EP4530145A1 - Automatisierbares system zum transport von transportkabinen; logistiksystem und verfahren zum handhaben mehrerer kabinen - Google Patents
Automatisierbares system zum transport von transportkabinen; logistiksystem und verfahren zum handhaben mehrerer kabinen Download PDFInfo
- Publication number
- EP4530145A1 EP4530145A1 EP23200943.1A EP23200943A EP4530145A1 EP 4530145 A1 EP4530145 A1 EP 4530145A1 EP 23200943 A EP23200943 A EP 23200943A EP 4530145 A1 EP4530145 A1 EP 4530145A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- transport
- cabins
- spatial direction
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61B—RAILWAY SYSTEMS; EQUIPMENT THEREFOR NOT OTHERWISE PROVIDED FOR
- B61B3/00—Elevated railway systems with suspended vehicles
- B61B3/02—Elevated railway systems with suspended vehicles with self-propelled vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61B—RAILWAY SYSTEMS; EQUIPMENT THEREFOR NOT OTHERWISE PROVIDED FOR
- B61B13/00—Other railway systems
Definitions
- the present invention relates to an overland cabin transport system, method for transporting transport cabins, transport cabin transfer unit and method for transferring transport cabins between the overland transport cabin transport system.
- the present invention relates to guiding arrangements exhibiting at least one crawler type vehicle. Further, the present invention refers to a method of building a guiding structure. In particular, the present invention refers to devices and methods according to features of the enclosed independent and dependent claims.
- the international patent application WO2019099984A1 describes a SYSTEM AND METHOD FOR SWITCHING RAILCARS USING A STATIC RAIL-TRACK CONFIGURATION with an onboard track switching mechanism for a railroad vehicle to switch from one track to another.
- a switch for enabling a railroad vehicle to switch tracks is disclosed.
- the system comprises a running track that supports an automotive a switching track comprising a set of static components and a switching mechanism installed- on the automotive, the switching mechanism configured for controlling the movement of one or more switching wheels such that when activated, the switching mechanism is configured to facilitate engagement of the: one or more switching wheels with the switching track for carrying out a track changing operation for the automotive.
- the European patent application EP3705409 A1 describes an androgynous coupling means with great ease of use, high security and high fidelity. Furthermore, this androgynous coupling means may also comprise any efforts or measures for providing androgynous couplings such that the coupling procedure can be carried out with great reliability irrespective of any preload or position tolerance.
- this androgynous coupling means may be provided in the configuration of a connector and is configured for connecting energy lines or flow lines and/or for connecting information lines or flows and/or for connecting fluid lines or flows like gas flow, especially for thermally and/or electrically connecting these lines or flows.
- the European patent EP3803727B1 describes a method for providing process protocols for a number of physical objects (O) passing through a plurality of production/processing stations (P1... Pn) in a production/processing line, wherein machine-readable data (D) are assigned to at least one object (O), wherein the data comprise at least one identifier by means of which the relevant object can be uniquely identified, wherein the process protocol is continuously generated by continuous addition.
- the present invention proposes a new type of transport system comprising a new type of vehicle coupled to a structure.
- the present application is part of an overarching concept whose goal is to perform processing operations of cabins as automated as possible and preferably also autonomously and with the smallest possible ecological footprint.
- the invention especially proposes an automatable system for the transport of transport cabins, characterized in that a guiding arrangement for transporting the cabins is arranged, wherein the guiding arrangement comprises at least one vehicle and a structure extending in at least two spatial directions, wherein the structure comprises a plurality of profile units extending in a first spatial direction, wherein the structure defines in at least a part of its surface at least one structural regularity in a second spatial direction; and wherein the at least one vehicle comprises a plurality of connection elements configured for guiding the at least one vehicle, wherein the at least one vehicle comprises a connection element, wherein the connection element is configured to connect to at least one cabin; and wherein the guiding arrangement is configured for active motion of the vehicle in said first spatial direction and/or said second spatial direction.
- the transport cabins described in the current application text can be implemented for a transport of persons and/or items. Cabins which can preferably be implemented for the transport of items are described as containers in the current application text. However, in some embodiments the containers can be adapted for the transport of people.
- containers may be understood as a container, such as a shipping container and an exchangeable container.
- a container such as a shipping container and an exchangeable container.
- it is a robust container designed to endure the rigor of transportation, storage and handling.
- These containers encompass a wide variety, ranging from durable steel containers commonly employed in intermodal shipping to specialized units tailored for the secure transport of sensitive and high-value cargo, including hazardous materials, electronics, pharmaceuticals, and even temperature-sensitive goods like fresh produce.
- specialized units include refrigerated containers, so-called reefers, tank containers for the transport of liquids, gases and powders.
- Car transport containers often feature integrated loading ramps, wheel chocks, and tie-down points to secure cars during transit, minimizing movement and potential damage.
- the interior is often customized to protect the car's finish, with features like padded walls and floors.
- Car transport containers are especially R-Rack or RORO (Roll On Roll Off) containers.
- R-Rack is a collapsible and stackable container
- RORO refers to ships designed to carry wheeled cargo that are driven on and off the ship on their own wheels or using a platform vehicle.
- container can be understood as an intermodal freight container. This type of container is purposefully engineered for seamless transition between different modes of transport without the need for unloading and reloading of the container itself.
- intermodal freight containers serve as reusable transport and storage units, facilitating the movement of goods and raw materials between various locations or countries.
- the present disclosure particularly refers to containers, which (partly) comply with ISO standards and are, therefore, called ISO containers.
- Shipping containers can go through a transportation chain over land and water with or without the transfer of individual units in ports or train stations. These containers have preferably sturdy frame, solid walls, and waterproof doors, allowing them to be stacked in more than five layers and tightly packed in stacks of more than 20 containers side by side. These stacks are usually secured for sea transport using lashings. Shipping containers are commonly configured such that six, often nine or more, fully loaded containers can be stacked on top of each other. For the sea transport, the ship's movements, i.e. the lateral and longitudinal acceleration must be considered. Additional factors such as wind and wave impact must be considered depending on whether the cargo is stored in the hold or on deck of the container ship.
- the containers on deck are secured with so-called twist locks and lashing rods / tensioners, while in the hold, the containers are typically secured with cell guides.
- Spacer pieces, the so-called twist stackers, can be used between containers to prevent them from shifting.
- these containers are usually equipped with (standardized) corner castings, which enable a connection between containers and hoisting gear via twistlocks.
- a fastener which is inserted into a corner casting of a container.
- a part of the twistlock is rotated by 90°, creating a form-fit connection.
- each of its eight corners has a corner casting for hoisting, stacking and securing, whereas a vessel of a tank container is arranged in the middle of a steel frame, which itself is equipped with corner castings.
- corner castings arrangements and corner castings shapes for hooks, shackles and other connecting means are possible.
- alternative container securing mechanisms are possible such as androgynous coupling via actuating a motor and gearing mechanism or connecting via pad eyes or lifting lugs.
- the invention especially proposes an automatable system for the transport of transport cabins, characterized in that a guiding arrangement for transporting the cabins is arranged, wherein the guiding arrangement comprises at least one vehicle and a structure extending in at least two spatial directions, wherein the structure comprises a plurality of profile units extending in a first spatial direction, wherein the structure defines in at least a part of its surface at least one structural regularity in a second spatial direction; and wherein the at least one vehicle comprises a plurality of connection elements configured for guiding the at least one vehicle, wherein the at least one vehicle comprises at least one vehicle, wherein the at least one vehicle comprises a connection element, wherein the connection element is configured to connect to at least one cabin; and wherein the guiding arrangement is configured for active motion of the vehicle in said first spatial direction and/or said second spatial direction.
- a crawler type vehicle can exhibit at least one motor/actuator for actively driving the crawler type vehicle along the structure.
- the crawler type vehicle follows an intended direction resp. an intended path of motion, especially in conjunction with appropriate sensor-actor-arrangements.
- the guiding arrangement is configured for active motion of the vehicle / the vehicles includes all embodiments wherein the vehicle/s can move on its/their own.
- actively moving designates a motion of the vehicle in relation to the structure actuated preferably by an electric motor of the vehicle connected to a drive unit such that the vehicle can move on its own inside the structure when the motor is activated.
- the choice of an appropriate motor can be carried out by the person skilled in the art in regard to existing motors and motor arrangements depending on the respective application / task / size of the respective vehicle, e.g., crawler type vehicle.
- Connection elements are implemented to enable coupling the cabin to the vehicle and/or decoupling the cabin from the vehicle.
- Examples of especially preferred connection elements are the coupling means described in the European patent application EP3705409 A1 , especially because of their great ease of use, high security and high fidelity.
- connection elements may be provided in the configuration of a connector and is configured for connecting energy lines or flow lines and/or for connecting information lines or flows and/or for connecting fluid lines or flows like gas flow, especially for thermally and/or electrically connecting these lines or flows as it is for example described in the European patent application EP3705409 A1 .
- connection element When selecting a connection element, it's important to consider factors like the cabin's weight, fragility, shape, and material type. Proper selection and implementation can greatly enhance operational efficiency and safety.
- the current application text describes certain options for handling the cabins after their transport with the automatable system for the transport of transport cabins including by at least one logistic process of a further transport system.
- object identification features as sensors for QR code reading or sensors for RFID tag reading.
- the Automatable system for the transport of transport cabins is designed with regard of the physical properties of the cabins to be transported and adapted to available space.
