EP4498178A1 - Système d'actionnement micromécanique à guidage flexible pour l'horlogerie - Google Patents
Système d'actionnement micromécanique à guidage flexible pour l'horlogerie Download PDFInfo
- Publication number
- EP4498178A1 EP4498178A1 EP23187222.7A EP23187222A EP4498178A1 EP 4498178 A1 EP4498178 A1 EP 4498178A1 EP 23187222 A EP23187222 A EP 23187222A EP 4498178 A1 EP4498178 A1 EP 4498178A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- actuation system
- actuator
- translation table
- movable part
- spring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B18/00—Mechanisms for setting frequency
- G04B18/02—Regulator or adjustment devices; Indexing devices, e.g. raquettes
- G04B18/026—Locking the hair spring in the indexing device, e.g. goupille of the raquette
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/06—Oscillators with hairsprings, e.g. balance
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B1/00—Driving mechanisms
- G04B1/10—Driving mechanisms with mainspring
- G04B1/14—Mainsprings; Bridles therefor
- G04B1/145—Composition and manufacture of the springs
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/30—Rotating governors, e.g. centrifugal governors, fan governors
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B1/00—Driving mechanisms
- G04B1/10—Driving mechanisms with mainspring
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B13/00—Gearwork
- G04B13/02—Wheels; Pinions; Spindles; Pivots
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/06—Oscillators with hairsprings, e.g. balance
- G04B17/063—Balance construction
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/32—Component parts or constructional details, e.g. collet, stud, virole or piton
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B18/00—Mechanisms for setting frequency
- G04B18/04—Adjusting the beat of the pendulum, balance, or the like, e.g. putting into beat
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B18/00—Mechanisms for setting frequency
- G04B18/04—Adjusting the beat of the pendulum, balance, or the like, e.g. putting into beat
- G04B18/06—Adjusting the beat of the pendulum, balance, or the like, e.g. putting into beat by setting the collet or the stud of a hairspring
Definitions
- the invention relates to the field of mechanical watchmaking.
- the invention relates more specifically to a micromechanical actuation system with flexible guidance for watchmaking.
- micromechanical actuation systems In the field of micromechanical devices, micromechanical actuation systems are used, which have the function of transmitting a movement between two elements of a micromechanical device.
- Such an actuation system comprises in particular an actuator engaged with the part to be actuated, which may be a gear wheel or an adjustment element.
- Some actuators comprise a fixed part assembled on a support, for example a pivot mounted on the plate, and a part movable relative to the fixed part, for example a rocker pivoting about the pivot.
- a spring exerts a restoring force on the movable part, either to retain it or to push it.
- the spring retains the rocker in a reference position.
- a support piece pushes the rocker from a reference position to an actuation position of the module.
- the rocker returns to its initial position under the effect of the spring.
- the aim of the present invention is to overcome all or part of the drawbacks mentioned above by proposing an actuation system for a highly precise clock movement.
- the invention relates to an actuation system for a watch movement, the actuation system being configured to be able to at least partially move a part according to a plurality of positions, the actuation system comprising a micromechanical actuator intended to be engaged with said part, the micromechanical actuator comprising a part intended to be fixedly mounted, for example relative to a watch movement plate, and a part movable relative to the fixed part, the actuator comprising a spring part connecting the movable part to the fixed part, the spring part carrying the movable part, the actuation system further comprises adjustment means cooperating with the actuator so as to be able to move the movable part of the actuator into a plurality of positions.
- the invention is remarkable in that the spring part comprises a flexible blade guide.
- the invention provides an actuation system with a highly precise actuator, since it can take a large number of very close positions.
- the actuation system avoids play problems thanks to its spring part.
- the flexible blade guide comprises at least two translation tables arranged in series, a first translation table is connected to the fixed part, and a last translation table is connected to the mobile part.
- each translation table comprises a pair of substantially parallel flexible blades and a rigid section on which the pair of flexible blades is mounted.
- two consecutive translation tables are arranged head to tail with respect to each other.
- the rigid sections are extended to be able to associate the following translation table with them.
- At least the spring part is defined substantially in a plane so as to be substantially flat, preferably the movable part also, or even the fixed part.
- At least the second translation table is arranged on a first side of the first translation table, which is opposite the movable part relative to the first translation table.
- At least the last translation table is arranged on a second side of the first translation table, which is towards the movable part.
- the rigid section of the translation table arranged on the first side which is furthest from the first translation table, extends to a translation table arranged on the second side to form a peripheral side of the spring part.
- each rigid section of a translation table extends beyond the pair of flexible blades of said translation table.
- the spring part is arranged under the fixed part.
- the flexible blades of the translation tables of the spring part are substantially parallel in the rest position of the actuator.
- the movable part comprises a hook.
- the actuator is a single-piece, the actuator being for example obtained by a LIGA or DRIE type process.
- the movable part has the shape of an elbow formed of a first segment arranged perpendicular to the rigid section of the last translation table, and a second segment forming a right angle with the first segment.
- the invention also relates to a clockwork movement comprising such an actuation system.
- the invention also relates to a timepiece, for example a watch, comprising such a timepiece movement.
- the subject matter of the invention which is an actuation system, is configured to actuate means for adjusting the rate of a timepiece regulating organ.
- an actuation system may be used for other applications in a timepiece movement, and it is in no way limited to an application in a regulating organ.
- FIGS. 1 to 3 show a schematic representation of an embodiment of a regulating member 1 intended to be arranged in a timepiece movement comprising a plate (not shown in the figures) provided with a housing. Such a movement is for example arranged in a timepiece, such as a watch.
- the regulating organ 1 comprises an inertial mass, here an annular balance 23, a spiral spring 25 as an elastic return element of the inertial mass configured to make it oscillate, a balance shaft 24, and a balance bridge 22.
- the elements are superimposed from bottom to top in the following order: the balance wheel 23, the hairspring 25, and the balance bridge 22.
- the balance shaft 24 passes through the balance center, the hairspring 25, and the balance bridge 22.
- the balance shaft 24 is held by two shock-absorbing bearings 28 arranged at both ends of the balance shaft 24.
- a first bearing is arranged below, and the second bearing 28 is arranged above in the balance bridge 22.
- the balance bridge 22 is provided with a through hole in which the second bearing 28 is held.
- the hairspring 25 preferably extends substantially in one plane.
- the hairspring 25 comprises a flexible ribbon 2 wound on itself in several turns, the ribbon 2 having a predefined stiffness.
- the internal end 9 of the ribbon 2 is made of material or is assembled to a rigid support 3, generally called a collet.
- the rigid support 3 has a substantially triangular shape, and is threaded around the balance shaft 24.
- the spiral spring 25 further comprises means for adjusting its stiffness.
- the adjustment means can be actuated by a user when the regulating member is mounted in the plate of the watch movement.
- the adjustment means comprise a flexible element 5 arranged in series with the strip 2, that is to say following the strip, preferably in its extension, the flexible element 5 connecting an external end 4 of said strip 2 to a rigid support 17.
- the flexible element 5 is integral with the external end 4 of the strip 2.
- the flexible element 5 is an element different from the strip 2.
- the flexible element 5 adds additional stiffness following that of the ribbon 2.
- the flexible element 5 preferably has a stiffness greater than that of the ribbon 2.
- the flexible element 5 is here arranged in the extension of the ribbon 2.
- the adjustment means and the ribbon 2 are in one piece, or even formed from the same material, for example silicon.
- the flexible element 5 of the spiral spring 25 comprises a first flexible blade 19 and a movable semi-rigid part 18, which extends from the external end of the ribbon 2, and is connected to the first flexible blade 19, preferably on the same side of the rigid part 18.
