EP4509451A1 - Überwachungsverfahren und -vorrichtung für eine personentransportanlage - Google Patents
Überwachungsverfahren und -vorrichtung für eine personentransportanlage Download PDFInfo
- Publication number
- EP4509451A1 EP4509451A1 EP23191817.8A EP23191817A EP4509451A1 EP 4509451 A1 EP4509451 A1 EP 4509451A1 EP 23191817 A EP23191817 A EP 23191817A EP 4509451 A1 EP4509451 A1 EP 4509451A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- operating parameters
- information processing
- exception
- escalator
- monitoring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0037—Performance analysers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0018—Devices monitoring the operating condition of the elevator system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0018—Devices monitoring the operating condition of the elevator system
- B66B5/0025—Devices monitoring the operating condition of the elevator system for maintenance or repair
Definitions
- the present disclosure relates to the technical field of passenger transportation systems embodied as elevators, escalators, or moving walks, in particular to a monitoring method and device, and a fault predicting method, device and equipment.
- the present disclosure provides a monitoring method for a passenger transportation system, which is embodied as an elevator, escalator, or moving walk and a device for a passenger transportation system embodied as an elevator, escalator, or moving walk, and a fault predicting method for a passenger transportation system embodied as an elevator, escalator, or moving walk, a device for a passenger transportation system embodied as an elevator, escalator, or moving walk and an equipment for a passenger transportation system embodied as an elevator, escalator, or moving walk.
- a monitoring method for a passenger transportation system which is embodied as an elevator, escalator, or moving walk applied in a monitoring device
- the monitoring device includes a plurality of information processing modules
- the monitoring method includes:
- the first preset operation includes:
- At least one of the information processing modules includes at least one first register and a plurality of second registers, and at least one of the operating parameters includes a temperature parameter, a humidity parameter, and a vibration parameter; the storing the read operating parameters into different registers through the main thread respectively includes:
- a plurality of information processing modules include a first information processing module and a second information processing module, the first information processing module includes at least one first registers and a plurality of second registers, the second information processing module includes a third register, and at least one of the operating parameters further includes a system fault code and a distance parameter between a handrail belt of the system and a reference point; the storing the read operating parameters into different registers through the main thread respectively further includes executing the following steps by the first information processing module:
- the flag bit used to indicate the exception type in the first register includes at least one of a speed exception flag bit, a controller exception flag bit, a motor exception flag bit, a deceleration gearbox exception flag bit, and a handrail system exception flag bit; and the updating the flag bit used to indicate the exception type in the first register based on the existing exception when the distance parameter is exceptional includes: when the read operating parameters reach a predetermined threshold, determining that the operating parameters are exceptional and setting the flag bit in the first register that matches the exception type into a first value.
- the system monitoring method further includes: when at least one of the operating parameters is determined to be invalid data, resetting at least the sensor that collects the at least one of the operating parameters.
- At least one read thread includes a read thread for a vibration sensor and a read thread for a temperature and humidity sensor, the read thread for the vibration sensor has a higher priority than the read thread for the temperature and humidity sensor, and the main thread has a higher priority than the read thread for the vibration sensor.
- At least one read thread further includes a read thread for a fault code, and the read thread for the fault code has a priority between the read thread for the vibration sensor and the read thread for the temperature and humidity sensor; and/or at least one read thread further includes a data read thread for a distance sensor, and the data read thread for the distance sensor has a priority between the read thread for the vibration sensor and the read thread for the temperature and humidity sensor.
- the first preset operation further includes:
- the polling the operating parameters stored in the plurality of information processing modules and determining at least one exceptional operating parameter and its exception time information based on the polling results to obtain the system monitoring data includes:
- the plurality of operating parameters further include electrical parameters which are read and stored by an electronic energy meter; and the polling the operating parameters stored in the plurality of information processing modules and determining at least one exceptional operating parameter and its exception time information based on the polling results to obtain the system monitoring data, further includes:
- the publishing the system monitoring data to a message forwarding server end includes: obtaining the system fault code in the third register of the second information processing module, packaging and forwarding the system monitoring data and the system fault code through MQTT.
- a fault predicting method for a passenger transportation system embodied as an elevator, escalator, or moving walk applied in a system fault predicting device including:
- the method further includes a training step for the support vector machine model, and the training step includes:
- a system fault predicting method for a passenger transportation system embodied as an elevator, escalator, or moving walk applied in a system fault predicting device wherein the system fault predicting device includes a monitoring device and a system fault predicting device, and the monitoring device comprises a plurality of information processing modules, wherein the fault predicting method includes the following steps executed by the monitoring device comprising a plurality of information processing modules:
- a monitoring device for a passenger transportation system embodied as an elevator, escalator, or moving walk
- the monitoring device includes a plurality of sensors, a plurality of information processing modules, a monitoring module, and a forwarding module, wherein:
- a fault predicting device for a passenger transportation system embodied as an elevator, escalator, or moving walk
- the fault predicting device includes a first obtaining module and a predicting module, wherein:
- a fault predicting equipment for a passenger transportation system embodied as an elevator, escalator, or moving walk
- the fault predicting equipment includes a monitoring device and a system fault predicting device
- the monitoring device includes a plurality of sensors, a plurality of information processing modules, a monitoring module, and a forwarding module
- the system fault predicting device includes a first obtaining module and a predicting module, wherein:
- a computer-readable storage medium on which executable instructions are stored wherein the instructions, when executed by a processor, cause the processor to perform the monitoringmethod as described above or the predicting method as described above.
- a computer program product including a computer program is provided, wherein the computer program, when executed by a processor, implements the monitoring method as described above or the predicting method as described above.
- the information processing module and the monitoring module are used to process the real-time data collected by the sensor in two phases, and the system monitoring data including the exception time information is obtained. Therefore, it is not necessary for the monitoring device to upload a large amount of real-time data, and the monitoring device may adapt to a bandwidth limitation of a message forwarding mechanism, so that an interaction between the monitoring device and the system fault predicting device may be achieved through the message forwarding mechanism, thereby ensuring a fast communication between the front-end monitoring device and the cloud-based system fault predicting device.
- the system monitoring data including exceptional flags and exception time information, may be directly used to predict the system fault by the SVM. Compared with a scheme in which operating parameters are directly uploaded, the system monitoring data generated by the embodiments of the present disclosure may enable the SVM to predict the system fault more quickly and accurately, thereby achieving more effective proactive prevention.
- an escalator monitoring method, an escalator fault predicting method, device, equipment, storage medium and program product relate to the technical field of escalators.
