FR3061780A1 - Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant - Google Patents
Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant Download PDFInfo
- Publication number
- FR3061780A1 FR3061780A1 FR1750285A FR1750285A FR3061780A1 FR 3061780 A1 FR3061780 A1 FR 3061780A1 FR 1750285 A FR1750285 A FR 1750285A FR 1750285 A FR1750285 A FR 1750285A FR 3061780 A1 FR3061780 A1 FR 3061780A1
- Authority
- FR
- France
- Prior art keywords
- importance
- motor vehicle
- objects
- display
- level
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
- Instrument Panels (AREA)
Abstract
L'invention concerne un procédé de pilotage d'un afficheur (16) visible par le conducteur d'un véhicule automobile (10), qui comporte des étapes : - d'acquisition d'au moins une image de l'environnement du véhicule automobile, - de détection d'objets (50, 51, 52, 53) situés dans l'environnement du véhicule automobile, - de détermination d'un niveau d'importance pour chaque objet détecté, - de calcul, compte tenu de l'image acquise, d'un coefficient de visibilité pour une partie au moins des objets détectés, et - de commande de l'afficheur de façon à ce qu'il mette en exergue uniquement les objets dont les coefficients de visibilité sont inférieurs à un seuil de visibilité et dont les niveaux d'importance sont supérieurs à un seuil d'importance.
Description
Titulaire(s) : VALEO SCHALTER UND SENSOREN GMBH Société par actions simplifiée.
O Demande(s) d’extension :
® Mandataire(s) : VALEO COMFORT AND DRIVING ASSISTANCE.
FR 3 061 780 - A1 ® PROCEDE DE PILOTAGE D'UN AFFICHEUR CORRESPONDANT.
@) L'invention concerne un procédé de pilotage d'un afficheur (16) visible par le conducteur d'un véhicule automobile (10), qui comporte des étapes:
- d'acquisition d'au moins une image de l'environnement du véhicule automobile,
- de détection d'objets (50, 51,52, 53) situés dans l'environnement du véhicule automobile,
- de détermination d'un niveau d'importance pour chaque objet détecté,
- de calcul, compte tenu de l'image acquise, d'un coefficient de visibilité pour une partie au moins des objets détectés, et
- de commande de l'afficheur de façon à ce qu'il mette en exergue uniquement les objets dont les coefficients de visibilité sont inférieurs à un seuil de visibilité et dont les niveaux d'importance sont supérieurs à un seuil d'importance.
DE VEHICULE AUTOMOBILE, ET AFFICHEUR

PROCEDE DE PILOTAGE D’UN AFFICHEUR DE VEHICULE AUTOMOBILE, ET AFFICHEUR CORRESPONDANT
Domaine technique auquel se rapporte l'invention
La présente invention concerne de manière générale les aides à la conduite de véhicules automobiles.
Elle concerne plus particulièrement un procédé de pilotage d’un afficheur visible par le conducteur d’un véhicule automobile, typiquement d’un afficheur tête-haute ou d’un écran d’affichage.
ARRIERE-PLAN TECHNOLOGIQUE
Pour faciliter et rendre plus sûre la conduite d’un véhicule automobile, on souhaite éviter que le conducteur ne soit forcé de détourner son regard de la route qu’il emprunte.
Pour cela, il est connu d’utiliser un afficheur tête-haute, adapté à projeter des informations à la hauteur du regard du conducteur.
La variété d’informations susceptibles d’être projetées dans le champ de vision du conducteur est si grande qu’il faut sélectionner celles qui semblent les plus utiles au conducteur.
En effet, il est possible d’afficher des informations relatives au fonctionnement du véhicule (vitesse, niveau d’essence, vitesse de régulation automatique...), des informations de guidage (route à suivre, distance du prochain embranchement, nom de la route empruntée ...), ou encore des informations de sécurité (vitesse limite, risque d’embouteillage proche...). II est également connu, lorsqu’un obstacle est détecté, d’afficher un rectangle autour de cet obstacle afin d’attirer l’attention du conducteur sur cet obstacle de manière à ce que le conducteur puisse réagir dans les meilleures conditions de sécurité.
Actuellement, seules quelques rares informations sont sélectionnées pour être projetées dans le champ de vision du conducteur afin de ne pas surcharger le conducteur d’informations et de ne pas le perturber dans sa conduite. Parmi ces informations, lorsqu’un obstacle est détecté à proximité, on affiche systématiquement un rectangle autour de cet obstacle.
