JP2004012288A - 測位装置 - Google Patents
測位装置 Download PDFInfo
- Publication number
- JP2004012288A JP2004012288A JP2002165794A JP2002165794A JP2004012288A JP 2004012288 A JP2004012288 A JP 2004012288A JP 2002165794 A JP2002165794 A JP 2002165794A JP 2002165794 A JP2002165794 A JP 2002165794A JP 2004012288 A JP2004012288 A JP 2004012288A
- Authority
- JP
- Japan
- Prior art keywords
- positioning
- satellite
- abnormal
- positioning device
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【課題】電源投入後の測位結果が正常か異常かを判定できる測位装置を提供する。
【解決手段】GPS衛星からの電波を受信して位置を測位する第1の測位手段(測位演算部4)と、固定局との通信によって概略の位置を求める第2の測位手段(PHS5)と、第1の測位手段(測位演算部4)で測位した位置が正常かどうかを判定する位置異常判定手段(位置異常検出部6)とを備え、位置異常判定手段(位置異常検出部6)が、電源投入後に第1の測位手段(測位演算部4)で測位した位置が第2の測位手段(PHS5)で求めた位置から予め定めた一定距離より離れている場合に異常と判定し、信号処理部3に、衛星信号の捕捉制御および衛星データの収集を初めからやり直させるようにする。
【選択図】 図1
【解決手段】GPS衛星からの電波を受信して位置を測位する第1の測位手段(測位演算部4)と、固定局との通信によって概略の位置を求める第2の測位手段(PHS5)と、第1の測位手段(測位演算部4)で測位した位置が正常かどうかを判定する位置異常判定手段(位置異常検出部6)とを備え、位置異常判定手段(位置異常検出部6)が、電源投入後に第1の測位手段(測位演算部4)で測位した位置が第2の測位手段(PHS5)で求めた位置から予め定めた一定距離より離れている場合に異常と判定し、信号処理部3に、衛星信号の捕捉制御および衛星データの収集を初めからやり直させるようにする。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、GPS(Global Positioning System)衛星などの測位衛星からの電波を受信して位置を測位する測位装置に関する。
【0002】
【従来の技術】
一般に、GPS衛星からの電波を受信して位置を測位する測位装置では、GPS受信機で複数のGPS衛星からの電波を受信し、それぞれのGPS衛星からの電波の伝搬時間を測定して各GPS衛星との距離を算出し、各GPS衛星が送信する衛星データに含まれる詳細軌道情報と時刻情報とから各GPS衛星の位置を求めるようにしている。
【0003】
そして、4つ以上のGPS衛星の電波を受信して連立方程式を立て、これを解くことで、受信機の3次元の測位位置(X、Y、Z)と受信機時計の誤差の、4つの未知数を求める。船舶用やカーナビゲーションシステム用などのように高度が急激に変化しない用途では、前回3次元の測位位置を求めたときの高度を用いたり、地図からの高度情報を取得したりするなどして、3つのGPS衛星の電波を受信して2次元の測位位置と受信機時計の誤差の、3つの未知数を求めることもある。
【0004】
このようにしてGPS衛星からの電波を受信して測位位置を求めることから、GPS衛星の異常などにより、測定した電波の伝搬時間が大幅に誤っていたり、復調した軌道情報に誤りがあったりした場合には、実際の位置とは大幅に異なる測位位置を出力する可能性がある。特に、測位装置の電源投入後に初めて算出した測位位置は、測位装置の電源断時からそれ以降にGPS受信機が移動している可能性もあり、最後に求めた測位位置をバックアップしていてもそれと比較して正常であるかどうかを容易には判断できないという問題がある。
【0005】
従来、このような問題を解決する測位装置として、特開2001−83227号公報に記載されたものが知られている。
【0006】
図8は、このような従来の測位装置の構成を示しており、以下、この測位装置について、概略説明する。
【0007】
従来の測位装置は、図8に示すように、GPS衛星から送信される電波を受信するGPSアンテナ81と、周波数変換を行う周波数変換部82と、衛星信号の捕捉制御を行って電波の伝搬時間測定と衛星データの復調を行う信号処理部83と、測定した電波の伝搬時間と衛星データを用いてGPS受信機の測位位置を算出する測位演算部84と、測位演算部84で求めた測位位置が正常か異常かを判定する位置異常検出部86とで構成されている。
【0008】
GPS衛星からの電波をGPSアンテナ81で受信すると、これが周波数変換部82で中間周波数信号に周波数変換される。中間周波数信号は、信号処理部83に送られ、信号処理部83で、周波数およびコード位相のサーチを行い、信号が検出されると、同期制御を行って同期を保持する。同期が取れている衛星については、コード位相を用いて衛星から電波が送信された時刻を求め、受信した時刻との差から電波の伝搬時間を求める。
【0009】
そして、同時に信号処理部83で並行して衛星データの復調を行う。測位演算部84では、信号処理部83で測定した電波の伝搬時間と衛星データに含まれる詳細軌道情報および時刻情報を用いて、各GPS衛星との距離の算出と各GPS衛星の位置の算出を行って連立方程式を立て、受信機の測位位置と受信機時計の誤差を求める。
【0010】
測位演算部84で求められた受信機の測位位置は、位置異常検出部86において以下の手順で正しい位置か否かが判定され、正しい位置と判定された場合にのみ外部へ出力される。
【0011】
位置異常検出部86では、受信機の電源が遮断される直前まで測位していた測位位置と時刻とをバックアップされたメモリに保存しておき、電源が遮断される直前の時刻から電源投入後初回の測位時刻までの経過時間にGPS受信機を搭載している移動体の推定最大速度(例えば自動車であれば約200km/h)をかけて移動可能距離を求め、電源が遮断される直前まで測位していた位置と移動可能距離から移動範囲枠を決める。
【0012】
電源投入後初回の測位位置がこの移動範囲枠内にあれば正常と判定し、枠外であれば異常と判定する。異常と判定された場合には、信号処理部83において、周波数およびコード位相のサーチ動作と衛星データの復調処理を初めからやり直す。
【0013】
このように、従来のGPS受信機においても、移動範囲枠を設定することによって、電源投入後初回の測位位置の異常を判定することができる。
【0014】
【発明が解決しようとする課題】