- operations on personal information such as collecting, storing, using, processing, transmitting, provision, disclosure, and application, are all in compliance with relevant laws and regulations, necessary confidentiality measures have been taken, and they do not violate the public order and good customs.
- An embodiment of the present disclosure provides an escalator monitoring method, which is applied to an escalator monitoring device including a plurality of information processing modules.
- the escalator monitoring method includes: collecting a plurality of operating parameters of an escalator; executing a first preset operation by at least one of the information processing modules to store operating parameters that are currently collected, wherein there is at least one different operating parameter that is stored between any two ones of the information processing modules; polling the operating parameters that have been stored in the information processing modules and determining at least one exceptional operating parameter and its exception time information based on a polling result to obtain escalator monitoring data; and publishing the escalator monitoring data to a message forwarding server end, wherein the escalator monitoring data is configured to enable the escalator fault predicting device to predict an escalator fault based on a support vector machine (SVM) according to the escalator monitoring data.
- SVM support vector machine
- the escalator monitoring device may adapt to a bandwidth limitation of a message forwarding mechanism, so that an interaction between the escalator monitoring device and the escalator fault predicting device may be achieved through the message forwarding mechanism, thereby ensuring a fast communication between the front-end escalator monitoring device and the cloud-based escalator fault predicting device.
- the escalator monitoring data including exceptional flags and exception time information, may be directly used to predict the escalator fault by the SVM.
- the escalator monitoring data generated by the embodiments of the present disclosure may enable the SVM to predict the escalator fault more quickly and accurately, thereby achieving more effective proactive prevention.
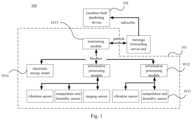
- Fig. 1 schematically shows the application scenario of the escalator monitoring method, the escalator fault predicting method, device, equipment, storage medium, and program product according to embodiments of the present disclosure.
- the application scenario according to the embodiment may include the escalator monitoring device 100 which includes an escalator monitoring device 101 at the front-end and an escalator fault predicting device 102 at the back-end.
- the escalator monitoring device 101 may include a plurality of sensors 1011, a plurality of information processing modules 1012, and a monitoring module 1013.
- the sensors 1011 are used to collect real-time operating parameters of the escalator
- the information processing modules 1012 are used to collect and process the operating parameters collected by the sensors 1011
- the monitoring module 1013 is used to extract information such as exception time information from real-time data stored in the monitoring information processing modules 1012 and summarize the information into escalator monitoring data.
- the information processing modules 1012 may have a processor and a storage, respectively.
- the monitoring module 1013 is also used to publish the escalator monitoring data to a message forwarding server so that the escalator fault predicting device 102 may subscribe to relevant topics from the message forwarding end to consume a message so as to predict an escalator fault.
- the plurality of sensors 1011 may include a temperature and humidity sensor 1011, a ranging sensor 1011, a vibration sensor 1011, etc.
- the temperature and humidity sensor 1011 may obtain a temperature and a humidity in an escalator machine room as well as a temperature and a humidity surrounding the escalator.
- the ranging sensor 1011 may obtain an extent of tightness of an escalator handrail.
- the vibration sensor 1011 may obtain vibration data of components such as an escalator motor and a gearbox.
- the information processing modules 1012 and the monitoring module 1013 may be networked through the Modbus protocol. After processing and summarizing the above data (i.e., operating parameters), the information processing modules 1012 communicate with the monitoring module 1013 through the Modbus protocol.
- the escalator monitoring device 101 may further include an electronic energy meter 1014, which may obtain electrical parameters during an operation of the escalator, such as power parameters.
- the electronic energy meter 1014 may communicate directly with the monitoring module 1013 via the Modbus protocol.
- Modbus is a serial communication protocol widely used in industrial field. It is an open and free bus protocol with simple data frame format and easy user operation.
- Modbus protocol has a master/slave architecture, where one node is the master and the other nodes that communicate using the Modbus protocol are slaves. Each slave device has a unique address.
- the monitoring module 1013 serves as the master and is connected to three slaves, including the electronic energy meter 1014 and at least two information processing modules 1012.
- the information processing modules 1012 may also be configured with a second Modbus interface, so that the information processing module 1012 may act as the master and communicate with an escalator control system (acting as the slave) via the Modbus protocol to obtain fault codes of the escalator.
- the escalator monitoring device 101 may be provided at the front-end, for example, embedded in an escalator equipment.
- the escalator fault predicting device 102 may be provided at the back-end, for example, provided in a cloud server.
- the server may provide various services, such as a backend management server supporting websites browsed by users using terminal devices (provided as an example only).
- the backend management server can analyze and process user requests and other data, and feedback processing results (such as obtaining or generating pages, information, or data based on user requests) to terminal devices.
- the escalator monitoring method provided by some embodiments of this disclosure may generally be executed by the escalator monitoring device 101, and the escalator fault predicting method provided by some embodiments may be executed by the escalator fault predicting device 102.
- the escalator monitoring method according to some embodiments of the present disclosure will be described in detail below based on the scenario described in Fig. 1 through Figs. 2 to 9 .
- the escalator monitoring method according to the embodiments is applied to the escalator monitoring device 101, which includes a plurality of information processing modules 1012.
- Fig. 2 schematically shows a flowchart of the escalator monitoring method according to an embodiment of the present disclosure.
- the escalator monitoring method includes steps S210 to S240.
- steps in Fig. 2 are displayed sequentially according to arrows, these steps are not necessarily executed in the order indicated by the arrows. Unless otherwise specified in this document, the execution of these steps is not strictly limited to a specific order and may be executed in a different order. Moreover, at least some of the steps in the drawings may include a plurality of sub-steps or stages, which may not be completed at the same time but may be executed at different times, and their execution order may not necessarily be sequential but may alternate with at least some of the sub-steps or stages of other steps.
- step S210 a plurality of operating parameters of the escalator are collected.
- a plurality of sensors 1011 may be used to collect a plurality of operating parameters of the escalator, including temperature and humidity parameters, vibration parameters, and distance parameters used to determine the extent of tightness of the escalator handrail. In the embodiment, these operating parameters may be combined to determine whether there is any exception in relevant functions of the escalator so as to generate escalator monitoring data for predicting an escalator fault.
- step S220 a first preset operation is executed by at least one of the plurality of information processing modules 1012 to store the operating parameters that are currently collected, wherein there is at least one different operating parameter that is stored between any two ones of the information processing modules.
- the first preset operation may include collecting, processing, and storing the operation parameters collected by the sensors 1011.
