EP4484273A1 - Commande d'un système de propulsion de véhicule marin - Google Patents
Commande d'un système de propulsion de véhicule marin Download PDFInfo
- Publication number
- EP4484273A1 EP4484273A1 EP23182754.4A EP23182754A EP4484273A1 EP 4484273 A1 EP4484273 A1 EP 4484273A1 EP 23182754 A EP23182754 A EP 23182754A EP 4484273 A1 EP4484273 A1 EP 4484273A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- values
- request
- propeller
- cyclorotor
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/42—Steering or dynamic anchoring by propulsive elements; Steering or dynamic anchoring by propellers used therefor only; Steering or dynamic anchoring by rudders carrying propellers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H1/00—Propulsive elements directly acting on water
- B63H1/02—Propulsive elements directly acting on water of rotary type
- B63H1/04—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction
- B63H1/06—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction with adjustable vanes or blades
- B63H1/08—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction with adjustable vanes or blades with cyclic adjustment
- B63H1/10—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction with adjustable vanes or blades with cyclic adjustment of Voith Schneider type, i.e. with blades extending axially from a disc-shaped rotary body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H1/00—Propulsive elements directly acting on water
- B63H1/02—Propulsive elements directly acting on water of rotary type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H1/00—Propulsive elements directly acting on water
- B63H1/02—Propulsive elements directly acting on water of rotary type
- B63H1/12—Propulsive elements directly acting on water of rotary type with rotation axis substantially in propulsive direction
- B63H1/14—Propellers
- B63H1/28—Other means for improving propeller efficiency
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H1/00—Propulsive elements directly acting on water
- B63H1/02—Propulsive elements directly acting on water of rotary type
- B63H1/04—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction
- B63H1/06—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction with adjustable vanes or blades
- B63H1/08—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction with adjustable vanes or blades with cyclic adjustment
- B63H1/10—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction with adjustable vanes or blades with cyclic adjustment of Voith Schneider type, i.e. with blades extending axially from a disc-shaped rotary body
- B63H2001/105—Propulsive elements directly acting on water of rotary type with rotation axis substantially at right angles to propulsive direction with adjustable vanes or blades with cyclic adjustment of Voith Schneider type, i.e. with blades extending axially from a disc-shaped rotary body with non-mechanical control of individual blades, e.g. electric or hydraulic control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H5/00—Arrangements on vessels of propulsion elements directly acting on water
- B63H5/02—Arrangements on vessels of propulsion elements directly acting on water of paddle wheels, e.g. of stern wheels
- B63H2005/025—Arrangements on vessels of propulsion elements directly acting on water of paddle wheels, e.g. of stern wheels of Voith Schneider type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
- B63H2021/216—Control means for engine or transmission, specially adapted for use on marine vessels using electric control means
Definitions
- the invention relates to a method of controlling a marine vehicle propulsion system.
- a marine vehicle may move with respect to water around it with thrust from a propulsion system, which includes one or more cyclorotor propellers with blades that extend from the propeller, e.g., perpendicularly or with a tilted angle.
- a propulsion system which includes one or more cyclorotor propellers with blades that extend from the propeller, e.g., perpendicularly or with a tilted angle.
- Such propulsion system would benefit from a controlling system capable of producing a desired force and/or torque requested by a user via simple steering equipment such as a joystick.
- Embodiments and examples of the method described herein may be implemented in any cyclorotor propulsion system with individually controllable blades.
- Figures illustrate various embodiments, they are simplified diagrams that only show some structures and/or functional entities.
- the connections shown in Figures may refer to logical or physical connections. It is apparent to a person skilled in the art that the described apparatus and/or system may also comprise other functions and structures than those described in Figures and text. It should be appreciated that details of some functions, structures, and the signalling used for measurement and/or controlling are irrelevant to the actual invention. Therefore, they need not be discussed in more detail here.
- FIG 1 illustrates an example of a marine vehicle 100 (the marine vehicle is partly shown in Figure 1 ) with a propulsion system 102, which comprises one or more propulsion sub-systems 104, 104'.
- Marine vehicles may include transport vessels and passenger ships, and the term marine vehicle or marine vessel may generally refer to any craft designed for water transportation, for example.
