préhension et un actionneur 202 de commande pour commander une fonction du dispositif 200 de vissage et/ou de dévissage. Un exemple de réalisation du dispositif 200 de vissage et/ou de dévissage est illustré en
figure 1 . - La fonction peut être la rotation d'un moteur 203 du dispositif 200 de vissage et/ou de dévissage. Ainsi, par exemple, lorsqu'un opérateur appui sur l'actionneur 202 de commande cela permet d'assurer la rotation d'un arbre 204, couplé au moteur 203, à une extrémité 204a duquel une douille (non représentée et aussi appelée clé) ayant une forme lui permettant de recevoir la tête de l'attache à visser ou dévisser, ou une rallonge, peut être montée par exemple via un dispositif 210 à bille agencé à l'extrémité 204a pour permettre un montage/démontage rapide de la douille ou de la rallonge. L'extrémité 204a est opposée au moteur 203. Le cas échéant, le dispositif 200 de vissage et/ou de dévissage comprend le dispositif 210 à bille.
- L'organe 201 de préhension adopte notamment la forme d'une poignée configurée pour être saisie à la main par l'opérateur. Ainsi, de manière plus générale, l'organe 201 de préhension est destiné à être saisi par l'opérateur qui peut alors tenir manuellement le dispositif 200 de vissage et/ou de dévissage via cet organe 201 de préhension.
- L'actionneur 202 de commande peut être formé par une gâchette munie d'un interrupteur. Ainsi, lorsque l'opérateur actionne la gâchette (notamment manuellement), cela permet notamment de mettre en route le moteur 203 (i.e. le mettre en rotation) et notamment d'entraîner en rotation l'arbre 204.
- Par « dispositif 200 de vissage et/ou de dévissage », il est entendu que le dispositif 200 de vissage et/ou de dévissage peut permettre soit uniquement de visser, soit uniquement de dévisser, soit d'assurer, au choix de l'opérateur, un vissage ou un dévissage par exemple via un sélecteur 205 de sens de rotation du moteur 203 d'où il résulte que l'arbre 204 tourne dans un premier sens S1 ou dans un deuxième sens S2 opposé au premier sens S1. Par exemple, le sélecteur 205 peut être à quatre positions incluant :
- une première position correspondant à une position de desserrage permettant de faire tourner, sur actionnement de l'actionneur 202 de commande, l'arbre 204 à pleine puissance du moteur 203 dans le cadre du dévissage d'une attache ;
- une deuxième position correspondant à une position de serrage permettant de faire tourner, sur actionnement de l'actionneur 202 de commande, l'arbre 204 à une première puissance du moteur 203 dans le cadre du vissage d'une attache ;
- une deuxième position correspondant à une position de serrage permettant de faire tourner, sur actionnement de l'actionneur 202 de commande, l'arbre 204 à une deuxième puissance du moteur 203, strictement supérieure à la première puissance ; dans le cadre du vissage d'une attache ;
- une troisième position correspondant à une position de serrage permettant de faire tourner, sur actionnement de l'actionneur 202 de commande, l'arbre 204 à une troisième puissance du moteur 203, strictement supérieure à la deuxième puissance.
- Ces première, deuxième et troisième puissances permettent d'adapter le fonctionnement du dispositif 200 de vissage et/ou de dévissage par exemple en fonction du couple rencontré lors du vissage. Pour le dévissage, le couple du moteur 203 sera élevé afin de desserrer l'attache convenablement, notamment si cette dernière est grippée.
- Le passage du moteur 203 en configuration de vissage vers une configuration de vissage peut se faire par inversion de phase commandée par le sélecteur 205.
- Le dispositif 200 de vissage et/ou de dévissage peut être à alimentation par une ou plusieurs batteries 206 (
figure 1 ) montées de manière démontable au reste du dispositif 200 de vissage et/ou de dévissage. Cet exemple n'est pas limitatif dans le sens où le dispositif 200 de vissage et/ou de dévissage pourrait utiliser une autre source d'énergie comme une alimentation électrique par câble ou un carburant fossile pour mettre en action (i.e. en rotation) son moteur 203 de sorte à entraîner la rotation de l'arbre 204. - De préférence, le dispositif 200 de vissage et/ou de dévissage comprend un mécanisme 207 à chocs. Le mécanisme 207 à chocs peut être un mécanisme de frappe (dans ce cas le dispositif 200 de vissage et/ou de dévissage est aussi appelé visseuse à chocs) ou un mécanisme de percussion (dans ce cas le dispositif 200 de vissage et/ou de dévissage est aussi appelé clé à chocs).
- Le dispositif 200 de vissage et/ou de dévissage peut aussi comprendre une partie 208 de liaison reliant le moteur 203 et le mécanisme 207 à chocs.
- Il résulte de l'utilisation du dispositif 200 de vissage et/ou de dévissage que son fonctionnement, par exemple via le moteur 203 et/ou via le mécanisme 207 à chocs, induit la propagation de vibrations au niveau de l'organe 201 de préhension et de l'actionneur 202 de commande. De telles vibrations sont néfastes pour l'opérateur et peuvent provoquer chez ce dernier des troubles musculo-squelettiques.
- Pour tendre à limiter les vibrations perçues par l'opérateur lors de l'utilisation du dispositif 200 de vissage et/ou de dévissage, l'invention est relative à un accessoire 100 pour le dispositif 200 de vissage et/ou de dévissage. Les
figures 2 à 8 illustrent notamment un mode de réalisation particulier de cet accessoire 100 selon différentes configurations d'utilisation qui seront détaillées ci-après. - L'accessoire 100 comprend une poignée 101 de manipulation, un organe 102 de commande, un dispositif 103 de couplage, une structure 104 porteuse solidaire de la poignée 101 de manipulation et de l'organe 102 de commande ; un système 105 de couplage configuré pour permettre d'assembler de manière démontable le dispositif 200 de vissage et/ou de dévissage à la structure 104 porteuse et pour assurer, dans une configuration assemblée du dispositif 200 de vissage et/ou de dévissage à la structure 104 porteuse, un découplage vibratoire entre la poignée 101 de manipulation et l'organe 201 de préhension.
- La configuration assemblée, i.e. obtenue lorsque l'accessoire 100 et le dispositif 200 de vissage et/ou de dévissage sont assemblés est par exemple visible en
figures 3 ,4 ,7 et8 . - Le dispositif 103 de couplage est relié à l'organe 102 de commande et est configuré pour être relié au dispositif 200 de vissage et/ou de dévissage afin de/pour propager un actionnement de l'organe 102 de commande au dispositif 200 de vissage et/ou de dévissage, notamment dans la configuration assemblée. Autrement dit, le dispositif 103 de couplage est relié à l'organe 102 de commande et est configuré pour être relié au dispositif 200 de vissage et/ou de dévissage afin que l'actionnement de l'organe 102 de commande permette de commander la fonction du dispositif 200 de vissage et/ou de dévissage depuis l'accessoire 100.
- Outre le fait que l'accessoire 100 permette de limiter les vibrations perçues par l'opérateur lors de l'utilisation du dispositif 200 de vissage et/ou de dévissage depuis cet accessoire 100, l'accessoire 100 permet aussi de déporter la commande du dispositif 200 de vissage et/ou de dévissage au niveau de l'accessoire 100. Ainsi, l'opérateur n'a plus la nécessité d'interagir directement avec le dispositif 200 de vissage et/ou de dévissage pour actionner l'actionneur 202 de commande lorsque l'accessoire 100 et le dispositif 200 de vissage et/ou de dévissage sont assemblés (i.e. dans la configuration assemblée). Il en résulte que la fonction peut être commandée, dans la configuration assemblée, directement depuis l'accessoire 100 par actionnement de l'organe 102 de commande, sans que cet actionnement ne soumette l'opérateur aux vibrations auxquelles il aurait été soumis par actionnement manuel directement sur l'actionneur 202 de commande.
- Autrement dit, de préférence, le système 105 de couplage est aussi configuré pour assurer, dans la configuration assemblée, un découplage vibratoire entre l'organe 102 de commande et l'actionneur 202 de commande.
- Bien entendu, l'accessoire 100 en tant que tel peut être considéré isolément, i.e. lorsque le dispositif 200 de vissage et/ou de dévissage et l'accessoire 100 sont disjoints. Dès lors, la référence à la configuration assemblée en parlant de l'accessoire 100 permet de définir l'accessoire 100 selon sa coopération avec le dispositif 200 de vissage et/ou de dévissage ; le système 105 de couplage étant destiné à assurer le découplage vibratoire dans la configuration assemblée.
- La poignée 101 de manipulation permet à l'opérateur de manipuler manuellement l'accessoire 100.
- L'organe 102 de commande peut adopter la forme d'une poignée de type apte à varier entre une position de repos vers laquelle elle est constamment sollicitée et une position d'actionnement obtenue par appui de l'opérateur sur ladite poignée.