Objet de l’invention
Afin de ne pas surcharger le conducteur d’informations, la présente invention propose un nouveau procédé de pilotage d’un afficheur (écran d’affichage ou afficheur tête-haute), comportant des étapes :
- d’acquisition d’au moins une donnée représentative de l’environnement du véhicule automobile (typiquement une image de cet environnement),
- de détection d’objets situés dans l’environnement du véhicule automobile,
- de détermination d’un niveau d’importance pour une partie au moins des objets détectés,
- de calcul, compte tenu de la donnée acquise, d’un coefficient de visibilité pour une partie au moins des objets détectés, et
- de commande de l’afficheur de façon à ce qu’il mette en exergue uniquement les objets dont les coefficients de visibilité sont inférieurs à un seuil de visibilité et dont les niveaux d’importance sont supérieurs à un seuil d’importance.
Ainsi, grâce à l’invention, seuls les objets qui sont jugés non seulement importants pour la conduite du véhicule en toute sécurité, mais en outre peu visibles par le conducteur sont mis en valeur.
De cette manière, un obstacle détecté ne sera pas systématiquement mis en valeur, ce qui évitera de surcharger le conducteur d’informations. Ainsi le conducteur pourra-t-il se concentrer plus facilement sur sa conduite.
D’autres caractéristiques avantageuses et non limitatives du procédé conforme à l’invention sont les suivantes :
- le niveau d’importance de chaque objet est déterminé en fonction au moins de la forme dudit objet, ladite forme étant obtenue sur la base de ladite donnée acquise ;
- il est prévu de déterminer, en fonction au moins de la forme de chaque objet, si chaque objet est ou non une infrastructure routière, et un niveau d’importance supérieur au seuil d’importance est affecté à chaque objet qui est considéré comme une infrastructure routière et qui est situé à une distance du véhicule automobile inférieure à un seuil de distance ;
- ladite donnée est une image acquise par un capteur d’images orienté vers l’avant du véhicule automobile ;
- le niveau d’importance de chaque objet est déterminé en fonction au moins de la position dudit objet sur plusieurs images successivement acquises ;
- la trajectoire de chaque objet est déterminée en fonction de la position dudit objet sur plusieurs images successivement acquises et un niveau d’importance supérieur au seuil d’importance est affecté à chaque objet qui est mobile et dont la trajectoire coupe celle du véhicule automobile ;
- à l’étape de commande, chaque objet mis en exergue est illuminé sur une partie au moins de son contour ;
- la couleur et/ou l’intensité lumineuse de l’illumination est déterminée en fonction du coefficient de visibilité et/ou du niveau d’importance ;
- à l’étape de détection, chaque objet est détecté en fonction au moins des données contenues dans l’image acquise ;
- à l’étape de détection, il est prévu d’acquérir des données relatives à l’environnement du véhicule automobile au moyen d’un second capteur qui équipe le véhicule automobile et qui est distinct du capteur qui acquiert chaque donnée, et chaque objet est détecté en fonction au moins des données acquises par ledit second capteur ; et
- le coefficient de visibilité de chaque de objet est déterminé en fonction du contraste dudit objet par rapport à la partie au moins de l’image située autour dudit objet.
L’invention propose également un afficheur comportant des moyens de génération d’images et une unité de calcul et de pilotage desdits moyens de génération d’images qui est adaptée à mettre en œuvre un procédé de pilotage tel que précité.
Description detaillee d’un exemple de réalisation
La description qui va suivre en regard des dessins annexés, donnés à titre d’exemples non limitatifs, fera bien comprendre en quoi consiste l’invention et comment elle peut être réalisée.
