EP4505931A1 - Reinigungsroboter - Google Patents
Reinigungsroboter Download PDFInfo
- Publication number
- EP4505931A1 EP4505931A1 EP23784159.8A EP23784159A EP4505931A1 EP 4505931 A1 EP4505931 A1 EP 4505931A1 EP 23784159 A EP23784159 A EP 23784159A EP 4505931 A1 EP4505931 A1 EP 4505931A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cleaning
- plugging
- machine body
- cleaning head
- cleaning robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/29—Floor-scrubbing machines characterised by means for taking-up dirty liquid
- A47L11/30—Floor-scrubbing machines characterised by means for taking-up dirty liquid by suction
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/29—Floor-scrubbing machines characterised by means for taking-up dirty liquid
- A47L11/30—Floor-scrubbing machines characterised by means for taking-up dirty liquid by suction
- A47L11/302—Floor-scrubbing machines characterised by means for taking-up dirty liquid by suction having rotary tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/32—Carpet-sweepers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/32—Carpet-sweepers
- A47L11/325—Shampoo devices for carpet-sweepers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/32—Carpet-sweepers
- A47L11/33—Carpet-sweepers having means for storing dirt
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
- A47L11/4005—Arrangements of batteries or cells; Electric power supply arrangements
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
- A47L11/4008—Arrangements of switches, indicators or the like
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
- A47L11/4016—Contaminants collecting devices, i.e. hoppers, tanks or the like specially adapted for collecting fluids
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4038—Disk shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4044—Vacuuming or pick-up tools; Squeegees
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4083—Liquid supply reservoirs; Preparation of the agents, e.g. mixing devices
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4088—Supply pumps; Spraying devices; Supply conduits
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4094—Accessories to be used in combination with conventional vacuum-cleaning devices
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/06—Control of the cleaning action for autonomous devices; Automatic detection of the surface condition before, during or after cleaning
Definitions
- the present disclosure relates to the field of smart home technologies, and in particular, relates to a cleaning robot.
- cleaning robots are sweeping robots, and when the cleaning robots perform cleaning tasks, cleaning heads of the cleaning robots are used to achieve effective cleaning of floor.
- the present disclosure provides a cleaning robot to improve the use performance of the cleaning robot.
- the present disclosure provides a cleaning robot.
- the cleaning robot includes:
- the plugging assembly includes:
- the plugging assembly further includes: a driving part, connected to the connection rod to drive the connection rod to rotate relative to the machine body, so that the first plugging member and the second plugging member synchronously close or release the inlet and the outlet of the collection part.
- the plugging assembly further includes: an ejector rod, connected to the connection rod through the first plugging member or the second plugging member, where the driving part is connected to the ejector rod to drive the connection rod to rotate relative to the machine body through the ejector rod.
- the plugging assembly further includes:
- the elastic member is a spring.
- the ejector rod penetrates through the collection part
- the plugging assembly further includes: a sealing member, located between the collection part and the ejector rod.
- connection rod, the first plugging member and the second plugging member are of an integral structure.
- the cleaning head includes a wet cleaning head
- the cleaning system further includes: a liquid supply part, configured to feed a washing liquid to the wet cleaning head.
- the liquid supply part and the collection part are stacked up and down.
- the machine body includes a forward portion, the cleaning system is provided in the forward portion, and the forward portion is substantially of a rectangle shape.
- the cleaning system further includes an auxiliary cleaning head
- the machine body includes a forward portion
- the auxiliary cleaning head is provided at a corner position of the forward portion
- the cleaning robot further includes a driving system
- the machine body further includes a backward portion, at least a part of the driving system is provided in the backward portion, and the driving system includes a first driving wheel module and a second driving wheel module provided along a transverse axis of the machine body; where the transverse axis is perpendicular to a movement direction of the cleaning robot, and a preset angle is formed between the cleaning head and the transverse axis.
- the auxiliary cleaning head is provided on a side of the cleaning head tilted backwards.
- the cleaning robot further includes: a control system, connected to the plugging assembly to control the plugging assembly to close or release the inlet and the outlet of the collection part.
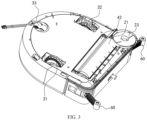
- a cleaning robot includes a machine body 10, a cleaning system 20, a driving system 30, a collection system 40, a plugging assembly 50, a detection system 60, a sensing system 70, a control system 80, an energy system 90, and a human-machine interaction system 100.
- the machine body 10 includes a forward portion 12 and a backward portion 13, and has an approximately circular shape (both the forward portion and the backward portion are circular), and may also have other shapes, including but not limited to an approximate D-shape with a square forward portion and a circular backward portion, and a rectangular or square shape with a square forward portion and a square backward portion.
- the sensing system 70 includes a position determination device 71 provided on the machine body 10, and sensing devices such as a collision sensor provided on a buffer 72 in the forward portion 12 of the machine body 10, a proximity sensor provided on the machine body 10, a cliff sensor provided at a lower part of the machine body, and a magnetometer, an accelerometer, a gyroscope, and an odometer provided in the machine body 10, which are configured to provide various position information and movement state information of the cleaning robot to the control system 80.
- the position determination device 71 includes, but is not limited to, a camera and a laser distance sensor (LDS).
- the forward portion 12 of the machine body 10 may bear the buffer 72.
- the buffer 72 detects one or more events in a travelling path of the cleaning robot via the collision sensor provided thereon.
- the cleaning robot may control, according to the events, such as an obstacle and a wall, detected by the buffer 122, the driving system 30, so that the cleaning robot responds to the events, for example, moving away from the obstacle.
- the control system 80 is provided on a main circuit board in the machine body 10, and includes a computing processor, such as a central processing unit or an application processor, which communicates with a non-temporary memory, such as a hard disk, a flash memory, and a random access memory.
- the application processor draws, by using a positioning algorithm (for example, simultaneous localization and mapping (SLAM)) according to obstacle information fed back by the laser distance sensor, a simultaneous map of the environment where the cleaning robot is located.
- a positioning algorithm for example, simultaneous localization and mapping (SLAM)
- the control system 80 comprehensively determines the current working state, the current position, and the current posture of the cleaning robot, such as crossing a threshold, crawling onto a carpet, being at a cliff, being stuck from above or below, having a full dust box or being picked up, or the like, in combination with distance information and speed information fed back by the sensing devices such as the sensor provided on the buffer 72, the cliff sensor, the magnetometer, the accelerometer, the gyroscope, and the odometer.
- the control system 80 may also give specific next action strategies for different situations, so that the cleaning robot has better sweeping performance and provides better user experience.
- the driving system 30 may control the machine body 10 to travel across the floor based on a driving command with distance and angle information (such as x, y and 8 components).
