EP4491806A1 - Frontlader, arbeitsfahrzeug und arbeitsfahrzeugsystem - Google Patents
Frontlader, arbeitsfahrzeug und arbeitsfahrzeugsystem Download PDFInfo
- Publication number
- EP4491806A1 EP4491806A1 EP23185356.5A EP23185356A EP4491806A1 EP 4491806 A1 EP4491806 A1 EP 4491806A1 EP 23185356 A EP23185356 A EP 23185356A EP 4491806 A1 EP4491806 A1 EP 4491806A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- actuator
- front loader
- work vehicle
- swing arm
- telescopic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/34—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with bucket-arms, i.e. a pair of arms, e.g. manufacturing processes, form, geometry, material of bucket-arms directly pivoted on the frames of tractors or self-propelled machines
- E02F3/3402—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with bucket-arms, i.e. a pair of arms, e.g. manufacturing processes, form, geometry, material of bucket-arms directly pivoted on the frames of tractors or self-propelled machines the arms being telescopic
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/431—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like
- E02F3/432—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like for keeping the bucket in a predetermined position or attitude
- E02F3/433—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like for keeping the bucket in a predetermined position or attitude horizontal, e.g. self-levelling
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/627—Devices to connect beams or arms to tractors or similar self-propelled machines, e.g. drives therefor
Definitions
- a tractor with an attached front loader can fulfil the function of a wheel loader.
- Known front loaders have a swing arm that has a column that can be mounted on an attachment bracket, in particular on an attachment tower, of a work vehicle.
- the front loader In the end area of the swing arm facing away from the column, the front loader has a tool holder via which the front loader can be detachably coupled to a tool, for example a manure fork, a shovel, a pallet fork, a fork with heavy-duty tines, a round bale fork or a beet basket.
- a tool that carries out a working stroke, in particular cutting pliers, a box turning device, a gripping tool (e.g. a film bale gripping tool, a solid manure gripping tool or a log gripping tool) to be attached to the front loader.
- Conventional swing arms consist of a front beam and a rear beam.
- the beams are made of steel tube profiles that are welded together at an angle in their end areas facing each other.
- Hydraulic cylinders the hydraulic supply of which is provided and controlled by the work vehicle, can be used to control the pivoting of the front loader around a pivot bearing that can be formed between the column and the swing arm, and the tool holder relative to the swing arm.
- the hydraulic supply of the hydraulic cylinders can be controlled by the driver by operating levers.
- the disclosure document DE 10 2005 053 041 A1 the applicant discloses general prior art that can be used within the scope of the invention with regard to a front loader with a column, rigidly connected beams and a tool holder as well as two hydraulic cylinders, one for raising and lowering the swing arm and the other for pivoting the tool holder.
- the front loader has a parking support that can be folded out using another hydraulic cylinder.
- the beam can have two beam sections, each designed to receive and rigidly support the load acting on the front loader and which can be moved relative to each other to bring about the different telescopic positions.
- the length of the front loader for example by having the length with the maximum retracted telescopic position and a maximum pivot angle of the longitudinal axes of the two beams be minimal, while the length of the front loader is maximum for the maximum extended telescopic position and the pivot position furthest approximating the extended position of the longitudinal axes of the beams. It is also possible that the same location of the end area of the swing arm, at which the tool holder is pivotably held, can be used for different relative pivot angles of the bars and different telescopic positions (and possibly also for different positions of the hydraulic cylinder for raising and lowering the swing arm), which can be used to expand the movement and control options.
- the first actuator is integrated into the beam.
- the beam In this way, a very compact design of the beam and thus of the front loader can be achieved, whereby a certain degree of protection of the first actuator can also be ensured by the beam.
- telescoping the beam parts is understood to mean both a movement of the beam parts apart to increase the length and an insertion of the beam parts into one another to reduce the length.
- any actuators can be used within the scope of the invention, and actuators of different types can also be used. It is possible, for example, that the actuators are designed as electric linear motors that act directly on the beam parts for telescoping or, similar to a hydraulic cylinder, can be articulated with their two end areas at a distance from the swing arm pivot bearing to the beams to be pivoted. It is also possible that the pivoting of the beams about the swing arm pivot bearing is brought about by an electric rotary drive.
- the first actuator and/or the second actuator are designed as hydraulic actuators, in particular with a hydraulic cylinder. Such hydraulic actuators can be easily integrated into a hydraulic system of a work vehicle and a front loader of a basically known design. On the other hand, it has been shown that actuating the front loader using hydraulic cylinders is robust and, depending on the hydraulic transmission, enables the provision of large forces for lifting, lowering, telescoping and/or pivoting.
- a separate actuation of the first actuator and/or the second actuator is carried out by the user, whereby this can then serve for the simultaneous actuation of the actuators and/or for the actuation of the actuators one after the other or at different times.
- the spar parts can have a straight or curved or angled longitudinal axis and have a constant cross-section or a cross-section that can be changed as desired in the direction of the longitudinal axis, as long as the spar parts are telescopic.
- the spar parts preferably have at least one straight longitudinal section in which the outer cross-section of an inner spar part is guided in a cross-section of the outer spar part.
- the spar parts preferably have non-circular guide cross-sections.
- the non-circular guide cross-sections can then form a positive connection in the circumferential direction around the longitudinal axis, which blocks a relative rotation of the spar parts around the longitudinal axis.
- the non-circular guide cross-sections can then provide the longitudinal degree of freedom for telescoping the spar parts.
- a further solution to the problem underlying the invention is a work vehicle.
- the work vehicle is equipped with an attachment console that allows the work vehicle to be coupled to a front loader, as described above.
- the work vehicle has connecting lines.
- a first connecting line serves to actuate the first actuator in order to telescope the beam into different telescopic positions.
- the work vehicle also has a second connecting line.
- the actuator is actuated by means of the second connecting line in order to to pivot the swing arm pivot bearing into different pivot positions.
- the first and second connecting lines can be designed as electrical lines, via which the control signals for the actuators are transmitted and/or the electrical power supply to the actuators takes place.
- a further solution to the problem underlying the invention is a work vehicle system which has a work vehicle of the type described above and a front loader described above.
- the front loader has a column which is detachably attached to the attachment bracket.
- the work vehicle and the front loader are then connected to one another via the first connecting line and the second connecting line.
- the first actuator and the second actuator are then actuated (in particular electrically, electropneumatically or electrohydraulicly or hydraulically) via the connecting lines.
- the beam 10 has beam parts 20, 21 that are connected to one another via a guide device 22 such that the beam parts 20, 21 have a telescopic degree of freedom 23, by means of which a change in the length of the beam 10 can be brought about.
- the guide device 22 with the telescopic degree of freedom 23 is provided in that one beam part (here the beam part 20 on which the swing arm pivot bearing 12 is formed) is received and guided in the other beam part (here the beam part 21 on which the pivot bearing 6 is formed).
- the outer cross section of the beam part 20 (with a play that enables movement) is designed to correspond to the inner cross section of the beam part 21.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
- Arbeitsfahrzeuge, insbesondere Traktoren, die mit einem Frontlader ausgestattet sind, finden Einsatz in der Landwirtschaft oder im kommunalen Bereich zum Heben, Senken und Transportieren von Lasten. Ein Traktor mit angebautem Frontlader kann die Funktion eines Radladers erfüllen.