しかしながら、従来の測位装置では、長期間電源を遮断していた場合、その後の移動範囲枠が広域になって実質的に異常を判定できないという問題があった。
【0015】
本発明は、このような問題点を解決するものであり、長時間電源が遮断されていた場合でも、電源投入後初回の測位位置の異常を容易に判定することができる測位装置を提供するものである。
【0016】
【課題を解決するための手段】
本発明の測位装置は、第1および第2の測位手段と、第1および第2の測位手段によってそれぞれ測位された測位位置を互いに比較する比較手段と、比較手段によって比較された測位位置が予め定めた距離以上離れていたとき、第1の測位手段で測位された測位位置が異常であると判断する異常判断手段とを備えた構成とした。
【0017】
この構成により、電源が遮断されていた時間に関わらず、第1および第2の測位手段によって測位された位置から、第1の測位手段によって測位された位置が正常か異常かを容易に判定することができ、移動範囲が広域になって判定が行えなくなるというようなことがなくなるという作用を有する。
【0018】
また、本発明の測位装置は、衛星からの電波を受信して位置を測位する第1の測位手段と、地上の固定局との通信によって位置を測位する第2の測位手段と、第1ならびに第2の測位手段によってそれぞれ測位された測位位置が予め定めた距離以上離れていたとき、第1の測位手段で測位された測位位置が異常であると判断する異常判断手段とを備えた構成とした。
【0019】
この構成により、衛星からの電波を受信して位置を測位する第1の測位手段の測位結果を、地上の固定局との通信によって測位位置を求める第2の測位手段の測位結果に基き、異常であるかどうかを容易に判断することができる。
【0020】
また、本発明の測位装置は、第2の測位手段が、受信エリアが限定された電波発信源の電波を受信して、概略の位置を求める測位手段である構成とした。この構成により、第1の測位手段によって測位された位置が、受信エリアが限定された電波を受信して、概略の位置を求める第2の測位手段の測位結果に基づき、正常か、異常か判断されることになる。
【0021】
また、本発明の測位装置は、電波発信源が、携帯電話機の基地局、簡易型携帯電話機の基地局、放送局、および無線通信局の内の少なくとも1つである構成とした。
【0022】
この構成により、第1の測位手段によって測位された位置が、携帯電話機の基地局、簡易型携帯電話機の基地局、放送局、および無線通信局の内の少なくとも1つからの電波を受信して、概略の位置を求める第2の測位手段の測位結果に基づき、正常か、異常か判断されることになる。
【0023】
また、本発明の測位装置は、第2の測位手段が、地図情報を記憶しておく地図情報記憶手段を備えた構成とした。この構成により、電源投入後に第1の測位手段で測位した位置が、保持している地図情報のエリア内か否かで位置の異常を検出することができる。
【0024】
また、本発明の測位装置は、地図情報を、利用者が予め使用する地域として定めた地図情報である構成とした。この構成により、電源投入後に第1の測位手段で測位した位置が、保持している利用者が予め使用する地域として定めた地図情報のエリア内か否かで位置の異常を検出することができる。
【0025】
また、本発明の測位装置は、異常判断手段で異常と判断されたとき、位置測位時に使用した各衛星の位置及び各衛星までの距離について、第2の測位手段によって測位された概略の測位位置を基準にしてそれぞれ正常か異常かの判定を行い、異常な衛星を検出する異常衛星検出手段を更に備えた構成とした。
【0026】
この構成により、電源投入後に、第1の測位手段によって測位された位置が異常であった場合に、異常であった衛星以外は、同期の継続と、既に収集した衛星データの利用が共に可能となるため、再度第1の測位手段によって位置を測位するまでの時間を短縮することができる。
【0027】
また、本発明の測位装置は、異常な衛星を検出したとき、第2の測位手段によって測位された概略の測位位置に対する異常な衛星の仰角を計算し、この仰角に基づいて衛星データの再収集の必要性を判断する判断手段を更に備えた構成とした。
【0028】
この構成により、異常な衛星と判断された原因が衛星データでない場合に、既に収集した衛星データの利用が可能となるため、再度第1の測位手段によって位置を測位するまでの時間を短縮することができる。
【0029】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を用いて説明する。
【0030】
(第1の実施の形態)
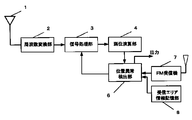
図1は、本発明の第1の実施の形態における測位装置の構成を示すブロック図である。図1に示すように、本発明の第1の実施の形態における測位装置は、GPS衛星(図示せず)からの電波を受信するGPSアンテナ1と、GPSアンテナ1で受信された信号を中間周波数に変換する周波数変換部2と、周波数変換された信号を信号処理する信号処理部3と、信号処理された情報をもとに位置を測位する測位演算部4と、簡易型の携帯電話機(PHS)5と、位置異常検出部6とから構成されている。ここで、PHS5は、地上の固定局との通信によって概略の位置を求めることができる手段であればよく、携帯電話機であっても良い。
【0031】
次に、本実施の形態における測位装置について、図2を用いて、その動作を説明する。図2は、本発明の第1の実施の形態における測位装置の位置異常検出処理の流れを示すフロー図である。
【0032】
本実施の形態において、電源を投入すると、その後、GPSアンテナ1は、GPS衛星から送信される電波を受信して周波数変換部2へ送り、周波数変換部2は、受信した信号を中間周波数信号に変換して信号処理部3へ送る。信号処理部3は、複数の衛星に対して衛星信号の捕捉制御を行って、電波の伝搬時間測定と衛星データの復調を行い、測位演算部4は、信号処理部3で測定した電波の伝搬時間と衛星データを用いてGPS受信機の位置を算出する(ステップ101)。算出された位置データは、位置異常検出部6へ送られる。
【0033】
PHS5は、並行して基地局(図示せず)との通信を行い、基地局の位置を概略位置として取得する(ステップ102)。取得された概略位置データは、位置異常検出部6へ送られる。なお、このとき、PHS5では、複数の基地局の電波強度を測定することで概略位置データの精度を向上させるようにしてもよい。
【0034】
位置異常検出部6は、測位演算部4で算出した位置がPHS5で取得した概略位置から一定距離内にあるか否かを判定し(ステップ103)、一定距離内にある場合には、その位置データは正常として外部へ出力する(ステップ105)。その後は、電源が遮断されるまで衛星信号の受信および受信機位置の算出処理を継続する。一定距離については、PHS5で取得できる概略位置の精度から予め決めておけばよい。
【0035】