- the driving system 30 may include a first driving wheel module 31 and a second driving wheel module 32.
- the first driving wheel module 31 and the second driving wheel module 32 are provided along a transverse axis defined by the machine body 10.
- the cleaning robot may include one or more driven wheels 33, and the driven wheels include but are not limited to universal wheels.
- the driving wheel module includes travelling wheels, a driving motor, and a control circuit for controlling the driving motor.
- the driving wheel module may also be connected to a circuit for measuring a driving current and an odometer.
- the driving wheel module may be detachably connected onto the machine body 10, which may be dismounted, mounted and maintained conveniently.
- the driving wheel module may be provided with an offset drop suspension system, which is movably fastened, for example, rotatably attached, to the machine body 10 to receive spring biases that are biased downwards and away from the machine body 10.
- the spring biases allow the driving wheel module to maintain contact and traction with the floor with a certain floor attachment force, and meanwhile a cleaning element of the cleaning robot is also in contact with the floor with a certain pressure.
- the machine body 10 defines the transverse axis and a longitudinal axis.
- the transverse axis and the longitudinal axis are perpendicular to each other, and may be understood as a transverse centerline and a longitudinal centerline of the machine body 10, respectively.
- the energy system 90 includes a rechargeable battery, such as a nickel-hydrogen battery and a lithium battery.
- the rechargeable battery may be connected to a charging control circuit, a battery pack charging temperature detection circuit, and a battery undervoltage monitoring circuit, which are then connected to a single-chip microcomputer control circuit.
- the cleaning robot may be connected to a charging pile for charging via a charging electrode provided on the machine body, such as being provided on the side, the bottom or the top of the machine body.
- the human-machine interaction system 100 may include buttons on a host panel for a user to select functions, and may further include a display screen and/or an indicator light and/or a speaker, which show the current state or function options of the cleaning robot to the user.
- the human-machine interaction system 100 also include a mobile phone client program.
- the mobile phone client may be used to show the user a map of the environment where the cleaning robot is located, and the location of the cleaning robot, thus providing the user with richer and more user-friendly function items.
- the cleaning system 20 is provided on the machine body 10, and includes a cleaning head 21.
- a cleaning head 21 There is a preset angle formed between the transverse axis of the machine body 10 and the cleaning head 21, so that it is possible to reduce the probability that the cleaning head 21 gets stuck by floor joints when the cleaning robot passes through floor environments such as tile joints in an advancing process, thus improving the cleaning efficiency and the use performance of the cleaning robot.
- the preset angle between the transverse axis and the cleaning head 21 may be an acute angle, and may range from 5 degrees to 70 degrees.
- the cleaning system 20 may be a dry cleaning system.
- the dry cleaning system may include the cleaning head 21, a dust box, a fan, an air outlet, etc.
- the cleaning head 21 may be a roller brush rotatable about a shaft parallel to the floor. The roller brush with certain interference with the floor sweeps up garbage on the floor, and rolls it up to the front of a dust suction inlet between the roller brush and the dust box. Then the garbage is sucked into the dust box by air with a suction force, which is generated by the fan and passes through the dust box.
- the dust removal capacity of the cleaning robot may be characterized by the dust pickup (DPU) efficiency for the garbage.
- DUP is affected by the structure and the material of the roller brush, the utilization rate of air in an air passage formed by the dust suction inlet, the dust box, the fan, the air outlet, and connection parts among them, as well as the type and the power of the fan, which is a complex problem of system design.
- the cleaning system 20 may be a wet cleaning system.
- the cleaning head 21 includes a wet cleaning head.
- the cleaning system 20 further includes a liquid supply part 22.
- the liquid supply part 22 feeds a washing liquid into the wet cleaning head.
- the cleaning head 21 may be provided below the liquid supply part 22.
- the cleaning liquid in the liquid supply part 22 is delivered to the cleaning head 21 through a water delivery mechanism, so that the cleaning head 21 performs wet cleaning on a surface to be cleaned.
- the cleaning liquid in the liquid supply part 22 may also be directly sprayed onto the surface to be cleaned, and cleaning of a flat surface is achieved through evenly applying the cleaning liquid by the cleaning head 21.
- the cleaning head 21 may be provided at the bottom of the machine body 10.
- the cleaning head 21 may be a cleaning pad provided parallel to the surface to be cleaned.
- the cleaning head 21 is configured to clean the surface to be cleaned.
- the driving system 30 is configured to drive the cleaning head 21 to basically perform reciprocating motion along a target surface.
- the target surface is a part of the surface to be cleaned.
- the cleaning head 21 performs reciprocating motion along the surface to be cleaned.
- a cleaning cloth or a cleaning plate is provided on a surface of a contact surface between the cleaning head 21 and the surface to be cleaned, and high-frequency friction relative to the surface to be cleaned is generated through reciprocating motion to remove stains on the surface to be cleaned.
- the high-frequency reciprocating motion also known as reciprocating vibration, has a cleaning capability much higher than that of ordinary reciprocating motion, such as rotational friction cleaning.
- the friction frequency is approximate to the frequency of sound waves, and the cleaning effect may be much higher than that of rotational friction cleaning with dozens of revolutions per minute.
- tufts on the surface of the cleaning head 21 may spread more neatly in the same direction under shaking of high-frequency vibration, such that the overall cleaning effect is more uniform, rather than that under the condition of low-frequency rotation, only a downward pressure is applied to increase the friction force to improve the cleaning effect. The downward pressure alone may not enable the tufts to spread approximately in the same direction.
- the cleaning head 21 may also be of a strip-shaped structure, etc.
- the cleaning head 21 may be a roller brush rotatable about an axis parallel to the surface to be cleaned, as shown in FIG. 16 .
- the machine body 10 includes a mounting bracket 11.
- the cleaning head 21 is provided in the mounting bracket 11.
- the mounting bracket 11 is provided with a liquid supply channel.
- the liquid supply part 22 feeds the washing liquid into the wet cleaning head through the liquid supply channel.
- the liquid supply channel may be constituted by a cavity formed in the mounting bracket 11; for example, a part of the mounting bracket 11 is provided to be hollow, so as to form the liquid supply channel for circulating the washing liquid.
- the liquid supply channel may be formed by a pipe body, so as to feed the washing liquid from the liquid supply part 22 to the wet cleaning head, thus ensuring that the cleaning head 21 effectively cleans the surface to be cleaned.
- the liquid supply channel includes a liquid inlet 111 and a liquid outlet 112.
- the liquid inlet 111 is communicated with the liquid supply part 22.
- the liquid outlet 112 is configured to feed the washing liquid into the cleaning head 21.
- the mounting bracket 11 is provided with the liquid inlet 111 and the liquid outlet 112.
