ES2955496T3 - Limitador de posición de encaje a presión para una cinta transportadora - Google Patents
Limitador de posición de encaje a presión para una cinta transportadora Download PDFInfo
- Publication number
- ES2955496T3 ES2955496T3 ES15740222T ES15740222T ES2955496T3 ES 2955496 T3 ES2955496 T3 ES 2955496T3 ES 15740222 T ES15740222 T ES 15740222T ES 15740222 T ES15740222 T ES 15740222T ES 2955496 T3 ES2955496 T3 ES 2955496T3
- Authority
- ES
- Spain
- Prior art keywords
- position limiter
- shaft
- roller
- limiter
- snap
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004140 cleaning Methods 0.000 claims description 13
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 230000013011 mating Effects 0.000 claims description 2
- 238000000605 extraction Methods 0.000 claims 1
- 238000004519 manufacturing process Methods 0.000 claims 1
- 238000000034 method Methods 0.000 description 7
- 239000000463 material Substances 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000007704 transition Effects 0.000 description 4
- 229920003023 plastic Polymers 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 238000006748 scratching Methods 0.000 description 3
- 230000002393 scratching effect Effects 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000007790 scraping Methods 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229920001169 thermoplastic Polymers 0.000 description 1
- 239000004416 thermosoftening plastic Substances 0.000 description 1
- 229920000785 ultra high molecular weight polyethylene Polymers 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G15/00—Conveyors having endless load-conveying surfaces, i.e. belts and like continuous members, to which tractive effort is transmitted by means other than endless driving elements of similar configuration
- B65G15/60—Arrangements for supporting or guiding belts, e.g. by fluid jets
- B65G15/62—Guides for sliding belts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G23/00—Driving gear for endless conveyors; Belt- or chain-tensioning arrangements
- B65G23/02—Belt- or chain-engaging elements
- B65G23/04—Drums, rollers, or wheels
- B65G23/06—Drums, rollers, or wheels with projections engaging abutments on belts or chains, e.g. sprocket wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G23/00—Driving gear for endless conveyors; Belt- or chain-tensioning arrangements
- B65G23/44—Belt or chain tensioning arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G45/00—Lubricating, cleaning, or clearing devices
- B65G45/10—Cleaning devices
- B65G45/12—Cleaning devices comprising scrapers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Belt Conveyors (AREA)
- Structure Of Belt Conveyors (AREA)
- Rollers For Roller Conveyors For Transfer (AREA)
Abstract
Un transportador emplea una cinta transportadora de accionamiento directo de baja tensión y un limitador de posición de encaje a presión para garantizar el acoplamiento adecuado de la cinta y una rueda dentada impulsora. El limitador de posición incluye un cuerpo, una superficie limitadora y una abrazadera de presión opuesta a la superficie limitadora para fijar el limitador de posición a un eje de montaje. La superficie limitadora puede comprender rodillos giratorios montados en el cuerpo, o una superficie arqueada continua. El limitador de posición puede incluir un brazo de montaje para montar un raspador de cinta transportadora en la parte delantera del limitador de posición. (Traducción automática con Google Translate, sin valor legal)
Description
DESCRIPCIÓN
Limitador de posición de encaje a presión para una cinta transportadora
SOLICITUDES RELACIONADAS
La presente solicitud reivindica prioridad sobre la Solicitud de Patente Provisional estadounidense número 61/931.058 titulada "Limitador de posición de encaje a presión para una cinta transportadora", presentada el 24 de enero de 2014, y la Solicitud de Patente Provisional estadounidense número 62/006.427 titulada "Limitador de posición de encaje a presión para una cinta transportadora", presentada el 2 de junio de 2014 y la Solicitud de Patente Provisional estadounidense número 62/061.346 titulada "Limitador de posición de encaje a presión para una cinta transportadora", presentada el 8 de octubre de 2014.
ANTECEDENTES
La invención se refiere de forma general a transportadores accionados por motor y, más particularmente, a cintas sin fin termoplásticas dentadas accionadas por ruedas dentadas.
Los limitadores de posición, como los descritos en la patente de estadounidense 7.850.562, se utilizan en sistemas de correas de accionamiento positivo y baja tensión para garantizar un acoplamiento correcto de la cinta y la rueda dentada motriz mediante el control de la posición de la cinta durante el proceso de paso del diente motriz. Se puede disponer un limitador de posición contra la cinta cerca del punto de salida. Ejemplos de limitadores de posición incluyen rascadores, rodillos y zapatas. El documento US 7.850.562 divulga un limitador de posición para un transportador de accionamiento directo en el que el limitador de posición comprende un cuerpo, una superficie limitadora que se extiende en un primer extremo del cuerpo y una abrazadera de encaje a presión en un segundo extremo del cuerpo para montar el cuerpo a un eje y un transportador de accionamiento directo con dicho limitador de posición.
Los limitadores de posición actuales se fijan a un eje de montaje, que puede atrapar suciedad y residuos e impedir el desmontaje y/o sustitución del limitador de posición. Además, los limitadores de posición actuales se colocan generalmente donde la cinta transportadora caería de forma natural lejos de la rueda dentada motriz cuando no se aplica tensión previa, que típicamente es a 165° del enrollamiento desde donde la cinta entra en la rueda dentada motriz. De este modo, el limitador de posición compite por el mismo espacio que un rascador de cinta, si se utiliza. Además, el limitador de posición debe estar alineado axialmente con las ruedas dentadas motrices, lo que requiere collarines de bloqueo o sujeciones que pueden convertirse en zonas de refugio para las bacterias, presentando así riesgos para la seguridad alimentaria.
El documento US 7.681.719 B2 divulga un conjunto de cola de transferencia para el uso con un conjunto transportador que crea una transición de radio reducido desde el tramo superior al tramo inferior de una cinta transportadora continua utilizada con el conjunto transportador.
El documento WO 87/05585 A1 divulga un dispositivo de rascado para la limpieza de cintas transportadoras con un eje de soporte dispuesto debajo de la cinta transportadora para los brazos de resorte montables en el mismo, con cuchillas de rascado dispuestas en los extremos que se presionan contra la cinta transportadora en un ángulo predeterminado.
RESUMEN
En un primer aspecto, la presente invención proporciona un limitador de posición de acuerdo con la reivindicación 1.
En otro aspecto, la presente invención proporciona un transportador de accionamiento directo, de acuerdo con la reivindicación 17.
En otro aspecto, la presente invención proporciona el uso de un limitador de posición de acuerdo con la reivindicación 18.
BREVE DESCRIPCIÓN DE LAS ILUSTRACIONES
Los sistemas y métodos divulgados se pueden comprender con referencia a las siguientes ilustraciones. Los componentes de las ilustraciones no están necesariamente a escala.
La FIG. 1 muestra una porción de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición de acuerdo con una realización de la invención;
La FIG. 2 es una vista isométrica del limitador de posición de la FIG. 1;
Las FIGS. 3A-3C ilustran el proceso de montaje del limitador de posición de la FIG. 1 en una barra de soporte;
La FIG. 4 muestra una vista despiezada de un extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición según una realización de la invención;
La FIG. 5 es una vista ensamblada del sistema de la FIG. 4 durante el montaje del conjunto limitador de posición; La FIG. 6 muestra el sistema de la FIG. 5 en un paso posterior durante el proceso de montaje;
La FIG. 7A muestra el sistema de la FIG. 5 completamente montado;
La FIG. 7B es una vista interior del sistema montado de la FIG. 7A;
La FIG. 8 es otra vista de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición según otra realización de la invención;
La FIG. 9A es una vista isométrica de un limitador de posición que incluye unos rodillos montados según otra realización de la invención;
La FIG. 9B es otra vista del limitador de posición de la FIG. 9A;
La FIG. 10 es una vista despiezada del limitador de posición de la FIG. 9A;
La FIG. 11 muestra una vista isométrica de una porción de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye el limitador de posición de la FIG. 9A;
La FIG. 12 es una vista isométrica de una porción de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición con un rascador montado sobre el mismo de acuerdo con otra realización de la invención;
La FIG. 13 es una vista isométrica de una porción de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición con una configuración de rascador alternativa;
La FIG. 14 es una vista isométrica de una porción de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición con una configuración de rascador alternativa;
La FIG. 15 es una vista isométrica de una porción de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición con una configuración de rascador alternativa;
La FIG. 16 es una vista isométrica de una porción de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición con una configuración de rascador alternativa;
La FIG. 17 muestra un sistema de cinta transportadora que incluye un conjunto limitador de posición con un rascador montado en el mismo; y
La FIG. 18 es una vista de extremo de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un conjunto limitador de posición diseñado para acomodar aletas en una banda transportadora. La FIG. 19 muestra otra realización de un limitador de posición;
La FIG. 20 muestra otra realización de un limitador de posición;
La FIG. 21 muestra el limitador de posición de la FIG. 20 montado en un eje;
La FIG. 22 muestra un conjunto de rueda dentada montado en un eje motriz;
La FIG 23 es una vista isométrica de un limitador de posición que incluye rodillos que forman una superficie limitadora según otra realización de la invención;
La FIG. 24 es una vista lateral del limitador de posición de la FIG. 23;
La FIG. 25 es una vista superior del limitador de posición de la FIG. 23;
La FIG. 26 es una vista isométrica del limitador de posición de la FIG. 23;
La FIG. 27 es una vista lateral de un limitador de posición adecuado para limitar un borde de una cinta transportadora según otra realización de la invención;
La FIG. 28 es una vista isométrica del limitador de posición de la FIG. 27;
La FIG. 29 es una vista frontal del limitador de posición de la FIG. 27;
La FIG. 30 es una vista superior del limitador de posición de la FIG. 27;
La FIG. 31 es una vista inferior del limitador de posición de la FIG. 27;
La FIG. 32 es una vista posterior del limitador de posición de la FIG. 27;
La FIG. 33 es una vista isométrica de un limitador de posición del borde montado en un bastidor del transportador usando un dispositivo de montaje;
La FIG. 34 es otra vista del limitador de posición del borde de la FIG. 33;
La FIG. 35 muestra otro limitador de posición del borde montado en un bastidor usando una base de montaje; La FIG. 36A es una vista lateral de un limitador de posición según otra realización de la invención;
La FIG. 36B es una vista isométrica del limitador de posición de la FIG. 36A;
La FIG. 36C es una vista lateral del limitador de posición de la FIG. 36A montado en un eje;
La FIG. 36D es una vista isométrica del limitador de posición y el eje de la FIG. 36C;
La FIG. 37A-D muestra otra realización de un soporte de rascador montado en un eje según otra realización de la invención;
Las FIGS. 38A-38D muestran una base de rascador adecuada para el uso con el soporte del rascador de las FIGS.