- the transport ships may include cargo vessels and containers, for example.
- the marine vehicles may refer to fishing vessels, service craft like tugboats and supply vessels, and warships.
- the marine vehicles may be used as ferries and submarines. It is apparent to a person skilled in the art that the marine vehicle comprises any number of shown elements, other equipment, other functions, and other structures that are not illustrated. They, as well as the protocols used, are well known by persons skilled in the art and are irrelevant to the actual invention. Therefore, they need not to be discussed in more detail here.
- the propulsion sub-system 104, 104' is a cyclorotor propeller that may be capable of producing both a cycloidal trajectory and a trochoidal trajectory depending on the propeller's advance ratio.
- the advance ratio may be understood as the ratio of freestream fluid speed to the propeller's tip speed.
- Each exemplary propulsion sub-system 104, 104' comprises a propeller wheel 106, 106' and at least two blades 108, 108' that may extend from the wheel 106, 106' perpendicularly with respect to the rotational plane of the wheel 106, 106'.
- the blades 108, 108' are attached with the propeller wheel 106, 106' in a rotatable manner.
- the blades 108, 108' of the propulsion sub-system 104, 104' may be individually controllable in a rotatable manner with respect to the propeller wheel 106, 106' such that a desirable blade position and/or speed can be obtained fully independently for the blades 108, 108'.
- the blades 108, 108' may be jointly controllable and coupled to the propeller wheel 106, 106', e.g., mechanically through suitable joints and/or gears, such that the desirable blade position and/or speed may be obtained for the blades 108, 108'.
- the blades 108, 108' may be coupled to achieve a constant phase difference between the rotation of individual blades.
- a wheel engine system 120 may be common to a plurality of the propulsion sub-systems 104, 104' through a mechanical power transmission.
- each or some of the propulsion sub-systems 104, 104' may have a separate wheel engine system 120.
- Figure 2 illustrates an example where the propulsion system 102 comprises one cyclorotor propeller wheel 106 with individually controllable blades 108. That is, the propulsion system 102 may correspond to one of the propulsion sub-systems 104, 104'. Additionally, the exemplary propulsion system 102 comprises an actuator arrangement 110 and a controller 112. The actuator arrangement 110 is operably coupled to the blades 108 and is configured to rotate the blades.
- the controller 112 may be common to the propulsion sub-systems 104, 104' (see Figure 1 ) or the controller 112 may comprise a plurality of sub-controllers, a sub-controller per propulsion sub-system 104, 104' (such a possibility is illustrated in Figure 2 although the controller 112 in Figure 2 may also exist for the plurality of cyclorotor propellers).
- the controller 112 comprises one or more processors 114 and one or more memories 116 including computer program code.
- the one or more memories 116 and the computer program code cause the controller 112, with the one or more processors 114, to determine values for a set of control parameters.
- the controller 112 then communicates the values for the set of control parameters to the actuator arrangement 110, which sets the at least two blades 108, for example, at blade position and blade speed based on the values of the set of control parameters determined by the controller 112.
- the actuator arrangement 110 may comprise an electric motor arrangement AR per a blade of the at least two blades 108, wherein the electric motor arrangement AR is operably coupled to the respective blade 108.
- the electric motor arrangement AR may be configured to rotate the respective blade 108 around the blade's longitudinal axis as illustrated in the example of Figure 2 .
- the electric motor arrangement AR may comprise a regulator, a gearbox, and an electric motor (blade motor), which turns the blade it is mechanically coupled with according to the values of the control parameters received from the controller 112, for example.
- Functionalities of the propeller wheel 106 and the at least two blades 108 explained with Figure 2 may correspondingly be also applied to the propeller wheel 106' and blades 108' in Figure 1 .
- the controller 112 may also control a drive 118 of the wheel engine system 120.
- the wheel engine system 120 may comprise an engine (motor), which may comprise an electric engine, a combustion engine such as, for example, a diesel engine, petrol engine, or a gas engine, and potentially a mechanical gearbox.
- the configuration of the drive 118 may depend on the type of the engine. If the wheel engine system 120 comprises one or more electric engines (electric motors), the drive 118 may comprise an electric drive configured to control the electric engine(s), for example.