- Bekannte Frontlader verfügen über eine Schwinge, die eine Säule aufweist, die an einer Anbaukonsole, insbesondere an einem Anbauturm, eines Arbeitsfahrzeugs montiert werden kann. In dem der Säule abgewandten Endbereich der Schwinge verfügt der Frontlader über eine Werkzeugaufnahme, über die der Frontlader lösbar mit einem Werkzeug, beispielsweise einer Mistgabel, einer Schaufel, einer Palettengabel, einer Gabel mit Schwerlastzinken, einer Rundballengabel oder einem Rübenkorb, koppelbar ist. Möglich ist auch, dass an dem Frontlader ein einen Arbeitshub ausführendes Werkzeug, insbesondere eine Schneidzange, ein Kistendrehgerät, ein Greifwerkzeug (bspw. ein Folienballengreifwerkzeug, ein Festmistgreifwerkzeug oder ein Stammholzgreifwerkzeug), befestigt werden kann.
- Herkömmliche Schwingen bestehen aus einem vorderen Holm und einem hinteren Holm. Die Holme werden von Stahlrohrprofilen gebildet, die unter einem Winkel in ihren einander zugewandten Endbereichen miteinander verschweißt werden. Über Hydraulikzylinder, deren hydraulische Beaufschlagung von dem Arbeitsfahrzeug bereitgestellt und gesteuert wird, kann einerseits ein Verschwenken des Frontladers um ein Schwenklager, welches zwischen der Säule und der Schwinge gebildet werden kann, und andererseits der Werkzeugaufnahme gegenüber der Schwinge gesteuert werden. Eine Steuerung der hydraulischen Beaufschlagung der Hydraulikzylinder kann durch den Fahrer durch eine Betätigung von Hebeln erfolgen. Alternativ kann die hydraulische Beaufschlagung der Hydraulikzylinder über einen Joystick oder einen Kreuzhebel gesteuert werden, wobei eine Bewegung des Joysticks oder Kreuzhebel nach vorne und hinten die Schwinge des Frontladers anheben und absenken kann, während eine Bewegung des Joysticks oder Kreuzhebels nach rechts und links den Schwenkwinkel der Werkzeugaufnahme gegenüber der Schwinge um eine Querachse verändert. Weitere Druck- und/oder Kippschalter können zusätzliche Funktionen, insbesondere eine Betätigung eines einen Arbeitshub ausführenden Werkzeugs, steuern.
- Die hydraulische Beaufschlagung der Hydraulikzylinder erfolgt über Verbindungsleitungen zwischen dem Arbeitsfahrzeug und dem Frontlader, wobei das Hydraulikfluid über eine traktoreigene Hydraulikpumpe bereitgestellt wird. Das Hydrauliksystem kann vom Fahrersitz von dem Fahrer durch Bedienelemente wie Hebel, Schalter oder einen Joystick und mittels an dem Arbeitsfahrzeug vorgesehenen Steuereinrichtungen und/oder auch mittels Steuereinrichtungen, die an dem Frontlader angeordnet sind, gesteuert werden, wobei hierbei auch eine elektromagnetische Steuerung von Steuerventilen Einsatz findet. Die Verbindungsleitungen des Hydrauliksystems zwischen Arbeitsfahrzeug und Frontlader können über Anschlüsse einzeln gekoppelt sein oder es kann eine sogenannte "Multikupplung" Einsatz finden, über welche mehrere oder sämtliche Hydraulikanschlüsse gleichzeitig miteinander gekoppelt werden.
- Die Werkzeugaufnahme kann als sogenannter Euro-Schnellwechselrahmen oder als Werkzeugaufnahme gemäß einer der Normen EN 12525 oder ISO 24410 ausgebildet sein.
- Einsatz finden auch automatische Kopplungseinrichtungen, über welche die Kopplung der Werkzeugaufnahme mit dem Werkzeug und dessen Verriegelung herbeigeführt werden kann, ohne dass der Fahrer die Fahrerkabine verlassen muss.
- Als Parallelführung ausgebildete Koordinierungseinrichtungen können dazu genutzt werden, die hydraulischen Beaufschlagungen des Hydraulikzylinders zum Heben und Senken der Schwinge sowie des Hydraulikzylinders zum Verschwenken der Werkzeugaufnahme gegenüber der Schwinge derart miteinander zu koordinieren, dass sich während des Hebens und Senkens der Schwinge der Winkel zwischen der Werkzeugaufnahme und dem Boden nicht oder nur innerhalb enger Grenzen ändert.
- In diesem technischen Gebiet betrifft die Erfindung einen Frontlader für ein Arbeitsfahrzeug, ein Arbeitsfahrzeug mit einer Anbaukonsole für eine Kopplung des Arbeitsfahrzeugs mit einem Frontlader und ein Arbeitsfahrzeugsystem, welches ein Arbeitsfahrzeug und einen Frontlader aufweist.
- Das Patent
DE 10 2005 048 280 B4 der Anmelderin offenbart allgemeinen, im Rahmen der Erfindung einsetzbaren Stand der Technik bezüglich von dem Fahrer betätigbaren Ventilen des Arbeitsfahrzeugs zur Steuerung der hydraulischen Beaufschlagung der Hydraulikzylinder des Frontladers, zusätzlichen Magnetventilen und hydraulischen Kopplungseinrichtungen für die Kupplung von Verbindungsleitungen zwischen Arbeitsfahrzeug und Frontlader. - Die Offenlegungsschrift
DE 10 2005 053 041 A1 der Anmelderin offenbart allgemeinen, im Rahmen der Erfindung einsetzbaren Stand der Technik hinsichtlich eines Frontladers mit einer Säule, starr miteinander verbundenen Holmen und einer Werkzeugaufnahme sowie zwei Hydraulikzylindern einerseits zum Heben und Senken der Schwinge und andererseits zum Verschwenken der Werkzeugaufnahme. Der Frontlader verfügt über eine über einen weiteren Hydraulikzylinder ausklappbare Abstellstütze. In einem ausgefahrenen Zustand der Abstellstütze kann der Frontlader auf der Werkzeugaufnahme oder einem daran gehaltenen Werkzeug wie einer Schaufeln und der Abstellstütze abgestellt werden, wobei sich der Schwerpunkt des Frontladers mit Werkzeug zwischen den Abstellorten auf dem Boden befindet, aber sich der Frontlader auch über den Zwischenraum zwischen den Abstellorten hinaus erstrecken kann für eine gute Zugänglichkeit der Säule, um das Koppeln der Säule mit der Anbaukonsole des Arbeitsfahrzeugs zu ermöglichen. - Das Patent
DE 10 2009 046 213 B4 der Anmelderin offenbart allgemeinen, im Rahmen der Erfindung einsetzbaren Stand der Technik zur Gestaltung einer Werkzeugaufnahme gemäß ISO 24410 und eines Verriegelungsmechanismus zum Verriegeln des Werkzeugs in der Werkzeugaufnahme. - Das Patent
EP 1 813 730 B1 der Anmelderin offenbart allgemeinen, im Rahmen der Erfindung einsetzbaren Stand der Technik zur Gestaltung eines Hydrauliksystems zum Ansteuern eines Frontladers und zu einer Druckregelung in dem Hydrauliksystem. - Das Patent
EP 1 903 147 B1 der Anmelderin offenbart allgemeinen, im Rahmen der Erfindung einsetzbaren Stand der Technik zur geometrischen Gestaltung der Holme einer Schwinge eines Frontladers und der Integration der Betätigungskinematik des Frontladers mit den Hydraulikzylindern in den Frontlader. - Das Patent
EP 2 840 186 B1 der Anmelderin offenbart allgemeinen, im Rahmen der Erfindung einsetzbaren Stand der Technik zur Gestaltung einer Anbaukonsole, hier in Ausgestaltung mit einem sogenannten Knochen, und für die Gestaltung einer Rast- oder Verriegelungseinrichtung zur Verriegelung der Säule des Frontladers an der Anbaukonsole. - Das Patent
EP 3 158 842 B1 offenbart im Rahmen der Erfindung einsetzbare Gestaltungsmöglichkeiten für eine Anbaukonsole des Arbeitsfahrzeugs, die hier von zwei Anbautürmen auf beiden Seiten des Arbeitsfahrzeugs gebildet ist, welche sich in Längsrichtung erstreckende plattenförmige Rahmenelemente und sich vertikal erstreckende Halterungen mit einem endseitigen Knochen aufweisen. - Das Patent
EP 3 431 668 B1 der Anmelderin offenbart allgemeinen, im Rahmen der Erfindung einsetzbaren Stand der Technik für die Gestaltung einer Teilverkleidung des Frontladers zum Abdecken bewegter Komponenten, insbesondere einer Steuerstange. - Die Patentanmeldung
EP 4 144 925 A1 der Anmelderin offenbart weitere, im Rahmen der Erfindung einsetzbare Möglichkeiten für die Gestaltung einer Anbaukonsole in Form eines Anbauturms, wobei hier der Anbauturm zumindest teilweise mittels Massivumformen hergestellt ist. - Die Webseite https://youtu.be/JchP-UKsL84 (Datum der Einsichtnahme: 12.07.2023) offenbart einen Frontlader, bei dem der hintere, dem Arbeitsfahrzeug zugewandte Holm der Schwinge teleskopierbar ist. Dieser Frontlader ist auch auf der Website www.lfprototipi.com/portfolio-type/caricatore-frontale-telescopico-brevettato dargestellt und (unter Bezugnahme auf eine erfolgte Patentierung) beschrieben.