一定距離内にない場合には、位置異常と判定して外部へ測位位置データを出力せず、信号処理部3に位置異常を知らせる。信号処理部3では、位置異常の通知を受けると、受信中の全衛星について、衛星信号の捕捉を初めからやり直すとともに、保持している衛星データを破棄して衛星データの再収集を行う(ステップ104)。衛星信号の捕捉と衛星データの再収集が完了すると、測位演算部4での受信機位置算出処理(ステップ101)を再度行い、その後は同様の動作を繰り返す。
【0036】
以上のように、本実施の形態では、PHSや携帯電話機で概略位置を取得して正常な位置の範囲を求めており、GPS衛星からの信号を用いて算出した位置の判定を常に正しく行うことができる。特に、電源投入後初回の測位位置に対しては、電源遮断時間に関わらず、位置の異常判定を早期に正確に行えるという利点を有する。
【0037】
(第2の実施の形態)
図3は、本発明の第2の実施の形態における測位装置の構成を示すブロック図である。図3において、図1と同一の符号を付したものは、図1に示すものと実質同一のものを示している。したがって、これらの同一符号を付したものについては、その詳細な説明を省略し、異なる点のみ詳細に説明する。
【0038】
第2の実施の形態において、第1の実施の形態と異なる点は、PHS5の代わりにFM受信機7とFM受信機7による受信エリアの情報を記憶しておく受信エリア情報記憶部8を備えた点である。なお、ここで、FM受信機7は、受信エリアが限定された地上放送や無線通信局の受信部であればよく、例えば、AM受信機、テレビ受信機や船舶局受信機、航空交通管制局受信機、タクシー無線受信機、電波灯台と言われる無線標識局用受信機などであってもよい。
【0039】
次に、本実施の形態について、図3を用いて、その動作を説明する。なお、説明に当たっては、第1の実施の形態と異なる点を主に説明する。
【0040】
電源投入後、測位演算部4でGPS衛星信号を用いて受信機位置を算出するのと並行して、FM受信機7では周波数のサーチを行って受信可能な周波数を検出し、位置異常検出部6へ送る。受信エリア情報記憶部8には、予め各放送局の周波数と受信エリア情報が記憶されており、位置異常検出部6では、FM受信機7で検出された受信可能な周波数を基に、受信エリア情報記憶部8に記憶された各放送局の周波数から受信エリア情報を引き出し、現在位置の存在可能範囲を求める。
【0041】
そして、測位演算部4で算出した位置が先に求められた現在位置の存在可能範囲内にあるか否かを判断し、これによって位置の異常判定を行う。その後の処理は、第1の実施の形態と同様であるので、その説明を省略する。船舶局、航空交通管制局、タクシー無線、電波灯台と言われる無線標識局でも、それらの基地局の周波数と受信可能エリア情報を受信エリア情報記憶部8に記憶しておけば、それらを受信できる受信機によってFM受信機7と同様の手順で実施できる。
【0042】
以上のように、本実施の形態によれば、FM受信機7で検出した受信可能周波数と受信エリア情報記憶部8に記憶されている各放送局の周波数と受信エリア情報から、現在位置の存在可能範囲を求めているので、GPS衛星信号を用いて算出した位置データの異常を正しく判定することができる。
【0043】
なお、実施の形態では、第1の測位手段として、GPS衛星からの電波を受信して位置を測位する測位手段、第2の測位手段として、携帯電話機、簡易型携帯電話機、ラジオ受信機、テレビ受像機、固定基地局、放送局、無線通信局など受信エリアが限定された電波発信源の電波を受けて概略の位置を測位する測位手段をそれぞれ用いているが、これらは、いずれもこれらに限定されず、受信エリア情報が取得可能でその電波が受信可能であれば如何なる電波発信源であってもよい。
【0044】
(第3の実施の形態)
図4は、本発明の第3の実施の形態における測位装置の構成を示すブロック図である。図4において、図1と同一の符号を付したものは、図1に示すものと実質同一のものを示している。したがって、これらの同一符号を付したものについては、その詳細な説明を省略し、異なる点のみ詳細に説明する。
【0045】
第3の実施の形態において、第1の実施の形態と異なる点は、PHS5の代わりに地図情報記憶部9を備えた点である。
【0046】
次に、本実施の形態について、図4を用いて、その動作を説明する。なお、説明に当たっては、第1の実施の形態と異なる点を主に説明する。
【0047】
電源投入後、測位演算部4で算出された受信機の測位位置データは、位置異常検出部6へ送られる。地図情報記憶部9には、ユーザーが予め使用する地域の地図情報を記憶しておく。
【0048】
位置異常検出部6では、測位演算部4で算出された測位位置データが地図情報記憶部9に記憶された地図情報が存在する範囲内にあるか否かによって位置データの異常判定を行う。その後の処理は、第1の実施の形態と同様であり、その説明は省略する。
【0049】
以上のように、本実施の形態によれば、ユーザーが予め使用する地域の地図情報を地図情報記憶部9に記憶しておくことにより、この地図情報記憶部9に記憶された地図情報に基づいてGPS衛星からの信号を用いて算出した測位位置データの異常を正しく判定することができる。
【0050】
(第4の実施の形態)
図5は、本発明の第4の実施の形態における測位装置の構成を示すブロック図である。図5において、図1と同一の符号を付したものは、図1に示すものと実質同一のものを示している。したがって、これらの同一符号を付したものについては、その詳細な説明を省略し、異なる点のみ詳細に説明する。
【0051】
第4の実施の形態において、第1の実施の形態と異なる点は、異常衛星検出部10を備え、位置異常となった原因の衛星を特定するようにした点である。
【0052】
次に、本実施の形態について、図6を用いて、その動作を説明する。なお、ここで、図6は、本実施の形態において実行される異常衛星検出処理の流れを示すフロー図である。説明に当たっては、第1の実施の形態と異なる点を主に説明する。
【0053】
電源投入後、位置異常検出部6で位置の異常を検出するまでの動作、すなわち、図2において、ステップ103の「ない」までは、第1の実施の形態と同じである。位置異常検出部6で測位位置データの異常を検出すると、異常衛星検出部10は、測位位置データの異常検出に用いた概略位置と各衛星の位置から各衛星との距離を算出する(ステップ201)。そして、算出した各衛星との距離と、衛星信号を受信して測定した各衛星との距離とを比較し、その差が予め定めた一定値以上の衛星については、衛星の位置または測定した衛星との距離が誤っていると判断し、異常な衛星とみなす(ステップ202)。
【0054】
異常衛星検出部10は、信号処理部3に異常と判断された異常衛星を知らせ、信号処理部3では、異常衛星の通知を受けると、異常衛星について、衛星信号の捕捉を初めからやり直すとともに、保持している衛星データを破棄して衛星データの再収集を行う(ステップ203)。その後の処理は、図2におけるステップ101に移行し、第1の実施の形態と同じ動作を行う。
【0055】
以上のように、本実施の形態によれば、異常衛星以外の衛星は、同期の継続と、既に収集した衛星データの利用が可能となるため、再度測位演算部4で位置を求めるまでの時間を短縮することができる。
【0056】