- the first flexible blade 19 is connected on the other hand to the rigid support 17.
- the rigid support 17 has an L shape, a first branch 46 of the L serving as a connection with the first flexible blade 19, the second branch 47 of the L being oriented on the side opposite the first flexible blade 19 so that it can be assembled to the clock movement.
- the spring-balance adjustment means 25 further comprise pre-stressing means 6 for applying a variable force or torque to the flexible element 5.
- pre-stressing means 6 for applying a variable force or torque to the flexible element 5.
- the torque or force is continuously adjustable by the pre-stressing means 6. In other words, the torque or force is not restricted to point values.
- the stiffness of the flexible element 5 can be adjusted with great precision.
- the prestressing means 6 comprise a secondary flexible blade 21, arranged on an opposite side of the rigid part 18 in the extension of the first flexible blade 19.
- the secondary flexible blade 21 is connected by the other end to a curved lever 14 going around the ribbon 2.
- the lever 14 is connected, in addition to the secondary flexible blade 21, to a semi-rigid structure 27 linked to the rigid support 17.
- the semi-rigid structure 27 deforms partly when the lever 14 is actuated by force or torque.
- the force or torque is exerted on the free end 15 of the lever 14.
- the lever 14 of the prestressing means 6 transmits the force or torque couple to the flexible element 5 via the secondary flexible blade 21 and the semi-rigid structure 27, so as to modify the stiffness of the spiral spring 25.
- the regulating member comprises a particular actuation system 20 according to the invention.
- the actuation system 20 is configured to be able to at least partially move a part according to a plurality of positions.
- the part is the lever 14 of the prestressing means 6.
- the regulating member 1 comprises a stud holder 31 provided with a suspended stud 34.
- the stud holder 31 is mechanically connected to the flexible element 5, but it does not block the ribbon 2.
- the stud holder 31 surrounds the second bearing 28.
- the stud holder 31 comprises a central ring 38 arranged around the second bearing 28, and which rests on the balance bridge 22.
- the stud 34 cooperates with the second branch 47 of the rigid support 17.
- the prestressing means 6 and the flexible element 5 are supported by the stud holder 31 from which they are suspended.
- the stud 34 is rigidly connected to the rigid support 17.
- the stud 34 is integral with the rigid support 17.
- the assembly of the stud 34 and the spiral spring 25 is for example carried out by gluing, brazing, welding, by deformation of metallic glass, or by mechanical fixing.
- the stud 34 is movable relative to the balance bridge.
- the stud holder 31 is movable in rotation about the second bearing 28 relative to the balance bridge 22.
- the stud holder 34 can for example be moved over an angular range of 20°, or even 10°.
- the movement of the stud 34 relative to the balance bridge 22 makes it possible to adjust the reference of the regulating organ 1.
- the actuation system 20 further comprises an actuator 30 configured to actuate the lever 14.
- the actuator 30 is mechanically connected to the prestressing means 6, the actuator 30 being configured to perform at least part of a movement, preferably substantially linear, or even rectilinear, to actuate the prestressing means 6.
- At least a portion of the actuator 30 moves substantially along a straight line, unlike, for example, the stud holder 31 which undergoes rotation by turning around an axis.
- at least a portion of the actuator 30 moves closer to or away from the spiral spring 25 in a direction oriented substantially toward the spiral spring.
- the direction of movement of the actuator 30 is substantially radial relative to the balance 23 and the hairspring 25.
- the straight line along which the actuator 30 moves is directed towards the centre of the balance 23 and the hairspring 25. Furthermore, this makes the adjustment of the rate independent of the adjustment of the mark.
- the actuator 30 is eccentric relative to the regulating member, that is to say mounted at a distance from the center of the regulating member 1, and is connected only to the lever 14 of the adjustment means. Thus, the actuator 30 is not mounted directly on the regulating member 1, like a stud holder on a bearing 28 of the regulating member 1 for example.
- the actuator 30 is mounted on the balance bridge 22.
- the actuator 30 is mounted substantially perpendicular to the plane of the balance bridge 22. More precisely, it is assembled on a slice of the balance bridge 22.
- the actuator 30 comprises in particular a part 33 intended to be fixedly mounted, for example relative to a watch movement plate, a movable part 37 relative to the balance bridge 22 and connected to the lever 14, as well as a spring part 35 joining the movable part 37 to the fixed part 33.
- the fixed part 33 is mounted here on the bridge of balance 22, and is therefore fixed relative to the latter.
- the fixed part 33 and the movable part 37 are preferably rigid.
- the fixed part 33, the spring part 35 and the movable part 37 are arranged in the same plane.
- the actuator 30 is generally flat, and extends substantially in one plane.
- the actuator 30 is preferably in one piece, the actuator 30 being for example obtained by a LIGA type lithography process, or a DRIE type deep reactive ion etching process.
- the actuator 30 comprises a hook 39 engaged with the lever 14, the hook 39 being mounted on the movable part 37.
- the hook 39 at least partly surrounds the lever 14, but it can also be closed around the lever 14.
- the stiffness of the flexible element 5 is modified, because the movement of the lever 14 exerts a greater or lesser force or torque on the flexible element 5, so that the stiffness of the flexible element 5 varies, and consequently the stiffness of the spiral spring 25 as a whole.
- the actuation system 20 thus makes it possible to adjust the operation of the regulating member 1.
- the fixed part 33 here has a substantially square shape, and is provided with at least one fixing notch 41, preferably two fixing notches 41, 42, each to receive a stud 43, 44 extending from the balance bridge 22.
- the fixing notches 41, 42 are for example arranged on two diagonally opposite sides of the fixed part 33.
- Each notch 41, 42 is provided with a flexible tab 48, 49 arranged in the notch 41, 42.
- the first notch 41 is open on the side to slide it laterally around the first stud 43.
- the second notch 42 is closed, and can receive the second stud 44 by insertion into the second notch 42.
- the flexible tabs 48, 49 deform when a stud 43, 44 enters the notch 41, 42, and they serve as a support means to retain the stud 43, 44 in the notch 41, 42.
- the flexible tabs 48, 49 make it possible to improve the positioning precision by taking up the positioning clearances of the studs 43, 44 in the notches 41, 42, preferably in the same direction.
- the actuator 30 is mounted on the balance bridge 22, so as to be substantially perpendicular to the plate and to the balance bridge 22. Thus, it is mounted on the edge of the balance bridge 22.
- the spring portion 35 is arranged below the fixed portion 33, so that it extends below the level of the balance bridge 22.
- the spring part 35 comprises a flexible guide.
- the flexible guide here comprises several translation tables 51, 52, 53, 54 with flexible blades arranged in series, one after the other. They are defined as being in series, because the movements of each translation table add up at least in part.
- Each translation table 51, 52, 53, 54 comprises a pair of substantially parallel flexible blades 61, 62, 63, 64 and a rigid section 56, 57, 58, 59 on which the pair of flexible blades 61, 62, 63, 64 is mounted.
- the first translation table 51 is arranged under the fixed part 33 and has a first rigid section 56 extended to associate therewith a second translation table 52 arranged head to tail relative to the first translation table 51.
- the second pair of flexible blades 52 is substantially parallel to the first pair of flexible blades 51.
- the second rigid section 57 is substantially parallel to the first rigid section 56, but is offset by half the length of the first rigid section.
- the second rigid section 57 is also extended to associate a third translation table 53 arranged head to tail with respect to the second translation table 52, and therefore substantially parallel to the first translation table 51.
- the third pair of flexible blades 63 is substantially parallel to the first 61 and the second pair of flexible blades 62.