Sur les dessins annexés :
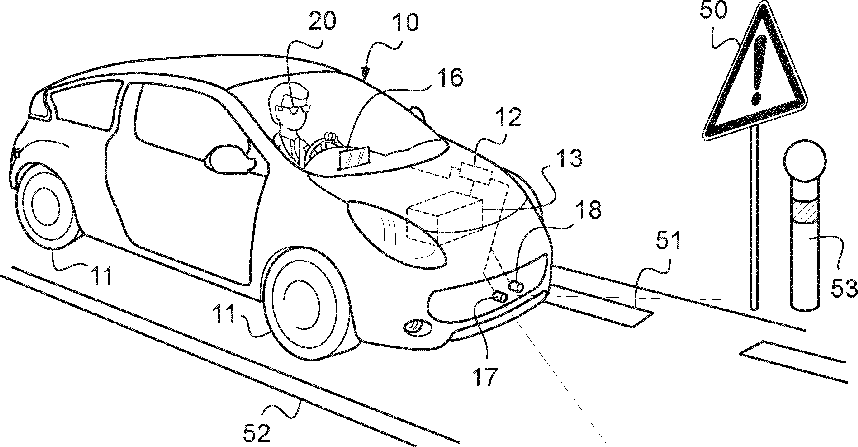
- la figure 1 est une vue schématique en perspective d’un véhicule automobile roulant sur une route ;
- la figure 2 est une représentation schématique d’une image acquise par un capteur d’images équipant le véhicule automobile de la figure 1 ; et
- la figure 3 est une représentation schématique d’une image affichée par un afficheur tête- haute équipant le véhicule automobile de la figure 1.
Sur la figure 1, on a représenté un véhicule automobile 10 qui se présente ici sous la forme d’une voiture à quatre roues 11. En variante, il pourrait s’agir d’un véhicule automobile comprenant trois roues, ou davantage de roues.
Classiquement, ce véhicule automobile 10 comporte un châssis qui supporte notamment un groupe motopropulseur 13, des éléments de carrosserie et des éléments d’habitacle.
Le véhicule automobile 10 comprend également une ou plusieurs unité(s) électronique(s) de commande (ou ECU, de l’anglais Electronic Control Unit). On considérera ici, pour la simplicité de l’exposé, qu’il n’en comporte qu’une seule, appelée calculateur 12.
Ce calculateur 12 comprend un processeur et une unité de mémorisation, par exemple une mémoire non-volatile réinscriptible ou un disque dur.
L’unité de mémorisation enregistre notamment des programmes d’ordinateur comprenant des instructions dont l’exécution par le processeur permet la mise en œuvre par le calculateur du procédé décrit ci-après.
Pour la mise en œuvre de ce procédé, le calculateur 12 est connecté à différents équipements du véhicule automobile 10.
Parmi ces équipements, le véhicule automobile 10 comprend au moins un capteur d’images 17 et un afficheur 16. Il comprend en outre ici un détecteur de distance, par exemple de type LIDAR, RADAR ou SONAR. On considérera ici qu’il s’agit d’un détecteur RADAR 18.
Le capteur d’images est ici formé par une caméra 17 qui est orientée vers l’avant, de telle sorte qu’elle peut acquérir des images d’une portion de la route se trouvant à l’avant du véhicule.
Cette caméra 17 est ici représentée comme étant fixée dans le bouclier avant du véhicule. En variante, elle pourrait être située autrement, par exemple à l’arrière du pare-brise du véhicule.
Cette caméra 17 est adaptée à acquérir des images d’une portion de la route se trouvant à l’avant du véhicule et à communiquer ces images (ou des données issues de ces images) au calculateur 12 du véhicule.
Le détecteur RADAR 18 est également orienté vers l’avant du véhicule et est adapté à communiquer les données détectées au calculateur 12.
De cette façon, grâce aux données relevées par la caméra 17 et par le détecteur RADAR 18, le calculateur 12 est en mesure d’appréhender l’environnement situé à l’avant du véhicule.
L’afficheur 16 pourrait quant à lui se présenter sous la forme d’un écran d’affichage situé sur le tableau de bord du véhicule.
Toutefois, de manière préférentielle, il s’agira plutôt d’un afficheur têtehaute 16 adapté à afficher des informations dans le champ de vision du conducteur lorsque ce dernier regarde la route à l’avant du véhicule.
Cet afficheur tête-haute 16 comporte à cet effet des moyens de génération et de projection d’images dans le champ de vision du conducteur. Dans un premier mode de réalisation représenté sur la figure 1, il comporte notamment une lame partiellement réfléchissante (communément appelée « combineur ») située dans le champ de vision du conducteur. Dans un autre mode de réalisation, le pare-brise pourra faire office de combineur.