- the present invention provides for integrating a guiding arrangement exhibiting at least one vehicle and a structure extending in at least two spatial directions, wherein the structure comprises a plurality of profile units (especially rails) extending (preferably continuously, especially without any structural discontinuity) in a first spatial direction, wherein the structure defines at least one structural regularity in a second spatial direction (thereby providing a one-dimensional raster with discrete coupling points distributed in at least one equidistant regularity in said second spatial direction).
- the vehicle is especially a crawler type vehicle that exhibits a plurality of connection elements configured for guiding the vehicle and configured for coupling the crawler type vehicle to the structure by means of de-/coupling kinematics depending on a relative motion of the vehicle with respect to the structure in at least said second spatial direction, wherein the (crawler type) vehicle comprises means for providing for de-/coupling kinematics during a motion of the crawler type vehicle in said second spatial direction, especially with the crawler type vehicle being configured to be moved in said first spatial direction along the profile units irrespective of momentary motion in said second spatial direction.
- All vehicles according to the present description can be designed as any of the crawler type vehicles described in this patent application text.
- structure when it is referred to "structure", a structure that predominantly extends along a Vertical plane or horizontal plane or even along an inclined plane (or the like) is designated.
- the present invention is applied for vehicles being arranged at resp. traveling along a structure, and in addition, the present invention also allows for any motion along any structure with alternative orientation and/or arrangement.
- referring to a “structure” includes reference to any other “structure” exhibiting the features presently described allowing for coupling with/to the inventive vehicle and corresponding de-/coupling kinematics.
- profile units or “profiles” or “T-profiles”
- T-profiles the disclosure also generally refers to different kinds of profiles like e.g. I-profiles or L-profiles which may provide for advantageous/favorable arrangements in individual applications.
- each connection element exhibits at least one element of motion (for gliding or rolling, especially at least one wheel) arranged and configured for actively moving (especially gliding or rolling) the vehicle in said first spatial direction.
- each connection element exhibits at least two elements of motion, e.g., a main wheel and a side wheel (side friction wheel of a roller coaster) clamping the profile unit from at least two sides.
- vehicle when it is referred to "vehicle”, the disclosure generally refers to vehicles, capable of moving along the suspension structure.
- vehicles or vehicles connectable to the relative spatial arrangement or traveling motion are preferred.
- the vehicle exhibits one or more load attachment points configured for connecting to connection element to interact with one or more cabin.
- the vehicle can exhibit at least one motor/actuator for actively driving the vehicle along the structure.
- the vehicle follows an intended direction resp. an intended path of motion, especially in conjunction with appropriate sensor-actor-arrangements.
- the suspension structure can exhibit at least one energy charging point/position/area, wherein the suspension structure is configured for charging/providing the at least one vehicle with energy when being arranged in/at said energy charging point/position/area.
- the charging area covers at least one charging section or the whole structure.
- a guiding arrangement that comprises at least one vehicle and a structure extending in at least two spatial directions, wherein the structure comprises a plurality of profile units extending in a first spatial direction, wherein the structure defines in at least a part of its surface at least one structural regularity in a second spatial direction; and wherein the at structure comprises a plurality of connection elements configured for guiding the at least vehicle, wherein the at least one vehicle comprises at least one vehicle, wherein the at least one vehicle comprises a connection element, wherein the connection element is configured to connect to at least one cabin; and wherein the guiding arrangement is configured for active motion of the vehicle in said first spatial direction and/or said second spatial direction for transporting the cabins parallel to at least one transfer area for the cabins in an appropriate distance from the adjacent side of transported cabins the cabins can be flexibly transported and transported.
- the at least one vehicle is a crawler type vehicle
- the crawler type vehicle comprises means for providing for de-/coupling kinematics during a motion of the crawler type vehicle in said second spatial direction, especially with the crawler type vehicle being configured to be moved in said first spatial direction along the profile units irrespective of momentary motion in said second spatial direction enables independent movements of the vehicles with high acceleration, high speed and high deceleration.
- the vehicle or plurality of vehicles exhibit/s at least two circumferential tracks, wherein the connection elements are attached to the circumferential tracks at predefined longitudinal positions corresponding to the structural regularity, wherein the circumferential tracks respectively define a specific path of circumferential motion of the respective connection elements, thereby providing for de-/coupling kinematics during a motion of the vehicle in said second spatial direction (y).
- circumferential track when it is referred to "circumferential track”, the disclosure also generally refers to closed loop guidings and lines and predefined contours along which the connection elements are guided and/or driven, e.g., chains or any such traction means providing for a closed loop.
- each track exhibits at least three different guide/rail sections, namely: a first (linear) section in which each connection element is engaged with the profile, wherein the connection element performs a linear motion; and at least one second (curved) section in which each connection element performs a de-/coupling motion (wherein each track may exhibit two second sections being arranged oppositely); and a third (linear) section in which the connection elements are returned to couple again with the profile (for continuous, circumferential motion and engagement process).
- first and second tracks may define the trajectory of the respective free ends of the connection elements especially exhibiting at least one element of motion, e.g., a wheel, being attached to the respective connection element by any appropriate means (e.g. by a gliding/rolling contour, a chain drive, a timing belt, or any likewise mechanism or mechanical feature) which is configured for predefining a specific contour and for guiding the free ends resp. the rollers to follow that contour of the tracks.
- any appropriate means e.g. by a gliding/rolling contour, a chain drive, a timing belt, or any likewise mechanism or mechanical feature
- the circumferential tracks respectively define a specific path of circumferential motion of the respective connection elements (resp. of coupling means of the connection elements, especially of a free end of the respective connection element).
- Such configuration not only facilitates implementation in context with complex structures or in context with a plurality of vehicles to be used at the same time, but also considerably increases variability as to positioning. Thereby, the present invention also provides for practical scalability (both with respect to the structure and with respect to the number of vehicles), even in three-dimensional extension, if desired.
- the vehicle can exhibit two or more kinds/types of connection elements, wherein the different types of connection elements are de-/coupled according to individual kinematics (especially in opposite directions/sides at the profile units, especially both in and opposite to the second spatial direction resp. travel direction of the vehicle), wherein a first subset of the connection elements are attached to a first pair of circumferential tracks (resp. a subset of the first subset, momentary) and at least one further subset of the connection elements are attached to a second pair of circumferential tracks (resp. a subset of the second subset, momentary) respectively at predefined first and second (further) longitudinal positions respectively corresponding to the structural regularity (resp.
- first and second pairs of circumferential tracks provide for individual kinematics for the first and second subsets of connection elements, especially such that the vehicle can be secured with respect to opposite sides/directions (of the second spatial direction) at the structure resp. at the profile units.
- the vehicle can be configured for enabling at least one closed loop trajectory of respective connection elements along corresponding circumferential tracks, especially configured for enabling at least two closed loop trajectories of at least two subsets of respective connection elements.
- the circumferential tracks can be shaped in such a manner that the respective connection elements are de-/coupled from/into the structure when passing a curved section of the tracks.
- a subset of the connection elements can be attached to one of the circumferential tracks (resp. a subset of the first subset, momentary) and at least one further subset of the connection elements are attached to a further one of the circumferential tracks (resp. a subset of the second subset, momentary) respectively at predefined first and second (further) longitudinal positions respectively corresponding to the structural regularity, in particular with each connection element being guided by a pair of circumferential tracks.
- connection elements can be fixedly attached/coupled by means of a first pulley to/with a/the first circumferential track and are guided within a/the second circumferential track by means of a second pulley respectively, wherein the first and second pulley preferably are arranged at a lever arm of the respective connection element.
- each connection element can exhibit a first pulley and a second pulley arranged in longitudinal distance with respect to the first pulley at a lever arm of the respective connection element, wherein the connection element is coupled to a/the first and a/the second circumferential tracks via the first and second pulleys.
- each connection element exhibits at least one wheel to roll on a tread of the profile unit a further wheel to roll on a side of the tread of the profile unit to reduce potential slip.
- connection elements can be connected to each other by means of longitudinal connecting elements, especially by chain elements, thereby forming a closed loop of interrelated connection elements distanced to each other in a/the predefined structural regularity.
- the respective circumferential track e.g., exhibits a chain or is provided/defined by a chain forming a closed loop of interrelated chain elements.
- the vehicle especially if designed as crawler type vehicle can be configured for lifting a/the respective connection elements out of the structure in an unloaded state, especially such that both de-/coupling kinematics for a subset of momentarily unloaded connection elements and suspension of the vehicle by a subset of momentarily loaded connection elements can be ensured.
- connection element can be guided by a pair of circumferential tracks, wherein the vehicle exhibits at least three pairs of circumferential tracks each guiding a subset of the connection elements, wherein said de-/coupling kinematics are predefined by said three pairs of circumferential tracks in such a manner that respective connection elements (resp. a subset of the respective subset, momentary) simultaneously de-/couple both at a first side (resp. first longitudinal position) of a respective profile unit and at a second side (resp.
- the vehicle exhibits at least one drive interacting with (resp. driving) at least one of the circumferential tracks, wherein the suspension system is configured for a predefinable driven motion of the vehicle at least in said second spatial direction (especially back and forth).
- the vehicle can also exhibit an energy storage unit providing energy to a/the at least one drive, preferably all drives, of the vehicle, especially to a/the at least one drive interacting with (resp. driving) at least one of the circumferential tracks.
- the term "drive unit” especially refers to a unit accommodating kinematics allowing for traveling motion of the vehicle, as described above.
- the shape or dimension of the at least one first drive unit can be defined individually according to specific applications.