- An end of the liquid inlet 111 is provided on an outer surface of the mounting bracket 11.
- the liquid outlet 112 is located on an inner surface of the mounting bracket 11.
- the main body portion of the liquid supply channel may be provided between the liquid inlet 111 and the liquid outlet 112, and the main body portion may be communicated with a plurality of liquid outlets 112 at the same time, so that the liquid outlets 112 are configured to feed the washing liquid into the cleaning head 21.
- an accommodating chamber 113 is formed in the mounting bracket 11.
- the liquid outlet 112 is located on a chamber wall of the accommodating chamber 113.
- the liquid outlet 112 may be arranged at the top or on a side of the accommodating chamber 113, so as to facilitate reliably feeding the washing liquid discharged from the liquid outlet 112 into the cleaning head 21.
- the liquid supply channel may have one liquid inlet 111, and the one liquid inlet 111 corresponds to all liquid outlets 112.
- the liquid supply channel may have at least two liquid inlets 111, and each of the liquid inlets 111 may respectively correspond to a plurality of liquid outlets 112, so as to reliably feed the washing liquid to the wet cleaning head.
- the liquid inlet 111 may be formed by a columnar structure, so as to be connected to a pipe-shaped structure which feeds the washing liquid.
- the liquid outlet 112 may be a rectangular port, a circular port or of other polygonal structure, which is not limited here.
- the plurality of liquid outlets 112 is provided sequentially along the direction parallel to the cleaning head 21.
- the collection system 40 is provided on the machine body 10, and includes a collection part 41.
- the collection part 41 collects residues on the cleaning head 21 and/or the surface to be cleaned, so that the surface to be cleaned can be effectively cleaned, thus ensuring the cleanliness of the surface to be cleaned.
- the cleaning of the surface to be cleaned is achieved through the rotation of the cleaning head 21.
- the residues on the surface to be cleaned may be adsorbed onto the cleaning head 21, and the collection part 41 may collect these residues to ensure the cleanliness of the cleaning head 21.
- the collection part 41 may also collect the residues on the surface to be cleaned, and thus cooperates with the cleaning head 21 to achieve reliable cleaning of the surface to be cleaned.
- the residues may be water, debris, etc., which is not limited here.
- the collection system 42 further includes a scraper 42.
- the scraper 42 is in contact with the cleaning head 21, and removes the residues from the cleaning head 21 by interfering with the cleaning head 21, so that the residues are collected by the collection part 41.
- the cleanliness of the cleaning head 21 is ensured, so as to ensure that the surface to be cleaned is effectively cleaned.
- the scraper 42 may be of a plate-like structure, and the plate-like structure interferes with the cleaning head 21.
- the plate-like structure may remove the residues from the cleaning head 21 during rotation of the cleaning head 21, so that the residues are collected by the collection part 41, thus ensuring that the residues adsorbed from the surface to be cleaned can be collected by the collection part 41 in time.
- the scraper 42 may be provided on the machine body 10.
- the scraper 42 is detachably provided on the machine body 10.
- the scraper 42 is parallel to the cleaning head 21, so that the scraper 42 can remove the residues from the cleaning head 21 reliably and the structure may be mounted conveniently.
- the length of the scraper 42 may be equal to the length of the cleaning head 21. On the basis of ensuring that the scraper 42 can completely interfere with the cleaning head 21, it may be avoided that the scraper 42 occupies the space in the length direction, thus ensuring the compactness of the structure.
- the transverse axis of the machine body 10 is parallel to the cleaning head 21, and parallel to the scraper 42.
- the scraper 42 is provided with a water suction port 421, and the water suction port 421 is communicated with the collection part 41, so that the sewage is reliably collected into the collection part 41 through the water suction port 421 by the collection system 40.
- the water suction port 421 may face towards the cleaning head 21. After the sewage on the cleaning head 21 is scraped off by the scraper 42, the sewage may flow along the scraper 42 and flow towards the water suction port 421, so that the sewage may be sucked into the collection part 41 through the water suction port 421 by the collection system 40.
- the water suction port 421 may be provided on a side of the scraper 42 away from the cleaning head 21. A part of the scraper 42 may be used to gather the sewage together, and the water suction port 421 may suck the gathered sewage into the collection part 41.
- the collection system 40 further includes a power part 43 in pneumatic communication with the collection part 41 to collect the residues to the collection part 41.
- a negative pressure may be generated between the power part 43 and the collection part 41, so that the residues on the surface to be cleaned and the residues on the cleaning head 21 may be sucked into the collection part 41.
- the negative pressure generated between the power part 43 and the collection part 41 may suck the sewage into the collection part 41 through the water suction port 421.
- the power part 43 may be a fan.
- the accommodating chamber 113 is formed in the mounting bracket 11.
- the cleaning head 21 is located in the accommodating chamber 113.
- the collection part 41 is communicated with the accommodating chamber 113, so that the residues enter the collection part 41 after passing through the accommodating chamber 113.
- the mounting bracket 11 is provided with a through hole 114, and the through hole 114 is communicated with the collection part 41 and the accommodating chamber 113.
- the residues scraped off from the cleaning head 21 by the scraper 42 are located in the accommodating chamber 113 of the mounting bracket 11, and the negative pressure generated between the power part 43 and the collection part 41 may suck the residues in the accommodating chamber 113 into the collection part 41 via the through hole 114.
- the accommodating chamber 113 of the mounting bracket 11 may form a relatively sealed space with the surface to be cleaned.
- the negative pressure generated between the power part 43 and the collection part 41 may suck the residues on the surface to be cleaned into the collection part 41 via the through hole 114.
- the collection part 41 includes an inlet 411 and an outlet 412.
- the inlet 411 may be communicated with the accommodating chamber 113.
- the inlet 411 may be communicated with the through hole 114, and the outlet 412 may be communicated with the power part 43, so that the power part 43 provides power through the outlet 412 of the collection part 41 to suck the residues into the inlet 411 of the collection part 41 via the through hole 114 of the accommodating chamber 113, and thus, the residues enter the collection part 41.
- the sewage, debris, etc. carried in the airflow remain in the collection part 41 under the action of gravity. Therefore, when the airflow has a relatively long flow path in the collection part 41, the sewage, debris, etc., may be effectively separated from the airflow.
- the inlet 411 and the outlet 412 of the collection part 41 may be provided on the same side of the collection part 41.
- the inlet 411 and the outlet 412 of the collection part 41 are both provided on a front side of the collection part 41.
- Such an arrangement can effectively extend the flow path of the airflow in the collection part 41, so that sewage, debris, etc., can be separated from the airflow more effectively.