- Il résulte que de ce qui a été décrit ci-avant que l'invention est aussi relative à un ensemble 300 comprenant le dispositif 200 de vissage et/ou de dévissage et l'accessoire 100. L'ensemble 300 est dans la configuration assemblée (i.e. l'ensemble 300 comprend la configuration assemblée) dans laquelle le dispositif 200 de vissage et/ou de dévissage et la structure 104 porteuse sont assemblés par (i.e. via) le système 105 de couplage qui assure un découplage vibratoire entre la poignée 101 de manipulation et l'organe 201 de préhension. Ainsi, le système 105 de couplage assure le découplage vibratoire entre la structure 104 porteuse et le dispositif 200 de vissage et/ou de dévissage. Par ailleurs, dans cet ensemble 300, le dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage pour, le cas échéant, propager l'actionnement de l'organe 102 de commande au dispositif 200 de vissage et/ou de dévissage. Notamment, l'ensemble 300 est visible en
figures 3 ,4 ,7 et8 . - L'ensemble 300 peut être un dispositif d'entretien pour voie ferrée.
- Par la suite, tout ce qui s'applique à l'accessoire 100 s'applique aussi à l'ensemble 300 qui comprend l'accessoire 100 et au sein duquel la configuration assemblée est présente, i.e. que l'accessoire 100 et le dispositif 200 de vissage et/ou de dévissage sont effectivement assemblés
- Sur l'exemple des
figures 3 ,4 ,7 et8 , le dispositif 200 de vissage et/ou de dévissage est celui visible enfigure 1 . - Par « système 105 de couplage configuré pour permettre d' assembler de manière démontable le dispositif 200 de vissage et/ou de dévissage à la structure 104 porteuse », il est entendu que le montage et le démontage peuvent être assurés avec ou sans l'utilisation d'outils.
- L'accessoire 100 peut comprendre deux poignées 101 de manipulation comme visible aux
figures 2 à 5 et7 à 8 , cela permet de faciliter la manipulation de l'accessoire 100 par l'opérateur. - En particulier, l'accessoire 100 comprend une interface 106 de manipulation comprenant l'organe 102 de commande et la ou les poignées 101 de manipulation.
- Par exemple, l'interface 106 de manipulation comprend un organe 107 d'orientation, tel qu'un guidon, ou cintre. Les poignées 101 de manipulation sont montées aux extrémités longitudinales opposées de l'organe 107 d'orientation. L'organe 102 de commande est alors monté sur l'organe 107 d'orientation au niveau de l'une des poignées 101 de manipulation (la poignée droite aux
figures 2 à 5 et7 à 8 ). - L'interface 106 de manipulation, et plus particulièrement l'organe 107 d'orientation, peut être relié(e) à la structure 104 porteuse au moins par l'intermédiaire d'un élément 120 allongé tel qu'un montant. L'organe 107 d'orientation peut alors être fixé à l'élément 120 allongé qui peut adopter la forme d'une potence.
- Notamment, le découplage vibratoire assuré par le système 105 de couplage, dans la configuration assemblée, correspond à un découplage vibratoire entre le dispositif 200 de vissage et/ou de dévissage et une partie de l'accessoire 100 comprenant la structure 104 porteuse, l'interface 106 de manipulation, et le cas échéant l'élément 120 allongé.
- Comme évoqué ci-dessus, le déport de la commande de la fonction sur l'accessoire 100 par l'organe 102 de commande nécessite la présence du dispositif 103 de couplage afin de propager l'actionnement de l'organe 102 de commande pour activer la fonction lorsque le dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage. La notion de propagation est à prendre au sens large dans le sens où elle peut être mise en oeuvre par tout moyen permettant d'assurer, lorsque le dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage et notamment dans la configuration assemblée, une activation de la fonction par actionnement de l'organe 102 de commande.
- Selon un premier mode de réalisation relatif à la propagation par le dispositif 103 de couplage, le dispositif 103 de couplage est configuré pour, lorsque ledit dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage, propager mécaniquement l'actionnement de l'organe 102 de commande à l'actionneur 202 de commande.
- Par exemple, le dispositif 103 de couplage peut comprendre un câble 109 (
figures 2 ,3 ,5 ,6 ,7 , et9 à 14 ), notamment métallique, relié mécaniquement à l'organe 102 de commande et à un dispositif 108 d'actionnement. Le dispositif 103 de couplage comprend ce dispositif 108 d'actionnement. - Le dispositif 108 d'actionnement peut comprendre un adaptateur, par exemple formé par deux coques 112a, 112b conformées pour être montées sur le dispositif 200 de vissage et/ou de dévissage et ainsi assurer un maintien idoine du dispositif 108 d'actionnement au niveau de l'actionneur 202 de commande. Cet adaptateur peut être configuré pour être monté sur le dispositif 200 de vissage et/ou de dévissage de manière démontable avec ou sans l'utilisation d'outils.
- Les
figures 9 et10 sont centrées sur le dispositif 108 d'actionnement selon une mise en oeuvre particulière du premier mode de réalisation relatif à la propagation par le dispositif 103 de couplage et pour laquelle la coque 112b a été retirée afin de visualiser l'intérieur du dispositif 108 d'actionnement. - Le dispositif 108 d'actionnement peut comprendre un organe 110 d'appui de sorte que l'actionnement de l'organe 102 de commande induise, via le câble 109 fixé à cet organe 110 d'appui et à l'organe 102 de commande, une mise en mouvement de l'organe 110 d'appui, par exemple autour d'un axe A1 de rotation, permettant à l'organe 110 d'appui d'exercer localement un effort sur l'actionneur 202 de commande. Par exemple, cet effort reproduit l'actionnement manuel de l'actionneur 202 de commande par l'opérateur.
- Notamment, les
figures 9 et10 illustrent l'organe 110 d'appui dans une configuration de repos, dans laquelle il n'actionne pas l'actionneur 202 de commande, qu'il présente lorsque l'organe 102 d'actionnement n'est pas actionné par l'opérateur. Lorsque l'organe 102 d'actionnement est actionné, i.e. qu'un effort d'actionnement est exercé par l'opérateur sur l'organe 102 d'actionnement, le câble 109 peut être tiré par l'organe 102 de commande d'où il résulte une mise en rotation de l'organe 110 d'appui autour de l'axe A1 de rotation selon la direction de la flèche F1 de lafigure 10 . Ainsi, il est compris que cette rotation selon la flèche F1 permet, enfigure 9 , d'actionner l'actionneur 202 de commande lorsque le dispositif 108 d'actionnement est monté sur le dispositif 200 de vissage et/ou de dévissage. - De préférence, afin que la fonction soit désactivée/stoppée automatiquement lorsque l'opérateur relâche son effort d'actionnement sur l'organe 102 d'actionnement, le dispositif 108 d'actionnement peut comprendre un organe 111 de rappel, tel qu'un ressort, sollicitant constamment l'organe 110 d'appui en direction de sa configuration de repos. Ainsi, le relâchement de l'effort d'actionnement sur l'organe 102 de commande par l'opérateur permet au ressort de progressivement ramener l'organe 110 d'appui vers sa configuration de repos qu'il occupe lorsque l'opérateur n'exerce plus aucun effort sur l'organe 102 de commande.
- Par exemple, l'organe 111 de rappel est un ressort de torsion engagé sur l'axe A1 de rotation et présentant deux extrémités, l'une en appui contre l'une des deux coques 112a, 112b et l'autre en appui sur l'organe 110 d'appui (voir par exemple les
figures 9 et10 ). - Ce premier mode de réalisation présente l'avantage d'une simplicité de mise en oeuvre mais aussi l'avantage de préserver l'étanchéité du dispositif 200 de vissage et/ou de dévissage dans le sens où il n'y a pas à modifier ce dispositif 200 de vissage et/ou de dévissage puisque le dispositif 103 de couplage remplace, quand cela est approprié (lorsque l'effort d'actionnement susmentionné est mis en oeuvre) et lorsque le dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage, l'actionnement manuel de l'opérateur sur l'actionneur 202 de commande.
- Selon un deuxième mode de réalisation relatif à la propagation par le dispositif 103 de couplage, le dispositif 103 de couplage est configuré pour, lorsque ledit dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage, autoriser une propagation d'un signal électrique d'actionnement, lors de l'actionnement de l'organe 102 de commande, directement au dispositif 200 de vissage et/ou de dévissage.
- Par exemple, pour mettre en oeuvre ce deuxième mode de réalisation relatif à la propagation par le dispositif 103 de couplage, un câble électrique du dispositif 103 de couplage peut être relié électriquement à l'organe 102 de commande et à un connecteur appartenant au dispositif 200 de vissage et/ou de dévissage. Ainsi, l'actionnement de l'organe 102 de commande permet la propagation du signal électrique d'actionnement dans le câble électrique et suite à cette propagation, le dispositif 200 de vissage et/ou de dévissage reçoit le signal électrique d'actionnement d'où il résulte un actionnement de la fonction de manière adéquate.