- the plurality of sensors 1011 and the plurality of information processing modules 1012 are networked through the Modbus protocol.
- each information processing module 1012 may collect and store operation parameters collected by the plurality of sensors 1011. Different information processing modules 1012 may collect operation parameters from different sensors 1011.
- the plurality of information processing modules 1012 may include a first information processing module 1012 and a second information processing module 1012.
- the first information processing module 1012 may collect operation parameters from a proximal end of the escalator, such as temperature and humidity parameters near the escalator and distance parameters between a handrail surface and a preset reference point for determining the extent of tightness of the handrail.
- the second information processing module 1012 may collect temperature and humidity parameters in the machine room and fault codes from the escalator control system.
- the information processing modules 1012 may firstly determine whether the operation parameters are exceptional (e.g., too high or too low), and when there are exceptional operation parameters, corresponding exceptional flags are made, and the exception flags, the operation parameters corresponding to the exception as well as other operation parameters that are collected at the same time may be stored together.
- exceptional e.g., too high or too low
- step S230 the operating parameters that have been stored in the plurality of information processing modules 1011 are polled, and at least one exceptional operating parameter and its exception time information are determined based on polling results to obtain escalator monitoring data.
- the monitoring module 1013 may poll the plurality of information processing modules 1012. For at least one information processing module 1012, exceptions may be determined based on the exception flags stored in the information processing module 1012, and exceptional operating parameters may be determined from the operating parameters stored at the same time as the exception flags. For the exceptional operating parameters, a single exceptional duration and an accumulated exceptional duration may be calculated. The exception time information of the operating parameters may include the single exceptional duration and the accumulated exceptional duration. Moreover, the escalator monitoring data may include the exception time information of the operating parameters.
- a duration when the temperature and humidity parameters exceed a preset value may be recorded to obtain the single exceptional duration of the temperature and humidity parameters.
- the obtained single exceptional duration is added to a previous total exceptional duration to obtain the accumulated exceptional duration.
- step S240 the escalator monitoring data is published to a message forwarding server end, wherein the escalator monitoring data is configured to enable the escalator fault predicting device 102 to predict an escalator fault based on a support vector machine (SVM) according to the escalator monitoring data.
- SVM support vector machine
- the message forwarding between the monitoring module 1013 and the escalator fault predicting device 102 may be performed through MQTT.
- the monitoring module 1013 may package and publish the escalator monitoring data to a specified topic of the escalator fault predicting device, and the escalator fault predicting device 102 may subscribe to the topic and consume the message.
- the real-time data collected by the sensor 1011 is processed in two stages by using the information processing module 1012 and the monitoring module 1013 to obtain the escalator monitoring data that includes the exception time information.
- the escalator monitoring device specifically, the monitoring module 1013
- the escalator monitoring device may adapt to a bandwidth limitation of a message forwarding mechanism, so that an interaction between the monitoring module 1013 and the escalator fault predicting device 102 may be achieved through the message forwarding mechanism, thereby ensuring a fast communication between the front-end monitoring module 1013 and the back-end escalator fault predicting device 102.
- the escalator monitoring data may be directly used to predict the escalator fault by the SVM.
- the escalator monitoring data generated by the embodiments of the present disclosure may more accurately reflect an operating status of the escalator, so as to enable the SVM to predict the escalator fault more quickly and accurately, thereby achieving more effective proactive prevention.
- Fig. 3 schematically shows a flowchart of the first preset operation according to an embodiment of the present disclosure.
- the first preset operation may include steps S221 to S223.
- step S221 at least one read thread is created for at least one operating parameters.
- a read thread may be dynamically created by the information processing modules 1012 based on an idle thread and a completed thread. For example, a read thread for the temperature and humidity sensor 1011 and a read thread for the vibration sensor 1011 may be created.
- step S222 the operating parameters are read through at least one read thread from the sensors 1011 that collect the operating parameters.
- different read threads may be selectively created by the plurality of information processing modules 1012 based on different sensors 1011.
- the plurality of information processing modules 1012 include a first information processing module 1012 and a second information processing module 1012.
- the first information processing module 1012 may create a read thread for a laser sensor 1011 to read the distance parameter between the surface of the escalator handrail and the preset reference point, where the distance parameter may be used to determine the extent of tightness of the escalator handrail.
- the second information processing module 1012 can create a read thread for an escalator controller to read fault codes from the moving escalator controller.
- the second information processing module 1012 reads the fault codes from the escalator controller, and the SVM predicts a fault based on the exception time information of the operational parameters and compares it with the read fault codes for training. After the SVM training is completed, the second information processing module 1012 no longer reads the fault codes from the escalator controller, and the SVM can predict the fault solely based on the exception time information of the operational parameters.
- step S223 the read operating parameters are respectively stored in different registers through a main thread.
- different operating parameters may be stored in different registers, that is, one register is configured for each operating parameter.
- At least one read thread includes a read thread for the vibration sensor 1011 and a read thread for the temperature and humidity sensor 1011.
- a priority of the main thread is higher than that of the read thread for the vibration sensor 1011 and the read thread for the temperature and humidity sensor 1011.
- the priority of the read thread for the vibration sensor 1011 is higher than that of the read thread for the temperature and humidity sensor 1011.
- At least one read thread further includes a read thread for fault code, and a priority of the read thread for fault code is between that of the read thread for the vibration sensor 1011 and that of the read thread for the temperature and humidity sensor 1011. Additionally or alternatively, at least one read thread further includes a data read thread for the distance sensor 1011, and a priority of data read thread for the distance sensor 1011 is between that of the read thread for the vibration sensor 1011 and that of the read thread for the temperature and humidity sensor 1011.
- the plurality of read threads have different priorities.
- the priorities of the above five threads are arranged from high to low in the following order: the main thread, the read thread for the vibration sensor 1011, the read thread for fault code, the data read thread for the distance sensor 1011, and the read thread for the temperature and humidity sensor 1011.
- Fig. 4 schematically shows a flowchart of the thread interaction according to an embodiment of the present disclosure.
- the first preset operation further includes steps S224 and S225.
- step S224 a pointer, which points to a temporary storage address of the operating parameters read by the read thread, is sent by the read thread to the main thread through a mailbox.
- step S225 the operating parameters read by the read thread are obtained by the main thread according to the temporary storage address and are stored in a register.
- the pointer when information with a relatively large data volume is sent through the mailbox, the pointer, which points to an address of a memory or a data buffer (i.e., the temporary storage address) may be sent. In this way, the mailbox receiving the pointer may process contents at the address pointed by the pointer in the mail.