Cet afficheur tête-haute 16 pourra par ailleurs comporter son propre calculateur ou il pourra au contraire être connecté au calculateur 12 du véhicule automobile. Dans la suite de cet exposé, on considérera cette dernière solution.
L’afficheur tête-haute 16 est d’un genre particulier en ce sens qu’il est adapté à afficher des informations en superposition de l’environnement. Autrement formulé, comme cela sera bien expliqué dans la suite de cet exposé, il sera en mesure d’afficher une information relative à une partie de l’environnement de telle sorte qu’elle sera vue par le conducteur comme étant située à la hauteur de cette partie.
La présente invention porte alors sur une manière de piloter cet afficheur tête-haute 16 qui permette de faire ressortir les objets qui sont peu visibles et qui sont en outre dignes d’intérêt pour la conduite du véhicule en toute sécurité.
Ce procédé est plus particulièrement intéressant à mettre en œuvre lorsque les conditions de luminosité sont réduites (par temps de brouillard, nuageux ou de nuit).
Selon une caractéristique particulièrement avantageuse de l’invention, ce procédé comporte les cinq étapes principales suivantes :
- une étape d’acquisition d’au moins donnée représentative de l’environnement du véhicule automobile 10 se présentant ici sous la forme d’une image 30,
- une étape de détection d’objets 40, 50, 51, 52, 53 situés dans l’environnement du véhicule automobile 10 (obstacles, infrastructures routières...),
- une étape de détermination d’un niveau d’importance Ni pour une partie au moins des objets 40, 50, 51,52, 53 détectés,
- une étape de calcul d’un coefficient de visibilité Cv pour une partie au moins des objets 40, 50, 51,52, 53 détectés, et
- une étape de commande de l’afficheur tête-haute 16 de façon à ce qu’il mette en exergue uniquement les objets 40, 50, 51,52, 53 dont les coefficients de visibilité Cv sont inférieurs à un seuil de visibilité Sv et dont les niveaux d’importance Ni sont supérieurs à un seuil d’importance Si.
Pour mieux comprendre l’objet de l’invention, on peut décrire plus en détail les cinq étapes précitées.
Au cours de la première étape, la caméra 17 acquiert à une fréquence donnée des images que le calculateur 12 mémorise ensuite.
L’une de ces images 30 a été représentée sur la figure 2.
On y observe non seulement la route empruntée par le véhicule, mais également des infrastructures routières et des obstacles.
Les infrastructures routières sont ici définies comme les « objets >> disposés à dessein sur ou le long de la route et qui permettent d’apporter des informations facilitant la conduite du véhicule en toute sécurité. Parmi ces infrastructures routières, on observe ici un panneau 50, une ligne discontinue 51 sur le côté gauche de la route, une ligne continue centrale 52, et des bornes 53 situées le long de la route.
Les obstacles sont ici définis comme les objets qui sont susceptibles d’être percutés par le véhicule. Parmi les obstacles, on observe, outre le panneau 50 et les bornes 53, un piéton 40 qui marche et s’apprête à traverser la route. La trajectoire, la vitesse et la direction de chaque obstacle peut être calculée en fonction de la position de cet obstacle sur les images 30 successivement acquises.
Au cours de la seconde étape, le calculateur 12 va chercher à détecter tous les objets jugés importants pour faciliter la conduite du véhicule automobile 10 par le conducteur en toute sécurité.
Le calculateur va plus précisément chercher à détecter au moins les obstacles et les infrastructures routières.
Cette étape de détection peut être mise en œuvre uniquement par analyse des images 30 successivement acquises par la caméra 18.
Elle peut également être mise en œuvre par fusion de données. Cette opération de fusion de données consiste à combiner les données relevées sur les images 30 successivement acquises avec les données relevées par le détecteur RADAR 18, de façon à déterminer avec précision les positions et trajectoires des obstacles 40, 50, 53.
Les troisième et quatrième étapes vont alors consister à déterminer le niveau d’importance Ni et le coefficient de visibilité Cv d’une partie au moins de ces objets 40, 50, 51,52, 53. Elles pourront être mises en œuvre successivement ou simultanément, l’une quelconque avant l’autre.
Ici, on calculera uniquement le niveau d’importance Ni des objets situés à une distance du véhicule inférieure à un seuil de distance. On calculera ensuite le coefficient de visibilité Cv de ces mêmes objets.
Ainsi, seuls les objets peu éloignés du véhicule seront considérés.