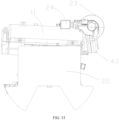
- the plugging assembly 50 of the cleaning robot is provided on the machine body 10.
- a position of at least a part of the plugging assembly 50 is provided to be adjustable so as to close or release the inlet 411 and the outlet 412 of the collection part 41, thus avoiding that the debris in the collection part 41 is poured out from the inlet 411 or enters the power part 43 from the outlet 412.
- the plugging assembly 50 may close the inlet 411 and the outlet 412 of the collection part 41 when the cleaning robot is not in operation, and thus, the problem that the residues are poured out incidentally due to manual movement of the cleaning robot can be avoided.
- the plugging assembly 50 may release the inlet 411 and the outlet 412 of the collection part 41, so that the residues may be sucked into the collection part 41 via the inlet 411.
- the plugging assembly 50 may be controlled by an independent motor, and the control of closing the inlet 411 and the outlet 412 of the collection part 41 may be achieved at any time; for example, closing be achieved when the cleaning robot is not in operation.
- the motor for the plugging assembly 50 may be electrically connected to the control system 80 of the cleaning robot to control the plugging assembly 50 according to the movement state of the cleaning robot fed back by the control system 80.
- the control system 80 controls the cleaning robot to stop operation, it may control the plugging assembly 50 to close the inlet 411 and the outlet 412 of the collection part 41.
- control system 80 when the control system 80 detects that the cleaning robot is in a tilted state, it may control the plugging assembly 50 to close the inlet 411 and the outlet 412 of the collection part 41.
- the control system 80 detects that the cleaning robot is in an idle state for a long period of time, for example, the cleaning robot is stuck in a fixed position during cleaning and thus cannot advance, it may control the plugging assembly 50 to close the inlet 411 and the outlet 412 of the collection part 41 at this time.
- the control system 80 detects that the garbage in the collection part 41 reaches a certain height, it may control the plugging assembly 50 to close the inlet 411 and the outlet 412 of the collection part 41.
- the user may control the plugging assembly 50 by using an App to satisfy use requirements, and may flexibly control the closing of the inlet 411 and the outlet 412 of the collection part 41.
- the plugging assembly 50 includes a connection rod 51, a first plugging member 52 provided on the connection rod 51, and a second plugging member 53 provided on the connection rod 51, where the connection rod 51 is provided movably relative to the machine body 10, so that the first plugging member 52 and the second plugging member 53 close or release the inlet 411 and the outlet 412, respectively. That is, the first plugging member 52 and the second plugging member 53 may close or release the inlet 411 and the outlet 412 synchronously, so as to improve the operating performance of the cleaning robot and ensure that the residues are sucked into the collection part 41 in time.
- the plugging assembly 50 may include a driving part 54.
- the driving part 54 may be a motor.
- the driving part 54 is in driving connection to the connection rod 51, so as to drive the connection rod 51 to rotate, and thus drive the first plugging member 52 and the second plugging member 53 to rotate to close or release the inlet 411 and the outlet 412.
- the first plugging member 52 and the second plugging member 53 are provided on the connection rod 51 at an interval, and located in the middle of the connection rod 51.
- An end of the connection rod 51 is connected to the driving part 54, the other end of the connection rod 51 is provided to extend beyond the second plugging member 53, and the first plugging member 52 is provided between the driving part 54 and the second plugging member 53.
- the first plugging member 52 and the second plugging member 53 are provided at positions of the connection rod 51 close to two opposite ends of the connection rod 51, respectively.
- the first plugging member 52 and the second plugging member 53 are detachably provided on the connection rod 51, or both the first plugging member 52 and the second plugging member 53 are integrally formed on the connection rod 51.
- the driving part 54 may be a cylinder, an oil cylinder or a telescopic motor.
- the driving part 54 may be connected to the connection rod 51, and perform telescopic motion through a telescopic link of the driving part 54; that is, the connection rod 51 may perform telescopic motion.
- the connection rod 51 may move forwards and backwards.
- the first plugging member 52 and the second plugging member 53 may move forward and backward, that is, moving along a direction parallel to a plane where the inlet 411 and the outlet 412 of the collection part 41 are provided, in order to close or release the inlet and 411 and the outlet 412 of the collection part 41.
- the driving part 54 may be a cylinder, an oil cylinder or a telescopic motor, and may be connected to the connection rod 51.
- the driving part 54 performs telescopic movement through a telescopic link thereof, that is, the connection rod 51 may perform telescopic motion.
- the connection rod 51 may move upwards and downwards.
- the first plugging member 52 and the second plugging member 53 may move upwards and downwards, that is, moving along a direction perpendicular to a plane where the inlet 411 and the outlet 412 of the collection part 41 are located, so as to close or release the inlet and 411 and the outlet 412 of the collection part 41.
- the first plugging member 52 and the second plugging member 53 of the plugging assembly 50 may be independently provided on a first driving part and a second driving part.
- the first driving part and the second driving part drive the first plugging member 52 and the second plugging member 53 respectively to move, so as to close or release the inlet 411 and the outlet 412.
- the first driving part and the second driving part may operate synchronously, so that the first plugging member 52 and the second plugging member 53 operate synchronously, so as to synchronously close or release the inlet 411 and the outlet 412.
- Each of the first driving part and the second driving part may be a motor, a cylinder, an oil cylinder or other power mechanism.
- the plugging assembly 50 may include a connection rod 51, a first plugging member 52, a second plugging member 53, a driving part 54, and an ejector rod 55.
- the first plugging member 52 and the second plugging member 53 are connected onto the connection rod 51.
- the ejector rod 55 may be connected to the first plugging member 52.
- the driving part 54 is in driving connection to the ejector rod 55, so that the driving part 54 may drive the ejector rod 55 to move upwards and downwards. In this way, the first plugging member 52 and the second plugging member 53 may move upwards and downwards.
- the connection rod 51 drives the first plugging member 52 and the second plugging member 53 to rotate, so as to synchronously close or release the inlet 411 and the outlet 412.
- the plugging assembly 50 may further include an elastic member 56.
- the elastic member 56 may drive the ejector rod 55 to return to its original position, so that the first plugging member 52 and the second plugging member 53 move from a position where the inlet 411 and the outlet 412 are released to a position where the inlet 411 and the outlet 412 are closed.
- the elastic member 56 may be a spring.
- the spring may be sleeved on the connection rod 51. An end of the spring abuts against the first plugging member 52, and the other end of the spring may be supported on other components of the cleaning robot.
- the other end of the spring may abut against the machine body 10, so that the spring may be pressed tightly when the ejector rod 55 moves upwards, and after the ejector rod 55 loses power, the spring returns to its original position. In this way, the first plugging member 52 and the second plugging member 53 are driven to move from a position where the inlet 411 and the outlet 412 are released to a position where the inlet 411 and the outlet 412 are closed.