- the main thread receives mails from other read threads through the mailbox and obtains the operating parameters at the memory or data buffer based on the temporary storage address pointed by the pointer in the mail, and loads the operating parameters into a corresponding register.
- At least one of the information processing modules 1012 includes at least one first register and a plurality of second registers, and at least one of the operating parameters includes a temperature parameter, a humidity parameter, and a vibration parameter.
- the first register may include a special function register, and a plurality of exception types and a plurality of exception flag bits for respective exception types are configured in the first register.
- the second register may include a holding register, and at least one operating parameter and its value are configured in the second register.
- Fig. 5 schematically shows a flowchart for storing the operating parameters according to an embodiment of the present disclosure.
- the step S223 includes S2231 and S2232.
- step S2231 when at least one of the temperature parameter, the humidity parameter, and the vibration parameter is exceptional, the flag bit used to indicate the exception type in the first register is updated based on the existing exception. Otherwise, step S2232 may be executed directly.
- reference ranges may be pre-configured for respective operating parameters, and when the operating parameter exceeds its reference range, it may be determined as an exceptional operating parameter.
- preset parameters of W25Q128 may be read through an SPI interface, and these preset parameters include an equipment number of the escalator and preset threshold values used to determine whether the operating parameters are exceptional.
- a plurality of exception types including low-temperature operation, loose handrail, exceptional vibration, tight handrail, high-humidity operation, and high-temperature operation, may be configured in the first register.
- a preset temperature threshold value i.e., the temperature is too high
- the flag bit for high-temperature operation in the first register may be set into "1", otherwise, it may be set into "0".
- a preset temperature threshold value for the machine room may be set into 0 ⁇ 50°C, and a preset temperature threshold value for the outside may bet set into 0 ⁇ 65 °C.
- a preset humidity threshold value for the machine room may be set into 20 ⁇ 75% RH, and a preset humidity threshold value for the outside may bet set into 20 ⁇ 70% RH.
- a preset distance threshold value may be set into 8 ⁇ 15 cm.
- the vibration parameter may include escalator motor acceleration and reduction gearbox acceleration, a preset motor acceleration threshold may be set into -25-25 m/s 2 , and a preset reduction gearbox acceleration threshold may be set into -10 ⁇ 10 m/s 2 .
- the read temperature parameter, humidity parameter, and vibration parameter may be respectively stored in different second registers.
- the information processing modules 1012 include a plurality of second registers including a register for storing temperature parameter, a register for storing humidity parameter, a register for storing vibration parameter.
- the read temperature parameter, humidity parameter, and vibration parameter may be respectively stored in the plurality of second registers.
- a register storage content description, a data type, a coefficient, and an unit may also be configured for each second register.
- the information processing modules 1012 further include a register for storing module location, for example, the first information processing module 1012 located at the near end of the escalator and the second information processing module 1012 located in the escalator machine room.
- the plurality of information processing modules 1012 include a first information processing module 1012 and a second information processing module 1012.
- the first information processing module 1012 includes at least one first register and a plurality of second registers.
- the second information processing module 1012 is configured with a third register.
- At least one operating parameter further includes the escalator fault code and the distance parameter between the escalator handrail and the reference point.
- the second information processing module also includes at least one first register and a plurality of second registers.
- the plurality of second registers in the first information processing module may include a second register for storing distance parameter, while the second information processing module 1012 does not provide a second register for storing distance parameter, instead provides a third register for storing the escalator fault code.
- Fig. 6 schematically shows another flowchart of storing operating parameters according to an embodiment of the present disclosure.
- the first information processing module executes steps S2233 and S2234 in addition to step S2231, wherein, the step S2231 may be executed in combination with the step S2233, and the step S2232 may be executed in combination with the step S2234.
- step S2233 when the distance parameter is exceptional, the flag bit used to indicate the exception type in the first register is updated based on the exception.
- the flag bit in the first register representing the loose (or tight) handrail belt may be set into "1".
- step S2234 the read temperature parameter, humidity parameter, vibration parameter, and distance parameter are respectively stored into different second registers.
- a plurality of second registers include a register for storing a temperature parameter, a register for storing a humidity parameter, a register for storing a vibration parameter, and a register for storing a distance parameter, and the like.
- the read temperature parameter, humidity parameter, vibration parameter, and distance parameter may be stored into the aforementioned second registers, respectively.
- Fig. 7 schematically shows still another flowchart of storing operating parameters according to an embodiment of the present disclosure.
- the second information processing module further executes a step S2235 in addition to executing steps S2231 and S2232.
- step S2235 the flag bit used to indicate the type of fault in the third register is updated based on the escalator fault code.
- the third register is configured with a plurality of fault types and their corresponding flag bits.
- fault types are configured in the third register, including SPE (speed exception), CTRE (controller exception), MO (motor exception), and GE (gearbox exception).
- SPE speed exception
- CTRE controller exception
- MO motor exception
- GE gearbox exception
- the flag bit used to indicate the exception type in the first register includes at least one of a speed exception flag bit, a controller exception flag bit, a motor exception flag bit, a deceleration gearbox exception flag bit, and a handrail system exception flag bit.
- updating the flag bit used to indicate the exception type in the first register based on the existing exception includes: when the read operating parameter reaches a preset threshold, determining that the operating parameter is exceptional and setting the flag bit in the first register that matches the exception type into the first value.
- the escalator monitoring method further includes a step S410.
- step S410 when at least one of the operating parameters is determined to be invalid data, at least a sensor that collects the operating parameters is reset.
- a data exception flag bit may be configured in the first register of the information processing module.
- the monitoring module 1013 finds that the operating parameter is invalid data, it may modify the data exception flag bit in the first register into "1" through a write single register instruction, so as to realize a software reset for all sensors 1011.
- the data collected by the sensors 1011 at a high sampling frequency is transmitted and inevitably subject to interference, noise may be generated.
- digital filtering may be used to process the collected data.
- Digital filtering is a supplement to hardware filtering. Since there are many types of sensors 1011 in the escalator, with varying transmission distances and complicated installation environments, different digital filtering may be used for different sensors 1011 to avoid signal distortion caused by environmental interference during data transmission.
- the main body of the monitoring module 1013 is a Raspberry Pi 4B, which uses the Modbus-RTU protocol to poll the registers of the corresponding slave (such as the information processing module 1012 or the electronic energy meter 1014) for data acquisition. If the operating parameters are only acquired and forwarded, data processing will increase a lot of computational pressure. Therefore, in the embodiment of the present disclosure, the processing on the operating parameters by the monitoring module 1013 specifically includes: calculating the single exceptional duration and the accumulated exceptional duration of the operating parameters to obtain the escalator monitoring data.
