ES2907706T3 - Método y dispositivo de desmultiplexado - Google Patents
Método y dispositivo de desmultiplexadoInfo
- Publication number
- ES2907706T3 ES2907706T3 ES16720843T ES16720843T ES2907706T3 ES 2907706 T3 ES2907706 T3 ES 2907706T3 ES 16720843 T ES16720843 T ES 16720843T ES 16720843 T ES16720843 T ES 16720843T ES 2907706 T3 ES2907706 T3 ES 2907706T3
- Authority
- ES
- Spain
- Prior art keywords
- signal
- different
- rtot
- demultiplexing
- sources
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 62
- 230000003595 spectral effect Effects 0.000 claims abstract description 10
- 230000000737 periodic effect Effects 0.000 claims abstract description 9
- 238000005070 sampling Methods 0.000 claims abstract description 8
- 238000004590 computer program Methods 0.000 claims description 10
- 230000001360 synchronised effect Effects 0.000 claims description 8
- 230000005540 biological transmission Effects 0.000 claims description 5
- 238000004088 simulation Methods 0.000 description 16
- 230000005855 radiation Effects 0.000 description 15
- 230000008901 benefit Effects 0.000 description 10
- 238000012360 testing method Methods 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 8
- 238000001228 spectrum Methods 0.000 description 8
- 238000004891 communication Methods 0.000 description 7
- 238000005259 measurement Methods 0.000 description 7
- 230000004044 response Effects 0.000 description 7
- 230000001934 delay Effects 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 241001061260 Emmelichthys struhsakeri Species 0.000 description 1
- 238000007476 Maximum Likelihood Methods 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000005562 fading Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/16—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using electromagnetic waves other than radio waves
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/11—Arrangements specific to free-space transmission, i.e. transmission through air or vacuum
- H04B10/114—Indoor or close-range type systems
- H04B10/116—Visible light communication
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/50—Transmitters
- H04B10/501—Structural aspects
- H04B10/502—LED transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
- G01C3/08—Use of electric radiation detectors
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optical Communication System (AREA)
Abstract
Un método para desmultiplexar una señal, rtot(t), donde dicha señal, rtot(t), es una suma de al menos dos señales secundarias r1(t), r2(t), ..., en el que cada señal secundaria comprende un patrón de repetición diferente, comprendiendo el método: - muestreo de la señal, rtot(t), durante un período de tiempo, Tobs, donde el período de tiempo, Tobs, es tal que los diferentes patrones de repetición de cada señal secundaria ocurren al menos una vez en dicho período de tiempo, y donde al menos dos señales secundarias son periódicas durante el período de tiempo, Tobs, cada una con una periodicidad diferente, siendo un múltiplo entero de una frecuencia de observación definida por f=1/Tobs o igual a la misma; - expandir periódicamente la señal muestreada, rtot(t), en serie de Fourier y obtener diferentes componentes espectrales complejas de la señal periódicamente expandida, rPtot(t).
Description
DESCRIPCIÓN
Método y dispositivo de desmultiplexado
Sector de la invención
La presente invención se refiere a un método y a un dispositivo de desmultiplexación, en particular, a un método y a un dispositivo para desmultiplexar señales, donde las señales son una suma de al menos dos señales secundarias, donde cada señal secundaria comprende una frecuencia específica diferente. En otras realizaciones, la presente invención se refiere a un método y a un dispositivo de desmultiplexación para fuentes de intensidad modulada por conmutación de la potencia, no sincronizadas.
Antecedentes de la invención
El problema del posicionamiento preciso en interiores sigue siendo un franco desafío. Para entornos de exterior, el conocido Sistema de posicionamiento global (GPS - Global Positioning System, en inglés) está proporcionando la solución. Sin embargo, en interiores, el GPS no ofrece la precisión submétrica deseada, o incluso centímétrica, debido a los efectos del desvanecimiento. Para entornos de interior, una tecnología inalámbrica precisa puede habilitar servicios basados en la ubicación (LBS - Location-Based Services, en inglés). Estos servicios son, por ejemplo, la navegación en interiores, el suministro de contenido basado en la ubicación del nodo móvil, la asignación (mapping, en inglés) de calor, la optimización de rutas, .... Se han realizado numerosos esfuerzos de investigación para determinar la ubicación en interiores de un receptor móvil basándose en señales de radiofrecuencia (RF). Con la cada vez mayor aplicación de diodos emisores de luz (LED - Light Emitting Diodes, en inglés), se puede estudiar una solución alternativa: la utilización de los LED como tecnología habilitadora para servicios basados en la ubicación en interiores. El éxito de la solución dependerá de la facilidad de integración con la infraestructura existente. Hoy en día, los LED se utilizan con fines de iluminación. Está claro que la solución para la localización en interiores no puede comprometer esta función de iluminación. Los LED, en general, no forman parte de una red de comunicación, con la consecuencia de que no existe sincronización posible entre los LED con la topología contemporánea. A menudo, los LED son atenuados mediante conmutación de la potencia, a una frecuencia que está significativamente por encima del umbral de parpadeo. Por lo tanto, la capacidad de conmutación de la potencia está disponible en la mayoría de los controladores.
El documento US 3.575.665 da a conocer un sistema de demodulación asíncrona para una señal de modulación de la posición por pulsos, que utiliza un armónico superior modulado en fase o frecuencia de una velocidad de muestreo. En el documento US 3.575.665 los armónicos más altos se utilizan para filtrar los pulsos falsos, por lo que no proporciona un método y/o dispositivo de desmultiplexación.
El documento de Liqun Li et al., “Epsilon: a visible light based positioning system” (2014-04-02), describe un sistema de posicionamiento utilizando balizas de ubicación sobre luz visible. Una pluralidad de fuentes de luz que no se comunican emiten una baliza de ubicación por medio de modulación binaria por desplazamiento de frecuencia (BFSK - Binary Frequency Shift Keying, en inglés) combinada con saltos de canal aleatorios para evitar colisiones de fuentes emisoras de luz. La latencia del sistema sigue siendo del orden de segundos, debido a la importante cantidad de información que se transmite en cada baliza.
Por lo tanto, existe la necesidad de un enfoque novedoso y de un dispositivo para la desmultiplexación.
Compendio de la invención
Un objetivo de la presente invención es dar a conocer un buen sistema y método para desmultiplexar señales.
Una ventaja de las realizaciones de la presente invención es dar a conocer un buen sistema y método para desmultiplexar señales de forma rectangular, de fuentes no sincronizadas. Más específicamente, proporciona buenos sistemas y métodos para desmultiplexar señales de fuentes de intensidad conmutada de potencia no sincronizadas.
Una ventaja de las realizaciones de la presente invención es que se puede hacer uso de transmisores no sincronizados de bajo ancho de banda, lo que lleva a una fácil implementación utilizando, por ejemplo, controladores de LED actuales de alta eficiencia.
El objetivo se consigue mediante el método y el aparato según las reivindicaciones independientes de la presente invención. Las reivindicaciones dependientes se refieren a realizaciones preferentes.
Una ventaja de las realizaciones de la presente invención es que los retardos entre las fuentes de intensidad son aleatorios, es decir, que cumplen la condición de fuentes que no se comunican. A cada fuente de intensidad se le asigna una frecuencia específica durante la instalación de la infraestructura y emite de manera continua una señal de encendido/apagado con una periodicidad correspondiente a su frecuencia asignada. La posición de cada LED con su propia frecuencia en el interior del edificio se almacena en un mapa y está disponible en el nodo móvil. El nivel de atenuación de los LED es el mismo, y conocido en el nodo receptor.