37A-37D;
Las FIGS. 39A y 39B muestran un eje que incluye una pluralidad de soportes de rascador montados en el mismo y la cuchilla del rascador soportada por los soportes del rascador;
Las FIGS. 40A y 40B muestran otra realización de un conjunto de cuchilla del rascador montada en un eje;
Las FIGS. 41A y 41B muestran otra realización de un conjunto de cuchilla del rascador montada en un eje;
Las FIGS. 42A-42C muestran una porción de extremo de un transportador que incluye una pluralidad de limitadores de posición y un conjunto de cuchilla del rascador montado en un eje según una realización de la invención; Las FIGS. 43A-C muestran la porción de extremo de las FIGS. 42A-42C en una primera posición;
Las FIGS. 44A-44C muestran la porción de extremo de las FIGS. 42A-42C en una segunda posición; y las FIGS.
45A-45C muestran la porción de extremo de las FIGS. 42A-42C en una tercera posición.
DESCRIPCIÓN DETALLADA
Un transportador emplea una cinta transportadora de accionamiento positivo, una rueda dentada motriz y un limitador de posición de encaje a presión para garantizar el acoplamiento correcto de la cinta y la rueda dentada motriz. El limitador de posición se puede instalar, retener y retirar de un eje sin el uso de herramientas, o con un uso mínimo de herramientas. Las realizaciones del limitador de posición emplean una abrazadera de encaje a presión que tiene un anclaje, como un saliente que se acopla a un canal en un eje del transportador, denominado barra de herramienta. Un cuerpo de la abrazadera de encaje a presión se acopla con el cuerpo del eje. Opcionalmente, una lengüeta axial encaja en una muesca u otro asiento del eje. El cuerpo relajado de la abrazadera de encaje a presión puede ser diferente del eje, pero en forma estirada o comprimida para adaptarse al eje y bloquearse en su lugar. La abrazadera de encaje a presión puede utilizarse para montar de forma intercambiable componentes en el eje, al tiempo que bloquea los componentes axial y radialmente con respecto al eje durante el funcionamiento. La invención se describirá a continuación en relación con determinadas realizaciones ilustrativas, aunque la invención no se limita a dichas realizaciones ilustrativas.
La FIG. 1 ilustra una porción de un sistema de cinta transportadora de accionamiento directo y baja tensión que incluye un limitador de posición 50 según una realización de la invención. El sistema de cinta transportadora ilustrativo incluye una cinta transportadora de accionamiento positivo y baja tensión, como las cintas THERMODRIVE®, disponibles en Intralox, LLC de Harahan, LA. La cinta transportadora ilustrativa 10 incluye elementos de accionamiento, mostrados como dientes motrices 12 (también conocidos como barras motrices) que encajan en los huecos 22 de la rueda dentada motriz 20 correspondiente. Un limitador de posición 50, montado en un eje 40 dispuesto debajo de la rueda dentada, garantiza que la cinta engrane en la rueda dentada 20. El limitador de posición 50 está dispuesto en relación con la rueda dentada 20 para crear un canal a través del cual pasa la cinta 10. En la realización ilustrativa, el limitador de posición 50 encaja a presión en el eje para facilitar el montaje y desmontaje del sistema transportador. El eje incluye medios de acoplamiento para limitar el movimiento axial y radial del limitador de posición una vez encajado a presión en el eje, como se describe a continuación. En la
realización ilustrativa, el limitador de posición 50 es de plástico y el eje 40 es de acero inoxidable, aunque pueden utilizarse otros materiales.
En la realización ilustrativa, el paso de la rueda dentada es menor que el paso de la cinta transportadora, de modo que sólo un diente de la cinta transportadora es accionado activamente por la rueda dentada a la vez. La cinta se acopla a la rueda dentada en la posición superior 13 y comienza a enrollarse alrededor de la rueda dentada 20. La rueda dentada 20 engrana activamente un diente motriz 12 en una posición de activación y libera el diente motriz en una posición de liberación. En la realización ilustrativa, el limitador de posición 50 está dispuesto de tal manera que el frontal de la superficie limitadora topa con la cinta transportadora en una posición frontal que está entre aproximadamente 160° y aproximadamente 220° de la posición superior 13 (siendo la posición superior 0°). La superficie limitadora del limitador de posición se extiende preferentemente al menos un paso completo (por ejemplo, más de 36° para una rueda dentada de diez dientes) antes de alejarse de la cinta en la posición de liberación 15. En una realización, la posición de liberación 15 está a unos 250° de la posición superior 13, aunque la invención no se limita sólo a eso. Preferiblemente, el limitador de posición está montado fuera del flujo del producto y está conformado para evitar la acumulación de producto. Sin el limitador de posición, la cinta, cuando no está pretensada, tendería a soltarse de la rueda dentada a unos 165° El limitador de posición 50 ilustrativo permite un mayor enrollamiento de la cinta alrededor de la rueda dentada, alejando así el limitador de posición del flujo de los alimentos transportados.
Preferiblemente, la rueda dentada acciona sólo un diente de la rueda a la vez, excepto durante el tiempo en que el diente accionado de guía se desacopla de la rueda dentada y pasa al diente inmediatamente posterior, cuando éste se convierte en el diente accionado de guía. El limitador de posición 50 ayuda a controlar este traspaso.
Con respecto a la FIG. 2, un limitador de posición 50 de una realización de la invención incluye un cuerpo principal 52. La parte superior del cuerpo principal forma una superficie limitadora 54 diseñada para acoplar una cinta transportadora 10 para asegurar el acoplamiento adecuado entre la cinta y la rueda dentada correspondiente. La superficie limitadora ilustrativa 54 cubre una longitud que es mayor que un paso de la rueda dentada, aunque la invención no se limita sólo a eso. Un elemento de fijación, ilustrado como una abrazadera de encaje a presión 60, en el extremo opuesto del cuerpo principal fija el limitador de posición a un eje.
La superficie limitadora 54 proporciona contacto de área en la cinta transportadora, e incluye una porción cóncava 55 en un extremo delantero conectada a una porción convexa 56 en un extremo posterior. La porción cóncava 55 y la porción convexa 56 pueden estar conectadas tangencialmente. La porción cóncava ilustrativa tiene un arco menos profundo que el arco de la porción convexa 56. Como se muestra, la porción cóncava 55 coincide con el perfil de la rueda dentada asociada. La porción cóncava se curva preferiblemente a través de un arco correspondiente a al menos y preferiblemente mayor que un paso de la rueda dentada (al menos 36° para una rueda dentada de 10 dientes). El borde de guía 57 de la superficie limitadora puede ser afilado o tener otra forma. La forma y el tamaño de la porción convexa 56 se seleccionan en función de las propiedades de la cinta transportadora asociada. La porción convexa 56 gestiona la flexión hacia atrás de la cinta, por lo que la forma y el tamaño de la porción convexa 56 están relacionados con la ratio de flexión hacia atrás de la cinta y se seleccionan para gestionar adecuadamente la flexión hacia atrás, y controla el desacoplamiento del diente de la cinta accionada, forzando suavemente un diente de vuelta al hueco accionado a medida que se acerca al limitador. La transición entre la porción convexa y cóncava corresponde al punto de liberación 15 de la cinta transportadora de la rueda dentada 20.
El cuerpo ilustrativo 52 conecta la superficie limitadora 54 con la abrazadera de encaje a presión 60 y puede estar conformado para reducir la masa.
La abrazadera de encaje a presión 60 ilustrativa comprende un elemento de agarre sustancialmente semicircular que forma dos patas 64 y 65. La abrazadera 60 está definida por una superficie radialmente exterior 61, una superficie radialmente interior 62 y superficies laterales 63. La primera pata 64 termina en una superficie de extremo plana 69, mientras que la segunda pata 65 termina en una punta de aletilla 66. La punta de aletilla está definida por una superficie exterior de punta angulada 67 y una superficie de punta interior 68, que se cruzan para formar la aleta. La superficie de la punta interior se extiende radialmente hacia el interior desde la superficie radial interior 62. Una lengüeta 70 se extiende entre la superficie radialmente interior 62 de la abrazadera y la punta 66. La lengüeta 70 coincide con un hueco en un eje 40 correspondiente, como se describe más abajo.
La superficie radialmente interior 62 puede incluir cámaras de limpieza o huecos para mejorar la facilidad de limpieza cuando el limitador de posición está montado en un eje.
La punta 66 puede estar más baja que el extremo 69 de la primera pata cuando la superficie de la punta interior 68 es sustancialmente horizontal. La superficie inferior 69 y la superficie de la punta interior 68 pueden no ser paralelas. La rigidez y la tensión de la abrazadera de encaje a presión 60 pueden variar en función del material utilizado, el grosor de las patas, el grado de enrollamiento del elemento de agarre y otros factores que pueden variar.
Preferiblemente, la abrazadera de encaje a presión 60 es integral con el cuerpo del limitador de posición, aunque la invención no se limita sólo a eso.