- the actuator 30 comprises a fourth translation table 54 arranged on the other side of the first translation table 5 relative to the second 52 and the third translation table 53.
- the fourth translation table 54 is arranged head-to-tail relative to the third translation table 53.
- the fourth pair of flexible blades 64 is substantially parallel to the other pairs of flexible blades, and the fourth section 59 is arranged substantially in the same direction as the second section 57.
- the third 53 and the fourth translation table 54 are connected by an arm 55 extending from the third section 58, and passing below the first rigid section 56 of the first translation table 51.
- Such an arrangement of translation tables 51, 52, 53, 54 makes it possible to obtain a movement of the mobile part 37, which is substantially linear, preferably rectilinear, while retaining a compact actuator 30.
- the actuator 30 comprises an even number of translation tables, since two translation tables arranged head to tail make it possible to mutually compensate for the vertical deviation of the hook 39 generated by each.
- the hook 39 remains substantially at the same height when it moves.
- the movable part 37 extends from the fourth section 59.
- the movable part 37 is preferably rigid.
- the movable part 37 here has the shape of an elbow formed by a first segment 66 arranged perpendicular to the fourth section 59 and a second segment 67 forming a right angle with the first segment 66.
- the hook 39 of the actuator 30 is arranged at the end of the second segment 67.
- a bulge 68 serves as a support to be able to move the movable part 37.
- the mobile part 37 comes closer or less to the fixed part 33, thanks to the deformation of the translation tables 51, 52, 53, 54 of the spring part 35.
- the hook 39 pulls more or less strongly on the lever 14 to actuate the means for adjusting the stiffness of the flexible element 5.
- the direction of movement of the movable part 39 of the actuator 30 and of the lever 14 is substantially orthogonal to the direction of the lever 14.
- the lever 14 is preferably movable in the hook 39, so as to be able to slide when the lever 14 performs an angular displacement.
- the lever 14 comprises a free end 15 cooperating with the hook 39.
- the reference mark can be adjusted without having to modify the position of the actuator 30, in particular relative to the plate of the movement.
- the mechanical connection between the actuator 30 and the lever 14 is maintained regardless of the position of the lever 14 relative to the actuator 30.
- this actuation system 20 makes it possible to adjust the rate and the reference independently of each other, while having a constant predetermined position of the actuator in the movement, for example relative to the plate and the balance bridge 22.
- the actuation system 20 further comprises adjustment means cooperating with the actuator 30 so as to be able to move the movable part 37 of the actuator 30 according to a plurality of positions.
- the adjustment means comprise a pivoting control rocker 45 arranged to move the movable part 37 of the actuator 30.
- the control rocker 45 is preferably arranged in a plane substantially perpendicular to the plane of, and is in contact with the bulge 68 of the movable part 37.
- the control rocker 45 comprises a pivot arm 69 and a support arm 71 connected to a hub 72 of the pivoting control rocker 45.
- the support arm 71 cooperates with the movable part 37 of the actuator 30 to move it mechanically by contact.
- the support arm 71 pushes back more or less the bulge 68 of the movable part 37 to move it.
- the hook 39 pulls more or less the lever 14 of the spiral spring 25.
- the control rocker 45 is configured to pivot in a plane substantially perpendicular to the plane of the actuator 30.
- the control lever 45 is configured to be mounted on the movement plate via the hub 72, which can rotate about a screw body 73, the screw 73 being mounted on the plate.
- the adjustment means further comprise a control screw 70 mechanically connected to the pivot arm 69, in order to control the pivoting of the control rocker 45.
- the axis of the control screw 70 is arranged in the plane of the control rocker 45 in the direction of the pivot arm 69.
- control rocker 45 and the actuator 30 are actuated to move the hook 39 and therefore the lever 14 of the prestressing means 6.
- control screw 70, the control rocker 45, the movable part 37 of the actuator 30, and the lever 15 are each in a first position, in which the hook 39 pulls little on the lever 15.
- control rocker 45, the movable part 37 of the actuator 30, and the lever 15 are shown in a second position corresponding to the figure 10 .
- control screw 70, the control rocker 45, the movable part 37 of the actuator 30, and the lever 15 are each in a second position, in which the hook 39 pulls the lever 15 more than on the figure 9 .
- control screw 70 pushes the pivot arm 69 of the control rocker 45, so that the support arm 71 in contact with the bulge 68, in turn pushes the movable part 37 of the actuator 30 towards the fixed part 33 by deformation of the spring part 35.
- the hook 39 pulls on the lever 14, which performs a centrifugal movement.
- the flexible blades of the first translation table 51 and the third translation table 53 deform in the same first direction
- the flexible blades of the second translation table 52 and the fourth translation table 54 deform in the same second direction, the second direction being opposite to the first direction.
- a spring 74 is arranged around the screw body 73 to press the actuator 30 against the balance bridge 22, so that it does not come loose.
- the spring 74 clamps the screw body 73.
- the spring 74 has a U shape surrounding the screw body 73. One branch of the U here extends from the fixed part 33 of the actuator 30 to which it is attached.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Metallurgy (AREA)
- Transmission Devices (AREA)
- Micromachines (AREA)
- Control Of Position Or Direction (AREA)
- Machine Tool Units (AREA)
Abstract
Description
- L'invention a trait au domaine de l'horlogerie mécanique.
- L'invention concerne plus précisément un système d'actionnement micromécanique à guidage flexible pour l'horlogerie.
- Dans le domaine des dispositifs micromécaniques, on a recours à des systèmes d'actionnement micromécanique, qui ont pour fonction de transmettre un mouvement entre deux éléments d'un dispositif micromécanique.
- Par exemple, dans le domaine de l'horlogerie, pour déclencher ou actionner un module d'horlogerie particulier d'un mouvement, on connait par exemple, des poussoirs, des leviers ou des bascules, agencés dans le mouvement mécanique, et qui permettent de transmettre un mouvement ou une force entre deux pièces du mouvement.
- Un tel système d'actionnement comprend notamment un actionneur en prise avec la pièce à actionner, qui peut être une roue d'engrenage ou un élément de réglage.
- Ces actionneurs ont généralement besoin d'être assez précis pour certaines applications, où le déplacement de l'actionneur doit être contrôlable avec une grande finesse.
- De plus, on souhaite éviter d'avoir du jeu entre les parties de l'actionneur afin d'obtenir la précision recherchée, et éviter les phénomènes d'hystérèse. En effet, certains systèmes d'actionnement comportent plusieurs pièces reliées par contact.
- Certains actionneurs comprennent une partie fixe assemblée sur un support, par exemple un pivot monté sur la platine, et une partie mobile par rapport à la partie fixe, par exemple une bascule pivotante autour du pivot. Pour déplacer la partie mobile en évitant les jeux entre les pièces, un ressort exerce une force de rappel sur la partie mobile, soit pour la retenir, soit pour la pousser. Dans la cas d'une bascule, le ressort retient la bascule dans une position de référence.
- Pour déplace la bascule, une pièce d'appui pousse la bascule pour la faire passer d'une position de référence à une position d'actionnement du module. Lorsque le pièce d'appui se retire, la bascule revient dans sa position initiale sous l'effet du ressort.
- Cependant, pour certaines fonctions, ces systèmes d'actionnement ne sont pas assez précis et sensibles, en particulier pour des dispositifs de réglage, qui exigent une pluralité de positions précises de l'actionneur.
- Le but de la présente invention est de pallier tout ou partie les inconvénients cités précédemment en proposant un système d'actionnement pour un mouvement d'horlogerie d'une grande précision.