Una ventaja de las realizaciones de la presente invención es que se puede obtener una buena precisión. En algunas realizaciones, se pueden conseguir errores de posición inferiores a 10 cm, por ejemplo, inferiores a unos pocos centímetros, tal como, por ejemplo, inferiores a 5 cm. Esto último es suficiente para la mayoría de las aplicaciones. Además, cabe señalar que se puede obtener una precisión aún mayor, por ejemplo, aumentando el número de puntos de muestreo o utilizando componentes más precisos del sistema, pero normalmente también más caros, tales como, por ejemplo, el detector utilizado para detectar la señal compleja.
Una ventaja de al menos algunas realizaciones es que las fuentes de radiación utilizadas pueden transmitir tonos piloto, de manera no sincronizada, al receptor, y que no se requiere una red principal entre las fuentes de radiación. Una ventaja de al menos algunas realizaciones de la presente invención es que solo se utiliza como receptor una única detección, por ejemplo, un fotodiodo. Dichas realizaciones dan a conocer una solución al hecho de que el acceso múltiple por división del espacio (SDMA - Spatial Division Multiple Access, en inglés) no se puede aplicar cuando se utiliza un solo detector.
Una ventaja de al menos algunas realizaciones es que no se requiere un controlador de LED dedicado cuando, por ejemplo, se impone una señal analógica por encima de una señal de activación de CC. También es ventajoso que, cuando se evitan dichos controladores de LED dedicados, también se evita que la corriente del LED no se controle y que no se garantice la perspectiva de gradación de color del LED. Además, las realizaciones de la presente invención ventajosamente tienen un tiempo de instalación y un coste de instalación relativamente cortos, ya que no hay necesidad de una red principal entre las fuentes de radiación, por ejemplo, LED, para la sincronización.
Una ventaja de al menos algunas realizaciones es que se puede obtener una fácil adaptación de un sistema de posicionamiento de luz visible en aplicaciones de iluminación existentes, ya que no hay necesidad de una red troncal y las fuentes de radiación pueden enviar su información de manera asíncrona al objeto que va a ser posicionado. En un primer aspecto, la presente invención proporciona métodos para desmultiplexar una señal (r tot (t)), en el que dicho método comprende las siguientes etapas:
- recibir dicha señal (r tot (t)) que es una suma de al menos dos señales secundarias (r i (t), r 2 (t), ...), en donde cada señal secundaria comprende un patrón de repetición diferente,
- muestrear la señal (r tot (t)) durante un período de tiempo (T obs ), en donde el período de tiempo (T obs ) es tal que los diferentes patrones de repetición de cada señal secundaria ocurren al menos una vez, y en donde al menos dos señales secundarias son periódicas durante el período de tiempo (T obs ), cada una con una frecuencia diferente siendo un múltiplo entero de una frecuencia de observación f=H T obs , o igual a la misma;
- expandir periódicamente la señal muestreada (r tot (t)) en una serie de Fourier y obtener las diferentes componentes espectrales complejas de la señal periódicamente expandida (r ptot (t)).
En realizaciones preferentes, la señal (r tot (t)) es recibida en un extremo del receptor, y dicha señal comprende al menos dos señales secundarias proporcionadas por al menos dos fuentes. El método comprende, además, determinar la posición del extremo del receptor basándose en las diferentes componentes espectrales complejas obtenidas para la señal expandida periódicamente. En algunas realizaciones, dichas señales comprenden al menos tres señales secundarias proporcionadas por al menos tres fuentes. Esto último puede ser ventajoso, por ejemplo, cuando el algoritmo se realiza para la localización de la posición. Para la determinación de la posición de la rSs , por ejemplo, normalmente se requerirán al menos tres señales secundarias. Sin embargo, el algoritmo no está limitado a utilizar al menos tres señales secundarias, y la utilización de dos señales secundarias también se puede aplicar para otras aplicaciones.
En realizaciones preferentes, la señal secundaria es una señal de forma rectangular.
En otras realizaciones preferentes, las al menos dos señales secundarias son proporcionadas por al menos dos fuentes que no se comunican.
En otras realizaciones preferentes, el retardo de fase de al menos dos señales secundarias es aleatorio.
En otro aspecto, la presente invención da a conocer dispositivos desmultiplexadores adaptados para recibir una señal (r tot (t)), por lo que dicha señal (r tot (t)) es una suma de al menos dos señales secundarias ((r i (t), r 2 (t), ...), y por lo que dicho dispositivo está adaptado para desmultiplexar la señal (r tot (t)) en al menos dos señales secundarias ((r i (t), r 2 (t),...) según los métodos de las realizaciones de la presente invención. Una ventaja de las realizaciones de la presente invención es que se da a conocer un método para desmultiplexar señales conmutadas en potencia, de varias intensidades, en un receptor con una posición desconocida. El nivel de intensidad recibido de una fuente individual está relacionado con la distancia de esa fuente. Cuando se dispone de la posición estática de al menos tres fuentes, un procedimiento de minimización permite un posicionamiento preciso del receptor móvil. Sin embargo, cuando se utilizan realizaciones de la presente invención con fines de posicionamiento, se requieren al menos tres fuentes que proporcionen al menos tres señales secundarias.
La presente invención se refiere, asimismo, a un método para determinar la posición de un objeto basándose en la luz visible de diferentes fuentes de luz, comprendiendo el método detectar, en el objeto para el cual se va a determinar una posición, una señal representativa de las diferentes contribuciones de la diferentes fuentes de luz, desmultiplexar la señal utilizando un método tal como el descrito anteriormente para obtener las diferentes contribuciones de las diferentes fuentes de luz y obtener, basándose en las diferentes contribuciones determinadas de las diferentes fuentes de luz, una posición del objeto. La presente invención se refiere, además, a un sistema de determinación de la posición, para determinar la posición de un objeto basándose en la luz visible de diferentes fuentes de luz, comprendiendo el sistema un dispositivo desmultiplexador, para desmultiplexar una señal tal como se ha descrito anteriormente, y un medio de obtención de la posición, para obtener una posición basándose en las diferentes contribuciones determinadas a partir de las diferentes fuentes de luz obtenidas del dispositivo desmultiplexador.
El sistema de determinación de la posición puede comprender un controlador de fuente de luz, para controlar las diferentes fuentes de luz, cada una a una frecuencia predeterminada específica. Además, el sistema de posicionamiento puede comprender una pluralidad de diferentes fuentes de luz que son activadas por el controlador de la fuente de luz. La presente invención también se refiere a un producto de programa informático para, cuando es ejecutado en un dispositivo informático, ejecutar un método para desmultiplexar una señal (r tot (t)) tal como se describió anteriormente. Se refiere, además, a un medio portador de datos, que comprende un producto de programa informático de este tipo, y a la transmisión de un producto de programa informático a través de una red de área amplia o local.
Los aspectos particulares y preferentes de la invención se exponen en las reivindicaciones adjuntas independientes y dependientes. Las características de las reivindicaciones dependientes pueden ser combinadas con las características de las reivindicaciones independientes y con las características de otras reivindicaciones dependientes, según corresponda, y no simplemente tal como se establece explícitamente en las reivindicaciones.