Las FIGS. 3A-3B ilustran el proceso de encaje a presión en un limitador de posición que incluye una abrazadera de encaje a presión, como el limitador de posición 50, en un eje 40 en un sistema de transporte de acuerdo con una realización de la invención. El método ilustrativo de fijación del limitador de posición a un eje puede utilizarse para fijar cualquier componente del transportador a otro elemento del transportador utilizando una geometría de bloqueo de encaje a presión integrada tanto en el componente del transportador como en el elemento del transportador. El componente del transportador se fija al bastidor estirando el componente sobre el centro en torno al elemento del transportador impartiendo una fuerza superior a la que experimenta el componente en reposo. La geometría de acoplamiento en el limitador de posición y el eje se acoplan para fijar el limitador de posición al eje. En una realización, el diámetro interior más pequeño de la abrazadera de encaje a presión es menor que el diámetro exterior del elemento transportador de acoplamiento. Alternativamente, el limitador de posición u otro componente del transportador se puede comprimir para permitir el acoplamiento.
En las FIGS. 3A y 3B, el eje ilustrativo 40 tiene una superficie inferior plana 42 que se extiende entre los extremos de una superficie exterior redondeada 43. La superficie inferior plana 42 incluye al menos un canal sustancialmente lineal 44 que se extiende desde un primer extremo hasta un segundo extremo. Como se muestra en la FIG. 3A, el limitador de posición se coloca primero cerca del eje de tal manera que la lengüeta de alineación axial 70 se alinea con una muesca de alineación 41 en el eje 40 y las patas 64, 65 se sitúan a horcajadas sobre el eje 40. Entonces, un usuario inserta la punta 66, que funciona como una chaveta, dentro de un hueco 44, que funciona como un chavetero, en el lado de la superficie plana 42 del eje 40, como se muestra en la FIG. 3B, mientras se gira la primera pata 64 alrededor de la superficie exterior 43 del eje hasta que la primera pata 64 contacta con el eje 40. Después, como se muestra en la FIG. 3C, el usuario inicia la fuerza de sujeción estirando la pata 64 sobre el centro del eje para encajar el limitador de posición 50 en su lugar, mientras inserta la lengüeta 70 en la muesca 41 para evitar el movimiento axial del limitador de posición con respecto al eje. El encaje entre la punta 66 y el hueco 44 impide el movimiento radial del limitador de posición 50 con respecto al eje 40. Las patas de la abrazadera de encaje a presión se flexionan ligeramente para permitir el montaje del limitador de posición 50 en el eje, y luego vuelven a su sitio tras girar sobre su centro para bloquear el limitador de posición en el eje 40. Cuando está encajado, la superficie axialmente interior 62 del limitador de posición 50 topa con la superficie exterior redondeada 43 del eje 44.
En otra realización, se mantiene una fuerza de sujeción continua haciendo que el diámetro interior de las patas 64, 65 sea menor que el diámetro exterior del eje 40, de manera que la abrazadera de encaje a presión 60 ilustrativa está sometida a una presión continua mientras se mantiene dentro de los límites de fluencia de sus propiedades materiales.
En otras realizaciones, un pequeño saliente está añadido a la periferia de la superficie radial interior 62 de la pata 64 de forma que se acopla con una muesca en el eje 40 cuando la abrazadera 60 está totalmente asentada en el eje 40.
El diseño de enclavamiento del limitador de posición permite el montaje en un eje sin sujeciones ni otras herramientas. La abrazadera de encaje a presión ilustrativa garantiza que el componente montado en la misma no gire sobre el eje 40 ni se deslice a lo largo del mismo.
Las FIGS. 4-7B ilustran un proceso de montaje de un eje 40 con una pluralidad de limitadores de posición 50 montados sobre el mismo en un bastidor del transportador. El bastidor del transportador incluye las placas de extremo del transportador 81, 82 para montar un eje o árbol 21 que contiene una o más ruedas dentadas 20 y recibe un eje 40 que mantiene uno o más limitadores de posición 50 en su lugar contra una cinta transportadora 10. Cada una de las placas de extremo del transportador incluye un hueco 83 para montar el eje que contiene las ruedas dentadas 20. Como se muestra, los ejes 21 que se extienden desde la rueda dentada se insertan en los huecos 83. Como se muestra, el eje 40 está montado entre dos placas de soporte de los ejes 91, 92, que a su vez están montadas en el bastidor del transportador para disponer los limitadores de posición 50 en relación con la cinta transportadora 10. Una serie de limitadores de posición 50 están montados a lo largo del eje 40.
Las placas de soporte del eje ilustrativas tienen la forma de un triángulo redondeado. El eje 40 está montado entre dos puntos 91 a, 92a en las placas 91,92. Frente al extremo del eje, las placas de soporte del eje incluyen lengüetas de montaje 93, que tienen lados planos en la realización ilustrativa. Las lengüetas de montaje de lados planos 95 se extienden desde otra posición en las placas 91, 92.
Las herramientas 96 se proporcionan para acoplar las lengüetas 93, 95 en las placas de soporte triangulares 91, 92 para colocar y orientar el eje y los limitadores de posición. Cada herramienta 96 incluye un vástago 97, una manija 98 y una porción de leva desplazada 99 formando un canal.
Las lengüetas de montaje 94 se extienden desde un tercer punto 91b, 92b en la placa de soporte del eje triangular. Las lengüetas de montaje ilustrativas son circulares en sección transversal, aunque la invención no se limita sólo a eso. Los huecos 84 en las placas de extremo del transportador reciben rotatoriamente las lengüetas de montaje 94, como se muestra en la FIG. 5, para disponer los limitadores de posición en una primera posición en relación con la cinta transportadora.
Una vez que las lengüetas de montaje 94 se han insertado en los huecos 84, el vástago de la herramienta 97 se inserta en una cavidad 88 de tal manera que la ranura en la porción de leva 99 se dispone adyacente a una abertura de la herramienta 89 en la placa de extremo del transportador, como se muestra en la FIG. 5. A continuación, el conjunto del eje se gira alrededor de las lengüetas de montaje 94, de forma que las lengüetas 95 se alinean con las aberturas 89. Inicialmente, las herramientas 96 se disponen de forma que el canal de la leva quede separado de la abertura. Un usuario mueve la manija 98, pivotando la herramienta 96 alrededor del vástago 97, provocando que la porción de leva desplazada 99 gire para encajar con la lengüeta 95, bloqueando el conjunto del eje en la posición mostrada en la FIG. 6 con respecto a la cinta transportadora 10. Después, un usuario o una herramienta automática libera las herramientas y gira el conjunto del eje a una posición acoplada, mostrada en las FIGS. 7A y 7B. En la posición acoplada, los limitadores de posición 50 se disponen adyacentes a la cinta transportadora en una posición seleccionada adecuada para garantizar el acoplamiento de la rueda dentada 20 y la cinta 10. En esta posición, las lengüetas 93 se alinean con las aberturas 89. Las herramientas 96 se giran entonces a la posición de acoplamiento para retener las lengüetas 93 y el conjunto del eje en la posición acoplada. Si se desea, el conjunto del eje se puede mover fácilmente a una posición desacoplada o retirarse del bastidor del transportador.
La FIG. 8 muestra otra realización de un transportador 2 que emplea limitadores de posición 50 para una cinta transportadora 10 en una polea motorizada o un eje que contiene al menos una rueda dentada 20 según otra realización de la invención. En esta realización, las herramientas 196 se utilizan para fijar un conjunto de eje, que comprende un eje 40 con limitadores de posición montados sobre el mismo y que se extiende entre dos placas de soporte del eje 91' 92', en una posición acoplada o desacoplada con respecto a las placas de soporte de la rueda dentada 81', 82'. Las herramientas ilustrativas 196 son pinzas de manipulación de material DE-STA-CO, disponibles en DE-STA-CO de Auburn Hills, MI. Las herramientas 196 insertan selectivamente los pasadores en las aberturas de las placas laterales 81', 82', 91', y/o 92' para ayudar a posicionar el conjunto del eje.
Pueden disponerse otras manijas adecuadas para posicionar un conjunto de limitadores de posición en relación con una cinta. Por ejemplo, se puede usar una manija que se conecta a un eje 40 y pueda bloquearse en su lugar para maniobrar una serie de limitadores de posición en el eje.
La FIG. 8 también muestra una guía de cinta 210 conectada al conjunto del eje para ayudar a guiar la cinta transportadora 10 tras liberarse de la rueda dentada 20.
Las FIGS. 9A y 9B ilustran un limitador de posición 150 que incluye rodillos según otra realización de la invención. El limitador de posición 150 incluye una superficie limitadora formada por dos rodillos 156 y 155. Los dos rodillos limitadores 155,156 están dispuestos aproximadamente un paso de distancia de la rueda dentada cerca del diente guía y de la posición de descarga del diente. Los rodillos están montados entre las placas laterales 152,153 mediante ejes 157,158. El limitador de posición de rodillos 150 es especialmente adecuado para entornos abrasivos. El limitador de posición 150 incluye una abrazadera de encaje a presión 160 formada por las placas laterales. La abrazadera de encaje a presión tiene una forma similar a la abrazadera de encaje a presión del limitador de posición 50.
El cuerpo del limitador de posición está formado por dos placas laterales 152,153 que flanquean los rodillos y forman la abrazadera de encaje a presión 160. En una realización, las placas laterales 152,153 pueden ser de plástico, los rodillos pueden ser de UHMW (polietileno de ultra alto peso molecular) y los ejes pueden ser de acero inoxidable. Como se muestra, la abrazadera de encaje a presión 160 comprende un hueco sustancialmente semicircular en las placas. La abrazadera de encaje a presión 160 incluye una punta de aletilla 166 y una lengüeta 170.
En otra realización ilustrativa, se utilizan dos limitadores de posición para sustentar uno o más rodillos entre ellos. En esta realización, que no se muestra, los rodillos o ejes de rodillo podrían asentarse en monturas en el cuerpo del limitador.
Como se muestra en la FIG. 10, los ejes 157,158 incluyen una porción central agrandada y extremos de menor diámetro, donde los ejes se extienden hacia las placas laterales.
Las placas laterales 152,153 pueden acoplarse entre sí para montar los rodillos y ensamblar el limitador de posición 150 a través de cualquier medio adecuado, incluyendo, entre otros, una conexión de encaje a presión, encolado, soldadura o utilizando un dispositivo de fijación. Una vez ensambladas, las placas forman cavidades para el montaje
de los rodillos 155, 156. El limitador de posición 150 controla el paso de dientes entre una cinta de accionamiento positivo y una rueda dentada motriz mediante los dos rodillos limitadores 155,156.