- Der vorliegenden Erfindung liegt die Aufgabe zugrunde,
- einen Frontlader für ein Arbeitsfahrzeug,
- ein Arbeitsfahrzeug und
- ein Arbeitsfahrzeugsystem
vorzuschlagen, welcher oder welches insbesondere hinsichtlich - der Freiheitsgrade des Frontladers und eines daran gehaltenen Werkzeugs und/oder
- des Arbeitsbereiches des Frontladers und des daran gehaltenen Werkzeugs und/oder
- einer Verbesserung des Sichtfelds des Benutzers in der Kabine des Arbeitsfahrzeugs, insbesondere während der Fahrt
verbessert ist. - Die Aufgabe der Erfindung wird erfindungsgemäß mit den Merkmalen der unabhängigen Patentansprüche gelöst. Weitere bevorzugte erfindungsgemäße Ausgestaltungen sind den abhängigen Patentansprüchen zu entnehmen.
- Die Erfindung schlägt für eine Lösung der der Erfindung zugrunde liegenden Aufgabe einen Frontlader vor, der für ein Arbeitsfahrzeug, insbesondere einen Traktor, bestimmt ist und eine Schwinge aufweist. Die Schwinge verfügt über einen vorderen Holm und einen hinteren Holm. Des Weiteren kann der Frontlader eine an dem vorderen Holm angelenkte Werkzeugaufnahme, die über einen hydraulischen Zylinder verschwenkbar ist, und/oder eine an den hinteren Holm angelenkte Säule, die über einen Hydraulikzylinder verschwenkbar ist, verfügen.
- Erfindungsgemäß wird vorgeschlagen, dass die mit den Holmen gebildete Schwinge nicht starr ist, sondern mindestens einen Freiheitsgrad aufweist:
In dem erfindungsgemäßen Frontlader ist ein Holm mittels eines ersten Aktuators in unterschiedliche Teleskopstellungen teleskopierbar, womit die Länge dieses Holms veränderbar ist. Bei dem teleskopierbaren Holm kann es sich um den vorderen Holm handeln. Vorzugsweise ist aber der hintere Holm teleskopierbar. Die Erfindung umfasst aber auch Ausführungsformen, bei denen beide Holme teleskopierbar sind. - Zur Gewährleistung der Teleskopierbarkeit kann der Holm zwei Holmteile aufweisen, die jeweils für die Aufnahme und steife Abstützung der den Frontlader beaufschlagenden Last ausgelegt sind und relativ zueinander bewegbar sind zur Herbeiführung der unterschiedlichen Teleskopstellungen.
- Die Erfindung schlägt für eine erste Variante vor, dass die Schwinge einen weiteren Freiheitsgrad aufweist:
Für diese Variante sind die beiden Holme um ein Schwingenschwenklager in unterschiedliche (relative) Schwenkstellungen verschwenkbar. Die Verschwenkung der Holme um das Schwingenschwenklager wird dabei mittels eines zweiten Aktuators herbeigeführt. Für diese Variante der Erfindung ist die Länge des Frontladers, die insbesondere den Abstand der einander abgewandten Endbereiche der Holme oder den Abstand der Säule von der Werkzeugaufnahme bezeichnet, sowohl von der Teleskopstellung als auch von Schwenkstellung abhängig. Die beiden Freiheitsgrade ermöglichen veränderte Steuerungsmöglichkeiten für die Bewegung der Werkzeugaufnahme und des daran befestigten Werkzeugs. Möglich ist auch, dass eine Vergrößerung des Änderungsbereichs der Länge des Frontladers herbeigeführt werden kann, indem bspw. die Länge mit der maximal eingefahrenen Teleskopstellung und einem maximalen Schwenkwinkel der Längsachsen der beiden Holme minimal ist, während die Länge des Frontladers für die maximal ausgefahrene Teleskopstellung und der am weitesten der Strecklage der Längsachsen der Holme angenäherten Schwenkstellung maximal ist. Möglich ist auch, dass derselbe Ort des Endbereichs der Schwinge, an dem die Werkzeugaufnahme verschwenkbar gehalten ist, für unterschiedliche relative Schwenkwinkel der Holme und unterschiedliche Teleskopstellungen (und unter Umständen auch für unterschiedliche Stellungen des Hydraulikzylinders zum Heben und Senken der Schwinge) herbeiführbar ist, was zu einer Erweiterung der Bewegungs- und Steuerungsmöglichkeiten genutzt werden kann. - Für eine zweite Variante (die alternativ oder kumulativ zu der ersten Variante Einsatz finden kann) ist der erste Aktuator in den Holm integriert. Auf diese Weise kann eine sehr kompakte Ausgestaltung des Holms und damit des Frontladers herbeigeführt werden, wobei auch ein gewisser Schutz des ersten Aktuators durch den Holm gewährleistet sein kann.