- the spring may abut against the first plugging member 52 or the second plugging member 53.
- connection rod 51 When the driving part 54 drives the ejector rod 55 to move upwards, the connection rod 51 may rotate along a first direction, so that the first plugging member 52 and the second plugging member 53 release the inlet 411 and the outlet 412. At this time, the elastic member 56 is pressed tightly.
- the driving part 54 releases the power or the driving part 54 operates reversely for example, the ejector rod 55 moves upwards when the motor rotates forwards, and the driving part 54 may not be fixedly connected to the ejector rod 55 when the motor rotates reversely, the connection rod 51 is driven to rotate along a second direction by a driving force generated when the elastic member 56 restores to its original state, so that the ejector rod 55 is pressed to move downwards.
- the driving part 54 may include a cam mechanism, through which the ejector rod 55 is driven to move upwards. At this time, the ejector rod 55 may be in contact with the cam mechanism, but not fixed.
- the driving part 54 may include an electric push rod, and the electric push rod may only be in insertable connection to the ejector rod 55, but not form an axial fixation. In some embodiments, it is not excluded that the driving part 54 may be fixedly connected to the connection rod 51, and at this time, the elastic member 56 may be cancelled.
- the driving part 54 drives the ejector rod 55 to move upwards.
- the driving part 54 may include a cam mechanism, a gear mechanism, etc., as long as a rectilinear movement may be achieved to push the ejector rod 55 to perform rectilinear movement.
- the plugging assembly 50 may further include a sealing member 57, and the sealing member57 may be provided on the collection part 41. That is, the collection part 41 may be provided with a through hole.
- the ejector rod 55 may pass through the through hole and then is connected to the driving part 54.
- the sealing member57 is configured to plug a gap between a hole wall of the through hole and the ejector rod 55, so as to avoid the sewage flowing out of the collection part 41.
- the ejector rod 55 may move upwards and downwards inside the sealing member 57.
- the sealing member57 may be a sealing ring.
- the collection part 41 may include at least two sub-chambers, a first sub-chamber is used for storing sewage, and a second sub-chamber is an empty chamber in a normal state. Only after the water level in the first sub-chamber reaches a certain value, the sewage may flow into the second sub-chamber. The ejector rod 55 penetrates through the second sub-chamber. Therefore, in the normal state, the problem of liquid leakage will not occur in the second sub-chamber, and the second sub-chamber can be effectively prevented from liquid leakage through the arrangement of the sealing member 57 in the case that there is liquid in the second sub-chamber.
- the ejector rod 55 may support and open the first plugging member 52 and the second plugging member 53.
- the first plugging member 52 and the second plugging member 53 lose the support from the ejector rod 55, and are closed under the action of a spring force.
- a program controls the ejector rod 55 to move, so that the ejector rod 55 cannot support the first plugging member 52 and the second plugging member 53, and under the action of the spring force, the first plugging member 52 and the second plugging member 53 are closed.
- the cleaning system 20 may be provided in the forward portion 12 of the machine body 10, and at least a part of the driving system 30 may be provided in the backward portion 13 of the machine body 10.
- the driven wheel 33 of the driving system 30 may be provided at an edge position of the backward portion 13.
- the forward portion 12 may be substantially of a rectangle shape, and the backward portion 13 may be substantially of a semi-circular shape.
- the cleaning system 20 further includes an auxiliary cleaning head 23, and the auxiliary cleaning head 23 is provided on the machine body 10.
- the cleaning robot can better clean wall edges, wall corners and other areas, thus improving the cleaning effect of the cleaning system 20.
- the auxiliary cleaning head 23 is provided at a corner position of the machine body 10, and a part of the auxiliary cleaning head 23 is provided to extend beyond the machine body 10.
- the part of the auxiliary cleaning head 23 extending beyond the machine body 10 is less than the part of the auxiliary cleaning head 23 provided below the machine body 10, so that on the basis of ensuring the cleaning range of the auxiliary cleaning head 23, the auxiliary cleaning head 23 is prevented from excessively increasing the occupied area of the cleaning robot.
- the machine body 10 includes the forward portion 12 and the backward portion 13.
- the forward portion 12 is substantially a rectangular body. That is, in the case of ignoring fabrication errors, installation errors, etc., a circumferential outer surface of the rectangular body may include corner areas with rounded transitions.
- the rectangular body here is only sued to emphasizes a general structure of the forward portion 12.
- the auxiliary cleaning head 23 is provided at a corner position of the forward portion 12.
- the auxiliary cleaning head 23 is provided at a position of the machine body 10 close to the forward portion 12, and a part of the auxiliary cleaning head 23 extends beyond the buffer 72 for bearing. Even if the cleaning robot is blocked by an obstacle in front, the auxiliary cleaning head 23 can also clean the gap and other parts in front, thus improving the cleaning capability of the cleaning robot.
- a preset angle is formed between the transverse axis of the machine body 10 and the cleaning head 21. That is, the cleaning head 21 is provided obliquely.
- the auxiliary cleaning head 23 is provided on a side of the cleaning head 21 which is tilted backwards, so that the area of the auxiliary cleaning head 23 may be increased. That is, it is possible to make the area of the auxiliary cleaning head 23 relatively larger without excessively increasing the part of the auxiliary cleaning head 23 extending beyond the machine body 10, thus ensuring that the cleaning system 20 has an enough cleaning area.
- the outer edge of the auxiliary cleaning head 23 is substantially circular.
- the auxiliary cleaning head 23 is provided on the side of the cleaning head 21 tilted backwards, so that the auxiliary cleaning head 23 has a relatively larger cleaning area, and a part of the auxiliary cleaning head 23 overlaps with the cleaning head 21.
- a part of the auxiliary cleaning head 23 overlaps with the cleaning head 21. In this way, the problem of missing cleaning between the auxiliary cleaning head 23 and the cleaning head 21 can be avoided on the basis of ensuring that a combination of the auxiliary cleaning head 23 and the cleaning head 21 can increase the cleaning area, thus improving the cleaning effect of the cleaning system 20.
- the outer edge of the auxiliary cleaning head 23 extends beyond the outer edge of the machine body 10. That is, the auxiliary cleaning head 23 can clean positions outside the machine body 10, such as wall edges, wall corners, and other areas, thus increasing the cleaning area of the cleaning system 20 and improving the cleaning performance of the cleaning robot.
- the auxiliary cleaning head 23 includes a wet auxiliary cleaning head 231.
- the liquid supply part 22 feeds the washing liquid into the wet auxiliary cleaning head 231.
- the auxiliary cleaning head 23 may be provided below the liquid supply part 22.