La FIG. 11 muestra el limitador de posición 150 cuando está montado en un eje 40 para colocar el limitador de posición 150 con respecto a la cinta transportadora 10 enrollada alrededor de una rueda dentada 20. El limitador de posición 150 se monta en el eje 44 de forma similar al limitador de posición 150. En la realización ilustrativa, el rodillo trasero 155 es más grande que el rodillo delantero 156. Los bordes superiores de las placas 152, 153 tienen una curva ligeramente cóncava entre los dos extremos redondeados donde se montan los rodillos. La forma de los rodillos y los bordes superiores de la placa se seleccionan de tal manera que el rodillo delantero más pequeño 156 contacta o topa con la cinta transportadora en una posición de limitación 114 que está entre aproximadamente 160° y aproximadamente 220° desde la parte superior, y preferiblemente entre aproximadamente 165° y aproximadamente 215° para realizar la limitación, mientras que el rodillo trasero más grande 155 gestiona la flexión hacia atrás en la cinta 10 tras liberar la rueda dentada 20 en la posición de liberación 115, que es preferiblemente una distancia de al menos un paso de la rueda dentada más allá de la posición de limitación 114.
El montaje del limitador de posición del rodillo en un eje 40 mediante la abrazadera de encaje a presión 160 puede bloquear los componentes en su lugar uno respecto del otro, como se muestra en la FIG. 11.
Preferiblemente, los rodillos giran libremente sobre los ejes.
Los rodillos pueden constar de mitades de rodillo que se acoplan para formar un rodillo completo. La anchura de los rodillos puede variar en función de los requisitos del limitador de posición.
Además, puede montarse un tercer rodillo entre los rodillos delantero y trasero 155,156 para proporcionar una fuerza limitadora adicional. Cualquier número adecuado de rodillos puede formar la superficie limitadora del limitador de posición.
Según otra realización de la invención, mostrada en la FIG. 12, un limitador de posición 250 puede incluir un brazo de soporte 220 para recibir un rascador de cinta transportadora 230 o una base para un rascador. El rascador se extiende desde el brazo de montaje 220 y contacta con la cinta transportadora para eliminar los residuos previamente al limitador de posición 250. El rascador ilustrativo está ligeramente curvado debido al efecto de muelle del material, y tiene una sección transversal constante, aunque el rascador puede tener cualquier forma adecuada. En otra realización, no mostrada, el brazo de soporte que recibe un rascador de cinta o la base para un rascador incluye una abrazadera de encaje a presión integrada omitiendo un cuerpo limitador.
Las FIGS. 13-16 muestran diversas realizaciones del rascador 231, 232, 233 y 234 montados en un limitador de posición 250. Por ejemplo, el rascador 231 de la FIG. 13 tiene una sección transversal sustancialmente en forma de lágrima con una superficie frontal plana montada en una base 239 insertada en el brazo de soporte 220 del limitador de posición 250. La superficie frontal y la superficie posterior se estrechan hacia una punta para rascar la cinta. El rascador 232 de la FIG. 14 incluye una parte frontal plana, una superficie trasera conformada y una superficie de rascado curvada orientada hacia la cinta transportadora 10. El rascador 234 de la FIG. 15 incluye una superficie exterior conformada y una superficie interior que tiene una sección inferior y una sección superior que mira hacia la cinta transportadora, proporcionando un área de contacto mayor con la cinta transportadora 10. El rascador 234 está conectado a una base doblada 239' insertada en el brazo del rascador del limitador de posición 220. Como se muestra en la FIG. 16, en otra realización, el rascador 235 puede tener una superficie exterior plana y una superficie interior conformada que proporciona un área de contacto aún mayor con la cinta transportadora 10. La FIG. 17 muestra un eje de montaje 40 con una pluralidad de limitadores de posición del rascador 250 estando dispuesto en un bastidor del transportador 280, similar a las realizaciones anteriores. El conjunto de eje está montado para colocar el rascador 231 en posición de rascado con respecto a la cinta transportadora 10.
En otra realización, el rascador es independiente del limitador de posición y está montado separadamente del eje. El soporte de rascador se puede montar utilizando una abrazadera de encaje a presión u otro dispositivo adecuado al eje en una dirección opuesta al limitador de posición.
Según otra realización de la invención, mostrada en la FIG. 18, las placas de soporte y la barra de soporte para una serie de limitadores de posición pueden configurarse para alojar una cinta transportadora con aletas. Por ejemplo, la placa de soporte 391, 392 incluye un eje descendido 344 que incluye un conector central 347 que se conecta a una pieza de soporte 345, sobre la cual se dispone un limitador de posición central 50. Las piezas 346 se extienden desde las placas laterales 391, 392 para fijar los limitadores de posición exteriores 50o. Esta configuración deja espacio entre el eje 344 y la cinta 310 para acomodar las aletas 311.
La FIG. 19 muestra otra realización de un limitador de posición de encaje a presión 450. El limitador de posición 450 encaja en un eje configurado para recibir el limitador de posición 450. El limitador de posición está colocado con respecto a un elemento de accionamiento, como una rueda dentada, para crear un canal a través del cual pasa
una cinta transportadora de accionamiento directo. El limitador de posición de encaje a presión 450 de la FIG. 19 tiene una geometría configurada para optimizar el paso del diente motriz de guía a un diente de arrastre intermedio a medida que el diente de arrastre se acopla a la rueda dentada. El limitador de posición de encaje a presión 45 incluye además los huecos 469 en la superficie interior de la abrazadera 462 para facilitar la limpieza.
En la realización de la FIG. 19, el radio R1 de la porción convexa 456 de la superficie limitadora 454 está diseñado para ser más pequeño que el arco de curvatura natural esperado de la cinta asociada en esa posición, que es donde descarga la cinta. El radio R2 en un punto de transición 457 de la superficie limitadora 454 se selecciona de modo que la superficie limitadora se ajuste a la cinta cuando se descarga, asegurando así que la cinta no se doble excesivamente hacia atrás. El radio R3 de la porción cóncava se selecciona de modo que la porción cóncava 455 capture el diente de arrastre inmediatamente posterior que está a punto de acoplarse completamente con la rueda dentada durante el paso. La porción cóncava 455 incluye una extensión tangencial 459, que funciona para controlar el desacople del diente guía de la cinta de la rueda dentada durante el paso, a medida que el diente totalmente acoplado se desacopla. La extensión tangencial 459 puede ser una línea recta, o una forma convexa o cóncava de radio amplio, o incluso una forma que tenga varios radios. El borde de guía 457 puede formar una curva que tenga un radio R4. La curva en el borde de guía 457 está configurada para forzar suavemente un diente motriz hacia atrás en un hueco de la rueda dentada cuando el diente se acerca al limitador 450 en los casos en que el diente pierde la sincronización con el hueco de la rueda dentada.
Las FIGS. 20 y 21 muestran un limitador de posición 550 que incluye un bloqueo de botón para fijar el limitador de posición a un eje 540. El limitador de posición 550 incluye una abrazadera de encaje a presión similar a las realizaciones anteriores, pero también incluye una primera pata 564 conformada que forma un labio para recibir una esquina del eje conformado 540. La primera pata 564 incluye una lengüeta de alineación o bloqueo 571 que ser recibida en una muesca del eje conformado 540. Se puede utilizar cualquier diseño de abrazadera de encaje a presión adecuado para fijar un limitador de posición a un eje.
La FIG. 22 muestra un conjunto de rueda dentada 700 adecuado para usar con un limitador de posición en un sistema de cinta transportadora de accionamiento positivo. El conjunto de rueda dentada 700 incluye una pluralidad de ruedas dentadas encajables a presión dispuestas en un eje motriz 710. Cada rueda dentada 702 comprende un par de componentes de dentados con forma de apóstrofe parcial y con dientes motrices periféricos 722. Dos componentes de la rueda dentada se acoplan entre sí y se disponen en el eje motriz 710 para formar una rueda dentada 702 completa. El eje motriz incluye tres canales 744 que forman chaveteros para recibir los salientes de los componentes de la rueda dentada.
Las FIGS. 23-26 muestran otra realización de un limitador de posición 850 que incluye una superficie limitadora formada por rodillos según otra realización de la invención. El limitador de posición 850 incluye dos placas laterales 852, 853 que forman un cuerpo para montar los rodillos 855, 856, 857 entre ellas. Los rodillos forman una superficie limitadora. El limitador de posición 850 también incluye una abrazadera de encaje a presión 860 debajo de las placas laterales 852, 853 para montar el limitador de posición, como se ha descrito anteriormente. Como se muestra, la abrazadera de encaje a presión 860 comprende un manguito anular que presenta una punta de aletilla 866 y una lengüeta 868, aunque la invención no se limita sólo a eso. La abrazadera de encaje a presión 860 ilustrativa incluye recortes o huecos 869 en la superficie interior de la abrazadera 862 para facilitar la limpieza.
Los rodillos limitadores incluyen un rodillo limitador trasero 855, y dos rodillos limitadores más pequeños 856, 857. Un soporte de rodillo 870 fija los rodillos al cuerpo del limitador. El soporte de rodillo ilustrativo 870 comprende tres ejes 875, 876, 877 que se extienden perpendicularmente a una columna 871 para el montaje de los rodillos. Cada eje se extiende a través de una abertura en la primera placa lateral 853, a través del rodillo correspondiente y a través de una abertura alineada 872, 873 o asiento 874 en la segunda placa lateral 852.
En una realización, los ejes están separados por distancias de separación no iguales, es decir, el eje central 877 está más cerca de uno de los ejes de extremo 875 u 876, lo que asegura que el rodillo más grande no se inserte inadvertidamente en la posición incorrecta.