- the controller 112 may send a command to the drive 118 which may then control a rotation speed and/or a direction of rotation of the engine of the wheel engine system 120.
- the wheel engine system 120 can rotate the propeller wheel 106 directly or through the gearbox, for example.
- each of the propulsion sub-systems 104, 104' may have its own wheel engine system 120.
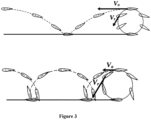
- Figure 3 illustrates examples of trochoidal and epicycloidal trajectories of the cyclorotor propeller.
- the upper illustrated trajectory of the cyclorotor propeller is a trochoidal trajectory.
- the trochoidal trajectory may be used, e.g., during transit movement of the marine vessel.
- the trochoidal trajectory corresponds to advance coefficient (advance ratio, advance parameter) values that are greater than one ( ⁇ , > 1).
- the advance coefficient may be understood as a ratio of a forward speed (vessel advance speed) V a to a rotational tip speed V r .
- the lower illustrated trajectory of the cyclorotor propeller is an epicycloidal trajectory.
- the epicycloidal trajectory may be used, e.g., during bollard pull operation of the marine vessel.
- the epicycloidal trajectory corresponds to advance coefficient values that are smaller than one ( ⁇ , ⁇ 1).
- Figure 4 illustrates an example of the controlling method for a marine vehicle propulsion system comprising a cyclorotor propeller, an actuator arrangement, and a controller.
- a request is received in block 401 by the controller.
- the request comprises at least one force request and/or at least one torque request.
- the at least one force request may comprise, e.g., a thrust request.
- the request may comprise a mode request.
- the mode request may be understood to comprise, e.g., information of a mode of the marine vehicle, such as a transit mode, a bollard pull mode, or a rudder mode.
- the request may be received, for example, from a bridge of the marine vehicle.
- the bridge may comprise steering equipment such as a manual joystick or a rudder by which a user may convoy the request.
- Values for a set of control parameters are determined in block 402 by the controller based on the request.
- the set of control parameters comprises at least one thrust magnitude parameter and at least one thrust direction parameter.
- the at least one thrust magnitude parameter may be, e.g., a rotational speed of the cyclorotor propeller and/or an eccentricity of the cyclorotor propeller.
- the at least one thrust direction parameter may be, e.g., a yaw angle of the cyclorotor propeller and/or an offset angle of an angle of attack of the cyclorotor propeller.
- the values for the control parameters are determined by using an optimization method constrained by the request received and a pre-determined set of constraints for the control parameters using standard algorithms for constrained optimization.
- the optimization method comprises maximizing hydrodynamic efficiency of the cyclorotor propeller.
- the order and coefficients of the efficiency equation may be determined based on an acceptable accuracy during mathematical modelling process using, e.g., computational fluid dynamics (CFD) simulation, lab experiments, and/or sea trial.
- CFD computational fluid dynamics
- the optimization problem formulated above is nonconvex and nonlinear due to the mathematical functions f , g x , and g y used for modelling energy efficiency and thrust.
- Optimization methods that may be employed to solve the optimization problem comprise, e.g., Sequential Quadratic Programming (SQP), interior-point (IP) methods, and Genetic Algorithm.
- the Sequential Quadratic Programming may be understood as an iterative method that solves nonlinear programming problems by iteratively solving a sequence of quadratic subproblems.
- the interior-point methods may be understood to solve optimization problems by finding a solution in an interior of a feasible region.
- the Genetic Algorithm is a population-based stochastic search algorithm inspired by natural selection process. However, the details of the optimization methods are irrelevant to the actual invention and a person skilled in the art is familiar with various optimization methods, per se. Therefore, they need not be discussed in more detail here.
- the pre-determined set of constraints for the control parameters may comprise upper and lower constraints for the control parameters, which may be expressed with equations: ⁇ L ⁇ ⁇ ⁇ ⁇ U , rpm L ⁇ rpm ⁇ rpm U , ⁇ L ⁇ ⁇ ⁇ ⁇ U , where superscripts L and U denote lower and upper constraints, respectively.