- the cross-section geometry of the at least one first drive unit is in the shape of a racecourse (parallel longitudinal sections and opposite semicircle sections). But alternatively, the cross-section geometry can also be circular or elliptical for example.
- the structure exhibits power rails integrated into the profile units and the vehicle, or the plurality of vehicles exhibits means for electrically connecting to the power rails.
- connection elements each comprise at least two electrically connected electrical contacts configured for establishing an electrical connection between the structure and the vehicle, wherein the first electrical contact of a first connection element for establishing an electrical connection is electrically connected to a first pole/phase of a power bus in the structure when the vehicle is coupled to the structure via the first connection element and the first electrical contact of a second connection element for establishing an electrical connection is electrically connected to a second pole/phase of the power bus in the structure when the vehicle is coupled to the structure via the second connection element, and wherein the second electrical contacts of the connection elements are each connected to a respective pole/phase of an internal bus of the vehicle at least when the vehicle is coupled to the structure via the connection elements for establishing an electrical connection.
- electrical contact designates a connection mechanism that enables the flow of electrical current between two or more conductive elements.
- the primary objective of an electrical contact is to establish a reliable and efficient means of transferring electrical signals or power.
- the electrical contacts must possess certain key properties, such as high electrical conductivity, mechanical robustness, corrosion resistance, and thermal stability.
- suitable materials for electrical contacts may include copper, copper alloys, or noble metals like gold, silver, or platinum, as well as various alloys and composite materials. It is imperative that the connection between the electrical contact and the pole/phase in the structure be established in a reversible manner, allowing for repeated engagement and disengagement without compromising its performance.
- reversible electrical contact mechanisms include sliding contacts, where two surfaces slide against each other to establish and break the connection, or roller contacts, where rotating elements facilitate electrical contact.
- the power rails can be integrated into the profiles of the structure, i.e., along the I-, L-, or T-profiles on one edge or side, preferably above the tread surface of the profile.
- the vehicle can e.g., comprise electronics connected to the internal bus for supplying the vehicle with power.
- These electronics can comprise but are not limited to communication modules for wireless or wired data exchange (vehicle-to-vehicle, vehicle-to-infrastructure, vehicle-to-mobile devices, etc.), a/the central control unit, sensors (proximity sensors, accelerometers, LiDAR, radar, etc.), a power management system (power converters (AC/DC, DC/DC), battery management, voltage regulators, ESD protection), motors, etc.
- the vehicle can also comprise an energy storage, such as a battery pack and/or super capacitors and/or the vehicle can comprise electrical connection means for connecting to the connection element, wherein the connection element can be supplied with power via the electrical connection means.
- the second sliders can be connected to the conducting rail such that the first slider has a defined potential before the first sliders are in proximity or connected to the power rail in the structure and when the connection elements are decoupled from the structure, the first sliders are disconnected from the power rail before the second sliders are disconnected from the conducting rail.
- This measure serves to avoid spark creation, especially in the moment the connection elements are brought into contact with the structure, by pulling the floating potential of the electrical contact to the potential of the power rail before.
- connection elements when the connection elements are coupled to the structure, the first sliders are connected to the power rail in the structure before the second sliders are in proximity or connected to the conducting rail in the vehicle and when the connection elements are decoupled from the structure, the second sliders are disconnected from the conducting rails before the first sliders are disconnected from the conducting rail.
- This can reduce wear on the electric rails in the structure and shifts potential wear into the vehicle sliding contacts which are considered to be simpler to retransport by maintenance actions.
- At least two conducting rails are placed in parallel at least to sections of the described circumferential tracks (see above), wherein at least two connection elements for establishing an electrical connection comprise means for dis-/connecting from/to the conducting rails, when the connection elements are de-/coupled from/into the structure.
- the conducting rails can be integrated into the vehicle particularly easily, when the first drive unit has a race-course shape, wherein the connection elements that are currently coupled into the structure are following a straight or linear section.
- Arranging two conducting rails in parallel can mean to place them on opposite sides at the same height of the drive unit, on one side at different heights with respect to the plane in which the structure is extending, or on opposite sides at different heights.
- first drive unit If only one first drive unit is used, it has proven beneficial to place the conducting rails on opposite sides. However, for scalability and easier integration process of more drive units, it can be beneficial to arrange two conducting rails at different heights on one side, because another drive unit, also exhibiting conducting rails in the same fashion could be integrated into the first drive unit in a mirror-inverted manner.
- connection elements configured for establishing an electrical connection with the structure can exemplarily be distributed along the at least one first drive unit such that, when the vehicle is moving along the structure, a connection element for the electrical connection of a respective pole/phase is coupled into the structure before an otherwise last/only connection element connected to the respective pole/phase is decoupled from the structure.
- Every connection element is configured for establishing an electrical connection with the structure. This can be beneficial for applications where a particularly high amount of power is to be transferred via the connection elements because the current can be distributed over many connection elements, reducing heat creation and wear of the components. Additionally, with this redundant configuration, a disconnect of single connection elements would not result in a complete disconnection of the full vehicle.
- the whole structure exhibits poles/phases of the power bus.
- the vehicle and structure have to be coordinated such that there is always one connection element of a corresponding pole/phase connecting to the bus in the structure by coupling the connection element into the structure before the otherwise last connection element that is currently connected to the same pole/phase in the structure gets disconnected from the bus from a decoupling process of the connection element.
- the Automatable system for the transport of transport cabins, the vehicle, or the plurality of vehicles exhibit/s at least two independently controllable motors, wherein at least one motor is configured for driving a motion in the first spatial direction (x) and at least one further motor is configured for driving a motion in the second spatial direction (y).
- Each power unit, drive, motor and/or actuator of the vehicle can be coupled to a control unit of the vehicle.
- the vehicle may exhibit two or three drive units which can be arranged in predefined lateral distance to each other (e.g. defined/connected via cross-beams or the like), and each drive unit may exhibit at least one drive/motor for actively driving the connection elements along the circumferential tracks or the vehicle in the second spatial direction, and these drives/motors can be controlled depending on each other, e.g. via the speed of rotation.
- a traveling direction can be controlled in combination with actively driven wheels of the connection elements being driven along the profile rails of the structure.
- the connection elements can e.g., be connected via a spur gear to a motor.
- the wheels of the connection elements can also or alternatively exhibit gear grooves to interact with a corresponding contour integrated into a "bottom" side of the profile unit, wherein "bottom” indicates the side of the profile unit facing the vehicle.
- the vehicle can alternatively or in addition exhibit at least one second kind of a drive unit configured for enabling locomotion of the vehicle in the first spatial direction.
- the first drive units of the vehicle can be scaled up in number, e.g., the vehicle exhibits three first drive units each being based on the same kinematic concept, but at least one of these drive units providing for mirror-inverted type/manner of de-/coupling kinematics.
- the second kind of drive unit can, e.g., comprise a holonomic wheel, or an elongated gearing wheel, that is able to be moved in the second spatial direction while moving the vehicle in the first spatial direction when driven.
- a holonomic wheel is a wheel whose wheel tread consists of rollers whose axes of rotation are at an angle to the axis of rotation of the main wheel.
- the absolute angle between the axes can for example be any angle between 5 and 90 degrees, especially 45 degrees. This angle has to be regarded when controlling the at least two motors, since the movement of the first drive units and the second drive unit are not independent in the case that the angle of the rollers to the wheel is different than 90 degrees.
- An angle smaller than 90 degrees can result in advantageous configurations regarding the traction of the holonomic wheel with the profiles of the structure.
- the holonomic wheel can e.g., be disc shaped and comprise a plurality of equally distributed rollers around its circumference, such that it allows for traction control in the first spatial direction and is not affected by a motion in the second spatial direction.
- the vehicle, or the plurality of vehicles comprise/s a holonomic wheelset exhibiting gear grooves for form fit coupling, especially with a bottom side of the profile units.
- the bottom side of the profile units needs to exhibit corresponding teeth to form fit with the gear grooves of the holonomic wheelset.
- the gear grooves are distributed equidistantly along the circumference of each holonomic wheel of the wheelset.
- the holonomic wheel set comprises at least two coaxially arranged holonomic wheels.
- the coaxially arranged holonomic wheels are e.g., disc shaped and have a thickness that is half the width of the profiles of the structure, such that there is room for at least two holonomic wheels of the holonomic wheelset to interact with one profile (rail) of the structure at all times.
- Each of the coaxially arranged holonomic wheels can have a predefined offset in the azimuthal direction in respect to their adjacent holonomic wheels.
- one holonomic wheel comprises n rollers, that are equally distributed around the circumference of the wheel, each wheel is offset by 180/n degrees with respect to its neighbors. This way, it can be ensured that there is always at least one wheel of the wheelset in contact with the profile of the structure such that slip is prevented.
- the vehicle or plurality of vehicles exhibit/s a return mechanism.
- a holonomic wheelset is connected to a return mechanism that applies a force to the holonomic wheel(s) pressing it/them against the structure.
- This configuration enhances traction of the holonomic wheel on the profiles (rails) of the structure additionally ensures form fit in the case that the holonomic wheels exhibit gear grooves and the structure exhibits corresponding teeth.
- the vehicle or the plurality of vehicles exhibits counter wheels.
- the counter wheels can also be connected to the return mechanism.
- the counter wheels are connected to a further first drive unit exhibiting two circumferential tracks (see above), wherein the counter wheels exhibit two pulleys at a lever arm, each of the pulley being connected to an individual track, such that the counter wheels are guided along the circumferential tracks when the vehicle is moving in the second spatial direction.