Breve descripción de los dibujos
Otras características de la presente invención se harán evidentes a partir de los ejemplos y figuras, en los que: la Figura 1 ilustra una señal secundaria observada (r obs (t)) con intensidad /i durante un tiempo de observación T obs de una sola fuente de intensidad, tal como se conoce en la técnica. Obsérvese que, en este ejemplo, r obs (t) = r i (t), y, por lo tanto, s = 1. El ciclo de trabajo adimensional d (igual T/T obs ) es mayor de 0,5 en esta ilustración;
la Figura 2 ilustra un espectro de amplitud de la señal expandida de la serie de Fourier (r p (t)), donde la señal observada es igual a r i (t), tal como se conoce en el sector;
la Figura 3 ilustra una señal recibida r tot (t), que es la suma o el total de las señales secundarias recibidas de tres fuentes de intensidad (r i (t), r 2 (t), r 3 (t)), con cambios de tiempo aleatorios A1, A2 y A3 (es decir, no sincronizados) y ciclos de trabajo iguales, utilizados en realizaciones de la presente invención;
la Figura 4 ilustra un espectro de amplitud de la señal r ptot (t) (siendo la expansión de serie de Fourier de r tot (t)) que se va a desmultiplexar utilizando métodos, según realizaciones de la presente invención;
la Figura 5 ilustra una onda cuadrada que puede ser utilizada en realizaciones según la presente invención;
la Figura 6 ilustra los coeficientes espectrales de una onda cuadrada, tal como se pueden utilizar en las realizaciones de la presente invención;
la Figura 7 ilustra una señal en el receptor cuando tres LED envían información de manera asíncrona, tal como se utiliza en un ejemplo, según una realización de la presente invención;
la Figura 8 ilustra una descripción general de un enlace de VLC, tal como se utiliza en un ejemplo, según una realización de la presente invención;
la Figura 9 ilustra un banco de pruebas para la evaluación de un sistema de VLP, tal como se utiliza en un ejemplo, según una realización de la presente invención;
las Figuras 10 y 13 ilustran el valor P95 del error sobre toda la superficie para determinar la posición con diferente muestreo, diferente procesamiento de datos y diferente campo de visión, tal como se obtiene en un ejemplo, según una realización de la presente invención.
Descripción detallada de las realizaciones preferentes
La presente invención se describirá con respecto a realizaciones particulares, y haciendo referencia a ciertos dibujos, pero la invención no está limitada a ellos, sino únicamente a las reivindicaciones. Los dibujos descritos son solo esquemáticos y no limitativos. En los dibujos, el tamaño de algunos de los elementos puede estar exagerado y no estar dibujado a escala, con fines ilustrativos. Cuando se utiliza el término “que comprende” en la presente descripción y reivindicaciones, no excluye otros elementos o etapa. Cuando se utiliza un artículo definido o indefinido
cuando se hace referencia a un sustantivo singular, por ejemplo, “un” o “una”, “el” o “la”, esto incluye un plural de ese sustantivo, a menos que se indique específicamente algo más. El término “que comprende”, utilizado en las reivindicaciones, no debe ser interpretado como limitado a los medios enumerados a continuación; no excluye otros elementos o etapas. Por lo tanto, el alcance de la expresión “un dispositivo que comprende los medios A y B” no debe estar limitado a los dispositivos que consisten únicamente en los componentes A y B. Significa que, con respecto a la presente invención, los únicos componentes relevantes del dispositivo son A y B. Además, los términos primero, segundo, tercero y similares en la descripción y en las reivindicaciones, se utilizan para distinguir entre elementos similares, y no necesariamente para describir un orden secuencial o cronológico. Se debe comprender que los términos utilizados de este modo son intercambiables bajo las circunstancias apropiadas, y que las realizaciones de la invención descritas en el presente documento son capaces de funcionar en secuencias distintas a las descritas o ilustradas en el presente documento. Además, los términos arriba, abajo, encima, debajo y similares, en la descripción y en las reivindicaciones, se utilizan con fines descriptivos, y no necesariamente para describir posiciones relativas. Se debe comprender que los términos utilizados de esta manera son intercambiables bajo las circunstancias apropiadas, y que las realizaciones de la invención descritas en el presente documento son capaces de funcionar en otras orientaciones distintas de las descritas o ilustradas en el presente documento. En los dibujos, números de referencia iguales indican características similares; y, un número de referencia que aparece en más de una figura se refiere al mismo elemento. Los dibujos y las siguientes descripciones detalladas muestran realizaciones específicas de dispositivos y métodos para desmultiplexar.
El término “señal de forma rectangular” utilizado en este texto está relacionado con señales de onda, que pueden ser una forma de onda periódica no sinusoidal (que, por ejemplo, puede estar representada como una suma infinita de ondas sinusoidales), en las que la amplitud alterna, a una frecuencia constante, entre valores fijos mínimos y máximos, donde la duración de mínimo y máximo determina el ciclo de trabajo. La transición de mínimo a máximo es preferentemente instantánea, por ejemplo, para una onda cuadrada ideal. La señal de forma rectangular también se puede denominar señal de onda de bloque.
El término “no sincronizado o no sincronización”, que se utiliza en este texto, se refiere a las fuentes que proporcionan señales, denominadas señales secundarias, que están retardadas en el tiempo entre sí, por lo que el retardo no es un número predeterminado ni aleatorio.
El término “desmultiplexación” utilizado en el presente documento se refiere a la extracción de la señal recibida en el extremo del receptor en las contribuciones de señales secundarias, siendo la señal una suma de estas señales secundarias.
En un primer aspecto, la presente invención se refiere a un método para desmultiplexar una señal (r tot (t)). El método comprende recibir dicha señal (r tot (t)), que es una suma de al menos dos señales secundarias (r i (t), r 2 (t), ...). Cada señal secundaria comprende un patrón de repetición diferente. El método comprende, asimismo, el muestreo de la señal (r tot (t)) durante un período de tiempo (T obs ), por lo que el período de tiempo (T obs ) es tal que los diferentes patrones de repetición de cada señal secundaria ocurren al menos una vez, y por lo que al menos (s-1) señales secundarias son periódicas durante T obs , con una frecuencia específica diferente f s = s.(1/T obs ), por lo cual s es un entero > 1. El método comprende, además, expandir periódicamente la señal (r tot (t)) en una serie de Fourier, y obtener las diferentes componentes espectrales complejas de la señal expandida periódicamente (r pot (t)). A modo de ilustración, las realizaciones de la presente invención no están limitadas a las mismas, a continuación, se describirán con más detalle una serie de características estándar y opcionales.
El algoritmo se puede utilizar para la determinación de la posición, aunque las realizaciones de la presente invención no están limitadas a ello.
Basándose en la infraestructura de fuentes existente, por ejemplo, fuentes de luz tales como LED, y en una minimización de los costes de instalación, se prefieren las siguientes propiedades de señal en las realizaciones de la presente invención: (1) la luz emitida por cada fuente, por ejemplo, LED, se enciende/apaga a una frecuencia por encima del umbral de parpadeo, es decir, por encima de 300 Hz, por lo que la atenuación está determinada por un ciclo de trabajo, por ejemplo, entre el 10 y el 90% y (2) no hay sincronización entre las fuentes, es decir, los LED.
La Figura 1 ilustra una señal recibida, que comprende una señal secundaria, es decir, de un solo transmisor o fuente de intensidad durante un intervalo de tiempo de observación T obs , por lo que la señal es una señal de onda de bloque y s = 1. A es un desplazamiento de tiempo y depende de la instancia en que el receptor comienza a observar la señal secundaria (r i (t)), mientras que r es el tiempo de duración de la señal de alto nivel (/) dentro del intervalo de observación T obs . Cuando se expande periódicamente esta señal en una serie de Fourier, se obtiene la siguiente ecuación (con f = 1/T obs la frecuencia de observación y r p (t) la señal periódicamente expandida), téngase en cuenta que la señal en sí no es periódica:


por lo cual d es el ciclo de trabajo adimensional, y se puede escribir como r/T obs , y el retardo D normalizado adimensional se puede escribir como A/T obs . Cabe señalar que, para que sea útil para fines de comunicación, d debe ser diferente de 0 o 1 (por ejemplo, estar comprendido entre 0,1 y 0,9).
La Figura 2 ilustra el espectro de magnitud. Se puede ver, a partir de la Ec. 2, que el retardo normalizado ventajosamente no tiene impacto en el espectro de magnitud |Cn|, mientras que la intensidad I no tiene impacto en el espectro de fase 0 n.
Ejemplo: método de desmultiplexación, según la presente invención, aplicado a una señal (r tot (t)) que es una suma de tres señales secundarias de intensidad (r i (t), 2 (t) y 3 (t)), proporcionadas por tres fuentes que no se comunican.