- the pre-determined set of constraints may also comprise other constraints for preventing determining unfeasible values for the set of control parameters such as, for example, 1 for eccentricity. If the request comprises the mode request, the pre-determined set of constraints for the control parameters may also depend on the mode request.
- the maximizing the hydrodynamic efficiency of the cyclorotor propeller may comprise determining values for operating condition parameters such as a current vessel velocity.
- the maximizing the hydrodynamic efficiency of the cyclorotor propeller may also comprise obtaining from a pre-determined feasibility solution set feasible thrust values corresponding to the request received and to the operating condition parameters determined.
- the feasible thrust values may comprise a maximum value for the thrust magnitude parameter and/or feasible values for the thrust direction parameter.
- the cyclorotor propeller is controlled in block 403 based on the control parameter values by the actuator arrangement receiving the values for the set of control parameters from the controller.
- the values for the control parameters may be determined and the cyclorotor propeller controlled based on the values, e.g., at least once per a revolution of the cyclorotor propeller.
- the values for the control parameters may be determined and the cyclorotor propeller controlled based on the values when a blade position changes, e.g., a pre-determined amount.
- the pre-determined set of constraints may also comprise constraints or feasible values for other factors, aspects, or features of the cyclorotor propeller such as, e.g., vibration of the cyclorotor propeller, noise produced by the cyclorotor propeller, or cavitation of the cyclorotor propeller.
- Figure 5 illustrates an example of the controlling method, wherein the request comprises at least a thrust magnitude request and a thrust direction request, and the pre-determined feasibility solution set is a first feasibility solution set.
- the thrust vector may be represented via a thrust magnitude Thrust M and a thrust angle Thrust angle , or via a forward component Thrust x and a lateral component Thrust y as explained above.
- Thrust x Thrust M ⁇ cos Thrust angle
- Thrust y Thrust M ⁇ sin Thrust angle
- Thrust M 2 Thrust x 2 + Thrust y 2 , where cos denotes the cosine function and sin denotes the sine function.
- a maximum feasible thrust magnitude corresponding to the values for the operating condition parameters and the thrust direction request is obtained in block 501 from the first feasibility solution set.
- the maximum feasible thrust value may be used as a further constraint in the maximizing the hydrodynamic efficiency of the cyclorotor propeller, expressed for example as an equation: Thrust M ⁇ min Thrust max , Thrust req , where Thrust max denotes the maximum feasible thrust magnitude obtained, and Thrust req denotes the thrust magnitude request.
- a first rotational speed value, a first eccentricity value, and a first yaw angle value are determined in block 502 based on at least the thrust direction request, the thrust magnitude request, the maximum feasible thrust magnitude obtained, and the pre-determined set of constraints, such that the first rotational speed value, the first eccentricity value, and the first yaw angle value maximize the hydrodynamic efficiency of the cyclorotor propeller.
- the first rotational speed value, the first eccentricity value, and the first yaw angle value may be determined, for example, by maximizing the objective function f using standard algorithms for constrained optimization as explained in more detail above.
- the first rotational speed value, the first eccentricity value, and the first yaw angle value are set in block 503 as values for the set of control parameters.
- Figure 6 illustrates an example of determining the first feasibility solution set used in the controlling method illustrated above with Figure 5 .
- a thrust direction range and a plurality of thrust direction values are determined in block 601.
- the thrust direction range may be 0°-360° (0-2 ⁇ rad) or a smaller range.
- the thrust direction values may be, e.g., angle values at equal intervals within the range.
- a maximum feasible thrust magnitude value is determined in block 602, per a thrust direction value of the plurality of thrust direction values determined, based on at least the thrust direction value, the values for the operating condition parameters, and the pre-determined set of constraints.
- the maximum feasible thrust magnitude may be determined, for example, by using standard algorithms for constrained optimization as explained in more detail above.
- the plurality of thrust direction values and the values for the operating condition parameters are stored in block 603 in the first feasibility solution set.
- the maximum feasible thrust magnitude value corresponding to the thrust direction value and the values for the operating condition parameters is also stored in block 603, per a thrust direction value of the plurality of thrust direction values, in the first feasibility solution set.