- the counter wheels can also exhibit gear grooves to mesh with gear teeth in the structure. The counter wheels press against the profile units from the side of the vehicle, enhancing force fit/form fit coupling.
- the first spatial direction (x) is parallel to the ground.
- This suspended system is advantageous in terms of coupling security between the vehicle/s and the structure/s. Especially heavy/large bins can be moved with this Automatable system for the transport of transport cabins.
- the second spatial direction (y) is parallel to the ground.
- the structure is in this case preferably arranged at a vertical plane.
- This configuration allows for a particularly high number of transportations between transfer positions, because the first spatial direction (x) pointing upwards, means that the movement speed in first spatial direction is determined by the second kind of drive unit, which can comprise e.g., the described holonomic wheelset and can work in general at higher speeds than the first drive unit.
- the control component is in particular a central component of one of the transport systems presented in this application.
- the control component is designed in such a way that it controls as many or even all of the processing steps of the cabins as possible.
- the control component only controls individual process steps as described in this application.
- control component of the transport system can be designed in such a way that the control component can carry out individual or several or even all of the procedures presented in this application.
- the invention can also be described by the following characteristics.
- the characteristics presented below can be combined with each other as well as with the following presentation of preferred embodiments based on the figures, whereby particularly preferred combinations of characteristics are highlighted by reference to previously presented combinations of characteristics.
- Automatable system for the transport of transport cabins for, with a guiding arrangement for transporting the cabins, wherein the guiding arrangement comprises independently movable vehicles.
- Automatable system for the transport of transport cabins with a guiding arrangement for transporting the cabins, wherein the guiding arrangement comprises independently movable vehicles.
- BA Method of using an automatable system for the transport of transport cabins with vehicles, each configured for moving along the guiding arrangement wherein the guiding arrangement is configured for active motion of the vehicle in said first spatial direction and/or said second spatial direction so that the vehicles can move individually.
- BB Method of using an Automatable system for the transport of transport cabins, with a guiding arrangement for transporting a cabin with a vehicle, each vehicle configured for moving along the guiding arrangement wherein the guiding arrangement is configured for active motion of the vehicle in said first spatial direction and/or said second spatial direction so that the vehicles can move individually, wherein the vehicle moves omnidirectionally along the at least one structure especially allowing for (fast) passing maneuvers thus increasing the number of transportations.
- CA Ceiling suspension arrangement for lifting, transferring and lowering containers comprising at least one crawler type ceiling unit and a ceiling structure extending in at least two spatial directions wherein the ceiling structure comprises a plurality of profile units extending in a first spatial direction, wherein the ceiling structure defines in at least an area at least one structural regularity in a second spatial direction; and wherein the at least one crawler type ceiling unit comprises a plurality of suspension elements configured for suspending the at least one crawler type ceiling unit and configured for coupling the at least one crawler type ceiling unit to the ceiling structure by means of de-/coupling kinematics during a motion of the at least one crawler type ceiling unit in said second spatial direction, particularly depending on a relative motion of the at least one crawler type ceiling unit with respect to the ceiling structure in at least said second spatial direction, especially with the crawler type ceiling unit being configured to be moved in said first spatial direction along the profile units irrespective of momentary motion in said second spatial direction y; and wherein the at least one ceiling unit comprises at least one hoist unit 50, wherein the
- CB Ceiling suspension arrangement 100 especially with a combination of previously presented characteristics, respectively combinations of characteristics BA to BE and/or CA, wherein the crawler type ceiling unit comprises at least two circumferential tracks 12, 12a, 12b, wherein the suspension elements are attached to the circumferential tracks at predefined longitudinal positions corresponding to the structural regularity, wherein the circumferential tracks respectively define a specific path of circumferential motion of the respective suspension elements, thereby providing de-/coupling kinematics during a motion of the crawler type ceiling unit in said second spatial direction y.
- CC Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA and/or CB, wherein the at least one crawler type ceiling unit comprises:
- At least one crawler type ceiling unit comprises at least one (further) drive unit, wherein the at least one further drive unit is configured for at least one of the following functions:
- Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to CD, wherein the ceiling suspension arrangement comprises at least one sensing device comprising at least one sensor, wherein the at least one sensing device is configured to provide sensor data related to at least one of the following:
- Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to CE comprising a tracking system, wherein the at least one crawler type ceiling unit and/or the ceiling structure comprises a tracking unit; and/or wherein the at least one crawler type ceiling unit comprises at least one sensor from the following group: speed sensor, distance sensor, position measuring sensor, force sensor, acceleration sensor.
- Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to CF, wherein the system comprises at least one control unit, wherein the at least one control unit is characterized in at least one of the following, particularly based on corresponding sensor data:
- Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to CG, wherein the ceiling suspension arrangement comprises a supporting structure for the ceiling structure.
- Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to CH, wherein the at least one hoist unit of the at least one crawler type ceiling unit is configured to lift, transfer and lower a container arrangement of at least two containers 60, wherein the at least two containers are arranged in a side-by-side and/or superimposed manner.
- Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to Cl, wherein the ceiling suspension arrangement comprises at least two crawler type ceiling units , wherein at least two of the at least two crawler type ceiling units are configured to lift, transfer and lower a container or an arrangement of at least two containers, wherein the at least two containers are arranged in a side-by-side and/or superimposed manner, wherein the gripping units of the at least two crawler type ceiling units connect to the container or the arrangement of the at least two containers 60 at least at two different gripping points.
- Ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to CJ, wherein at least a part of the ceiling structure is arranged at a height, which is above the height of a container transport ceiling unit and/or container stack and/or freight-carrying ceiling unit.
- the at least one gripping unit comprises a mechanism for connecting at least semi-autonomous to at least one container; and/or wherein the at least one hoist unit comprises a connector unit for connecting the at least one gripping unit with the at least one container in an at least semi-autonomous manner.
- Container port comprising at least one ceiling suspension arrangement especially with a combination of previously presented characteristics, respectively combinations of characteristics CA to CL, wherein the at least one ceiling suspension arrangement is configured to load and/or unload at least one container transport ceiling unit and/or transfer containers to freight-carrying ceiling units and/or uninterruptedly transfer containers to a storage yard and/or uninterruptedly transfer at least one container from at least a first container transport ceiling unit to at least a second container transport ceiling unit.
- the Automatable system for the transport of transport cabins further comprises - at least one route planning tool for route planning along the at least one structure.
- the at least one vehicle can exhibit a sensing device exhibiting at least one sensor from the following group: speed sensor, distance sensor, height and position measuring sensor, force sensor, acceleration sensor resp. gyroscope.
- the automatable system for the transport of transport cabins is configured for transmitting commands to a communication unit of the at least one vehicle, especially to the communication units of all vehicles individually, such that control units of the vehicles control their respective vehicle based on received commands as well as based on momentary measuring data of at least sensor.
- the communication unit can be configured for wireless communication at least within the automatable system for the transport of transport cabins, wherein the (respective) vehicle or the suspension structure provides energy to the communication unit, especially such that the communication unit of the vehicle is energetically self-sustaining (autarkic) for at least a period of several days or weeks or month.
- the automatable system for the transport of transport cabins can be configured for localizing individual vehicles based on at least one locating signal transmitted by individual vehicles (passively or actively, e.g., passively based on at least one individual transmitter, especially based on individual identification features). Additionally, the vehicles transmit sensor data and information about destination transfer positions to the at least one route planning tool when a request to do so is received in the communication unit of the vehicle.
- a route-planning tool plans a path for at least one vehicle connected to at least one connection element along at least one structure from one transfer position to another, especially taking into account at least momentary positions and paths of at least one other vehicle, especially all vehicles also coupled to the at least one structure, wherein the vehicle moves omnidirectionally along the at least one structure, especially allowing for (fast) passing maneuvers. This increases the number of transportations between transfer positions.
- a computer implemented method for route-planning for an automatable system for the transport of transport cabins comprising the following steps:
- the crawler type vehicles can exhibit at least one first drive unit 11 which may provide for accommodation of a crawling or driving mechanism 11.1 with motor(s), which allows for circumferential motion of suspension elements 13 along circumferential tracks 12, namely simultaneously along a first and a second circumferential track 12a, 12b, which tracks exhibit individual shapes/contours XZa, XZb.
- the tracks only extend two-dimensionally (2D), i.e., in a plane, and the shape is different at least in curved sections 12r of the tracks.
- Each track 12a, 12b exhibits a parallel/linear section 12p (resp. two parallel sections) and at least one redirection/curved section 12r (resp. two curved sections).
- a lateral area resp. surface shell of the at one chassis or housing is preferably flat, plane, even, respectively on each lateral side. Such a configuration is favorable in view of interconnection of several housings 17 (side by side).
- the crawler type vehicle 10 exhibits at least one further housing 17 (preferably in the same drive unit 11) exhibiting first and second circumferential tracks 12a, 12b and accommodating a plurality of further suspension elements 13b which are arranged mirror-inverted, with respect to the suspension elements 13 of the first housing 17.
- Both types of suspension elements 13, 13b can be arranged within the same drive unit 11, and optionally, both types of suspension elements 13, 13b can be guided by the same pair of circumferential tracks 12a, 12b.
- the drive unit 11 may actively provide for a traveling motion (e.g., by a synchronous guiding/driving motion of/to the suspension elements 13, 13b).
- Several first drive units 11a, 11b, 11c can be interconnected, e.g., via crossbeams or the like.
- the desired/required traveling motion can be controlled via a control unit which can be coupled to at least one motor 11.5.
