ES2855200T3 - Procedimiento de control de un sistema de energía generada por el oleaje mediante un control obtenido minimizando una función objetivo ponderada y discretizada por el procedimiento trapezoidal - Google Patents
Procedimiento de control de un sistema de energía generada por el oleaje mediante un control obtenido minimizando una función objetivo ponderada y discretizada por el procedimiento trapezoidal Download PDFInfo
- Publication number
- ES2855200T3 ES2855200T3 ES17787933T ES17787933T ES2855200T3 ES 2855200 T3 ES2855200 T3 ES 2855200T3 ES 17787933 T ES17787933 T ES 17787933T ES 17787933 T ES17787933 T ES 17787933T ES 2855200 T3 ES2855200 T3 ES 2855200T3
- Authority
- ES
- Spain
- Prior art keywords
- conversion machine
- energy
- waves
- force exerted
- generated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03B—MACHINES OR ENGINES FOR LIQUIDS
- F03B13/00—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates
- F03B13/12—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy
- F03B13/14—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy using wave energy
- F03B13/16—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy using wave energy using the relative movement between a wave-operated member, i.e. a "wom" and another member, i.e. a reaction member or "rem"
- F03B13/18—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy using wave energy using the relative movement between a wave-operated member, i.e. a "wom" and another member, i.e. a reaction member or "rem" where the other member, i.e. rem is fixed, at least at one point, with respect to the sea bed or shore
- F03B13/1845—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy using wave energy using the relative movement between a wave-operated member, i.e. a "wom" and another member, i.e. a reaction member or "rem" where the other member, i.e. rem is fixed, at least at one point, with respect to the sea bed or shore and the wom slides relative to the rem
- F03B13/187—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy using wave energy using the relative movement between a wave-operated member, i.e. a "wom" and another member, i.e. a reaction member or "rem" where the other member, i.e. rem is fixed, at least at one point, with respect to the sea bed or shore and the wom slides relative to the rem and the wom directly actuates the piston of a pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03B—MACHINES OR ENGINES FOR LIQUIDS
- F03B13/00—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates
- F03B13/12—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy
- F03B13/14—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy using wave energy
- F03B13/16—Adaptations of machines or engines for special use; Combinations of machines or engines with driving or driven apparatus; Power stations or aggregates characterised by using wave or tide energy using wave energy using the relative movement between a wave-operated member, i.e. a "wom" and another member, i.e. a reaction member or "rem"
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03B—MACHINES OR ENGINES FOR LIQUIDS
- F03B15/00—Controlling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03B—MACHINES OR ENGINES FOR LIQUIDS
- F03B15/00—Controlling
- F03B15/02—Controlling by varying liquid flow
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2240/00—Components
- F05B2240/40—Use of a multiplicity of similar components
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/82—Forecasts
- F05B2260/821—Parameter estimation or prediction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/84—Modelling or simulation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/103—Purpose of the control system to affect the output of the engine
- F05B2270/1033—Power (if explicitly mentioned)
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/20—Purpose of the control system to optimise the performance of a machine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/30—Energy from the sea, e.g. using wave energy or salinity gradient
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Feedback Control In General (AREA)
Abstract
Procedimiento para controlar un sistema de energía generada por el oleaje que convierte la energía de la ola (3) en energía eléctrica o hidráulica, comprendiendo dicho sistema de energía generada por el oleaje al menos un medio móvil (2) que coopera con al menos una máquina de conversión (1) de energía, y dicho medio móvil (2) realiza un movimiento oscilatorio con respecto a dicha máquina de conversión (1), caracterizado porque se realizan las siguientes etapas: a) se construye un modelo dinámico de dicho sistema de energía generada por el oleaje que relaciona la velocidad de dicho medio móvil (2) con dicha fuerza ejercida por el oleaje (3) sobre dicho medio móvil (2) y con la fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2); b) se construye un modelo energético de dicho sistema de energía generada por el oleaje que relaciona la potencia media generada por dicha máquina de conversión (1) con la fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2), a la velocidad de dicho medio móvil (2) y la eficiencia de dicho sistema de energía generada por el oleaje; c) se predice la fuerza ejercida por las olas (3) sobre dicho medio móvil (2) durante un período de tiempo predeterminado; d) se determina un valor de control de dicha fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2) maximizando la potencia media generada por dicha máquina de conversión (1), implementando las siguientes etapas: i) se determina una función objetivo representativa de la potencia generada por dicha máquina de conversión (1) mediante dicha predicción de la fuerza ejercida por el oleaje (3) sobre dicho medio móvil (2), de dicho modelo dinámico y de dicho modelo energético; ii) dicha función objetivo se discretiza mediante el método trapezoidal; iii) los valores futuros del control se ponderan en dicha función objetivo discretizada mediante coeficientes de ponderación predeterminados; iv) dicho valor de control se deduce de dicha fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2) minimizando dicha función objetivo discretizada y ponderada; y e) dicha máquina de conversión (1) se controla mediante dicho valor de control.
Description
DESCRIPCIÓN
Procedimiento de control de un sistema de energía generada por el oleaje mediante un control obtenido minimizando una función objetivo ponderada y discretizada por el procedimiento trapezoidal
La invención se refiere al campo de los dispositivos para convertir la energía de las olas en energía eléctrica o hidráulica.
Los recursos energéticos renovables han experimentado un gran interés en los últimos años. Limpios, gratuitos e inagotables, tantos bienes importantes en un mundo superado por la inexorable disminución de los recursos fósiles disponibles y dándose cuenta de la necesidad de preservar el planeta. Entre estos recursos, la energía generada por el oleaje, una fuente relativamente desconocida en medio de las ampliamente publicitadas como la eólica o la solar, contribuye a la esencial diversificación del uso de las energías renovables. Los dispositivos, comúnmente llamados dispositivos de “energía de las olas”, son particularmente interesantes porque permiten producir electricidad a partir de esta fuente de energía renovable (la energía potencial y cinética de las olas), sin la emisión de gases de efecto invernadero. Son particularmente adecuados para suministrar electricidad a sitios insulares aislados.
Por ejemplo, las solicitudes de patente FR 2876751, FR 2973448 y WO 2009/081042 describen dispositivos para capturar la energía producida por el flujo del mar. Estos dispositivos están compuestos por un soporte flotante sobre el que se coloca un péndulo montado para desplazarse con respecto al soporte flotante. El movimiento relativo del péndulo con respecto al soporte flotante se utiliza para generar energía eléctrica por medio de una máquina de conversión de energía (por ejemplo, una máquina eléctrica). La máquina de conversión funciona como generador y como motor. De hecho, para proporcionar un par o una fuerza que impulsa el móvil, se suministra energía a la máquina de conversión para ponerla en resonancia con las ondas (modo motor). Por otro lado, para producir un par o fuerza que resista el movimiento del móvil, la potencia se recupera a través de la máquina de conversión (modo generador).
Por tanto, el movimiento del medio móvil es controlado por la máquina de conversión de energía para promover la recuperación de energía. Para optimizar la energía eléctrica recuperada por los sistemas de energía generada por el oleaje, se han considerado varios procedimientos para controlar la máquina de conversión. Algunos de estos procedimientos no son óptimos porque no se considera la predicción del oleaje. Además, estos procedimientos no tienen en cuenta las pérdidas de energía durante la conversión de energía en el sistema de energía generada por el oleaje. Por ejemplo, la solicitud de patente FR 2973448 (WO 2012/131186) describe dicho procedimiento.
Además, otros procedimientos combinan el control predictivo con un algoritmo que predice el oleaje. Sin embargo, estos algoritmos no permiten tener en cuenta las pérdidas de energía durante la conversión de energía en el sistema de energía generada por el oleaje, lo que no permite lograr un control óptimo que maximice la energía recuperada. Por ejemplo, el siguiente documento describe un procedimiento de este tipo: Giorgio Bacelli, John Ringwood, and Jean-Christophe Gilloteaux. “A control system for a self-reacting point absorber wave energy converter subject to constraints”. In: Proceedings of 18th IFAc World Congress. International Fédération of Automatic Control (IFAC).
2011, pp. 11387-11392.
El enfoque de control predictivo descrito en la solicitud de patente FR 3019235 (WO 2015/150102) es el primero que tiene en cuenta explícitamente la eficiencia de conversión de energía en la función objetivo, para garantizar la maximización de la potencia eléctrica producida por el sistema de energía generada por el oleaje. Sujeta a tener una predicción de oleaje a corto plazo suficientemente precisa, esta formulación cumple perfectamente con las expectativas en términos de rendimiento, porque se puede demostrar que la energía recuperada en varios estados del mar está siempre muy cerca del máximo alcanzable. Por otro lado, son necesarios cálculos complejos y largos para obtener la solución óptima, lo que puede dificultar o incluso imposibilitar la implementación en tiempo real en el sistema de energía generada por el oleaje, dependiendo de la potencia del ordenador de control disponible. La complejidad computacional se debe a la no convexidad de la función objetivo cuadrática, que junto con la gran cantidad de incógnitas, requiere el uso de un algoritmo de optimización no lineal a gran escala.
Para superar estos inconvenientes, la presente invención propone mejorar el funcionamiento de un sistema de energía generada por el oleaje mediante un procedimiento de control predictivo de la máquina de conversión que maximiza la energía generada teniendo en cuenta la eficiencia de las conversiones de energía y una predicción de oleaje. Además, el procedimiento según la invención determina el control óptimo minimizando una función objetivo ponderada y discretizada por el procedimiento trapezoidal. Así, el procedimiento de control según la invención permite determinar el control que maximiza la potencia media recuperada con tiempos de cálculo reducidos, porque la optimización de la función objetivo discretizada y ponderada da como resultado un problema de programación cuadrática estrictamente convexa, que es posible de resolver con algoritmos muy eficientes.
El procedimiento según la invención
La invención se refiere a un procedimiento para controlar un sistema de energía generada por el oleaje que convierte la energía del oleaje en energía eléctrica o hidráulica, comprendiendo dicho sistema de energía generada por el oleaje al menos un medio móvil que coopera con al menos una máquina de conversión de energía, y dicho medio móvil realiza un movimiento oscilatorio con respecto a dicha máquina de conversión. Para este procedimiento se realizan los siguientes pasos:
a) se construye un modelo dinámico de dicho sistema de energía generada por el oleaje que relaciona la velocidad de dichos medios móviles con dicha fuerza ejercida por el oleaje sobre dichos medios móviles y con la fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles;
b) se construye un modelo energético de dicho sistema de energía generada por el oleaje que relaciona la potencia media generada por dicha máquina de conversión con la fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles, con la velocidad de dichos medios móviles, y con la eficiencia de dicho sistema de energía generada por el oleaje;
c) se predice la fuerza ejercida por las ondas sobre dichos medios móviles durante un período de tiempo predeterminado;
d) se determina un valor de control de dicha fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles maximizando la potencia media generada por dicha máquina de conversión, implementando los siguientes pasos:
i) se determina una función objetivo representativa de la potencia generada por dicha máquina de conversión mediante dicha predicción de la fuerza ejercida por el oleaje sobre dichos medios móviles, de dicho modelo dinámico y de dicho modelo energético;
ii) dicha función objetivo se discretiza mediante el procedimiento trapezoidal;
iii) los valores futuros del control se ponderan en dicha función objetivo discretizada mediante coeficientes de ponderación predeterminados;
iv) dicho valor de control se deduce de dicha fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles minimizando dicha función objetivo discretizada y ponderada; y
e) dicha máquina de conversión se controla mediante dicho valor de control.
De acuerdo con una realización de la invención, dicha función objetivo J discretizada y ponderada se escribe:

con qj dichos coeficientes de ponderación, ua la fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles, y v la velocidad de dichos medios móviles, y Np número de pasos de tiempo discretos contenidos en el horizonte de predicción.
Ventajosamente, dicha función objetivo J discretizada y ponderada se escribe en forma de matriz del tipo:
J
=
uiHu, 2

con ue un vector de la fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles, x el vector de estado del modelo del sistema de energía generada por el oleaje con su máquina de conversión, we el vector de las predicciones de la fuerza del oleaje, H la matriz ponderación en el vector ue, f la matriz de ponderación sobre el estado actual x del modelo dinámico global del sistema de energía generada por el oleaje y el vector de las predicciones de la fuerza de las olas we.
Preferiblemente, los valores propios negativos o cero de dicha matriz de ponderación H se reemplazan por valores propios positivos predeterminados.
De acuerdo con una implementación, la fuerza ejercida por el oleaje sobre dichos medios móviles se predice mediante al menos una medida o una estimación de dicha fuerza ejercida por el oleaje sobre dichos medios móviles, en particular mediante un conjunto de sensores de presión dispuestos en el nivel del medio móvil o de los sensores de fuerza dispuestos entre dichos medios móviles y la máquina de conversión.
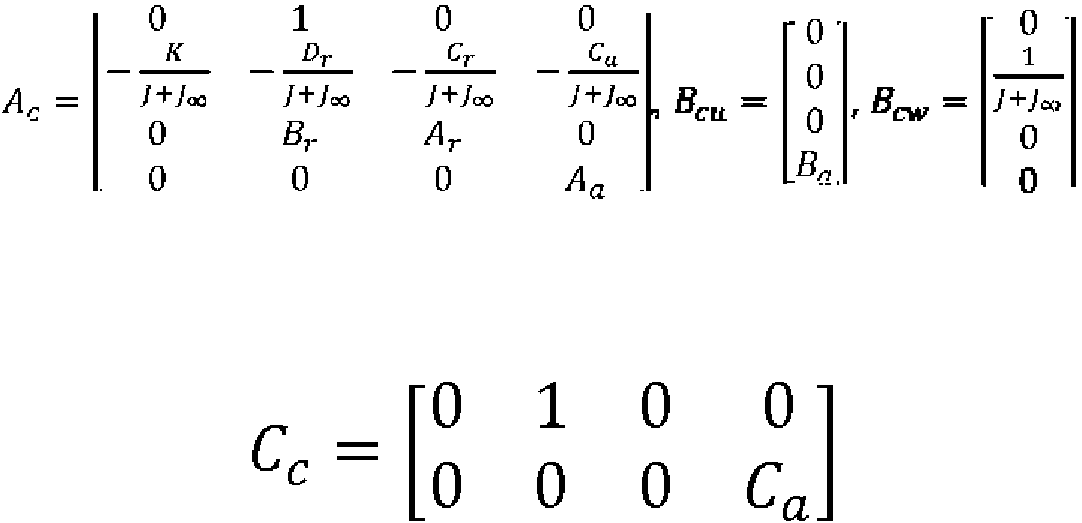
De acuerdo con una variante, dicho modelo dinámico de dicho sistema de energía generada por el oleaje se escribe en la forma:
f * ( 0 = Acx ( t) + Bcuu ( t) + Bcww ( t)
ly (0 = Ccx ( t)
con x el vector de estado de dicho sistema de energía generada por el oleaje con dicha máquina de conversión, u el control de dicha fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles, w la fuerza de excitación del oleaje incidente sobre dichos medios móviles, y Ac, Bcu, Bcw, Cc de las matrices que multiplican el estado, y las entradas de dicho modelo dinámico para permitir el cálculo de la variación dinámica del estado y las salidas de dicho modelo dinámico.
De acuerdo con una característica, dicho modelo dinámico de dicho sistema de energía generada por el oleaje integra una dinámica ideal de dicha máquina de conversión, considerando el control de dicha máquina de conversión casi instantánea con respecto a la dinámica de dicho sistema de energía generada por el oleaje.
De acuerdo con una opción de implementación, dicho modelo energético se escribe mediante una fórmula del tipo:
= - 7 ¿ o ^ vdf
siendo Pa la potencia media generada, t el tiempo, T una duración predeterminada, q la eficiencia de la conversión de energía, u la fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles y v la velocidad de dichos medios móviles con respecto a dicha máquina de conversión.
Preferiblemente, dicha eficiencia q es función de la fuerza ua ejercida por la máquina de conversión sobre dichos medios móviles y de la velocidad v del medio móvil con respecto a dicha máquina de conversión.
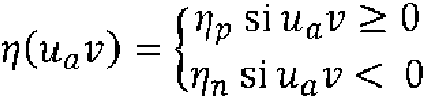
Ventajosamente, dicha eficiencia q se calcula mediante una fórmula del tipo:

con np la eficiencia del motor de dicha máquina de conversión, qn la eficiencia del generador de dicha máquina de conversión, con 0 < qp < 1 y qn s 1.
De acuerdo con una realización, dicho procedimiento comprende un paso previo de optimización de dichos coeficientes de ponderación mediante un algoritmo genético, o mediante optimización mediante enjambres de partículas, o mediante búsqueda por vecindad variable o mediante el método de Nelder-Mead.
De acuerdo con una implementación, los pasos c), d) y e) se reiteran para el control predictivo en un horizonte deslizante.
Preferiblemente, dicha máquina de conversión de energía es una máquina eléctrica o hidráulica.
Breve presentación de las figuras
Otras características y ventajas del procedimiento según la invención aparecerán al leer la siguiente descripción de ejemplos no limitativos de realizaciones, con referencia a las figuras adjuntas y descritas a continuación.
La figura 1 ilustra las etapas del procedimiento según la invención.
La figura 2 ilustra el modelo dinámico según una realización de la invención.
La figura 3 ilustra un ejemplo de un sistema de energía generada por el oleaje.
La figura 4a ilustra una discretización de una función según el procedimiento de los rectángulos.
La figura 4b ilustra una discretización de la misma función según el procedimiento trapezoidal.
La figura 5 ilustra, para un primer ejemplo, una curva de la potencia generada por un sistema de energía generada por el oleaje obtenida mediante un procedimiento de control según la técnica anterior y mediante el procedimiento de control según una realización de la invención.
La figura 6 ilustra, para el primer ejemplo, una curva de potencia instantánea mediante un sistema de energía generada por el oleaje obtenida mediante un procedimiento de control según la técnica anterior, y mediante el procedimiento de control según una realización de la invención.
La figura 7 ilustra, para el primer ejemplo, una curva de control para un sistema de energía generada por el oleaje obtenida mediante un procedimiento de control según la técnica anterior, y mediante el procedimiento de control según una realización de la invención.
La figura 8 ilustra, para el primer ejemplo, una curva de la velocidad del medio móvil de un sistema de energía generada por el oleaje obtenida por un procedimiento de control según la técnica anterior, y por el procedimiento de control según una realización de la invención.
La figura 9 ilustra, para el primer ejemplo, la densidad espectral del oleaje.
La figura 10 ilustra, para un segundo ejemplo, una curva de la energía generada por un sistema de energía obtenida por el oleaje por un procedimiento de control según la técnica anterior y por el procedimiento de control según una realización de la invención.
Descripción detallada de la invención
La invención se refiere a un procedimiento para controlar un sistema de energía generada por el oleaje que comprende al menos un medio móvil (por ejemplo un flotador) que coopera con al menos una máquina de conversión de energía (también llamada PTO del inglés Power Take-Off). El medio móvil realiza un movimiento oscilatorio con respecto a la máquina de conversión, bajo la acción de las olas (u oleaje) y de la máquina de conversión. La máquina de conversión convierte la energía mecánica del movimiento del medio móvil en energía eléctrica. Para ello, la máquina de conversión puede ser una máquina eléctrica o una máquina hidráulica. La máquina de conversión puede considerarse como el actuador mediante el cual el sistema de control controla el funcionamiento del sistema de energía generada por el oleaje.
Notaciones
Durante la descripción, se utilizan las siguientes notaciones:
• ua: fuerza ejercida por la máquina de conversión sobre el medio móvil, también denominada Fu y:
■ u valor del control de fuerza solicitado desde la máquina de conversión en el dispositivo móvil por el sistema de control del sistema de energía generada por el oleaje (que implementa el procedimiento de control según la invención)
• w: fuerza ejercida por las ondas sobre los medios en movimiento (también denominada Fex).
• z: posición del medio móvil con respecto a su punto de equilibrio.
• v: velocidad de los medios en movimiento, también indicada z
• z: aceleración del medio móvil
• M: masa del medio móvil.
• Fhyd: fuerza restauradora hidrostática.
• K: coeficiente de rigidez hidrostática.
• Frad: fuerza de radiación.
• Fr: respuesta al impulso de la fuerza de radiación.
• M~: masa añadida a una frecuencia infinitamente alta,
• xa: vector de estado del modelo de la máquina de conversión del sistema de energía generada por el oleaje.
• Aa, Ba, Ca, Da: matrices de la representación de estado del modelo lineal de la máquina de conversión del sistema de energía generada por el oleaje que se integra en el modelo dinámico global para el control. • xr: estado interno de la representación del estado de la respuesta al impulso de la respuesta al impulso del componente de la fuerza de radiación debido a la velocidad del flotador.
• Ar, Br, Cr, Dr: matrices de la representación del estado de la respuesta al impulso de la componente de la fuerza de radiación debido a la velocidad del flotador.
• x: vector de estado del modelo del sistema de energía generada por el oleaje con su máquina de conversión
• y: vector de las salidas del modelo dinámico global del sistema de energía generada por el oleaje con su máquina de conversión, que son: la velocidad del flotador z y la fuerza aplicada por la máquina de conversión al sistema de energía generada por el oleaje u_a
• Ac, Bcu, Bcw, Cc: matrices de la representación del estado en tiempo continuo del modelo dinámico global del sistema de energía generada por el oleaje con su máquina de conversión. El modelo del sistema de motor de olas puede calcularse mediante un equilibrio de fuerzas utilizando coeficientes hidrostáticos calculados o identificados experimental o directamente mediante un procedimiento de identificación experimental, e incluye en particular el modelo de la fuerza de radiación. Si el modelo es lineal, se puede representar mediante estas matrices (es un formalismo). Este modelo relaciona la fuerza ejercida por la onda sobre el medio móvil w y el control de la fuerza solicitada desde la máquina de conversión u con la velocidad del medio móvil v (o z)
• A, Bu, Bw, C, Du, Dw: matrices de la representación del estado de tiempo discreto del sistema de energía generada por el oleaje que integra la máquina de conversión, obtenidas discretizando con el procedimiento de Tustin la representación de tiempo continuo para un período de muestreo dado. Esta representación de estado se utiliza para el resumen del control.
• Pa: potencia media generada por el sistema de energía generada por el oleaje.
• t: tiempo continuo
• k: tiempo discreto
• T: duración predeterminada.
• ly eficiencia de conversión de energía, con
■ qp: rendimiento del motor de la máquina de conversión, se trata de datos del fabricante o datos determinados experimentalmente.
■ tfn. eficiencia generadora de la máquina de conversión, se trata de un dato del fabricante o un dato determinado experimentalmente.
• Tp: horizonte de predicción
• Np: el número de pasos de tiempo discretos contenidos en el horizonte de predicción
• qj: coeficientes de ponderación que se aplicarán a la predicción de potencia extraída para cada j del horizonte de predicción, j = 1,2,..., Np - 2
• ue: vector de los controles de fuerza dados a la máquina de conversión para cada paso del horizonte de predicción.
• H: matriz de ponderaciones sobre el vector ue.
• we: vector de las predicciones de la fuerza del oleaje.
• f: matriz de ponderación sobre el estado actual x del modelo dinámico global del sistema de energía generada por el oleaje y el vector de las predicciones de la fuerza de las olas we
• we: vector de las predicciones de la fuerza del oleaje.
Para estas notaciones, la derivada con respecto al tiempo se indica mediante un punto por encima de la variable considerada. El tiempo se indica t (variable continua) o k (variable discreta).
En el resto de la descripción y para las reivindicaciones, los términos olas, olas del mar y oleajes se consideran equivalentes.
La invención se refiere a un procedimiento para controlar un sistema de energía generada por el oleaje. La figura 1 representa los diferentes pasos del procedimiento según la invención:
1. Construcción de un modelo dinámico (MOD DYN)
2. Construcción de un modelo energético (MOD ENE)
3. Predicción de la fuerza de las olas (PRED)
4. Estimación del estado del sistema (ESTADO)
5. Determinación del valor de control (VAL)
6. Control de la máquina de conversión (COM)
Los pasos 1 y 2 son pasos que se pueden realizar de antemano. Forman parte de un procedimiento de calibración cuando se configura la máquina. Los pasos 3 a 6 se realizan en tiempo real, en un bucle de tiempo real (BTR). De acuerdo con una realización alternativa, el procedimiento puede incluir un paso opcional adicional, que consiste en determinar coeficientes de ponderación. Este paso se puede realizar fuera de línea siguiendo los pasos 1 y 2 y usando los pasos 4 a 6. Este paso opcional se describirá con más detalle en la descripción del paso de ponderación numerado 5) iii.
Ventajosamente, el procedimiento de control según la invención puede implementarse por medios informáticos, por ejemplo un ordenador.
Paso 1) Construcción de un modelo dinámico (MOD DYN)
Durante este paso, construimos un modelo dinámico del sistema de energía generada por el oleaje. El modelo dinámico representa el comportamiento dinámico, reflejando el movimiento de los elementos que constituyen el sistema de energía generada por el oleaje bajo la acción de las olas y bajo la acción del control de fuerza dado a la máquina de conversión. El modelo dinámico es un modelo que relaciona la velocidad del medio móvil con la fuerza ejercida por las ondas sobre el medio móvil al control de fuerza dado a la máquina de conversión que a su vez se traduce en una fuerza ejercida por dicha máquina de conversión sobre el medio móvil.
De acuerdo con una realización de la invención, el modelo dinámico se puede obtener aplicando el principio fundamental de dinámica al medio móvil del sistema de energía generada por el oleaje. Para esta aplicación, se tienen en cuenta en particular la fuerza ejercida por el oleaje sobre el medio móvil y la fuerza ejercida por la máquina de conversión sobre el medio móvil.
La figura 2 ilustra, en forma esquemática y no limitativa, la construcción del modelo dinámico según un modo de realización de la invención. A la entrada del modelo, tenemos el control de fuerza solicitado a la máquina de conversión u(t), que se convierte, en la fuerza que ejerce la máquina de conversión sobre el medio móvil ua(t), mediante el actuador ACT. El actuador ACT no es otro que la máquina de conversión, aumentada por su propio sistema de control, lo que permite entregar el control de fuerza solicitado u(t). La fuerza entregada al medio móvil por
la máquina de conversión ua(t) y la fuerza w(t) ejercida por el oleaje sobre el medio móvil entran entonces en la parte del modelo que corresponde a la dinámica del medio móvil (MOD DYN), su funcionamiento mecánico e hidrodinámico. Allí se encuentra en particular la masa equivalente del medio móvil (MEQ), el amortiguamiento debido a la fuerza de radiación (RAD) y un término de retorno hidrostático (HYD). Utilizando integradores (I), este modelo permite calcular la posición relativa z (t) y la velocidad del medio móvil z(t).
De acuerdo con una implementación de la invención, el actuador puede considerarse ideal, es decir, capaz de traducir instantáneamente u(t) en ua(t), o ua(t) = u(t). Se trata de una aproximación que se justifica cuando el actuador tiene una dinámica mucho más rápida que la del dispositivo móvil.
De acuerdo con una implementación de la invención, se puede considerar un sistema de energía generada por el oleaje con una parte flotante (medios móviles) cuyo movimiento de traslación o rotación oscilante está restringido en una sola dimensión. Entonces se puede suponer que el movimiento de traslación o rotación puede describirse mediante un modelo lineal en forma de estado que incluye la dinámica del flotador con su interacción con el oleaje y la dinámica del sistema de toma de fuerza (PTO), o máquina de conversión, que es el actuador del sistema.
En el resto de la descripción, solo se considera un movimiento unidireccional para el modelo dinámico. Sin embargo, el modelo dinámico se puede desarrollar para movimientos multidireccionales.
La parte de este modelo que concierne a la dinámica del flotador (medios de movimiento) con su interacción con el oleaje se puede obtener de forma estándar aplicando la teoría lineal de las olas (del principio fundamental de la dinámica):
M2(t) = Fex(t) ■+ Fhfí(t)~ Fra i(t) ■ Fu{t)
donde M es la masa total del medio móvil y de todas las partes de la máquina integrales con el flotador, z su aceleración (siendo z su posición, calculada como la desviación del punto de equilibrio, y z, su velocidad), Fex la fuerza de excitación de la onda incidente, incluidos también los efectos de la difracción, Fu la fuerza ejercida por la PTO, Fhd la fuerza de restauración hidrostática y Frad la fuerza de radiación.
Para un flotador cuyo movimiento principal es el paso, la masa puede ser reemplazada por el momento de inercia, la aceleración por la aceleración angular 0' y las fuerzas por los momentos de fuerza (o pares) Mex, Mhd, Mrad y Mu, ya sea:

A continuación, escribimos el modelo dinámico del sistema de energía generada por el oleaje de la siguiente manera
M 2 ( t ) = Fhd( t ) F r a d ( t ) + w ( t ) - Ua ( t )
donde w(t) = Fex(t), la fuerza de excitación de la onda incidente, y ua(t) = Fu(t), la fuerza ejercida por la PTO sobre el flotador, son las dos entradas al sistema. El primero se sufre, mientras que el segundo permite controlar el sistema. Consideramos ua como el resultado a su vez de un sistema dinámico que conecta la fuerza realmente ejercida por la PTO con u(t), el control de la fuerza solicitada desde la PTO (máquina de conversión). Este sistema se puede escribir como una representación del estado:

De esta manera, con Da = 0, se puede tener en cuenta en el modelo de control la dinámica del actuador del sistema de energía generada por el oleaje, que puede no ser despreciable (es decir, que puede no ser lo suficientemente rápida como para ser descuidada) en relación con la dinámica específica del sistema de energía generada por el oleaje. Y con Aa = 0, Ba = 0, Ca = 0, Da = 1, ua(t) = u(t),podemos tratar el caso del actuador perfecto, con una dinámica insignificante (en comparación con la dinámica específica de la potencia del sistema de energía generada por el oleaje).
La fuerza de restauración hidrostática se puede considerar como una función lineal de z(t):

donde K es el coeficiente de rigidez hidrostática.
Entonces, todavía de acuerdo con la teoría de ondas lineales, la fuerza de radiación se puede calcular mediante una ecuación de la forma:

donde es la masa añadida a una frecuencia infinitamente alta y

es la respuesta al impulso de la componente de la fuerza de radiación debida a la velocidad del flotador, que puede aproximarse numéricamente por el procedimiento de elementos de contorno (BEM) o analíticamente para geometrías particulares (muy simple) del flotador. Podemos considerar la ecuación anterior como un sistema lineal con Fr(t) en la salida y z ( t) en la entrada. En el dominio de la frecuencia (de Laplace), con el procedimiento de Prony, obtenemos:

donde Wr(s) es una función de transferencia, y Fr(s),Wr(s) y z(s) son las transformadas de Laplace de Fr(t),h(t) y z(t), respectivamente. Esta ecuación en el dominio de Laplace se puede poner en una forma de estado equivalente, por ejemplo:

donde Xr es un estado interno que no tiene un significado físico particular y (Ar,Br,Cr,Dr) son las matrices de realización del estado.
Definiendo
( * l ( 0 = z ( t )
U 2 ( t ) = z ( t )
podemos escribir el modelo global (es decir, incluyendo la dinámica del flotador y la del actuador), como sigue:

Volviendo a la ecuación inicial (aplicación de la teoría de ondas lineales al flotador), la dinámica del sistema de energía generada por el oleaje puede expresarse en forma de representación de estado de la siguiente manera.
f x ( t ) = A cx ( t ) Bcuu ( t ) Bcww ( t )
l y ( 0 = ccx ( t )
donde

y
Por simplicidad, solo podemos centrarnos en la velocidad del flotador. Por tanto, la posición no aparece entre las salidas de la representación estatal. Sin embargo, otros modelos dinámicos que tienen en cuenta la posición se pueden aplicar al procedimiento de control según la invención.
Paso 2) Construcción de un modelo energético (MOD ENE)
Durante este paso, se construye un modelo energético del sistema de energía generada por el oleaje. El modelo energético representa el balance energético entre la energía generada por la máquina de conversión (es decir, la energía suministrada a la red) y la energía de las olas. De acuerdo con la invención, este modelo tiene en cuenta la eficiencia imperfecta de conversión de energía mecánica en energía eléctrica o hidráulica, así como la eficiencia imperfecta de conversión de energía eléctrica o hidráulica en energía mecánica. El modelo energético relaciona la potencia media generada por la máquina de conversión con la fuerza ejercida por la máquina de conversión sobre el medio móvil, con la velocidad del medio móvil y con la eficiencia de los convertidores de energía.
De acuerdo con una realización de la invención, el modelo energético del sistema de energía generada por el oleaje se puede determinar a partir de la potencia media que genera la máquina de conversión PTO durante un período T,
Pa - ~ C _ nriua(t)v(t)dt.
que se puede calcular con una fórmula del tipo: 7 Si el propósito del sistema de energía generada por el oleaje es generar energía eléctrica, esta es la energía eléctrica promedio generada. La definición anterior de la potencia media generada es tal que la potencia media tiene un signo negativo si la energía se extrae del sistema (energía generada) y, por ejemplo, se suministra a la red eléctrica. Maximizar la potencia media generada corresponde por tanto a minimizar esta potencia.
De acuerdo con la invención, la función q se usa para modelar una eficiencia imperfecta de la cadena de conversión de energía. En este caso, la cantidad de energía generada en el modo motor disminuye y aumenta el costo de la energía suministrada al sistema (para hacer que resuene con las ondas con el modo motor). Un modelo simple que (r]v s iuav > 0
^ uav) = L s iu v < 0 utiliza la hipótesis se puede escribir de acuerdo con una ecuación del tipo: ^ in ^ í l í a í/ "■ donde las eficiencias del motor y del generador satisfacen las siguientes desigualdades 0 < qp < 1 et qn s 1. Estas eficiencias dependen de la máquina de conversión del sistema de energía generada por el oleaje e incluso pueden ser una función de UaV.
Paso 3) Predicción de la fuerza ejercida por las olas (PRED)
Para este paso, la fuerza ejercida por las ondas sobre el medio móvil se predice en tiempo real para un período futuro de una duración predeterminada T. Esta duración predeterminada T puede ser breve, por ejemplo, de una duración de 5 a 10 segundos. Luego se elige un procedimiento de predicción y se lo aplica al momento considerado. De acuerdo con una realización, los valores futuros de la fuerza ejercida sobre el medio móvil por el oleaje pueden extrapolarse utilizando, por ejemplo, un modelo autorregresivo identificado online, por ejemplo, como se describe en la solicitud de patente cuyo número de depósito es FR 15/60260.
De acuerdo con una alternativa, la fuerza ejercida por las ondas sobre el medio móvil se predice utilizando un conjunto de sensores dispuestos aguas arriba del dispositivo. Estos sensores pueden medir la elevación y la frecuencia de las olas, entre otras cosas, que se pueden utilizar para reconstruir la fuerza de las olas aguas abajo. La fuerza ejercida por las olas sobre el medio móvil no se puede medir directamente en tiempo real durante el funcionamiento normal del sistema de energía generada por el oleaje, debe inferirse o estimarse a partir de los sensores disponibles en el sistema de energía generada por el oleaje o los sensores colocados aguas arriba del sistema de energía generada por el oleaje. De acuerdo con una alternativa, se utiliza un conjunto de sensores dispuestos aguas arriba del dispositivo, que pueden medir en particular la elevación y la frecuencia de las olas, para
reconstruir la fuerza de las olas sobre el dispositivo aguas abajo y al mismo tiempo proporcionar una predicción a corto plazo. De acuerdo con una realización de la invención, una posibilidad es estimar en tiempo real la fuerza ejercida sobre el medio móvil por el oleaje con, por ejemplo, un conjunto de sensores de presión dispuestos al nivel del medio móvil o de los sensores de fuerza entre el medio móvil y máquina de conversión o sensores de elevación de oleaje.
Como variante, se puede estimar en tiempo real la fuerza ejercida por las ondas sobre el medio móvil mediante la implementación de un procedimiento para determinar la fuerza de excitación ejercida por el oleaje incidente sobre un medio móvil de un sistema de energía generada por el oleaje mediante un modelo de la fuerza de radiación, como se describe en la solicitud de patente cuyo número de registro es FR 16/53109.
Paso 4) Estimación del estado del sistema (ESTADO)
Durante este paso, el estado actual del sistema de energía generada por el oleaje se determina en tiempo real. Para este paso, el estado actual se puede estimar utilizando un observador del estado del sistema. Este observador de estado se puede producir mediante la síntesis de un filtro de Kalman a partir del modelo dinámico del sistema de energía generada por el oleaje. Por ejemplo, el observador se construye a partir de los modelos lineales expuestos en el paso 1.
Además, el observador puede tener en cuenta el control actual de la máquina de conversión para determinar el estado actual del sistema de energía generada por el oleaje, por ejemplo, mediante el control en los instantes anteriores al instante considerado.
Paso 5) Determinación del valor nominal (VAL)
Durante este paso, se determina en tiempo real un valor de control de la fuerza ejercida por la máquina de conversión sobre el medio móvil, el valor de control maximiza la potencia media generada por la máquina de conversión. Para ello, la determinación se realiza mediante la predicción de la fuerza ejercida por las olas (Paso 3), el modelo dinámico (Paso 1) y el modelo energético (Paso 2). Además, esta determinación se puede implementar teniendo en cuenta el estado del sistema (Paso 4).
El uso de la predicción de la fuerza ejercida por el oleaje proporciona la característica predictiva del procedimiento de control según la invención. El uso de un modelo energético que tiene en cuenta la eficiencia de las conversiones de energía asegura que se tengan en cuenta las pérdidas de energía, lo que permite un control óptimo que maximiza la potencia media generada por la máquina de conversión.
De hecho, si la eficiencia n es diferente de 1, el producto entre el control u y la velocidad óptima v cambia significativamente debido al costo de la energía suministrada a la máquina, vinculado en particular a las pérdidas de energía.
Con las formulaciones de los modelos dinámicos y energéticos, la búsqueda del control óptimo con restricciones sobre el control u y sobre el estado del sistema x se puede formular de forma general: minua Pa en función de los modelos y de las siguientes restricciones: umin < u < Umaxet xmin < x < Xmax.
De acuerdo con la invención, se determina un valor de control de dicha fuerza ejercida por dicha máquina de conversión sobre dichos medios móviles, maximizando la potencia media generada por dicha máquina de conversión, mediante la implementación de los siguientes pasos:
i) se determina una función objetivo representativa de la potencia generada por la máquina de conversión mediante la predicción de la fuerza ejercida por el oleaje sobre el medio móvil, el modelo dinámico y el modelo energético; ii) la función objetivo se discretiza mediante el procedimiento trapezoidal;
iii) los valores futuros de la potencia instantánea generada se ponderan en la función objetivo mediante coeficientes de ponderación;
iv) el valor de control se deduce de la fuerza ejercida por la máquina de conversión sobre el medio móvil minimizando la función objetivo discretizada y ponderada.
i) Determinación de la función objetivo
Durante este paso, se determina una función objetivo representativa de la potencia generada por la máquina de conversión. Entonces se minimizará la función objetivo (paso iv), para maximizar la potencia recuperada por el sistema de energía generada por el oleaje. La función objetivo se determina aplicando el modelo energético y el modelo dinámico a la predicción de la fuerza ejercida por el oleaje.
Más precisamente, la minimización de la función objetivo que se busca resolver en el tiempo t, con el horizonte de predicción Tp, se puede formular de la siguiente manera:
r t+ T p
m in -r ¡ua(t)v (t)d t
u h