- Um lediglich ein die Erfindung nicht beschränkendes Beispiel zu nennen, können die Holmteile des teleskopierbaren Holms, auf die der erste Aktuator einwirkt, einen einen Innenraum begrenzenden Querschnitt bilden, in dem dann der erste Aktuator angeordnet ist. Hierbei kann der Querschnitt mindestens eines Holmteils randgeschlossen sein, womit der Aktuator (zumindest in einem Längsabschnitt) vollständig im Inneren des mindestens einen Holmteils angeordnet ist. Möglich ist aber auch, dass die Holmteile einen randoffenen Querschnitt (beispielsweise einen geschlitzten Querschnitt oder einen U-förmigen Querschnitt) aufweisen, wobei dann die Randöffnung eines Holmteils durch das andere Holmteil geschlossen sein kann.
- Im Rahmen der Erfindung wird unter einem "Teleskopieren" der Holmteile sowohl eine Bewegung der Holmteile auseinander zur Vergrößerung der Länge als auch ein Einschieben der Holmteile ineinander zu einer Verringerung der Länge verstanden.
- Im Rahmen der Erfindung können beliebige Aktuatoren Einsatz finden, wobei auch Aktuatoren unterschiedlicher Typen eingesetzt sein können. Möglich ist beispielsweise, dass die Aktuatoren als elektrische Linearmotoren ausgebildet sind, die unmittelbar zum Teleskopieren auf die Holmteile einwirken oder ähnlich einem Hydraulikzylinder beabstandet von dem Schwingenschwenklager mit den ihren beiden Endbereichen an den zu verschwenkenden Holmen angelenkt sein können. Ebenfalls möglich ist, dass die Verschwenkung der Holme um das Schwingenschwenklager durch einen elektrischen Drehantrieb herbeigeführt wird. Für einen Vorschlag der Erfindung sind/ist aber der erste Aktuator und/oder der zweite Aktuator als hydraulischer Aktuator, insbesondere mit einem Hydraulikzylinder, ausgebildet. Derartige hydraulische Aktuatoren können einfach in ein Hydrauliksystem eines Arbeitsfahrzeugs und eines Frontladers grundsätzlich bekannter Bauart integriert werden. Andererseits hat sich gezeigt, dass eine Betätigung des Frontladers mittels Hydraulikzylindern robust ist und je nach hydraulischer Übersetzung eine Bereitstellung großer Kräfte zum Heben, Senken, Teleskopieren und/oder Verschwenken ermöglicht.
- Möglich ist, dass im Rahmen der Erfindung eine separate Betätigung des ersten Aktuators und/oder des zweiten Aktuators durch den Benutzer erfolgt, wobei dies dann zur gleichzeitigen Betätigung der Aktuatoren und/oder zur Betätigung der Aktuatoren nacheinander oder zeitlich versetzt dienen kann.
- Für einen besonderen Vorschlag der Erfindung verfügt der Frontlader (oder verfügt das Arbeitsfahrzeug) über eine Koordinierungseinrichtung, welche eine Koordinierung der Beaufschlagung des ersten Aktuators und des zweiten Aktuators vornimmt. Für die von der Koordinierungseinrichtung vorgenommene Koordinierung werden im Folgenden einige Beispiele genannt, die den Rahmen der Erfindung und der möglichen Koordinierungsmaßnahmen nicht einschränken sollen:
- Möglich ist, dass ein an der Werkzeugaufnahme gehaltenes Werkzeug wie eine Schaufel oder eine Ballengabel parallel zum Boden bewegt werden soll, um beispielsweise die geöffnete Schaufel in einen Sandhaufen einzufahren, um die Schaufel mit Sand zu befüllen, oder eine Ballengabel in oder unter einen Ballen zu schieben. Ist der teleskopierbare Holm in diesem Fall nicht horizontal orientiert, führt das Teleskopieren der Holmteile dazu, dass sich die Höhe der Werkzeugaufnahme und des darin gehaltenen Werkzeugs auf unerwünschte Weise ändernd. In diesem Fall kann die Koordinierung den zweiten Aktuator simultan zu der Beaufschlagung des ersten Aktuators derart beaufschlagen, dass diese Beaufschlagung gerade die unerwünschte Veränderung der Höhe der Werkzeugaufnahme und des Werkzeugs ausgleicht.
- Dasselbe kann in umgekehrter Richtung gelten, wenn grundsätzlich die Bewegung der Werkzeugaufnahme oder des Werkzeugs mittels der Beaufschlagung des zweiten Aktuators herbeigeführt wird, während dann eine Ausgleichsbewegung durch den ersten Aktuator mittels der Koordinierungseinrichtung herbeigeführt wird.
- Das Entsprechende kann gelten, wenn eine Werkzeugaufnahme mit daran gehaltenem Werkzeug vertikal bewegt werden soll, beispielsweise um einen Ballen vertikal anzuheben. Ist dann der teleskopierbare Holm nicht vertikal orientiert, führt das Teleskopieren der Holmteile zu einer überlagerten unerwünschten horizontalen Bewegung, die durch die Koordinierungseinrichtung ausgeglichen werden kann durch die simultane Beaufschlagung des zweiten Aktuators. Auch hier gilt das Entsprechende in umgekehrter Richtung.
- Die Holmteile können eine gradlinige oder gekrümmte oder abgewinkelte Längsachse aufweisen und einen konstanten ober beliebig in Richtung der Längsachse veränderlichen Querschnitt aufweisen, solange die Holmteile teleskopierbar sind. Vorzugsweise verfügen die Holmteile zumindest über einen gradlinigen Längsabschnitt, in welchem der Außenquerschnitt eines innenliegenden Holmteils in einem Querschnitt des außenliegenden Holmteils geführt ist. In diesem führenden und teleskopierbaren Längsabschnitt verfügen die Holmteile vorzugsweise über unrunde Führungsquerschnitte. Die unrunden Führungsquerschnitte können dann einen Formschluss in Umfangsrichtung um die Längsachse bilden, der eine relative Verdrehung der Holmteile um Längsachse blockiert. Die unrunden Führungsquerschnitte können dann den Längs-Freiheitsgrad für das Teleskopieren der Holmteile bereitstellen.
- Möglich ist, dass in diesem teleskopierbaren Führungsbereich die Holmteile unmittelbar gleitend aneinander anliegen. Für einen Vorschlag der Erfindung kann die Führung gewährleistet oder verbessert werden und/oder die Reibung zwischen den Holmteilen beim Teleskopieren reduziert werden, indem zwischen den Führungsquerschnitten der Holmteile Gleitlagerelemente angeordnet sind. Über die Gleitlagerelemente sind dann die Holmteile geführt. Die Gleitlagerelemente können entsprechend den beliebigen, aus dem Stand der Technik vorhandenen Gleitlagerelementen ausgebildet sein. Beispielsweise können als Gleitlagerelemente Gleitplatten eingesetzt sein. Hier können bspw. mehrere derartige ebene Gleitplatten über einen unrunden Führungsquerschnitt der Holmteile verteilt angeordnet sein, die dann eine Abstützung der Holmteilen aneinander vertikal zu der Längs- oder Teleskopachse in unterschiedliche Richtung gewährleisten.