Un mecanismo de bloqueo bloquea el soporte de rodillo 870 al cuerpo del limitador para fijar el conjunto. En una realización, el mecanismo de bloqueo comprende un brazo flexible 880 conectado a la segunda placa lateral 852 que tiene una lengüeta 881 para acoplar selectivamente una muesca 882 en el eje central 876. El brazo flexible 880 se puede empujar hacia atrás para liberar el eje central 876 y permitir que el soporte de rodillo 870 se deslice fuera del acople con el cuerpo del rodillo. Puede utilizarse cualquier medio adecuado para bloquear un eje en un cuerpo limitador de posición.
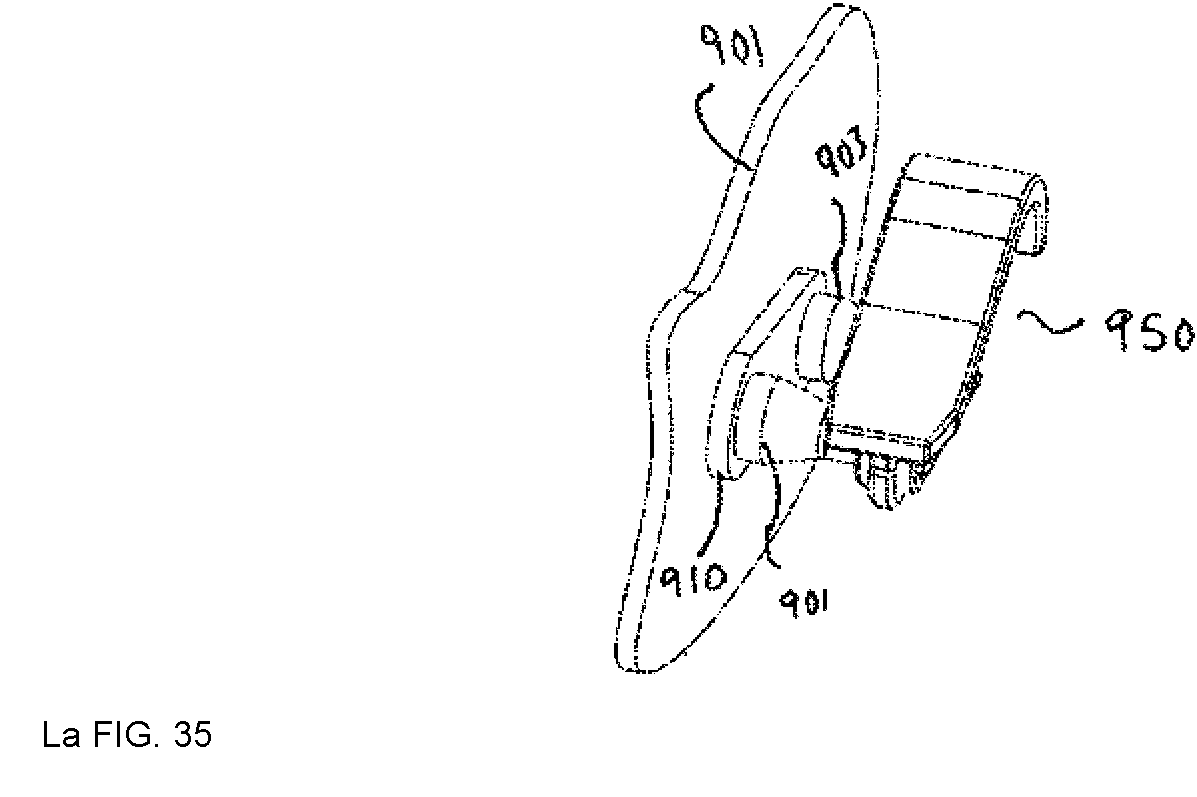
Las FIGS. 27-35 muestran una realización de un limitador de posición para una cinta transportadora que puede montarse a lo largo de un borde de la cinta transportadora según otra realización de la invención. El limitador de posición ilustrativo 950 está montado en un borde interior de un bastidor de transportador 901.
El limitador de posición 950 incluye una superficie limitadora superior 954 para guiar una cinta transportadora. La superficie limitadora superior incluye una porción curva convexa 956 y una porción ligeramente cóncava 955. La superficie limitadora 954 puede tener cualquier tamaño y forma adecuados y no se limita a la realización mostrada. El limitador de posición 950 incluye un cuerpo 952 y un medio de soporte que fija el limitador de posición 950 al bastidor 901. El medio de soporte comprende una primera abertura 962 para recibir un pasador 902 conectado al bastidor. La primera abertura está dispuesta debajo de la porción cóncava 955 de la superficie limitadora. Debajo de la porción convexa 956, el limitador de posición 950 incluye un asiento 963 para otro pasador 903 conectado al bastidor. El asiento 963 ilustrativo es un manguito semianular para recibir la porción superior del pasador 903. Una lengüeta de bloqueo 970 fija el pasador 903 dentro del asiento 963. La lengüeta de bloqueo 970 comprende una porción de brazo flexible que se extiende desde una base que rodea la abertura 962 y un saliente 974 para acoplar una ranura 904 en el pasador 903 para mantener el limitador de posición en su sitio. La lengüeta de bloqueo 970 puede levantarse para sacar el saliente del acoplamiento con el pasador 903 y permitir que el limitador de posición se deslice fuera de los pasadores 902, 903.
Como se muestra, el cuerpo del limitador de posición incluye una superficie inferior conformada 953 para facilitar la limpieza.
Los pasadores ilustrativos 902, 903 incluyen secciones medias cónicas, aunque la invención no está se limita sólo a eso.
Como se muestra en la FIGS. 33 y 34, los pasadores 902, 903 se pueden disponer de forma extraíble en el bastidor 901 a través de las aberturas 907 usando un dispositivo de montaje 908. En otra realización, mostrada en la FIG 35, los pasadores 902, 903 utilizados para montar el limitador de posición 950 en el bastidor 901 pueden disponerse en una base 910 que se conecta entonces al bastidor 901.
Las FIGS. 36A-36D muestran otra realización de un limitador de posición 1050 adecuado para el uso en un transportador. El limitador de posición 1050 incluye una porción abrazadera de encaje a presión 1060 y una porción limitadora, formando una superficie limitadora 1054. La superficie limitadora tiene una nariz redondeada 1057, una porción ligeramente cóncava 1055, una porción recta 1056 y una porción final redondeada 1058 que transiciona a la superficie exterior de la porción de sujeción. En la porción de abrazadera de encaje a presión, una punta 1066 se acopla a un canal 1044 en un eje 1040 correspondiente y una lengüeta 1070 se acopla a una muesca axial en el eje (no mostrada) para sujetar el limitador de posición 1050 en el eje 1040. El limitador de posición 1050 ilustrativo incluye unos recortes 1069 en la superficie interior de la abrazadera para facilitar la limpieza.
En una realización de la invención, se puede utilizar una base del rascador conjuntamente con un limitador de posición para montar un rascador a un eje en el que hay dispuestos uno o más limitadores de posición. Por ejemplo, las FIGS 37A y 37B muestran una base de rascador 1180 montada en un eje 1140 usando una abrazadera de encaje a presión integral. La base del rascador 1180 incluye un pie delantero 1181 que se extiende desde el cuerpo principal de la base del rascador 1180. El pie 1181 incluye un hueco o canal 1182 para recibir una porción de un rascador 1190, como se muestra en las FIGS. 37C y 37d . El rascador 1190 incluye una barra de soporte 1192 configurada para ser insertada en el canal 1182, una base con muelle 1193 y una cuchilla rascadora 1194 montada en un receptáculo de la cuchilla 1195. El soporte del rascador 1180 encaja fácilmente en el eje 1140 y mantiene una cuchilla insertada en el receptáculo de la cuchilla en una posición adecuada, como se describe a continuación.
Las FIGS 38A-38D muestran otra realización de una base del rascador 1293 conectable a un eje a través de un soporte de rascador 1180. La base del rascador 1293 puede incluir una cuchilla rascadora alargada usando múltiples receptáculos de cuchilla 1295. La base del rascador incluye una barra de soporte 1292 que puede insertarse en un hueco del soporte del rascador para montar la base del rascador a un eje. Los receptáculos de la cuchilla comprenden dedos anchos delanteros 1296 y dedos estrechos 1297. Los dedos anchos delanteros 1296 determinan la posición vertical de la cuchilla del rascador. Los dedos estrechos 1297 pellizcan el rascador ya que el grosor del rascador es mayor que el canal formado entre los dedos anchos y estrechos. Al introducir la cuchilla del rascador, los dedos estrechos se desvían ligeramente. En esta posición, el rascador queda firmemente sujeto por fricción.
Las FIGS. 39A y 39B muestran un conjunto de rascador montado en un eje 1140 usando la base del rascador 1293 de las FIGS. 38A y 38B. Como se muestra, un soporte de rascador 1180 está montado en un eje utilizando una abrazadera de encaje a presión integral. El eje 1140 tiene un canal y muescas axiales que se corresponden con la abrazadera de encaje a presión, como se ha descrito antes. Después, una barra de soporte 1292 de una base del rascador 1293 se inserta en un receptáculo 1182 del soporte del rascador. Una cuchilla rascadora 1194 va insertada en los receptáculos de la cuchilla 1295 de la base del rascador.
En otra realización, mostrada en la FIGS 40A y 40B, una base del rascador del conjunto de rascador 1293' incluye un eje ponderado 1250 para facilitar el posicionamiento de una cuchilla del rascador 1294 una vez montada en los
receptáculos 1295. El eje ponderado 1250 sirve como contrapeso para que la base del rascador 1292 pivote dentro de la base para mantener una presión constante de la punta del rascador 1294 contra la cinta.
Como se muestra en la FIGS. 41A y 41B, un soporte de rascador 1280 puede tener discos ponderados 1251 conectados al extremo de la barra de soporte 1252 a través de conectores 1253. Los discos ponderados 1251 sirven como contrapesos para desviar la punta del rascador 1294 contra la cinta.