siendo obtenido ua(t) por el modelo dinámico mediante la predicción de la fuerza del oleaje.
Se puede notar que se cambia el signo en la integral para poder plantear un problema de minimización equivalente. ii) Discretización de la función objetivo
Durante este paso, se discretiza la función objetivo, para poder resolver fácilmente el problema de minimización. De acuerdo con la invención, esta discretización se realiza mediante el procedimiento trapezoidal. El procedimiento trapezoidal es un procedimiento para el cálculo numérico de una integral basado en la interpolación lineal por intervalos. El principio consiste en asimilar la región bajo la curva representativa de una función a un trapezoide y calcular su área. El procedimiento trapezoidal permite una mejor aproximación de la función objetivo (más precisa) que el procedimiento de rectángulos utilizado en la técnica anterior. Esta mejor precisión se ilustra en las Figuras 4a y 4b. La figura 4a ilustra, en un cuadro (x, y) la aproximación de una curva C por el procedimiento del rectángulo R. La figura 4b ilustra, en un cuadro (x, y), la aproximación de una curva C por el procedimiento trapezoidal T. Se observa en estas figuras que la curva C se aproxima con mayor precisión por los trapezoides que por los rectángulos.
El procedimiento trapezoidal se aplica para hacer que el control ua aparezca por segunda vez en la función objetivo, sumando al término dado por el control en el momento k j multiplicado por la velocidad en el momento k j, un nuevo término dado por el control en el tiempo k j multiplicado por la velocidad en el tiempo k j 1. Este término adicional hace posible que la función objetivo sea convexa.
De acuerdo con una realización de la invención, el modelo continuo del sistema de energía generada por el oleaje que se escribe:
íx(t) = Acx{t) Bcuu ( t ) Bcww (t)
|y ( t) = Ccx ( t )
Este modelo se puede discretizar con el procedimiento de Tustin con un período de muestreo determinado: donde A, B, Bu, Bw, C, Du y Dw son las matrices resultantes de la discretización del sistema de tiempo continuo. En cuanto al criterio integral a minimizar, en los procedimientos propuestos hasta ahora para los sistemas de energía generada por el oleaje, la discretización se realizó mediante el procedimiento de los rectángulos, lo que da:
N p - Í
min ) - r j (k j \k )u a(,k j \k )v (k j\k )
u (k \k .) ,u (k .+ \\k )J...,u(k.+Nv - í fe) ¿i— i
v * 1 J y=o
tal que
fwrnín — nffc 4" j \ k j < 71jn¡nf j 0,1, ... , Np 1
{“'"mira — X(JC A- j \ k j < xmín> i = 1> ■■■ > ~ 1
donde NP es el número de pasos de tiempo discretos contenidos en el horizonte de predicción (tal que Tp = Nph, donde h es el período de muestreo), donde u(k + j|k), ua(k + j|k), v(k + j|k) et q(k + j|k) representan, respectivamente, el control predicho, la salida de la máquina de conversión predicha, la velocidad de flotación predicha y la eficiencia predicha en el momento k j a partir de la información disponible en el momento k. Este enfoque de discretización es el seguido para la estrategia de control descrita por la solicitud de patente FR 3019235 (Wo 2015/150102). También se encuentra en la técnica anterior para el caso más simple y menos realista n = 1 (y sin dinámica de actuador). La función objetivo resultante no es convexa, incluso para n=1, lo que hace que el problema de optimización sea difícil de resolver en línea de manera eficiente. En el caso de q=1 y ua(t) = u(t), se podría considerar una convexificación de la función de objeto propuesta basada en la adición de una penalización en el control. Sin embargo, podemos demostrar que esta modificación conduce a una solución en gran medida subóptima, con una pérdida significativa de energía recuperada, incluso para el caso más simple considerado (véase la figura 9 que se describirá con más detalle al final de la descripción).
De acuerdo con una realización de la invención, se supone que la tasa de variación de v(t) es mucho mayor que la de ua(t). Esto es razonable, porque ua(t) es la salida de un sistema dinámico cuya entrada u(t) se mantiene constante entre cada período de muestreo.
Aplicando ventajosamente el procedimiento trapezoidal, la función objetivo discretizada y a minimizar se puede escribir:
Np- 2
min Y - t j ( k j \ k ) u a(k j \ k X v ( k i \ k ) v ( k j ^ l \ k ) )
lí(ÍC|fc1,Ii(Í£ l|ft),...,u(fc+Wp-l|k) i—i
tal que
(umm 0,1, ... , Np — 1
{-Anín 1. ■■■ , Np — 1
1. ■■■ , Np — 1
Nótese que el uso del procedimiento trapezoide permite mostrar en la función objetivo la media entre dos valores sucesivos (en los pasos k j y no k j 1) de la velocidad v y, por lo tanto, de la potencia predicha extraída. El factor dos que deberíamos tener en el denominador para tomar el promedio se puede quitar de la función objetivo porque no influye en la solución óptima. Es la presencia del término adicional ua(k + j\k)v(k + j + 1\k), lo que permite hacer convexa la función objetivo.
iii) Ponderación de la función objetivo
Para hacer convexo el problema de minimización, con el fin de que la determinación del control sea rápida y posible en tiempo real, se introducen pesos en la función objetivo discretizada. El objetivo es ponderar los valores futuros previstos de la potencia extraída mediante coeficientes de ponderación. Por lo tanto, para un control optimizado, se puede dar mayor importancia a las predicciones del futuro cercano (aplicando pesos relativamente pequeños) y menos importancia a las predicciones del futuro lejano (aplicando pesos relativamente grandes).
De acuerdo con una realización de la invención, al llamar qj el coeficiente de ponderación para el paso j del horizonte de predicción, podemos introducir la nueva función objetivo discretizada y ponderada:
Nv - 2
] = ^ qjua(k j \k ) (v (k j \k ) + v(k j + l\k ) )
J=o
dentro del problema del control:
min ]
u (/í|k ),u (k+ l|k )...u(f;+Wj,-l|¿£)
tal que