- Par exemple, le signal électrique d'actionnement est généré continûment par le dispositif 200 de vissage et/ou de dévissage pour être propagé sur un circuit comprenant le connecteur, le câble électrique et un composant de l'organe 102 d'actionnement. Ce circuit présente un état ouvert lorsque l'organe 102 d'actionnement n'est pas actionné et un état fermé lorsque l'organe 102 d'actionnement est actionné. Le composant peut être un potentiomètre ou un interrupteur qui, lorsque l'organe 102 d'actionnement est actionné fait passer le circuit de l'état ouvert à l'état fermé de sorte à autoriser la propagation du signal électrique d'actionnement dans le circuit d'où il résulte l'actionnement de la fonction. Lorsque l'organe 102 d'actionnement n'est plus actionné, le circuit électrique reprend son état ouvert ce qui induit l'arrêt de la fonction par le dispositif 200 de vissage et/ou de dévissage. Dans ce cas, le câble électrique peut comprendre deux conducteurs électriques reliés en série avec interposition du composant et reliés chacun électriquement au connecteur lorsque le dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage.
- Selon un troisième mode de réalisation relatif à la propagation par le dispositif 103 de couplage, le dispositif 103 de couplage est configuré pour, lorsque ledit dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage, propager, lors de l'actionnement de l'organe 102 de commande, un signal électrique d'actionnement généré par l'accessoire 100 (notamment par l'organe 102 de commande) à un dispositif 108 d'actionnement configuré pour assurer un actionnement mécanique de l'actionneur 202 de commande suite à la réception du signal électrique de commande par le dispositif 108 d'actionnement, le dispositif 103 de couplage comprenant le dispositif 108 d'actionnement.
- Dans le cadre de ce troisième mode de réalisation relatif à la propagation par le dispositif 103 de couplage, le câble 109 peut être électrique et le dispositif 108 d'actionnement peut loger des moyens configurés pour piloter un moteur du dispositif 108 d'actionnement afin de déplacer un organe d'appui du dispositif 108 d'actionnement de sorte qu'il exerce un effort adapté sur l'actionneur 202 de commande lors de la réception du signal électrique d'actionnement par lesdits moyens configurés pour piloter le moteur.
- Par ailleurs, l'accessoire 100 (notamment l'organe 102 de commande), peut générer un signal électrique de relâchement qui est transmis au dispositif 108 d'actionnement via le câble 109 lors de l'arrêt de l'actionnement de l'organe 102 de commande afin que les moyens configurés pour piloter le moteur déplacent l'organe d'appui pour que l'actionnement de l'actionneur 202 de commande par l'organe d'appui cesse.
- Afin que le signal électrique d'actionnement ou le signal électrique de relâchement se propage de la manière souhaitée, l'organe 102 de commande peut comprendre un interrupteur ou un potentiomètre relié au câble électrique.
- Selon un quatrième mode de réalisation relatif à la propagation par le dispositif 103 de couplage, le dispositif 103 de couplage est configuré pour, lorsque ledit dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage, propager un signal radioélectrique d'actionnement généré par l'accessoire 100 (notamment par l'organe 102 de commande), lors de l'actionnement de l'organe 102 de commande, directement au dispositif 200 de vissage et/ou de dévissage. Dès lors, l'organe 102 d'actionnement peut comprendre un émetteur configuré pour émettre ledit signal radioélectrique d'actionnement, par exemple suite à l'activation d'un interrupteur ou d'un potentiomètre de l'organe 102 de commande, et le dispositif 200 de vissage et/ou de dévissage peut comprendre un récepteur configuré pour recevoir ledit signal radioélectrique d'actionnement et des moyens pour actionner la fonction lors de la réception dudit signal radioélectrique d'actionnement.
- L'accessoire 100 (notamment l'organe 102 de commande), peut générer un signal électrique de relâchement qui est transmis au dispositif 200 de vissage et/ou de dévissage lors de l'arrêt de l'actionnement de l'organe 102 de commande afin que le dispositif 200 de vissage et/ou de dévissage stoppe la fonction. A cet effet, l'émetteur peut être configuré pour émettre ledit signal radioélectrique de relâchement lors de l'arrêt de l'actionnement de l'organe 102 de commande, le récepteur peut être configuré pour recevoir ledit signal radioélectrique de relâchement, et le dispositif 200 de vissage et/ou de dévissage peut comprendre des moyens pour stopper la fonction lors de la réception dudit signal radioélectrique de relâchement par le récepteur.
- Selon un cinquième mode de réalisation relatif à la propagation par le dispositif 103 de couplage, le dispositif 103 de couplage est configuré pour propager, lorsque ledit dispositif 103 de couplage est relié au dispositif 200 de vissage et/ou de dévissage, un signal radioélectrique d'actionnement généré par l'accessoire 100 (notamment par l'organe 102 de commande), lors de l'actionnement de l'organe 102 de commande, à un dispositif d'actionnement configuré pour assurer un actionnement mécanique de l'actionneur 202 de commande suite à la réception du signal radioélectrique d'actionnement par le dispositif d'actionnement, le dispositif 103 de couplage comprenant le dispositif 108 d'actionnement. Dès lors, l'organe 102 d'actionnement peut comprendre un émetteur configuré pour émettre ledit signal radioélectrique d'actionnement lors de l'actionnement de l'organe 102 de commande, et le dispositif d'actionnement peut comprendre un récepteur configuré pour recevoir ledit signal radioélectrique d'actionnement et des moyens pour actionner mécaniquement l'actionneur 202 de commande lors de la réception dudit signal radioélectrique d'actionnement.
- L'accessoire 100 (notamment l'organe 102 de commande), peut générer un signal radioélectrique de relâchement qui est transmis au dispositif d'actionnement lors de l'arrêt de l'actionnement de l'organe 102 de commande afin que le dispositif d'actionnement stoppe l'actionnement de l'actionneur 202 de commande. A cet effet, l'émetteur peut être configuré pour émettre ledit signal radioélectrique de relâchement lors de l'arrêt de l'actionnement de l'organe 102 de commande, le récepteur peut être configuré pour recevoir ledit signal radioélectrique de relâchement et le dispositif d'actionnement peut comprendre des moyens pour stopper l'actionnement de l'actionneur 202 de commande lors de la réception dudit signal radioélectrique de relâchement.
- Les moyens pour actionner et pour stopper peuvent partager le même moteur et le même un organe d'appui, ainsi qu'un programme adapté au pilotage du moteur en fonction du signal radioélectrique de relâchement ou du signal radioélectrique d'actionnement.
- Ces premier à cinquième modes de réalisation relatifs à la propagation par le dispositif 103 de couplage sont tout particulièrement adaptés pour assurer la propagation via le dispositif 103 de couplage tout en limitant la diffusion de vibrations issues du fonctionnement du dispositif 200 de vissage et/ou de dévissage vers l'organe 102 de commande.
- Dans le cas où un câble est présent, qu'il soit électrique ou non, de préférence ce le câble chemine en partie dans la structure 104 porteuse comme cela est notamment le cas en
figures 2 à 10 où seulement des portions du câble 109 sont visibles. Cela favorise la protection du câble. - Dans le cas où le dispositif 103 de couplage comprend le dispositif 108 d'actionnement, ce dispositif 108 d'actionnement comprend l'adaptateur évoqué ci-avant et donc configuré pour être assemblé sur le dispositif 200 de vissage et/ou de dévissage au niveau de l'actionneur 202 de commande et notamment sur l'organe 201 de préhension. Comme évoqué ci-avant, cela permet d'accoupler de manière idoine le dispositif 103 de couplage au dispositif 200 de vissage et/ou de dévissage pour propager de manière efficace l'actionnement de l'organe 102 de commande à l'actionneur 202 de commande sans préjudice à l'intégrité du dispositif 200 de vissage et/ou de dévissage. Notamment, dans le cadre de l'ensemble 300, cet adaptateur est monté, par exemple à l'aide de vis, sur le dispositif 200 de vissage et/ou de dévissage.
- Notamment, comme le montrent à titre d'exemple les
figures 2 ,3 ,5 ,6 ,7 et9 à 12, la structure 104 porteuse comprend un châssis, par exemple tubulaire, comprenant deux longerons 104a, 104b sur lesquels le système 105 de couplage est monté, par exemple par fixation à l'aide de vis. Le châssis tel qu'illustré adopte la forme générale d'une ossature de type parallélépipède rectangle. Le châssis forme notamment une cage au sein de laquelle est monté le dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée. La structure 104 porteuse peut être en acier, tout comme l'organe 107 d'orientation et l'élément 120 allongé. - Comme évoqué ci-avant, le système 105 de couplage permet à la fois de solidariser, dans la configuration assemblée, l'accessoire 100 et le dispositif 200 de vissage et/ou de dévissage entre eux, et d'assurer un découplage vibratoire adapté entre la structure 104 porteuse et le dispositif 200 de vissage et/ou de dévissage. A cet effet, il existe un besoin d'assurer cela de manière fiable, peu coûteuse et démontable.