Las FIGS. 42A es una vista despiezada de un extremo de un bastidor de transportador que incluye el conjunto del limitador de posición y el conjunto del rascador según una realización de la invención. El bastidor del transportador incluye placas de extremo 1301, 1302 para montar un elemento de inversión, como una rueda dentada 1305, para conducir o guiar de otra manera una cinta transportadora 1304. La FIG. 42B es una vista isométrica del extremo de la FIG. 42A montado, sin la rueda dentada ni la cinta transportadora. La FIG. 42C es una vista del extremo del transportador con la rueda dentada y la cinta transportadora en su lugar. El conjunto del limitador de posición 1300 incluye una pluralidad de limitadores de posición 1350 montados en un eje 1340 usando abrazaderas de encaje a presión integrales, como ha descrito antes. También están montados en el eje 1340 una serie de soportes de rascador 1380, que también se han montado utilizando abrazaderas de encaje a presión integrales. El eje ilustrativo 1340 tiene tres soportes de rascador: uno en cada extremo y otro en el centro. En los soportes del rascador 1380 va montado un conjunto de cuchilla del rascador 1370. El conjunto de cuchilla del rascador 1370 incluye una barra de soporte 1392, receptáculos de cuchilla 1393, una cuchilla del rascador 1394 insertada en los receptáculos 1393, soportes de montaje de la placa curvada 1372 conectados a los extremos de la barra de soporte 1392, y manijas 1374 que se extienden hacia fuera desde el soporte de montaje de la placa 1372. El uso de un soporte central para una cuchilla del rascador mejora la uniformidad del rascador contra la superficie de la cinta, mejorando el rascado. El eje 1340 que tiene montados los limitadores de posición 1350 y los soportes del rascador 1380 está montado entre las placas de extremo del transportador 1301, 1302, que sostienen una rueda dentada 1305 u otro elemento de inversión alrededor del cual circula una cinta transportadora 1304. Cuando está montado, el eje 1340 sostiene los limitadores de posición 1350 y la cuchilla del rascador 1394 en posición adyacente a la cinta transportadora 1304.
El conjunto 1300 incluye además casquillos 1303 que se reciben en las aberturas 1307 de las placas de extremo 1301,1302. En un lado exterior, cada casquillo 1303 recibe un saliente 1411 de una manija 1410 En un lado interior, cada casquillo 1303 recibe un extremo del eje 1340. Los casquillos 1303 también incluyen pasadores 1308 que se acoplan a un canal curvado 1412 en la manija 1410 y limitan la rotación de la manija 1410. La rotación de la manija 1410 hace girar el eje 1340.
La manija 1410 puede incluir un pasador excéntrico que encaja a través del casquillo 1303 y es recibido por una ranura 1341 en el eje 1340. A medida que la manija 1410 gira y se bloquea, el pasador bloquea el eje contra un tope firme (ya sea en el bastidor o en el casquillo) al mismo tiempo que la manija también se desvía y encaja a presión en un pasador exterior 1308 no relacionado en el casquillo. En esa posición, se impide que el eje 1340 se mueva hacia atrás.
Las FIGS. 43A-43C muestran la porción de extremo del bastidor de las FIGS 42A-C con la manija 1410 en una primera posición. La FIG. 43B es una vista en sección transversal a través de las líneas A-A de la FIG. 43A. Con la manija 1410, el conjunto del limitador de posición 1300 y el conjunto de la cuchilla del rascador 1370 estarán en una primera posición, colocando la superficie limitadora de los limitadores de posición 1350 y la cuchilla del rascador 1394 adyacentes a la cinta transportadora 1304 en un modo operativo. Si la cuchilla del rascador está fijada, un contrapeso fuerza la cuchilla del rascador contra la cinta.
Las FIGS. 44A-44C muestran la porción de extremo del bastidor con la manija 1410 en una segunda posición. En esta posición, la manija 1410 gira 180° desde la primera posición. Debido a que la manija 1410 está unida al eje 1340 con un pasador desplazado 1342, la rotación de la manija 1410 empuja el eje 1340 y los componentes unidos 1350, 1380 ligeramente hacia adelante y lejos de la cinta 1340. El limitador de posición sigue estando en una posición operativa. Si se instala un rascador, el contrapeso del conjunto del rascador puede disponerse para proporcionar un espacio considerable entre el rascador y la cinta y un pequeño espacio entre el limitador y la cinta, de modo que pueda realizarse alguna tarea de limpieza durante el funcionamiento, si es necesario.
Las FIGS. 45A-45C muestran la porción de extremo del bastidor con la manija 1410 en la segunda posición y los soportes 1372 del conjunto de la cuchilla del rascador movidos para liberar la cuchilla 1394. En esta posición, la manija 1374 y los soportes 1372 del conjunto de la cuchilla del rascador 1370, liberados por la manija 1410, giran alrededor de la barra de soporte 1392 para empujar la cuchilla 1394 lejos de la cinta. Esto permite la extracción de la cuchilla 1394 para su limpieza u otros fines o el funcionamiento de la cinta sin rascado.
La manija 1410 desbloqueada puede retirarse del conjunto. Cuando se retira la manija 1410, el eje 1340 puede moverse hacia adelante dentro de las aberturas 1307 y pivotar hacia abajo, exponiendo una superficie diferente a la cinta transportadora. En esta posición, los limitadores pueden soportar cargas ligeras de modo que la cinta pueda
ser accionada durante la operación de limpieza. Además, el eje y los limitadores pueden pivotar hacia arriba y retirarse de la cinta transportadora.
El conjunto ilustrativo de la cuchilla del rascador 1370 permite acoplar y retirar fácilmente una cuchilla del rascador de una cinta transportadora sin necesidad de herramientas. El conjunto de la cuchilla del rascador empuja automáticamente la cuchilla hacia la cinta transportadora en el acople con la cinta transportadora y proporciona una presión de rascado uniforme. El limitador de posición facilita el montaje, desmontaje, funcionamiento y limpieza de un transportador. El limitador de posición puede encajarse fácilmente en un eje diseñado para alojar el limitador de posición y puede retirarse cuando sea necesario para la limpieza o sustitución. El limitador de posición puede aumentar el enrollamiento de una cinta transportadora y posicionarse ventajosamente lejos de una corriente de producto. Además, las realizaciones ilustrativas disponen el limitador de posición en relación con un eje de montaje de una manera que aumenta la robustez del limitador de posición. El limitador de posición se dispone de tal manera que las fuerzas reactivas de la cinta se transmiten compresivamente a través del cuerpo de plástico a un eje, que puede ser de acero inoxidable, para aumentar la vida útil del limitador de posición y/o las cargas que la cinta es capaz de transportar.
La invención no está limitada a las realizaciones ilustrativas descritas más arriba, sino por el alcance de las reivindicaciones adjuntas.
Claims (18)
1. Un limitador de posición (50; 150; 250; 450; 550; 850; 1050) para un transportador de accionamiento directo que comprende:
una cinta sin fin (10);
al menos una rueda dentada motriz (20) para engranar y accionar la cinta sin fin (10), teniendo la rueda dentada accionadores espaciados en un paso de rueda dentada seleccionado;
un primer eje (40; 140) dispuesto debajo de la rueda dentada motriz (20);
el limitador de posición está montado en uso en el eje (40) mediante una abrazadera de encaje a presión de manera que una superficie limitadora del limitador de posición está orientada hacia la cinta sin fin para asegurar el acoplamiento entre la rueda dentada motriz y la cinta sin fin sin aumentar la tensión en toda la cinta;
donde el limitador de posición (50; 150; 1050) comprende:
un cuerpo (52)
una superficie limitadora (54; 1054) que se extiende en un primer extremo del cuerpo; y
una abrazadera de encaje a presión (60; 160; 1060) en un segundo extremo del cuerpo para montar el cuerpo al eje (40);
donde la abrazadera de encaje a presión (60; 160; 1060) comprende un elemento de agarre sustancialmente semicircular que forma una primera pata curvada (64) que termina en una superficie de extremo plana (69) y una segunda pata curvada (65) que termina en una punta de aletilla (66, 1066) estando definida la abrazadera de encaje a presión por una superficie radialmente exterior (61), una superficie radialmente interior (62), superficies laterales (63), la punta de aletilla que tiene una superficie de punta angulada exterior (67) y una superficie de punta interior (68), que se intercalan para formar la aleta, donde la superficie de punta interior (68) se extiende radialmente hacia dentro desde la superficie radialmente interior (62);
donde el eje comprende un canal (44) para acoplar con la punta de aletilla (66); y
donde el limitador de posición está dispuesto en relación con la rueda dentada (20) para crear un canal a través del cual pasa la cinta.
2. El limitador de posición de la reivindicación 1, donde la abrazadera de encaje a presión (60; 160) comprende además una lengüeta de encaje a presión (70) que se extiende entre la punta y la superficie radialmente interior (62) de la segunda pata curva (65).
3. El limitador de posición de la reivindicación 2, donde una lengüeta de alineación axial (70) se extiende entre la punta (66) y la superficie radialmente interior de la segunda pata curva (65) para encajar en una muesca de acoplamiento (41) en el eje (40).
4. El limitador de posición de la reivindicación 1 o reivindicación 2, donde a) la superficie limitadora (54) incluye una porción cóncava (55) y una porción convexa (56); o b) la superficie limitadora (54) incluye una porción cóncava (55) y una porción convexa (56) y donde la porción convexa (56) tiene una curva más pronunciada que la porción cóncava (55).
5. El limitador de posición de la reivindicación 1 o reivindicación 2, donde a) la superficie limitadora comprende un primer rodillo (156) montado giratoriamente al cuerpo y un segundo rodillo (155) montado giratoriamente al cuerpo y separado del primer rodillo (156) por una distancia seleccionada; o b) la superficie limitadora comprende un primer rodillo (156) montado giratoriamente al cuerpo y un segundo rodillo (155) montado giratoriamente al cuerpo y separado del primer rodillo (156) por una distancia seleccionada, y en donde el cuerpo comprende dos placas laterales (152, 153) que flanquean el primer rodillo (156) y el segundo rodillo (155), y el limitador de posición (150) incluye además un primer eje (158) que se extiende a través del primer rodillo (156) y dentro de aberturas en las placas laterales y un segundo eje (157) que se extiende a través del segundo rodillo (155) y dentro de aberturas en las placas laterales; o c) la superficie limitadora comprende un primer rodillo (156) montado giratoriamente al cuerpo y un segundo rodillo (155) montado giratoriamente al cuerpo y separado del primer rodillo (156) por una distancia seleccionada, y donde el primer rodillo (156) tiene un diámetro menor que el segundo rodillo (155).