donde los qj < 0 (j = 1, 2,..., Np - 2) son parámetros de ajuste a elegir, permitiendo ponderar de forma diferente ua(k + j\k)(v(k j\k) v(k + j + 1 \k)), la predicción de la potencia recuperada en el tiempo k j.
En esta formulación, la eficiencia n se tiene en cuenta en los coeficientes de ponderación q0, q1,..., qNp-2.
De acuerdo con una realización, es posible elegir ponderaciones que aumentan con el tiempo, a saber: 9o - 9 i -■■■- 9np- 2
Así, las predicciones más lejanas de la energía recuperada en el futuro tendrán cada vez menos impacto en el criterio J. Esto es muy razonable, en la medida en que las predicciones de la velocidad v(k + j\k) se calculan a partir de las predicciones del fuerza del oleaje, w(k + j\k), que son cada vez menos precisos a medida que se avanza en el horizonte de predicción. De esta forma, optamos por tener menos confianza en predicciones más distantes y menos precisas, lo que es beneficioso para la robustez de la ley de control.
Además, podemos elegir la primera ponderación mucho menor que todas las demás, a saber: <?o « Qj, j = 1.2.....Np - 2.
Así, la solución óptima tiende a asegurar que ua(k\k)v(k\k) > 0 es decir que ua(k\k) y v(k\k) tengan el mismo signo. En otras palabras, la ley de control obtenida mediante esta variante de realización permite evitar el uso de potencia reactiva (extraída de la red).
Una vez que se ha introducido la nueva formulación de la función objetivo, mediante el uso de pasajes matemáticos
estándar para el control con un enfoque de control predictivo de horizonte deslizante (MPC significa “Model Predictive Control”), es posible reescribir en forma de matriz compacta como se muestra en la siguiendo.
Usando la ecuación de estado (la primera ecuación) del modelo del sistema:

podemos expresar los estados predichos x(k|k) = x(k), secuencialmente, en función del estado actual del sistema x(k|k) = x(k), del conjunto de controles predichos u(k + j|k) y el conjunto de fuerzas de excitación de onda predichas w(k + j|k), para j = 1,2,... Np-i

Que también se puede escribir en forma de matriz, de la siguiente manera:

donde

De manera similar, al usar la ecuación de salida (la primera ecuación) del modelo del sistema, obtenemos:

que podemos reescribir en forma de matriz:

donde

y

Al insertar la ecuación matricial que define Xe en la que define a ye, obtenemos:
Ye ~ CeAex(k\k) + (CeBue Due)ue (CeBwe Dwe)we o, de manera equivalente:
Ye = ®x(k\k) ¥ uue Vwwe
donde

La función objetivo

también se puede poner en forma de matriz, de la siguiente manera

donde Q es una matriz diagonal que contiene las ponderaciones
Q = d ia g ( [ í?c h ■■■ ÍJV p -2] )
y

Al usar

se tiene :
ua = Taye. vi = Tiy e. v2 = T2ye.
donde


Lo que da, reemplazando en la eXpresión por J:
I = ylTjQCT, T2jy(,
cualquier
Q=i?0CT1 t2),
Usando la eXpresión de ye, J se convierte en:

o de manera equivalente,
I = u X Q 'F ttue 2 u X Q [1 > 
El término final (®x(k\k) TwWe)rQ(Ox(k\k) TwWe) se puede eliminar de J, porque no influye en la solución óptima (no depende de ue).
El resultado es que la función objetivo se puede escribir de manera simplificada:
'x {k \k j
J' = u ^ Q T uuc 2 u ^ Q [ ® VT W 1 J
. we .
o de manera equivalente

con
H = WlQWu, f= T Í Q [® T J
Para completar la reformulación del problema de control de MPC en forma de matriz, se expresan las restricciones sobre el control
umin < u(k + j'|fc) < umin, j = 0,1.....Np - 1
en términos de restricciones sobre ue. Sea 1 un vector de 1 de longitud adecuada, el conjunto de restricciones es entonces
Itifnin
Las limitaciones del estado pueden tratarse de manera similar.
De acuerdo con una realización de la invención, la función objetivo ponderada y discretizada finalmente se puede escribir en forma de matriz:
min jUeHiie ue t 
tal que
ltímffl < U, < lU max
si uno no considera las limitaciones del estado, por simplicidad.
De acuerdo con una forma de realización de la invención, los coeficientes de ponderación qj, j = 1,2,..., Np - 2, se pueden determinar fuera de línea y antes de las etapas del procedimiento de control. En la posición del problema MPC, se asumió que los pesos q0,qi,...,qNp-2 ya habían sido elegidos. De hecho, antes de aplicar el control MPC en línea, podemos pasar por un paso de optimización fuera de línea que permite elegirlos para que la resolución en línea del problema MPC maximice la energía extraída por el sistema de energía generada por el oleaje.
En otras palabras, debemos encontrar el mejor conjunto de parámetros
q = [ ío <7i ■■■ Rn p - ¿ Y ,
es decir, que maximiza la potencia media extraída Pa
1
f T
Pa = T ¡ J? Ua(t)v ( t)d t
1 h
=o
m in {-P a}.
o, de manera equivalente: 4
Tener en cuenta que este es un problema de optimización difícil de resolver, porque la potencia Pa depende del control u(t) que, a su vez, se calcula en línea resolviendo el siguiente problema de MPC:

tal que
ltímií)
Entonces, Pa es en última instancia una función de los parámetros q¡, j = 1,2,...,Np - 2, que deben optimizarse (para maximizar Pa). Para resolver este problema de optimización, podemos utilizar algoritmos como algoritmos genéticos, optimización de enjambre de partículas, búsqueda de vecindad variable o el método de Nelder-Mead.
La potencia media Pa no es solo una función de q, sino también de las predicciones de la fuerza de la onda we. Por lo tanto, la etapa de optimización de q puede llevarse a cabo en series de tiempo de fuerzas de las olas w(t) generadas a partir de un conjunto de espectros del estado del mar que cubre las condiciones operativas esperadas del sistema de energía generada por el oleaje.
Sea m el número de estados del mar considerados, la función objetivo a optimizar es entonces

(x(k 1) = Ax(k) Buu(k)+Bww(k)
ly(/c) - Cx(k) Duu(k)+Dww(k )
con como entrada la serie temporal w (k) correspondiente al estado de la mar I, y el control u(k) calculado en lazo cerrado con la ley de control MPC

tal que

obtenido con la corriente q.
El valor inicial de q se puede elegir, por ejemplo, de la siguiente manera:

Nótese que, aunque este paso de optimización es muy exigente en términos de cálculos, se realiza fuera de línea, de una vez por todas, sin ninguna limitación de tiempo de cálculo particular.
iv) Determinación del valor del control
Durante este paso, el valor del control de la fuerza ejercida por la máquina de conversión sobre el medio móvil se determina minimizando la función objetivo discretizada y ponderada. Para esta determinación, se implementa un enfoque de control predictivo de horizonte deslizante (MPC significa “Model Predictive Control”). Así, durante este paso, se determina, en forma discretizada, ponderada y matricial, el control óptimo como:

tal que
l ^ í iu n — u e — 1 u m ax
De acuerdo con una realización basada en el principio del horizonte deslizante, la solución óptima del problema de optimización, se determina:

pero solo el primer valor de la secuencia u*(kk se aplica al sistema como un control de la fuerza de la máquina de conversión, es decir,
u(fc) =u*(k \k )
Como se ha formulado, para un conjunto dado de parámetros de ponderación qj, j = 1, 2,..., Np - 2, el problema de optimización anterior es un problema de programación cuadrática (QP).
De acuerdo con una primera implementación de la invención, si ua(t) = u(t), es decir, si la dinámica del actuador no está incluida en el modelo de diseño del MPC, el problema de optimización también es convexo y, por lo tanto, se puede resolver de manera eficiente (rápida) en línea con solucionadores QP estándar (es decir, solucionadores de
programación cuadrática). Este es un resultado importante, porque en muchos casos, la dinámica de la máquina de conversión del sistema de energía generada por el oleaje es mucho más rápida que la del sistema de energía generada por el oleaje (flotación partes móviles) y, por lo tanto, puede descuidarse. Por tanto, el procedimiento de control según la invención permite afrontar eficazmente estos escenarios, sin pasos posteriores.
De acuerdo con una segunda implementación de la invención, si no se puede descuidar la dinámica de la máquina de conversión y, por lo tanto, se incluye en el modelo para la síntesis del control MPC, el problema de optimización anterior ya no es convexo, porque no hay garantizar que la matriz de ponderación cuadrática H sea definida positiva (condición matemática suficiente para que el problema sea estrictamente convexo). Por lo tanto, se puede utilizar un paso posterior para convencerlo, con menos pérdida de optimización. Para hacer convexo el problema de optimización, podemos reemplazar los valores propios negativos o cero de la matriz de ponderación H por valores positivos, preferiblemente valores positivos muy pequeños (por ejemplo, entre 0,0001 y 0,1). Por lo tanto, el problema de optimización puede resolverse de manera eficiente mediante solucionadores de QP estándar.
De acuerdo con un ejemplo de esta implementación, el problema se convexifica mediante la descomposición de Jordán H = SAS-1
donde S es una matriz no singular y

es una matriz diagonal que contiene los valores propios de H (que son números reales, porque H es simétrico), en orden ascendente:

siendo v el número de valores propios menor o igual que cero.
Consideramos la siguiente matriz diagonal:
A m = diag([e ■■■ e Áv ... A np- i ])
donde los valores propios menores o iguales a cero de A han sido reemplazados por un número real positivo muy pequeño £ (por ejemplo, £ = 0,001).
Definamos Hm como