- Dès lors, pour satisfaire ce besoin, le système 105 de couplage peut comprendre une bride 113 de serrage configurée pour, dans la configuration assemblée, enserrer le dispositif 200 de vissage et/ou de dévissage. Bien entendu, du point de vue de l'ensemble 300 comprenant l'accessoire 100 et le dispositif 200 de vissage et/ou de dévissage la bride 113 de serrage enserre le dispositif 200 de vissage et/ou de dévissage. Cette bride 113 de serrage peut comprendre une configuration fermée (
figure 11 ) et peut comprendre une configuration ouverte (figure 12 ). La bride 113 de serrage peut varier entre sa configuration ouverte et sa configuration fermée. - Toujours dans le but d'améliorer le maintien du dispositif 200 de vissage et/ou de dévissage, le système 105 de couplage peut comprendre un dispositif 114 de serrage, distinct de la bride 113 de serrage, configuré pour, dans la configuration assemblée, enserrer le dispositif 200 de vissage et/ou de dévissage. Ainsi, en complément de la bride 113 de serrage, cela permet d'attacher le dispositif 200 de vissage et/ou de dévissage à la structure 104 porteuse selon plusieurs zones d'attache (via la bride 113 de serrage et le dispositif 114 de serrage) d'où il résulte un bon maintien dans la configuration assemblée. Bien entendu, du point de vue de l'ensemble 300 comprenant l'accessoire 100 et le dispositif 200 de vissage et/ou de dévissage, le dispositif 114 de serrage enserre le dispositif 200 de vissage et/ou de dévissage. Ce dispositif 114 de serrage peut comprendre une configuration fermée (
figure 11 ) et peut comprendre une configuration ouverte (figure 12 ). Le dispositif 114 de serrage peut varier entre sa configuration ouverte et sa configuration fermée. - Il a été décrit l'utilisation de la bride 113 de serrage seule ou avec le dispositif 114 de serrage. En fait, la bride 113 de serrage et le dispositif 114 de serrage ont la même fonction, i.e. participer au maintien du dispositif 200 de vissage et/ou de dévissage par rapport à la structure 104 porteuse, et leur nombre respectif n'est pas limité à un dans le sens où il peut être adapté en fonction du facteur de forme du dispositif 200 de vissage et/ou de dévissage afin d'assurer un maintien idoine.
- Afin de limiter les vibrations perçues au sein de la structure 104 porteuse, le système 105 de couplage peut être configuré de sorte à assurer un premier découplage vibratoire au niveau d'une région d'accueil du dispositif 200 de vissage et/ou de dévissage au sein de la bride 113 de serrage et un deuxième découplage vibratoire entre la bride 113 de serrage et la structure 104 porteuse. Cela permet aussi d'assurer un bon maintien du dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée. La région d'accueil correspond notamment à l'emplacement d'une partie du dispositif 200 de vissage et/ou de dévissage enserrée par la bride 113 de serrage dans la configuration assemblée. Autrement dit, l'ensemble 300 comprenant l'accessoire 100 et le dispositif 200 de vissage et/ou de dévissage est notamment tel que la bride 113 de serrage assure le premier découplage vibratoire notamment au contact de la bride 113 de serrage avec le dispositif 200 de vissage et/ou de dévissage, et le deuxième découplage vibratoire.
- Il résulte de ce qui a été décrit ci-avant un besoin de mettre en place un découplage vibratoire efficient. A cet effet, le système 105 de couplage peut comprendre au moins un organe 115a, 115b, 115c, 115d d'amortissement configuré pour s'opposer, dans la configuration assemblée, à la transmission de vibrations entre la structure 104 porteuse et le dispositif 200 de vissage et/ou de dévissage. C'est l'amorti conféré par l'organe 115a, 115b, 115c, 115d d'amortissement qui permet notamment de limiter la transmission de vibrations susmentionnée. La
figure 11 , est une figure partielle de l'accessoire 100 qui illustre un mode de réalisation particulier du système 105 de couplage tel qu'il est visible auxfigures 2 à 8 . - Tout ce qui s'applique à l'organe 115a, 115b, 115c, 115d d'amortissement peut s'appliquer aux organes 115a, 115b, 115c, 115d d'amortissement lorsqu'il y en a plusieurs.
- En fait, l'organe 115a, 115b, 115c, 115d d'amortissement est aussi appelé dans le domaine technique de l'invention organe antivibratoire.
- En particulier, l'organe 115a, 115b, 115c, 115d d'amortissement peut être choisi parmi : un plot antivibratoire, un système à ressort, un vérin à gaz. Lorsque le système 105 de couplage comprend plusieurs organes 115a, 115b, 115c, 115d d'amortissement, différents types de ces derniers issus de la liste évoquée dans le présent paragraphe peuvent être combinés.
- Le plot antivibratoire peut être en toute matière adaptée pour absorber les vibrations, par exemple cette matière peut être choisie parmi : un caoutchouc, un élastomère, un polyuréthane.
- Par exemple, le système 105 de couplage comprend une pluralité d'organes 115a, 115b, 115c, 115d d'amortissement, cela permet par exemple de répartir de manière adaptée l'amortissement et donc d'ajuster le découplage vibratoire recherché.
- Par exemple, un ou plusieurs de ces organes 115a, 115b, 115c, 115d d'amortissement sont agencés pour être au contact du dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée. Cela permet un amortissement satisfaisant. En
figures 11 , quatre organes 115a d'amortissement sont agencés pour être au contact du dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée ; cela permet une répartition adaptée autour du dispositif 200 de vissage et/ou de dévissage afin de participer à son maintien tout en limitant la transmission de vibrations en direction de la structure 104 porteuse. - Outre assurer un maintien satisfaisant, l'utilisation de plusieurs organes 115a d'amortissement au contact du dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée permet d'éviter un arrachement desdits organes 115a d'amortissement. En effet, si on ne mettait par exemple qu'un seul organe 115a d'amortissement par exemple de type plot antivibratoire, il travaillerait par exemple en compression en vissage et mais en tension en dévissage. Les organes d'amortissement de type plot antivibratoire ont généralement une très mauvaise tenue à l'arrachement. L'avantage d'avoir plusieurs plots antivibratoires situés de part et d'autre du dispositif 200 de vissage et/ou de dévissage est d'avoir une tenue en compression sur au moins un plot antivibratoire quel que soit le sens de travail, i.e. vissage ou dévissage, du dispositif 200 de vissage et/ou de dévissage.
- Ainsi, le système 105 de couplage peut comprendre plusieurs organes 115a d'amortissement formés chacun par un plot antivibratoire. Dans la configuration assemblée, ces organes 115a d'amortissement sont en contact avec le dispositif 200 de vissage et/ou de dévissage et sont répartis autour du dispositif 200 de vissage et/ou de dévissage de sorte que, lors d'une utilisation de l'ensemble 300 (i.e. lorsque la fonction, par exemple la rotation du moteur 203 induisant une rotation de l'arbre 204 du dispositif 200 de vissage et/ou de dévissage dans le premier sens de rotation S1 ou dans le deuxième sens de rotation S2, est activée), au moins un de ces organes 115a d'amortissement travaille en compression et au moins un autre de ces organes 115a d'amortissement travaille en tension ; cela permet d'améliorer l'amorti général en absorbant les vibrations dans différentes directions.