(第5の実施の形態)
本発明の第5の実施の形態における測位装置は、第4の実施の形態と同様、図5に示すように構成されている。第5の実施の形態において、第4の実施の形態と異なる点は、異常衛星検出部10で異常衛星を特定したときに、位置の異常検出に用いた概略位置に対する異常衛星の仰角を計算し、この仰角によって衛星データの再収集が必要か否かを判断するようにした点である。
【0057】
次に、本実施の形態について、図7を用いて、その動作を説明する。なお、ここで、図7は、本実施の形態において実行する異常衛星検出処理の流れを示すフロー図である。説明に当たっては、第1、4の実施の形態と異なる点を主に説明する。
【0058】
電源投入後、異常衛星検出部10で異常衛星を検出するまでの動作、すなわち、ステップ202までの動作は、第4の実施の形態と同じである。異常衛星検出部10で異常衛星を検出すると、信号処理部3に異常衛星を通知するとともに、概略位置に対する異常衛星の仰角を計算し(ステップ301)、例えば、仰角が0度未満、すなわち、あたかも地球の裏に存在するかのように算出された場合には、衛星の位置が異常なため衛星データの再収集が必要と判断して(ステップ302)、信号処理部3に衛星データの再収集を指示する。
【0059】
信号処理部3では、異常衛星の通知を受けると、異常衛星について、衛星信号の捕捉を初めからやり直すとともに、衛星データの再収集を指示された場合には保持している衛星データを破棄して衛星データの再収集を行う(ステップ303)。衛星データの再収集を指示されない場合には、異常衛星について、衛星信号の捕捉を初めからやり直すだけで既に収集した衛星データは保持しておく(ステップ304)。その後の処理は、第4の実施の形態と同じである。
【0060】
以上のように、本実施の形態によれば、異常衛星であっても、衛星データの再収集が必要でない場合は、それを判断して、既に収集した衛星データを利用可能とするため、再度測位演算部4で位置を求めるまでの時間を短縮することができる。
【0061】
【発明の効果】
以上説明したように、本発明の測位装置によれば、電源が遮断されていた時間が長時間であっても、第2の測位手段によって測位された位置から、第1の測位手段によって測位された位置が正常か、異常かを容易に判定することができ、電源投入後初回の測位位置の異常をより正確に判定することができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態における測位装置の構成を示すブロック図
【図2】本発明の第1の実施の形態における測位装置で実行する位置異常検出処理の流れを示すフロー図
【図3】本発明の第2の実施の形態における測位装置の構成を示すブロック図
【図4】本発明の第3の実施の形態における測位装置の構成を示すブロック図
【図5】本発明の第4および第5の実施の形態における測位装置の構成を示すブロック図
【図6】本発明の第4の実施の形態における測位装置で実行する異常衛星検出処理の流れを示すフロー図
【図7】本発明の第5の実施の形態における測位装置で実行する異常衛星検出処理の流れを示すフロー図
【図8】従来の測位装置の構成を示すブロック図
【符号の説明】
1 GPSアンテナ
2 周波数変換部
3 信号処理部
4 測位演算部
5 PHS
6 位置異常検出部
7 FM受信機
8 受信エリア情報記憶部
9 地図情報記憶部
10 異常衛星検出部
【発明の属する技術分野】
本発明は、GPS(Global Positioning System)衛星などの測位衛星からの電波を受信して位置を測位する測位装置に関する。
【0002】
【従来の技術】
一般に、GPS衛星からの電波を受信して位置を測位する測位装置では、GPS受信機で複数のGPS衛星からの電波を受信し、それぞれのGPS衛星からの電波の伝搬時間を測定して各GPS衛星との距離を算出し、各GPS衛星が送信する衛星データに含まれる詳細軌道情報と時刻情報とから各GPS衛星の位置を求めるようにしている。
【0003】
そして、4つ以上のGPS衛星の電波を受信して連立方程式を立て、これを解くことで、受信機の3次元の測位位置(X、Y、Z)と受信機時計の誤差の、4つの未知数を求める。船舶用やカーナビゲーションシステム用などのように高度が急激に変化しない用途では、前回3次元の測位位置を求めたときの高度を用いたり、地図からの高度情報を取得したりするなどして、3つのGPS衛星の電波を受信して2次元の測位位置と受信機時計の誤差の、3つの未知数を求めることもある。
【0004】
このようにしてGPS衛星からの電波を受信して測位位置を求めることから、GPS衛星の異常などにより、測定した電波の伝搬時間が大幅に誤っていたり、復調した軌道情報に誤りがあったりした場合には、実際の位置とは大幅に異なる測位位置を出力する可能性がある。特に、測位装置の電源投入後に初めて算出した測位位置は、測位装置の電源断時からそれ以降にGPS受信機が移動している可能性もあり、最後に求めた測位位置をバックアップしていてもそれと比較して正常であるかどうかを容易には判断できないという問題がある。
【0005】
従来、このような問題を解決する測位装置として、特開2001−83227号公報に記載されたものが知られている。
【0006】
図8は、このような従来の測位装置の構成を示しており、以下、この測位装置について、概略説明する。
【0007】
従来の測位装置は、図8に示すように、GPS衛星から送信される電波を受信するGPSアンテナ81と、周波数変換を行う周波数変換部82と、衛星信号の捕捉制御を行って電波の伝搬時間測定と衛星データの復調を行う信号処理部83と、測定した電波の伝搬時間と衛星データを用いてGPS受信機の測位位置を算出する測位演算部84と、測位演算部84で求めた測位位置が正常か異常かを判定する位置異常検出部86とで構成されている。
【0008】
GPS衛星からの電波をGPSアンテナ81で受信すると、これが周波数変換部82で中間周波数信号に周波数変換される。中間周波数信号は、信号処理部83に送られ、信号処理部83で、周波数およびコード位相のサーチを行い、信号が検出されると、同期制御を行って同期を保持する。同期が取れている衛星については、コード位相を用いて衛星から電波が送信された時刻を求め、受信した時刻との差から電波の伝搬時間を求める。
【0009】
そして、同時に信号処理部83で並行して衛星データの復調を行う。測位演算部84では、信号処理部83で測定した電波の伝搬時間と衛星データに含まれる詳細軌道情報および時刻情報を用いて、各GPS衛星との距離の算出と各GPS衛星の位置の算出を行って連立方程式を立て、受信機の測位位置と受信機時計の誤差を求める。
【0010】
測位演算部84で求められた受信機の測位位置は、位置異常検出部86において以下の手順で正しい位置か否かが判定され、正しい位置と判定された場合にのみ外部へ出力される。
【0011】