- a drive section may also comprise at least one gear unit 18 configured for interacting with the track(s) and at least one energy storage unit.
- a sensor arrangement exhibiting at least one sensing device, e.g., comprising position sensors and velocity sensors and/or weight sensors and/or gyroscopes, may provide sensor data to the control unit.
- each suspension element 13, 13a, 13b exhibits a first pulley 13.1 and a second pulley 13.2, and optionally, at least one wheel 13.3 is provided at the free end of the suspension element 13 (bearing point/coupling point P13).
- the first and second pulleys are arranged on a lever arm 13.5 in distance from/to each other (y-offset, longitudinal extension y13 of lever arm); the bearing point P13 resp. the wheel 13.3 is arranged at a protruding section resp. suspension arm 13.6 (z-offset).
- power-slider 13.4 (conductive slider for energy transfer) is provided in an arrangement geometrically corresponding to a/the power rail 1.3 of the respective profile unit 1.1.
- the plurality of suspension elements 13 of a/the respective first drive unit 11 can be interconnected via longitudinal connecting elements 15 which can ensure a closed loop 15a of interrelated suspension elements.
- the suspension elements 13 are coupled to the respective circumferential tracks.
- the suspension elements preferably exhibit at least one wheel 13.3 performing a rolling motion on the profile units 1.1, preferably on the wheel tread 1.2 and preferably additionally on the side of the profile units, of the structure 1, allowing for a motion which is orthogonal to the motion predefined and evoked by the tracks 12, wherein the wheel 13.3 is positioned and aligned orthogonally with respect to the first and second pulleys 13.1, 13.2.
- the wheel can be motorized e.g., by means of further actuators or motors.
- the first pulley 13.1 is engaged with the first or second circumferential track, thereby following the contour defined by said track; also, the second pulley 13.2 is engaged with the first or second circumferential track, thereby following said track (which is different from the track engaged by the first pulley, i.e., vice versa).
- the lever arm 13.5 is preferably L-shaped, especially provided as integral element in one piece (massive, solid).
- the structure 1 and its raster 1a is defined by profile units 1.1 being arranged in parallel and with similar distance (pitch) to adjacent profile units.
- Each profile unit is preferably configured to support geometries/surface(s) which are adequate for interaction with the wheel(s) of the suspension elements (e.g. T-profile, C-profile, L-profile, I-profile), and a series of such profile units preferably provides for a planar surface or for a tubular surface at least in sections.
- the (respective) first drive units 11, and the kinematics defined by the shape of the tracks provide for de-/coupling kinematics 20 which ensure both horizontal/vertical motion kinematics and non-circular pivot motion kinematics.
- de-/coupling of each suspension element can be affected via circumferential motion along the tracks without the need of any axial telescopic motion within each suspension element, i.e., the respective suspension element can be designed as purely mechanic unit.
- the first pulley 13.1 of each suspension element 13 rotates about a first pulley axis and defines a first guiding point G13.1 (coupling the first track and the respective suspension element), and vice versa, the corresponding point of the corresponding circumferential track defines that first guiding point G13.1 for each suspension element.
- the second pulley 13.2 of each suspension element 13 rotates about a second pulley axis (which is preferably aligned in parallel) and defines a second guiding point G13.2 (coupling the second track and the respective suspension element).
- an instantaneous centre of rotation of each suspension element is defined by the axis of the first pulley 13.1 being coupled to the first track 12a, wherein coupling/attachment/fixation can be ensured e.g. at the axial section between a/the suspension arm 13.6 and the first pulley 13.1.
- the two tracks 12a, 12b are arranged with respect to another in such a manner that the contacting/bearing point/area P13 (coupling point) of the respective suspension element 13 can be hooked or hitched in the structure.
- the wheel 13.3 of each suspension element rotates about a wheel axis which is preferably aligned orthogonally to the first and second pulley axis.
- each suspension element 13 is coupled to the tracks 12a, 12b in predefined positions, namely in a predefined first longitudinal position y12a via the first pulley 13.1 and in a predefined second longitudinal position y12b via the second pulley 13.2, when driving the tracks resp. when guiding the suspension elements along the tracks, the bearing point P13 at the free end of the suspension element 13 is guided according to the relative position/contour and distance of the corresponding tracks (of a pair of tracks guiding the respective suspension element).
- the crawler type vehicle 10 may exhibit a control unit which can be a decentral (individual) control unit. Further, a respective crawler type vehicle 10 may exhibit a communicating unit (e.g., near field, mobile network, LAN, LP-WAN, SigFox, NBIoT) and/or a transmitter (active or passive), especially for transmitting locating signals. These components are configured to interact in/with a positioning system or route-planning tool.
- a communicating unit e.g., near field, mobile network, LAN, LP-WAN, SigFox, NBIoT
- a transmitter active or passive
- a digital twin referring to a respective crawler type vehicle 10 and/or a digital twin referring to a respective load can be stored in a database of a route-planning tool.
- the database is configured for storing and accessing the at least one digital twin at least comprising information of momentary status, wherein the suspension arrangement is configured to define at least one control parameter for individual crawler type vehicles based on information of the at least one digital twin.
- x designates a/the first spatial direction (especially cross direction, especially direction of longitudinal extension of profile units), and y designates a/the second spatial direction (especially longitudinal direction or momentary driving direction of the crawler type vehicle), and z designates a/the third spatial direction.
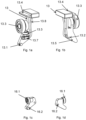
- a suspension element 13 is shown in an isolated view from a "front" and “back” side.
- a first pulley 13.1 intended to be pulled along a circumferential track 12, 12b is shown.
- the suspension element 13 exhibits two elements of motion 13.3, a first wheel to roll on a wheel tread 1.2 of a profile unit 1.1, and a second wheel to roll on a side of the wheel tread 1.2.
- the suspension element 13 exhibits a first electrical contact ("current collector") 13.4 to connect to a power line 1.3 integrated into the structure 1 and a second electrical contact 13.7 electrically connected to the first electrical contact 13.4 via a wire 13.8 to provide power to an internal bus of a crawler type vehicle 10.
- Fig. 1c and 1d show wheels 16.1 of a counter mechanism 16, wherein the wheels 16.1 push on a "bottom" side of a profile unit 1.1 further enhancing force fit coupling between the crawler type vehicle 10 and the structure 1. Similar to the suspension elements 13, the counter wheels 16.1 exhibit pulleys 16.2 intended to be pulled via a chain/belt 16a and guided along a circumferential track to follow a predefined path of motion.
- a crawler type vehicle 10 exhibits at least one first set of suspension elements 13 with a first orientation, at least one second set of suspension elements of suspension elements 13b facing in opposite direction (mirror-inverted) and at least one set of counter wheels 16, such that a "T"-shaped profile unit can be clamped between the wheels from all (six) sides, i.e., both sides (top and bottom) of the wheel tread as well as a side of the wheel tread.
- “Top” and “bottom” in this case are the sides facing away from the crawler type vehicle and towards the vehicle respectively and do not limit the crawler to be used in a ceiling arrangement.
- the clamping of the profile unit (preferably from all sides) allows vehicles to switch between structures exhibiting different orientations (e.g., being arranged at a wall, a ceiling, the floor).
- the crawler type vehicle 10 can follow an intended direction resp. an intended path of motion in the structure shown in Fig. 2 .
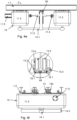
- Fig. 2a shows a cross-section of an energy charging area P10.
- the profile units 1.1 respectively exhibit treads 1.2, wherein suspension elements 13 exhibit at least one wheel 13.3 for gliding or rolling, arranged and configured for moving the crawler type vehicle 10 in the first spatial direction (x).
- the crawler type vehicle 10 enables two closed loop trajectories of at least two subsets of respective suspension elements, as can be seen in Fig. 2d-j .
- the circumferential tracks 12, 12a, 12b are shaped in such a manner that the respective suspension elements 13 are de-/coupled from/into the structure 1 when passing a curved section 12r of the tracks 12a, 12b.
- One subset of the suspension elements 13 is attached to one of the circumferential tracks (resp. a subset of the first subset, momentary) and one further subset of the suspension elements 13 are attached to a further one of the circumferential tracks (resp. a subset of the second subset, momentary) respectively at predefined first and second (further) longitudinal positions respectively corresponding to the structural regularity 1a, with each suspension element being guided by a pair of circumferential tracks.
- the suspension elements 13 are fixedly attached/coupled by means of a first pulley 13.1 to/with a/the first circumferential track 12a and are guided within a/the second circumferential track 12b by means of a second pulley 13.2 respectively, wherein the first pulley 13.1 and the second pulley 13.2 are arranged at a lever arm 13.5 of the respective suspension element 13.
- a respective subset of said suspension elements 13 is connected to each other by means of longitudinal connecting elements 15 (chain elements) forming a closed loop of interrelated suspension elements 15a distanced to each other in the predefined structural regularity 1a, as can be seen in Fig. 2k m.
- suspension elements 13a, 13b exhibits two kinds/types of suspension elements 13a, 13b, wherein the different types of suspension elements 13 are de-/coupled according to individual kinematics (here, in opposite directions/sides at the profile units 1.1, both in and opposite to the second spatial direction (y) resp. travel direction of the crawler type vehicle 10), wherein a first subset of the suspension elements 13a are attached to a first pair of circumferential tracks 12a, 12b (resp. a subset of the first subset, momentary) and at least one further subset of the suspension elements 13b are attached to a second pair of circumferential tracks 12a, 12b (resp.