- Selon une réalisation particulière, la bride 113 de serrage présente la configuration fermée (
figure 10 ), par exemple à l'aide d'une ou de plusieurs vis 131, dans laquelle deux parties 116a, 116b de la bride 113 de serrage sont sollicitées l'une en direction de l'autre avec interposition d'au moins un premier organe 115b d'amortissement de la pluralité d'organes 115a, 115b, 115c, 115d d'amortissement. Par ailleurs, dans ce cas, la bride 113 de serrage peut aussi comprendre au moins un deuxième organe 115a d'amortissement de la pluralité d'organes 115a, 115b, 115c, 115d d'amortissement, ledit deuxième organe 115a d'amortissement étant configuré pour, dans la configuration fermée de la bride 113 de serrage (figure 11 ) et dans la configuration assemblée (figures 3 et7 ), être au contact du dispositif 200 de vissage et/ou de dévissage afin de participer au maintien du dispositif 200 de vissage et/ou de dévissage dans la bride 113 de serrage, et donc notamment par rapport à la structure 104 porteuse, dans où le dispositif 200 de vissage et/ou de dévissage est enserré par la bride 113 de serrage notamment via un contact d'un ou de plusieurs deuxièmes organes 115a d'amortissement avec le dispositif 200 de vissage et/ou de dévissage. La bride 113 de serrage est reliée à la structure 104 porteuse au moins par l'intermédiaire d'au moins un troisième organe 115c d'amortissement de la pluralité d'organes 115a, 115b, 115c, 115d d'amortissement. Cela permet d'étager l'amortissement via un premier étage (via le ou les deuxièmes organes 115a d'amortissement) directement au contact du dispositif 200 de vissage et/ou de dévissage, un deuxième étage (via le ou les premiers organes 115b d'amortissement) au sein de la bride 113 de serrage et un troisième étage (via le ou les troisièmes organes 115c d'amortissement) entre la bride 113 de serrage et la structure 104 porteuse, afin de limiter la transmission de vibrations à la structure 104 porteuse. - De préférence, les deux parties 116a, 116b de la bride 113 de serrage sont formées par deux pièces distinctes, comme le montre la
figure 11 . Ainsi, ces deux pièces peuvent être assemblées, dans la configuration fermée de la bride 113, au moins par l'intermédiaire de deux premiers organes 115b d'amortissement de la pluralité d'organes 115a, 115b, 115c, 115d d'amortissement agencés aux extrémités longitudinales opposées desdites deux pièces de sorte à former un collier de serrage dans la configuration fermée de la bride 113 de serrage. - Alternativement, et de manière non illustrée, les deux parties 116a, 116b de la bride 113 de serrage peuvent correspondre à deux extrémités longitudinales opposées d'une même pièce de la bride 113 de serrage formant collier de serrage. La configuration fermée de la bride 113 de serrage correspond alors à un état où les deux extrémités longitudinales sont fixées entre elles avec interposition du premier organe 115b d'amortissement.
- De préférence, la bride 113 de serrage comprend plusieurs deuxièmes organes 115a d'amortissement, par exemple au nombre de quatre comme illustré en
figure 11 . Le cas échéant, ces deuxièmes organes 115a d'amortissement sont répartis sur les deux parties 116a, 116b formant deux pièces distinctes ou sur la pièce formant collier de serrage de sorte à permettre le travail, simultanément de certains d'entre eux en tension et d'autres en compression comme évoqué ci-avant lorsqu'il s'agit de plots antivibratoires. - En particulier, la bride 113 de serrage présente deux points de montage à la structure 104 porteuse de sorte que la bride 113 de serrage est fixée à chacun des deux longerons 104a, 104b de la structure 104 porteuse.
- De préférence, la bride 113 de serrage est reliée à la structure 104 porteuse, notamment au moins par l'intermédiaire de deux troisièmes organes 115c d'amortissement de la pluralité d'organes 115a, 115b, 115c, 115d d'amortissement solidaires de la partie 116b de la bride 113 de serrage en
figure 11 ou de la pièce formant collier de serrage. - Bien entendu, la bride 114 de serrage peut comprendre la configuration ouverte qui permet d'installer dans, ou de retirer de, la bride 114 de serrage le dispositif 200 de vissage et/ou de dévissage. Cette configuration ouverte est notamment illustrée en
figure 12 . - Si le dispositif 200 de vissage et/ou de dévissage est pourvu de trous 209 filetés comme représenté par exemple en
figure 1 , il peut être prévu que certains des deuxièmes organes 115a d'amortissement venant au contact du dispositif 200 de vissage et/ou de dévissage au niveau de ces trous soient associés à des vis 130 alors vissées dans le dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée de sorte à améliorer le maintien du dispositif 200 de vissage et/ou de dévissage par rapport à la structure 104 porteuse. - Dans le cas où le système 105 de couplage comprend le dispositif 114 de serrage, ce dispositif 114 de serrage peut comprendre deux parties 117a, 117b configurées pour être sollicitées, dans la configuration fermée du dispositif 114 de serrage (voir
figure 11 ), l'une en direction de l'autre de sorte à enserrer localement, dans la configuration assemblée, le dispositif 200 de vissage et/ou de dévissage. L'une desdites deux parties 117a, 117b étant fixée à la structure 104 porteuse au moins par l'intermédiaire d'au moins un des organes 115d d'amortissement de la pluralité d'organes 115a, 115b, 115c, 115d d'amortissement. - De préférence, les deux parties 117a, 117b du dispositif 114 de serrage sont formées par deux pièces distinctes, comme le montre la
figure 11 . Ainsi, ces deux pièces peuvent être assemblées, dans la configuration fermée du dispositif 114 de serrage par l'intermédiaire de deux vis 118a, 118b de sorte à former un collier de serrage. - Alternativement, et de manière non illustrée, les deux parties 117a, 117b du dispositif 114 de serrage peuvent correspondre à deux portions d'une même pièce du dispositif 114 de serrage conformées pour un collier de serrage. La configuration fermée du dispositif 114 de serrage correspond alors à un état où localement ces deux parties 117a, 117b du dispositif 114 de serrage sont fixées entre elles par exemple à l'aide d'une vis.
- En particulier, le dispositif 114 de serrage présente deux points de montage à la structure 104 porteuse de sorte que la bride 113 de serrage est fixée à chacun des deux longerons 104a, 104b par exemple à l'aide de vis 132.
- De préférence, le dispositif 114 de serrage, et plus particulièrement sa partie 117b, est relié à la structure 104 porteuse au moins par l'intermédiaire de deux quatrièmes organes 115d d'amortissement de la pluralité d'organes 115a, 115b, 115c, 115d d'amortissement solidaires de la partie 117b en
figure 11 ou de la pièce formant collier de serrage du dispositif 114 de serrage. - Bien entendu, le dispositif 114 de serrage peut comprendre la configuration ouverte qui permet d'installer dans le, ou de retirer du, dispositif 114 de serrage le dispositif 200 de vissage et/ou de dévissage. Cette configuration ouverte est notamment illustrée en
figure 12 . - Selon un mode de réalisation, dans lequel le dispositif 200 de vissage et/ou de dévissage, destiné à être assemblé avec l'accessoire 100, comprend le moteur 203, le mécanisme 206 à chocs et la partie 208 de liaison reliant le moteur 203 et le mécanisme 206 à chocs (
figure 1 ), l'accessoire 100 peut être tel que la bride 114 de serrage est conformée pour être montée sur une partie du dispositif 200 de vissage et/ou de dévissage choisie parmi : - la partie 208 de liaison ;
- le moteur 203 ;
- le mécanisme 206 à chocs ;
- Cela permet à la bride 113 de serrage d'assurer un amortissement adapté à proximité de la source des vibrations du dispositif 200 de vissage et/ou de dévissage, notamment à l'aide des organes 115a, 115b, 115c d'amortissement (les premier(s), deuxième(s) et troisième(s) organes d'amortissement) tels que décrits ci-avant.
- Ainsi, la bride 113 de serrage peut être conformée pour entourer ladite partie du dispositif 200 de vissage et/ou de dévissage.
- Dans le cadre de l'ensemble 300, la bride 113 de serrage est montée sur la partie du dispositif 200 de vissage et/ou de dévissage, et le dispositif 114 de serrage est monté au niveau de l'organe 201 de préhension, notamment sur, et plus particulièrement au travers de (
figures 3 et7 ), l'organe 201 de préhension. - Comme évoqué en partie état de la technique, la voie ferrée 1000 peut comprendre deux rails 1001, 1002 reliés entre eux par des traverses 1003 échelonnées selon la longueur des rails 1001, 1002 comme le montrent par exemple les
figures 4 et8 . Les rails 1001, 1002 sont fixés aux traverses 1003 via des premières attaches 1004, aussi appelées tirefonds. Chacun des deux rails 1001, 1002 peut être formé d'une pluralité de portions 1006a, 1006b de rail fixées entre elles, deux portions 1006a, 1006b de rail consécutives peuvent être fixées entre elles via une éclisse 1007 et des deuxièmes attaches 1005 fixant l'éclisse 1007 auxdites deux portions 1006a, 1006b de rail. A cet effet, l'accessoire 100 peut comprendre une première configuration et une deuxième configuration permettant d'orienter de manière adaptée le dispositif 200 de vissage et/ou de dévissage que l'opérateur veuille visser ou dévisser une deuxième attache 1005 ou une première attache 1004. La première configuration de l'accessoire 100, aussi appelée configuration d'éclissage (figures 2 à 4 ), implique que la direction de vissage ou de dévissage du dispositif 200 de vissage et/ou de dévissage est adaptée à la direction axiale du corps de la deuxième attache 1005 pour permettre le vissage ou le dévissage de la deuxième attache 1005. La deuxième configuration de l'accessoire 100, aussi appelée configuration de tirefonnage (figures 5 à 8 ), implique que la direction de vissage ou de dévissage du dispositif 200 de vissage et/ou de dévissage est adaptée à la direction axiale du corps de la première attache 1004 pour permettre le vissage ou le dévissage de la première attache 1004. - Par exemple, la première configuration de l'accessoire 100 est telle qu'elle permet de positionner l'arbre 204a du dispositif 200 de vissage et/ou de dévissage selon une direction parallèle, ou formant un angle compris entre +25 degrés ou -25 degrés, par rapport à un plan de roulement sur la voie ferrée au niveau de la deuxième attache 1005 à visser ou dévisser.