- the cleaning liquid in the liquid supply part 22 is delivered to the auxiliary cleaning head 23 through a water delivery mechanism, so that the auxiliary cleaning head 23 performs wet cleaning on the surface to be cleaned.
- the cleaning system 20 may further include an auxiliary liquid supply channel, through which the liquid supply part 22 feeds the washing liquid into the wet auxiliary cleaning head 231.
- the auxiliary liquid supply channel may be a space formed in the auxiliary cleaning head 23.
- the washing liquid is fed into the wet auxiliary cleaning head 231 through the liquid outlet.
- the auxiliary liquid supply channel may be a liquid feed pipe to feed the washing liquid to the wet auxiliary cleaning head 231.
- the cleaning system 20 further includes a water pump 24.
- the water pump 24 is communicated with the liquid supply part 22, so as to feed the washing liquid from the liquid supply part 22 into at least one of the cleaning head 21 and the auxiliary cleaning head 23.
- the water pump 24 may feed the washing liquid from the liquid supply part 22 to the cleaning head 21 through the liquid supply channel, and/or feed the washing liquid from the liquid supply part 22 to the auxiliary cleaning head 23 through the auxiliary liquid supply channel.
- the one water pump 24 may be communicated with both the liquid supply channel and the auxiliary liquid supply channel.
- the water pump 24 may be a gear pump, a vane pump, a piston pump, a peristaltic pump, or the like.
- the power/flow of the water pump 24 is adjustable.
- the water pump 24 may cooperate with a valve and other devices to control the supply of the washing liquid from the liquid supply part 22 to the cleaning head 21 and the auxiliary cleaning head 23.
- the cleaning head 21 is rotatably provided around a first axis
- the auxiliary cleaning head 23 is rotatably provided around a second axis.
- a certain angle is formed between the first axis and the second axis.
- the cleaning head 21 may be a roller brush for mopping.
- the auxiliary cleaning head 23 may include cloth or wool.
- the washing liquid in the liquid supply part 22 is evenly distributed on the auxiliary cleaning head 23 through the penetration and centrifugal force on the cloth or wool.
- the auxiliary cleaning head 23 may float to a certain extent in the up and down directions.
- the first axis is perpendicular to the second axis. That is, the first axis may be parallel to the surface to be cleaned, and the second axis may be perpendicular to the surface to be cleaned.
- the auxiliary cleaning head 23 may be a side brush.
- the rotation axis of the side brush is at a certain angle relative to the floor, so as to move the residues on the surface to be cleaned into the cleaning area of the cleaning head 21.
- the auxiliary cleaning head 23 may be in the form of a disc brush, a roller brush, or the like.
- the auxiliary cleaning head 23 may further include a main body part 232.
- the wet auxiliary cleaning head 231 is connected onto the main body part 232.
- the main body part 232 is provided on the machine body 10.
- the main body part 232 may include a driving motor.
- the driving motor may drive the wet auxiliary cleaning head 231 to rotate.
- the wet auxiliary cleaning head 231 may include cloth or wool.
- the main body part 232 may include a support structure.
- the support structure may be a tapered soft rubber supporter, so as to transfer a relatively greater torque, and allow the wet auxiliary cleaning head 231 to float to a certain extent in the up and down directions, thus improving the cleaning capability.
- the liquid supply part 22 and the collection part 41 are stacked with each other, so that the space utilization ratio of the cleaning robot may be increased, and the cleaning robot can be prevented from being too large.
- the liquid supply part 22 is located above the collection part 41.
- the liquid supply part 22 may be a clean water tank.
- the collection part 41 may be a sewage tank.
- the clean water tank is located above, so that it can facilitate the supply of the liquid to the cleaning head 21 and the auxiliary cleaning head 23.
- the sewage tank is located below, so that it can facilitate the collection of the residues.
- the clean water tank and the sewage tank may be stacked up and down. That is, as shown in FIG. 15 and FIG. 16 , the liquid supply part 22 and the collection part 41 are stacked up and down.
- the clean water tank may be provided above the sewage tank.
- the clean water tank is located above, so that it can facilitate the supply of the liquid to the cleaning head 21 and the auxiliary cleaning head 23.
- the sewage tank is located below, so that it can facilitate the collection of the residues.
- the clean water tank and the sewage tank is stacked up and down, so that the gravity center of the cleaning robot may not change too much in the horizontal direction, thus ensuring the stability of the cleaning robot and avoiding significant shaking during cleaning.
- the collection part 41 may be located in the middle position of the machine body 10. That is, the collection part 41 may be located on a side of the cleaning system 20 away from the buffer 72 for bearing. In this way, the gravity center of the cleaning robot may not change too much when the amount of water in the collection part 41 changes. Thus, it is ensured that the cleaning robot can stably clean the surface to be cleaned, and the gravity center is stable during use.
- the liquid supply part 22 and the collection part 41 are stacked up and down.
- the liquid supply part 22 is provided with a water inlet 221.
- the collection part 41 is provided with a drainage port 413.
- the water inlet 221 in the liquid supply part 22 is configured to inject clean water into the liquid supply part 22.
- the drainage port 413 in the collection part 41 is configured to discharge sewage in the collection part 41 out of the collection part 41.
- the water inlet 221 may be provided on a side of the liquid supply part 22.
- the drainage port 413 may be provided on a side of the collection part 41.
- two interfaces may be provided on the bottom or the side of the machine body 10, and the two interfaces may be configured to be connected to a clean water injection structure and a sewage discharge structure.
- the two interfaces need to be in a plugged state, so as to avoid water leakage.
- the water inlet 221 and the drainage port 413 may be plugged with seals.
- the liquid supply part 22 and the collection part 41 may be simultaneously removed from the machine body 10.
- the liquid supply part 22 is connected to the collection part 41, so that the liquid supply part 22 and the collection part 41 may be removed from the machine body 10 synchronously.
- the liquid supply part 22 and the collection part 41 may be removed from the machine body 10, so as to achieve liquid injection of the liquid supply part 22 and sewage discharge of the collection part 41.
- the collection part 41 may be a special-shaped structure, and may include a main body 414 and an extension part 415 connected to the main body 414.
- the main body 414 and the extension part 415 together form a chamber for collecting the sewage.
- the main body 414 may be substantially a rectangular body.
- the extension part 415 is an irregular special-shaped structure.
- the extension part 415 may be substantially divided into a triangle and a rectangle, or a semicircle and a rectangle, etc., which is not limited here.
- the space of the extension part 415 for accommodating the sewage is smaller than the space of the main body 414 for accommodating the sewage.
- a plurality of cliff sensors may be provided on the machine body 10.
- the plurality of cliff sensors may be provided around circumferential edge positions of the machine body 10.