位置異常検出部86では、受信機の電源が遮断される直前まで測位していた測位位置と時刻とをバックアップされたメモリに保存しておき、電源が遮断される直前の時刻から電源投入後初回の測位時刻までの経過時間にGPS受信機を搭載している移動体の推定最大速度(例えば自動車であれば約200km/h)をかけて移動可能距離を求め、電源が遮断される直前まで測位していた位置と移動可能距離から移動範囲枠を決める。
【0012】
電源投入後初回の測位位置がこの移動範囲枠内にあれば正常と判定し、枠外であれば異常と判定する。異常と判定された場合には、信号処理部83において、周波数およびコード位相のサーチ動作と衛星データの復調処理を初めからやり直す。
【0013】
このように、従来のGPS受信機においても、移動範囲枠を設定することによって、電源投入後初回の測位位置の異常を判定することができる。
【0014】
【発明が解決しようとする課題】
しかしながら、従来の測位装置では、長期間電源を遮断していた場合、その後の移動範囲枠が広域になって実質的に異常を判定できないという問題があった。
【0015】
本発明は、このような問題点を解決するものであり、長時間電源が遮断されていた場合でも、電源投入後初回の測位位置の異常を容易に判定することができる測位装置を提供するものである。
【0016】
【課題を解決するための手段】
本発明の測位装置は、第1および第2の測位手段と、第1および第2の測位手段によってそれぞれ測位された測位位置を互いに比較する比較手段と、比較手段によって比較された測位位置が予め定めた距離以上離れていたとき、第1の測位手段で測位された測位位置が異常であると判断する異常判断手段とを備えた構成とした。
【0017】
この構成により、電源が遮断されていた時間に関わらず、第1および第2の測位手段によって測位された位置から、第1の測位手段によって測位された位置が正常か異常かを容易に判定することができ、移動範囲が広域になって判定が行えなくなるというようなことがなくなるという作用を有する。
【0018】
また、本発明の測位装置は、衛星からの電波を受信して位置を測位する第1の測位手段と、地上の固定局との通信によって位置を測位する第2の測位手段と、第1ならびに第2の測位手段によってそれぞれ測位された測位位置が予め定めた距離以上離れていたとき、第1の測位手段で測位された測位位置が異常であると判断する異常判断手段とを備えた構成とした。
【0019】
この構成により、衛星からの電波を受信して位置を測位する第1の測位手段の測位結果を、地上の固定局との通信によって測位位置を求める第2の測位手段の測位結果に基き、異常であるかどうかを容易に判断することができる。
【0020】
また、本発明の測位装置は、第2の測位手段が、受信エリアが限定された電波発信源の電波を受信して、概略の位置を求める測位手段である構成とした。この構成により、第1の測位手段によって測位された位置が、受信エリアが限定された電波を受信して、概略の位置を求める第2の測位手段の測位結果に基づき、正常か、異常か判断されることになる。
【0021】
また、本発明の測位装置は、電波発信源が、携帯電話機の基地局、簡易型携帯電話機の基地局、放送局、および無線通信局の内の少なくとも1つである構成とした。
【0022】
この構成により、第1の測位手段によって測位された位置が、携帯電話機の基地局、簡易型携帯電話機の基地局、放送局、および無線通信局の内の少なくとも1つからの電波を受信して、概略の位置を求める第2の測位手段の測位結果に基づき、正常か、異常か判断されることになる。
【0023】
また、本発明の測位装置は、第2の測位手段が、地図情報を記憶しておく地図情報記憶手段を備えた構成とした。この構成により、電源投入後に第1の測位手段で測位した位置が、保持している地図情報のエリア内か否かで位置の異常を検出することができる。
【0024】
また、本発明の測位装置は、地図情報を、利用者が予め使用する地域として定めた地図情報である構成とした。この構成により、電源投入後に第1の測位手段で測位した位置が、保持している利用者が予め使用する地域として定めた地図情報のエリア内か否かで位置の異常を検出することができる。
【0025】
また、本発明の測位装置は、異常判断手段で異常と判断されたとき、位置測位時に使用した各衛星の位置及び各衛星までの距離について、第2の測位手段によって測位された概略の測位位置を基準にしてそれぞれ正常か異常かの判定を行い、異常な衛星を検出する異常衛星検出手段を更に備えた構成とした。
【0026】
この構成により、電源投入後に、第1の測位手段によって測位された位置が異常であった場合に、異常であった衛星以外は、同期の継続と、既に収集した衛星データの利用が共に可能となるため、再度第1の測位手段によって位置を測位するまでの時間を短縮することができる。
【0027】
また、本発明の測位装置は、異常な衛星を検出したとき、第2の測位手段によって測位された概略の測位位置に対する異常な衛星の仰角を計算し、この仰角に基づいて衛星データの再収集の必要性を判断する判断手段を更に備えた構成とした。
【0028】
この構成により、異常な衛星と判断された原因が衛星データでない場合に、既に収集した衛星データの利用が可能となるため、再度第1の測位手段によって位置を測位するまでの時間を短縮することができる。
【0029】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を用いて説明する。
【0030】
(第1の実施の形態)
図1は、本発明の第1の実施の形態における測位装置の構成を示すブロック図である。図1に示すように、本発明の第1の実施の形態における測位装置は、GPS衛星(図示せず)からの電波を受信するGPSアンテナ1と、GPSアンテナ1で受信された信号を中間周波数に変換する周波数変換部2と、周波数変換された信号を信号処理する信号処理部3と、信号処理された情報をもとに位置を測位する測位演算部4と、簡易型の携帯電話機(PHS)5と、位置異常検出部6とから構成されている。ここで、PHS5は、地上の固定局との通信によって概略の位置を求めることができる手段であればよく、携帯電話機であっても良い。
【0031】
次に、本実施の形態における測位装置について、図2を用いて、その動作を説明する。図2は、本発明の第1の実施の形態における測位装置の位置異常検出処理の流れを示すフロー図である。
【0032】
本実施の形態において、電源を投入すると、その後、GPSアンテナ1は、GPS衛星から送信される電波を受信して周波数変換部2へ送り、周波数変換部2は、受信した信号を中間周波数信号に変換して信号処理部3へ送る。信号処理部3は、複数の衛星に対して衛星信号の捕捉制御を行って、電波の伝搬時間測定と衛星データの復調を行い、測位演算部4は、信号処理部3で測定した電波の伝搬時間と衛星データを用いてGPS受信機の位置を算出する(ステップ101)。算出された位置データは、位置異常検出部6へ送られる。
【0033】
PHS5は、並行して基地局(図示せず)との通信を行い、基地局の位置を概略位置として取得する(ステップ102)。取得された概略位置データは、位置異常検出部6へ送られる。なお、このとき、PHS5では、複数の基地局の電波強度を測定することで概略位置データの精度を向上させるようにしてもよい。