En realizaciones específicas, para realizar una estimación precisa de la posición del extremo del receptor, deben estar dispuestas al menos tres fuentes, tres señales secundarias transmitidas. En la Figura 3, se ilustran tres fuentes y sus respectivas señales secundarias, por lo que las tres fuentes están preferentemente situadas en una posición diferente dentro de las instalaciones y, preferentemente, transmiten niveles de intensidad iguales para cada fuente. Sin embargo, en la posición el receptor, los niveles de intensidad recibidos dependen de la distancia desde esa fuente específica. Como ilustración, se puede ver que el receptor está más cerca de la fuente número 2, mientras que la distancia a las fuentes 1 y 3 es igual (I 2 > I i = I 3 ). Desafortunadamente, el receptor no observa directamente las diferentes señales emitidas, sino la suma de estas señales (indicadas como r tot (t) en la Figura 3). El objetivo de un método según al menos algunas realizaciones de la presente invención es preferentemente reconstruir, o desmultiplexar, las diferentes magnitudes y/o niveles de fase o espectros recibidos para las fuentes individuales, basándose en la observación de la señal recibida r tot (t) durante un intervalo de tiempo T obs . Una vez que se determinan estos espectros complejos individuales, existen numerosas soluciones conocidas en la técnica para determinar la posición, por ejemplo, una estimación de máxima verosimilitud o de mínimos cuadrados. Cabe señalar que durante el intervalo de tiempo de observación T obs el patrón, que es de repetición, pero no necesariamente periódico, de cada señal secundaria de cada fuente ocurre una vez, o con una periodicidad que es un múltiplo entero s de la frecuencia de observación f = 1/T obs . A partir del ejemplo de la Figura 3, se puede ver que la segunda fuente tiene una periodicidad (dentro de T obs ) que es igual a dos veces f , mientras que la tercera fuente tiene una periodicidad (dentro de T obs ) que es igual a tres veces f . Otra limitación es que las fuentes que se pueden observar simultáneamente deben tener un factor de multiplicación de frecuencia s diferente (tal como lo define la Ecuación 5).
En este ejemplo específico, el número de fuentes está limitado a tres, pero más de dos, más de tres, más de cuatro, etc., o en este ejemplo específico, tres señales secundarias recibidas se manejan perfectamente utilizando realizaciones de la presente invención, sin modificaciones adicionales, resultando en un método muy genérico y robusto. En realizaciones de la presente invención, la señal observada r tot (t), que es una suma de las señales secundarias contribuyentes, se expande periódicamente, lo que lleva a la siguiente serie de Fourier, tal como se ilustra en la siguiente ecuación (Ec. 3)):

con

y siendo s un entero positivo

Si se impone que las tres señales secundarias tengan el mismo ciclo de trabajo conocido (esto no es una limitación, pero ocurrirá a menudo) (¿3 = 82 = di), se puede escribir que:
senjnnS) j nn 2^Ds+6) (Ecuación 6) sn s (nn 8)
Hasta ahora, la única condición impuesta a la frecuencia ( f = 1/T obs ) era que estuviese preferentemente por encima del umbral de parpadeo para cumplir con la funcionalidad de iluminación. Tal como se demuestra a continuación, la determinación de los niveles de intensidad recibidos individuales se basa en los coeficientes de expansión en la serie de Fourier de la señal recibida r tot (t). En el ejemplo de la Figura 3, se ve que f i = f , f 2 = 2.f y f 3 = 3.f. Después de que la serie de Fourier expanda la señal entrante observada durante T obs , se obtienen varios coeficientes en las componentes de frecuencia discretas (n.f, siendo n entero y > 0). En CC (por lo tanto, n = 0), se tiene:
Está claro que esto no es suficiente para separar I i , I 2 y I 3 . En f , la única contribución posible puede provenir de la primera fuente:

Esto conduce inmediatamente al valor de I i :

y el valor del retardo Di aleatorio desconocido:

Estos dos valores conducen al conocimiento de todos los demás coeficientes complejos C in , basados en la relación tal como se ilustra en la ecuación 6. En la frecuencia 2.f, las únicas contribuciones posibles que se encuentran son la suma compleja del primer armónico de la segunda fuente (por lo que la frecuencia asignada f 2 es un entero de f , a saber 2.f) y el segundo armónico de la primera fuente. Puesto que se conoce cada C in , I 2 y D 2 se obtienen fácilmente por sustracción, lo que lleva al conocimiento de todos coeficientes C 2n . En 3 f finalmente, encontramos C i3 C 3 i . El mismo procedimiento conduce a la recuperación de I 3 y D 3 . La presente invención da a conocer, en las realizaciones, un método que comprende las siguientes etapas: Alas fuentes, es decir, LED, cada una de las cuales comprende una señal secundaria, se les ha asignado una frecuencia f s , que es igual a un número entero (s) multiplicado por el inverso del intervalo de tiempo de observación T obs . El receptor que quiera conocer sus coordenadas o posición en el recinto interior, toma una muestra de la señal recibida r tot (t) durante esta cantidad de tiempo T obs . Esta señal de tiempo r tot (t) se utiliza como una representación periódica de una señal r ptot (t), con diferentes componentes espectrales complejas. La determinación de los diferentes niveles de intensidad comienza desde las componentes de frecuencia más bajas hacia frecuencias más altas. Si en f , se encuentra un valor, esto significa que un LED que transmite la frecuencia más baja está dentro del espacio de observación del receptor y todos los coeficientes armónicos más altos se encuentran fácilmente utilizando las ecuaciones (9), (10) y (4). Si no se encuentra ningún valor en esa frecuencia, significa que el LED que transmite una señal secundaria con la frecuencia más baja no está presente en la señal recibida r tot (t). La siguiente frecuencia a considerar es la 2.f. La contribución del LED que transmite a esta frecuencia se determina fácilmente, ya que se conocen todos los componentes armónicos de la frecuencia de observación f . En cualquier frecuencia, el armónico de primer orden transmitido por un determinado LED se puede encontrar debido a la observación de que es la suma compleja de una incógnita (ese armónico de primer orden) y los armónicos de orden superior conocidos de los LED asignados de menor frecuencia. Basándose en este razonamiento, los niveles de intensidad I s y los retardos D s de todas las fuentes contribuyentes (es decir, señales secundarias) se pueden recuperar. Cuando las observaciones durante intervalos de tiempo T obs consecutivos se ejecutan, los métodos de la presente invención se pueden utilizar para desmultiplexar flujos de datos no sincronizados basados, por ejemplo, en la modulación de posición por pulso diferencial.
En un aspecto, la presente invención también se refiere a un dispositivo desmultiplexador para desmultiplexar una señal (r tot (t)). El dispositivo desmultiplexador según realizaciones de la presente invención está adaptado para desmultiplexar la señal en al menos dos señales secundarias ((r i (t), 2 (t), ...) utilizando un método tal como el descrito en el primer aspecto. Cabe señalar que no es necesario sincronizar las diferentes señales secundarias, que normalmente provienen de diferentes fuentes contribuyentes, por ejemplo, LED diferentes, para poder desmultiplexar la señal. Otras características del dispositivo desmultiplexador pueden ser componentes que proporcionen la funcionalidad de una o más etapas opcionales del método tal como se describió anteriormente.
En otro aspecto, la presente invención también se refiere a un método para determinar la posición de un objeto basándose en la luz visible de diferentes fuentes de luz. El método comprende detectar, sobre el objeto para el que se va a determinar una posición, una señal representativa de las diferentes contribuciones de las diferentes fuentes
de luz, desmultiplexar la señal utilizando un método tal como el descrito en el primer aspecto para obtener las diferentes contribuciones de las diferentes fuentes de radiación, y obtener, basándose en las diferentes contribuciones determinadas de las diferentes fuentes de radiación, una posición del objeto. La etapa de obtener una posición basándose en las diferentes contribuciones determinadas de las diferentes fuentes de radiación puede estar basada, por ejemplo, en la trilateración, aunque las realizaciones de la presente invención no están limitadas a ello (una alternativa se basa en la toma de huellas dactilares, en la que se pueden utilizar intensidades de señal relativas), teniendo en cuenta, por ejemplo, el envejecimiento del LED).