- Eine weitere Lösung der der Erfindung zugrunde liegenden Aufgabe stellt ein Arbeitsfahrzeug dar. Das Arbeitsfahrzeug ist mit eine Anbaukonsole ausgestattet, die eine Kopplung des Arbeitsfahrzeug mit einem Frontlader ermöglichen, wie dieser zuvor beschrieben worden ist. Für diese Lösung weist das Arbeitsfahrzeug Verbindungsleitungen auf. Eine erste Verbindungsleitung dient dazu, den ersten Aktuator zu betätigen, um den Holm in unterschiedliche Teleskopstellungen zu teleskopieren. Des Weiteren weist das Arbeitsfahrzeug eine zweite Verbindungsleitung auf. Mittels der zweiten Verbindungsleitung erfolgt die Beaufschlagung des Aktuators, um die Holme um das Schwingenschwenklager in unterschiedliche Schwenkstellungen zu verschwenken. Hierbei können die erste und zweite Verbindungsleitung als elektrische Leitungen ausgebildet sein, über die die Steuersignale für die Aktuatoren übertragen werden und/oder die elektrische Leistungsversorgung der Aktuatoren erfolgt. Vorzugsweise sind die erste und zweite Verbindungsleitung als hydraulische Leitungen ausgebildet, über die die hydraulische Beaufschlagung der dann als Hydraulikzylinder ausgebildeten Aktuatoren erfolgt. Die Verbindungsleitungen verfügen über geeignete Anschlüsse, über die die Kopplung dieser Verbindungsleitungen zwischen Arbeitsfahrzeug und Frontlader möglich ist.
- Eine weitere Lösung der der Erfindung zugrunde liegenden Aufgabe stellt ein Arbeitsfahrzeugsystem dar, welches über ein Arbeitsfahrzeug der zuvor erläuterten Art sowie einen zuvor beschriebenen Frontlader verfügt. Der Frontlader weist in diesem Fall eine Säule auf, die lösbar an der Anbaukonsole befestigt ist. Das Arbeitsfahrzeug und der Frontlader sind dann über die erste Verbindungsleitung und über die zweite Verbindungsleitung miteinander verbunden. Über die Verbindungsleitungen erfolgt dann die (insbesondere elektrische, elektropneumatische oder elektrohydraulische oder hydraulische) Beaufschlagung des ersten Aktuators und des zweiten Aktuators.
- Vorteilhafte Weiterbildungen der Erfindung ergeben sich aus den Patentansprüchen, der Beschreibung und den Zeichnungen.
- Die in der Beschreibung genannten Vorteile von Merkmalen und von Kombinationen mehrerer Merkmale sind lediglich beispielhaft und können alternativ oder kumulativ zur Wirkung kommen, ohne dass die Vorteile zwingend von erfindungsgemäßen Ausführungsformen erzielt werden müssen.
- Hinsichtlich des Offenbarungsgehalts - nicht des Schutzbereichs - der ursprünglichen Anmeldungsunterlagen und des Patents gilt Folgendes: Weitere Merkmale sind den Zeichnungen - insbesondere den dargestellten Geometrien und den relativen Abmessungen mehrerer Bauteile zueinander sowie deren relativer Anordnung und Wirkverbindung - zu entnehmen. Die Kombination von Merkmalen unterschiedlicher Ausführungsformen der Erfindung oder von Merkmalen unterschiedlicher Patentansprüche ist ebenfalls abweichend von den gewählten Rückbeziehungen der Patentansprüche möglich und wird hiermit angeregt. Dies betrifft auch solche Merkmale, die in separaten Zeichnungen dargestellt sind oder bei deren Beschreibung genannt werden.
- Diese Merkmale können auch mit Merkmalen unterschiedlicher Patentansprüche kombiniert werden. Ebenso können in den Patentansprüchen aufgeführte Merkmale für weitere Ausführungsformen der Erfindung entfallen, was aber nicht für die unabhängigen Patentansprüche des erteilten Patents gilt.
- Die in den Patentansprüchen und der Beschreibung genannten Merkmale sind bezüglich ihrer Anzahl so zu verstehen, dass genau diese Anzahl oder eine größere Anzahl als die genannte Anzahl vorhanden ist, ohne dass es einer expliziten Verwendung des Adverbs "mindestens" bedarf. Wenn also beispielsweise von einer Verbindungsleitung oder einem Gleitlagerelement die Rede ist, ist dies so zu verstehen, dass genau eine Verbindungsleitung oder genau ein Gleitlagerelement, zwei Verbindungsleitungen oder Gleitlagerelemente oder mehr Verbindungsleitungen oder Gleitlagerelemente vorhanden sind. Die in den Patentansprüchen angeführten Merkmale können durch weitere Merkmale ergänzt werden oder die einzigen Merkmale sein, die der Gegenstand des jeweiligen Patentanspruchs aufweist.
- Die in den Patentansprüchen enthaltenen Bezugszeichen stellen keine Beschränkung des Umfangs der durch die Patentansprüche geschützten Gegenstände dar. Sie dienen lediglich dem Zweck, die Patentansprüche leichter verständlich zu machen.
- Im Folgenden wird die Erfindung anhand in den Figuren dargestellter bevorzugter Ausführungsbeispiele weiter erläutert und beschrieben.
- Fig. 1
- zeigt einen Frontlader in einem Längsschnitt mit einer abgewinkelten Schwenkstellung der Holme und einem maximal eingefahrenen teleskopierbaren Holm.
- Fig. 2
- zeigt einen Querschnitt II-II des Frontladers gemäß
Fig. 1 . - Fig. 3
- zeigt den Frontlader gemäß
Fig. 1 und2 in einem Längsschnitt mit einer abgewinkelten Schwenkstellung der Holme und mit einem maximal ausgefahrenen teleskopierbaren Holm. - Fig. 4
- zeigt den Frontlader gemäß
Fig. 1 bis 3 in einem Längsschnitt mit einer eine Strecklage bildenden Schwenkstellung der Holme und mit einem maximal eingefahrenen teleskopierbaren Holm. - Fig. 5
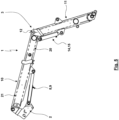
- zeigt den Frontlader gemäß
Fig. 1 bis 4 in einer Seitenansicht. - Fig. 6
- zeigt den Frontlader gemäß
Fig. 1 bis 5 in einer Ansicht von oben. - In den Figuren sind Bauelemente, Komponenten und Merkmale, die sich hinsichtlich ihrer Gestaltung und/oder Funktion entsprechen oder ähneln, teilweise mit denselben Bezugsnummern gekennzeichnet, wobei diese dann durch einen zusätzlichen Buchstaben a, b, ... voneinander unterschieden sein können. In diesem Fall kann auf die Bauelemente, Komponenten oder Merkmale mit oder ohne den ergänzenden Buchstaben Bezug genommen sein, womit dann eine, mehrere oder sämtliche mit diesen Bezugsnummern gekennzeichneten Komponenten, Bauelemente oder Merkmale angesprochen sein können.
-
Fig. 1 zeigt einen Frontlader 1. Der Frontlader verfügt über eine Säule 2, eine Schwinge 3 und eine in den Figuren nicht dargestellte Werkzeugaufnahme. Die Säule 2 verfügt über Befestigungselemente 4, 5, über die die Säule 2 an einer Anbaukonsole eines Arbeitsfahrzeugs lösbar befestigt werden kann. Für das dargestellte Ausführungsbeispiel sind die Befestigungselemente 4, 5 als vertikal zur Zeichenebene orientierte Befestigungsbolzen ausgebildet. - In einem Schwenklager 6 ist die Schwinge 3 verschwenkbar um eine vertikal zur Zeichenebene orientierte Schwenkachse 7 an der Säule 2 angelenkt. Die Verschwenkung der Schwinge 3 um die Schwenkachse 7 relativ zur Säule 2 kann herbeigeführt werden mittels eines Aktuators 8, welcher hier als Hydraulikzylinder 9 ausgebildet ist. Obwohl die Schwinge 3 um die Schwenkachse 7 verschwenkt wird, wird vereinfacht auch die Verschwenkung der Schwinge 3 um die Schwenkachse 7 mittels des Hydraulikzylinders 9 als Heben bzw. Senken des Frontladers 1 bezeichnet.