- the monitoring module 1013 is set to automatically start up when the system boots up, for example, the Python program of the monitoring module 1013 automatically runs after the system starts up.
- the monitoring module 1013 needs to unpack the received data, that is, assign elements of a tuple to corresponding variables according to a preset order.
- Fig. 8 schematically shows a flowchart for generating exception time information according to an embodiment of the present disclosure.
- the step S230 includes steps S231 to S235.
- step S231 when at least one flag bit of the first register in at least one of the information processing modules 1012 includes a first value, at least one exception is determined, and whether there is an operating parameter stored in the second register exceeding a preset range is determined, otherwise this step is ended.
- step S232 when the operating parameter in the second register exceeds the preset range, it is determined that the operating parameters is exceptional, otherwise this step is ended.
- steps S233 to S235 are executed.
- step S233 a duration when the operating parameters exceed the preset range is calculated to obtain a single exception duration of the operating parameters.
- step S234 the single exception duration is accumulated to obtain an accumulated exception duration of the operating parameters.
- step S235 the exception time information of the operating parameters is determined in such a way that it includes the single exception duration and the accumulated exception duration of the operating parameters.
- an execution logic for calculating the single exception duration is substantially the same as that for the accumulated exception duration.
- a case of excessively high external ambient temperature will be taken as an example to explain the embodiment hereinafter.
- a time module in Python 3 may be called to complete time statistics.
- a start time and an end time when the temperature parameter exceeds the high temperature threshold may be recorded so as to calculate the single exception duration.
- the single exception duration After the single exception duration is calculated for the first time, it may be stored as the accumulated exception duration. Subsequently, each time the single exception duration is calculated, it may be added onto the accumulated exception duration that was stored for the previous-time calculation to obtain the latest accumulated exception duration.
- the plurality of operating parameters further include electrical parameters, which are read and stored by the electronic energy meter 1014.
- Fig. 9 schematically shows another flowchart of generating exception time information according to an embodiment of the present disclosure. As shown in Fig. 9 , the step S230 also includes steps S236 and S237.
- step S237 the electrical parameters from the electronic energy meter 1014 are obtained.
- the electrical parameters may include a main circuit voltage, a main circuit current, an active power, a power factor, a total energy consumption, and the like.
- step S2308 when the operating parameters in the second register exceed the preset range and the electrical parameters meet effective conditions, the step of calculating the duration when the operating parameters exceed the preset range is executed, otherwise this step is ended.
- the normal value range for main circuit voltage may be set into 361-399 V
- the normal value range for main circuit current may be set into 0-6 A
- the normal value for active power may be set into 0-4 KW
- the normal value range for reactive power may be set into 0-20 var
- the normal value range for power factor may be set into 0.75-0.95.
- the electrical parameters are stored in a register of electronic energy meter 1014.
- the resister further includes descriptions, data types, coefficients, and units.
- the step S240 includes step S241.
- step S241 the escalator fault code in the third register of the second information processing module 1012 is obtained, and the escalator monitoring data and the escalator fault code are packaged and forwarded through MQTT.
- the monitoring module 1013 determines to obtain the escalator fault code by judging that the flag bit of the fault type in the third register of the second information processing module 1012, and then judges whether the escalator has a specific fault.
- the server proxy used by MQTT is the cloud-deployed server of EMQX.
- EMQX After cloud deployment is completed, when a client initiates a connection, it needs to provide the deployment name, a connection address, and a port number. Access control needs to be set for each client, including client ID, subscription and publishing topics, and other contents.
- EMQX also provides an SQL rule engine, which may directly store the contents forwarded by MQTT to a specified database, with considering stability and other factors.
- the sampling speed of the information processing module 1012 is relatively high. Due to the limitation of transmission bandwidth, the monitoring module 1013 cannot directly forward the operating parameters from the information processing module 1012 through MQTT. Moreover, these operating parameters cannot intuitively reflect the operating status of the escalator. Therefore, in the embodiment of the present disclosure, the monitoring module 1013 processes these operating parameters, so as to ensure that the transmitted data can reflect the operating state of the escalator to the greatest extent on the basis of no strict time requirement.
- Fig. 10 schematically shows a flowchart of the escalator fault predicting method according to the embodiment of the present disclosure. As shown in Fig. 10 , The escalator fault predicting method according to the embodiment includes step S310 and step S320.
- step S310 the escalator monitoring data is consumed from a message forwarding server end, wherein the escalator monitoring data includes exception time information of at least one operating parameter that is determined by the escalator monitoring device 101.
- the escalator fault predicting device 102 parses the MQTT data packets of the subscribed topics and dumps it into the MySQL database.
- a database is created in MySQL, and the unpacked data will be dumped into the main table in the database.
- step S320 an escalator fault is predicted based on the exception time information of the operating parameters through a pre-trained support vector machine model.
- the support vector machine (i.e., SVM) is a binary classification model and a type of supervised learning algorithm in the field of artificial intelligence and machine learning. Its main function is to judge the possibility of the two possible results in an event, which is also known as processing binary classification problems. This type of problem is a widely existing form of problem in reality, and it is also one of the main forms of pattern recognition.
- the traditional implementation of support vector machine is to select a hyperplane to segment the sample data, and to require that the distance between the nearest sample points to the hyperplane after segmentation needs to be maximized. These points closest to the hyperplane are called support vectors, which in turn define the hyperplane. Support vector machine may be classified into three types according to their characteristics, including a hard margin support vector machine, a soft margin support vector machine, and a kernel method support vector machine.
- Fig. 11 schematically shows a schematic diagram of determining a hyperplane according to an embodiment of the present disclosure.
- the data points are represented by white and black dots in a two-dimensional plane.
- Many lines (the lines in the two-dimensional plane corresponding to the hyperplane in multi-dimensional space) in the drawing separate these points, but only separation planes represented by the dashed lines have the best generalization ability. From a distance perspective, it means to find a hyperplane that maximizes a distance from points on both sides of the hyperplane to the hyperplane, i.e., maximizes an interval between points and the hyperplane.
- the stronger the generalization ability of such a hyperplane the higher the confidence of the predicted samples through the model.
- the escalator fault predicting device 102 is designed to subscribe to the escalator monitoring data published by the escalator monitoring device 101 and find a matching type of escalator fault based on the exception time information (specifically, the single exception duration and the accumulated exception duration of the operating parameters mentioned in the above embodiments) of one or more operating parameters in the escalator monitoring data, so as to predict the escalator fault accordingly.