En otro aspecto más, la presente invención también se refiere a un sistema de determinación de la posición, para determinar la posición de un objeto basándose en la luz visible de diferentes fuentes de luz. Dicho sistema también se puede denominar sistema de posicionamiento de luz visible. El sistema de determinación de posición comprende un dispositivo desmultiplexador, para desmultiplexar una señal según un aspecto tal como se describió anteriormente. El sistema de determinación de la posición comprende, además, unos medios de obtención de la posición para obtener una posición basándose en las diferentes contribuciones determinadas de las diferentes fuentes de radiación obtenidas a partir del sistema de desmultiplexación. El dispositivo desmultiplexador y/o los medios de obtención de la posición pueden ser implementados como componentes basadas en software en un procesador. Las ventajas del sistema pueden ser las establecidas en el dispositivo desmultiplexador correspondiente o en los métodos correspondientes. A continuación, se describirán otras componentes opcionales. Cabe señalar que, según algunas realizaciones, las diferentes fuentes de luz también pueden formar parte del sistema de determinación de la posición. Alternativamente, el sistema de determinación de la posición colabora con diferentes fuentes de luz, pero las fuentes de luz no forman parte del sistema de determinación de la posición. Las diferentes fuentes de radiación proporcionan diferentes señales secundarias que muestran un patrón de repetición diferente. Una pluralidad de las señales muestran una periodicidad con una frecuencia específica diferente f s = s . (1/RT obs ), donde s es un número entero > 1. Cabe señalar que las frecuencias utilizadas para el sistema de posicionamiento de luz visual pueden ser diferentes para todas las fuentes de radiación utilizadas, pero para las realizaciones de la presente invención, es suficiente que las frecuencias utilizadas sean diferentes para aquellas fuentes de radiación que pueden contribuir a la señal utilizada para la detección. Por ejemplo, en un edificio que tiene varias plantas, las fuentes de luz situadas en diferentes niveles pueden tener la misma frecuencia, siempre que las fuentes de radiación puedan ser identificadas basándose en esa frecuencia. El sistema de determinación de la posición también puede comprender un controlador de fuente de luz, para controlar las diferentes fuentes de luz a frecuencias específicas. El sistema de determinación de la posición también puede comprender el detector utilizado para detectar la señal compleja, es decir, el detector puede formar parte de este sistema, en lugar de que el sistema solo tenga una entrada para recibir dicho sistema complejo. El detector puede ser un solo detector, tal como, por ejemplo, un fotodiodo.
En otro aspecto más, la presente invención se refiere a un producto de programa informático para, cuando es ejecutado en un dispositivo informático, ejecutar el método para desmultiplexar una señal (r tot (t)) tal como se describe en el método según los aspectos anteriores. La presente invención también se refiere a un soporte de datos legible por ordenador, que almacena un producto de programa informático, según este aspecto adicional, y a la transmisión de dicho producto de programa informático a través de una red de comunicación. Por lo tanto, la presente invención también incluye un producto de programa informático que proporciona la funcionalidad de cualquiera de las etapas de procesamiento de datos de los métodos según la presente invención, cuando es ejecutado en un dispositivo informático. El producto de programa informático también puede ser transmitido a través de una onda portadora en una red, tal como una LAN, una WAN o Internet. Los medios de transmisión pueden adoptar la forma de ondas acústicas o de luz, tales como las generadas durante las comunicaciones de datos por infrarrojos, y ondas de radio. Los medios de transmisión incluyen cables coaxiales, cables de cobre y fibra óptica, incluidos los cables que componen un bus en el interior de un ordenador.
Se debe comprender que esta invención no está limitada a las características particulares de los medios y/o las etapas del proceso de los métodos descritos, ya que dichos medios y métodos pueden variar. También se debe comprender que la terminología utilizada en el presente documento tiene el propósito de describir realizaciones particulares, solamente, y no pretende ser limitativa. Cabe señalar que, tal como se utiliza en la memoria descriptiva y en las reivindicaciones adjuntas, las formas singulares “un”, “una” “el” y “la” incluyen referentes singulares y/o plurales, a menos que el contexto indique claramente lo contrario. También se debe comprender que las formas plurales incluyen referentes singulares y/o plurales, a menos que el contexto dicte claramente lo contrario. Además, se debe comprender que, en caso de que se proporcionen rangos de parámetros que estén delimitados por valores numéricos, se considera que los rangos incluyen estos valores de limitación.
Ejemplo
A modo de ilustración, sin que las realizaciones de la presente invención estén limitadas a la misma, a continuación, se analiza una explicación teórica, así como un ejemplo práctico, de un método y sistema, según una realización de la presente invención. Cabe señalar que el ejemplo dado a conocer a continuación es solo un ejemplo de una realización de la presente invención, que ilustra una posible implementación, pero que las realizaciones de la presente invención no están limitadas a ella. Cabe señalar, además, que los símbolos utilizados en las ecuaciones proporcionadas para ilustrar el siguiente ejemplo, no necesariamente tienen el mismo significado que los símbolos utilizados en las ecuaciones mostradas cuando se describían las realizaciones detalladas indicadas anteriormente.
Por lo tanto, las ecuaciones de la descripción que siguen deben ser consideradas como un conjunto separado de ecuaciones.
En el ejemplo, se propone una técnica que utiliza ondas cuadradas y un esquema de FDMA para crear una solución en la que solo se necesita reemplazar la iluminación actual con dispositivos de iluminación inteligentes que tienen una lógica y un ancho de banda limitados. Como técnica de acceso múltiple se utilizan las propiedades de las ondas cuadradas en el dominio de la frecuencia. El receptor puede determinar su posición realizando una transformada rápida de Fourier (FFT - Fast Fourier Transform, en inglés) sobre los datos recibidos, y utilizando la información de las lámparas y un mapa descargado previamente.
Tal como se describirá a continuación, se encontró que las ondas cuadradas pueden ser aplicadas en un sistema de VLP, donde se utiliza FDMA para recuperar las señales de los diferentes LED. Debido a las propiedades de las ondas cuadradas en el dominio de la frecuencia, se realizó una solución de FDMA seleccionando una única frecuencia de base (por encima del umbral de parpadeo) para el primer LED, y donde los LED vecinos pueden adoptar una frecuencia que es un múltiplo de esta frecuencia de base elegida en una componente de frecuencia desocupada. Debido al hecho de que los LED no están sincronizados, este sistema de VLP fue fácil de implementar y, si la frecuencia de base se elige por encima del umbral de parpadeo, los requisitos de ancho de banda en el lado del transmisor se pueden mantener bajos, lo que permite utilizar un microcontrolador. Las simulaciones en toda la superficie del banco de pruebas mostraron que el error de posición aumentó debido al fotodiodo elegido con un FOV (campo de visión, Field Of View, en inglés) de 70°. Cuando se utiliza un fotodiodo con un FOV de 90°, el error de posición se reduce a unos pocos centímetros.
El sistema del presente ejemplo se diseñó tal como se describe a continuación. Las propiedades de las ondas cuadradas se explican a continuación.