Dado que sus valores propios son todos estrictamente positivos, Hm es una matriz definida positiva. Si se reemplaza H por Hm en la función de costo del problema MPC, se obtiene:

tal que

Por lo tanto, el problema se vuelve estrictamente convexo. Por lo tanto, se puede resolver fácilmente con solucionadores de programación cuadráticos estándar.
La nueva matriz de ponderación cuadrática Hm es una aproximación de H y, por tanto, la solución óptima del problema modificado puede ser subóptima con respecto al problema original. Sin embargo, la pérdida de optimalidad es mucho menos importante que en el caso de una convexificación al agregar una ponderación en los controles. Como se ha dicho, el problema de control de horizonte deslizante (MPC) que se obtuvo mediante el procedimiento según la invención se puede resolver fácilmente con solucionadores de programación cuadrática QP estándar, mucho más rápido que un problema de control MPC con una función objetiva. Esto hace posible implementar el procedimiento de control en línea y en tiempo real incluso en sistemas de energía generada por el oleaje rápidamente dinámico.
Paso 6) Pedido de la máquina de conversión
Durante este paso, la máquina de conversión se controla en función del valor determinado durante el paso anterior. Para ello, se acciona la máquina de conversión (máquina eléctrica o hidráulica) para que reproduzca el nuevo valor de la fuerza u determinada en el paso 5.
Por ejemplo, la nueva expresión del mando de la fuerza u se aplica al sistema de control de la máquina eléctrica lo que permite obtener una fuerza ua ejercida por la máquina de conversión sobre el medio móvil. El control de la máquina eléctrica para que aplique la fuerza correspondiente ua, salvo la dinámica de la máquina, al mando u solicitado, se realiza modificando la corriente eléctrica aplicada a la máquina eléctrica. Más detalladamente, para proporcionar un par o fuerza que impulsal medio móvil, se aplica una corriente proporcionando energía eléctrica. Por otro lado, para producir un par o fuerza que resista el movimiento del medio móvil, se aplica una corriente mientras se recupera una potencia eléctrica.
Ejemplo de aplicación
Un ejemplo no limitativo de un sistema de energía generada por el oleaje es una boya oscilante como se muestra en la Figura 3. Este sistema de energía generada por el oleaje comprende una boya 2 como medio móvil de masa m, una máquina de conversión 1 para amortiguar d y de elasticidad k que es fijo. La boya está sometida a un movimiento oscilatorio por las olas 3 ya fuerzas hidráulicas.
El procedimiento de control según la invención se compara con el procedimiento de control descrito en la solicitud de patente FR 2973448 (WO 2012/131186), mediante el estudio de las respuestas obtenidas por estos dos procedimientos. Este ejemplo comparativo se implementó en un sistema de energía generada por el oleaje correspondiente al diagrama de la figura 3. Las figuras 5 a 8 son curvas de los valores obtenidos por los dos procedimientos. Para este ejemplo, la densidad espectral del oleaje considerado se ajusta a la curva de la figura 9 de la amplitud A en función de la frecuencia w (rad/s). En las curvas 5 a 8, los resultados obtenidos por el procedimiento de control según la invención se indican como INV, y los resultados obtenidos por el procedimiento de control descrito en la solicitud de patente FR 2973448 (WO 2012/131186) se indican como AA.
La figura 5 ilustra la potencia Pg (Wh) generada en función del tiempo T (s). Tener en cuenta que la potencia Pg generada es sustancialmente idéntica para los dos procedimientos de control.
La figura 6 ilustra la potencia instantánea Pi (Wh) en función del tiempo T (s). Tener en cuenta que los dos procedimientos de control dan resultados similares en términos de potencia instantánea.
La figura 7 ilustra el control u de la máquina de conversión en función del tiempo T (s). Se nota una buena correspondencia de los dos controles determinados.
La figura 8 ilustra la velocidad v del medio móvil en función del tiempo T (s). También existe una buena correspondencia entre las velocidades determinadas.
Por lo tanto, el procedimiento según la invención permite un control óptimo en términos de recuperación de energía. Además, el tiempo de cálculo necesario para el procedimiento según la invención es del orden de un microsegundo en un ordenador de prototipos estándar, mientras que el tiempo de cálculo necesario para el procedimiento descrito en la solicitud de patente FR 2973448 (WO 2012/131186) es del orden de cien milisegundos para esta misma calculadora. Por tanto, el procedimiento de control según la invención es más favorable para su uso en tiempo real. Para el procedimiento de control descrito en la solicitud de patente FR 2973448 (WO 2012/131186), sería posible considerar la convexificación de la función objetivo añadiendo una penalización al control. Mediante un segundo ejemplo comparativo, también podemos mostrar que cuando intentamos convexificar la función objetivo por discretización con el procedimiento de los rectángulos, agregando la menor ponderación al control que hace que el sistema sea convexo, se recupera mucha menos energía que con convexificación por discretización con el procedimiento trapezoidal (procedimiento presentado aquí, caso ua(t) = u(t)). La figura 10 ilustra la energía E generada por el medio móvil en función del tiempo. La curva INV corresponde a la discretización con el procedimiento trapezoidal que hace que el control aparezca por segunda vez en la función objetivo en cada paso del horizonte de predicción según la invención, y la curva AA corresponde a la convexificación de la función objetivo añadiendo una pequeña ponderación en el control.
Así, el uso del procedimiento trapezoidal para la discretización, unido al uso de ponderaciones sobre los valores predichos de la potencia extraída, permite obtener un control óptimo en términos de energía generada.
Claims (13)
1. Procedimiento para controlar un sistema de energía generada por el oleaje que convierte la energía de la ola (3) en energía eléctrica o hidráulica, comprendiendo dicho sistema de energía generada por el oleaje al menos un medio móvil (2) que coopera con al menos una máquina de conversión (1) de energía, y dicho medio móvil (2) realiza un movimiento oscilatorio con respecto a dicha máquina de conversión (1), caracterizado porque se realizan las siguientes etapas:
a) se construye un modelo dinámico de dicho sistema de energía generada por el oleaje que relaciona la velocidad de dicho medio móvil (2) con dicha fuerza ejercida por el oleaje (3) sobre dicho medio móvil (2) y con la fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2);
b) se construye un modelo energético de dicho sistema de energía generada por el oleaje que relaciona la potencia media generada por dicha máquina de conversión (1) con la fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2), a la velocidad de dicho medio móvil (2) y la eficiencia de dicho sistema de energía generada por el oleaje;
c) se predice la fuerza ejercida por las olas (3) sobre dicho medio móvil (2) durante un período de tiempo predeterminado;
d) se determina un valor de control de dicha fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2) maximizando la potencia media generada por dicha máquina de conversión (1), implementando las siguientes etapas:
i) se determina una función objetivo representativa de la potencia generada por dicha máquina de conversión (1) mediante dicha predicción de la fuerza ejercida por el oleaje (3) sobre dicho medio móvil (2), de dicho modelo dinámico y de dicho modelo energético;
ii) dicha función objetivo se discretiza mediante el método trapezoidal;
iii) los valores futuros del control se ponderan en dicha función objetivo discretizada mediante coeficientes de ponderación predeterminados;
iv) dicho valor de control se deduce de dicha fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil (2) minimizando dicha función objetivo discretizada y ponderada; y
e) dicha máquina de conversión (1) se controla mediante dicho valor de control.
2. Procedimiento de acuerdo con la reivindicación 1, en el que dicha función objetivo J discretizada y ponderada se escribe:

con qj dichos coeficientes de ponderación, ua la fuerza ejercida por dicha máquina de conversión (1) sobre dicho medio móvil, y v la velocidad de dicho medio móvil (2), Np número de pasos de tiempo discretos contenidos en el horizonte de predicción.
3. Procedimiento de acuerdo con la reivindicación 2, en el que dicha función objetivo J discretizada y ponderada se escribe en forma de matriz del tipo:

con ue un vector de la fuerza ejercida por dicha máquina de conversión sobre dicho medio móvil, x el vector de estado del modelo del sistema de energía generada por el oleaje con su máquina de conversión, we el vector de las predicciones de la fuerza del oleaje, H la matriz ponderación sobre el vector ue, f la matriz de ponderación sobre el estado actual x del modelo dinámico global del sistema de energía generada por el oleaje y el vector de las predicciones de la fuerza de las olas we.
4. Procedimiento de acuerdo con la reivindicación 3, en el que los valores propios negativos o cero de dicha matriz de ponderación H se reemplazan por valores propios positivos predeterminados.
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que la fuerza ejercida por el oleaje sobre dicho medio móvil (2) se predice mediante al menos una medida o estimación de dicha fuerza ejercida por el oleaje sobre dicho medio móvil, en particular por medios de un conjunto de sensores de presión dispuestos a nivel del medio móvil o de sensores de fuerza dispuestos entre dicho medio móvil y la máquina de conversión.
6. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que dicho modelo dinámico de dicho sistema de energía generada por el oleaje se escribe en la forma:
f*(t) = Acx{t) + Bcuu(t) Bcww(t)
(y ( t ) = Ccx(t)
con x el vector de estado de dicho sistema de energía generada por el oleaje con dicha máquina de conversión, u el control de dicha fuerza ejercida por dicha máquina de conversión sobre dicho medio móvil, w la fuerza de excitación del oleaje incidente sobre dicho medio móvil, y Ac, Bcu, Bcw, Cc las matrices que multiplican el estado, y las entradas de dicho modelo dinámico para permitir el cálculo de la variación dinámica del estado y las salidas de dicho modelo dinámico.
7. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que dicho modelo dinámico de dicho sistema de energía generada por el oleaje integra una dinámica ideal de dicha máquina de conversión, considerando el control de dicha máquina de conversión casi instantáneo con respecto a la dinámica de dicho sistema de energía generada por el oleaje.
8. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que dicho modelo energético se escribe mediante una fórmula del tipo:
Pa = - - p f ' =0vuavdt
siendo Pa la potencia media generada, t el tiempo, T una duración predeterminada, n la eficiencia de la conversión de energía, u la fuerza ejercida por dicha máquina de conversión sobre dicho medio móvil y v la velocidad de dicho medio móvil con respecto a dicha máquina de conversión.
9. Procedimiento de acuerdo con la reivindicación 8, en el que dicha eficiencia n es función de la fuerza Ua ejercida por la máquina de conversión (1) sobre dicho medio móvil (2) y de la velocidad v del medio móvil (2) con respecto a dicha máquina de conversión (1).
10. Procedimiento de acuerdo con la reivindicación 9, en el que dicha eficiencia n se calcula mediante una fórmula del tipo:
con np la eficiencia del motor de dicha máquina de conversión, qn la eficiencia del generador de dicha máquina de conversión, con 0 < qp < 1 y qn s 1.
11. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que dicho procedimiento comprende una etapa preliminar de optimización de dichos coeficientes de ponderación mediante un algoritmo genético, o mediante optimización por enjambres de partículas, o mediante búsqueda por vecindad variable o mediante el método de Nelder-Mead.
12. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que se reiteran las etapas c), d) y e) para un control predictivo en un horizonte deslizante.
13. Procedimiento de acuerdo con una de las reivindicaciones anteriores, en el que dicha máquina de conversión (1) de energía es una máquina eléctrica o hidráulica.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1660872A FR3058476B1 (fr) | 2016-11-09 | 2016-11-09 | Procede de commande d'un systeme houlomoteur au moyen d'une commande obtenue par minimisation d'une fonction objectif ponderee et discretisee par la methode des trapezes |
| PCT/EP2017/077410 WO2018086894A1 (fr) | 2016-11-09 | 2017-10-26 | Procede de commande d'un systeme houlomoteur au moyen d'une commande obtenue par minimisation d'une fonction objectif ponderee et discretisee par la methode des trapezes |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| ES2855200T3 true ES2855200T3 (es) | 2021-09-23 |
Family
ID=57750264
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| ES17787933T Active ES2855200T3 (es) | 2016-11-09 | 2017-10-26 | Procedimiento de control de un sistema de energía generada por el oleaje mediante un control obtenido minimizando una función objetivo ponderada y discretizada por el procedimiento trapezoidal |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11111897B2 (es) |
| EP (1) | EP3538755B1 (es) |
| AU (1) | AU2017356592B2 (es) |
| ES (1) | ES2855200T3 (es) |
| FR (1) | FR3058476B1 (es) |
| PT (1) | PT3538755T (es) |
| WO (1) | WO2018086894A1 (es) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3049989B1 (fr) * | 2016-04-08 | 2022-08-05 | Ifp Energies Now | Procede de determination de la force d'excitation exercee par la houle incidente sur un moyen mobile d'un systeme houlomoteur au moyen d'un modele de la force de radiation |
| FR3064311B1 (fr) * | 2017-03-22 | 2019-04-12 | IFP Energies Nouvelles | Procede de commande d'un systeme houlomoteur au moyen d'une loi de commande proportionnelle integrale |
| CN113153615B (zh) * | 2021-06-10 | 2022-10-25 | 燕山大学 | 一种波浪能转换装置的控制方法及系统 |
| CN114493337B (zh) * | 2022-02-15 | 2025-12-09 | 河南中烟工业有限责任公司 | 基于改进粒子群遗传混合算法的柔性作业车间调度方法 |
| CN118472926A (zh) * | 2024-05-06 | 2024-08-09 | 曲阜师范大学 | 一种基于波浪预测的双自由度直驱式波浪发电系统控制方法 |
| CN121184289B (zh) * | 2025-11-27 | 2026-02-27 | 中国海洋大学 | 一种用于双振子波浪能转换装置的延迟补偿控制方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1563181A1 (de) | 1966-08-17 | 1970-01-15 | Frako Kondensatoren Und Appbau | Wechselrichterschaltung mit Halbleiter-Stromtoren |
| CA2726287A1 (en) * | 2002-10-30 | 2009-12-18 | Frank Louis Stromotich | High efficiency infinitely variable fluid power transformer |
| FR2876751B1 (fr) | 2004-10-15 | 2007-01-19 | Centre Nat Rech Scient Cnrse | Appareil pour convertir l'energie des vagues en energie electrique |
| FR2925129B1 (fr) | 2007-12-18 | 2013-08-16 | Leroux & Lotz Technologies | Dispositif pour convertir l'energie des vagues en une energie recuperable |
| WO2009148531A1 (en) * | 2008-05-30 | 2009-12-10 | Ocean Power Technologies, Inc. | Advanced wave energy converter control |
| FR2973448B1 (fr) | 2011-03-29 | 2013-03-29 | IFP Energies Nouvelles | Procede de controle d'un dispositif pour convertir l'energie des vagues en energie electrique |
| NO3060792T3 (es) * | 2013-10-10 | 2018-05-05 | ||
| FR3019235B1 (fr) | 2014-04-01 | 2016-03-11 | Ifp Energies Now | Procede de commande d'un systeme houlomoteur maximisant la puissance generee |
-
2016
- 2016-11-09 FR FR1660872A patent/FR3058476B1/fr not_active Expired - Fee Related
-
2017
- 2017-10-26 EP EP17787933.5A patent/EP3538755B1/fr active Active
- 2017-10-26 ES ES17787933T patent/ES2855200T3/es active Active
- 2017-10-26 US US16/348,215 patent/US11111897B2/en active Active
- 2017-10-26 WO PCT/EP2017/077410 patent/WO2018086894A1/fr not_active Ceased
- 2017-10-26 PT PT177879335T patent/PT3538755T/pt unknown
- 2017-10-26 AU AU2017356592A patent/AU2017356592B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| PT3538755T (pt) | 2021-02-04 |
| AU2017356592B2 (en) | 2022-12-01 |
| FR3058476A1 (fr) | 2018-05-11 |
| EP3538755A1 (fr) | 2019-09-18 |
| WO2018086894A1 (fr) | 2018-05-17 |
| EP3538755B1 (fr) | 2020-12-09 |
| US20190277244A1 (en) | 2019-09-12 |
| AU2017356592A1 (en) | 2019-06-06 |
| US11111897B2 (en) | 2021-09-07 |
| FR3058476B1 (fr) | 2018-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2855200T3 (es) | Procedimiento de control de un sistema de energía generada por el oleaje mediante un control obtenido minimizando una función objetivo ponderada y discretizada por el procedimiento trapezoidal | |
| ES2797961T3 (es) | Procedimiento de control de un sistema undimotriz mediante la determinación de la fuerza de excitación ejercida por el oleaje incidente sobre un medio móvil de dicho sistema | |
| Cretel et al. | An application of model predictive control to a wave energy point absorber | |
| Demircioglu et al. | Triboelectric nanogenerators for blue energy harvesting in simulated wave conditions | |
| Bacelli | Optimal control of wave energy converters | |
| ES2885748T3 (es) | Procedimiento de control de un sistema de energía undimotriz que tiene en cuenta las incertidumbres | |
| ES2878323T3 (es) | Procedimiento de control de un sistema convertidor de la energía undimotriz por medio de una ley de control integral proporcional | |
| Boren et al. | Active control of a vertical axis pendulum wave energy converter | |
| US20190128236A1 (en) | Control system and method for energy capture system | |
| AU2015239891A1 (en) | Method for controlling a wave energy converter system, maximising the power generated | |
| ES2964798T3 (es) | Procedimiento de determinación de la fuerza de excitación ejercida por el oleaje incidente sobre un medio móvil de un sistema de energía undimotriz por medio de un modelo de la fuerza de arrastre | |
| Merigaud et al. | Improving the computational performance of nonlinear pseudospectral control of wave energy converters | |
| Xia et al. | Maximum efficiency point tracking for an ocean thermal energy harvesting system | |
| Ligeikis et al. | Causal, stochastic mpc for wave energy converters | |
| Yu et al. | Research advances in energy management and harvesting technologies for autonomous profiling floats | |
| Rosati et al. | Nonlinear data-based hydrodynamic modeling of a fixed oscillating water column wave energy device | |
| Kara | Point absorber wave energy converters in regular and irregular waves with time domain analysis | |
| CN115711196A (zh) | 一种基于自增速波浪发电装置的波浪能捕获优化方法 | |
| Bracco et al. | Application of linear model predictive control to the ISWEC | |
| Abraham | Optimal control and robust estimation for ocean wave energy converters | |
| Hall et al. | The impact of control structure and constraints on the performance of a wave energy converter with a hydraulic pto system | |
| Vásquez et al. | Experimental Evaluation of Model-Based Predictive Control Applied to a Point Absorber | |
| Hall et al. | The Impact of Linear and Nonlinear Control Structures on the Performance of a Wave Energy Converter | |
| Dewhurst et al. | Wave-to-wire modeling and simulation of a wave energy converter for off-grid and micro-grid applications | |
| Guerrero Fernández | Optimal control for wave energy converters: Non-linear model predictive control approach |