- Die Schwinge 3 verfügt über Holme 10, 11. Die Holme 10, 11 sind in ihren einander zugewandten Endbereichen über ein Schwingenschwenklager 12 verschwenkbar um eine Schwingenschwenkachse 13 verschwenkbar. Die Verschwenkung um die Schwingenschwenkachse 13 wird mittels eines Aktuators 14 herbeigeführt, der hier teilweise auch als "zweiter Aktuator" bezeichnet ist und als Hydraulikzylinder 15 ausgebildet ist. Der Aktuator 14 ist in den Endbereichen jeweils beabstandet von dem Schwingenschwenklager 12 an den Holmen 10, 11 angelenkt.
- In dem dem Schwingenschwenklager 12 abgewandten Endbereich verfügt der Holm 11 über ein Schwenklager 16, von dem in
Fig. 1 nur ein Lagerauge dargestellt ist. In dem Schwenklager 16 ist an dem Holm 11 die nicht dargestellte Werkzeugaufnahme verschwenkbar angelenkt. Beabstandet von dem Schwenklager 16 ist an der Werkzeugaufnahme auch ein Aktuator 17, der hier ebenfalls als Hydraulikzylinder ausgebildet ist, in einem Schwenklager 19 angelenkt. Der andere Endbereich des Aktuators 17 ist über ein Schwenklager 35 an dem Holm 11 angelenkt. Je nach Stellweg des Aktuators 17 kann eine Verschwenkung der Werkzeugaufnahme und des an der Werkzeugaufnahme gehaltenen Werkzeugs um die von dem Schwenklager 16 vorgegebene Schwenkachse des Holms 11 herbeigeführt werden. - Der Holm 10 weist Holmteile 20, 21 auf, die über eine Führungseinrichtung 22 derart miteinander verbunden sind, dass die Holmteile 20, 21 einen teleskopischen Freiheitsgrad 23 aufweisen, mittels dessen eine Veränderung der Länge des Holms 10 herbeigeführt werden kann. Für das dargestellte Ausführungsbeispiel wird die Führungseinrichtung 22 mit dem teleskopischen Freiheitsgrad 23 dadurch bereitgestellt, dass ein Holmteil (hier das Holmteil 20, an welchem das Schwingenschwenklager 12 ausgebildet ist) in dem anderen Holmteil (hier das Holmteil 21, an welchem das Schwenklager 6 ausgebildet ist) aufgenommen und geführt ist. Zu diesem Zweck ist der Außenquerschnitt des Holmteils 20 (mit einem eine Bewegung ermöglichendem Spiel) korrespondierend zu dem Innenquerschnitt des Holmteils 21 ausgebildet.
-
Fig. 2 zeigt ein Beispiel für die Gestaltung der Querschnitte der Holmteile 20, 21. Hier ist zu erkennen, dass die Holmteile 20, 21 (zumindest im Bereich der Führungseinrichtung 22) korrespondierende hexagonale Querschnitte aufweisen. Die hexagonalen Querschnitte haben zur Folge, dass der Querschnitt zwischen den sechs Ecken sechs ebene Teilflächen aufweist, über welche zwischen den Holmteilen 20, 21 eine gute Abstützung in Richtung der Flächennormalen der Teilflächen gewährleistet werden kann. - Zwischen den Holmteilen 20, 21 sind Gleitlagerelemente 24 angeordnet, die für das dargestellte Ausführungsbeispiel als Gleitlagerplatten 25 ausgebildet sind, die an einer der Teilflächen der hexagonalen Querschnitte angeordnet sind.
- Ein Teleskopieren der Holmteile 20, 21 erfolgt mittels eines Aktuators 26, der hier als Hydraulikzylinder 26 ausgebildet ist und in den Holm 10 sowie die Holmteile 20, 21 integriert ist. Die Holmteile 20, 21 begrenzen einen Innenraum 28, in dem der Hydraulikzylinder 27 angeordnet ist und durch den sich der Hydraulikzylinder 27 erstreckt.
- Mit einem Schwenklager 29 ist der Aktuator 26, hier eine Kolbenstange 30, an dem Holmteil 20 angelenkt, während der andere Endbereich des Aktuators 26, hier das Zylindergehäuse 31, in einem Schwenklager 32 an dem Holmteil 21 angelenkt ist.
- In
Fig. 1 ist die Länge des teleskopierbaren Holms 10 minimal, so dass der Aktuator 26 bzw. Hydraulikzylinder 27 vollständig eingefahren ist. Des Weiteren ist inFig. 1 der Aktuator 14 bzw. Hydraulikzylinder 15 teilweise, weitestgehend oder vollständig eingefahren, so dass sich ein Schwenkwinkel zwischen den Längsachsen der Holme 10, 11 um die Schwenkachse 13 ergibt, der im Bereich zwischen 90° und 180°, hier ungefähr 120° bis 130°, liegt. -
Fig. 3 zeigt eine veränderte Betriebsstellung des Frontladers 1, welche durch Ausfahren des Aktuators 26 bzw. Hydraulikzylinders 27 herbeigeführt ist, womit sich die Länge des Holms 10 vergrößert hat. Dieses teleskopartige Ausfahren des Holms 10 führt infolge der hier horizontalen Ausrichtung des Holms 10 dazu, dass ein an der Werkzeugaufnahme gehaltenes Werkzeug horizontal zum Boden bewegt wird. Die Reichweite des Frontladers 11 wird durch das Teleskopieren des Holms 10 vergrößert. Die Länge der Schwinge 3, die den Abstand der Schwenklager 6, 16 voneinander kennzeichnet, ist durch das Ausfahren des Aktuators 26 bzw. Hydraulikzylinders 27 vergrößert worden, wobei infolge des Winkels der Holme 10, 11 die Vergrößerung der Länge der Schwinge 3 kleiner ist als die Vergrößerung der Länge des Holms 10. -
Fig. 4 zeigt eine weitere Betriebsstellung des Frontladers 1, die aus der Betriebsstellung gemäßFig. 1 herbeigeführt ist durch Ausfahren des Aktuators 14 bzw. Hydraulikzylinders 15 derart, dass die Holme 10, 11 ihre Strecklage einnehmen, in der die Längsachsen der Holme 10, 11 parallel oder fluchtend zueinander angeordnet sind. Dieses Ausfahren des Aktuators 14 führt zu einer Vergrößerung der Länge der Schwinge 3, die hier einerseits mit einem Anheben der Werkzeugaufnahme und des Werkzeugs und andererseits mit einer überlagerten horizontalen Bewegung der Werkzeugaufnahme mit dem Werkzeug einhergeht. - Eine Betriebsstellung mit einer maximalen Länge der Schwinge 3 kann herbeigeführt werden, wenn durch vollständiges Ausfahren des Aktuators 26 bzw. Hydraulikzylinders 27 der Holm 10 auf seine maximale Länge teleskopiert wird (
Fig. 3 ) und durch maximales Ausfahren des Aktuators 14 bzw. Hydraulikzylinders 15 die Holme 10, 11 die Strecklage einnehmen (vgl.Fig. 4 ). -
Fig. 5 zeigt den Frontlader 1 in einer nicht geschnittenen Seitenansicht. Für die inFig. 5 dargestellte Betriebsstellung ist gegenüber den Betriebsstellungen gemäßFig. 1 ,3 und4 der Aktuator 8 bzw. Hydraulikzylinder 9 teilweise eingefahren, was zur Folge hat, dass der Holm 10 nach unten geneigt ist. Der Holm 10 ist der inFig. 5 dargestellten Betriebsstellung ausgefahren. Der Aktuator 14 bzw. der Hydraulikzylinder 15 nimmt eine Betriebsstellung ein, in welcher die Holme 10, 11 abgewinkelt sind. - In
Fig. 6 ist zu erkennen, dass der Frontlader 1 über zwei parallele, entsprechende oder identische Frontladerteile 33a, 33b verfügt, die über Querstreben 34a, 34b miteinander verbunden sind. Die beiden Frontladerteile 33 verfügen jeweils über eine Säule 2a, 2b, über die die Frontladerteile 33a, 33b jeweils mit einer zugeordneten Anbaukonsole des Arbeitsfahrzeugs verbunden werden können. - In den Figuren sind u. U. die Betriebsstellungen der Kolben und Kolbenstangen nicht zutreffend für die beschriebenen Betriebsstellungen des Frontladers dargestellt, wobei der Fachmann die Figuren unter fachkundiger Anpassung der Betriebsstellungen der Kolben und Kolbenstangen interpretieren wird.