- exception time information specifically, the single exception duration and the accumulated exception duration of the operating parameters mentioned in the above embodiments
- the embodiments of the present disclosure can predict at least five types of fault according to the escalator monitoring data, which include an escalator running speed exception, a damage to the control unit, a motor exception, a damage to the reduction gear box, and a handrail belt exception.
- the escalator fault predicting method further includes a training step of the support vector machine model.
- Fig. 12 schematically shows a flowchart of training the support vector machine according to an embodiment of the present disclosure. As shown in Fig. 12 , the training step includes Step S410 to step S440.
- step S410 escalator monitoring data samples and escalator fault code samples forwarded by the escalator monitoring end are obtained.
- step S420 the support vector machine model to be trained is trained based on the obtained escalator monitoring data samples and escalator fault code samples.
- the sensors 1011 collect the operating parameters that are critical to the operation of the escalator, including the extent of tightness of the handrail belt, the ambient temperature and humidity of the escalator operation, the temperature and humidity of the escalator machine room, the vibration of the deceleration gearbox and motor, and the real-time power of the escalator main circuit, and the like.
- the monitoring module 1013 may poll information from all the slaves (the information processing modules 1012 and the electronic energy meter 1014).
- the monitoring module 1013 cannot directly upload the operating parameters that are collected in real time to the escalator fault predicting device 102, so that high-speed transmission of large data streams cannot be formed between monitoring module 1013 and the escalator fault predicting device 102, and the real-time operating parameters of the escalator cannot intuitively reflect the operating status of the escalator. Therefore, in the embodiment of the present disclosure, a concept of exception time information is introduced. When the real-time operating parameters of the escalator are transferred through the monitoring module 1013, the single exception duration and the accumulated exception duration of the currently-exceptional operating parameters, that are determined through the preset reasonable range of the operating parameters, are determined.
- the escalator fault predicting device 102 receives the messages published by the monitoring module 1013 and then store them into the database.
- the sample data including the exception time information of the received various types of exception and the corresponding escalator fault codes, are taken as the input data for training the SVM model.
- the exception time information of the operating parameters, that are currently exceptional, of the escalator is taken as an input for the SVM model so as to obtain a probability at which the predicted fault may occur.
- the problems of collecting, sorting, and analyzing the operating parameters of the escalator may be solved, and a data support for on-demand maintenance may be provided.
- the sensors 1011 are reasonably selected, and the information processing modules network with the monitoring module 1013, so as to process and transmit the operating parameters collected by the sensors 1011 to the monitoring module 1013.
- the networking between the information processing modules and the monitoring module 1013 and the data forwarding between the monitoring module 1013 and the escalator fault predicting device 102 through communication protocols such as Modbus and MQTT are realized, thereby ensuring a stable data transmission.
- the single exception duration and the accumulated exception duration of the operating parameters are combined with the SVM, and a fault prediction model is trained through the data with fault flags, thereby realizing the fault prediction.
- the faults such as the operating speed exception, the control unit exception, the motor exception, the deceleration gearbox exception and the handrail belt system exception may be predicted.
- the escalator fault predicting device includes an escalator monitoring device 101 and an escalator fault predicting device 102.
- the escalator monitoring device 101 includes a plurality of information processing modules 1012.
- the escalator fault predicting method includes steps S210 to S240 executed by the escalator monitoring device 101.
- step S210 a plurality of operating parameters of the escalator are collected.
- a first preset operation by at least one of the a plurality of information processing modules 1012 is executed to store the operating parameters that are currently collected, wherein there is at least one different operating parameter that is stored between any two ones of the information processing modules.
- the operating parameters stored in the plurality of information processing modules are polled to determine at least one exceptional operating parameter and its exception time information based on polling results so as to obtain escalator monitoring data.
- the escalator monitoring data is published to a message forwarding server end.
- the escalator fault predicting method further includes the following steps performed by the escalator fault predicting device 102.
- step S310 the escalator monitoring data is consumed from the message forwarding server end.
- step S320 the escalator fault is predicted based on the exception time information of the operating parameters through a pre-trained support vector machine model.
- the present disclosure also provides an escalator monitoring device.
- the device will be described in detail below with reference to Fig. 13 .
- Fig. 13 schematically shows a structural block diagram of an escalator monitoring device according to an embodiment of the present disclosure.
- the escalator monitoring device 101 includes a plurality of sensors 1011, a plurality of information processing modules 1012 and a monitoring module 1013.
- a plurality of sensors 1011 are used to collect a plurality of operating parameters of the escalator.
- the sensors 1011 may be used to execute the step 210 as described above, which will not be repeated here.
- the plurality of information processing modules 1012 are used to execute a first preset operation to store the currently collected operating parameters, wherein different information processing modules 1012 store at least one different operating parameter.
- the information processing module 1012 may be configured to execute the step S220 as described above, which will not be repeated here.
- the monitoring module 1013 is used to poll the operating parameters stored in the plurality of information processing modules 1012 and determine at least one exceptional operating parameter and its exception time information based on the polling results so as to obtain the escalator monitoring data; and to publish the escalator monitoring data to a message forwarding server end, wherein the escalator monitoring data is configured to enable the escalator fault predicting device to predict the escalator fault based on the escalator monitoring data through the support vector machine.
- the monitoring module 1013 may be configured to execute the steps S230 and S240 as described above, which will not be repeated here.
- any number of modules in the information processing modules 1012 and the monitoring module 1013 may be implemented in one module, or any one of the modules may be split into a plurality of modules. Alternatively, at least a part of functions of one or more of these modules may be combined with at least a part of functions of other modules and implemented in one module.
- At least one of the information processing modules 1012 and the monitoring module 1013 may be at least partially implemented as a hardware circuit, such as a field programmable gate array (FPGA), a programmable logic array (PLA), a system on a chip, a system on a substrate, a system on a package, an application-specific integrated circuit (ASIC), or implemented as a hardware or firmware formed by any other reasonable means, for example, integrating or packaging a circuit, or implemented as any one of software, hardware, and firmware or an appropriate combination thereof.
- FPGA field programmable gate array
- PLA programmable logic array
- ASIC application-specific integrated circuit
- at least one of the information processing modules 1012 and the monitoring module 1013 may be at least partially implemented as a computer program module, and when the computer program module is executed, corresponding functions may be performed.
- the present disclosure also provides an escalator fault predicting device.
- the device will be described in detail below with reference to Fig. 14 .