【0034】
位置異常検出部6は、測位演算部4で算出した位置がPHS5で取得した概略位置から一定距離内にあるか否かを判定し(ステップ103)、一定距離内にある場合には、その位置データは正常として外部へ出力する(ステップ105)。その後は、電源が遮断されるまで衛星信号の受信および受信機位置の算出処理を継続する。一定距離については、PHS5で取得できる概略位置の精度から予め決めておけばよい。
【0035】
一定距離内にない場合には、位置異常と判定して外部へ測位位置データを出力せず、信号処理部3に位置異常を知らせる。信号処理部3では、位置異常の通知を受けると、受信中の全衛星について、衛星信号の捕捉を初めからやり直すとともに、保持している衛星データを破棄して衛星データの再収集を行う(ステップ104)。衛星信号の捕捉と衛星データの再収集が完了すると、測位演算部4での受信機位置算出処理(ステップ101)を再度行い、その後は同様の動作を繰り返す。
【0036】
以上のように、本実施の形態では、PHSや携帯電話機で概略位置を取得して正常な位置の範囲を求めており、GPS衛星からの信号を用いて算出した位置の判定を常に正しく行うことができる。特に、電源投入後初回の測位位置に対しては、電源遮断時間に関わらず、位置の異常判定を早期に正確に行えるという利点を有する。
【0037】
(第2の実施の形態)
図3は、本発明の第2の実施の形態における測位装置の構成を示すブロック図である。図3において、図1と同一の符号を付したものは、図1に示すものと実質同一のものを示している。したがって、これらの同一符号を付したものについては、その詳細な説明を省略し、異なる点のみ詳細に説明する。
【0038】
第2の実施の形態において、第1の実施の形態と異なる点は、PHS5の代わりにFM受信機7とFM受信機7による受信エリアの情報を記憶しておく受信エリア情報記憶部8を備えた点である。なお、ここで、FM受信機7は、受信エリアが限定された地上放送や無線通信局の受信部であればよく、例えば、AM受信機、テレビ受信機や船舶局受信機、航空交通管制局受信機、タクシー無線受信機、電波灯台と言われる無線標識局用受信機などであってもよい。
【0039】
次に、本実施の形態について、図3を用いて、その動作を説明する。なお、説明に当たっては、第1の実施の形態と異なる点を主に説明する。
【0040】
電源投入後、測位演算部4でGPS衛星信号を用いて受信機位置を算出するのと並行して、FM受信機7では周波数のサーチを行って受信可能な周波数を検出し、位置異常検出部6へ送る。受信エリア情報記憶部8には、予め各放送局の周波数と受信エリア情報が記憶されており、位置異常検出部6では、FM受信機7で検出された受信可能な周波数を基に、受信エリア情報記憶部8に記憶された各放送局の周波数から受信エリア情報を引き出し、現在位置の存在可能範囲を求める。
【0041】
そして、測位演算部4で算出した位置が先に求められた現在位置の存在可能範囲内にあるか否かを判断し、これによって位置の異常判定を行う。その後の処理は、第1の実施の形態と同様であるので、その説明を省略する。船舶局、航空交通管制局、タクシー無線、電波灯台と言われる無線標識局でも、それらの基地局の周波数と受信可能エリア情報を受信エリア情報記憶部8に記憶しておけば、それらを受信できる受信機によってFM受信機7と同様の手順で実施できる。
【0042】
以上のように、本実施の形態によれば、FM受信機7で検出した受信可能周波数と受信エリア情報記憶部8に記憶されている各放送局の周波数と受信エリア情報から、現在位置の存在可能範囲を求めているので、GPS衛星信号を用いて算出した位置データの異常を正しく判定することができる。
【0043】
なお、実施の形態では、第1の測位手段として、GPS衛星からの電波を受信して位置を測位する測位手段、第2の測位手段として、携帯電話機、簡易型携帯電話機、ラジオ受信機、テレビ受像機、固定基地局、放送局、無線通信局など受信エリアが限定された電波発信源の電波を受けて概略の位置を測位する測位手段をそれぞれ用いているが、これらは、いずれもこれらに限定されず、受信エリア情報が取得可能でその電波が受信可能であれば如何なる電波発信源であってもよい。
【0044】
(第3の実施の形態)
図4は、本発明の第3の実施の形態における測位装置の構成を示すブロック図である。図4において、図1と同一の符号を付したものは、図1に示すものと実質同一のものを示している。したがって、これらの同一符号を付したものについては、その詳細な説明を省略し、異なる点のみ詳細に説明する。
【0045】
第3の実施の形態において、第1の実施の形態と異なる点は、PHS5の代わりに地図情報記憶部9を備えた点である。
【0046】
次に、本実施の形態について、図4を用いて、その動作を説明する。なお、説明に当たっては、第1の実施の形態と異なる点を主に説明する。
【0047】
電源投入後、測位演算部4で算出された受信機の測位位置データは、位置異常検出部6へ送られる。地図情報記憶部9には、ユーザーが予め使用する地域の地図情報を記憶しておく。
【0048】
位置異常検出部6では、測位演算部4で算出された測位位置データが地図情報記憶部9に記憶された地図情報が存在する範囲内にあるか否かによって位置データの異常判定を行う。その後の処理は、第1の実施の形態と同様であり、その説明は省略する。
【0049】
以上のように、本実施の形態によれば、ユーザーが予め使用する地域の地図情報を地図情報記憶部9に記憶しておくことにより、この地図情報記憶部9に記憶された地図情報に基づいてGPS衛星からの信号を用いて算出した測位位置データの異常を正しく判定することができる。
【0050】
(第4の実施の形態)
図5は、本発明の第4の実施の形態における測位装置の構成を示すブロック図である。図5において、図1と同一の符号を付したものは、図1に示すものと実質同一のものを示している。したがって、これらの同一符号を付したものについては、その詳細な説明を省略し、異なる点のみ詳細に説明する。
【0051】
第4の実施の形態において、第1の実施の形態と異なる点は、異常衛星検出部10を備え、位置異常となった原因の衛星を特定するようにした点である。
【0052】
次に、本実施の形態について、図6を用いて、その動作を説明する。なお、ここで、図6は、本実施の形態において実行される異常衛星検出処理の流れを示すフロー図である。説明に当たっては、第1の実施の形態と異なる点を主に説明する。
【0053】
電源投入後、位置異常検出部6で位置の異常を検出するまでの動作、すなわち、図2において、ステップ103の「ない」までは、第1の実施の形態と同じである。位置異常検出部6で測位位置データの異常を検出すると、異常衛星検出部10は、測位位置データの異常検出に用いた概略位置と各衛星の位置から各衛星との距離を算出する(ステップ201)。そして、算出した各衛星との距離と、衛星信号を受信して測定した各衛星との距離とを比較し、その差が予め定めた一定値以上の衛星については、衛星の位置または測定した衛星との距離が誤っていると判断し、異常な衛星とみなす(ステップ202)。