Ce seuil de distance sera variable. Il variera en fonction notamment de la vitesse du véhicule automobile 10.
En variante, on pourrait commencer par calculer uniquement le niveau d’importance Ni des objets situés à une distance du véhicule inférieure au seuil de distance, puis calculer ensuite le coefficient de visibilité Cv des seuls objets dont le niveau d’importance Ni est élevé.
A contrario, on pourrait commencer par calculer uniquement le coefficient de visibilité Cv des objets situés à une distance du véhicule inférieure au seuil de distance, puis calculer ensuite le niveau d’importance Ni des seuls objets dont le coefficient de visibilité Cv est réduit.
Dans le mode de réalisation ici considéré, au cours de la troisième étape, on commence donc par sélectionner, parmi les objets détectés, ceux qui sont situés à une distance du véhicule inférieure au seuil de distance.
Puis, on détermine les formes de ces objets, leurs positions exactes, leurs vitesses et leurs directions.
Si un objet est immobile et que sa forme indique qu’il s’agit d’une infrastructure routière, le calculateur 12 affecte à cet objet un niveau d’importance Ni supérieur au seuil d’importance Si.
Si un objet est mobile et que sa trajectoire est telle qu’elle coupe celle du véhicule automobile (ce qui indique un risque potentiel d’accident), le calculateur 12 affecte à cet objet un niveau d’importance Ni supérieur au seuil d’importance Si.
Sinon, le calculateur 12 affecte à l’objet considéré un niveau d’importance Ni inférieur au seuil d’importance Si.
Puis, au cours de la quatrième étape, le calculateur détermine le coefficient de visibilité Cv de chaque objet 40, 50, 51, 52, 53 situé à une distance du véhicule inférieure au seuil de distance.
Ce coefficient de visibilité Cv est déterminé compte tenu uniquement des données contenues dans la dernière image 30 acquise. Il est notamment calculé en fonction du contraste dudit objet par rapport à la zone de l’image 30 située autour de cet objet.
Le calcul d’un tel coefficient de visibilité Cv est déjà connu de l’homme du métier et il ne sera donc pas ici décrit en détail. Il est par exemple décrit dans le document publié en 2005 par Messieurs Nicolas Hautière, Raphaël Labayrade et Didier Aubert, qui est intitulé « Détection of Visibility condition through use of onboard caméras >> (Université Jean Monnet - Saint Etienne).
Enfin, au cours de la cinquième étape, le calculateur sélectionne une partie seulement des objets détectés en vue de les faire ressortir sur l’afficheur tête-haute 16. Les objets sélectionnés sont ceux dont le coefficient de visibilité Cv est inférieur au seuil de visibilité Sv et dont le niveau d’importance Ni est supérieur au seuil d’importance Si.
Grâce à cette sélection, le nombre d’objets mis en exergue reste réduit, ce qui évite de perturber inutilement le conducteur. Plus précisément, les obstacles potentiellement dangereux mais bien visibles ne sont pas mis en valeur puisqu’on considère que le conducteur pourra les détecter de lui-même. De la même manière, les obstacles peu visibles mais potentiellement sans danger ne sont pas mis en valeur.
On notera ici que le seuil de visibilité Sv sera fixe quelle que soit la luminosité ambiante. Il sera réglé en fonction du seuil de contraste perceptible par l’œil (il sera de préférence choisi inférieur à celui-ci).
On pourra envisager différentes méthodes pour faire ressortir les objets sélectionnés.
L’une de ces méthodes, illustrée sur la figure 2, consistera à entourer chaque objet sélectionné d’une figure géométrique (ici un rectangle).
Une autre de ces méthodes, qui sera préférée et qui est illustrée sur la figure 3, consistera pour l’afficheur tête-haute 16 à projeter une image 31 sur laquelle apparaissent les contours des objets sélectionnés.
Quoi qu’il en soit, le contour exact ou le contour global de ces objets seront ainsi illuminés de telle façon que l’attention du conducteur sera attirée sur ces objets.
La couleur et/ou l’intensité lumineuse de l’illumination pourront être invariables ou pourront au contraire varier, en fonction notamment du coefficient de visibilité Cv et/ou du niveau d’importance Ni et/ou du type d’objet sélectionné. Ainsi pourra-t-on par exemple dessiner le contour d’un obstacle dangereux en rouge et celui d’une infrastructure en blanc.