-
- 1
- Frontlader
- 2
- Säule
- 3
- Schwinge
- 4
- Befestigungselement
- 5
- Befestigungselement
- 6
- Schwenklager
- 7
- Schwenkachse
- 8
- Aktuator
- 9
- Hydraulikzylinder
- 10
- Holm
- 11
- Holm
- 12
- Schwingenschwenklager
- 13
- Schwingenschwenkachse
- 14
- Aktuator
- 15
- Hydraulikzylinder
- 16
- Schwenklager
- 17
- Aktuator
- 18
- Hydraulikzylinder
- 19
- Schwenklager
- 20
- Holmteil
- 21
- Holmteil
- 22
- Führungseinrichtung
- 23
- teleskopischer Freiheitsgrad
- 24
- Gleitlagerelement
- 25
- Gleitlagerplatte
- 26
- Aktuator
- 27
- Hydraulikzylinder
- 28
- Innenraum
- 29
- Schwenklager
- 30
- Kolbenstange
- 31
- Zylindergehäuse
- 32
- Schwenklager
- 33
- Frontladerteil
- 34
- Querstrebe
- 35
- Schwenklager
Claims (8)
- Frontlader (1) für ein Arbeitsfahrzeug mit einer Holme (10, 11) aufweisenden Schwinge (3), wobei ein Holm (10) mittels eines ersten Aktuators (26) in unterschiedliche Teleskopstellungen telekopierbar ist,
dadurch gekennzeichnet, dassa) die Holme (10, 11) mittels eines zweiten Aktuators (14) um ein Schwingenschwenklager (12) in unterschiedliche Schwenkstellungen verschwenkbar sind und die Länge des Frontladers (1) sowohl von der Teleskopstellung als auch von der Schwenkstellung abhängig ist und/oderb) der erste Aktuator (26) in den Holm (10) integriert ist. - Frontlader (1) nach Anspruch 1, dadurch gekennzeichnet, dass der erste Aktuator (26) und/oder der zweite Aktuator (14) als hydraulischer Aktuator (27; 15) ausgebildet sind/ist.
- Frontlader (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass eine Koordinierungseinrichtung vorhanden ist, welche eine Koordinierung der Beaufschlagung des ersten Aktuators (26) und des zweiten Aktuators (14) vornimmt.
- Frontlader (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der über den ersten Aktuator (26) in unterschiedliche Teleskopstellungen telekopierbare Holm (10) zwei teleskopierbare Holmteile (20, 21) aufweist.
- Frontlader (1) nach Anspruch 4, dadurch gekennzeichnet, dass die Holmteile (20, 21) unrunde Führungsquerschnitte aufweisen.
- Frontlader (1) nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass die Holmteile (20, 21) über zwischen Führungsquerschnitten der Holmteile (20, 21) angeordnete Gleitlagerelemente (24) teleskopierbar geführt sind.
- Arbeitsfahrzeug mit einer Anbaukonsole für eine Kopplung des Arbeitsfahrzeugs mit einem Frontlader (1) nach einem der Ansprüche 1 bis 6, wobei das Arbeitsfahrzeuga) eine erste Verbindungsleitung aufweist, über die mittels des ersten Aktuators (26) der Holm (10) in unterschiedliche Teleskopstellungen telekopierbar ist, undb) eine zweite Verbindungsleitung aufweist, über die mittels des zweiten Aktuators (14) die Holme (10, 11) um das Schwingenschwenklager (12) in unterschiedliche Schwenkstellungen verschwenkbar sind.
- Arbeitsfahrzeugsystem mit einem Arbeitsfahrzeug nach Anspruch 7 und einem Frontlader (1) nach einem der Ansprüche 1 bis 6, wobeia) der Frontlader (1) eine Säule (2) aufweist, die lösbar an der Anbaukonsole befestigt ist, undb) das Arbeitsfahrzeug und der Frontlader (1) über die erste Verbindungsleitung und über die zweite Verbindungsleitung miteinander verbunden sind, über welche eine Beaufschlagung des ersten Aktuators (26) und des zweiten Aktuators (14) erfolgt.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23185356.5A EP4491806B1 (de) | 2023-07-13 | 2023-07-13 | Frontlader, arbeitsfahrzeug und arbeitsfahrzeugsystem |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23185356.5A EP4491806B1 (de) | 2023-07-13 | 2023-07-13 | Frontlader, arbeitsfahrzeug und arbeitsfahrzeugsystem |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP4491806A1 true EP4491806A1 (de) | 2025-01-15 |
| EP4491806C0 EP4491806C0 (de) | 2025-11-19 |
| EP4491806B1 EP4491806B1 (de) | 2025-11-19 |
Family
ID=87280526
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23185356.5A Active EP4491806B1 (de) | 2023-07-13 | 2023-07-13 | Frontlader, arbeitsfahrzeug und arbeitsfahrzeugsystem |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4491806B1 (de) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3907143A (en) * | 1974-02-14 | 1975-09-23 | Silas A Brown | Front end loader for tractors |
| DE102005053041A1 (de) | 2005-11-04 | 2007-05-10 | Wilhelm Stoll Maschinenfabrik Gmbh | Abstellfrontlader zum Ankoppeln eines Arbeitswerkzeugs an eine Arbeitsmaschine |
| EP1903147B1 (de) | 2006-09-21 | 2010-01-13 | Wilhelm Stoll Maschinenfabrik GmbH | Frontlader mit mechanischer Parallelführung |
| EP1813730B1 (de) | 2006-01-25 | 2012-01-11 | Wilhelm Stoll Maschinenfabrik GmbH | Frontlader und Traktorkabine für einen Traktor |
| AT511381A1 (de) * | 2011-05-05 | 2012-11-15 | Andreas Putzgruber | Frontlader |
| DE102005048280B4 (de) | 2004-10-09 | 2013-12-05 | Wilhelm Stoll Maschinenfabrik Gmbh | Traktorwegeventile für Hydrauliksteuerungen mit direkt angeflanschten Kupplungen und/oder Kupplungsvorbauten |
| DE102009046213B4 (de) | 2009-10-30 | 2014-02-13 | Wilhelm Stoll Maschinenfabrik Gmbh | Wechselrahmen für einen Frontlader |
| EP2840186B1 (de) | 2013-07-30 | 2017-05-10 | Wilhelm Stoll Maschinenfabrik GmbH | Befestigungsvorrichtung für eine Befestigung eines Frontladers an einem Arbeitsfahrzeug |
| EP3158842B1 (de) | 2015-09-11 | 2018-08-15 | CLAAS Tractor SAS | Landwirtschaftliches fahrzeug |