- A cet effet, l'invention se rapporte à un système d'actionnement pour un mouvement d'horlogerie, le système d'actionnement étant configuré pour pouvoir déplacer au moins en partie une pièce selon une pluralité de positions, le système d'actionnement comprenant un actionneur micromécanique destiné à être en prise avec ladite pièce, l'actionneur micromécanique comprenant une partie destinée à être montée fixe, par exemple par rapport à une platine de mouvement d'horlogerie, et une partie mobile par rapport à la partie fixe, l'actionneur comportant une partie ressort reliant la partie mobile à la partie fixe, la partie ressort portant la partie mobile, système d'actionnement comprend en outre des moyens de réglage coopérant avec l'actionneur de manière à pouvoir déplacer la partie mobile de l'actionneur selon une pluralité de positions.
- L'invention est remarquable en ce que la partie ressort comprend un guidage à lames flexibles.
- Grâce à l'invention, on obtient un système d'actionnement doté d'un actionneur d'une grande précision, car il peut prendre un grand nombre de positions très proches. En outre, le système d'actionnement évite les problèmes de jeu grâce à sa partie ressort.
- Selon une forme de réalisation particulière de l'invention, le guidage à lames flexibles comprend au moins deux tables de translation agencées en série, une première table de translation est reliée à la partie fixe, et une dernière table de translation est reliée à la partie mobile.
- Selon une forme de réalisation particulière de l'invention chaque table de translation comprend une paire de lames flexibles sensiblement parallèles et un tronçon rigide sur lequel la paire de lames flexibles est montée.
- Selon une forme de réalisation particulière de l'invention, deux tables de translation consécutives sont agencées tête-bêche l'une par rapport à l'autre.
- Selon une forme de réalisation particulière de l'invention, comprend un nombre pair de tables de translation.
- Selon une forme de réalisation particulière de l'invention, les tronçons rigides sont rallongés pour pourvoir y associer la table de translation suivante.
- Selon une forme de réalisation particulière de l'invention, au moins la partie ressort est définie sensiblement dans un plan de manière à être sensiblement plate, de préférence la partie mobile également, voire aussi la partie fixe.
- Selon une forme de réalisation particulière de l'invention, au moins la deuxième table de translation est agencée d'un premier côté de la première table de translation, qui est opposé à la partie mobile par rapport à la première table de translation.
- Selon une forme de réalisation particulière de l'invention, au moins la dernière table de translation est agencée d'un deuxième côté de la première table de translation, qui est vers la partie mobile.
- Selon une forme de réalisation particulière de l'invention, le tronçon rigide de la table de translation agencée du premier côté, qui est la plus éloignée de la première table de translation, s'étend jusqu'à une table de translation agencée du deuxième côté pour former un côté périphérique de la partie ressort.
- Selon une forme de réalisation particulière de l'invention, chaque tronçon rigide d'une table de translation, s'étend au-delà de la paire de lames flexibles de ladite table de translation.
- Selon une forme de réalisation particulière de l'invention, la partie ressort est agencée sous la partie fixe.
- Selon une forme de réalisation particulière de l'invention, les lames flexibles des tables de translation de la partie ressort sont sensiblement parallèles en position de repos de l'actionneur.
- Selon une forme de réalisation particulière de l'invention, la partie mobile comprend un crochet.
- Selon une forme de réalisation particulière de l'invention, l'actionneur est monobloc, l'actionneur étant par exemple obtenu par un procédé de type LIGA ou de type DRIE.
- Selon une forme de réalisation particulière de l'invention, la partie mobile a une forme de coude formé d'un premier segment agencé perpendiculairement au tronçon rigide de la dernière table de translation, et un deuxième segment formant un angle droit avec le premier segment.
- L'invention se rapporte également à un mouvement d'horlogerie comprenant un tel système d'actionnement.
- L'invention se rapporte encore à une pièce d'horlogerie, par exemple une montre, comprenant un tel mouvement d'horlogerie.
- Les buts, avantages et caractéristiques de la présente invention apparaîtront à la lecture de la description détaillée de plusieurs formes de réalisation données uniquement à titre d'exemples non limitatifs, en référence aux dessins annexés dans lesquels :
- la
figure 1 représente schématiquement une vue en perspective d'un organe réglant comportant un système d'actionnement selon un mode de réalisation de l'invention, l'organe réglant étant agencé dans un mouvement d'horlogerie, - la
figure 2 représente schématiquement une vue en perspective d'une partie de l'organe réglant de lafigure 1 , sans pont de balancier, - la
figure 3 représente schématiquement une vue de dessus d'une partie de l'organe réglant de lafigure 1 , sans pont de balancier et sans palier, - la
figure 4 représente schématiquement une vue de dessus d'un ressort-spiral de l'organe réglant de lafigure 1 , - la
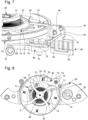
figure 5 représente schématiquement une vue de côté de l'actionneur du système d'actionnement de l'organe réglant de lafigure 1 , - la
figure 6 représente schématiquement une vue de côté de l'actionneur du système d'actionnement de lafigure 5 monté sur le pont de balancier, - la
figure 7 représente schématiquement une vue en perspective agrandie de l'actionneur et de la bascule de déport du système d'actionnement de l'organe réglant, et - la
figure 8 représente schématiquement une vue de dessous de l'organe réglant de lafigure 1 , - la
figure 9 représente schématiquement une vue en perspective agrandie de l'actionneur et de la bascule de déport du système d'actionnement de l'organe réglant dans une première position, et - la
figure 10 représente schématiquement une vue en perspective agrandie de l'actionneur et de la bascule de déport du système d'actionnement de l'organe réglant dans une deuxième position. - Dans la description suivante, l'objet de l'invention, qui est un système d'actionnement, est configuré pour actionner des moyens d'ajustement de la marche d'un organe réglant d'horlogerie. Cependant, un tel système d'actionnement peut être utilisé pour d'autres applications dans un mouvement d'horlogerie, et il n'est nullement limité à une application dans un organe réglant.
- Les
figures 1 à 3 montrent une représentation schématique d'un mode de réalisation d'un organe réglant 1 prévu pour être agencé dans un mouvement d'horlogerie comprenant une platine (non représentée sur les figures) pourvue d'un logement. Un tel mouvement est par exemple agencé dans une pièce d'horlogerie, telle une montre. - L'organe réglant 1 comprend une masse inertielle, ici un balancier 23 annulaire, un ressort-spiral 25 comme élément de rappel élastique de la masse inertielle configuré pour la faire osciller, un arbre de balancier 24, et un pont de balancier 22. Les éléments sont superposés de bas en haut selon l'ordre suivant : le balancier 23, le ressort-spiral 25, et le pont de balancier 22.
- L'arbre de balancier 24 traverse le centre du balancier, le ressort-spiral 25 et le pont de balancier 22. L'arbre de balancier 24 est maintenu par deux paliers antichocs 28 agencés aux deux extrémités de l'arbre de balancier 24. Un premier palier est agencé en dessous, et le second palier 28 est agencé au-dessus dans le pont de balancier 22. Le pont de balancier 22 est doté d'un trou traversant dans lequel le deuxième palier 28 est maintenu.
- Représenté sur les
figures 3 et 4 , le ressort-spiral 25 s'étend de préférence sensiblement dans un plan. Le ressort-spiral 25 comprend un ruban flexible 2 enroulé sur lui-même selon plusieurs spires, le ruban 2 ayant une raideur prédéfinie. L'extrémité interne 9 du ruban 2 vient de matière ou est assemblée à un support rigide 3, généralement dénommée virole. Le support rigide 3 a une forme sensiblement triangulaire, et est enfilé autour de l'arbre du balancier 24. - Le ressort-spiral 25 comporte en outre des moyens d'ajustement de sa raideur. Par exemple, les moyens d'ajustement sont notamment actionnables par un utilisateur lorsque l'organe réglant est monté dans la platine du mouvement d'horlogerie.