- the auxiliary cleaning head 23 is located at the corner position of the machine body 10, a cliff sensor may be provided at a position of the machine body 10 close to the auxiliary cleaning head 23, and at least two cliff sensors may be provided at the position of the machine body 10 close to the auxiliary cleaning head 23.
- the cliff sensors may identify the surface to be cleaned to determine the physical characteristics of the surface to be cleaned, including the surface material, the degree of cleanliness, etc.
- the control system 80 may control the operating state of the auxiliary cleaning head 23 according to the identification result of the cliff sensor to ensure the cleaning function of the auxiliary cleaning head 23.
- the auxiliary cleaning head 23 may be controlled to increase humidity, so as to ensure the cleaning effect.
- the auxiliary cleaning head 23 may be controlled to reduce humidity, so as to prevent from wetting the carpet.
- the detection system 60 of the cleaning robot is provided on the machine body 10. At least a part of the detection system 60 extends out from the outer edge of the machine body 10, so as to increase the detection range of the detection system 60 and thus increase the flexible adjustment capability of the cleaning robot.
- the detection system 60 may be an ultrasonic sensor, an infrared sensor or other sensors, and is configured to detect the material change of the surface to be cleaned, the level change of the surface to be cleaned, or to detect dirt.
- the detection system 60 is provided movably relative to the machine body 10, so that the position of the detection system 60 can be reliably adjusted to adapt to different application environments.
- the detection system 60 may achieve position adjustment under the driving of the driving mechanism.
- the detection system 60 may include a flexible mechanism, and achieve position adjustment by deforming the flexible mechanism.
- the detection system 60 is retractably provided on the machine body 10, and has an extended state and a retracted state.
- the detection system When the detection system is extended to the front of the cleaning robot, it may detect the floor condition in front of the cleaning robot.
- the detection system 60 may be provided near the corner of the cleaning robot, so that it is convenient for the detection system 60 to detect the floor condition in front or on the side in the retracted state.
- the detection system 60 When the cleaning robot is circular, the detection system 60 may be provided at the front of the cleaning robot.
- the detection system 60 may extend out from the outer edge of the machine body 10, so that the detection system 60 has a retracted state in which the detection system 60 is retracted in the machine body 10 and an extended state in which the detection system 60 extends out from the machine body 10.
- the control system 80 can control the movement of the detection system 60 between the retracted state and the extended state. In this way, the detection system 60 can be adjusted in real time according to the operating state or the operating path of the cleaning robot, thus ensuring that the detection system 60 can accurately determine the state of the surface to be cleaned.
- the driving system 30 may drive the cleaning robot to operate on a working surface.
- the control system 80 can drive the detection system 60 to move from the retracted state to the extended state, so that the detection system 60 can monitor the state of the working surface in real time.
- the detection system 60 has a detection viewing angle towards the working surface, and thus may precisely detect the state of the working surface, such as the material change of the working surface, the level change of the working surface, or may detect dirt.
- the detection system 60 may be connected to the corner position of the machine body 10.
- the auxiliary cleaning head 23 may be provided at a position of the machine body 10 close to the detection system 60.
- the detection system 60 may identify the surface to be cleaned in advance, so as to determine the physical characteristics of the surface to be cleaned, including the surface material, the degree of cleanliness, etc.
- the control system 80 may control the operating state of the auxiliary cleaning head 23 according to the identification result of the detection system 60, so as to ensure the cleaning function of the auxiliary cleaning head 23.
- the auxiliary cleaning head 23 may be controlled to increase humidity, so as to ensure the cleaning effect.
- the auxiliary cleaning head 23 may be controlled to reduce humidity, so as to prevent from wetting the carpet.
- the detection system 60 is retractably provided in the forward portion 12 of the machine body 10, so that the detection system 60 may determine the state of the surface to be cleaned earlier, and feed it back to the control system 80. In this way, the control system 80 may adjust the travelling route and the cleaning mode of the cleaning robot according to the information fed back by the detection system 60.
- the detection system 60 is provided at the corner position of the forward portion 12, so that the detection system 60 may be arranged reasonably and is prevented from occupying a relatively larger area, and the detection system 60 can reliably monitor the state of the working surface at the corner of the machine body 10, thus ensuring that the cleaning robot can clean the working surface more efficiently.
- At least one detection system 60 is provided adjacent to the auxiliary cleaning head 23, and at least a part of the detection system 60 is provided directly above the auxiliary cleaning head 23.
- the detection system 60 can be prevented from interfering with the auxiliary cleaning head 23, and the corner position of the machine body 10 can be utilized to a greater extent.
- the mounting positions of the detection system 60 and the auxiliary cleaning head 23 can be reasonably arranged.
- the control system 80 may be connected to the detection system 60.
- the control system 80 may control the extended state and the retracted state of the detection system 60.
- the control system 80 may control the detection system 60 to move from the retracted state to the extended state.
- the control system 80 may control the detection system 60 to move from the extended state to the retracted state.
- the control system 80 controls the working state of the cleaning system 20 or the driving system 30 to change.
- the working surface is the surface to be cleaned.
- the control system 80 may control the driving system 30 to decelerate, and the control system 80 may also control the cleaning system 20 to rotate at a decreasing speed.
- the control system 810 may control the driving system 30 to accelerate, and the control system 80 may also control the cleaning system 20 to rotate at an increased speed.
- the detection system 60 may be configured to detect the material change of the surface to be cleaned and the level change of the surface to be cleaned, or to detect dirt and then feed it back to the control system 80 to control the operating sate of the cleaning robot. For example, when the detection system 60 detects that there is a relatively larger amount of dirt on the surface to be cleaned, the control system 80 may control the cleaning robot to slow down, so as to ensure that the cleaning system 20 can better clean the surface to be cleaned. Alternatively, when the detection system 60 detects that the surface to be cleaned is a floor board, the control system 80 may control the water pump 24 to increase the flow of the washing liquid fed from the liquid supply part 22 to the cleaning head 21 and the auxiliary cleaning head 23, so as to ensure reliable cleaning of the floor.
- the control system 80 may adjust the travelling route and the cleaning mode of the cleaning robot according to the information fed back by the detection system 60.
- the detection system 60 may be provided in front of the machine body 10.
- the detection system 60 may determine the state of the surface to be cleaned earlier, and feed it back to the control system 80, so that the control system 80 may adjust the travelling route and the cleaning mode of the cleaning robot according to the information fed back by the detection system 60.
- the detection system 60 may detect the change of the floor material earlier. For example, when the floor material changes from floor board to carpet, the detection system 60 may provide relevant information to the control system 81 in time, so that the control system 80 can control the travelling direction or the cleaning mode of the cleaning robot in time.