- Figure 7 illustrates an example of the controlling method, wherein the request comprises at least a sway force request, a surge force request, and a yaw torque request, and the pre-determined feasibility solution set is a second feasibility solution set.
- a set of feasibility constraints corresponding to the current available power and the values for the operating condition parameters is obtained in block 702 from the second feasibility solution set.
- the set of feasibility constraints comprises a maximum feasible sway force, a minimum feasible sway force, a maximum feasible surge force, a minimum feasible surge force, a maximum feasible yaw torque, and a minimum feasible yaw torque.
- a second rotational speed value, a second eccentricity value, and a second yaw angle value are determined in block 703 based on at least the sway force request, the surge force request, the yaw torque request, the set of feasibility constraints obtained, and the pre-determined set of constraints, such that the second rotational speed value, the second eccentricity value, and the second yaw angle value maximize the hydrodynamic efficiency of the cyclorotor propeller.
- the second rotational speed value, the second eccentricity value, and the second yaw angle value may be determined, for example, by maximizing the objective function f using standard algorithms for constrained optimization as explained in more detail above.
- the pre-determined set of constraints may comprise at least an upper constraint and a lower constraint for rotational speed, an upper constraint and a lower constraint for eccentricity, and an upper constraint and a lower constraint for yaw angle.
- the second rotational speed value, the second eccentricity value, and the second yaw angle value are set in block 704 as the values for the set of control parameters.
- Figure 8 illustrates an example of determining the second feasibility solution set used in the controlling method illustrated above with Figure 7 .
- electrical power consumption of the cyclorotor propeller and generated thrust of the cyclorotor are determined in block 801.
- the set of feasibility constraints comprising the maximum feasible sway force, the minimum feasible sway force, the maximum feasible surge force, the minimum feasible surge force, the maximum feasible yaw torque, and the minimum feasible yaw torque is determined in block 802 based on the electrical power consumption of the cyclorotor propeller determined, the generated thrust of the cyclorotor propeller determined, the current available power, the values for the operating condition parameters, and the pre-determined set of constraints.
- the current available power and the values for the operating condition parameters are stored in block 803 in the second feasibility solution set.
- the set of feasibility constraints corresponding to the current available power and the operating condition parameters is also stored in block 803 in the second feasibility solution set.
- the optimization method comprises minimizing a factor of the cyclorotor propeller constrained by the request received and another pre-determined set of constraints for the control parameters.
- the factor of the cyclorotor propeller may be understood as an unwanted factor or aspect such as, e.g., vibration of the cyclorotor propeller, noise produced by the cyclorotor propeller, cavitation of the cyclorotor propeller, or another factor of the cyclorotor propeller of which minimization would be beneficial.
- Maximizing the hydrodynamic efficiency of the cyclorotor propeller may enable calculating optimal values for the control parameters which can be requested by the controller of the marine vehicle with a joystick or by an automatic controller while achieving maximal efficiency regarding to power consumption.
- Minimizing an unwanted factor of the cyclorotor propeller may enable calculating optimal values for the control parameters which can be requested by the controller of the marine vehicle with a joystick or by an automatic controller while, e.g., reducing wearing functioning of the cyclorotor propeller.
- Using the pre-determined feasibility solution set may improve performance of controlling a marine vehicle propulsion system.
- the pre-determined feasibility solution set may prevent oscillations and instability during operation and hence increase lifetime of the propulsion system. Additionally, it may function as an advisory option for a marine vehicle operator to enable the operator to be continuously aware of capability of the propulsion system in current operating conditions.
- Figure 9 is a simplified block diagram illustrating some units for an apparatus (device, equipment) 900 configured to perform at least some functionality described above for controlling the propulsion of a marine vehicle, for example by means of Figures 1 to 8 and any combination thereof.
- the apparatus 900 comprises one or more interface (IF) entities 901, such as one or more user interfaces, and one or more processing entities 902 connected to various interface entities 901 and to one or more memories 903.
- IF interface
- processing entities 902 connected to various interface entities 901 and to one or more memories 903.