El sistema de comunicación de luz visible (VLC - Visible Light Communication, en inglés) del presente ejemplo era un sistema de comunicación de modulación en intensidad - detección directa (IMDD - Intensity Modulation - Direct Detection, en inglés). Para una fácil implementación de un sistema de posicionamiento de luz visible (VLP - Visible Light Positioning, en inglés), las señales de diferentes LED deben ser recibidas simultáneamente, donde el sistema debe ser de bajo coste (sin red troncal). Cuando se utilizó el acceso múltiple por división de la frecuencia (FDMA -Frequency Division Multiple Access, en inglés) con ondas cuadradas, tal como en el presente ejemplo, este sistema se realizó fácilmente en las aplicaciones de iluminación actuales con requisitos de ancho de banda bajo para el LED. El acceso múltiple se consiguió mediante las propiedades de las ondas cuadradas en el dominio de la frecuencia. La onda cuadrada de la Figura 5 se podría representar en el dominio del tiempo por

Cuando la onda cuadrada se repitió periódicamente, los coeficientes complejos de Fourier fueron encontrados mediante

Está claro a partir de la Ecuación 12 que, para n par (y n t 0), entonces |cn| = 0. A partir de estas componentes, se encontró el espectro de potencia tal como se muestra en la Figura 6. Todas las componentes pares eran cero, lo que dejaba la posibilidad de elegir las frecuencias de los otros LED en una de las componentes pares de la frecuencia de base. Cuando los primeros LED utilizaron la frecuencia de base fü, los LED vecinos se eligieron con frecuencias 2fü, 4fü, 8f 0 , etc. La señal recibida era una superposición de todas las señales transmitidas por los LED que estaban en el campo de visión (FOV) del receptor. La Figura 7 muestra una forma de onda temporal de la señal como una superposición en el lado del receptor de tres niveles de intensidad transmitidos. El receptor realizó una FFT sobre las señales recibidas y los valores de intensidad de la señal recibida (RSS - Received Signal Strength, en inglés) para cada LED se encontraron evaluando el primer coeficiente (c1) de cada frecuencia posible. Obsérvese que cada LED simplemente transmitía la misma secuencia en su frecuencia dedicada. La información que llegaba al receptor era una intensidad en una frecuencia. La asignación de las frecuencias en una ubicación de LED con una RSS conocida condujo a la entrada necesaria del algoritmo de localización.
A continuación, se describe el posicionamiento de la luz visible. El receptor recibió la RSS de la FFT que fue utilizada por el algoritmo de posicionamiento. La RSS (PR) es una función de la respuesta del canal (H(O)) y la potencia óptica transmitida (PT) (Ecuación (13)). La respuesta del canal está determinada por el transmisor, el receptor y la habitación (figura 8). La potencia óptica del LED se emitió basándose en su respuesta espectral y siguiendo un patrón de radiación específico (Re(^)). La luz se desplaza en una ruta directa (LOS) al fotodiodo (PD - PhotoDiode,
en inglés). El PD transforma la señal óptica de nuevo en una señal eléctrica. La señal eléctrica generada depende del Área Activa (Ar), de la respuesta espectral y del ángulo de entrada de la luz (y ). El receptor puede tener una lente (concentrador óptico) (G(y )) o un filtro óptico ((y )) para limitar o ampliar las señales que se pueden recibir. Una característica importante del receptor es el FOV, que proporciona el ángulo máximo para detectar señales. Para el posicionamiento en interiores, son suficientes velocidades de datos bajas, donde la respuesta del canal se reduce a la componente LOS (H(0)) (Ecuación (14)).
Pr =PtH( 0 ) (Ecuación 13)

En las simulaciones y pruebas prácticas, se utilizó la trilateración como algoritmo de posicionamiento, donde las distancias entre los LED individuales y el receptor eran las incógnitas. La distancia se encontró a partir de la respuesta al impulso del canal (ecuación (14)), pero esto requería el conocimiento del ángulo de radiación (9) y el ángulo de incidencia (y ), que eran desconocidos en un sistema real. Para las pruebas prácticas se utilizó el LED BXRA-56C26001 y el fotodiodo BPX612 para la evaluación del sistema. El LED tenía un patrón de radiación lambertiana de primer orden Re(9), mientras que el receptor no tenía ninguna lente (G(y )) ni filtro óptico (T(y )), lo que lo convertía en un simple detector. Debido a la carcasa del fotodiodo, el FOV estaba limitado a 70°, lo que comprometía el rendimiento en ángulos de entrada grandes. Con la utilización de estas componentes, la respuesta del canal se redujo a la ecuación 15. Mediante la utilización de la geometría, la distancia d se podría encontrar mediante la ecuación (16) cuando la altura h entre el LED y el receptor era conocida y fija.

En este modelo no se tuvieron en cuenta las reflexiones. Para estas velocidades de datos bajas del sistema propuesto, la interferencia entre símbolos (ISI - Inter Symbol Interference, en inglés) no influirá en el rendimiento del sistema, puesto que el retardo del canal fue del orden de varios 10 ns. Debido a que la potencia óptica recibida fue utilizada por el algoritmo de posicionamiento, esto podría influir en el error de posición. Los resultados mostraron que la potencia reflejada depende del tamaño de la habitación y de los materiales, donde la influencia estaba limitada para habitaciones de tamaño normal (mayores de 3 por 3 por 2,5 m). Solo en las paredes de la habitación, la relación entre la potencia de la componente LOS y la reflexión se redujo y podría introducir errores en el algoritmo de posición.
Se evaluó el sistema de posicionamiento.
La primera evaluación se realizó utilizando un banco de pruebas.
Para la evaluación experimental de las simulaciones se desarrolló un banco de pruebas en ambiente de laboratorio, cuyos parámetros se pueden encontrar en la Tabla I. El banco de pruebas es una mesa de 3 por 3 metros, donde
Tabla 1: Parámetros del banco de pruebas
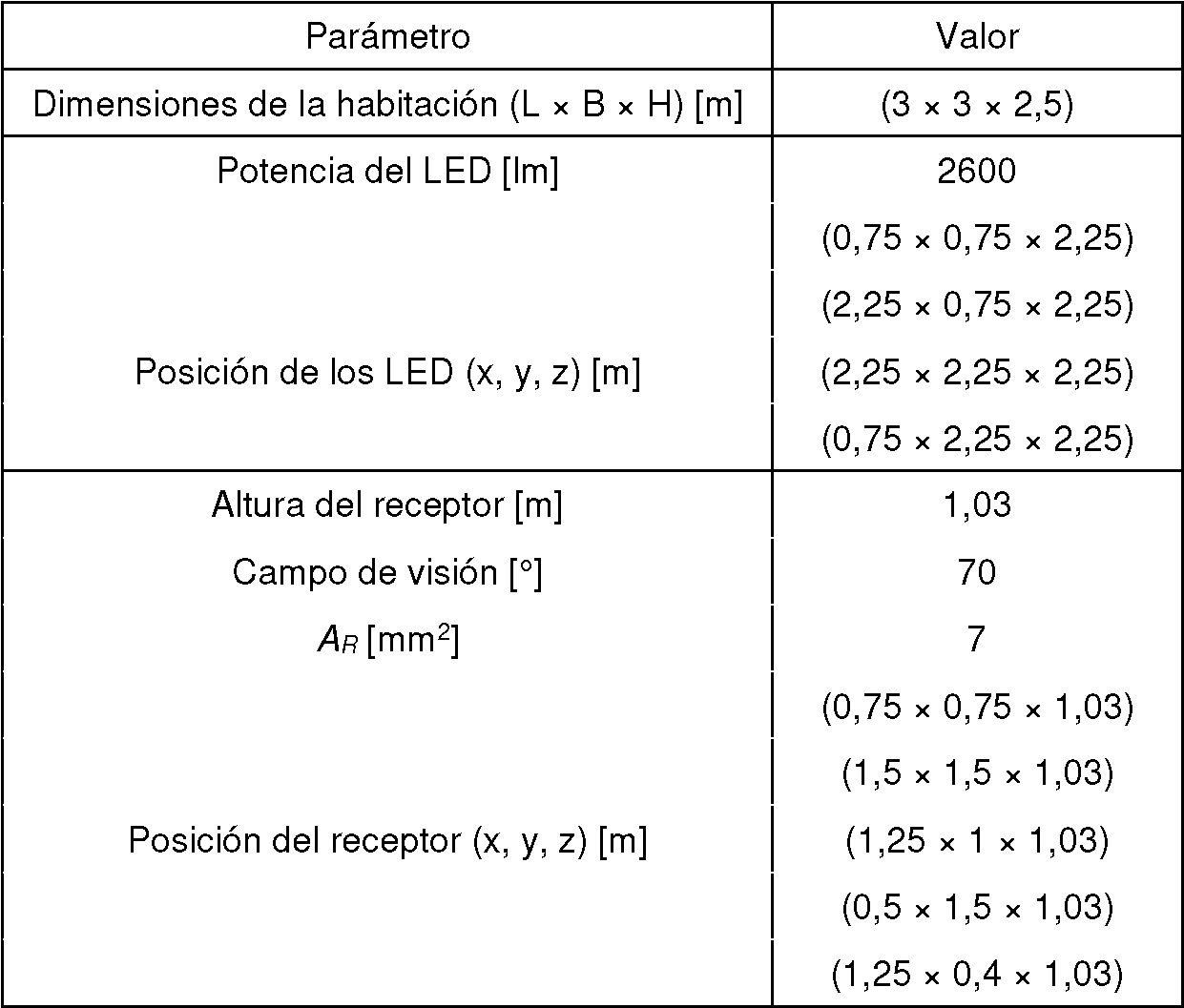
cuatro LED estándar (BXRA-56C2600) están distribuidos uniformemente por la superficie. Con esta disposición, la mesa se ilumina según el estándar (500 lux) cuando no hay comunicación. El receptor está colocado plano sobre la mesa, lo que da como resultado una altura constante h de 1,22 m entre los LED y el receptor. En este entorno, se eligieron cinco posiciones representativas para realizar mediciones y simulaciones. Para cada posición, la posición 2D (xe e ye) se estima, y el error de posición se calcula según la ecuación 17 (x e y son la posición exacta).