- Par exemple, la deuxième configuration de l'accessoire 100 est telle qu'elle permet de positionner l'arbre 204a du dispositif 200 de vissage et/ou de dévissage selon une direction orthogonale, ou formant un angle compris entre +65 degrés ou +115 degrés, par rapport au plan de roulement sur la voie ferrée au niveau de la première attache 1004 à visser ou dévisser.
- Par « plan de roulement », il est entendu le plan dans lequel un véhicule ou chariot se déplace localement à l'aplomb de (et donc notamment sur) la voie ferrée.
- Par « compris entre deux valeurs », il est entendu dans la présente description que ces deux valeurs forment les bornes d'une plage correspondante pour laquelle les deux valeurs sont incluses.
- Dès lors, il existe un besoin de faciliter le travail de l'opérateur. Ceci est notamment rendu possible grâce à la présence de l'accessoire 100 qu'il est avantageusement possible de fonctionnaliser pour réaliser ceci.
- Pour satisfaire ce besoin, l'accessoire 100 comprend préférentiellement l'interface 106 de manipulation montée selon au moins un degré de mobilité, par exemple montée à pivotement, par rapport à la structure 104 porteuse. L'accessoire 100 comprend alors préférentiellement un mécanisme 118 d'indexation configuré pour autoriser le positionnement de l'interface 106 de manipulation par rapport à la structure 104 porteuse selon au moins deux positions relatives prédéfinies différentes, ledit mécanisme 118 d'indexation étant configuré de sorte à présenter :
- une première configuration (par exemple telle que visible en
figure 2 à 8 et13 ), aussi dite configuration engagée, dans laquelle ledit mécanisme 118 d'indexation maintient le positionnement de l'interface 106 de manipulation par rapport à la structure 104 porteuse lorsque le positionnement relatif entre l'interface 106 de manipulation et la structure 104 porteuse est dans l'une quelconque des positions relatives prédéfinies ; - une deuxième configuration (par exemple telle que visible en
figures 14 et15 ), dite configuration désengagée, dans laquelle le degré de mobilité de l'interface 106 de manipulation par rapport à la structure 104 porteuse est autorisé. - En fait, la première configuration du mécanisme 118 d'indexation s'oppose au changement de position relative prédéfinie par exemple en interdisant/empêchant le degré de mobilité (nonobstant un simple jeu fonctionnel possible). La deuxième configuration du mécanisme 118 d'indexation permet le degré de mobilité de sorte à permettre le changement de position relative prédéfinie.
- Selon un perfectionnement, le mécanisme 118 d'indexation comprend un organe 119 de rappel, tel qu'un ressort configuré pour faire varier le mécanisme 118 d'indexation automatiquement depuis sa deuxième configuration vers sa première configuration lorsque le positionnement relatif entre l'interface 106 de manipulation et la structure 104 porteuse correspond à l'une quelconque des positions relatives prédéfinies. Cela permet par exemple à l'opérateur désireux de changer le positionnement relatif prédéfini de l'interface 106 de manipulation par rapport à la structure 104 porteuse de l'initier manuellement sans avoir à se soucier après du retour à la première configuration du mécanisme 118 d'indexation : il peut alors se concentrer sur autre chose.
- Par exemple, l'interface 106 de manipulation est telle que l'élément 120 allongé est monté à pivotement selon un axe A2 de pivotement par rapport à la structure 104 porteuse (voir par exemple les
figures 13 à 15 ). L'élément 120 allongé peut être un tube creux. - Par exemple, l'accessoire 100 comprend deux platines 121a, 121b sur lesquelles l'axe A2 de pivotement est monté. Ces deux platines 121a, 121b sont fixées à la structure 104 porteuse par tout moyen adapté comme par exemple par soudure sur la structure 104 porteuse. L'axe A2 de pivotement traverse l'élément 120 allongé et relie les deux platines 121a, 121b. L'élément 120 allongé passe entre les deux platines 121a, 121b.
- L'accessoire 100 peut comprendre une entretoise 122 qui sépare les deux platines 121a, 121b et maintient leur écartement. Avantageusement, cette entretoise 122 comprend une première empreinte 134 et une deuxième empreinte 135, par exemple adoptant chacune la forme d'une gorge rectiligne ouverte à ses deux extrémités longitudinales opposées, configurées chacune pour recevoir une portion de l'élément 120 allongé. La première empreinte 134 recevant la portion de l'élément 120 allongé dans la première configuration de l'accessoire 100 (configuration d'éclissage) et la deuxième empreinte 135 recevant la portion de l'élément 120 allongé dans la deuxième configuration de l'accessoire 100 (configuration de tirefonnage). Ainsi, lorsque la première empreinte 134 reçoit la portion de l'élément 120 allongé elle participe au maintien de l'élément 120 allongé et lorsque la deuxième empreinte 135 reçoit la portion de l'élément 120 allongé elle participe au maintien de l'élément 120 allongé. Cela permet à l'accessoire 100 de mieux résister aux vibrations résiduelles et aux efforts qu'il subit lors de son utilisation.
- De préférence, le mécanisme 118 d'indexation comprend :
- un bouton 123 d'actionnement ;
- l'organe 119 de rappel ;
- un élément 124 d'appui ;
- une tige 125 montée à coulissement dans le tube creux et au bout de laquelle, au niveau de/du coté de l'interface 106 de manipulation, est monté le bouton 123 d'actionnement, la tige 125 étant percée d'un trou 126 oblong traversé par l'axe A2 de pivotement de sorte à ce que ledit axe A2 de pivotement ne s'oppose pas au coulissement de la tige 125 dans le tube creux au moins selon une amplitude prédéfinie de coulissement de la tige 125 dans le tube creux ;
- un axe A3 solidaire de la tige 125 lors de son coulissement dans le tube 120 creux, ledit axe A3 traversant le tube 120 creux au niveau de deux ouvertures oblongues (non visibles sur les figures) opposées et définissant par exemple l'amplitude de coulissement de la tige 125 dans le tube 120 creux ;
- des éléments 127 de guidage ménagés dans les platines 121a, 121b (chaque platine 121a, 121b comprend un des éléments 127 de guidage correspondant), chaque élément 127 de guidage comprenant une glissière 128 arquée pour guider l'axe A3 du mécanisme 118 d'indexation lors du pivotement du tube creux, et des encoches 129 formées à la périphérie de la glissière 128 et débouchant dans cette dernière de sorte que : le passage de la deuxième configuration du mécanisme 118 d'indexation à la première configuration du mécanisme 118 d'indexation s'accompagne, pour chaque élément 127 de guidage, de l'insertion de l'axe A3 du mécanisme 118 d'indexation dans une des encoches 129 dudit élément 127 de guidage depuis la glissière 128 dudit élément 127 de guidage ; et que le passage de la première configuration du mécanisme 118 d'indexation à la deuxième configuration du mécanisme 118 d'indexation s'accompagne, pour chaque élément 127 de guidage, du passage de l'axe A3 du mécanisme 118 d'indexation de l'encoche 129 dudit élément 127 de guidage dans laquelle il était inséré vers la glissière 128 dudit élément 127 de guidage.
- Notamment, à l'opposé du bouton 123 d'actionnement, l'extrémité de la tige 125 coopère avec l'organe 119 de rappel, tel qu'un ressort de compression, par exemple constamment comprimé entre ladite extrémité de la tige 125 et l'élément 124 d'appui. Cet élément 124 d'appui peut être un bouchon venant obturer le tube creux à l'opposé de l'interface 106 de manipulation.
- Dès lors, la manipulation du mécanisme 118 d'indexation peut être selon la cinématique suivante. L'axe A3 du mécanisme 118 d'indexation est engagé dans deux encoches 129 d'où il résulte que le maintien de la position relative prédéfinie de l'interface 106 de manipulation par rapport à la structure 104 porteuse est assuré. Lors d'un appui de l'opérateur sur le bouton 123 d'actionnement cela va enfoncer la tige 125 dans le tube creux où elle va coulisser jusqu'à ce que l'axe A3 du mécanisme 118 d'indexation passe des encoches 129 aux glissières 128 (passage de la première configuration du mécanisme 118 d'indexation à la deuxième configuration du mécanisme 118 d'indexation) d'où il résulte que le pivotement de l'interface 106 de manipulation est autorisé. L'opérateur n'a alors plus qu'à faire pivoter l'interface 106 de manipulation et dès que l'axe A3 du mécanisme 118 d'indexation n'est plus en regard des encoches 129 qu'il vient de quitter l'opérateur n'a plus à se soucier du bouton 123 d'actionnement car la coopération avec les glissières 128 lors du pivotement maintien l'organe 119 de rappel comprimé. Lorsque le pivotement est tel que l'axe A3 du mécanisme 118 d'indexation arrive à l'entrée de deux encoches 129 respectivement des deux platines 121a, 121b, l'organe 119 de rappel va pousser la tige 125 et donc l'axe A3 du mécanisme 118 d'indexation pour que la tige 125 coulisse à nouveau et que l'axe A3 du mécanisme 118 d'indexation s'engage dans lesdites deux encoches 129 d'où il résulte un passage automatique du mécanisme 118 d'indexation à la première configuration, maintenant ainsi la nouvelle position relative prédéfinie de l'interface 106 de manipulation par rapport à la structure 104 porteuse. Ainsi, l'amplitude de coulissement de la tige 125 dans le tube creux est notamment choisie de sorte à permettre la variation entre la première configuration du mécanisme 118 d'indexation et la deuxième configuration du mécanisme 118 d'indexation.