- the one or more interface entities 901 are entities for receiving and transmitting information, such as communication interfaces comprising hardware and/or software for realising communication connectivity according to one or more communication protocols, or for realising data storing and fetching, or for providing user interaction via one or more user interfaces as described above in the explanation of the example illustrated by Figures 1 and 2 .
- a processing entity 902 is capable to perform calculations and configured to implement at least part of functionalities/operations described above, for example by means of any of Figures 1 to 8 and any combination thereof, with corresponding algorithms 904 stored in the memory 903.
- the entity 902 may include one or more processors, controllers, control units, micro-controllers, etc. configurable to carry out embodiments/examples/implementations or operations described above, for example by means of any of Figures 1 to 8 and any combination thereof.
- a processor is a central processing unit, but the processor entity 902 may be an additional operation processor or a multicore processor or a microprocessor.
- a memory 903 is usable for storing a computer program code required for one or more functionalities/operations described above, for example by means of any of Figures 1 to 8 and any combination thereof, that is, the algorithms 904 for implementing the functionality/operations described above by means of any of Figures 1 to 8 and any combination thereof.
- the memory 903 may also be usable for storing, at least temporarily, other possible information required for one or more functionalities/operations described above, for example by means of any of Figures 1 to 8 and any combination thereof.
- the memory 903 may comprise a data buffer that may, at least temporarily, store for example measurement data and/or information received as a user input.
- the methods described herein may be configured as a computer or a processor, or a microprocessor, such as a single-chip computer element, or as a chipset, or one or more logic gates including at least a memory for providing storage area used for arithmetic operation and an operation processor for executing the arithmetic operation.
- Each or some or one of the algorithms for functions/operations described above, for example by means of any of Figures 1 to 8 and any combination thereof, may be comprised in one or more computer processors, application-specific integrated circuits (ASIC), digital signal processors (DSP), digital signal processing devices (DSPD), programmable logic devices (PLD), field-programmable gate arrays (FPGA), graphics processing units (GPU) and/or other hardware components that have been programmed and/or will be programmed by downloading computer program code (one or more algorithms) in such a way to carry out one or more functions of one or more embodiments/examples.
- ASIC application-specific integrated circuits
- DSP digital signal processors
- DSPD digital signal processing devices
- PLD programmable logic devices
- FPGA field-programmable gate arrays
- GPU graphics processing units
- An embodiment provides a computer program embodied on any client-readable distribution/data storage medium or memory unit(s) or article(s) of manufacture, comprising program instructions executable by one or more processors/computers, which instructions, when loaded into an apparatus (device, equipment), constitute an entity providing corresponding functionality, or at least part of the corresponding functionality.
- Programs also called program products, including software routines, program snippets constituting "program libraries", applets, and macros, can be stored in any medium, including non-transitory computer readable storage medium, and may be downloaded into an apparatus.
- each or some or one of the algorithms for one or more functions/operations described above may be comprised in an element that comprises one or more arithmetic logic units, a number of special registers and control circuits.
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Feedback Control In General (AREA)
- Operation Control Of Excavators (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23182754.4A EP4484273A1 (fr) | 2023-06-30 | 2023-06-30 | Commande d'un système de propulsion de véhicule marin |