- first and second pairs of circumferential tracks 12a, 12b provide for individual kinematics for the first and second subsets of suspension elements 13a, 13b, especially such that the crawler type vehicle 10 can be secured with respect to opposite sides/directions (of the second spatial direction) at the structure 1 resp. at the profile units 1.1.
- each suspension element 13, 13b is guided by a pair of circumferential tracks 12a, 12b, wherein the crawler type vehicle 10 exhibits at least three pairs of circumferential tracks 12a, 12b, each guiding a subset of the suspension elements 13, 13b, wherein said de-/coupling kinematics are predefined by said three pairs of circumferential tracks 12a, 12b in such a manner that respective suspension elements 13a, 13b (resp. a subset of the respective subset, momentary) simultaneously de-/couple both at a first side (resp. first longitudinal position) of a respective profile unit 1.1 and at a second side (resp.
- the vehicle exhibits three (first) drive units 11a, 11b, 11c, wherein two of the drive units 11, 11c comprise suspension elements 13 with a first orientation, and the drive unit 11b in the middle exhibits suspension elements with mirror-inverted orientation.
- the crawler type vehicle 10 exhibits at least one motor 11.5 (not shown here) interacting with at least one of the circumferential tracks 12.
- the crawler type vehicle 10 also exhibits an energy storage unit (also not depicted) providing energy to a/the at least one motor of the crawler type vehicle 10.
- the exemplary crawler type vehicle 10 also exhibits electrical contacts 13.4 to connect to a power line 1.3 in the structure 1.
- the power line can be AC or DC, and additionally provide for a communication bus, i.e., powerline communication.
- the crawler type vehicle 10 in Fig. 2c exhibits a protective casing 14.
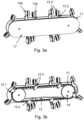
- the (first) drive unit 11 shown in Fig. 3a exhibits suspension elements 13, 13b of the kind described in Fig. 1a, 1b but without the electrical contacts. The electrical contacts being hidden in the remaining figures is for easier interpretation and clarity only.
- a first set of suspension elements 13 is facing in a first direction, while a second set of suspension elements 13b is facing in a second direction, opposite to the first direction.
- the (first) drive unit 11 comprises two circumferential tracks 12a, 12b for each set of suspension elements 13, 13b (i.e., in total four circumferential tracks), as described with respect to Fig. 2d-2m .
- the second housing 17 exhibiting the two circumferential tracks 12a, 12b for the second set of suspension elements 13b is hidden in Fig.
- FIG. 3b to show how the suspension elements 13, 13b can be connected to a common chain 15a (e.g., via pulleys 13.1 of both sets of suspension elements 13, 13b) which can be driven by a gear unit 18 connected to a motor 11.5.
- Fig. 3c and Fig. 3d show a further unit 16 (counter unit) guiding counter wheels 16.1 for also contacting profile units 1.1 from a "bottom" side with the same shape as the first drive unit 11.
- the counter wheels 16.1 alone cannot suspend/fix the crawler type vehicle 10.
- the counter wheels 16.1 only serve as a counter mechanism to push against the structure 1 to increase the force coupling between the suspension elements 13 and the structure 1.
- the counter wheels 16.1 also exhibit pulleys 16.2 via which they are pulled along two circumferential tracks to follow a predefined motion.
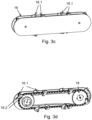
- Two (first) drive units 11 exhibiting two sets of suspension elements 13a, 13b respectively being arranged mirror-inverted to grasp a profile unit 1.1 from two sides, as well as two sets of counter wheels 16.1, are shown in Fig. 3e and Fig. 3f .
- the drive units from Fig. 3e and 3f are shown from a diagonally above perspective in Fig. 3g and Fig. 3h .
- the drive units 11 are connected to form a (first) drive arrangement 11.2 comprising two (first) drive units 11 and a counter unit 16.
- the drive arrangement 11.2 can be driven via a common shaft connected to the gear units 18 of the drive units 11 and counter unit 16 as shown in Fig. 3b and Fig. 3d .
- the mirror-inverted set of suspension element 13b is hidden behind the profile unit 1.1 in Fig. 3g and 3h . It is preferred to always have at least one set of mirror-inverted suspension elements 13b in order to enhance coupling security with the structure 1.
- the (first) drive units 11 from Fig. 3e and Fig. 3f form a first drive arrangement with a common motor 11.5 in Fig. 4a .
- an additional casing 14 is shown in Fig. 4b .
- the casing 14 exhibits a ball 14.2 of a ball joint 14.1 in the center of the drive arrangement (both in first x and second y direction).
- the (first) drive units 11a, 11b of the first drive arrangement 11.2 may need some flexibility even though they are very close together in order to follow curved profile units 1.1.
- a short splined shaft with a universal joint can exemplarily be used to account for the small changes in angle between the (first) drive units 11 (of one first drive arrangement) when the vehicle 10 is following curved profile units 1.1 (in first spatial direction x).
- Fig. 4c shows a crawler type vehicle 10 according to one embodiment.
- the crawler type vehicle 10 exhibits two arrangements 11.2 of the type shown in Fig. 4b . It is however also possible to only use one (first) drive unit 11 for each of the arrangements 11.2.
- the two casings 14 of the arrangements 11.2 are coupled via a ball joint 14.1.
- the ball joint 14.1 preferably connects to a framework 14.3 of the vehicle 10 as shown in Fig. 4d .
- the (first) drive units 11 of the two drive arrangements 11.2 are connected via a drive mechanism 11.1 comprising a splined shaft 11.3 with universal joints 11.4, a close-up view of which can be found in Fig. 4c .
- two holonomic wheelsets 90 are shown in Fig.
- a motor 91 engages in a differential 91.1 connected to the holonomic wheelsets 90.
- the motor 91 and the holonomic wheels 90 are connected to the vehicle framework 14.3 in the middle between the two drive arrangements 11.2.
- Fig. 4e shows the crawler type vehicle 10 from a side-view perspective (from the second spatial direction).
- Fig. 4f shows the suspension elements 13, 13b of the crawler type vehicle 10 clamping the profile unit 1.1.
- the holonomic wheelsets 90 can be pressed against the profile units 1.1 from the bottom side (side facing the vehicle) with an additional return mechanism 90.1 not shown here.
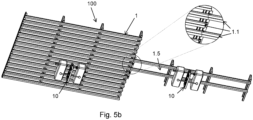
- Fig. 5a shows a first suspension arrangement 100 according to an embodiment.
- the suspension arrangement 100 comprises a structure 1 with a crawler type vehicle 10 suspended in the structure 1.
- a first conveyor/connector rail 1.5 leads out of the structure 1 e.g., to a further structure 1'.
- the first conveyor/connector rail 1.5 comprises two directly adjacent profile units 1.1.
- a second conveyor/connector rail 1.5 comprises two profile units 1.1 further spaced apart.
- the profile unit can be spaced apart any integer multiple of the pitch of the structural regularity 1a.
- Using profile units 1.1 further spaced apart for the conveyor/connector rail 1.5 can increase the stability of the crawler type vehicle 10 when driving along the conveyor/connector rail 1.5, especially in curved sections.
- Fig. 6 shows a further suspension arrangement 100 comprising a structure 1 and a crawler type vehicle 10 of the kind described in Fig. 4d to Fig. 4f .
- a conveyor/connector rail 1.5 describing a curve 1.5r leads out of the structure 1.
- a crawler type vehicle 10 driving along the curve 1.5r is also shown in a close-up view.
- the crawler type vehicle 10 is able to follow the curved conveyor/connector rail 1.5 due to the (first) drive units 11 (resp. the drive arrangements 11.2) being able to deviate from their original parallel orientation because of the ball joint 14.1 connecting the at least two (first) drive units (here connecting the casings 14 of the drive arrangements 11.2 comprising multiple drive units 11a, 11b and possibly also a counter unit 16).
- a suspension arrangement 100 according to a further embodiment is shown.
- the suspension arrangement 100 comprises two structures 1, 1', wherein one of the structures 1' comprises curved profile units 1.1, a conveyor/connector rail 1.5 and two crawler type vehicles 10.
- the profile units 1.1 must follow a continuous curve, essentially without kinks.
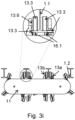
- the profile units always have to exhibit the structural regularity 1a in second spatial direction y (depending on orientation of the first spatial direction x, essentially always orthogonal to the first spatial direction x) such that a coupling as shown in Fig. 3i is always ensured.
- the crawler type vehicle 10 is able to move (or to be moved) in the first spatial direction x (right or left along the curved profile units) irrespective of momentary motion in second spatial direction y.
- the orientation between the at least two drive units 11 (of the first kind) changes depending on the position of the vehicle in the structure 1' exhibiting curved profile units 1.1, i.e., the farther out (with respect to the radius of the curve) the vehicle 10 is in the structure 1, the smaller is the angle between the orientations of the drive units (of the first kind).
- the details of a crawler type vehicle 10 following a curved conveyor/connector rail 1.5r is shown in Fig. 8 from a perspective view from diagonally above.
- the suspension elements 13 engage in the same manner with the profile units 1.1 as in Fig. 7 in the structure exhibiting the curved profile units 1.1.
- the suspension elements 13 of the (first) drive units 11 couple to the profile units 1.1 via the elements of motion 13.3 (preferably first wheel and side wheel (see Fig. 3i ), preferably from both sides of the profile unit 1.1 via mirror-inverted suspension elements 13 not shown here).