- Les moyens d'ajustement comportent un élément flexible 5 agencé en série du ruban 2, c'est-à-dire à la suite du ruban, de préférence dans son prolongement, l'élément flexible 5 reliant une extrémité externe 4 dudit ruban 2 à un support rigide 17. L'élément flexible 5 est solidaire de l'extrémité externe 4 du ruban 2. L'élément flexible 5 est un élément différent du ruban 2.
- L'élément flexible 5 ajoute une raideur supplémentaire à la suite de celle du ruban 2. L'élément flexible 5 a de préférence une raideur supérieure à celle du ruban 2. L'élément flexible 5 est ici agencé dans le prolongement du ruban 2. De préférence, les moyens d'ajustement et le ruban 2 sont monoblocs, voire formés d'une même matière, par exemple en silicium.
- L'élément flexible 5 du ressort-spiral 25 comprend une première lame flexible 19 et une partie semi-rigide 18 mobile, qui s'étend depuis l'extrémité externe du ruban 2, et est reliée à la première lame flexible 19, de préférence sur un même côté de la partie rigide 18. La première lame flexible 19 est reliée d'autre part au support rigide 17.
- Le support rigide 17 a une forme de L, une première branche 46 du L servant de liaison avec la première lame flexible 19, la deuxième branche 47 du L étant orientée du côté opposé à la première lame flexible 19 pour pouvoir être assemblé au mouvement d'horlogerie.
- Les moyens d'ajustement du ressort-spiral 25 comportent en outre des moyens de précontrainte 6 pour appliquer une force ou un couple variable sur l'élément flexible 5. Ainsi, on peut ajuster la raideur du ressort-spiral. Le couple ou la force est ajustable de manière continue par les moyens de précontrainte 6. Autrement dit, le couple ou la force n'est pas restreinte à des valeurs ponctuelles. Ainsi, on peut ajuster la raideur de l'élément flexible 5 avec une grande précision.
- Les moyens de précontrainte 6 comportent une lame flexible secondaire 21, agencée sur un côté opposé de la partie rigide 18 dans le prolongement de la première lame flexible 19.
- La lame flexible secondaire 21 est reliée par l'autre extrémité à un levier 14 courbe contournant le ruban 2. Le levier 14 est relié, en plus de la lame flexible secondaire 21, à une structure semi-rigide 27 liée au support rigide 17. La structure semi -rigide 27 se déforme en partie lorsque le levier 14 est actionné par la force ou le couple.
- La force ou le couple est exercé sur l'extrémité libre 15 du levier 14. Ainsi, le levier 14 des moyens de précontrainte 6 transmet la force ou le couple à l'élément flexible 5 par l'intermédiaire de la lame flexible secondaire 21 et de la structure semi-rigide 27, de manière à modifier la raideur du ressort-spiral 25.
- Pour pouvoir appliquer la force ou le couple variable sur le ressort-spiral 25, l'organe réglant comprend un système d'actionnement 20 particulier selon l'invention.
- Le système d'actionnement 20 est configuré pour pouvoir déplacer au moins en partie une pièce selon une pluralité de positions. Dans ce mode de réalisation, la pièce est le levier 14 des moyens de précontrainte 6.
- Dans le mode de réalisation des
figures 1 à 3 , l'organe réglant 1 comprend un porte-piton 31 muni d'un piton 34 suspendu. Le porte piton 31 est lié mécaniquement à l'élément flexible 5, mais il ne bloque pas le ruban 2. Le porte piton 31 entoure le deuxième palier 28. Pour cela, le porte piton 31 comprend un anneau central 38 agencé autour du deuxième palier 28, et qui repose sur le pont de balancier 22. - Le piton 34 coopère avec la deuxième branche 47 du support rigide 17. Ainsi, les moyens de précontrainte 6 et l'élément flexible 5 sont supportés par le porte-piton 31 auquel ils sont suspendus.
- En outre, le piton 34 est rigidement lié au support rigide 17. Autrement dit, le piton 34 est solidaire du support rigide 17. L'assemblage du piton 34 et du ressort spiral 25 est par exemple opéré par collage, brasage, soudage, par déformation de verre métallique, ou par une fixation mécanique.
- Le piton 34 est mobile par rapport au pont de balancier. A cette fin, le porte-piton 31 est mobile en rotation autour du deuxième palier 28 par rapport pont de balancier 22. Le porte-piton 34 peut par exemple être déplacé sur une plage angulaire de 20°, voire de 10°.
- Le déplacement du piton 34 par rapport au pont de balancier 22 permet de régler le repère de l'organe réglant 1.
- Le système d'actionnement 20 comprend en outre un actionneur 30 configuré pour actionner le levier 14. L'actionneur 30 est relié mécaniquement aux moyens de précontrainte 6, l'actionneur 30 étant configuré pour effectuer au moins en partie un déplacement, de préférence sensiblement linéaire, voire rectiligne, pour actionner les moyens de précontrainte 6.
- Autrement dit, au moins une partie de l'actionneur 30 se déplace sensiblement selon une droite, contrairement par exemple au porte-piton 31 qui subit une rotation en tournant autour d'un axe. Ainsi, au moins une partie de l'actionneur 30 se rapproche ou s'éloigne du ressort spiral 25 selon une direction orientée sensiblement vers le ressort-spiral.
- De préférence, la direction de déplacement de l'actionneur 30 est sensiblement radial par rapport au balancier 23 et au ressort-spiral 25. Ainsi, la droite selon laquelle l'actionneur 30 se déplace est dirigée vers le centre du balancier 23 et du ressort-spiral 25. De plus, cela rend le réglage de la marche indépendant du réglage du repère.
- L'actionneur 30 est excentré par rapport à l'organe réglant, c'est-à-dire monté à distance du centre de l'organe réglant 1, et n'est relié qu'au levier 14 des moyens d'ajustement. Ainsi, l'actionneur 30 n'est pas monté directement sur l'organe réglant 1, comme un porte piton sur un palier 28 de l'organe réglant 1 par exemple.
- Dans ce mode de réalisation, l'actionneur 30 est monté sur le pont de balancier 22. De préférence, l'actionneur 30 est monté sensiblement perpendiculaire au plan du pont de balancier 22. Plus précisément, il est assemblé sur une tranche du pont de balancier 22.
- Sur les
figures 5 et 6 , l'actionneur 30 comprend notamment une partie 33 destinée à être montée fixe, par exemple par rapport à une platine de mouvement d'horlogerie, une partie mobile 37 par rapport au pont de balancier 22 et reliée au levier 14, ainsi qu'une partie ressort 35 joignant la partie mobile 37 à la partie fixe 33. La partie fixe 33 est montée ici sur le pont de balancier 22, et est donc fixe par rapport à celui-ci. La partie fixe 33 et la partie mobile 37 sont de préférence rigides. La partie fixe 33, la partie ressort 35 et la partie mobile 37 sont agencées dans un même plan. Ainsi, l'actionneur 30 est généralement plat, et s'étend sensiblement dans un plan. L'actionneur 30 est de préférence monobloc, l'actionneur 30 étant par exemple obtenu par un procédé de lithographie de type LIGA, ou un procédé de gravure ionique réactive profonde de type DRIE. - Pour actionner le levier 14, l'actionneur 30 comprend un crochet 39 en prise avec le levier 14, le crochet 39 étant monté sur la partie mobile 37. Le crochet 39 entoure au moins en partie le levier 14, mais il peut aussi être fermé autour du levier 14.