error =
y
 (Ecuación 17)
(Ecuación 17)
Para una implementación práctica, el ancho de banda en el lado del transmisor y del receptor debe ser lo más bajo posible. Esto permitirá utilizar la entrada de modulación de ancho de pulso (PWM - Pulse Width Modulation, en inglés) de los controladores LED actuales de alta eficiencia para modular el flujo de luz. Al primer LED se le asignó una frecuencia de base fü de 300 Hz, que es suficiente para superar el problema del parpadeo. Para la configuración a modo de ejemplo con cuatro LED, esto se obtuvo con un ancho de banda eléctrico y óptico de 2,4 kHz (8f0) en el lado del transmisor. El ancho de banda del receptor fue determinado por el tamaño de la FFT, donde un tamaño de FFT mayor requiere una velocidad de muestreo más alta. Se cambió la influencia del tamaño de FFT para ver cómo afecta el error de posición.
Para realizar las simulaciones se incluyeron todos los parámetros del banco de pruebas (Tabla 1) en un modelo Matlab. Para cada posición elegida en el entorno de prueba, se realizaron 103 simulaciones, donde para cada ejecución, se eligieron diferentes compensaciones de tiempo aleatorio entre las señales transmitidas (simulando el sistema no sincronizado). Las simulaciones no tuvieron en cuenta otras fuentes de ruido para evaluar la influencia del tamaño de la FFT en el error de posición. El sistema de posicionamiento utilizó trilateración, donde la posición del nodo móvil se encontró adoptando un ajuste de mínimos cuadrados. Las mediciones utilizaron los mismos datos que las simulaciones, es decir, los mismos retardos de tiempo entre las señales transmitidas. Los LED fueron controlados por Matlab con la tarjeta de obtención de datos NI USB-6212, por lo que no hay fluctuaciones de reloj entre las diferentes fuentes (figura 6). La diferencia con las simulaciones fue que otras fuentes de ruido están presentes en el sistema (a saber, el ruido de disparo causado por la luz circundante y el ruido terminal del receptor). La señal fue muestreada por el NI USB-6212 4 a la misma velocidad de muestreo que en las simulaciones. Los datos se procesaron posteriormente utilizando Matlab y se utiliza el mismo algoritmo de posicionamiento. En una segunda medición, los LED fueron controlados por microcontroladores Arduino no sincronizados. Esto introdujo retardos aleatorios entre las señales y la fluctuación del reloj. La señal recibida todavía fue muestreada por el Ni USB-6212, donde se realizó un procesamiento adicional dentro del entorno Matlab.
La Tabla II proporciona el valor P95 del error para cada posición para las simulaciones y mediciones. Los resultados se proporcionan para una velocidad de muestreo máxima en el receptor de 20 kSps y 100 kSps, que corresponde a un tamaño de FFT de 64 y 256 respectivamente. Las simulaciones muestran que el tamaño de la FFT no influye en el error de posición en ausencia de otras fuentes de ruido. A partir de las mediciones, se puede ver que el error de posición estará determinado principalmente por la otra fuente de ruido, tal como el ruido de disparo y el ruido
terminal. Con estas fuentes de ruido presentes, el tamaño de la FFT se vuelve más importante, para reducir el error de posición. Con un tamaño de FFT de 256, el P95 del error de posición es inferior a 10 cm. Cuando el Arduino se utiliza en el lado del transmisor, el error es del mismo orden, lo que indica que la fluctuación adicional del reloj introducida por las placas Arduino no afecta al rendimiento del sistema.
Tal como se describió anteriormente, se utilizó el fotodiodo BPX61 en las simulaciones y mediciones, pero este fotodiodo tiene un FOV de 70°. Esto podría causar errores de posición cuando las señales se reciben en ángulos de incidencia (y ) grandes. Las Figuras 10 y 11 muestran los resultados de la simulación para el P95 del error de posicionamiento sobre toda la superficie cuando se utiliza el BPX61. La Figura 10 muestra los resultados para una velocidad de muestreo de 19,2 kSps y un tamaño de FFT de 64. La Figura 11 ilustra la situación para una velocidad de muestreo de 76,8 kSps y un tamaño de FFT de 256. El gráfico muestra que el error aumenta rápidamente en las esquinas de la habitación, debido al FOV limitado. Cuando se repiten las simulaciones con el receptor PDA10A5 que tiene un FOV de 90°, los resultados se muestran en la Figura 12 y la Figura 13 (que, además, tienen respectivamente los mismos ajustes que la Figura 10 y la Figura 11). Con este receptor se puede reducir la posición a varios centímetros en toda la superficie.
Tabla 2: Descripción general de errores P95 en la posición para simulación y medición

Claims (14)
1. Un método para desmultiplexar una señal, po^ t), donde dicha señal, rtot(t), es una suma de al menos dos señales secundarias n(t), r2(t), ..., en el que cada señal secundaria comprende un patrón de repetición diferente, comprendiendo el método:
- muestreo de la señal, rtot(t), durante un período de tiempo, Tobs, donde el período de tiempo, Tobs, es tal que los diferentes patrones de repetición de cada señal secundaria ocurren al menos una vez en dicho período de tiempo, y donde al menos dos señales secundarias son periódicas durante el período de tiempo, Tobs, cada una con una periodicidad diferente, siendo un múltiplo entero de una frecuencia de observación definida por f=1/T ots o igual a la misma;
- expandir periódicamente la señal muestreada, rtot(t), en serie de Fourier y obtener diferentes componentes espectrales complejas de la señal periódicamente expandida, rPtot(t).
2. El método para desmultiplexar una señal, rtot(t), según la reivindicación 1, en el que, cuando dicha señal, rtot(t), es recibida en un extremo del receptor y dicha señal comprende al menos tres señales secundarias proporcionadas por al menos tres fuentes, el método comprende, además, determinar la posición del extremo del receptor basándose en las diferentes componentes espectrales complejas obtenidas para la señal expandida periódicamente.
3. El método para desmultiplexar una señal, rtot(t), según cualquiera de las reivindicaciones anteriores, en el que dicha señal secundaria es una señal de forma rectangular.