La présente invention n’est nullement limitée aux modes de réalisation 10 décrits et représentés, mais l’homme du métier saura y apporter toute variante conforme à l’invention.
Ainsi, selon une variante de l’invention, on pourra utiliser (en lieu et place de la caméra) un autre type de capteur, pour autant que ce dernier puisse fournir des données exploitables pour déterminer des coefficients de visibilité et des 15 niveaux de risque. A titre d’exemple, ce capteur pourra être un scanner tridimensionnel (plus connu sous le nom anglais « Laser Scanner »).
Claims (12)
- REVENDICATIONS1. Procédé de pilotage d’un afficheur (16) visible par le conducteur d’un véhicule automobile (10), caractérisé en ce qu’il comporte des étapes :- d’acquisition d’au moins une donnée (30) représentative de l’environnement du véhicule automobile (10),- de détection d’objets (40, 50, 51, 52, 53) situés dans l’environnement du véhicule automobile (10),- de détermination d’un niveau d’importance (Ni) pour une partie au moins des objets (40, 50, 51,52, 53) détectés,- de calcul, compte tenu de ladite donnée (30) acquise, d’un coefficient de visibilité (Cv) pour une partie au moins des objets (40, 50, 51,52, 53) détectés,- de commande de l’afficheur (16) de façon à ce qu’il mette en exergue uniquement les objets (40, 50, 51, 52, 53) dont les coefficients de visibilité (Cv) sont inférieurs à un seuil de visibilité (Sv) et dont les niveaux d’importance (Ni) sont supérieurs à un seuil d’importance (Si).
- 2. Procédé de pilotage selon la revendication précédente, dans lequel le niveau d’importance (Ni) de chaque objet (40, 50, 51, 52, 53) est déterminé en fonction au moins de la forme dudit objet (40, 50, 51, 52, 53), ladite forme étant obtenue sur la base de ladite donnée (30) acquise.
- 3. Procédé de pilotage selon la revendication précédente, dans lequel il est prévu de déterminer, en fonction au moins de la forme de chaque objet (40, 50, 51, 52, 53), si chaque objet est ou non une infrastructure routière, et dans lequel un niveau d’importance (Ni) supérieur au seuil d’importance (Si) est affecté à chaque objet (50, 51, 52, 53) qui est considéré comme une infrastructure routière et qui est situé à une distance du véhicule automobile (10) inférieure à un seuil de distance.
- 4. Procédé de pilotage selon l’une des revendications précédentes, dans lequel ladite donnée (30) est une image acquise par un capteur d’images orienté vers l’avant du véhicule automobile (10).
- 5. Procédé de pilotage selon la revendication précédente, dans lequel le niveau d’importance (Ni) de chaque objet (40, 50, 51, 52, 53) est déterminé en fonction au moins de la position dudit objet (40, 50, 51, 52, 53) sur plusieurs images (30) successivement acquises.
- 6. Procédé de pilotage selon la revendication précédente, dans lequel la trajectoire de chaque objet (40, 50, 51, 52, 53) est déterminée en fonction de la position dudit objet (40, 50, 51, 52, 53) sur plusieurs images (30) successivement acquises et un niveau d’importance (Ni) supérieur au seuil d’importance (Si) est affecté à chaque objet (40) qui est mobile et dont la trajectoire coupe celle du véhicule automobile (10).
- 7. Procédé de pilotage selon l’une des revendications précédentes, dans lequel à l’étape de commande, chaque objet (40, 50, 51, 52, 53) mis en exergue est illuminé sur une partie au moins de son contour.
- 8. Procédé de pilotage selon la revendication précédente, dans lequel la couleur et/ou l’intensité lumineuse de l’illumination est déterminée en fonction du coefficient de visibilité (Cv) et/ou du niveau d’importance (Ni).
- 9. Procédé de pilotage selon l’une des revendications précédentes, prise en combinaison avec la revendication 4, dans lequel à l’étape de détection, chaque objet (40, 50, 51, 52, 53) est détecté en fonction au moins des données contenues dans l’image (30) acquise.