6. El limitador de posición de la reivindicación 1 o reivindicación 2, la superficie limitadora comprende un primer rodillo (156) montado giratoriamente al cuerpo y un segundo rodillo (155) montado giratoriamente al cuerpo y separado del primer rodillo (156) por una distancia seleccionada, y donde el cuerpo comprende dos placas laterales (152, 153) que flanquean el primer rodillo (156) y el segundo rodillo (155), y el limitador de posición incluye además un primer eje (158) que se extiende a través del primer rodillo (156) y dentro de aberturas en las placas laterales y
un segundo eje (157) que se extiende a través del segundo rodillo (155) y dentro de aberturas en las placas laterales, y que comprende además medios para bloquear el primer y segundo eje (158, 157) en su lugar.
7. El limitador de posición de la reivindicación 1 o reivindicación 2, donde el diámetro interior de la primera y segunda patas curvas (64, 65) es menor que el diámetro exterior del eje (40), de modo que la abrazadera de encaje a presión (60; 160) se mantiene tensada cuando está en posición de sujeción.
8. El limitador de posición de la reivindicación 1 o reivindicación 2, donde la primera y segunda patas curvas (64, 65) contienen huecos en una superficie interior (62) para acomodar la limpieza y permitir la fabricación con tolerancias más holgadas mientras se dirige la presión de sujeción a la punta (66) y al extremo de la primera pata curva (64).
9. El limitador de posición de la reivindicación 1 o reivindicación 2, donde la primera pata curva (64) incluye un saliente en la periferia interior del extremo distal de la pata para acoplarse con una geometría específica en el eje (40) cuando está dispuesto en la posición de sujeción.
10. El limitador de posición de la reivindicación 1 o reivindicación 2, donde la primera pata curva (64) se extiende con un diámetro interior aumentado hacia la segunda pata curva (65) de manera que las patas juntas inhiben la extracción del eje (40) cuando está en una posición no sujeta.
11. El limitador de posición de la reivindicación 1 o reivindicación 2, donde la primera pata curva (64) se extiende con un diámetro interior para conectar con la segunda pata curva (65) de manera que las patas juntas impiden la extracción del eje (40) cuando está en una posición no sujeta.
12. El limitador de posición de la reivindicación 1 o reivindicación 2, donde el limitador de posición (250) comprende además un brazo rascador (220) que se extiende hacia delante desde dicho cuerpo, incluyendo el brazo rascador un hueco para alojar un rascador (231; 232; 233; 234).
13. El limitador de posición de la reivindicación 12, que comprende además un rascador (231; 232; 233; 234) insertado en el hueco.
14. El limitador de posición de la reivindicación 1 o reivindicación 2, donde el limitador de posición (1050) tiene una nariz redondeada (1057) en un extremo de la superficie limitadora (1054).
15. El limitador de posición de la reivindicación 1, donde la abrazadera de encaje a presión comprende un asiento (963) para recibir una porción superior del eje y una lengüeta flexible (970) para retener el eje dentro del asiento (963).
16. El limitador de posición de la reivindicación 15, donde la lengüeta flexible (970) incluye un saliente (974) y el eje incluye una ranura (904) para recibir el saliente (974) para fijar el limitador de posición (950) al eje (903).
17. Un transportador de accionamiento directo que comprende:
una cinta sin fin (10);
al menos una rueda dentada motriz (20) para engranar y accionar la cinta sin fin (10), teniendo la rueda dentada accionadores espaciados en un paso de rueda dentada seleccionado;
un primer eje (40; 140) dispuesto debajo de la rueda dentada motriz (20);
caracterizado porque un limitador de posición (50; 150; 250; 450; 550; 850; 1050) según cualquiera de las reivindicaciones 1 a 16 está montado en el eje (40; 140) mediante su abrazadera de encaje a presión (60; 160; 1060) de tal manera que la superficie limitadora (54; 1054) del limitador de posición (50; 150; 250; 450; 550; 850; 1050) está orientada hacia la cinta sin fin (10) para asegurar el acoplamiento entre la rueda dentada motriz (20) y la cinta sin fin (10) sin aumentar la tensión en toda la cinta;
donde el eje comprende un canal (44) para acoplar con la punta de aletilla (66); y donde el limitador de posición está dispuesto con respecto a la rueda dentada (20) para crear un canal a través del cual pasa la cinta.
18. El uso de un limitador de posición (50; 150; 250; 450; 550; 850; 1050) según cualquiera de las reivindicaciones 1 a 16 en un transportador según la reivindicación 17.






















Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461931058P | 2014-01-24 | 2014-01-24 | |
| US201462006427P | 2014-06-02 | 2014-06-02 | |
| US201462061346P | 2014-10-08 | 2014-10-08 | |
| PCT/US2015/012385 WO2015112674A1 (en) | 2014-01-24 | 2015-01-22 | Snap-on position limiter for a conveyor belt |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| ES2955496T3 true ES2955496T3 (es) | 2023-12-01 |
Family
ID=53678355
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| ES15740222T Active ES2955496T3 (es) | 2014-01-24 | 2015-01-22 | Limitador de posición de encaje a presión para una cinta transportadora |
Country Status (11)
| Country | Link |
|---|---|
| US (2) | US9296565B2 (es) |
| EP (1) | EP3097030B1 (es) |
| JP (2) | JP6301485B2 (es) |
| CN (1) | CN106414279B (es) |
| AU (1) | AU2015209394B2 (es) |
| BR (1) | BR112016017103B1 (es) |
| CA (1) | CA2935726C (es) |
| DK (1) | DK3097030T3 (es) |
| ES (1) | ES2955496T3 (es) |
| PL (1) | PL3097030T3 (es) |
| WO (1) | WO2015112674A1 (es) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2716149T3 (es) * | 2013-09-18 | 2019-06-10 | Flexlink Ab | Soporte de cadena de transportador |
| US9527672B2 (en) * | 2014-01-24 | 2016-12-27 | Laitram, L.L.C. | Cleanable conveyor frame assembly including snap-on components |
| US10077156B2 (en) | 2014-01-24 | 2018-09-18 | Laitram, L.L.C. | Snap-on position limiter for a conveyor belt |
| DE102014109157A1 (de) * | 2014-06-30 | 2015-12-31 | Sig Technology Ag | Vorrichtung zum Transport von Gegenständen |
| WO2016160394A1 (en) * | 2015-03-30 | 2016-10-06 | Laitram, L.L.C. | Method of manufacturing a multi-material conveyor component |
| AU2016252635B2 (en) | 2015-04-23 | 2020-03-19 | Laitram, L.L.C. | Infeed and outfeed assemblies for a conveyor |
| ES3027192T3 (en) * | 2015-06-29 | 2025-06-13 | Laitram Llc | Self-biasing scraper for a conveyor belt |
| US10605347B2 (en) * | 2015-09-16 | 2020-03-31 | Reell Precision Manufacturing Corporation | Ring clip assembly |
| CN105314331A (zh) * | 2015-11-27 | 2016-02-10 | 南通恒康数控机械有限公司 | 一种海绵输送带防打滑机构 |
| DE102015122150A1 (de) * | 2015-12-17 | 2017-06-22 | Stadler Anlagenbau Gmbh | Umlenkvorrichtung für Fördergurte |
| US10017325B2 (en) * | 2016-03-21 | 2018-07-10 | Kamran Ramezani | Hollow shaft direct drive motor |
| JP6924209B2 (ja) * | 2016-05-24 | 2021-08-25 | レイトラム,エル.エル.シー. | コンベヤベルト用の位置リミッタ組立体 |
| ES3008662T3 (en) | 2016-09-21 | 2025-03-24 | Laitram Llc | Infeed and outfeed assemblies for a conveyor |
| CN110072786B (zh) * | 2016-12-12 | 2021-07-20 | 莱特拉姆有限责任公司 | 用于输送带的卡合限位器 |
| US11032974B2 (en) * | 2017-02-24 | 2021-06-15 | Deere & Company | External belt guide for round baler |
| US11039575B2 (en) * | 2017-02-24 | 2021-06-22 | Deere & Company | External belt guide for round baler |
| US10407245B2 (en) * | 2017-11-16 | 2019-09-10 | Laitram, L.L.C. | Continuous product-processing apparatus and method for cleaning with product repositioning |
| CN109878965A (zh) * | 2017-12-06 | 2019-06-14 | 章春根 | 吊挂式智能立体存取系统 |
| DE102018204043A1 (de) * | 2018-03-16 | 2019-09-19 | Multivac Sepp Haggenmüller Se & Co. Kg | Transportvorrichtung mit Verriegelungsmechanismus |
| CN111712450A (zh) * | 2018-03-22 | 2020-09-25 | 莱特拉姆有限责任公司 | 用于带挡板传送带的位置限制器 |
| DE102018222579B4 (de) * | 2018-12-20 | 2020-07-02 | Multivac Marking & Inspection Gmbh & Co. Kg | Endlosfördervorrichtung mit entnehmbarer Fördereinheit und Verfahren |