- Fig. 14 schematically shows a structural block diagram of an escalator fault predicting device according to an embodiment of the present disclosure.
- the escalator fault predicting device 102 includes a first obtaining module 1021 and a predicting module 1022.
- the first obtaining module 1021 is used to consume the escalator monitoring data from the message forwarding server end, wherein the escalator monitoring data includes the exception time information of at least one operating parameter determined by the escalator monitoring end.
- the first obtaining module 1021 may be configured to execute the step S310 as described above, which will not be repeated here.
- the predicting module 1022 is used to predict the escalator fault based on the exception time information of the operating parameters through a pre-trained support vector machine model. In an embodiment, the predicting module 1022 may be used to execute the step S320 as described above, which will not be repeated here.
- any number of modules in the first obtaining module 1021 and the predicting module 1022 may be implemented in one module, or any one of the modules may be split into a plurality of modules. Alternatively, at least a part of functions of one or more of these modules may be combined with at least a part of functions of other modules and implemented in one module.
- At least one of the first obtaining module 1021 and the predicting module 1022 may be at least partially implemented as a hardware circuit, such as a field programmable gate array (FPGA), a programmable logic array (PLA), a system on a chip, a system on a substrate, a system on a package, an application-specific integrated circuit (ASIC), or implemented as a hardware or firmware formed by any other reasonable means, for example, integrating or packaging a circuit, or implemented as any one of software, hardware, and firmware or an appropriate combination thereof.
- FPGA field programmable gate array
- PLA programmable logic array
- ASIC application-specific integrated circuit
- at least one of the first obtaining module 1021 and the predicting module 1022 may be at least partially implemented as a computer program module, and when the computer program module is executed, corresponding functions may be performed.
- the present disclosure also provides an escalator fault predicting device.
- the escalator fault predicting device 100 includes an escalator monitoring device 101 and an escalator fault predicting device 102.
- the escalator monitoring device 101 includes a plurality of sensors 1011, a plurality of information processing modules 1012, and a monitoring module 1013.
- the escalator fault predicting device 102 includes a first obtaining module 1021 and a predicting module 1022.
- the plurality of sensors 1011 are used to collect a plurality of operating parameters of the escalator.
- the plurality of information processing modules 1012 are used to execute a first preset operation to store the currently collected operating parameters, wherein different information processing modules 1012 store at least one different the operating parameters.
- the monitoring module 1013 is used to poll the operating parameters stored in the plurality of information processing modules 1012 and determine at least one exceptional operating parameter and its exception time information based on the polling results so as to obtain the escalator monitoring data.
- the forwarding module publishes the escalator monitoring data to a message forwarding server end.
- the first obtaining module is used to consume the escalator monitoring data from the message forwarding server end.
- the predicting module is used to predict the escalator fault based on the exception time information of the operating parameters through the pre-trained support vector machine model.
- Fig. 15 schematically shows a block diagram of an electronic device suitable for implementing an escalator monitoring method or an escalator fault predicting method according to embodiments of the present disclosure.
- an electronic device 200 includes a processor 201 that may perform various appropriate actions and processes according to programs stored in a read-only memory (ROM) 202 or programs loaded from a storage portion 208 into a random-access memory (RAM) 203.
- the processor 201 may include, for example, a general-purpose microprocessor (e.g., a CPU), an instruction set processor and/or a related chipset and/or a special-purpose microprocessor (e.g., an application-specific integrated circuit (ASIC)).
- the processor 201 may also include an on-board memory for caching purposes.
- the processor 201 may include a single processing unit or a plurality of processing units for performing different actions of the method according to embodiments of the present disclosure.
- the processor 201 In the RAM 203, various programs and data required for the operation of the electronic device 200 are stored.
- the processor 201, the ROM 202 and the RAM 203 are connected to each other through a bus 204.
- the processor 201 performs various operations of the method according to embodiments of the present disclosure by executing the programs in the ROM 202 and/or the RAM 203.
- the programs may also be stored in one or more memories other than the ROM 202 and the RAM 203.
- the processor 201 may also perform various operations of the method according to embodiments of the present disclosure by executing the programs stored in the one or more memories.
- the electronic device 200 may also include an input/output (I/O) interface 205, and the input/output (I/O) interface 205 is also connected to the bus 204.
- the electronic device 200 may also include one or more of the following components connected to the I/O interface 205: an input portion 206 including a keyboard, a mouse; an output portion 207 including a cathode ray tube (CRT), a liquid crystal display (LCD) and a speaker; a storage portion 208 including a hard disk; and a communication portion 209 including a network interface card such as a LAN card, a modem.
- the communication portion 209 performs communication processing via a network such as the Internet.
- a driver 210 is also connected to the I/O interface 205 as required.
- a removable medium 211 such as a magnetic disk, an optical disk, a magneto-optical disk, a semiconductor memory, etc., is mounted on the driver 210 as required so that a computer program read therefrom is installed into the storage portion 208 as required.
- the present disclosure further provides a computer-readable storage medium.
- the computer-readable storage medium may be included in the device/apparatus/system described in the above-mentioned embodiments, and may also exist alone without being assembled into the device/apparatus/system.
- the computer-readable storage medium described above carries one or more programs, and when the one or more programs are executed, the method according to embodiments of the present disclosure may be implemented.
- the computer-readable storage medium may be a computer nonvolatile computer-readable storage medium.
- the computer-readable storage medium may include but not limited to: a portable computer disk, a hard disk, a random-access memory (RAM), a read only memory (ROM), an erasable programmable read only memory (EPROM or flash memory), a portable compact disk read only memory (CD-ROM), an optical storage device, a magnetic storage device, or any suitable combination thereof.
- the computer-readable storage medium may be any tangible medium that contains or stores a program, wherein the program may be used by or in conjunction with an instruction execution system, apparatus, or device.
- the computer-readable storage medium may include the ROM 202 and/or the RAM 203 as described above, and/or one or more memories other than the ROM 202 and the RAM 203.
- embodiments of the present disclosure also provides a computer program product including a computer program carried on a computer-readable storage medium, and the computer program contains program codes for performing the method illustrated in the embodiments of the present disclosure.
- the computer program when executed by the processor 201, performs the functions described above defined in the system/device of embodiments of the present disclosure. According to embodiments of the present disclosure, the system, device, apparatus, module, unit as described above may be implemented by the computer program module.
- the computer program may rely on tangible storage medium such as optical storage devices and magnetic storage devices.
- the computer program can also be transmitted and distributed in the form of a signal on a network medium, downloaded and installed through the communication portion 209, and/or installed from the removable medium 211.