- a further suspension arrangement 100 is shown, wherein the suspension arrangement 100 comprises a structure 1, two crawler type vehicles 10 and a conveyor/connector rail 1.5 leading out of the structure 1.
- the conveyor/connector rail 1.5 leads upwards on a curve 1.5r out of the plane defined by the structure 1.
- the crawler type vehicle 10 exhibits a return mechanism 90.1 connected to the vehicle framework 14.3 and the holonomic wheelsets 90.
- Fig. 9 the crawler type vehicle 10 exhibits a return mechanism 90.1 connected to the vehicle framework 14.3 and the holonomic wheelsets 90.
- the crawler type vehicle going upwards on the conveyor/connector rail 1.5 is shown in a perspective view from diagonally above.
- a close-up view further shows the return mechanism 90.1 applying a force onto the two holonomic wheelsets 90.
- the ball joints 14.1 of the crawler type vehicle 10 allow for the (first) drive units 11 to be tilted with respect to each other in any direction, i.e., not only left-right, but also up-down thus allowing the crawler type vehicle 10 to follow parallel profile units 1.1 going upwards/downwards, left/right as well as any combination thereof.
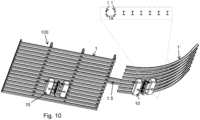
- Fig. 10 shows a further suspension arrangement 100 according to an embodiment.
- the suspension arrangement 100 exhibits two structures 1, 1' connected via a conveyor/connector rail 1.5 and two crawler type vehicles 10.
- One of the structures 1' exhibits curved profile units 1.1 describing a segment of a tube-like shape.
- the profile units 1.1 define the same structural regularity 1a in the second spatial direction y as before (see Fig. 3i ).
- the crawler type vehicle 10 is able to move (or to be moved) in the first spatial direction x (upwards or downwards the curved profile units) irrespective of momentary motion in second spatial direction y.
- Figures 12a, 12b , 13a, 13b , 14a, 14b , 15a,15b , 16 , 17 , 18 , 19 , 20 , 21a, 21b, 21c , 22a, 22b, 22c , 23 , 24, 25, 25 , 26, 27 show a part of an automatable system for the transport of transport cabins, especially outdoors, wherein a guiding arrangement for guiding arrangement for transporting a cabin with a vehicle, especially a crawler type vehicle 10, wherein the vehicle 10 can move along a track, preferably at least two tracks 9001, 9002 which are a part of the guiding arrangement g
- the tracks 9001, 9002 are straight tracks.
- the tracks 9001, 9002 are curved tracks.
- At least a part of the tracks 9001, 9002 are in at least one track segment straight and in at least another track segment curved.
- the transport cabins 9700, 9701, 9703 are equipped as transport cabins for transporting people.
- the transport cabins are equipped as containers for the transport of all transportable items, ranging from goods objects to cars.
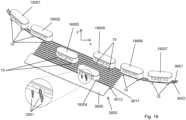
- Figure 16 shows an embodiment of a track changing arrangement 9600 in which a transport cabin 9700 can change from a first position 9701 on tracks 9001 to 9002 during its movement to another position 9703 on tracks 9011, 9012 by moving in relative motion of the vehicle 10 with respect to the structure 1, 1' in at least a second spatial direction y, while being capable of maintaining its movement in a first spatial direction x.
- the track changing arrangement 9600 can operate without a switch.
- Figure 1 , 18 show embodiments of an automatable system for a transport of cabins according to the invention with a plurality of tracks.
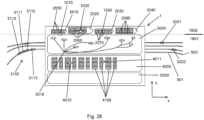
- Figs. 19 and 20 show a passenger station 2000 at which cabins 19001, 19002, 19003, 19004, 19005, 19006 and 19007, respectively 20001, 20002, 20002, 20003, 20004, 20005, 20006, 20007 can move independently from each other. While some cabins, e.g. cabins 20003, 19005 move uninterrupted along the tracks 9001, 9002 at least one other cabin 19003, 19004, 20004, 20005 moves in -y-direction towards/from a platform 9900.
- passengers 2001 can enter/leave the cabin 19004, 20004.
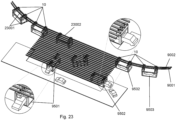
- the containers 21000, 22000, 23001, 23002, 9501, 9500, 95001, 9502 and 9503 are designed for accommodating passengers in the cars during the transport of the cars in the specially equipped containers 21000, 22000, 23001, 23002, 9501, 9500, 95001, 9502 and 9503.
- electric cars can be charged during their transport in the containers 21000, 22000, 23001, 23002, 9501, 9500, 95001, 9502 and 9503.
- the cabin is connected to at least two transport vehicles 10, 10'.
- the orientation of the transport cabin can change from a first orientation 9801 via an intermediary orientation 9802 to another orientation 9803 perpendicular to the first orientation 9801.
- the automatable system for the transport of transport cabins, especially outdoors, described according to the figures can be combined with a ceiling suspension arrangement 100 for lifting, transferring and lowering containers 60 comprising at least one crawler type ceiling unit 10 and a ceiling structure 1 extending in at least two spatial directions x, y, wherein the ceiling structure 1 comprises a plurality of profile units 1.1 extending in a first spatial direction x, wherein the ceiling structure 1 defines in at least an area at least one structural regularity 1a in a second spatial direction y; and wherein the at least one crawler type ceiling unit 10 comprises a plurality of suspension elements 13, 13a, 13b configured for suspending the at least one crawler type ceiling unit 10 and configured for coupling the at least one crawler type ceiling unit 10 to the ceiling structure 1 by means of de-/coupling kinematics during a motion of the at least one crawler type ceiling unit 10 in said second spatial direction y, particularly depending on a relative motion of the at least one crawler type ceiling unit 10 with respect to the ceiling structure 1 in at least said second
- a ceiling suspension arrangement 100 for lifting, transferring and lowering containers 60 comprising at least one crawler type ceiling unit 10 and a ceiling structure 1 extending in at least two spatial directions x, y
- the ceiling structure 1 comprises a plurality of profile units 1.1 extending in a first spatial direction x, wherein the ceiling structure 1 defines in at least an area at least one structural regularity 1a in a second spatial direction y
- the at least one crawler type ceiling unit 10 comprises a plurality of suspension elements 13, 13a, 13b configured for suspending the at least one crawler type ceiling unit 10 and configured for coupling the at least one crawler type ceiling unit 10 to the ceiling structure 1 by means of de-/coupling kinematics during a motion of the at least one crawler type ceiling unit 10 in said second spatial direction y, particularly depending on a relative motion of the at least one crawler type ceiling unit 10 with respect to the ceiling structure 1 in at least said second spatial direction y, especially with the crawler
- Figures 24, 25, 25 , 26, 27 show a part of a ceiling suspension arrangement 100 for lifting, transferring and lowering containers 60, 60a, 60b, 60d, comprising at least one crawler type ceiling unit 10 especially designed as previously described in Figs. 13a and 13b in detail and a ceiling structure 1 extending in at least two spatial directions x, y, wherein the ceiling structure 1 comprises a plurality of profile units 1.1 extending in a first spatial direction x, wherein the ceiling structure 1 defines in at least an area at least one structural regularity 1a in a second spatial direction y; and wherein the at least one crawler type ceiling unit 10 comprises a plurality of suspension elements 13, 13a, 13b configured for suspending the at least one crawler type ceiling unit 10 and configured for coupling the at least one crawler type ceiling unit 10 to the ceiling structure 1 by means of de-/coupling kinematics during a motion of the at least one crawler type ceiling unit 10 in said second spatial direction y, particularly depending on a relative motion of the at least one crawl
- the container transported and/or lifted which is shown in Fig. 24 is an air-freight container 60a.
- This container is lifted transported and/or lifted by a ceiling unit 10 as the ceiling unit 10 is capable of transporting and/or lifting containers of different sizes and with different requirements.
- the container transported and/or lifted which is shown in Fig. 25 is a car-transport container 60b capable of transporting multiple cars 300.
- This container is lifted transported and/or lifted by a ceiling unit 10 as the ceiling unit 10 is capable of transporting and/or lifting containers of different sizes and with different requirements.
- the container transported and/or lifted which is shown in Fig. 26 is a car-transport container 60c capable of transporting a car 310.
- This container is lifted transported and/or lifted by a ceiling unit 10 as the ceiling unit 10 is capable of transporting and/or lifting containers of different sizes and with different requirements.
- the container transported and/or lifted which is shown in Fig. 27 is a standard ISO container 60d capable of transporting a variety of items according to the requirements for handling these items, e.g., cooling.
- This container is lifted transported and/or lifted by a ceiling unit 10 as the ceiling unit 10 is capable of transporting and/or lifting containers of different sizes and with different requirements.
- Figure 28 shows a ceiling suspension arrangement with a ceiling structure 1 extending in at least two spatial directions x, y, wherein the ceiling structure 1 comprises a plurality of profile units extending in a first spatial direction x, wherein the ceiling structure 1 defines in at least an area at least one structural regularity in a second spatial direction y as depicted before.
- the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 comprises a plurality of suspension elements, especially as described before, configured for suspending the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011, and configured for coupling the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 to the ceiling structure 1 by means of de-/coupling kinematics during a motion of the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 32010, 3202, 4010, 4011 in said second spatial direction y, particularly depending on a relative motion of the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111,
- the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 each can handle, especially lift and transport different containers.
- the ceiling units 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 can be identical or may be designed different with regard to the containers to be handled.
- the gripping unit is configured to connect and/or to be connected to at least one container.