| US18/753,005 US20250002133A1 (en) | 2023-06-30 | 2024-06-25 | Controlling A Marine Vehicle Propulsion System |
| KR1020240083310A KR20250003331A (ko) | 2023-06-30 | 2024-06-26 | 해양 선박 추진 시스템 제어 |
| CN202410849788.7A CN119218398A (zh) | 2023-06-30 | 2024-06-27 | 控制海上交通工具推进系统 |
| JP2024104654A JP2025010023A (ja) | 2023-06-30 | 2024-06-28 | 海上船舶推進システムの制御 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23182754.4A EP4484273A1 (fr) | 2023-06-30 | 2023-06-30 | Commande d'un système de propulsion de véhicule marin |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4484273A1 true EP4484273A1 (fr) | 2025-01-01 |
Family
ID=87060322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23182754.4A Pending EP4484273A1 (fr) | 2023-06-30 | 2023-06-30 | Commande d'un système de propulsion de véhicule marin |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250002133A1 (fr) |
| EP (1) | EP4484273A1 (fr) |
| JP (1) | JP2025010023A (fr) |
| KR (1) | KR20250003331A (fr) |
| CN (1) | CN119218398A (fr) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150321740A1 (en) * | 2014-05-12 | 2015-11-12 | Ge Energy Power Conversion Technology Ltd | Cycloidal marine-propulsion system |
| WO2021249645A1 (fr) * | 2020-06-11 | 2021-12-16 | Abb Oy | Appareil, procédé et programme d'ordinateur permettant de commander la propulsion d'un navire |
| KR20230021141A (ko) * | 2020-06-11 | 2023-02-13 | 에이비비 오와이 | 해양 차량의 추진 시스템 제어 방법 및 추진 시스템 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10926855B2 (en) * | 2018-11-01 | 2021-02-23 | Brunswick Corporation | Methods and systems for controlling low-speed propulsion of a marine vessel |
-
2023
- 2023-06-30 EP EP23182754.4A patent/EP4484273A1/fr active Pending
-
2024
- 2024-06-25 US US18/753,005 patent/US20250002133A1/en active Pending
- 2024-06-26 KR KR1020240083310A patent/KR20250003331A/ko active Pending
- 2024-06-27 CN CN202410849788.7A patent/CN119218398A/zh active Pending
- 2024-06-28 JP JP2024104654A patent/JP2025010023A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150321740A1 (en) * | 2014-05-12 | 2015-11-12 | Ge Energy Power Conversion Technology Ltd | Cycloidal marine-propulsion system |
| WO2021249645A1 (fr) * | 2020-06-11 | 2021-12-16 | Abb Oy | Appareil, procédé et programme d'ordinateur permettant de commander la propulsion d'un navire |
| KR20230021141A (ko) * | 2020-06-11 | 2023-02-13 | 에이비비 오와이 | 해양 차량의 추진 시스템 제어 방법 및 추진 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2025010023A (ja) | 2025-01-20 |
| US20250002133A1 (en) | 2025-01-02 |
| CN119218398A (zh) | 2024-12-31 |
| KR20250003331A (ko) | 2025-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1812287B1 (fr) | Systeme de commande automatique permettant de manoeuvrer des embarcations a moteur, procede associe et embarcation dotee dudit systeme | |
| CN110177741B (zh) | 用于操作包括多个推进单元的船舶的方法 | |
| JP2004042885A (ja) | 推力配分方法及び推力配分装置 | |
| EP3812261B1 (fr) | Procédé et système de commande d'attitude d'un navire | |
| WO2020069750A1 (fr) | Arrimage assisté par propulseur | |
| US11370519B2 (en) | Method and control apparatus for operating a marine vessel | |
| US12139243B2 (en) | Apparatus, method and computer program for controlling propulsion of marine vessel | |
| EP3652066B1 (fr) | Procédé d'étalonnage d'unité de propulsion de navire marin | |
| NO334017B1 (no) | Fremgangsmåte og innretning for å styre et skip | |
| WO2020025745A1 (fr) | Amélioration de l'efficacité de voyage d'un navire | |
| JP2017105403A (ja) | 操船装置 | |
| EP4484273A1 (fr) | Commande d'un système de propulsion de véhicule marin | |
| WO2010008697A2 (fr) | Système et procédé de récupération d’énergie dynamique en propulsion marine | |
| Budashko et al. | Improving the method of linear-quadratic control over a physical model of vessel with azimuthal thrusters | |
| US11347223B1 (en) | Marine propulsion system and method for preventing collision of marine propulsion devices | |
| CN117508534A (zh) | 船舶 | |
| JP2023530263A (ja) | 海上車両の推進システムの制御方法および推進システム | |
| EP2990327B1 (fr) | Système électrique de navire et procédé | |
| JP7785836B2 (ja) | 海上船舶の推進を制御する方法 | |
| CN115705062A (zh) | 航线计算系统、方法和程序、信息处理系统、存储介质 | |
| US20250263162A1 (en) | Stopping function for marine vehicle propulsion system | |
| EP4549310A1 (fr) | Commande du comportement d'une source d'entrée pour navires | |
| EP4688552A1 (fr) | Commande de mouvement de navire basée sur un glissement d'hélice |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20250630 |