- the program codes contained in the computer program may be transmitted by any appropriate network medium, including but not limited to: wireless, wired, or any appropriate combination thereof.
- the computer program may be downloaded and installed from a network via communication portion 209 and/or installed from removable medium 211.
- the computer program when executed by the processor 201, performs the functions as described above defined in the system of embodiments of the present disclosure.
- the system, device, apparatus, module, unit as described above may be implemented by the computer program module.
- the program codes for executing the computer programs provided by the embodiments of the present disclosure may be written in any combination of one or more programming languages, specifically, high-level procedural and/or object-oriented programming language, and/or assembly/machine language to implement these computing programs.
- Programming languages include, but are not limited to, programming languages such as Java, C++, python, "C" or similar programming languages.
- the program codes may be executed entirely on the user's computing device, partly on the user's device, partly on the remote computing device, or entirely on the remote computing device or server.
- the remote computing device may be connected to the user's computing device through any kind of network, including a local area network (LAN) or a wide area network (WAN), or may be connected to an external computing device (for example, by using an Internet service provided by the Internet service provider).
- LAN local area network
- WAN wide area network
- each block in the flowcharts or block diagrams may represent a module, a program segment, or a portion of codes, which contains one or more executable instructions for implementing the specified logical function.
- the functions noted in the blocks may occur out of the order noted in the drawings. For example, two blocks shown in succession may, in fact, be executed substantially concurrently, or the two blocks may sometimes be executed in a reverse order, which depends upon the functions.
- each block of the block diagrams or flowcharts, and combinations of the blocks in the block diagrams or flowcharts may be implemented by using a special purpose hardware-based system that performs the specified functions or operations, or may be implemented using a combination of a special purpose hardware and computer instructions.
Landscapes
- Testing And Monitoring For Control Systems (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23191817.8A EP4509451A1 (de) | 2023-08-17 | 2023-08-17 | Überwachungsverfahren und -vorrichtung für eine personentransportanlage |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23191817.8A EP4509451A1 (de) | 2023-08-17 | 2023-08-17 | Überwachungsverfahren und -vorrichtung für eine personentransportanlage |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4509451A1 true EP4509451A1 (de) | 2025-02-19 |
Family
ID=87695923
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23191817.8A Withdrawn EP4509451A1 (de) | 2023-08-17 | 2023-08-17 | Überwachungsverfahren und -vorrichtung für eine personentransportanlage |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4509451A1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120308776A (zh) * | 2025-06-12 | 2025-07-15 | 浙江西子富沃德电机有限公司 | 一种智能控制系统及曳引机系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110929934A (zh) * | 2019-11-22 | 2020-03-27 | 深圳市通用互联科技有限责任公司 | 设备故障预测方法、装置、计算机设备和存储介质 |
| CN110937489A (zh) * | 2019-11-15 | 2020-03-31 | 广东寰球智能科技有限公司 | 自动扶梯的在线故障监控预警方法及系统 |
| KR102230118B1 (ko) * | 2019-05-27 | 2021-03-19 | 투비씨앤씨 주식회사 | 고객 안전을 위한 IoT 기반의 엘리베이터 모니터링 시스템 및 모니터링 방법 |
-
2023
- 2023-08-17 EP EP23191817.8A patent/EP4509451A1/de not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102230118B1 (ko) * | 2019-05-27 | 2021-03-19 | 투비씨앤씨 주식회사 | 고객 안전을 위한 IoT 기반의 엘리베이터 모니터링 시스템 및 모니터링 방법 |
| CN110937489A (zh) * | 2019-11-15 | 2020-03-31 | 广东寰球智能科技有限公司 | 自动扶梯的在线故障监控预警方法及系统 |
| CN110929934A (zh) * | 2019-11-22 | 2020-03-27 | 深圳市通用互联科技有限责任公司 | 设备故障预测方法、装置、计算机设备和存储介质 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120308776A (zh) * | 2025-06-12 | 2025-07-15 | 浙江西子富沃德电机有限公司 | 一种智能控制系统及曳引机系统 |
| CN120308776B (zh) * | 2025-06-12 | 2025-11-28 | 浙江西子富沃德电机有限公司 | 一种智能控制系统及曳引机系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111818136B (zh) | 数据处理方法、装置、电子设备及计算机可读介质 | |
| EP3944058B1 (de) | Verfahren und vorrichtung zur erzeugung dynamischer latenzmeldungen in einem rechnersystem | |
| CN108985461B (zh) | 一种自主机器学习的方法、装置和终端设备 | |
| CN116489152B (zh) | 物联设备联动控制方法、装置、电子设备和介质 | |
| Zhao et al. | An edge streaming data processing framework for autonomous driving | |
| EP4509451A1 (de) | Überwachungsverfahren und -vorrichtung für eine personentransportanlage | |
| CN107797465A (zh) | 监控方法和装置 | |
| CN118092353B (zh) | 一种基于在线视频的工业物联网巡检系统及方法 | |
| CN116468970A (zh) | 模型训练方法、图像处理方法、装置、设备及介质 | |
| CN116107624A (zh) | 车辆数据处理方法、装置、设备及介质 | |
| CN118283062A (zh) | 服务订阅方法、装置、车辆及存储介质 | |
| CN111885165A (zh) | 设备数据采集传输及反向控制方法及装置 | |
| Young et al. | An architecture for intelligent data processing on iot edge devices | |
| CN114328915A (zh) | 语料标签获取方法、装置及计算机设备 | |
| CN115277421B (zh) | 配置信息推送方法、装置、电子设备和计算机可读介质 | |
| CN116647511A (zh) | 一种数据传输流量预测方法及装置 | |
| CN113111692A (zh) | 目标检测方法、装置、计算机可读存储介质及电子设备 | |
| CN112988417B (zh) | 消息处理方法、装置、电子设备及计算机可读介质 | |
| CN120583085A (zh) | 基于云边协同的提升多机器算法推理效率的方法 | |
| CN116902041B (zh) | 接口数据处理方法、装置、电子设备及介质 | |
| EP4528669A1 (de) | Verfahren und vorrichtung zur verarbeitung von bilddaten sowie vorrichtung und speichermedium | |
| CN119490122A (zh) | 扶梯监控方法及装置、扶梯故障预测方法、装置及设备 | |
| CN116894183A (zh) | 智能体控制模型训练方法、装置、计算机设备及存储介质 | |
| Bielefeld | Online performance anomaly detection for large-scale software systems | |
| CN115348320A (zh) | 一种通信数据的转换方法、装置、及电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20250820 |