- Un déplacement radial de la partie mobile 37 de l'actionneur 30 tire ou pousse le levier 14 radialement par rapport au ressort-spiral 25. Ainsi, on modifie la raideur de l'élément flexible 5, car le déplacement du levier 14 exerce une force ou un couple plus ou moins important sur l'élément flexible 5, de sorte que la raideur de l'élément flexible 5 varie, et par conséquent la raideur du ressort-spiral 25 dans son ensemble. Le système d'actionnement 20 permet ainsi de régler la marche de l'organe réglant 1.
- La partie fixe 33 a ici une forme sensiblement carrée, et est muni d'au moins une encoche de fixation 41, de préférence deux encoches 41, 42 de fixation, pour recevoir chacune un plot 43, 44 s'étendant depuis le pont de balancier 22. Les encoches 41, 42 de fixation sont par exemple agencées sur deux côtés diagonalement opposés de la partie fixe 33.
- Chaque encoche 41, 42 est munie d'une languette flexible 48, 49 disposée dans l'encoche 41, 42. La première encoche 41 est ouverte sur le côté pour la faire glisser latéralement autour du premier plot 43. La deuxième encoche 42 est fermée, et peut recevoir le second plot 44 par insertion dans la deuxième encoche 42. Les languettes flexibles 48, 49 se déforment lorsqu'un plot 43, 44 entre dans l'encoche 41, 42, et elles servent de moyen d'appui pour retenir le plot 43, 44 dans l'encoche 41, 42. En outre, les languettes flexibles 48, 49 permettent d'améliorer la précision du positionnement en rattrapant les jeux de positionnement des plots 43, 44 dans les encoches 41, 42, de préférence dans le même sens.
- Comme le montrent les figures, l'actionneur 30 est monté sur le pont de balancier 22, de manière à être sensiblement perpendiculaire à la platine et au pont de balancier 22. Ainsi, il est monté sur la tranche du pont de balancier 22.
- La partie ressort 35 est disposée sous la partie fixe 33, de sorte qu'elle s'étend sous le niveau du pont de balancier 22.
- Selon l'invention, la partie ressort 35 comprend un guidage flexible. Le guidage flexible comporte ici plusieurs tables de translation 51, 52, 53, 54 à lames flexibles agencées en série, l'une à la suite de l'autre. On définit qu'elles sont en série, car les déplacements de chaque table de translation s'additionnent au moins en partie.
- Chaque table de translation 51, 52, 53, 54 comprend une paire de lames flexibles 61, 62, 63, 64 sensiblement parallèles et un tronçon rigide 56, 57, 58, 59 sur lequel la paire de lames flexibles 61, 62, 63, 64 est montée.
- La première table de translation 51 est agencée sous la partie fixe 33 et a un premier tronçon rigide 56 rallongé pour y associer une deuxième table de translation 52 agencée tête-bêche par rapport à la première table de translation 51. Ainsi, la deuxième paire de lames flexibles 52 est sensiblement parallèle à la première paire de lames flexibles 51. Le deuxième tronçon rigide 57 est sensiblement parallèle au premier tronçon rigide 56, mais est décalé d'une demi-longueur du premier tronçon rigide.
- Le deuxième tronçon rigide 57 est également rallongé pour associer une troisième table de translation 53 agencée tête-bêche par rapport à la deuxième table de translation 52, et donc sensiblement parallèle à la première table de translation 51. La troisième paire de lames flexible 63 est sensiblement parallèle à la première 61 et à la deuxième paire de lames flexibles 62.
- L'actionneur 30 comprend une quatrième table de translation 54 agencée de l'autre côté de la première table de translation 5 par rapport à la deuxième 52 et à la troisième table de translation 53. La quatrième table de translation 54 est agencée tête-bêche par rapport à la troisième table de translation 53.
- Ainsi, la quatrième paire de lames flexibles 64 est sensiblement parallèle aux autres paires de lames flexibles, et le quatrième tronçon 59 est agencé sensiblement selon la même direction que le deuxième tronçon 57.
- La troisième 53 et la quatrième table de translation 54 sont reliées par un bras 55 s'étendant depuis le troisième tronçon 58, et passant en-dessous du premier tronçon rigide 56 de la première table de translation 51.
- Un tel agencement de tables de translation 51, 52, 53, 54 permet d'obtenir un déplacement de la partie mobile 37, qui est sensiblement linéaire, de préférence rectiligne, tour en conservant un actionneur 30 compact.
- De préférence, l'actionneur 30 comprend un nombre pair de tables de translation, car deux tables de translation agencées tête-bêche permettent de compenser mutuellement la déviation verticale du crochet 39 engendrée par chacune. Ainsi, le crochet 39 reste sensiblement à la même hauteur, lorsqu'il se déplace.
- La partie mobile 37 s'étend depuis le quatrième tronçon 59. La partie mobile 37 est de préférence rigide. La partie mobile 37 a ici une forme de coude formé d'un premier segment 66 agencé perpendiculairement au quatrième tronçon 59 et un deuxième segment 67 formant un angle droit avec le premier segment 66.
- Le crochet 39 de l'actionneur 30 est disposé à l'extrémité du deuxième segment 67. A l'extrémité libre du premier segment 66, un renflement 68 sert d'appui pour pouvoir déplacer la partie mobile 37.
- En appuyant plus ou moins fort sur le renflement 68, la partie mobile 37 se rapproche plus ou moins de la partie fixe 33, grâce à la déformation des tables de translation 51, 52, 53, 54 de la partie ressort 35.
- Ainsi, le crochet 39 tire plus ou moins fort sur le levier 14 pour actionner les moyens d'ajustement de la raideur de l'élément flexible 5.
- La direction de déplacement de la partie mobile 39 de l'actionneur 30 et du levier 14 est sensiblement orthogonale à la direction du levier 14.
- En outre, le levier 14 est de préférence mobile dans le crochet 39, de manière à pouvoir coulisser lorsque le levier 14 effectue un déplacement angulaire. À cette fin, le levier 14 comprend une extrémité libre 15 coopérant avec le crochet 39.
- Par exemple, pour pouvoir régler le repère de l'organe réglant 1, il est nécessaire de pouvoir faire tourner le porte-piton 31. Par conséquent, le ressort-spiral 25 tourne avec le porte-piton 31, et l'extrémité libre15 du levier 14 coulisse dans le crochet 39.
- Grâce à un tel système d'actionnement 20, on peut régler le repère sans avoir à modifier la position de l'actionneur 30, en particulier par rapport à la platine du mouvement. La liaison mécanique entre l'actionneur 30 et le levier 14 est conservée quelle que soit la position du levier 14 par rapport à l'actionneur 30.
- Ainsi, ce système d'actionnement 20 permet de régler la marche et le repère indépendamment l'un de l'autre, tout en ayant une position prédéterminée constante de l'actionneur dans le mouvement, par exemple par rapport à la platine et au pont de balancier 22.
- Le système d'actionnement 20 comprend en outre des moyens de réglage coopérant avec l'actionneur 30 de manière à pouvoir déplacer la partie mobile 37 de l'actionneur 30 selon une pluralité de positions.
- Tel que représentés sur le
figures 7 à 10 , les moyens de réglage comprennent une bascule de commande 45 pivotante agencée pour déplacer la partie mobile 37 de l'actionneur 30. La bascule de commande 45 est de préférence disposée dans un plan sensiblement perpendiculaire au plan de, et est en contact avec le renflement 68 de la partie mobile 37. - La bascule de commande 45 comporte un bras de pivotement 69 et un bras d'appui 71 reliés à un moyeu 72 de la bascule de commande pivotante 45.