| US11952219B2 (en) * | 2019-05-20 | 2024-04-09 | Laitram, L.L.C. | Drive assembly for a conveyor |
| CN110482122B (zh) * | 2019-08-30 | 2021-02-09 | 征图新视(江苏)科技股份有限公司 | 一种振动叉针循环结构 |
| WO2021077049A2 (en) * | 2019-10-18 | 2021-04-22 | Georgia Tech Research Corporation | Drive belt with surface texture for minimizing vibrations |
| FR3118765B1 (fr) * | 2021-01-13 | 2023-04-14 | Aktid | Dispositif de convoyage et de tri de matière à rive structurelle |
| CN113814518A (zh) * | 2021-09-28 | 2021-12-21 | 特亿智能科技(苏州)有限公司 | 一种串焊机用上料输送机构 |
| US20260008628A1 (en) * | 2024-07-03 | 2026-01-08 | Flexible Steel Lacing Company | Guide pin receiving device for conveyor belt cartridge cleaner |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US704388A (en) * | 1902-02-05 | 1902-07-08 | George A Schwingel | Belt-tightener. |
| US832361A (en) * | 1905-12-20 | 1906-10-02 | Levi B Blevins | Conveyer-belt tightener for harvesters. |
| US1913040A (en) * | 1931-08-03 | 1933-06-06 | Gleaner Harvester Corp | Chain tightener |
| FR1127925A (fr) * | 1955-06-13 | 1956-12-27 | Dispositif de nettoyage de bandes de transport de produits en vrac | |
| US3015381A (en) * | 1957-02-14 | 1962-01-02 | Mohwinkel | Belt conveyors |
| US3436979A (en) * | 1967-01-23 | 1969-04-08 | Victor D Molitor | Endless belt installation including belt tightening device |
| US3656610A (en) * | 1970-07-15 | 1972-04-18 | Material Control Inc | Resiliently mounted conveyor belt cleaner |
| JPS4835659Y1 (es) * | 1970-12-07 | 1973-10-26 | ||
| US3921793A (en) * | 1974-07-08 | 1975-11-25 | Goodman Sigmund | Reversible belt tensioning system |
| JPS5536856B2 (es) * | 1975-02-22 | 1980-09-24 | ||
| US4279449A (en) * | 1978-07-20 | 1981-07-21 | The Goodyear Tire & Rubber Company | Slide surface compound for track-driven vehicle |
| JPS57171152A (en) * | 1981-04-15 | 1982-10-21 | Honda Motor Co Ltd | Tensioner of transmission pitch in winding transmission |
| US4492304A (en) * | 1981-12-14 | 1985-01-08 | Fmc Corporation | Conveyor chain retainer shoe |
| US4489823A (en) * | 1982-08-09 | 1984-12-25 | Gordon James R | Scraper blade for a belt conveyor |
| JPS6048817A (ja) * | 1983-08-29 | 1985-03-16 | Fuji Xerox Co Ltd | ベルト式搬送装置 |
| GB8332611D0 (en) * | 1983-12-07 | 1984-01-11 | Dowty Meco Ltd | Belt conveyor |
| US4721495A (en) * | 1985-09-01 | 1988-01-26 | Nippon Seiko Kabushiki Kaisha | Autotensioner |
| DE3644934A1 (de) * | 1986-03-12 | 1988-04-28 | Vsr Eng Foerdertechnik | Montagevorrichtung fuer abstreifvorrichtung zum reinigen von foerderbaendern |
| US4803804A (en) * | 1987-09-14 | 1989-02-14 | Bryant Charles B | Telescopic belt tightener |
| US5190145A (en) * | 1990-11-09 | 1993-03-02 | Valu Engineering, Inc. | Apparatus for supporting conveyor belts |
| US5310047A (en) * | 1992-11-06 | 1994-05-10 | Valu Engineering, Inc. | Reversible conveyor return guide shoe |
| US5632915A (en) * | 1994-08-29 | 1997-05-27 | Gerber Garment Technology, Inc. | Laser material processing apparatus and a work table therefor |
| CN1220640A (zh) * | 1996-04-02 | 1999-06-23 | 斯科皮奥输送机产品(私人)有限公司 | 循环传送机的动力输出装置 |
| US5984083A (en) * | 1997-03-10 | 1999-11-16 | Dorner Mfg. Corp. | Conveyor belt tensioning mechanism utilizing a manually operated cam-type tool |
| US6109427A (en) * | 1998-01-19 | 2000-08-29 | Dorner Mfg. Corp. | Conveyor construction |
| US6986418B2 (en) | 1998-12-10 | 2006-01-17 | Martin Engineering Company | Conveyor belt cleaner scraper blade with sensor and control system therefor |
| US6948609B2 (en) * | 2000-03-23 | 2005-09-27 | Asgco Manufacturing, Inc. | Light duty belt cleaning system |
| JP4167472B2 (ja) * | 2002-01-28 | 2008-10-15 | マルヤス機械株式会社 | ベルトコンベア |
| JP3848578B2 (ja) * | 2002-01-30 | 2006-11-22 | マルヤス機械株式会社 | ベルトコンベア |
| AU2003224870A1 (en) | 2002-04-12 | 2003-10-27 | Appleton Control Systems, Inc. | Belt tensioning assembly |
| US6960145B2 (en) * | 2002-08-30 | 2005-11-01 | Trw, Inc. | Belt tensioner for electric power steering unit |
| ATE397557T1 (de) * | 2002-11-05 | 2008-06-15 | Maruyasu Kikai Kk | Bandförderer |
| EP1493692B1 (de) * | 2003-07-01 | 2006-12-20 | Habasit AG | Vorrichtung zum Strecken und Lösen eines über Umlenkmittel geführten endlosen Transportbandes |
| JP2005260117A (ja) * | 2004-03-15 | 2005-09-22 | Juki Corp | 電子部品供給装置 |
| US7040480B2 (en) * | 2004-07-19 | 2006-05-09 | Laitram, L.L.C. | Zero back pressure conveyor |
| US20060049023A1 (en) * | 2004-09-09 | 2006-03-09 | Dietsch Phillip E | Rotary conveyor belt cleaner |
| CA2805777C (en) | 2005-01-19 | 2016-04-12 | Thermodrive Llc. | Low friction, direct drive conveyor belt |
| US7131531B1 (en) * | 2005-05-18 | 2006-11-07 | Laitram, L.L.C. | Roller shoes in modular-belt conveyors |
| US7681719B2 (en) * | 2005-07-21 | 2010-03-23 | Dorner Mfg. Corp. | Sanitary conveyor transfer tail assembly |
| US8167114B2 (en) * | 2008-01-03 | 2012-05-01 | Souhel Khanania | System and method for product removal |
| MX2011002545A (es) * | 2008-09-09 | 2011-04-05 | Martin Bulk Handling Solutions Proprietary Ltd | Un raspador de banda. |
| CN102001509B (zh) * | 2009-08-31 | 2013-04-24 | 深圳富泰宏精密工业有限公司 | 输送装置 |
| US8973739B2 (en) | 2010-12-23 | 2015-03-10 | Flexible Steel Lacing Company | Belt cleaner system and method |
| US8469182B2 (en) * | 2011-09-09 | 2013-06-25 | Felice S.R.L. | Quick-remove conveyor belt, in particular for transporting food products to a packaging station |
| CN203064715U (zh) * | 2013-01-25 | 2013-07-17 | 杭州国电大力机电工程有限公司 | 一种胶带机刮刀装置 |
| CN203359390U (zh) * | 2013-06-28 | 2013-12-25 | 宁波圣瑞思服装机械有限公司 | 用于智能服装生产系统的拐弯输送线结构 |
-
2015
- 2015-01-22 ES ES15740222T patent/ES2955496T3/es active Active
- 2015-01-22 CN CN201580005300.1A patent/CN106414279B/zh active Active
- 2015-01-22 US US14/602,455 patent/US9296565B2/en active Active
- 2015-01-22 AU AU2015209394A patent/AU2015209394B2/en active Active
- 2015-01-22 CA CA2935726A patent/CA2935726C/en active Active
- 2015-01-22 PL PL15740222.3T patent/PL3097030T3/pl unknown
- 2015-01-22 DK DK15740222.3T patent/DK3097030T3/da active
- 2015-01-22 EP EP15740222.3A patent/EP3097030B1/en active Active
- 2015-01-22 BR BR112016017103-9A patent/BR112016017103B1/pt active IP Right Grant
- 2015-01-22 JP JP2016546825A patent/JP6301485B2/ja active Active
- 2015-01-22 WO PCT/US2015/012385 patent/WO2015112674A1/en not_active Ceased
-
2016
- 2016-02-22 US US15/049,312 patent/US9555971B2/en active Active
-
2018
- 2018-02-26 JP JP2018031511A patent/JP6469911B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20160167884A1 (en) | 2016-06-16 |
| US9555971B2 (en) | 2017-01-31 |
| BR112016017103A2 (es) | 2017-10-03 |
| JP2018108895A (ja) | 2018-07-12 |
| EP3097030A4 (en) | 2017-12-13 |
| EP3097030A1 (en) | 2016-11-30 |
| BR112016017103B1 (pt) | 2022-04-05 |
| JP6301485B2 (ja) | 2018-03-28 |
| AU2015209394A1 (en) | 2016-07-07 |
| AU2015209394B2 (en) | 2019-07-18 |
| DK3097030T3 (da) | 2023-10-02 |
| CA2935726C (en) | 2022-11-29 |
| EP3097030B1 (en) | 2023-09-13 |
| CA2935726A1 (en) | 2015-07-30 |
| JP6469911B2 (ja) | 2019-02-13 |
| JP2017510522A (ja) | 2017-04-13 |
| CN106414279B (zh) | 2019-04-23 |
| PL3097030T3 (pl) | 2023-11-20 |
| US9296565B2 (en) | 2016-03-29 |
| WO2015112674A1 (en) | 2015-07-30 |
| CN106414279A (zh) | 2017-02-15 |
| US20150210475A1 (en) | 2015-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2955496T3 (es) | Limitador de posición de encaje a presión para una cinta transportadora | |
| US10427880B2 (en) | Snap-on position limiter for a conveyor belt | |
| CN103402896B (zh) | 输送装置 | |
| US11332318B2 (en) | Infeed and outfeed assemblies for a conveyor | |
| ES2880465T3 (es) | Ensamblaje del marco del transportador que se puede limpiar que incluye componentes a presión | |
| ES2910704T3 (es) | Conjuntos de entrada y salida para un transportador | |
| CN110072786B (zh) | 用于输送带的卡合限位器 | |
| ES2912104T3 (es) | Eslabón de cinta transportadora con elemento de retención de barra | |
| MX2010004990A (es) | Perfil de banda y banda perfilada. | |
| ES2989202T3 (es) | Limitador de posición para cinta transportadora con tramos |