【0054】
異常衛星検出部10は、信号処理部3に異常と判断された異常衛星を知らせ、信号処理部3では、異常衛星の通知を受けると、異常衛星について、衛星信号の捕捉を初めからやり直すとともに、保持している衛星データを破棄して衛星データの再収集を行う(ステップ203)。その後の処理は、図2におけるステップ101に移行し、第1の実施の形態と同じ動作を行う。
【0055】
以上のように、本実施の形態によれば、異常衛星以外の衛星は、同期の継続と、既に収集した衛星データの利用が可能となるため、再度測位演算部4で位置を求めるまでの時間を短縮することができる。
【0056】
(第5の実施の形態)
本発明の第5の実施の形態における測位装置は、第4の実施の形態と同様、図5に示すように構成されている。第5の実施の形態において、第4の実施の形態と異なる点は、異常衛星検出部10で異常衛星を特定したときに、位置の異常検出に用いた概略位置に対する異常衛星の仰角を計算し、この仰角によって衛星データの再収集が必要か否かを判断するようにした点である。
【0057】
次に、本実施の形態について、図7を用いて、その動作を説明する。なお、ここで、図7は、本実施の形態において実行する異常衛星検出処理の流れを示すフロー図である。説明に当たっては、第1、4の実施の形態と異なる点を主に説明する。
【0058】
電源投入後、異常衛星検出部10で異常衛星を検出するまでの動作、すなわち、ステップ202までの動作は、第4の実施の形態と同じである。異常衛星検出部10で異常衛星を検出すると、信号処理部3に異常衛星を通知するとともに、概略位置に対する異常衛星の仰角を計算し(ステップ301)、例えば、仰角が0度未満、すなわち、あたかも地球の裏に存在するかのように算出された場合には、衛星の位置が異常なため衛星データの再収集が必要と判断して(ステップ302)、信号処理部3に衛星データの再収集を指示する。
【0059】
信号処理部3では、異常衛星の通知を受けると、異常衛星について、衛星信号の捕捉を初めからやり直すとともに、衛星データの再収集を指示された場合には保持している衛星データを破棄して衛星データの再収集を行う(ステップ303)。衛星データの再収集を指示されない場合には、異常衛星について、衛星信号の捕捉を初めからやり直すだけで既に収集した衛星データは保持しておく(ステップ304)。その後の処理は、第4の実施の形態と同じである。
【0060】
以上のように、本実施の形態によれば、異常衛星であっても、衛星データの再収集が必要でない場合は、それを判断して、既に収集した衛星データを利用可能とするため、再度測位演算部4で位置を求めるまでの時間を短縮することができる。
【0061】
【発明の効果】
以上説明したように、本発明の測位装置によれば、電源が遮断されていた時間が長時間であっても、第2の測位手段によって測位された位置から、第1の測位手段によって測位された位置が正常か、異常かを容易に判定することができ、電源投入後初回の測位位置の異常をより正確に判定することができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態における測位装置の構成を示すブロック図
【図2】本発明の第1の実施の形態における測位装置で実行する位置異常検出処理の流れを示すフロー図
【図3】本発明の第2の実施の形態における測位装置の構成を示すブロック図
【図4】本発明の第3の実施の形態における測位装置の構成を示すブロック図
【図5】本発明の第4および第5の実施の形態における測位装置の構成を示すブロック図
【図6】本発明の第4の実施の形態における測位装置で実行する異常衛星検出処理の流れを示すフロー図
【図7】本発明の第5の実施の形態における測位装置で実行する異常衛星検出処理の流れを示すフロー図
【図8】従来の測位装置の構成を示すブロック図
【符号の説明】
1 GPSアンテナ
2 周波数変換部
3 信号処理部
4 測位演算部
5 PHS
6 位置異常検出部
7 FM受信機
8 受信エリア情報記憶部
9 地図情報記憶部
10 異常衛星検出部
Claims (8)
- 第1および第2の測位手段と、前記第1および第2の測位手段によってそれぞれ測位された測位位置を互いに比較する比較手段と、前記比較手段によって比較された測位位置が予め定めた距離以上離れていたとき、前記第1の測位手段で測位された測位位置が異常であると判断する異常判断手段とを備えた測位装置。
- 衛星からの電波を受信して位置を測位する第1の測位手段と、地上の固定局との通信によって位置を測位する第2の測位手段と、前記第1ならびに第2の測位手段によってそれぞれ測位された測位位置が予め定めた距離以上離れていたとき、前記第1の測位手段で測位された測位位置が異常であると判断する異常判断手段とを備えた測位装置。
- 前記第2の測位手段が、受信エリアが限定された電波発信源の電波を受信して、概略の位置を求める測位手段であることを特徴とする請求項1または2記載の測位装置。
- 前記電波発信源が、携帯電話機の基地局、簡易型携帯電話機の基地局、放送局、および無線通信局の内の少なくとも1つであることを特徴とする請求項3記載の測位装置。
- 前記第2の測位手段が、地図情報を記憶しておく地図情報記憶手段を備えたことを特徴とする請求項1または2記載の測位装置。
- 前記地図情報は、利用者が予め使用する地域として定めた地図情報であることを特徴とする請求項5記載の測位装置。
- 前記異常判断手段で異常と判断されたとき、位置測位時に使用した各衛星の位置及び前記各衛星までの距離について、前記第2の測位手段によって測位された概略の測位位置を基準にしてそれぞれ正常か異常かの判定を行い、異常な衛星を検出する異常衛星検出手段を更に備えたことを特徴とする請求項2乃至6のいずれかに記載の測位装置。
- 前記異常な衛星を検出したとき、前記第2の測位手段によって測位された概略の測位位置に対する前記異常な衛星の仰角を計算し、前記仰角に基づいて衛星データの再収集の必要性を判断する判断手段を更に備えたことを特徴とする請求項7記載の測位装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002165794A JP2004012288A (ja) | 2002-06-06 | 2002-06-06 | 測位装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002165794A JP2004012288A (ja) | 2002-06-06 | 2002-06-06 | 測位装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004012288A true JP2004012288A (ja) | 2004-01-15 |
Family
ID=30433551