- Le bras d'appui 71 coopère avec la partie mobile 37 de l'actionneur 30 pour le déplacer mécaniquement par contact. Le bras d'appui 71 repousse plus ou moins le renflement 68 de la partie mobile 37 pour la déplacer. Ainsi, le crochet 39 tire plus ou moins le levier 14 du ressort-spiral 25. La bascule de commande 45 est configurée pour pivoter dans un plan sensiblement perpendiculaire au plan de l'actionneur 30.
- La bascule de commande 45 est configurée pour être montée sur la platine du mouvement par l'intermédiaire du moyeu 72, qui peut tourner autour d'un corps de vis 73, la vis 73 étant montée sur la platine.
- Ainsi, par la rotation de la bascule de commande 45 autour du corps de vis 73, la partie mobile 37 se rapproche ou s'éloigne de la partie fixe 33 par la déformation plus ou moins prononcée de la partie ressort 35 de l'actionneur 30 afin de modifier la position du levier 14.
- Les moyens de réglage comportent encore une vis de commande 70 reliée mécaniquement au bras de pivotement 69, afin de commander le pivotement de la bascule de commande 45. L'axe de la vis de commande 70 est disposée dans la plan de la bascule de commande 45 en direction du bras de pivotement 69.
- Ainsi, en vissant ou en dévissant la vis de commande 70, on actionne la bascule de commande 45 et l'actionneur 30 pour déplacer le crochet 39 et donc le levier 14 des moyens de précontrainte 6.
- La force de rappel de la partie ressort 35 de l'actionneur 30 repousse la bascule de commande 45 contre la vis de commande 70. Ainsi, le bras de pivotement 69 de la bascule de commande 45 est maintenu contre la vis de commande 70.
- Sur la
figure 9 , la vis de commande 70, la bascule de commande 45, la partie mobile 37 de l'actionneur 30, et le levier 15 sont chacun dans une première position, dans laquelle le crochet 39 tire peu sur le levier 15. En pointillés, la bascule de commande 45, la partie mobile 37 de l'actionneur 30, et le levier 15 sont représentés dans une seconde position correspondant à lafigure 10 . - A la
figure 10 , la vis de commande 70, la bascule de commande 45, la partie mobile 37 de l'actionneur 30, et le levier 15 sont chacun dans une seconde position, dans laquelle le crochet 39 tire davantage le levier 15 que sur lafigure 9 . - Dans la deuxième position la vis de commande 70 pousse le bras de pivotement 69 de la bascule de commande 45, de sorte que le bras d'appui 71 en contact avec le renflement 68, pousse à son tour la partie mobile 37 de l'actionneur 30 vers la partie fixe 33 par déformation de la partie ressort 35. Ainsi, le crochet 39 tire sur le levier 14, qui effectue un déplacement centrifuge.
- En configuration déformée de la partie ressort 35, les lames flexibles de la première table de translation 51 et de la troisième table de translation 53 se déforment dans un même premier sens, tandis que les lames flexibles de la deuxième table de translation 52 et de la quatrième table de translation 54 se déforment dans un même deuxième sens, le deuxième sens étant opposé au premier sens.
- Un ressort 74 est agencé autour du corps de vis 73 pour plaquer l'actionneur 30 contre le pont de balancier 22, afin qu'il ne se décroche pas.
- Le ressort 74 serre le corps de vis 73. Le ressort 74 a une forme en U entourant le corps de vis 73. Une branche du U s'étend ici depuis la partie fixe 33 de l'actionneur 30 auquel il est rattaché.
- Naturellement, l'invention n'est pas limitée aux modes de réalisation d'organes réglant décrits en référence aux figures, et des variantes pourraient être envisagées sans sortir du cadre de l'invention.
Claims (17)
- Système d'actionnement pour un mouvement d'horlogerie, le système d'actionnement (20) étant configuré pour pouvoir déplacer au moins en partie une pièce selon une pluralité de positions, le système d'actionnement (20) comprenant un actionneur (30) micromécanique destiné à être en prise avec ladite pièce, l'actionneur (30) micromécanique comprenant une partie (33) destinée à être montée fixe, par exemple par rapport à une platine de mouvement d'horlogerie, et une partie mobile (37) par rapport à la partie fixe (33), l'actionneur (30) comportant une partie ressort (35) reliant la partie mobile (37) à la partie fixe (33), la partie ressort (35) portant la partie mobile (37), le système d'actionnement comprend en outre des moyens de réglage coopérant avec l'actionneur (30) de manière à pouvoir déplacer la partie mobile (37) de l'actionneur (30) selon une pluralité de positions, caractérisé en ce que la partie ressort (35) comprend un guidage à lames flexibles.
- Système d'actionnement selon la revendication 1, caractérisé en ce que le guidage à lames flexibles comprend au moins deux tables de translation (51, 52, 53, 54) agencées en série, une première table de translation (51) est reliée à la partie fixe (33), et une dernière table de translation (54) est reliée à la partie mobile (37).
- Système d'actionnement selon la revendication 2, caractérisé en ce que chaque table de translation (51, 52, 53, 54) comprend une paire de lames flexibles (61, 62, 63, 64) sensiblement parallèles et un tronçon rigide (56, 57, 58, 59) sur lequel la paire de lames flexibles (61, 62, 63, 64) est montée.
- Système d'actionnement selon la revendication 2 ou 3, caractérisé en ce que deux tables de translation (51, 52, 53, 54) consécutives sont agencées tête-bêche l'une par rapport à l'autre.
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 4, caractérisé en ce qu'il comprend un nombre pair de tables de translation (51, 52, 53, 54).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 5, caractérisé en ce que les tronçons rigides (56, 57, 58, 59) sont rallongés pour pourvoir y associer la table de translation (51, 52, 53, 54) suivante.
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 6, caractérisé en ce qu'au moins la partie ressort (35) est définie sensiblement dans un plan de manière à être sensiblement plate, de préférence la partie mobile (37) également, voire aussi la partie fixe (33).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 7, caractérisé en ce qu'au moins la deuxième table de translation (52) est agencée d'un premier côté de la première table de translation (51), qui est opposé à la partie mobile (37).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 8, caractérisé en ce qu'au moins la dernière table de translation (54) est agencée d'un deuxième côté de la première table de translation (51), qui est vers la partie mobile (37).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 9, caractérisé en ce que le tronçon rigide (55) de la table de translation (53) agencée du premier côté, qui est la plus éloignée de la première table de translation (51), s'étend jusqu'à une table de translation (54) agencée du deuxième côté pour former un côté périphérique de la partie ressort (35).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 10, caractérisé en ce que chaque tronçon rigide (56, 57, 58, 59) d'une table de translation (51, 52, 53, 54), s'étend au-delà de la paire de lames flexibles de ladite table de translation (51, 52, 53, 54).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 11, caractérisé en ce que la partie ressort (35) est agencée sous la partie fixe (33).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 12, caractérisé en ce que les lames flexibles des tables de translation (51, 52, 53, 54) de la partie ressort (35) sont sensiblement parallèles en position de repos de l'actionneur (30).
- Système d'actionnement selon l'une, quelconque, des revendications 2 à 13, caractérisé en ce que la partie mobile (37) comprend un crochet (39).
- Système d'actionnement selon l'une, quelconque, des revendications précédentes, caractérisé en ce que l'actionneur (30) est monobloc, l'actionneur (30) étant par exemple obtenu par un procédé de type LIGA ou de type DRIE.
- Mouvement d'horlogerie, caractérisé en ce qu'il comprend système d'actionnement (20) selon l'une, quelconque, des revendications précédentes.