- different gripping units can be implemented. It is especially useful to connect the ceiling unit to the gripping unit by a connecting means that, comprises a coupling section for easy coupling and decoupling, especially for changing / removing the gripping unit.
- the ceiling suspension arrangement comprises a tracking system, wherein the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 and/or the ceiling structure 1 comprises a tracking unit; and/or wherein the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 comprises at least one sensor from the following group: speed sensor, distance sensor, position measuring sensor, force sensor, acceleration sensor.
- the ceiling suspension arrangement described in Fig. 28 comprises at least one control unit, wherein the at least one control unit is characterized in at least one of the following, particularly based on corresponding sensor data:
- the ceiling suspension arrangement comprises a supporting structure for the ceiling structure 1.
- the at least one hoist unit of the at least one crawler type ceiling unit 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 is configured to lift, transfer and lower a container arrangement of at least two containers, wherein the at least two containers are arranged in a side-by-side and/or superimposed manner.
- the ceiling suspension arrangement comprises at least two crawler type ceiling units 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011, wherein at least two of the at least two crawler type ceiling units 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011are configured to lift, transfer and lower a container or an arrangement of at least two containers, wherein the at least two containers are arranged in a side-by-side and/or superimposed manner, wherein the gripping units of the at least two crawler type ceiling units 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 connect to the container or the arrangement of the at least two containers at least at two different gripping points.
- the ceiling suspension arrangement shown in Figure 18 can be installed according to requirements of a logistics system. It can be arranged above ships 2010, 2020, 2030, 2040 on a seaside 1802, above logistics entities on a landside 1801, e.g. constituting a transfer area 3000 of an overland transport system, above a container storage area 4000 or above a truck/train loading area 5000.
- At least a part of the ceiling structure 1 is arranged at a height, which is above the height of a container transport ceiling unit and/or container stack and/or freight-carrying ceiling unit.
- a container port comprising at least one ceiling suspension arrangement according to any preceding claim, wherein the at least one ceiling suspension arrangement is configured to load and/or unload at least one container transport ceiling unit and/or transfer containers to freight-carrying ceiling units and/or uninterruptedly transfer containers to a storage yard and/or uninterruptedly transfer at least one container from at least a first container transport ceiling unit to at least a second container transport ceiling unit.
- the ceiling suspension arrangement is enabled for a flexible transport of ceiling units 1010, 1020, 1030, 3010, 3110, 3111, 3112, 3201, 3202, 4010, 4011 to/from and between the ships, 2010, 2020, 2030, 2040, the transfer area 3000, the container storage area 4000 or above the truck/train loading area 5000 especially along transport paths.
- Figure 28 shows a snapshot of a process for operating the container port.
- This snapshot shows ceiling units 1010, 1020, 1030, which move items to/from ships ceiling units 3010 which move containers to from and within the transfer area 3000 of the overland transport system, ceiling units 3010, 3110, 3111, 3112, 3113 3201, 3202, currently moving along the overland transport system, wherein the ceiling units 3010, 3110, 3111, 3112, 3113 are arranged as a train 3100 with virtual drawbars.
- the ceiling units 4010, 4011 store containers to the container storage area 4000 and/or retrieve containers from the container storage area 4000.
- the described embodiments of the invention can be adapted to cabins to be transported with predefined upper and/or lower boundaries for their weight and/or size as well to handle transported cabins that can have different sizes, shapes and weights.
- the size and configuration of the ceiling arrangement and its components for transporting the cabins is partly predefined, especially by the dimension and strengths of profiles implemented in the structure.
- Other parts of the ceiling arrangement can be modified more easily, for example by providing vehicles with connection elements which are adapted to the cabins to be transported to the structure.
- the number of vehicles connected to the suspension structure can be modified.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Body Structure For Vehicles (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23200943.1A EP4530145A1 (de) | 2023-09-29 | 2023-09-29 | Automatisierbares system zum transport von transportkabinen; logistiksystem und verfahren zum handhaben mehrerer kabinen |
| PCT/EP2024/077304 WO2025068520A1 (en) | 2023-09-29 | 2024-09-27 | Automatable system for the transport of transport cabins; logistics system and method for handling of a plurality of cabins |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23200943.1A EP4530145A1 (de) | 2023-09-29 | 2023-09-29 | Automatisierbares system zum transport von transportkabinen; logistiksystem und verfahren zum handhaben mehrerer kabinen |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4530145A1 true EP4530145A1 (de) | 2025-04-02 |
Family
ID=88237939
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23200943.1A Pending EP4530145A1 (de) | 2023-09-29 | 2023-09-29 | Automatisierbares system zum transport von transportkabinen; logistiksystem und verfahren zum handhaben mehrerer kabinen |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4530145A1 (de) |
| WO (1) | WO2025068520A1 (de) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4641757A (en) | 1983-05-06 | 1987-02-10 | Robotic Systems, Inc. | Circulating latch transport mechanism for overhead cranes |
| JP2018192896A (ja) * | 2017-05-17 | 2018-12-06 | 国立大学法人 東京大学 | 旋回装置 |
| WO2019099984A1 (en) | 2017-11-17 | 2019-05-23 | Rohit Singhal | System and method for switching railcars using a static rail-track configuration |
| EP3705409A1 (de) | 2019-03-08 | 2020-09-09 | Space Applications Services NV/SA | Vorrichtung und verfahren zur androgynen kopplung sowie verwendung |
| US20230170238A1 (en) * | 2020-05-19 | 2023-06-01 | Murata Machinery, Ltd. | Overhead conveyance system |
| EP3803727B1 (de) | 2018-06-04 | 2023-07-26 | Celonis SE | Verfahren und system zum bereitstellen von prozessprotokollen für physische objekte |
| JP7347695B2 (ja) * | 2021-01-05 | 2023-09-20 | 村田機械株式会社 | 天井保管システム |
-
2023
- 2023-09-29 EP EP23200943.1A patent/EP4530145A1/de active Pending
-
2024
- 2024-09-27 WO PCT/EP2024/077304 patent/WO2025068520A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4641757A (en) | 1983-05-06 | 1987-02-10 | Robotic Systems, Inc. | Circulating latch transport mechanism for overhead cranes |
| JP2018192896A (ja) * | 2017-05-17 | 2018-12-06 | 国立大学法人 東京大学 | 旋回装置 |
| WO2019099984A1 (en) | 2017-11-17 | 2019-05-23 | Rohit Singhal | System and method for switching railcars using a static rail-track configuration |
| EP3803727B1 (de) | 2018-06-04 | 2023-07-26 | Celonis SE | Verfahren und system zum bereitstellen von prozessprotokollen für physische objekte |
| EP3705409A1 (de) | 2019-03-08 | 2020-09-09 | Space Applications Services NV/SA | Vorrichtung und verfahren zur androgynen kopplung sowie verwendung |
| US20230170238A1 (en) * | 2020-05-19 | 2023-06-01 | Murata Machinery, Ltd. | Overhead conveyance system |
| JP7347695B2 (ja) * | 2021-01-05 | 2023-09-20 | 村田機械株式会社 | 天井保管システム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2025068520A1 (en) | 2025-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2146894B1 (de) | Hafenlager und -verteilsystem für internationale versandbehälter | |
| US7972102B2 (en) | Automated marine container terminal and system | |
| US11260885B2 (en) | Overhead transport and route management system | |
| EP3368391B1 (de) | Zum transport von gegenständen mit verschiedener grösse konfigurierter träger | |
| JP2003500312A (ja) | 小口貨物、特にisoコンテナの積換え設備 | |
| CN113692559A (zh) | 基于地面的无人运输车辆和用于运输物品的方法 | |
| CN110239967B (zh) | 一种自动化集装箱堆场 | |
| US8439180B2 (en) | Conveyor cargo handling system and method of use | |
| US12559206B2 (en) | Storage and distribution system for containers | |
| EP4530145A1 (de) | Automatisierbares system zum transport von transportkabinen; logistiksystem und verfahren zum handhaben mehrerer kabinen | |
| CN108946015B (zh) | 搬运设备 | |
| EP4530244A1 (de) | Deckenaufhängungsanordnung zum heben, transportieren und senken von behältern, verfahren zum betrieb der deckenaufhängungsanordnung und mit der deckenaufhängungsanordnung ausgestatteter behälterport | |
| CN220431662U (zh) | 一种货运高铁装卸接驳设施设备 | |
| US20250236348A1 (en) | Ceiling suspension arrangement exhibiting at least one crawler type ceiling unit as well as method of suspending the ceiling unit at a ceiling structure | |
| EP4273030B1 (de) | Deckenaufhängungsanordnung, die mindestens eine raupenartige deckeneinheit aufweist, sowie verfahren zum aufhängen der deckeneinheit an einer deckenstruktur | |
| EP4530226A1 (de) | Automatisiertes regalbediensystem; logistiksystem und verfahren zum handhaben mehrerer gegenstände | |
| EP4530242A1 (de) | Aufzugssystem zum bewegen von personen zwischen stockwerken, verfahren zur verwendung eines aufzugssystems und computerimplementiertes verfahren zur routenplanung für ein aufzugssystem | |
| US20230002174A1 (en) | Systems and methods for loading, transporting, unloading, and sorting shipping containers using magnetic levitation | |
| WO2025208025A1 (en) | Grid storage system with above grip atu | |
| HK1144185B (en) | Port storage and distribution system for international shipping containers | |
| HK1260581B (en) | Overhead transport and route management system | |
| HK1260581A1 (en) | Overhead transport and route management system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20251002 |