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002165794A Pending JP2004012288A (ja) | 2002-06-06 | 2002-06-06 | 測位装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004012288A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7555384B2 (en) * | 2003-02-14 | 2009-06-30 | Toyota Jidosha Kabushiki Kaisha | Mobile object position detecting apparatus |
| KR101392068B1 (ko) | 2012-07-27 | 2014-05-07 | 한국항공우주연구원 | 기저선 정보를 이용한 위성항법시스템의 고장 검출 장치 및 그 방법 |
| KR101503001B1 (ko) | 2014-01-28 | 2015-03-18 | 건국대학교 산학협력단 | 지상설비 안테나와 기저선 길이 예측값을 이용한 위성항법시스템의 고장 판단 시스템 및 그 방법 |
| CN119511327A (zh) * | 2025-01-17 | 2025-02-25 | 成都碧奥信息技术有限公司 | 一种基于北斗通信的定位方法及系统 |
-
2002
- 2002-06-06 JP JP2002165794A patent/JP2004012288A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7555384B2 (en) * | 2003-02-14 | 2009-06-30 | Toyota Jidosha Kabushiki Kaisha | Mobile object position detecting apparatus |
| US7996150B2 (en) | 2003-02-14 | 2011-08-09 | Toyota Jidosha Kabushiki Kaisha | Mobile object position detecting method |
| KR101392068B1 (ko) | 2012-07-27 | 2014-05-07 | 한국항공우주연구원 | 기저선 정보를 이용한 위성항법시스템의 고장 검출 장치 및 그 방법 |
| KR101503001B1 (ko) | 2014-01-28 | 2015-03-18 | 건국대학교 산학협력단 | 지상설비 안테나와 기저선 길이 예측값을 이용한 위성항법시스템의 고장 판단 시스템 및 그 방법 |
| CN119511327A (zh) * | 2025-01-17 | 2025-02-25 | 成都碧奥信息技术有限公司 | 一种基于北斗通信的定位方法及系统 |
| CN119511327B (zh) * | 2025-01-17 | 2025-04-15 | 成都碧奥信息技术有限公司 | 一种基于北斗通信的定位方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10018730B2 (en) | Method and apparatus for determining a position of a GNSS receiver | |
| RU2235341C2 (ru) | Система и способ определения положения беспроводного приемопередатчика системы множественного доступа с кодовым разделением каналов | |
| CN102047136B (zh) | 利用卫星系统的因特网热点定位 | |
| US6459405B1 (en) | Satellite-based location system employing knowledge-based sequential signal search strategy | |
| US7436355B2 (en) | Method and apparatus for geolocation determination | |
| KR101266582B1 (ko) | Sps 동작에서 초기 포지션 불확실성을 감소시키기 위한 시스템 및/또는 방법 | |
| EP2251748A1 (en) | Method and apparatus for position determination using reduced number of gps satellites and synchronized and unsynchronized base stations | |
| EP1083440A2 (en) | A satellite-based location system employing dynamic integration techniques | |
| US20070236387A1 (en) | Method of optimization of processing of location data in the presence of a plurality of satellite positioning constellations | |
| US11846713B2 (en) | Self-assisted fast acquisition and first fix for a standalone GNSS receiver | |
| CN105474042B (zh) | 用于检测信号降级环境中的gnss卫星信号的方法和装置 | |
| CN104380141B (zh) | 用于确定gnss接收器的位置的方法和装置 | |
| JP2001343447A (ja) | 移動体位置検出方法 | |
| KR20010051654A (ko) | 타이밍 측정 방법 | |
| CN105676237A (zh) | 基于卫星的位置确定 | |
| JP2004012288A (ja) | 測位装置 | |
| JP2003018082A (ja) | 通信状態測定装置および通信状態測定方法、並びに、通信状態解析装置、通信状態解析方法および通信状態解析プログラム | |
| JPH1138114A (ja) | Gps受信装置 | |
| KR100678143B1 (ko) | 이동통신 시스템에서 전세계 위치 확인 시스템용 이동 단말기의 기준시계와 기지국 신호 동기 장치 및 방법 | |
| JP2001083227A (ja) | Gps受信機 | |
| JP2003194912A (ja) | 測位装置 | |
| KR20030046682A (ko) | 이동 통신 시스템에서 미분 전세계 위치 측정 시스템을이용한 기지국 측위 장치 | |
| KR20070052532A (ko) | 전세계 위치 확인 시스템을 이용한 이동 단말의 기준시계공유 장치 및 방법 |