- Sur les
figures 13 à 15 , il est possible de visualiser, pour chaque élément 127 de guidage, la présence de trois encoches 129 le long de la glissière 128. Les encoches 129 opposées et respectivement proximales chacune de l'une des extrémités longitudinales de la glissière 128 sont les encoches 129 l'une associée à la première configuration de l'accessoire 100 et l'autre associée à la deuxième configuration de l'accessoire 100. Pour chaque élément 127 de guidage, l'encoche 129 située entre lesdites deux encoches 129 opposées correspond à une encoche 129 dans laquelle est engagé l'axe A3 du mécanisme 118 d'indexation dans une configuration intermédiaire (non représentée) permettant de donner un angle particulier au dispositif 200 de vissage et/ou de dévissage afin de s'adapter à certaines situations où l'attache à visser ou à dévisser serait de travers par rapport au plan de roulement sur la voie ferrée localement à cette attache. - Les glissières 128 peuvent conditionner l'amplitude du degré de mobilité.
- Selon un mode de réalisation particulier, l'ensemble 300 comprend un chariot 301 (
figures 4 et8 ), le chariot 301 comprenant un système 302 de roulage pour rouler sur les rails 1001, 1002 de la voie 1000 ferrée, notamment à entretenir, et un bras 303 articulé au bout duquel est monté l'accessoire 100. Notamment, ce bras 303 articulé est monté sur le l'élément 120 allongé de sorte que l'orientation de la structure 104 porteuse puisse être réalisée afin de permettre le passage en configuration d'éclissage ou de tirefonnage tout en maintenant la ou les poignées 101 de manipulation à hauteur adaptée pour l'opérateur. - Le bras 303 articulé peut comprendre un moyen pour soulager le poids de l'accessoire 100 et du dispositif 200 de vissage et/ou de dévissage, tel qu'un vérin.
- Le système 302 de roulage peut comprendre au moins une roue 304 pour rouler sur l'un des deux rails 1002 et au moins une roue 305 pour rouler sur l'autre 1001 des deux rails. Un châssis 306 du système 302 de roulage peut relier les roues 304, 305.
- Selon un mode de réalisation, l'accessoire 100 comprend un organe 133 antibruit destiné à coopérer avec le dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée en vue d'atténuer le bruit de fonctionnement du dispositif 200 de vissage et/ou de dévissage. Sur la
figure 16 , représentant l'ensemble 300, cet organe 133 antibruit est présent et coopère avec le dispositif 200 de vissage et/ou de dévissage par exemple en entourant partiellement ce dernier. - L'organe 133 antibruit peut être un manchon ou un revêtement particulier placé autour du dispositif 200 de vissage et/ou de dévissage dans la configuration assemblée.
- Selon une réalisation, si le dispositif 200 de vissage et/ou de dévissage comprend des patins d'appui pour le reposer au sol, la bride 113 de serrage et/ou le dispositif 114 de serrage peuvent venir, dans la configuration assemblée, au contact d'une partie de ces patins d'appui ou de ces patins d'appui de sorte que, dans la configuration assemblée, tout ou partie des patins d'appui participent au découplage vibratoire.
- L'accessoire 100 peut comprendre des éléments 140 d'appui au sol (
figure 2 ) par exemple au nombre de quatre et montés sur la structure 104 porteuse. Ces éléments 140 d'appui permette de poser l'accessoire 100 sur le sol sans l'abimer. - La présente invention trouve clairement une application industrielle dans le domaine ferroviaire et notamment dans l'entretien des voies ferrées.
Claims (14)
- Accessoire (100) pour un dispositif (200) de vissage et/ou de dévissage pour attache de voie ferrée, le dispositif (200) de vissage et/ou de dévissage comprenant :• un organe (201) de préhension ;• un actionneur (202) de commande pour commander une fonction du dispositif (200) de vissage et/ou de dévissage ;l'accessoire (100) comprenant :• une poignée (101) de manipulation ;• un organe (102) de commande ;• un dispositif (103) de couplage relié à l'organe (102) de commande et configuré pour être relié au dispositif (200) de vissage et/ou de dévissage pour propager un actionnement de l'organe (102) de commande au dispositif (200) de vissage et/ou de dévissage ;• une structure (104) porteuse solidaire de la poignée (101) de manipulation et de l'organe (102) de commande ;• un système (105) de couplage configuré pour permettre d'assembler de manière démontable le dispositif (200) de vissage et/ou de dévissage à la structure (104) porteuse et pour assurer, dans une configuration assemblée du dispositif (200) de vissage et/ou de dévissage à la structure (104) porteuse, un découplage vibratoire entre la poignée (101) de manipulation et l'organe (201) de préhension.
- Accessoire (100) selon la revendication 1, dans lequel le dispositif (103) de couplage est configuré pour, lorsque ledit dispositif (103) de couplage est relié au dispositif (200) de vissage et/ou de dévissage :• propager mécaniquement l'actionnement de l'organe (102) de commande à l'actionneur (202) de commande ; ou• autoriser une propagation d'un signal électrique de commande, lors de l'actionnement de l'organe (102) de commande, directement au dispositif (200) de vissage et/ou de dévissage ; ou• propager, lors de l'actionnement de l'organe (102) de commande, un signal électrique de commande généré par l'accessoire (100) à un dispositif (108) d'actionnement configuré pour assurer un actionnement mécanique de l'actionneur (202) de commande suite à la réception du signal électrique de commande par ledit dispositif (108) d'actionnement, le dispositif (103) de couplage comprenant le dispositif (108) d'actionnement ; ou• propager un signal radioélectrique d'actionnement généré par l'accessoire (100), lors de l'actionnement de l'organe (102) de commande, directement au dispositif (200) de vissage et/ou de dévissage ;• propager un signal radioélectrique d'actionnement généré par l'accessoire (100), lors de l'actionnement de l'organe (102) de commande, à un dispositif d'actionnement configuré pour assurer un actionnement mécanique de l'actionneur (202) de commande suite à la réception du signal électrique d'actionnement par ledit dispositif d' actionnement, le dispositif (103) de couplage comprenant le dispositif d'actionnement.
- Accessoire (100) selon l'une quelconque des revendications 1 à 2, dans lequel le système (105) de couplage comprend une bride (113) de serrage configurée pour, dans la configuration assemblée, enserrer le dispositif (200) de vissage et/ou de dévissage.
- Accessoire (100) selon la revendication 3, dans lequel le système (105) de couplage comprend un dispositif (114) de serrage, distinct de la bride (113) de serrage, configuré pour, dans la configuration assemblée, enserrer le dispositif (200) de vissage et/ou de dévissage.
- Accessoire (100) selon l'une quelconque des revendications 3 à 4, dans lequel le système (105) de couplage est configuré de sorte à assurer un premier découplage vibratoire au niveau d'une région d'accueil du dispositif (200) de vissage et/ou de dévissage au sein de la bride (113) de serrage et un deuxième découplage vibratoire entre la bride (113) de serrage et la structure (104) porteuse.
- Accessoire (100) selon l'une quelconque des revendications 1 à 5, dans lequel le système (105) de couplage comprend au moins un organe (115a, 115b, 115c, 115d) d'amortissement configuré pour s'opposer, dans la configuration assemblée, à la transmission de vibrations entre le dispositif (200) de vissage et/ou de dévissage et la structure (104) porteuse.
- Accessoire (100) selon la revendication 6, dans lequel le système (105) de couplage comprend une pluralité d'organes (115a, 115b, 115c, 115d) d'amortissement.