- 10. Procédé de pilotage selon l’une des revendications précédentes, dans lequel à l’étape de détection, il est prévu d’acquérir des données relatives à l’environnement du véhicule automobile (10) au moyen d’un second capteur (18) qui équipe le véhicule automobile (10) et qui est distinct du capteur (17) qui acquiert chaque donnée (30), et chaque objet (40, 50, 51, 52, 53) est détecté en fonction au moins des données acquises par ledit second capteur (18).
- 11. Procédé de pilotage selon l’une des revendications précédentes, prise en combinaison avec la revendication 4, dans lequel le coefficient de visibilité (Cv) de chaque de objet (40, 50, 51,52, 53) est déterminé en fonction du contraste dudit objet (40, 50, 51, 52, 53) par rapport à la partie au moins de l’image (30) située autour dudit objet (40, 50, 51,52, 53).
- 12. Afficheur (16) comportant des moyens de génération d’images et une unité de calcul et de pilotage desdits moyens de génération d’images, caractérisé en ce que ladite unité de calcul et de pilotage est adaptée à mettre en oeuvre un procédé de pilotage conforme à l’une des revendications précédentes.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1750285A FR3061780B1 (fr) | 2017-01-12 | 2017-01-12 | Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant |
| PCT/EP2018/050433 WO2018130511A1 (fr) | 2017-01-12 | 2018-01-09 | Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant |
| EP18700198.7A EP3568802A1 (fr) | 2017-01-12 | 2018-01-09 | Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1750285 | 2017-01-12 | ||
| FR1750285A FR3061780B1 (fr) | 2017-01-12 | 2017-01-12 | Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| FR3061780A1 true FR3061780A1 (fr) | 2018-07-13 |
| FR3061780B1 FR3061780B1 (fr) | 2022-08-19 |
Family
ID=58992965
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| FR1750285A Active FR3061780B1 (fr) | 2017-01-12 | 2017-01-12 | Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3568802A1 (fr) |
| FR (1) | FR3061780B1 (fr) |
| WO (1) | WO2018130511A1 (fr) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004047449A1 (fr) * | 2002-11-16 | 2004-06-03 | Robert Bosch Gmbh | Dispositif et procede pour ameliorer la visibilite dans un vehicule automobile |
| EP2528330A1 (fr) * | 2010-01-19 | 2012-11-28 | Aisin Seiki Kabushiki Kaisha | Dispositif de surveillance de périphérie de véhicule |
| FR2979299A1 (fr) * | 2011-08-31 | 2013-03-01 | Peugeot Citroen Automobiles Sa | Dispositif de traitement pour estimer une trajectoire future d'un vehicule, associee a une couleur fonction d'un niveau de risque de collision estime, pour un systeme d'aide a la conduite |
-
2017
- 2017-01-12 FR FR1750285A patent/FR3061780B1/fr active Active
-
2018
- 2018-01-09 WO PCT/EP2018/050433 patent/WO2018130511A1/fr not_active Ceased
- 2018-01-09 EP EP18700198.7A patent/EP3568802A1/fr not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004047449A1 (fr) * | 2002-11-16 | 2004-06-03 | Robert Bosch Gmbh | Dispositif et procede pour ameliorer la visibilite dans un vehicule automobile |
| EP2528330A1 (fr) * | 2010-01-19 | 2012-11-28 | Aisin Seiki Kabushiki Kaisha | Dispositif de surveillance de périphérie de véhicule |
| FR2979299A1 (fr) * | 2011-08-31 | 2013-03-01 | Peugeot Citroen Automobiles Sa | Dispositif de traitement pour estimer une trajectoire future d'un vehicule, associee a une couleur fonction d'un niveau de risque de collision estime, pour un systeme d'aide a la conduite |
Non-Patent Citations (2)
| Title |
|---|
| DARMS M S ET AL: "Obstacle Detection and Tracking for the Urban Challenge", IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, IEEE, PISCATAWAY, NJ, USA, vol. 10, no. 3, 30 September 2009 (2009-09-30), pages 475 - 485, XP011347184, ISSN: 1524-9050, DOI: 10.1109/TITS.2009.2018319 * |
| NICOLAS HAUTIÉRE ET AL: "Automatic fog detection and estimation of visibility distance through use of an onboard camera", MACHINE VISION AND APPLICATIONS, SPRINGER, BERLIN, DE, vol. 17, no. 1, 30 April 2006 (2006-04-30), pages 8 - 20, XP019323919, ISSN: 1432-1769, DOI: 10.1007/S00138-005-0011-1 * |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3061780B1 (fr) | 2022-08-19 |