| EP3431668B1 (de) | 2017-07-17 | 2019-10-16 | Wilhelm Stoll Maschinenfabrik GmbH | Frontlader und frontlader-teilverkleidung |
| EP4144925A1 (de) | 2021-09-07 | 2023-03-08 | Wilhelm Stoll Maschinenfabrik GmbH | Arbeitsfahrzeug-anbauturm, arbeitsfahrzeug-anbauvorrichtung, set und verfahren |
| PL243090B1 (pl) * | 2019-07-17 | 2023-06-26 | Akademia Gorniczo Hutnicza Im Stanislawa Staszica W Krakowie | Ładowarka czołowa zwłaszcza do niskich, podziemnych wyrobisk górniczych |
-
2023
- 2023-07-13 EP EP23185356.5A patent/EP4491806B1/de active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3907143A (en) * | 1974-02-14 | 1975-09-23 | Silas A Brown | Front end loader for tractors |
| DE102005048280B4 (de) | 2004-10-09 | 2013-12-05 | Wilhelm Stoll Maschinenfabrik Gmbh | Traktorwegeventile für Hydrauliksteuerungen mit direkt angeflanschten Kupplungen und/oder Kupplungsvorbauten |
| DE102005053041A1 (de) | 2005-11-04 | 2007-05-10 | Wilhelm Stoll Maschinenfabrik Gmbh | Abstellfrontlader zum Ankoppeln eines Arbeitswerkzeugs an eine Arbeitsmaschine |
| EP1813730B1 (de) | 2006-01-25 | 2012-01-11 | Wilhelm Stoll Maschinenfabrik GmbH | Frontlader und Traktorkabine für einen Traktor |
| EP1903147B1 (de) | 2006-09-21 | 2010-01-13 | Wilhelm Stoll Maschinenfabrik GmbH | Frontlader mit mechanischer Parallelführung |
| DE102009046213B4 (de) | 2009-10-30 | 2014-02-13 | Wilhelm Stoll Maschinenfabrik Gmbh | Wechselrahmen für einen Frontlader |
| AT511381A1 (de) * | 2011-05-05 | 2012-11-15 | Andreas Putzgruber | Frontlader |
| EP2840186B1 (de) | 2013-07-30 | 2017-05-10 | Wilhelm Stoll Maschinenfabrik GmbH | Befestigungsvorrichtung für eine Befestigung eines Frontladers an einem Arbeitsfahrzeug |
| EP3158842B1 (de) | 2015-09-11 | 2018-08-15 | CLAAS Tractor SAS | Landwirtschaftliches fahrzeug |
| EP3431668B1 (de) | 2017-07-17 | 2019-10-16 | Wilhelm Stoll Maschinenfabrik GmbH | Frontlader und frontlader-teilverkleidung |
| PL243090B1 (pl) * | 2019-07-17 | 2023-06-26 | Akademia Gorniczo Hutnicza Im Stanislawa Staszica W Krakowie | Ładowarka czołowa zwłaszcza do niskich, podziemnych wyrobisk górniczych |
| EP4144925A1 (de) | 2021-09-07 | 2023-03-08 | Wilhelm Stoll Maschinenfabrik GmbH | Arbeitsfahrzeug-anbauturm, arbeitsfahrzeug-anbauvorrichtung, set und verfahren |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4491806C0 (de) | 2025-11-19 |
| EP4491806B1 (de) | 2025-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0182091B1 (de) | Kraftheber für ein Hubgerät | |
| DE19951840A1 (de) | Anbauschnittstelle zur Kopplung von Arbeitsgeräten an ein Arbeitsfahrzeug | |
| DE112008002965T5 (de) | Gelenkverbindungsanordnung zum Verbinden eines Werkzeugs mit dem Rahmen einer Arbeitsmaschine | |
| EP1621682B1 (de) | Umschlaggerät | |
| EP0625614A2 (de) | Mehrzweck-Arbeits-Fahrzeug | |
| EP1008284A2 (de) | Teleskopierbarer Geräteanbau eines Kraftfahrzeugs | |
| EP2042410B1 (de) | Landwirtschaftliches Fahrzeug | |
| DE69122933T2 (de) | Senkrechtausleger für Hublader | |
| EP1163830A1 (de) | Gezogenes landwirtschaftliches Gerät | |
| EP1068780A1 (de) | Verschwenkbarer Geräteanbau eines Kraftfahrzeugs | |
| EP4491806B1 (de) | Frontlader, arbeitsfahrzeug und arbeitsfahrzeugsystem | |
| AT401925B (de) | Ladekran | |
| DE202023002870U1 (de) | Frontlader, Arbeitsfahrzeug und Arbeitsfahrzeugsystem | |
| EP0955230B1 (de) | Arbeitsfahrzeug mit kippbarer Fahrerplattform und Kippvorrichtung | |
| EP0333066B1 (de) | Arbeitsfahrzeug, insbesondere Schaufellader | |
| DE2606019A1 (de) | Rahmen fuer ein raupenfahrzeug | |
| DE102006042498A1 (de) | Fußgänger-Schutz-Vorrichtung an einem Kraftfahrzeug | |
| EP1762132B1 (de) | Mäh- und/oder Schneidgerät | |
| DE1915432C3 (de) | Ladefahrzeug mit an ausziehbaren Schwenkholmen kippbarer Schrappschaufel, insbesondere für die Stallentmistung | |
| DE60111452T2 (de) | Machine mit einem Arbeitsarm | |
| EP4491807A1 (de) | Verfahren zum automatischen koppeln eines frontladers mit einem arbeitsfahrzeug, automatische frontladerkopplungseinrichtung, arbeitsfahrzeug und arbeitsfahrzeugsystem | |
| DE19819270B4 (de) | Seitenstapler | |
| DE3016157C2 (de) | Regalstapler für große Hubhöhen | |
| DE102005018987A1 (de) | Mäh- und/oder Schneidgerät | |
| DE202009003676U1 (de) | Hubwerk für ein Nutzfahrzeug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240409 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E02F 3/34 20060101AFI20250612BHEP Ipc: E02F 3/627 20060101ALN20250612BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20250623 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: F10 Free format text: ST27 STATUS EVENT CODE: U-0-0-F10-F00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251119 Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502023002240 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| U01 | Request for unitary effect filed |
Effective date: 20251217 |
|
| U07 | Unitary effect registered |
Designated state(s): AT BE BG DE DK EE FI FR IT LT LU LV MT NL PT RO SE SI Effective date: 20251223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20251119 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20260219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20251119 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20260219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20260319 |