4. El método para desmultiplexar una señal, rtot(t), según cualquiera de las reivindicaciones anteriores, en el que dichas al menos dos señales secundarias son proporcionadas por al menos dos fuentes no comunicantes y no sincronizadas.
5. El método para desmultiplexar una señal, rtot(t), según cualquiera de las reivindicaciones anteriores, en el que el retardo de fase de las al menos dos señales secundarias es aleatorio.
6. Un sistema que comprende al menos dos fuentes de señal, cada una para generar una señal secundaria; y un dispositivo desmultiplexador adaptado para recibir una señal, rtot(t), en donde dicha señal, rtot(t), es una suma de dichas señales, n(t), r2(t) y en donde dicho dispositivo está adaptado para desmultiplexar la señal, rtot(t), en al menos dos señales secundarias n(t), r2(t) según el método de desmultiplexación según cualquiera de las reivindicaciones 1 a 5; y en donde dichas fuentes de señal están configuradas de tal manera que dichas señales secundarias son periódicas y con un patrón de repetición diferente durante dicho período de tiempo Tobs y con una periodicidad diferente un múltiplo entero o igual a dicha frecuencia de observación.
7. Un sistema según la reivindicación 6, en el que la desmultiplexación de la señal, rtot(t), es obtenida por un procesador, programado para realizar las etapas del método de desmultiplexación.
8. Un método para determinar la posición de un objeto basado en la luz visible de diferentes fuentes de luz, comprendiendo el método
- detectar, en el objeto para el que se va a determinar una posición, una señal representativa de las diferentes contribuciones de las diferentes fuentes de luz,
- desmultiplexar la señal utilizando un método tal como el descrito en cualquiera de las reivindicaciones 1 a 5, para obtener las diferentes contribuciones de las diferentes fuentes de luz, y
- obtener, basándose en las diferentes contribuciones determinadas de las diferentes fuentes de luz, una posición del objeto.
9. Un sistema de determinación de la posición, para determinar la posición de un objeto basándose en la luz visible de diferentes fuentes de luz, comprendiendo el sistema:
- un sistema, según la reivindicación 6 o 7,
- un medio de obtención de la posición, para obtener una posición basándose en las diferentes contribuciones determinadas de las diferentes fuentes de luz obtenidas del dispositivo desmultiplexador.
10. Un sistema de determinación de la posición según la reivindicación 9, comprendiendo el sistema de determinación de la posición un controlador de fuente de luz para controlar las diferentes fuentes de luz, cada una a una frecuencia específica predeterminada.
11. Un sistema de determinación de la posición según la reivindicación 10, comprende el sistema de posicionamiento, además, una pluralidad de diferentes fuentes de luz que son activadas por el controlador de la fuente de luz.
12. Un producto de programa informático para, cuando es ejecutado en un dispositivo informático, ejecutar un método para desmultiplexar una señal, rtot(t), según cualquiera de las reivindicaciones 1 a 5.
13. Un soporte de datos que comprende un producto de programa informático según la reivindicación 12.
14. Transmisión de un producto de programa informático, según la reivindicación 12, a través de una red de área amplia o local.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB1507632.6A GB201507632D0 (en) | 2015-05-05 | 2015-05-05 | Demultiplexing method and device |
| GBGB1510774.1A GB201510774D0 (en) | 2015-06-19 | 2015-06-19 | Demultiplexing method and device |
| US201562240998P | 2015-10-13 | 2015-10-13 | |
| US201562241001P | 2015-10-13 | 2015-10-13 | |
| PCT/EP2016/060153 WO2016177867A1 (en) | 2015-05-05 | 2016-05-06 | Demultiplexing method and device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| ES2907706T3 true ES2907706T3 (es) | 2022-04-26 |
Family
ID=57218135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| ES16720843T Active ES2907706T3 (es) | 2015-05-05 | 2016-05-06 | Método y dispositivo de desmultiplexado |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10823817B2 (es) |
| EP (1) | EP3292640B1 (es) |
| ES (1) | ES2907706T3 (es) |
| WO (1) | WO2016177867A1 (es) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3575665A (en) | 1967-06-15 | 1971-04-20 | Nippon Electric Co | Asynchronous demodulation system for pulse position modulation signal utilizing phase or frequency modulated higher harmonic of a sampling frequency |
| WO2011102662A2 (en) | 2010-02-17 | 2011-08-25 | Samsung Electronics Co., Ltd. | Apparatus and method for transmitting data by using visible light |
| US9418115B2 (en) | 2011-07-26 | 2016-08-16 | Abl Ip Holding Llc | Location-based mobile services and applications |
| TWI579580B (zh) | 2013-09-30 | 2017-04-21 | 鴻海精密工業股份有限公司 | 定位光源裝置、定位裝置及定位方法 |
| CN104181503A (zh) | 2014-08-04 | 2014-12-03 | 武汉邮电科学研究院 | 一种基于rss的led定位系统及方法 |
-
2016
- 2016-05-06 ES ES16720843T patent/ES2907706T3/es active Active
- 2016-05-06 WO PCT/EP2016/060153 patent/WO2016177867A1/en not_active Ceased
- 2016-05-06 US US15/571,616 patent/US10823817B2/en not_active Expired - Fee Related
- 2016-05-06 EP EP16720843.8A patent/EP3292640B1/en not_active Not-in-force
Also Published As
| Publication number | Publication date |
|---|---|
| US10823817B2 (en) | 2020-11-03 |
| US20180143291A1 (en) | 2018-05-24 |
| EP3292640A1 (en) | 2018-03-14 |
| WO2016177867A1 (en) | 2016-11-10 |
| EP3292640B1 (en) | 2021-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Zhang et al. | A 2-D indoor localization system based on visible light LED | |
| ES2652692T3 (es) | Métodos y aparatos para determinar una posición utilizando fuentes de luz | |
| ES2732059T3 (es) | Sistema y método para puesta en servicio de iluminación usando sonido | |
| KR102278016B1 (ko) | 광 기반 위치 결정 | |
| Luo et al. | Indoor positioning systems based on visible light communication: State of the art | |
| Do et al. | TDoA based indoor visible light positioning systems | |
| Xu et al. | Indoor positioning for multiphotodiode device using visible-light communications | |
| De Lausnay et al. | A visible light positioning system using frequency division multiple access with square waves | |
| US20100208236A1 (en) | Method for determining the position of an object in a structure | |
| Luo et al. | Experimental demonstration of an indoor visible light communication positioning system using dual-tone multi-frequency technique | |
| JP2016530745A (ja) | 符号化光成分の変調 | |
| CN104375119B (zh) | 一种基于时序标记的可见光定位系统和方法 | |
| Majeed et al. | Performance bounds on passive indoor positioning using visible light | |
| Alam et al. | Indoor visible light positioning using spring-relaxation technique in real-world setting | |
| Juneja et al. | Indoor positioning system using visible light communication | |
| Majeed et al. | Passive indoor localization for visible light communication systems | |
| ES2907706T3 (es) | Método y dispositivo de desmultiplexado | |
| CN109474345B (zh) | 一种基于可见光定位技术的免外控led调制方法 | |
| De Lausnay et al. | Influence of MAI in a CDMA VLP system | |
| Aparicio-Esteve et al. | Evaluation of MAI effect in encoding techniques for an infrared positioning system | |
| KR20250123123A (ko) | Uwb 로컬라이징 네트워크에서 모바일 디바이스들을 위치측정하기 위한 방법 | |
| De Lausnay et al. | A test bench for a VLP system using CDMA as multiple access technology | |
| JP2023038731A (ja) | 照明制御装置、照明制御システム及び方法 | |
| EP3336574B1 (en) | System for determining a position of a tag and corresponding method | |
| Zhan et al. | iTracking: Accurate light-based location-tracking in wireless sensor networks |