| EP3568802A1 (fr) | 2019-11-20 |
| WO2018130511A1 (fr) | 2018-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3568803B1 (fr) | Procédé de pilotage d'un véhicule automobile autonome | |
| EP2061006B1 (fr) | Procédé de détection d'un phénomène perturbateur de visibilité pour un véhicule | |
| FR3063557A1 (fr) | Dispositif de determination de l'etat d'attention d'un conducteur de vehicule, systeme embarque comportant un tel dispositif, et procede associe | |
| FR3015700A1 (fr) | Systeme et procede de commande de luminosite d'un afficheur tete haute et afficheur utilisant ledit systeme | |
| FR3025351A1 (fr) | Unite de commande electronique et systeme video dans un vehicule | |
| FR3056804A1 (fr) | Dispositif d'aide a la conduite d'un vehicule par determination et affichage de la distance de freinage dudit vehicule | |
| FR3065191A1 (fr) | Dispositif de signalisation lumineuse d'un changement de voie pour vehicule automobile | |
| FR3122391A1 (fr) | Procédé et dispositif de détermination d’un état d’attention d’un conducteur d’un véhicule autonome | |
| EP3867126B1 (fr) | Procédé et dispositif d'aide à la conduite d'un véhicule automobile en phase de recul | |
| FR3119145A1 (fr) | Procédé de détermination d’un niveau de distraction d’un conducteur de véhicule | |
| FR2942064A1 (fr) | Procede et systeme pour alerter un conducteur de vehicule | |
| EP2729328B1 (fr) | Dispositif d'aide pour mettre à la disposition d'un conducteur, de façon anticipée, une image de synthèse représentative d'une zone choisie entourant son véhicule | |
| FR3149578A1 (fr) | Procédé et dispositif d’indication de présence d’objet dans un environnement d’un véhicule | |
| FR3103052A1 (fr) | Procédé d’aide à la conduite d’un véhicule et système d’aide à la conduite associé | |
| FR3061780A1 (fr) | Procede de pilotage d'un afficheur de vehicule automobile, et afficheur correspondant | |
| FR3047961A1 (fr) | Dispositif et procede d'aide au changement de voie de circulation pour un vehicule automobile | |
| FR3099116A1 (fr) | Système et procédé de détection d’un deuxième véhicule dans une zone de détection d’un premier véhicule | |
| FR3056805A1 (fr) | Dispositif d'aide a la conduite d'un vehicule a conduite manuelle, semi-autonome ou autonome | |
| FR3060775A1 (fr) | Procede pour determiner une zone d'affichage d'un element dans un dispositif d'affichage | |
| FR3084044A1 (fr) | Procede et dispositif d’assistance a la conduite d’un vehicule, par affichage contextuel d’images panoramiques avant. | |
| FR3056808A1 (fr) | Dispositif d'aide a la conduite d'un vehicule par determination et affichage de la distance d'adaptation de la vitesse dudit vehicule et d'un objet de la scene de route | |
| FR3154078A1 (fr) | Procédé et dispositif de contrôle d’un système de changement semi-automatique de voie de circulation d’un véhicule avec confirmation par commande d’accélération | |
| FR3061113A1 (fr) | Procede de pilotage d’un systeme de video-retroviseur pour vehicule automobile | |
| FR3161650A1 (fr) | Procédé et dispositif de contrôle d’un système de projection d’images d’un véhicule selon une détection d’évènement de circulation | |
| FR3161647A1 (fr) | Procédé et dispositif de contrôle d’un système de projection d’images d’un véhicule selon un mode d’affichage permanent ou temporaire |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PLFP | Fee payment |
Year of fee payment: 2 |
|
| PLSC | Publication of the preliminary search report |
Effective date: 20180713 |
|
| PLFP | Fee payment |
Year of fee payment: 4 |
|
| PLFP | Fee payment |
Year of fee payment: 5 |
|
| PLFP | Fee payment |
Year of fee payment: 6 |
|
| PLFP | Fee payment |
Year of fee payment: 7 |
|
| PLFP | Fee payment |
Year of fee payment: 8 |
|
| PLFP | Fee payment |
Year of fee payment: 9 |
|
| PLFP | Fee payment |
Year of fee payment: 10 |