- Accessoire (100) selon la revendication 7 et l'une quelconque des revendications 4 à 5, dans lequel :• la bride (113) de serrage présente une configuration fermée dans laquelle deux parties (116a, 116b) de la bride (113) de serrage sont sollicitées l'une en direction de l'autre avec interposition d'au moins un premier organe (115b) d'amortissement de la pluralité d'organes (115a, 115b, 115c, 115d) d'amortissement ;• la bride (113) de serrage comprend au moins un deuxième organe (115a) d'amortissement de la pluralité de d'organes (115a, 115b, 115c, 115d) d'amortissement, ledit deuxième organe (115a) d'amortissement étant configuré pour, dans la configuration fermée de la bride (113) de serrage et dans la configuration assemblée, être au contact du dispositif (200) de vissage et/ou de dévissage afin de participer au maintien du dispositif (200) de vissage et/ou de dévissage dans la bride (113) de serrage ;• la bride (113) de serrage est reliée à la structure (104) porteuse au moins par l'intermédiaire d'au moins un troisième organe (115c) d'amortissement de la pluralité d'organes (115a, 115b, 115c, 115d) d'amortissement.
- Accessoire (100) selon la revendication 4 et l'une quelconque des revendications 7 à 8 ou selon les revendications 4 et 5 et l'une quelconque des revendications 7 à 8, dans lequel le dispositif (114) de serrage comprend deux parties (117a, 117b) configurées pour être sollicitées, dans une configuration fermée du dispositif (114) de serrage, l'une en direction de l'autre de sorte à enserrer localement, dans la configuration assemblée, le dispositif (200) de vissage et/ou de dévissage, l'une desdites deux parties (117a, 117b) étant fixée à la structure (104) porteuse au moins par l'intermédiaire d'au moins un des organes (115d) d'amortissement de la pluralité d'organes (115a, 115b, 115c, 115d) d'amortissement.
- Accessoire (100) selon les revendications 8 et 9, dans lequel le dispositif (200) de vissage et/ou de dévissage, destiné à être assemblé avec l'accessoire (100), comprend un moteur (203), un mécanisme (206) à chocs et une partie (208) de liaison reliant le moteur (203) et le mécanisme (206) à chocs, et dans lequel :• la bride (113) de serrage est conformée pour être montée sur une partie du dispositif (200) de vissage et/ou de dévissage choisie parmi :∘ la partie (208) de liaison ;∘ le moteur (203) ;∘ le mécanisme (206) à chocs ;• le dispositif (114) de serrage est conformé pour être monté au niveau de l'organe (201) de préhension.
- Accessoire (100) selon l'une quelconque des revendications 1 à 10, comprenant une interface (106) de manipulation, l'interface (106) de manipulation comprenant l'organe (102) de commande et la poignée (101) de manipulation, l'interface (106) de manipulation étant montée selon au moins un degré de mobilité par rapport à la structure (104) porteuse, l'accessoire (100) comprenant un mécanisme (118) d'indexation configuré pour autoriser le positionnement de l'interface (106) de manipulation par rapport à la structure (104) porteuse selon au moins deux positions relatives prédéfinies différentes, ledit mécanisme (118) d'indexation étant configuré de sorte à présenter :• une première configuration dans laquelle il maintient le positionnement de l'interface (106) de manipulation par rapport à la structure (104) porteuse lorsque le positionnement relatif entre l'interface (106) de manipulation et la structure (104) porteuse est dans l'une quelconque des positions relatives prédéfinies ;• une deuxième configuration dans laquelle le degré de mobilité de l'interface (106) de manipulation par rapport à la structure (104) porteuse est autorisé.
- Accessoire (100) selon la revendication 11, dans lequel le mécanisme (118) d'indexation comprend un organe (119) de rappel configuré pour faire varier le mécanisme (118) d'indexation automatiquement depuis sa deuxième configuration vers sa première configuration lorsque le positionnement relatif entre l'interface (106) de manipulation et la structure (104) porteuse correspond à l'une quelconque des positions relatives prédéfinies
- Ensemble (300) comprenant un dispositif (200) de vissage et/ou de dévissage pour attache de voie ferrée et un accessoire (100) selon l'une quelconque des revendications 1 à 12, le dispositif (200) de vissage et/ou de dévissage comprenant un organe (201) de préhension et un actionneur (202) de commande pour commander une fonction du dispositif (200) de vissage et/ou de dévissage, dans lequel :• le dispositif (103) de couplage est relié au dispositif (200) de vissage et/ou de dévissage ;• l'ensemble (300) est dans la configuration assemblée dans laquelle le dispositif (200) de vissage et/ou de dévissage et la structure (104) porteuse sont assemblés de manière démontable par le système (105) de couplage qui assure un découplage vibratoire entre la poignée (101) de manipulation et l'organe (201) de préhension.
- Ensemble (300) selon la revendication 13, comprenant un chariot (301), le chariot (301) comprenant un système (302) de roulage pour rouler sur les rails (1001, 1002) de la voie (1000) ferrée à entretenir et un bras articulé au bout duquel est monté l'accessoire (100).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR2306172A FR3149913B1 (fr) | 2023-06-16 | 2023-06-16 | Accessoire pour un dispositif de vissage et/ou de dévissage pour attache de voie ferrée |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4477797A1 true EP4477797A1 (fr) | 2024-12-18 |
Family
ID=87889139
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24181780.8A Pending EP4477797A1 (fr) | 2023-06-16 | 2024-06-12 | Accessoire pour un dispositif de vissage et/ou de dévissage pour attache de voie ferrée |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4477797A1 (fr) |
| FR (1) | FR3149913B1 (fr) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210354274A1 (en) * | 2020-05-13 | 2021-11-18 | Focused Technology Solutions, Inc. | Railway Clip Positioning, Setting, and Insertion System |
-
2023
- 2023-06-16 FR FR2306172A patent/FR3149913B1/fr active Active
-
2024
- 2024-06-12 EP EP24181780.8A patent/EP4477797A1/fr active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210354274A1 (en) * | 2020-05-13 | 2021-11-18 | Focused Technology Solutions, Inc. | Railway Clip Positioning, Setting, and Insertion System |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3149913B1 (fr) | 2025-06-27 |
| FR3149913A1 (fr) | 2024-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2109988C (fr) | Procede et dispositif de freinage notamment pour cycles | |
| CA2647375C (fr) | Roue retractable pour ski de motoneige | |
| FR2815320A3 (fr) | Trottinette a mecanisme amortisseur | |
| EP0002632B1 (fr) | Dispositif de rattrapage d'usure pour frein et frein pourvu de ce dispositif | |
| FR2512512A1 (fr) | Limiteur de couple pour engrenage de reduction a planetaires | |
| EP3006333A1 (fr) | Atterrisseur d'aéronef | |
| EP4477797A1 (fr) | Accessoire pour un dispositif de vissage et/ou de dévissage pour attache de voie ferrée | |
| EP1247710A1 (fr) | Ensemble de pédale de frein pour un véhicule automobile | |
| EP3670964A1 (fr) | Procede de protection contre les chocs pouvant affecter un atterrisseur d'aeronef | |
| FR2744677A1 (fr) | Dispositif de suspension d'un groupe moto-propulseur de vehicule automobile, comportant une biellette anti-couple | |
| FR2774733A1 (fr) | Frein a disque a reaction equilibree | |
| EP3416880B1 (fr) | Kit de suspensions a compression ajustable pour un véhicule | |
| FR3064590A1 (fr) | Vehicule pendulaire a organes de blocage d'inclinaison | |
| FR2703003A1 (fr) | Chariot élévateur à fourches comportant une roue motrice et des roues d'appui latérales. | |
| WO2016034794A1 (fr) | Vehicule avec un element incompressible fixe sur un element compressible en cas de collision | |
| EP3071855A1 (fr) | Frein à tambour fonctionnant en mode simplex et/ou en mode duo servo | |
| FR3129899A1 (fr) | Boitier différentiel intégrant un dispositif de frein de parking et un dispositif de déconnexion de roues d'un véhicule automobile | |
| WO2002008049A1 (fr) | Remorque pour un vehicule deux-roues | |
| WO2021111072A1 (fr) | Engin de loisirs à guidon escamotable | |
| FR3092489A1 (fr) | Dispositif d’assistance électrique | |
| FR2714347A1 (fr) | Dispositif de freinage contrôlé pour engin du type à chenille. | |
| FR3050437B1 (fr) | Dispositif de suspension pour un systeme propulsif d'aeronef | |
| EP1048413B1 (fr) | Clef universelle pour serrer et desserrer des organes d'assemblage polygonaux | |
| FR2923798A1 (fr) | Perfectionnement pour pedalier. | |
| EP0681111A1 (fr) | Dispositif antivibratoire pour câble de commande travaillant en traction |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: COINTOT, MAXIME Inventor name: LY VU, EDOUARD Inventor name: ARAVINDAKSHAN, GERALD Inventor name: TABTE, AHMID |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20250731 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E01B 29/28 20060101AFI20251024BHEP Ipc: E01B 29/29 20060101ALI20251024BHEP |
|
| 17Q | First examination report despatched |
Effective date: 20251127 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: TABTE, AHMID Inventor name: ARAVINDAKSHAN, GERALD Inventor name: LY VU, EDOUARD Inventor name: COINTOT, MAXIME |