- the cleaning robot is controlled to slow down when the floor material changes from floor board to carpet, or the cleaning robot is controlled to reduce the amount of the liquid supplied to the cleaning head 21 and the auxiliary cleaning head 23 when the floor material changes from floor board to carpet.
- there may be a plurality of detection systems 60 so that the detection range of the detection system 60 may be enlarged.
- the working state of the cleaning system 20 or the driving system 30 may be assisted precisely.
Landscapes
- Cleaning In General (AREA)
- Cleaning By Liquid Or Steam (AREA)
- Electric Vacuum Cleaner (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210368903.XA CN116919256A (zh) | 2022-04-08 | 2022-04-08 | 清洁机器人 |
| PCT/CN2023/082524 WO2023193595A1 (zh) | 2022-04-08 | 2023-03-20 | 清洁机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4505931A1 true EP4505931A1 (de) | 2025-02-12 |
| EP4505931A4 EP4505931A4 (de) | 2026-04-22 |
Family
ID=88243961
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23784159.8A Pending EP4505931A4 (de) | 2022-04-08 | 2023-03-20 | Reinigungsroboter |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP4505931A4 (de) |
| JP (1) | JP7854065B2 (de) |
| KR (1) | KR20240172201A (de) |
| CN (1) | CN116919256A (de) |
| AU (1) | AU2023248966B2 (de) |
| WO (1) | WO2023193595A1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119112053B (zh) * | 2024-11-08 | 2025-01-28 | 深圳市杰深科技有限公司 | 一种清洗机及其清洗方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2574265B1 (de) * | 2007-05-09 | 2015-10-14 | iRobot Corporation | Kompakter Roboter mit autonomer Reichweite |
| JP2011229846A (ja) * | 2010-04-30 | 2011-11-17 | Toshiba Corp | 電気掃除機及びその集塵方法 |
| JP2013017666A (ja) * | 2011-07-12 | 2013-01-31 | Panasonic Corp | 室内用集塵装置およびこの装置を機能させるためのプログラム |
| CN103829877B (zh) * | 2012-11-20 | 2017-01-18 | 深圳市恒润晖光电科技有限公司 | 具有可弹性升降滚刷的自走吸尘器及其滚刷架单元 |
| US9282867B2 (en) * | 2012-12-28 | 2016-03-15 | Irobot Corporation | Autonomous coverage robot |
| JP5892098B2 (ja) * | 2013-03-25 | 2016-03-23 | 三菱電機株式会社 | 自走式掃除機 |
| DE102015114775A1 (de) * | 2015-09-03 | 2017-03-09 | Wessel-Werk Gmbh | Saugroboter |
| JP6851465B2 (ja) * | 2016-08-30 | 2021-03-31 | 深▲セン▼市智意科技有限公司 | 汚水タンクの密封構造 |
| US10456002B2 (en) * | 2016-12-22 | 2019-10-29 | Irobot Corporation | Cleaning bin for cleaning robot |
| CN212066637U (zh) * | 2020-03-03 | 2020-12-04 | 东莞芯速科技有限公司大岭山分公司 | 一种清洁机器人的防漏集尘盒 |
| CN112545385A (zh) * | 2020-12-24 | 2021-03-26 | 珠海格力电器股份有限公司 | 集尘盒及扫地机器人 |
| CN215687468U (zh) * | 2021-05-11 | 2022-02-01 | 广东旺家智能机器人有限公司 | 净气结构及具有其的扫地机 |
| US12178384B2 (en) * | 2021-06-11 | 2024-12-31 | Irobot Corporation | Brush for autonomous cleaning robot |
| CN218186633U (zh) * | 2021-09-03 | 2023-01-03 | 北京顺造科技有限公司 | 自动清洁设备的清理装置及自动清洁设备 |
| CN217365718U (zh) * | 2022-04-08 | 2022-09-06 | 北京石头世纪科技股份有限公司 | 清洁机器人 |
| CN217338454U (zh) * | 2022-04-08 | 2022-09-02 | 北京石头世纪科技股份有限公司 | 清洁机器人 |
| CN217365717U (zh) * | 2022-04-08 | 2022-09-06 | 北京石头世纪科技股份有限公司 | 清洁机器人 |
| CN217365716U (zh) * | 2022-04-08 | 2022-09-06 | 北京石头世纪科技股份有限公司 | 清洁机器人 |
| CN218044978U (zh) * | 2022-04-08 | 2022-12-16 | 北京石头世纪科技股份有限公司 | 清洁机器人 |
-
2022
- 2022-04-08 CN CN202210368903.XA patent/CN116919256A/zh active Pending
-
2023
- 2023-03-20 WO PCT/CN2023/082524 patent/WO2023193595A1/zh not_active Ceased
- 2023-03-20 EP EP23784159.8A patent/EP4505931A4/de active Pending
- 2023-03-20 AU AU2023248966A patent/AU2023248966B2/en active Active
- 2023-03-20 KR KR1020247036419A patent/KR20240172201A/ko active Pending
- 2023-03-20 JP JP2024558114A patent/JP7854065B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN116919256A (zh) | 2023-10-24 |
| AU2023248966B2 (en) | 2026-04-02 |
| JP2025511230A (ja) | 2025-04-15 |
| JP7854065B2 (ja) | 2026-04-30 |
| EP4505931A4 (de) | 2026-04-22 |
| KR20240172201A (ko) | 2024-12-09 |
| AU2023248966A1 (en) | 2024-11-21 |
| WO2023193595A1 (zh) | 2023-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP4505929A1 (de) | Reinigungsroboter | |
| EP4388962A1 (de) | Basisstation und reinigungsrobotersystem | |
| EP4011265A1 (de) | Verschlussstopfen und intelligente reinigungsvorrichtung | |
| CN218044978U (zh) | 清洁机器人 | |
| CN217365718U (zh) | 清洁机器人 | |
| CN217365716U (zh) | 清洁机器人 | |
| EP4505932A1 (de) | Roboterstaubsauger | |
| EP4505930A1 (de) | Reinigungsroboter | |
| IL324648A (en) | Cleaning robot | |
| CN217365717U (zh) | 清洁机器人 | |
| CN217338454U (zh) | 清洁机器人 | |
| EP4505931A1 (de) | Reinigungsroboter | |
| CN215838851U (zh) | 基站和清洁机器人系统 | |
| EP4505928A1 (de) | Reinigungsroboter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20241031 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20260323 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A47L 11/30 20060101AFI20260317BHEP Ipc: A47L 11/24 20060101ALI20260317BHEP Ipc: A47L 11/32 20060101ALI20260317BHEP Ipc: A47L 11/33 20060101ALI20260317BHEP |