- Pièce d'horlogerie, par exemple une montre, caractérisée en ce qu'elle comprend un mouvement d'horlogerie selon la revendication 16.
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23187222.7A EP4498178A1 (fr) | 2023-07-24 | 2023-07-24 | Système d'actionnement micromécanique à guidage flexible pour l'horlogerie |
| US18/753,281 US20250036079A1 (en) | 2023-07-24 | 2024-06-25 | Micromechanical actuation system with a flexible guide for watchmaking |
| JP2024103926A JP7756203B2 (ja) | 2023-07-24 | 2024-06-27 | 時計製造のための可撓性ガイドを有するマイクロメカニカル作動システム |
| KR1020240091851A KR20250015909A (ko) | 2023-07-24 | 2024-07-11 | 시계제조를 위한 가요성 가이드를 갖는 마이크로기계 작동 시스템 |
| CN202421693653.8U CN222914051U (zh) | 2023-07-24 | 2024-07-17 | 用于钟表机芯的致动系统、钟表机芯和钟表 |
| CN202410959227.2A CN119356055A (zh) | 2023-07-24 | 2024-07-17 | 用于制表业的具有柔性导向件的微机械致动系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23187222.7A EP4498178A1 (fr) | 2023-07-24 | 2023-07-24 | Système d'actionnement micromécanique à guidage flexible pour l'horlogerie |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4498178A1 true EP4498178A1 (fr) | 2025-01-29 |
Family
ID=87473768
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23187222.7A Pending EP4498178A1 (fr) | 2023-07-24 | 2023-07-24 | Système d'actionnement micromécanique à guidage flexible pour l'horlogerie |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250036079A1 (fr) |
| EP (1) | EP4498178A1 (fr) |
| JP (1) | JP7756203B2 (fr) |
| KR (1) | KR20250015909A (fr) |
| CN (2) | CN119356055A (fr) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4006648A1 (fr) * | 2020-11-27 | 2022-06-01 | Omega SA | Ressort-spiral pour mécanisme résonateur d'horlogerie muni de moyens de réglage de la longueur effective dudit ressort-spiral |
| EP4009115A1 (fr) * | 2020-12-02 | 2022-06-08 | Omega SA | Ressort-spiral pour mécanisme résonateur d horlogerie muni de moyens d'ajustement de la rigidité |
| CH718169A2 (fr) * | 2020-12-18 | 2022-06-30 | Omega Sa | Mécanisme résonateur d'horlogerie à guidage flexible muni de moyens d'ajustement de la rigidité. |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10216146B2 (en) * | 2017-07-18 | 2019-02-26 | Patek Philippe Sa Geneve | Indicator actuating organ for a timepiece |
| EP4016193A1 (fr) * | 2020-12-18 | 2022-06-22 | Omega SA | Mecanisme resonateur d' horlogerie a guidage flexible muni de moyens d' ajustement de la rigidite |
| CH719183A2 (fr) * | 2021-11-29 | 2023-06-15 | Omega Sa | Ressort-spiral pour mécanisme résonateur d'horlogerie muni de moyens d'ajustement de la raideur. |
-
2023
- 2023-07-24 EP EP23187222.7A patent/EP4498178A1/fr active Pending
-
2024
- 2024-06-25 US US18/753,281 patent/US20250036079A1/en active Pending
- 2024-06-27 JP JP2024103926A patent/JP7756203B2/ja active Active
- 2024-07-11 KR KR1020240091851A patent/KR20250015909A/ko active Pending
- 2024-07-17 CN CN202410959227.2A patent/CN119356055A/zh active Pending
- 2024-07-17 CN CN202421693653.8U patent/CN222914051U/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4006648A1 (fr) * | 2020-11-27 | 2022-06-01 | Omega SA | Ressort-spiral pour mécanisme résonateur d'horlogerie muni de moyens de réglage de la longueur effective dudit ressort-spiral |
| EP4009115A1 (fr) * | 2020-12-02 | 2022-06-08 | Omega SA | Ressort-spiral pour mécanisme résonateur d horlogerie muni de moyens d'ajustement de la rigidité |
| CH718169A2 (fr) * | 2020-12-18 | 2022-06-30 | Omega Sa | Mécanisme résonateur d'horlogerie à guidage flexible muni de moyens d'ajustement de la rigidité. |
Also Published As
| Publication number | Publication date |
|---|---|
| CN222914051U (zh) | 2025-05-27 |
| US20250036079A1 (en) | 2025-01-30 |
| JP7756203B2 (ja) | 2025-10-17 |
| KR20250015909A (ko) | 2025-02-03 |
| JP2025017323A (ja) | 2025-02-05 |
| CN119356055A (zh) | 2025-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP4009115A1 (fr) | Ressort-spiral pour mécanisme résonateur d horlogerie muni de moyens d'ajustement de la rigidité | |
| EP4016194B1 (fr) | Mecanisme resonateur d'horlogerie a guidage flexible muni de moyens d'ajustement de la rigidite | |
| EP4286962B1 (fr) | Organe réglant d'horlogerie comprenant un système de raquetterie muni de moyens de verrouillage | |
| CH718113B1 (fr) | Ressort-spiral pour mécanisme résonateur d'horlogerie muni de moyens d'ajustement de la rigidité | |
| EP4286960B1 (fr) | Organe réglant d'horlogerie muni d'un système de raquetterie | |
| CH718169A2 (fr) | Mécanisme résonateur d'horlogerie à guidage flexible muni de moyens d'ajustement de la rigidité. | |
| EP4498178A1 (fr) | Système d'actionnement micromécanique à guidage flexible pour l'horlogerie | |
| CH720978A2 (fr) | Système d'actionnement micromécanique à guidage flexible pour l'horlogerie | |
| EP4428627B1 (fr) | Dispositif de reglage autonome de la longueur active d'un spiral | |
| EP4575668A1 (fr) | Ensemble d'horlogerie pour organe réglant muni de moyens d'ajustement de la marche | |
| EP4571426A1 (fr) | Assemblage de deux composants d'horlogerie muni de moyens d'assemblage améliorés | |
| CH720979A2 (fr) | Assemblage de deux composants d'horlogerie muni de moyens d'assemblage | |
| WO2025021799A1 (fr) | Assemblage de deux composants d'horlogerie muni de moyens d'assemblage | |
| EP4498175A1 (fr) | Organe réglant d'horlogerie muni d'un système d'actionnement à crochet | |
| EP4498176A1 (fr) | Organe réglant d'horlogerie muni d'un système d'actionnement linéaire | |
| EP4498174A1 (fr) | Organe réglant d'horlogerie comprenant un système d'actionnement muni d'une bascule de commande | |
| CH721383A2 (fr) | Assemblage de deux composants d'horlogerie muni de moyens d'assemblage | |
| CH721430A2 (fr) | Ensemble d'horlogerie pour organe réglant muni de moyens d'ajustement de la marche | |
| CH720973A2 (fr) | Organe réglant d'horlogerie muni d'un système d'actionnement à crochet | |
| CH720980A2 (fr) | Organe réglant d'horlogerie muni d'un système d'actionnement linéaire | |
| CH720982A2 (fr) | Organe réglant d'horlogerie comprenant un système d'actionnement muni d'une bascule de commande | |
| EP4546057A1 (fr) | Ressort-spiral muni de moyens d'ajustement de la raideur améliorés | |
| EP4428626B1 (fr) | Dispositif de reglage autonome de la longueur active d'un spiral | |
| EP4428628B1 (fr) | Dispositif de reglage autonome de la longueur active d'un spiral | |
| EP4521173A1 (fr) | Dispositif horloger |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: APP_9349/2025 Effective date: 20250225 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20250724 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |