JP2004012474A - 画像読取装置および画像読取装置の制御方法 - Google Patents
画像読取装置および画像読取装置の制御方法 Download PDFInfo
- Publication number
- JP2004012474A JP2004012474A JP2002161303A JP2002161303A JP2004012474A JP 2004012474 A JP2004012474 A JP 2004012474A JP 2002161303 A JP2002161303 A JP 2002161303A JP 2002161303 A JP2002161303 A JP 2002161303A JP 2004012474 A JP2004012474 A JP 2004012474A
- Authority
- JP
- Japan
- Prior art keywords
- document
- image reading
- platen
- transmission member
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


































Landscapes
- Optical Systems Of Projection Type Copiers (AREA)
- Light Sources And Details Of Projection-Printing Devices (AREA)
- Facsimile Scanning Arrangements (AREA)
Abstract
【課題】自動原稿搬送装置で原稿を搬送中に読み取る方式(流し読み方式)において、原稿台ガラスに外部からゴミが進入した場合でも、ゴミを画像として誤って読み取ってしまうのを防ぐこと。
【解決手段】CPUからの制御により、ADF用プラテン201に結合された一つもしくは複数の電気機械変換素子210によってADF用プラテン201に屈曲振動を励振させる構成を特徴とする。
【選択図】 図1
【解決手段】CPUからの制御により、ADF用プラテン201に結合された一つもしくは複数の電気機械変換素子210によってADF用プラテン201に屈曲振動を励振させる構成を特徴とする。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、自動原稿搬送装置を備え、原稿を搬送中に読み取る方式が可能な画像読取装置および画像読取装置の制御方法に関するものである。
【0002】
【従来の技術】
従来の画像読取装置は、自動原稿搬送装置により搬送された原稿を原稿台ガラス上に載置して、読取用の光学系を所定方向に走査することで、原稿画像を読み取っていた(固定読み方式)。また、読取用の光学系を固定し、自動原稿搬送装置で、原稿を搬送中に読み取る方式が知られている(流し読み方式)。
【0003】
このような原稿を搬送中に読み取る方式の画像読取装置では、原稿台ガラス上に外部からゴミが進入した場合、光学系が固定であるため、同じゴミを読み続け、あたかも直線であるかのように、画像を読み取ってしまうため、原稿台ガラスに振動を与えることで、ゴミを画像読取部上から移動させるものが知られている。
【0004】
【発明が解決しようとする課題】
図37は、従来の画像読取装置の読取機構の斜視図であり、図38は、図37に示した画像読取装置における原稿画像と読取画像とゴミ画像との関係を説明する図である。
【0005】
図37において、リーダ部500が、図示しない自動原稿搬送装置(ADF)から搬送されてくる原稿画像A(図38参照)を読み取る場合は、スキャナユニット509がADF用プラテン501の下に移動して停止し、原稿2001が読取位置R上を搬送されている間、画像情報を読み取る。
【0006】
しかしながら、図38に示すようにADF用プラテン501の読取部RにゴミGが何らかの要因で入り込んだ場合、原稿画像Aの画像を読み込むと、読取画像は読取画像BのようにゴミGが位置Rに停止しているため、読取画像としては線画像GIとなって現れてしまい、どんな原稿を読み込んでも、該ゴミGがADF用プラテン501から排除されない限り、読取不良となってしまう。
【0007】
本発明は、上記の問題点を解決するためになされたもので、本発明の目的は、原稿送り装置の原稿搬送路と読取手段の間にあり原稿の画像を透過するように配置された透過部材に結合された一つもしくは複数の電気機械変換素子によって前記透過部材に屈曲振動又は縦振動を励振させることにより、自動原稿搬送装置で原稿を搬送中に読み取る方式(流し読み方式)において、原稿台ガラスに外部からゴミが進入した場合でも、ゴミを画像として誤って読み取ってしまうのを防ぐことができる画像読取装置および画像読取装置の制御方法を提供することである。
【0008】
【課題を解決するための手段】
本発明に係る第1の発明は、複数の原稿を順次搬送する自動原稿送り装置(図1に示す原稿搬送装置(ADF)100)と、前記自動原稿送り装置から搬送された原稿の画像を搬送中に読み取る読取手段(図1に示すスキャナユニット209,ミラー204,205,206,レンズ207,CCDセンサ208)と、前記自動原稿送り装置の原稿搬送路と前記読取手段の間にあり原稿の画像を透過するように配置された透過部材(図1,図2,図4〜図6,図21〜図24に示すADF原稿用プラテンガラス201,図14〜図20,図25〜図28に示すADF原稿用プラテンガラス301,図31〜図34に示すADF原稿用プラテンガラス401)とを備えた画像読取装置において、前記透過部材に結合された一つもしくは複数の電気機械変換素子(図2,図4〜図6,図21〜図24に示す電気機械変換素子210,図14〜図20,図25〜図28に示す電気機械変換素子310,311,図31〜図34に示す電気機械変換素子410)と、前記電気機械変換素子に高周波電圧を印加する電圧供給手段(図3に示す電気機械変換素子駆動回路16,図14に示す電気機械変換素子駆動回路17)と、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に振動を励振させる制御手段(図3,図14に示すCPU800)とを有することを特徴とする。
【0009】
本発明に係る第2の発明は、前記制御手段(図3,図14に示すCPU800)は、前記一つもしくは複数の電気機械変換素子(図3〜図6に示す電気機械変換素子210,図14〜図20に示す電気機械変換素子310,311)と前記電圧供給手段によって前記透過部材に屈曲振動を励振させることを特徴とする。
【0010】
本発明に係る第3の発明は、前記一つもしくは複数の電気機械変換素子(図3〜図6に示す電気機械変換素子210,図14〜図20に示す電気機械変換素子310,311)は、前記制御手段により励振された前記透過部材の屈曲振動の最大振幅位置を含む位置(図6に示す位置,図17,図18に示す位置)にそれぞれ結合されることを特徴とする。
【0011】
本発明に係る第4の発明は、前記制御手段(図3,図14に示すCPU800)は、前記一つもしくは複数の電気機械変換素子(図21〜図24に示す電気機械変換素子210,図25〜図28に示す電気機械変換素子310,311,図31〜図34に示す電気機械変換素子410)と前記電圧供給手段によって前記透過部材に縦振動を励振させることを特徴とする。
【0012】
本発明に係る第5の発明は、前記一つもしくは複数の電気機械変換素子(図21〜図24に示す電気機械変換素子210,図25〜図28に示す電気機械変換素子310,311,図31〜図34に示す電気機械変換素子410)は、前記制御手段により励振された前記透過部材の縦振動の最小振幅位置を含む位置にそれぞれ結合されることを特徴とする。
【0013】
本発明に係る第6の発明は、前記透過部材(図21〜図24に示すADF原稿用プラテンガラス201,図25〜図28に示すADF原稿用プラテンガラス301)は、第1の透過部材(図21〜図24に示すプラテン201−1,図25〜図28に示すプラテン301−1)と第2の透過部材(図21〜図24に示すプラテン201−2,図25〜図28に示すプラテン301−2)から構成され、前記一つもしくは複数の電気機械変換素子(図21〜図24に示す電気機械変換素子210,図25〜図28に示す電気機械変換素子310,311)は、該第1の透過部材と第2の透過部材の間に結合されることを特徴とする。
【0014】
本発明に係る第7の発明は、前記一つもしくは複数の電気機械変換素子(図31〜図34に示す電気機械変換素子410)は、前記透過部材の画像読取平面と平行する面に結合されることを特徴とする。
【0015】
本発明に係る第8の発明は、前記制御手段(図3,図14に示すCPU800)は、前記透過部材の主走査方向の機械的共振周波数とほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする。
【0016】
本発明に係る第9の発明は、前記制御手段(図3,図14に示すCPU800)は、前記透過部材の副走査方向の機械的共振周波数とほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする。
【0017】
本発明に係る第10の発明は、前記制御手段(図3,図14に示すCPU800)は、前記透過部材の主走査方向の機械的共振周波数と副走査方向の機械的共振周波数と各々ほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする。
【0018】
本発明に係る第11の発明は、複数の原稿を順次搬送する自動原稿送り装置と、前記自動原稿送り装置から搬送された原稿の画像を搬送中に読み取る読取手段と、前記自動原稿送り装置の原稿搬送路と前記読取手段の間にあり原稿の画像を透過するように配置された透過部材と、前記透過部材に結合された一つもしくは複数の電気機械変換素子と、前記電気機械変換素子に高周波電圧を印加する電圧供給手段とを備えた画像読取装置の制御方法において、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に振動を励振させる振動工程(図7のmain2の振動開始〜main20の振動停止までの振動工程)を有することを特徴とする。
【0019】
本発明に係る第12の発明は、前記振動工程は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に屈曲振動を励振させることを特徴とする。
【0020】
本発明に係る第13の発明は、前記振動工程は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に縦振動を励振させることを特徴とする。
【0021】
【発明の実施の形態】
〔第1実施形態〕
図1,図2は、本発明の第1実施形態を示す画像読取装置の構成を説明する概略断面図である。
【0022】
図1、図2において、原稿搬送装置であるADF100は、原稿トレイ20上に表面を上に向けてセットされた原稿束Sからピックアップローラ1により、最上位の原稿から分離部2へと繰り出される。分離部2は、上方に分離ローラ、下方に分離パッドが配置されており、原稿束Sの最上紙より一枚ずつ分離を行う。
【0023】
片面原稿で表面の画像を読み取る場合は、分離された原稿は、第1レジストローラ3にて分離搬送中の斜行補正を行った後、第1レジストローラ3から第2レジストローラ4、第1搬送ローラ5により搬送され、読取位置Rを搬送されている間に表面の画像が読み取られる。そして、第2搬送ローラ6から排紙ローラ8により、排紙トレイ21上に原稿表面を下に向けて順番に排出される。
【0024】
また、両面原稿で表裏両面の画像を読み取る場合は、分離された原稿は、第1レジストローラ3にて分離搬送中の斜行補正を行った後、第2レジストローラ4から第1搬送ローラ5、第2搬送ローラ6により搬送され、読取位置Rを搬送されている間に表面の画像が読み取られる。そして、第2搬送ローラ6から排紙ローラ8により、一旦、原稿端部が排紙トレイ21上に搬送され、読取後端側が排紙ローラ8にニップされた状態で搬送が停止される。
【0025】
その後、原稿をスイッチバック搬送し、第2レジストローラ4にて、再度斜行補正を行った後、第1搬送ローラ5、第2搬送ローラ6により搬送され、読取位置Rを再度搬送されている間に裏面の画像が読み取られる。
【0026】
しかし、このまま第2搬送ローラ6から排紙ローラ8により、排紙トレイ21上に原稿表面を上に向けて排出すると、原稿トレイ20上にセットされた面順と異なってしまう。
【0027】
よって、裏面を読み取られた原稿は、第2搬送ローラ6、排紙ローラ8により、再度原稿端部が排紙トレイ21上に搬送され、読取後端側が排紙ローラ8にニップされた状態で搬送が停止され、スイッチバック搬送し、第2レジストローラ4、第1搬送ローラ5、第2搬送ローラ6により搬送された後、排紙ローラ8により排紙トレイ21上に表面を下に向けて順番に排出される。
【0028】
ただし、読取位置Rを搬送されている間であっても、この間は、原稿画像の読取は行われない。
【0029】
ここで、ピックアップローラ1、分離部2の分離ローラ、第1レジストローラ3は、分離モータM1で駆動され、第2レジストローラ4、第1搬送ローラ5、第2搬送ローラ6は給紙モータM2で駆動され、排紙ローラ8は、排紙モータM3で駆動される。
【0030】
リーダ部200は、原稿に記録された画像情報を光学的に読取、光電変換して画像データとして入力するものであり、ADF原稿用プラテンガラス201(以下、ADFプラテン)、ブック原稿用プラテンガラス202(以下、ブック用プラテン)、ランプ203とミラー204を有するスキャナユニット209、ミラー205、206、レンズ207、CCDセンサ208等を有している。
【0031】
リーダ部200は、ADF100から搬送されてくる原稿画像を読み取る場合は、スキャナユニット209をADF用プラテン201の下に移動して停止させ、原稿が読取位置R上を搬送されている間、画像情報を読み取る。
【0032】
また、ブック用プラテン202上に載置された原稿の画像を読み取る場合は、スキャナユニット209を図示しない原稿セット基準から副走査方向に移動させ、原稿の画像情報を読み取る。
【0033】
画像情報の読取は、ランプ203が点灯し原稿を照射する。原稿からの反射光は、ミラー204、205、206及びレンズ207を介して、CCDセンサ208に入力される。そして、CCDセンサ208に入力された原稿からの反射光は、ここで光電変換等の電気処理が行われ、通常のデジタル処理が施される。
【0034】
なお、本発明はリーダ部200と、原稿搬送装置(ADF)100が一体化された読取装置としても適用可能である。
【0035】
図3は、図1,図2に示したADF100の制御構成を説明するブロック図である。
【0036】
図3において、中央演算処理装置である制御手段(以下、CPU)800、リードオンリメモリ(以下、ROM)801、ランダムアクセスメモリ(以下、RAM)802、出力ポート、及び入力ポートを備えている。
【0037】
ROM801には、制御用プログラムが格納されており、RAM802には、入力データや作業用データが格納されている。また、出力ポートには、分離モータM1、給紙モータM2、排紙モータM3、離間ソレノイドSL、給紙クラッチCLが接続されており、入力ポートには、分離後センサ10、レジストセンサ11、リードセンサ12、排紙センサ13、原稿検知センサ14、原稿長検知センサ15、原稿幅検知センサ810がそれぞれ接続されている。
【0038】
CPU800は、ROM801に格納された制御プログラムにしたがって分離モータM1、給紙モータM2、排紙モータM3、離間ソレノイドSL、給紙クラッチCL、電気機械変換素子210の各々の駆動を制御する。CPU800は、図示しないリーダ部200の中央演算処理装置(CPU)とシリアル通信を行い、リーダ部200との間で制御データの授受を行うようになっている。
【0039】
なお、本発明はリーダ部200と、原稿搬送装置100が一体化された読取装置として適用する場合は、通信を行うことなく、1つのCPUで構成しても良い。
【0040】
また、CPU800には、ADF用プラテン201に取り付けられた電気機械変換素子210を駆動するための駆動ドライバ(電気機械変換素子駆動回路)16が出力ポートを介して接続され、その駆動ドライバ16には電気機械変換素子210が接続されている。
【0041】
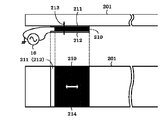
図4〜図6は、本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図であり、図4は、図1に示したADF用プラテン201の振動機構の取り付け状態に対応する。
【0042】
図4に示すように、電気機械変換素子210は、画像読取位置R域外に取り付けられており、読取画像に影響を与えることはない位置に設けられる。
【0043】
図5は、図4に示したADF用プラテン201と電気機械変換素子210との駆動回路例に対応する。
【0044】
図5に示すように、ADF用プラテン201は、電極板211、電極板212、電気機械変換素子210から構成されている。ADF用プラテン201下面と電極板211上面、電極板211下面と電気機械変換素子210上面、電気機械素子210下面と電極板212上面はそれぞれ固化型の接着剤(不図示)にて融着(結合)されている。
【0045】
また、電極板211と電極板212は駆動ドライバ16に接続され、CPU800の制御によって電極板211と電極板212の両電極間に、例えば高周波電圧が印加できるようになっている。ADF用プラテン201をGND(接地)とするために電極板211はGNDに接続される。
【0046】
次に、ADF用プラテン201に屈曲振動の定在波を励振させるための構成について述べる。
【0047】
図6は、図5に示した電極板211と電極板212により構成される振動駆動回路により励振されるADF用プラテン201の屈曲振動の定在波の一例に対応する。
【0048】
図5に示した電気機械変換素子210は平板型の圧電素子であり、例えば、PZT等の圧電素子等が用いられる。この電気機械変換素子210は、図5に示されるような矢印213方向に分極されており、駆動ドライバ16によって電気機械変換素子210の両側に電圧を印加することにより、図5の矢印214方向に縦振動を励振する。
【0049】
この縦振動を利用してADF用プラテン201に屈曲振動の定在波を励振させるためには、ADF用プラテン201の機械的共振周波数と電気機械変換素子210の電気的共振周波数を一致させる必要がある。
【0050】
まず、弾性体に屈曲振動の定在波を励振する為のn次屈曲振動の機械的共振周波数FBnは、一般的に下記第(1)式で与えられる。
【0051】
FBn=(αn2/(2πL2)){√(E/ρ)}(T/2√3)……(1)
ただし、αn=π/2+n・πにより決定される。
【0052】
また、第(1)式中、nは屈曲振動モードの次数を示し、Lは弾性体の長さを示し、Tは弾性体の厚みを示し、Eは弾性体のヤング率を示し、ρは弾性体の密度を示す。
【0053】
本実施形態の具体例として、ADF用プラテン201の長さを「398(mm)」、厚みを「4(mm)」、プラテン201の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」、40次の屈曲振動(n=40)を励振させると仮定した場合の上記第(1)式の演算結果を下記に示す。
【0054】
「FB40=32.04(kHz)」、「波長=19.9(mm)」となり、この結果より、ADF用プラテン201に励振される40次屈曲振動定在波の腹位置の中心はADF用プラテン201の端部から、「xm=4.98+m・λ/2(mm)」の位置に励振される。なお、mは0〜39までの整数とする。
【0055】
腹の数は「40」であるから、具体的には、「m=0」の時、「x1=4.98(mm)」、「m=1」の時「x2=14.93(mm)」、「m=2」の時「x3=24.88(mm)」、……、「m=39」の時「x40=393.03(mm)」となる。
【0056】
そこで、この腹位置の中心の位置(最大振幅位置)に電気機械変換素子210の中心が位置するように、図3に示した電気機械変換素子210をプラテン201の下面側に上述したように接着剤により融着し、この電気機械変換素子210に周波数FB40=32.04(kHz)の高周波電圧を駆動ドライバ16から印加することでADF用プラテン201に40次屈曲振動の定在波を励振させることができる。
【0057】
ここで、次数mが偶数の場合、屈曲振動の腹位置の変位がADF用プラテン201の上方向への振幅であるとすると、次数mが奇数の場合は、屈曲振動の変位はADF用プラテン201の下方向への振幅となる。
【0058】
逆に、次数mが偶数の場合の腹位置の変位がADF用プラテン201の下方向への振幅であるとすると、次数mが奇数の場合の変位は、図6に示すようにADF用プラテン201の上方向への振幅となる。
【0059】
図7は、本発明に係る画像読取装置における第1の制御手順を示すフローチャートであり、本実施形態における読取制御におけるメイン処理に対応する。なお、main1〜main20は各ステップを示す。
【0060】
ADFはCPU800により、原稿トレイ20上に原稿がセットされたか否か、更には、図示しない画像読取装置本体の操作部にあるスタートキーが押し下げられたか否かを繰り返し判定しつつ待機状態となっている(main1)。なお、原稿がセットされたか否かのCPU800による判定は、原稿検知センサ14の検出結果に基づいてなされる。
【0061】
そして、判定の結果、原稿が原稿トレイ20にセットされており、且つ、スタートキーが押し下げられた場合には、CPU800からの制御信号が駆動ドライバ16に送信される。この制御信号により駆動ドライバ16は電気機械変換素子210に高周波電圧を印加する。これにより、ADF用プラテン201には屈曲振動の定在波が励振され、ADF用プラテン201が振動を開始する(main2)。
【0062】
この振動により、ADF用プラテン201上のゴミGを除去することができる。また、同時に、片面原稿モードであるか両面モードであるかの判別を行う(main3)。
【0063】
そして、ステップmain3で、片面原稿モードであると判別した場合は、片面モードの場合、原稿トレイ20より分離動作(詳細は後述する図8に示す)を開始し(main4)、給紙動作(詳細は後述する図9に示す)を行い(main5)、読取開始前に原稿サイズを判別する(詳細は後述する図10に示す)(main6)。
【0064】
そして、読取動作(詳細は後述する図11に示す)を行い(main7)、排紙動作(詳細は後述する図12に示す)を行い(main8)、排紙トレイ21へと原稿を順次排出する。
【0065】
なお、原稿サイズの判別(原稿サイズチェック)は、後述する図10に示すように、図示しない原稿トレイ20上での規制ガイド板の幅情報と給紙動作完了時点での、分離センサ10の状態により判別する。
【0066】
一方、ステップmain3で、両面原稿モードであると判別した場合は、原稿トレイ20より分離動作を開始し(main9)、給紙動作(main10)、片面モードと同様に原稿サイズを判別する(main11)。
【0067】
そして、初めに表面の読取動作を行い(main12)、反転動作(詳細は後述する図13に示す)を行い(main13)、給紙動作を開始し(main14)、その後、裏面の読取動作を行い(main15)、反転動作を行い(main16)、給紙動作を開始し(main17)、空送り動作を行い(main18)、排紙動作を行って(main19)、排紙トレイ21へと原稿を排出する。
【0068】
そして、原稿の排紙動作の完了後、CPU800からの制御信号が駆動ドライバ16に送信される。この制御信号により駆動ドライバ16は電気機械変換素子210に印加している高周波電圧の印加を停止する。これにより、ADF用プラテン201に励振されていた屈曲振動の励振が停止され(main20)、処理を終了する。
【0069】
〔分離動作〕
図8は、本発明に係る画像読取装置における原稿分離動作手順の一例を示すフローチャートである。なお、S301〜S310は各ステップを示す。
【0070】
原稿検知センサ14の状態で、原稿トレイ20上に原稿があると判断した場合、分離モータM1を正転駆動すると同時に給紙クラッチCLをONして、図示しないピックアップローラ1を上下動させるピックアップアームを駆動し、原稿トレイ20上の原稿束Sの最上紙にピックアップローラ1が接するまで降下する。同時に、ピックアップローラ1と分離部2の分離ローラが給紙方向に駆動され(S301)、最上紙のみが分離部2から搬送パスへと分離される。
【0071】
そして、分離後センサ10まで分離された原稿の先端が達した事を検知すると(S302)、原稿トレイ20上の原稿束Sから原稿が分離された事を認識する。その後、レジストセンサ11まで原稿の先端が達した事を検知すると(S303)、カウンタをセットして(S304)、カウントアップしたら(S305)、すなわち、所定量搬送した後、分離モータM1を停止(OFF)させる(S306)。この時、第1レジストローラ3は、停止しており、分離された原稿の先端が第1レジストローラ3にループ形成した状態で突き当てられ、分離搬送途中での斜行が補正される。
【0072】
その後、給紙クラッチCLをOFFして、分離モータM1を逆転駆動する事(S307)で、給紙ローラ1、及び分離ローラの駆動が切られ、第1レジストローラ3が駆動されて、斜行補正された原稿が更に下流へと搬送される。
【0073】
そして、カウンタをセットして(S308)、カウントアップしたら(S309)、すなわち、第1レジストローラ3から所定量搬送した後、分離モータM1を停止させ(S310)、処理を終了する。この時、原稿先端部は、第2レジストローラ4より上流位置で停止している。
【0074】
〔給紙動作〕
図9は、本発明に係る画像読取装置における原稿給紙動作手順の一例を示すフローチャートである。なお、S401〜S407は各ステップを示す。なお、給紙動作は、分離パスからの給紙動作と反転パスからの給紙動作とがある。
【0075】
まず、分離パスからの給紙動作であるかどうかを判定して(S401)、分離パスからの給紙動作であると判定した場合、分離モータM1を逆転駆動して(S402)、ステップS403へ進む。
【0076】
一方、ステップS401で、分離パスからの給紙動作でないと判定した場合は、第1レジストローラ3を駆動すると共に、給紙モータM2を起動して、第2レジストローラ4と第1搬送ローラ5と第2搬送ローラ6を駆動する(S403)。なお、反転パスからの給紙動作の場合は、給紙モータM2のみを起動する。
【0077】
そして、第2レジストローラ4の上流に位置する原稿は、給紙モータM2によって駆動される第2レジストローラ4へと搬送され、リードセンサ12まで原稿先端が搬送された事をリードセンサがONすることにより検知すると(S404)、カウンタをセットして(S405)、カウントアップしたら(S406)、すなわち、所定量搬送した後、給紙モータM2を停止させるとともに、原稿先端を読取位置Rより上流に停止させ(S407)、処理を終了する。
【0078】
この時、分離パスからの給紙動作であった場合は、分離モータM1も停止させる。
【0079】
〔原稿サイズチェック〕
図10は、本発明に係る画像読取装置における原稿サイズチェック動作手順の一例を示すフローチャートである。なお、S901〜S919は各ステップを示す。
【0080】
まず、ステップS901において、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A4」であるか否かを判定し、幅データが「A4」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S902)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「A4」と判別し(S903)、処理を終了する。
【0081】
一方、ステップS902で、分離後センサ10がONであると判定した場合には、原稿サイズを「A3R」と判別し(S904)、処理を終了する。
【0082】
一方、ステップS901で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A4」でないと判定された場合には、原稿の幅データが「B5」であるか否かを判定し(S905)、幅データが「B5」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S906)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「B5」と判別し(S907)、処理を終了する。
【0083】
一方、ステップS906で、分離後センサ10がONであると判定した場合には、原稿サイズを「B4R」と判別し(S908)、処理を終了する。
【0084】
一方、ステップS905で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「B5」でないと判定された場合には、原稿の幅データが「A5」であるか否かを判定し(S909)、幅データが「A5」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S910)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「A5」と判別し(S911)、処理を終了する。
【0085】
一方、ステップS910で、分離後センサ10がONであると判定した場合には、原稿サイズを「A4R」と判別し(S912)、処理を終了する。
【0086】
一方、ステップS909で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A5」でないと判定された場合には、原稿の幅データが「B6」であるか否かを判定し(S913)、幅データが「B6」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S914)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「B6」と判別し(S915)、処理を終了する。
【0087】
一方、ステップS914で、分離後センサ10がONであると判定した場合には、原稿サイズを「B5R」と判別し(S916)、処理を終了する。
【0088】
一方、ステップS913で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「B6」でないと判定された場合には、原稿の幅データが「A6」であるか否かを判定し(S917)、幅データが「A6」であると判定した場合には、原稿サイズを「A5R」と判別し(S919)、処理を終了する。
【0089】
一方、ステップS917で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A6」でないと判定された場合には、原稿サイズを「不明」とし(S918)、処理を終了する。
【0090】
以上により、原稿トレイ20上の図示しない規制ガイド板の幅情報と給紙動作完了時点での、分離後センサ10の状態により原稿サイズの判別(原稿サイズチェック)をすることができる。
【0091】
〔読取動作〕
図11は、本発明に係る画像読取装置における原稿読取動作手順の一例を示すフローチャートである。なお、S501〜S513は各ステップを示す。
【0092】
まず、給紙モータM2を駆動して、第2レジストローラ4と第1搬送ローラ5と第2搬送ローラ6が駆動され(S501)、カウンタをセットして(S502)、カウントアップしたら(S503)、すなわち読取位置Rの上流に位置する原稿が所定量搬送された後、原稿先端が読取位置Rに達したと判断すると、リーダ部200による原稿の画像読取が行われる(S504)。
【0093】
画像の読取は、ADF100からリーダ部200に対して、読取開始を通知する事で、リーダ部200が画像データの読み込みを開始する。
【0094】
その後、カウンタをセットして(S505)、カウントアップしたら(S506)、すなわち、所定量搬送した後、原稿検知センサ14が原稿トレイ20上に次に読取を行うべく原稿があるかどうかを判断して(S507)、原稿があると判断した場合は、次原稿の分離開始を許可する(S508)。実際に分離が開始されるタイミングは、原稿サイズ及び原稿搬送速度(読取速度)によって、可変である。
【0095】
一方、ステップS507で、原稿がないと判断された場合は、原稿画像の読取が行われ、リードセンサ12に原稿後端が達した事を検知すると(S509)、その後、カウンタをセットして(S510)、カウントアップしたら(S511)、すなわち、所定量搬送した後、原稿後端が読取位置Rに達したと判断すると原稿読取を終了する(S512)。そして、読取開始と同様に、ADF100からリーダ部200に対して、読取終了を通知する事で、リーダ部200が画像データの読取を終了する。そして、給紙モータM2を停止して(S513)、処理を終了する。
【0096】
〔排紙動作〕
図12は、本発明に係る画像読取装置における原稿排紙動作手順の一例を示すフローチャートである。なお、S601〜S607は各ステップを示す。
【0097】
上述した図7に示す処理に基づいて、原稿画像の読取が終了し、原稿後端が読取位置Rより下流に位置して停止している原稿は、給紙モータM2が駆動され、同時に、排紙モータM3が正転駆動される事で、第2搬送ローラ6と排紙ローラ8が駆動され、搬送パス下流側へと搬送される(S601)。
【0098】
そして、排紙センサ13に原稿後端が達したと検知し(S602)、さらに次原稿が無い場合(S603)、読み取られた原稿が給紙モータM2の駆動系から外れたとして、給紙モータM2を停止させる(S604)。
【0099】
但し、次原稿の給紙動作、又は読取動作が同時に行われている場合(S603)は、給紙モータM2を停止しない。
【0100】
その後、カウンタをセットして(S605)、カウントアップしたら(S606)、すなわち、所定量搬送した後、原稿後端が排紙ローラ8を抜けて、排紙トレイ21上に排出されたと判断されると、排紙モータM3を停止し(S607)、排紙ローラ8の駆動を停止して、処理を終了する。
【0101】
〔反転動作〕
図13は、本発明に係る画像読取装置における原稿反転動作手順の一例を示すフローチャートである。なお、S701〜S716は各ステップを示す。
【0102】
まず、原稿画像の読取が終了し、原稿後端が読取位置Rより下流に位置して停止している原稿は、給紙モータM2が駆動され、同時に、排紙モータM3が正転駆動される事で、第2搬送ローラ6と排紙ローラ8が駆動され、搬送パス下流側へと搬送される(S701)。
【0103】
そして、排紙センサ13に原稿後端が達したと検知すると(S702)、読み取られた原稿が給紙モータM2の駆動系から外れたとして、給紙モータM2を停止させる(S703)。その後、カウンタをセットして(S704)、カウントアップしたら(S705)、すなわち、所定量搬送した後、排紙モータM3を停止する事で(S706)、原稿先端は排紙トレイ21上に排出され、原稿後端が排紙ローラ8にニップされた位置で原稿を停止させる。
【0104】
その後、排紙モータM3を逆転駆動して(S707)、排紙ローラ8の搬送方向が逆転される。排紙センサ13に原稿端部が達した事を検知すると(S708)、カウンタをセットして(S709)、カウントアップしたら(S710)、すなわち、所定量搬送した後、排紙モータM3を停止させる(S711)。この時、第2レジストローラ4は、停止しており、スイッチバックされた原稿の先端が第2レジストローラ4にループ形成した状態で突き当てられ、反転搬送中での斜行が補正される。
【0105】
その後、モータM2を起動すると、第2レジストローラ4と第1搬送ローラ5と第2搬送ローラ6が駆動される(S712)。
【0106】
第2レジストローラ4に突き当てられた原稿は、搬送パスの下流側へと搬送され、リードセンサ12まで原稿先端が搬送された事を検知すると(S713)、カウンタをセットして(S714)、カウントアップしたら(S715)、すなわち、所定量搬送した後、給紙モータM2を停止させ(S716)、原稿先端を読取位置Rより上流に停止させて、処理を終了する。
【0107】
〔空送り動作〕
図11を用いて説明した読取動作における、読取開始ステップ(ステップS504)と読取終了ステップ(ステップS512)を行わず、給紙モータM2は同様の動作を行う。
【0108】
ここで、リーダ部200が、ADF100から搬送されてくる原稿画像を読み取る場合は、スキャナユニット209がADF用プラテン201の下に移動して停止し、原稿が読取位置R上を搬送されている間、画像情報を読み取る。しかしながら、図38に示すように、ADF用プラテン201の読取部Rに、ゴミGが何らかの要因で入り込んだ場合、原稿画像Aの画像を読み込むと、読取画像は、読取画像BのようにゴミGの位置に線が現れてしまう。
【0109】
そこで、図4等に示すように、リーダ部200に、電気機械変換素子210によりプラテン201を屈曲振動させて、ゴミGの除去処理を試行する。
【0110】
〔第2実施形態〕
上記第1実施形態では、ADF用プラテン201に1枚の電気機械変換素子210を融着させてプラテン201を屈曲振動させて、ゴミGの除去処理を試行する場合について説明したが、ADF用プラテン201に電気機械変換素子210を複数枚融着して、励振力の強い屈曲振動を発生させてゴミGの除去効果を高めるように構成してもよい。
【0111】
図14は、本発明の第2実施形態を示す画像読取装置の制御構成を説明するブロック図であり、図3と同一のものには同一の符号を付してある。
【0112】
図14において、ADF100は、CPU800、リードオンリメモリ(以下、ROM)801、ランダムアクセスメモリ(以下、RAM)802、出力ポート、及び入力ポートを備えている。ROM801には、制御用プログラムが格納されており、RAM802には、入力データや作業用データが格納されている。また、出力ポートには、分離モータM1、給紙モータM2、排紙モータM3、離間ソレノイドSL、給紙クラッチCLが接続されている。
【0113】
また、CPU800には、ADF用プラテン301に取り付けられた電気機械変換素子310と電気機械変換素子311を駆動するための駆動ドライバ(電気機械変換素子駆動回路)17が出力ポートを介して接続され、その駆動ドライバ17には電気機械変換素子310と電気機械変換素子311がそれぞれ接続されている。これ以外の構成は、第1実施形態の構成と同じなので説明を省略する。
【0114】
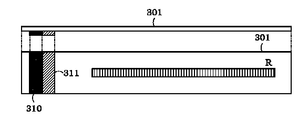
図15〜図17は、本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図であり、図15は、図1に示したADF用プラテン301の振動機構の取り付け状態(ADF用プラテン301に複数枚の電気機械変換素子を接着した状態)に対応する。
【0115】
図15において、Rは画像読取位置であり、310,311は電気機械変換素子を示している。
【0116】
図16は、図15に示したADF用プラテン301と電気機械変換素子310,311との駆動回路例に対応する。
【0117】
図16に示すように、ADF用プラテン301は、電極板312、電極板313、電気機械変換素子310、電気機械変換素子311から構成されている。ADF用プラテン301下面と電極板312上面、電極板312下面と電気機械変換素子310,311上面、電気機械変換素子310,311下面と電極板313上面はそれぞれ固化型の接着剤(不図示)にて融着(結合)されている。
【0118】
電極板312と電極板313は駆動ドライバ17に接続され、CPU800の制御によって電極板312と電極板313の両電極間に、例えば高周波電圧が印加できるようになっている。ADF用プラテン301をGND(接地)とするために電極板312はGNDに接続される。
【0119】
電気機械変換素子310,311は共に平板型の圧電素子であり、図16に示されるように、電気機械変換素子310は矢印314方向に分極されており、電気機械変換素子311は矢印315方向に分極されている。
【0120】
この電気機械変換素子310,311の分極方向が各々異なっているために、この二つの電気機械変換素子310,311に同一の電圧を印加することにより、電気機械変換素子310には矢印方向316に縦振動が励振され、電気機械変換素子311には電気機械変換素子310と逆方向の矢印方向317に縦振動を励振する。
【0121】
そして、駆動ドライバ17によって電極板312、電極板313の両電極間に第1実施形態で説明したように、周波数FB40=32.04(kHz)の高周波電圧を駆動ドライバ17から印加することで、ADF用プラテン301に40次屈曲振動の定在波を励振させることができる。
【0122】
当然のことながら、この2つの電気機械変換素子310,311は、40次屈曲振動の腹位置のほぼ中央(最大振幅位置)に融着されている。つまり、図17に示すように第1実施形態で述べたように、x1、x2、x3、……、x39の位置に電気機械変換素子を分極方向が交互になるように融着すればよい。
【0123】
この構成の場合、電気機械変換素子310,311が互いに屈曲振動の隣り合う腹の位置で逆方向の伸縮を繰り返すので、本発明の第1実施形態の構成からできる屈曲振動よりも強い屈曲振動を得ることができる。
【0124】
同様に、図18に示すように複数の電気機械変換素子をADF用プラテンの読取位置Rの両側に配置することで、より励振力の強い屈曲振動を得ることも可能である。
【0125】
図18は、本発明の第2実施形態を示す画像読取装置の構成を説明する図であり、数の電気機械変換素子をADF用プラテンの読取位置Rの両側に配置した例である。
【0126】
なお、本実施形態において、屈曲振動のモード次数を「40」とする場合について説明したが、これに限ったことではなく、ADF用プラテンの長さ、厚さは自由に選択可能で、その構成に合わせて、屈曲振動のモード次数や高周波電圧の周波数は自由に選択することができる。
【0127】
〔第3実施形態〕
上記第1,第2の実施形態においては、ADF用プラテンの主走査方向の屈曲振動を励振させることについて説明したが、ADF用プラテンの副走査方向への屈曲振動を励振させることでも同様の効果を得ることができる。
【0128】
図19は、本発明の第3実施形態を示す画像読取装置の構成を説明する図であり、ADF用プラテンの副走査方向への屈曲振動を励振させる例であり、図18と同一のものには同一の符号を付してある。
【0129】
つまり、本実施形態で述べた屈曲振動の演算式(上記第(1)式)中において、長さ方向のLの項を、ADF用プラテンの幅方向(副走査方向)の長さWを代入することにより、下記第(2)式が得られる。
【0130】
FBn=(αn2/(2πW2)){√(E/ρ)}(T/2√3)……(2)
ただし、「αn=π/2+n・π」により決定される。
【0131】
また、第(2)式中、nは屈曲振動モードの次数を示し、Lは弾性体の長さを示し、Tは弾性体の厚みを示し、Eは弾性体のヤング率を示し、ρは弾性体の密度を示す。
【0132】
本実施形態の具体例として、ADF用プラテン301の幅を「40(mm)」、厚みを「4(mm)」、プラテン301の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」、4次の屈曲振動(n=4)を励振させると仮定した場合の上記第(2)式の演算結果を下記に示す。
【0133】
「FB40=32.04(kHz)」、「波長=20.0(mm)」となり、この結果より、ADF用プラテン301に励振される40次屈曲振動定在波の腹位置の中心はADF用プラテン301の端部から、「xm=5.00+m・λ/2(mm)」の位置に励振される。なお、mは0〜3までの整数とする。
【0134】
腹の数は「4」であるから、具体的には、「m=0」の時、「x1=5.00(mm)」、「m=1」の時「x2=15.00(mm)」、「m=2」の時「x3=25.00(mm)」、……、「m=3」の時「x4=35.00(mm)」となる。
【0135】
そこで、この腹位置の中心の位置に電気機械変換素子310,311の中心が位置するように、電気機械変換素子310,311をプラテン301の下面側に上述したように接着剤により融着し、この電気機械変換素子310,311に周波数FB40=32.04(kHz)の高周波電圧を駆動ドライバ17から印加することでADF用プラテン301に4次屈曲振動の定在波を励振させることができる。
【0136】
このように、この演算式(上記第(2)式)にADF用プラテンの諸条件を代入し演算した結果に基づいてADF用プラテンを構成することにより、ADF用プラテンの副走査方向への屈曲振動の励振を利用することが可能となる。
【0137】
また、複数の電気機械変換素子をADF用プラテンの読取位置Rの両側に配置することで、より励振力の強い屈曲振動を得ることも可能である。
【0138】
以上述べたように、本実施形態に関して、屈曲振動の腹位置の中心位置と電気機械変換素子の中心位置を合わせたが、屈曲振動の腹の中心位置(最大振幅位置)が融着された電気機械変換素子に含まれていれば、ADF用プラテンには屈曲振動を励振することが可能である。
【0139】
また、本実施形態では、ADF用プラテンに屈曲振動を励振させる事例を説明したが、ブック用プラテンについても同様に構成できることは言うまでも無い。
【0140】
さらに、第1実施形態と第3実施形態と、もしくは、第2実施形態と第3実施形態とを組み合わせて、プラテンガラスの主走査方向の屈曲振動と副走査方向の屈曲振動の両条件を満足する構成でプラテンガラスを振動させる構成を採用することも本発明の適用範囲である。
【0141】
図20は、本発明に係る画像読取装置における第1のゴミ除去状態を説明する図であり、図38と同一のものには同一の符号を付してある。
【0142】
上記第1〜第3実施形態によれば、ゴミGは、プラテンの振動により読取位置Rから読取位置外G1へ移動することが期待され、正常な読取画像Bが得られる。
【0143】
以上説明したように、電気機械変換素子を図1,図4〜図6、図15〜図19に示すように、プラテンに屈曲振動を励起させることにより、図20に示したようなゴミGがプラテンに入り込んだ場合でも、プラテンの振動がゴミGに伝わり、ゴミGはその場に滞留することが出来なくなる。その結果、ゴミGが読取位置Rの幅を超えて移動して、読取画像に線として現れないようになる。
【0144】
また、電気機械変換素子を超音波領域で駆動することで、耳障りな音の発生を防ぐことができる。
【0145】
〔第4実施形態〕
上記第1〜第3実施形態においては、プラテンガラスの主走査方向あるいは副走査方向に屈曲振動を起こしてゴミ除去処理を行う場合について説明したが、プラテンガラスを縦方向に振動させてゴミ除去処理を行えるように構成してもよい。以下、その実施形態について説明する。
【0146】
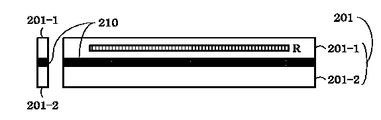
図21〜図24は、本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図であり、図21は、図1に示したADF用プラテン201−1とADF用プラテン201−2との間に電気機械変換素子210が電極板211と電極板212に挟持され状態で配置される。なお、図21の左側に要部断面を示す。
【0147】
図21に示すように、電気機械変換素子210は、画像読取位置R域外に取り付けられており、読取画像に影響を与えることはない位置に設けられる。
【0148】
図22は、図21に示したADF用プラテン201−1,201−2と電気機械変換素子210との駆動回路例に対応する。
【0149】
なお、プラテン201−1下面と電極板211の上面、電極板211の下面と電気機械変換素子210の上面、電気機械変換素子210の下面と電極板212の上面、電極板212の下面とプラテン201−2の上面はそれぞれ固化型の接着剤(図示しない)にて融着(結合)されている。
【0150】
電極板211と電極板212は駆動ドライバ16に接続され、CPU800の制御によって電極板211と電極板212の両電極間に、例えば高周波電圧が印加できるように構成されている。
【0151】
なお、読取位置Rが存在するプラテン201側をGND(接地)とするために電極板211はGNDに接続される。ここで、読取位置Rはプラテン201−2側に存在してもよく、この場合は、電極板212をGND(接地)に接続すればよい。
【0152】
次に、ADF用プラテン201に縦振動を励振させる構成について説明する。
【0153】
電気機械変換素子210は平板型の圧電素子であり、例えばPZT等の圧電素子が用いられる。この電気機械変換素子210は、図22に示すように、矢印213方向に分極されており、駆動ドライバ16によって電気機械変換素子210の両側に電圧を印加することにより、矢印214方向に縦振動を励振する。この縦振動を利用して、ADF用プラテン201に縦振動を励振させるためには、ADF用プラテン201の機械的共震周波数と電気機械変換素子210の電気的共振周波数を一致させる必要がある。
【0154】
まず、弾性体に縦振動を励振するための縦振動の機械的共振周波数FLは、一般的に下記第(3)式で与えられる。
【0155】
FL=(1/2L){√(E/ρ)}……(3)
また、第(3)式中、Lは弾性体の長さを示し、Eは弾性体のヤング率を示し、ρは弾性体の密度を示す。
【0156】
本実施形態の具体例として、ADF用プラテン201の幅方向長さ(副走査方向長さL)を40(mm)、プラテン201の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」を縦振動を励振させると仮定した場合の上記第(3)式の演算結果は、「FL1=21.324(kHz)」となり、この結果より、図22に示すADF用プラテン201に励振される。
【0157】
従って、図22に示すプラテン201の幅方向の長さLを40(mm)となるように構成し、電気機械変換素子210の中心がADF用プラテン201の中心位置(縦振動の節(最小振幅位置)部分)になるように電気機械変換素子210を融着し、この電気機械変換素子210に周波数FL1=21.324(kHz)の高周波電圧を駆動ドライバ16から印加することで、ADF用プラテン201に1次の縦振動を図23に示すように励振させることができる。
【0158】
なお、本実施形態では、プラテン201−1下面と電極板211の上面、電極板211の下面と電気機械変換素子210の上面、電気機械変換素子210の下面と電極板212の上面、電極板212の下面とプラテン201−2の上面はそれぞれ固化型の接着剤(図示しない)にて融着し、さらに、電極板211と電極板212は駆動ドライバ16に接続され、CPU800の制御によって電極板211と電極板の両電極間に、例えば高周波電圧を印加して縦振動を励振する場合について説明したが、図24に示すように、プラテン201−1またはプラテン201−2のどちらか一方のみで構成してもよい。このように縦振動する透過部材が非対象となる場合として本発明の効果が期待できる。
【0159】
〔第5実施形態〕
上記第4実施形態では、プラテン201−1下面と電極板211の上面、電極板211の下面211と電気機械変換素子210の上面、電気機械変換素子210の下面と電極板212の上面、電極板212の下面とプラテン201−2の上面はそれぞれ固化型の接着剤(図示しない)にて融着する場合について説明したが、ADF用プラテン201に電気機械変換素子210を複数枚融着して、励振力の強い屈曲振動を発生させてゴミGの除去効果を高めるように構成してもよい。
【0160】
図25〜図28は、本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図であり、図25は、ADF用プラテン301−1とADF用プラテン301−2との間に電極板を介して複数の電気機械変換素子310,311が挟持され状態で配置される。なお、図25の左側に要部断面を示す。
【0161】
図26は、図25に示したADF用プラテン301−1,301−2と電気機械変換素子310,311との駆動回路例に対応する。
【0162】
図26に示すように、本実施形態では、ADF用プラテン301は、プラテン301−1とプラテン301−2から構成されており、電気機械変換素子310と電気変換素子311は、電極板312、電極板313、電極板314を介してプラテン301−1とプラテン301−2の間に挟持されている。
【0163】
ADF用プラテン301は、プラテン301−1下面と電極板312上面、電極板312下面と電気機械変換素子310上面、電気機械変換素子310下面と電極板313上面、電極板313下面と電気機械変換素子311上面、電気機械変換素子311下面と電極板314上面、電極板314下面とプラテン301−2上面はそれぞれ固化型の接着剤(図示しない)にて融着(結合)されている。
【0164】
電極板312と電極板313と電極板314は駆動ドライバ17に接続され、CPU800の制御によって電極板312と電極板313の両電極間と電極板313と電極板314の両電極間に、例えば高周波電圧が印加できるようになっている。なお、ADF用プラテン301−1とADF用プラテン301−2をGND(接地)とするために、電極板312と電極板314はGNDに接続される。
【0165】
本実施形態において、電気機械変換素子310,311は共に、図26に示すように、電気機械変換素子310は矢印315方向に分極されており、電気機械変換素子311は矢印316方向に分極されている。このように、電気機械変換素子310,311の分極方向が各々異なっているために、この2つの電気機械変換素子310,311に同一の電圧を印加することにより、電気機械変換素子310には、矢印317方向に縦振動が励振され、電気機械変換素子311には電気機械変換素子310と逆方向の矢印318方向に縦振動を励振する。
【0166】
そして、電極板312,314と電極板313の両電極間に第4実施形態で説明したように、「FL1=21.324(kHz)」の高周波電圧を駆動ドライバ17から印加することで、図27に示すようにADF用プラテン301に縦振動を励振させることができる。
【0167】
なお、本実施形態において、2つの電気機械変換素子310,311は、縦振動の節位置のほぼ中央(縦振動の最小振幅位置を含む位置)に融着されている。また、複数の電気機械変換素子を分極方向が交互になるように、交互に融着すれば、電極板の枚数も削減され、かつ、より大きな縦振動を得ることができることはいうまでもない。
【0168】
また、本実施形態では、ADF用プラテン301がADF用プラテン301−1とADF用プラテン301−2から構成される場合について説明したが、図28に示すように、ADF用プラテン301がプラテン301−1とプラテン301−2のどちらか一方のみの構成としてもよいし、縦振動する透過部材が非対象系でも本発明を適用可能であることはいうまでもない。
【0169】
〔第6実施形態〕
上記第4,第5実施形態では、ADF用プラテンを副走査方向の縦振動を励振させる場合について説明したが、ADF用プラテンを主走査方向への縦振動を励振するように構成してもよい。以下、その実施形態について説明する。
【0170】
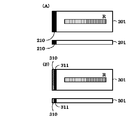
図29,図30は、本発明の第6実施形態を示す画像読取装置の構成を説明する図であり、プラテンの励振機構の要部構成に対応する。
【0171】
本実施形態では、第4実施形態に示した、第(3)式中、
FL=(1/2L){√(E/ρ)})
において、長さ方向のLの項を、ADF用プラテンの幅方向(主走査方向)の長さWを代入することにより、すなわち、下記第(4)式が与えられる。
【0172】
FL=(1/2W){√(E/ρ)}……(4)
具体例として、ADF用プラテン201の幅方向長さ(主走査方向長さW)を「800(mm)」、プラテン201の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」を縦振動を励振させると仮定した場合の上記第(4)式の演算結果は、「FL1=1.066(kHz)」となり、このADF用プラテン長さの中心の位置に電気機械変換素子の中心が位置するように電気機械変換素子を融着し、この電気機械変換素子に上記第(4)式から得られる、周波数FL1=1.066(kHz)の高周波電圧を駆動ドライバ17より印加することで、図29,図30に示すADF用プラテンが励振される。
【0173】
このように、第(4)式に基づいて、ADF用プラテンの諸条件を代入し演算した結果に基づいて、ADF用プラテンおよびその駆動系を構成することにより、ADF用プラテンの主走査方向への縦振動の励振を利用することが可能となる。
【0174】
特に、図29の(A)は、第4実施形態におけるプラテン構成に対して主走査方向に振動を与える場合に対応し、図29の(B)は、第5実施形態におけるプラテン構成に対して主走査方向に振動を与える場合に対応に対応する。
【0175】
また、図30に示す例は、図29の(A)または(B)に示す2枚から構成されるADF用プラテンを1枚構成とした応用例に対応する。
【0176】
〔第7実施形態〕
上記第1〜第6実施形態では、プラテンに振動を与える電気機械変換素子として、縦効果型の圧電素子を利用する場合について説明したが、横効果型の圧電素子を電気機械変換素子で構成してもよい。以下、その実施形態について説明する。
【0177】
図31,図32は、本発明の第7実施形態を示す画像読取装置における構成を説明する図であり、図31は、画像読取装置のプラテンと電気機械変換素子との結合配置構成例に対応し、図32は、画像読取装置のプラテンと電気機械変換素子との駆動回路例に対応する。
【0178】
なお、本実施形態では、横効果型の圧電素子を電気機械変換素子としているが、縦効果型の圧電素子との違いは、縦効果型の圧電素子分極方向と振動方向とが一致するのに対して、横効果型の圧電素子は分極方法と振動方向とが直交する点にある。
【0179】
図31において、ADF用プラテン401には横効果型の圧電素子で構成され電気機械変換素子410を結合して、後述するように接着剤により融着(結合)されている。
【0180】
図32において、ADF用プラテン401は、電極板411、電極板412、横効果型の圧電素子から構成される電気機械変換素子410を備えている。
【0181】
そして、ADF用プラテン401右面と電極板411左面、電極板411右面と電気機械変換素子410左面、電気機械変換素子410右面と電極板412左面はそれぞれ固化型の接着剤(図示しない)にて融着されている。
【0182】
電極板411と電極板412は駆動ドライバ18に接続され、CPU800の制御の下で電極板411と電極板412の両電極間に、例えば高周波電圧が印加できるように構成されている。
【0183】
特に、電気機械変換素子410は、平板型の横効果型の圧電素子であり、図32に示すように、電気機械変換素子410は、矢印413方向(横方向)に分極されている。
【0184】
この電気機械変換素子410に電圧を印加することにより、電気機械変換素子410には、矢印414方向に縦振動が励振される。そして、駆動ドライバ18によって、電極板411、電極板412の両電極間に第4実施形態で説明したように、周波数FL1=21.324(kHz)の高周波電圧を駆動ドライバ18から印加することで、ADF用プラテン401の副走査方向に1次の縦振動を励振させることができる。
【0185】
なお、本実施形態では、当然のことながら、電気機械変換素子410は、ADF用プラテン401のほぼ中央に融着されており、第4実施形態で上述したように、この位置は、縦振動の節位置(最小振幅位置)となる。
【0186】
また、上記縦振動の励振を強める場合には、プラテンと電気機械変換素子410との構成を図33,図34に示す構成とすればよい。
【0187】
〔第8実施形態〕
図33,図34は、本発明の第8実施形態を示す画像読取装置における構成を説明する図であり、図33は、画像読取装置のプラテンと電気機械変換素子との結合配置構成例に対応し、図34は、画像読取装置のプラテンと電気機械変換素子との駆動回路例に対応する。
【0188】
図33において、ADF用プラテン401には横効果型の圧電素子で構成される電気機械変換素子410−1と電気機械変換素子410−2を結合して、後述するように接着剤により融着されている。
【0189】
図34において、ADF用プラテン401は、電極板411−1,411−2、電極板412−1,412−2、横効果型の圧電素子から構成される電気機械変換素子410−1と電気機械変換素子410−2を備えている。
【0190】
そして、ADF用プラテン401右面と電極板411−1左面、電極板411−1右面と電気機械変換素子410−1左面、電気機械変換素子410−1右面と電極板412−1左面はそれぞれ固化型の接着剤(図示しない)にて融着されている。
【0191】
電極板411−1と電極板412−1は駆動ドライバ18に接続され、CPU800の制御の下で電極板411−1と電極板412−1の両電極間に、例えば高周波電圧が印加できるように構成されている。なお、410−2についても同様である。
【0192】
特に、電気機械変換素子410−1,410−2は、平板型の横効果型の圧電素子であり、図34に示すように、電気機械変換素子410−1,410−2は、矢印413−1,矢印413−2方向(横方向)に分極されている。
【0193】
この電気機械変換素子410−1,410−2に電圧を印加することにより、電気機械変換素子410−1,410−2には、矢印414方向に縦振動が強く励振される。そして、駆動ドライバ18によって、電極板411−1,411−2、電極板412−1,412−2の両電極間に第4実施形態で説明したように、周波数FL1=21.324(kHz)の高周波電圧を駆動ドライバ18から印加することで、ADF用プラテン401の副走査方向に1次の縦振動を励振させることができる。
【0194】
この場合、ADF用プラテン401の形状は、幅方向長さ(副走査方向長さL)を「40(mm)」、プラテン401の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」を縦振動を励振させると仮定した場合の上記第(3)式の演算結果は、「FL1=21.324(kHz)」となり、この結果より、図33に示すADF用プラテン401に励振される。
【0195】
なお、本実施形態では、当然のことながら、電気機械変換素子410は、ADF用プラテン401のほぼ中央に融着されており、第7実施形態で上述したように、この位置は、縦振動の節位置(最小振幅位置)となる。
【0196】
図35は、本発明に係る画像読取装置における第2のゴミ除去状態を説明する図であり、図38と同一のものには同一の符号を付してある。
【0197】
図に示すように、ゴミGは、プラテンの振動により読取位置Rから読取位置外G1へ移動することが期待され、正常な読取画像Bが得られる。
【0198】
本実施形態によれば、縦振動の節位置の中心位置と電気機械変換素子の中心位置が、縦振動の節位置(最小振動位置)が融着された電気機械変換素子に含まれていれば、ADF用プラテンに縦振動を励振させて、プラテン上の読取位置に付着したゴミを該振動により読取位置外へ移動させて、読取画像不良(原稿画像にない幻縦線画像現象)となる事態を自動的に回避することが可能となる。
【0199】
なお、上記第4〜第8実施形態において、縦振動を励振にさせる構成としては、上記第4〜第8実施形態に限定されることはなく、ADF用プラテンの長さ、種類、電気機械変換素子の種類は他の材料や他のデバイスを自由に選択可能であり、その変形構成に合わせて縦振動の高周波電圧の周波数を決定することはいうまでもない。
【0200】
また、本実施形態では、ADF用プラテンに屈曲振動を励振させる事例を説明したが、ブック用プラテンについても同様に構成できることは言うまでも無い。
【0201】
さらに、第4実施形態と第7実施形態と、もしくは、第5実施形態と第6施形態とを組み合わせて、プラテンガラスの主走査方向の縦振動と副走査方向の縦振動の両条件を満足する構成でプラテンガラスを振動させる構成を採用することも本発明の適用範囲である。
【0202】
以上説明したように、電気機械変換素子を図1,図21〜図34に示すように、プラテンに縦振動を励起させることにより、図35に示したようなゴミGがプラテンに入り込んだ場合でも、プラテンの振動がゴミGに伝わり、ゴミGはその場に滞留することが出来なくなる。その結果、ゴミGが読取位置Rの幅を超えて移動して、読取画像に線として現れないようになる。
【0203】
また、電気機械変換素子を超音波領域で駆動することで、耳障りな音の発生を防ぐことができる。
【0204】
さらに、本発明は、自動原稿搬送装置を備えた画像読取装置のみでなく、該画像読取装置を具備した複写機等の画像形成装置等にも適用可能である。
【0205】
また、電気機械変換素子を駆動してADFプラテンを振動させるタイミングは、原稿読取時に限られるものではなく、ADF開閉時や、電源投入時、その他のタイミングであってもよい。
【0206】
また、上記第1実施形態〜第8実施形態のいずれかを組み合わせた構成も本発明に含まれるものである。
【0207】
以下、図36に示すメモリマップを参照して本発明に係る画像読取装置で読み出し可能なデータ処理プログラムの構成について説明する。
【0208】
図36は、本発明に係る画像読取装置で読み出し可能な各種データ処理プログラムを格納する記憶媒体のメモリマップを説明する模式図である。
【0209】
なお、特に図示しないが、記憶媒体に記憶されるプログラム群を管理する情報、例えばバージョン情報,作成者等も記憶され、かつ、プログラム読み出し側のOS等に依存する情報、例えばプログラムを識別表示するアイコン等も記憶される場合もある。
【0210】
さらに、各種プログラムに従属するデータも上記ディレクトリに管理されている。また、インストールするプログラムやデータが圧縮されている場合に、解凍するプログラム等も記憶される場合もある。
【0211】
本実施形態における図7〜図13に示す機能が外部からインストールされるプログラムによって、ホストコンピュータにより遂行されていてもよい。そして、その場合、CD−ROMやフラッシュメモリやFD等の記憶媒体により、あるいはネットワークを介して外部の記憶媒体から、プログラムを含む情報群を出力装置に供給される場合でも本発明は適用されるものである。
【0212】
以上のように、前述した実施形態の機能を実現するソフトウエアのプログラムコードを記録した記憶媒体を、システムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(またはCPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、本発明の目的が達成されることは言うまでもない。
【0213】
この場合、記憶媒体から読み出されたプログラムコード自体が本発明の新規な機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0214】
プログラムコードを供給するための記憶媒体としては、例えば、フロッピー(登録商標)ディスク,ハードディスク,光ディスク,光磁気ディスク,CD−ROM,CD−R,DVD−ROM,磁気テープ,不揮発性のメモリカード,ROM,EEPROM,シリコンディスク等を用いることができる。
【0215】
また、コンピュータが読み出したプログラムコードを実行することにより、前述した実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0216】
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPU等が実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0217】
また、本発明は、複数の機器から構成されるシステムに適用しても、1つの機器からなる装置に適用してもよい。また、本発明は、システムあるいは装置にプログラムを供給することによって達成される場合にも適応できることは言うまでもない。この場合、本発明を達成するためのソフトウエアによって表されるプログラムを格納した記憶媒体を該システムあるいは装置に読み出すことによって、そのシステムあるいは装置が、本発明の効果を享受することが可能となる。
【0218】
さらに、本発明を達成するためのソフトウエアによって表されるプログラムをネットワーク上のデータベースから通信プログラムによりダウンロードして読み出すことによって、そのシステムあるいは装置が、本発明の効果を享受することが可能となる。
【0219】
【発明の効果】
以上説明したように、本発明に係る第1〜13の発明によれば、原稿送り装置の原稿搬送路と読取手段の間にあり原稿の画像を透過するように配置された透過部材に結合された一つもしくは複数の電気機械変換素子によって前記透過部材に屈曲振動又は縦振動を励振させるので、自動原稿搬送装置で原稿を搬送中に読み取る方式(流し読み方式)において、原稿台ガラスに外部からゴミが進入した場合でも、原稿台ガラスの振動がゴミに伝わり、ゴミはその場に滞留することが出来なくなり、その結果、ゴミが流し読みによる読取部の幅を超えて移動して、ゴミを画像として誤って読み取ってしまい、読取画像に線として現れることを防止することができる等の効果を奏する。
【図面の簡単な説明】
【図1】本発明の第1実施形態を示す画像読取装置の構成を説明する概略断面図である。
【図2】本発明の第1実施形態を示す画像読取装置の構成を説明する概略断面図である。
【図3】図1,図2に示したADFの制御構成を説明するブロック図である。
【図4】本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図である。
【図5】本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図である。
【図6】本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図である。
【図7】本発明に係る画像読取装置における第1の制御手順を示すフローチャートである。
【図8】本発明に係る画像読取装置における原稿分離動作手順の一例を示すフローチャートである。
【図9】本発明に係る画像読取装置における原稿給紙動作手順の一例を示すフローチャートである。
【図10】本発明に係る画像読取装置における原稿サイズチェック動作手順の一例を示すフローチャートである。
【図11】本発明に係る画像読取装置における原稿読取動作手順の一例を示すフローチャートである。
【図12】本発明に係る画像読取装置における原稿排紙動作手順の一例を示すフローチャートである。
【図13】本発明に係る画像読取装置における原稿反転動作手順の一例を示すフローチャートである。
【図14】本発明の第2実施形態を示す画像読取装置の制御構成を説明するブロック図である。
【図15】本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図である。
【図16】本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図である。
【図17】本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図である。
【図18】本発明の第2実施形態を示す画像読取装置の構成を説明する図である。
【図19】本発明の第3実施形態を示す画像読取装置の構成を説明する図である。
【図20】図20は、本発明に係る画像読取装置における第1のゴミ除去状態を説明する図である。
【図21】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図22】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図23】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図24】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図25】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図26】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図27】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図28】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図29】本発明の第6実施形態を示す画像読取装置の構成を説明する図である。
【図30】本発明の第6実施形態を示す画像読取装置の構成を説明する図である。
【図31】本発明の第7実施形態を示す画像読取装置の構成を説明する図である。
【図32】本発明の第7実施形態を示す画像読取装置の構成を説明する図である。
【図33】本発明の第8実施形態を示す画像読取装置の構成を説明する図である。
【図34】本発明の第8実施形態を示す画像読取装置の構成を説明する図である。
【図35】本発明に係る画像読取装置における第2のゴミ除去状態を説明する図である。
【図36】本発明に係る画像読取装置で読み出し可能な各種データ処理プログラムを格納する記憶媒体のメモリマップを説明する模式図である。
【図37】従来の画像読取装置の読取機構の斜視図である。
【図38】図37に示した画像読取装置における原稿画像と読取画像とゴミ画像との関係を説明する図である。
【符号の説明】
16 電気機械変換素子駆動回路
100 自動原稿送り装置
200 リーダ部
201 ADF用プラテン
203 ランプ
204,205,206 ミラー
207 レンズ
208 CCDセンサ
209 スキャナユニット
210,310,311 電気機械変換素子
800 CPU
801 ROM
802 RAM
【発明の属する技術分野】
本発明は、自動原稿搬送装置を備え、原稿を搬送中に読み取る方式が可能な画像読取装置および画像読取装置の制御方法に関するものである。
【0002】
【従来の技術】
従来の画像読取装置は、自動原稿搬送装置により搬送された原稿を原稿台ガラス上に載置して、読取用の光学系を所定方向に走査することで、原稿画像を読み取っていた(固定読み方式)。また、読取用の光学系を固定し、自動原稿搬送装置で、原稿を搬送中に読み取る方式が知られている(流し読み方式)。
【0003】
このような原稿を搬送中に読み取る方式の画像読取装置では、原稿台ガラス上に外部からゴミが進入した場合、光学系が固定であるため、同じゴミを読み続け、あたかも直線であるかのように、画像を読み取ってしまうため、原稿台ガラスに振動を与えることで、ゴミを画像読取部上から移動させるものが知られている。
【0004】
【発明が解決しようとする課題】
図37は、従来の画像読取装置の読取機構の斜視図であり、図38は、図37に示した画像読取装置における原稿画像と読取画像とゴミ画像との関係を説明する図である。
【0005】
図37において、リーダ部500が、図示しない自動原稿搬送装置(ADF)から搬送されてくる原稿画像A(図38参照)を読み取る場合は、スキャナユニット509がADF用プラテン501の下に移動して停止し、原稿2001が読取位置R上を搬送されている間、画像情報を読み取る。
【0006】
しかしながら、図38に示すようにADF用プラテン501の読取部RにゴミGが何らかの要因で入り込んだ場合、原稿画像Aの画像を読み込むと、読取画像は読取画像BのようにゴミGが位置Rに停止しているため、読取画像としては線画像GIとなって現れてしまい、どんな原稿を読み込んでも、該ゴミGがADF用プラテン501から排除されない限り、読取不良となってしまう。
【0007】
本発明は、上記の問題点を解決するためになされたもので、本発明の目的は、原稿送り装置の原稿搬送路と読取手段の間にあり原稿の画像を透過するように配置された透過部材に結合された一つもしくは複数の電気機械変換素子によって前記透過部材に屈曲振動又は縦振動を励振させることにより、自動原稿搬送装置で原稿を搬送中に読み取る方式(流し読み方式)において、原稿台ガラスに外部からゴミが進入した場合でも、ゴミを画像として誤って読み取ってしまうのを防ぐことができる画像読取装置および画像読取装置の制御方法を提供することである。
【0008】
【課題を解決するための手段】
本発明に係る第1の発明は、複数の原稿を順次搬送する自動原稿送り装置(図1に示す原稿搬送装置(ADF)100)と、前記自動原稿送り装置から搬送された原稿の画像を搬送中に読み取る読取手段(図1に示すスキャナユニット209,ミラー204,205,206,レンズ207,CCDセンサ208)と、前記自動原稿送り装置の原稿搬送路と前記読取手段の間にあり原稿の画像を透過するように配置された透過部材(図1,図2,図4〜図6,図21〜図24に示すADF原稿用プラテンガラス201,図14〜図20,図25〜図28に示すADF原稿用プラテンガラス301,図31〜図34に示すADF原稿用プラテンガラス401)とを備えた画像読取装置において、前記透過部材に結合された一つもしくは複数の電気機械変換素子(図2,図4〜図6,図21〜図24に示す電気機械変換素子210,図14〜図20,図25〜図28に示す電気機械変換素子310,311,図31〜図34に示す電気機械変換素子410)と、前記電気機械変換素子に高周波電圧を印加する電圧供給手段(図3に示す電気機械変換素子駆動回路16,図14に示す電気機械変換素子駆動回路17)と、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に振動を励振させる制御手段(図3,図14に示すCPU800)とを有することを特徴とする。
【0009】
本発明に係る第2の発明は、前記制御手段(図3,図14に示すCPU800)は、前記一つもしくは複数の電気機械変換素子(図3〜図6に示す電気機械変換素子210,図14〜図20に示す電気機械変換素子310,311)と前記電圧供給手段によって前記透過部材に屈曲振動を励振させることを特徴とする。
【0010】
本発明に係る第3の発明は、前記一つもしくは複数の電気機械変換素子(図3〜図6に示す電気機械変換素子210,図14〜図20に示す電気機械変換素子310,311)は、前記制御手段により励振された前記透過部材の屈曲振動の最大振幅位置を含む位置(図6に示す位置,図17,図18に示す位置)にそれぞれ結合されることを特徴とする。
【0011】
本発明に係る第4の発明は、前記制御手段(図3,図14に示すCPU800)は、前記一つもしくは複数の電気機械変換素子(図21〜図24に示す電気機械変換素子210,図25〜図28に示す電気機械変換素子310,311,図31〜図34に示す電気機械変換素子410)と前記電圧供給手段によって前記透過部材に縦振動を励振させることを特徴とする。
【0012】
本発明に係る第5の発明は、前記一つもしくは複数の電気機械変換素子(図21〜図24に示す電気機械変換素子210,図25〜図28に示す電気機械変換素子310,311,図31〜図34に示す電気機械変換素子410)は、前記制御手段により励振された前記透過部材の縦振動の最小振幅位置を含む位置にそれぞれ結合されることを特徴とする。
【0013】
本発明に係る第6の発明は、前記透過部材(図21〜図24に示すADF原稿用プラテンガラス201,図25〜図28に示すADF原稿用プラテンガラス301)は、第1の透過部材(図21〜図24に示すプラテン201−1,図25〜図28に示すプラテン301−1)と第2の透過部材(図21〜図24に示すプラテン201−2,図25〜図28に示すプラテン301−2)から構成され、前記一つもしくは複数の電気機械変換素子(図21〜図24に示す電気機械変換素子210,図25〜図28に示す電気機械変換素子310,311)は、該第1の透過部材と第2の透過部材の間に結合されることを特徴とする。
【0014】
本発明に係る第7の発明は、前記一つもしくは複数の電気機械変換素子(図31〜図34に示す電気機械変換素子410)は、前記透過部材の画像読取平面と平行する面に結合されることを特徴とする。
【0015】
本発明に係る第8の発明は、前記制御手段(図3,図14に示すCPU800)は、前記透過部材の主走査方向の機械的共振周波数とほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする。
【0016】
本発明に係る第9の発明は、前記制御手段(図3,図14に示すCPU800)は、前記透過部材の副走査方向の機械的共振周波数とほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする。
【0017】
本発明に係る第10の発明は、前記制御手段(図3,図14に示すCPU800)は、前記透過部材の主走査方向の機械的共振周波数と副走査方向の機械的共振周波数と各々ほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする。
【0018】
本発明に係る第11の発明は、複数の原稿を順次搬送する自動原稿送り装置と、前記自動原稿送り装置から搬送された原稿の画像を搬送中に読み取る読取手段と、前記自動原稿送り装置の原稿搬送路と前記読取手段の間にあり原稿の画像を透過するように配置された透過部材と、前記透過部材に結合された一つもしくは複数の電気機械変換素子と、前記電気機械変換素子に高周波電圧を印加する電圧供給手段とを備えた画像読取装置の制御方法において、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に振動を励振させる振動工程(図7のmain2の振動開始〜main20の振動停止までの振動工程)を有することを特徴とする。
【0019】
本発明に係る第12の発明は、前記振動工程は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に屈曲振動を励振させることを特徴とする。
【0020】
本発明に係る第13の発明は、前記振動工程は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に縦振動を励振させることを特徴とする。
【0021】
【発明の実施の形態】
〔第1実施形態〕
図1,図2は、本発明の第1実施形態を示す画像読取装置の構成を説明する概略断面図である。
【0022】
図1、図2において、原稿搬送装置であるADF100は、原稿トレイ20上に表面を上に向けてセットされた原稿束Sからピックアップローラ1により、最上位の原稿から分離部2へと繰り出される。分離部2は、上方に分離ローラ、下方に分離パッドが配置されており、原稿束Sの最上紙より一枚ずつ分離を行う。
【0023】
片面原稿で表面の画像を読み取る場合は、分離された原稿は、第1レジストローラ3にて分離搬送中の斜行補正を行った後、第1レジストローラ3から第2レジストローラ4、第1搬送ローラ5により搬送され、読取位置Rを搬送されている間に表面の画像が読み取られる。そして、第2搬送ローラ6から排紙ローラ8により、排紙トレイ21上に原稿表面を下に向けて順番に排出される。
【0024】
また、両面原稿で表裏両面の画像を読み取る場合は、分離された原稿は、第1レジストローラ3にて分離搬送中の斜行補正を行った後、第2レジストローラ4から第1搬送ローラ5、第2搬送ローラ6により搬送され、読取位置Rを搬送されている間に表面の画像が読み取られる。そして、第2搬送ローラ6から排紙ローラ8により、一旦、原稿端部が排紙トレイ21上に搬送され、読取後端側が排紙ローラ8にニップされた状態で搬送が停止される。
【0025】
その後、原稿をスイッチバック搬送し、第2レジストローラ4にて、再度斜行補正を行った後、第1搬送ローラ5、第2搬送ローラ6により搬送され、読取位置Rを再度搬送されている間に裏面の画像が読み取られる。
【0026】
しかし、このまま第2搬送ローラ6から排紙ローラ8により、排紙トレイ21上に原稿表面を上に向けて排出すると、原稿トレイ20上にセットされた面順と異なってしまう。
【0027】
よって、裏面を読み取られた原稿は、第2搬送ローラ6、排紙ローラ8により、再度原稿端部が排紙トレイ21上に搬送され、読取後端側が排紙ローラ8にニップされた状態で搬送が停止され、スイッチバック搬送し、第2レジストローラ4、第1搬送ローラ5、第2搬送ローラ6により搬送された後、排紙ローラ8により排紙トレイ21上に表面を下に向けて順番に排出される。
【0028】
ただし、読取位置Rを搬送されている間であっても、この間は、原稿画像の読取は行われない。
【0029】
ここで、ピックアップローラ1、分離部2の分離ローラ、第1レジストローラ3は、分離モータM1で駆動され、第2レジストローラ4、第1搬送ローラ5、第2搬送ローラ6は給紙モータM2で駆動され、排紙ローラ8は、排紙モータM3で駆動される。
【0030】
リーダ部200は、原稿に記録された画像情報を光学的に読取、光電変換して画像データとして入力するものであり、ADF原稿用プラテンガラス201(以下、ADFプラテン)、ブック原稿用プラテンガラス202(以下、ブック用プラテン)、ランプ203とミラー204を有するスキャナユニット209、ミラー205、206、レンズ207、CCDセンサ208等を有している。
【0031】
リーダ部200は、ADF100から搬送されてくる原稿画像を読み取る場合は、スキャナユニット209をADF用プラテン201の下に移動して停止させ、原稿が読取位置R上を搬送されている間、画像情報を読み取る。
【0032】
また、ブック用プラテン202上に載置された原稿の画像を読み取る場合は、スキャナユニット209を図示しない原稿セット基準から副走査方向に移動させ、原稿の画像情報を読み取る。
【0033】
画像情報の読取は、ランプ203が点灯し原稿を照射する。原稿からの反射光は、ミラー204、205、206及びレンズ207を介して、CCDセンサ208に入力される。そして、CCDセンサ208に入力された原稿からの反射光は、ここで光電変換等の電気処理が行われ、通常のデジタル処理が施される。
【0034】
なお、本発明はリーダ部200と、原稿搬送装置(ADF)100が一体化された読取装置としても適用可能である。
【0035】
図3は、図1,図2に示したADF100の制御構成を説明するブロック図である。
【0036】
図3において、中央演算処理装置である制御手段(以下、CPU)800、リードオンリメモリ(以下、ROM)801、ランダムアクセスメモリ(以下、RAM)802、出力ポート、及び入力ポートを備えている。
【0037】
ROM801には、制御用プログラムが格納されており、RAM802には、入力データや作業用データが格納されている。また、出力ポートには、分離モータM1、給紙モータM2、排紙モータM3、離間ソレノイドSL、給紙クラッチCLが接続されており、入力ポートには、分離後センサ10、レジストセンサ11、リードセンサ12、排紙センサ13、原稿検知センサ14、原稿長検知センサ15、原稿幅検知センサ810がそれぞれ接続されている。
【0038】
CPU800は、ROM801に格納された制御プログラムにしたがって分離モータM1、給紙モータM2、排紙モータM3、離間ソレノイドSL、給紙クラッチCL、電気機械変換素子210の各々の駆動を制御する。CPU800は、図示しないリーダ部200の中央演算処理装置(CPU)とシリアル通信を行い、リーダ部200との間で制御データの授受を行うようになっている。
【0039】
なお、本発明はリーダ部200と、原稿搬送装置100が一体化された読取装置として適用する場合は、通信を行うことなく、1つのCPUで構成しても良い。
【0040】
また、CPU800には、ADF用プラテン201に取り付けられた電気機械変換素子210を駆動するための駆動ドライバ(電気機械変換素子駆動回路)16が出力ポートを介して接続され、その駆動ドライバ16には電気機械変換素子210が接続されている。
【0041】
図4〜図6は、本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図であり、図4は、図1に示したADF用プラテン201の振動機構の取り付け状態に対応する。
【0042】
図4に示すように、電気機械変換素子210は、画像読取位置R域外に取り付けられており、読取画像に影響を与えることはない位置に設けられる。
【0043】
図5は、図4に示したADF用プラテン201と電気機械変換素子210との駆動回路例に対応する。
【0044】
図5に示すように、ADF用プラテン201は、電極板211、電極板212、電気機械変換素子210から構成されている。ADF用プラテン201下面と電極板211上面、電極板211下面と電気機械変換素子210上面、電気機械素子210下面と電極板212上面はそれぞれ固化型の接着剤(不図示)にて融着(結合)されている。
【0045】
また、電極板211と電極板212は駆動ドライバ16に接続され、CPU800の制御によって電極板211と電極板212の両電極間に、例えば高周波電圧が印加できるようになっている。ADF用プラテン201をGND(接地)とするために電極板211はGNDに接続される。
【0046】
次に、ADF用プラテン201に屈曲振動の定在波を励振させるための構成について述べる。
【0047】
図6は、図5に示した電極板211と電極板212により構成される振動駆動回路により励振されるADF用プラテン201の屈曲振動の定在波の一例に対応する。
【0048】
図5に示した電気機械変換素子210は平板型の圧電素子であり、例えば、PZT等の圧電素子等が用いられる。この電気機械変換素子210は、図5に示されるような矢印213方向に分極されており、駆動ドライバ16によって電気機械変換素子210の両側に電圧を印加することにより、図5の矢印214方向に縦振動を励振する。
【0049】
この縦振動を利用してADF用プラテン201に屈曲振動の定在波を励振させるためには、ADF用プラテン201の機械的共振周波数と電気機械変換素子210の電気的共振周波数を一致させる必要がある。
【0050】
まず、弾性体に屈曲振動の定在波を励振する為のn次屈曲振動の機械的共振周波数FBnは、一般的に下記第(1)式で与えられる。
【0051】
FBn=(αn2/(2πL2)){√(E/ρ)}(T/2√3)……(1)
ただし、αn=π/2+n・πにより決定される。
【0052】
また、第(1)式中、nは屈曲振動モードの次数を示し、Lは弾性体の長さを示し、Tは弾性体の厚みを示し、Eは弾性体のヤング率を示し、ρは弾性体の密度を示す。
【0053】
本実施形態の具体例として、ADF用プラテン201の長さを「398(mm)」、厚みを「4(mm)」、プラテン201の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」、40次の屈曲振動(n=40)を励振させると仮定した場合の上記第(1)式の演算結果を下記に示す。
【0054】
「FB40=32.04(kHz)」、「波長=19.9(mm)」となり、この結果より、ADF用プラテン201に励振される40次屈曲振動定在波の腹位置の中心はADF用プラテン201の端部から、「xm=4.98+m・λ/2(mm)」の位置に励振される。なお、mは0〜39までの整数とする。
【0055】
腹の数は「40」であるから、具体的には、「m=0」の時、「x1=4.98(mm)」、「m=1」の時「x2=14.93(mm)」、「m=2」の時「x3=24.88(mm)」、……、「m=39」の時「x40=393.03(mm)」となる。
【0056】
そこで、この腹位置の中心の位置(最大振幅位置)に電気機械変換素子210の中心が位置するように、図3に示した電気機械変換素子210をプラテン201の下面側に上述したように接着剤により融着し、この電気機械変換素子210に周波数FB40=32.04(kHz)の高周波電圧を駆動ドライバ16から印加することでADF用プラテン201に40次屈曲振動の定在波を励振させることができる。
【0057】
ここで、次数mが偶数の場合、屈曲振動の腹位置の変位がADF用プラテン201の上方向への振幅であるとすると、次数mが奇数の場合は、屈曲振動の変位はADF用プラテン201の下方向への振幅となる。
【0058】
逆に、次数mが偶数の場合の腹位置の変位がADF用プラテン201の下方向への振幅であるとすると、次数mが奇数の場合の変位は、図6に示すようにADF用プラテン201の上方向への振幅となる。
【0059】
図7は、本発明に係る画像読取装置における第1の制御手順を示すフローチャートであり、本実施形態における読取制御におけるメイン処理に対応する。なお、main1〜main20は各ステップを示す。
【0060】
ADFはCPU800により、原稿トレイ20上に原稿がセットされたか否か、更には、図示しない画像読取装置本体の操作部にあるスタートキーが押し下げられたか否かを繰り返し判定しつつ待機状態となっている(main1)。なお、原稿がセットされたか否かのCPU800による判定は、原稿検知センサ14の検出結果に基づいてなされる。
【0061】
そして、判定の結果、原稿が原稿トレイ20にセットされており、且つ、スタートキーが押し下げられた場合には、CPU800からの制御信号が駆動ドライバ16に送信される。この制御信号により駆動ドライバ16は電気機械変換素子210に高周波電圧を印加する。これにより、ADF用プラテン201には屈曲振動の定在波が励振され、ADF用プラテン201が振動を開始する(main2)。
【0062】
この振動により、ADF用プラテン201上のゴミGを除去することができる。また、同時に、片面原稿モードであるか両面モードであるかの判別を行う(main3)。
【0063】
そして、ステップmain3で、片面原稿モードであると判別した場合は、片面モードの場合、原稿トレイ20より分離動作(詳細は後述する図8に示す)を開始し(main4)、給紙動作(詳細は後述する図9に示す)を行い(main5)、読取開始前に原稿サイズを判別する(詳細は後述する図10に示す)(main6)。
【0064】
そして、読取動作(詳細は後述する図11に示す)を行い(main7)、排紙動作(詳細は後述する図12に示す)を行い(main8)、排紙トレイ21へと原稿を順次排出する。
【0065】
なお、原稿サイズの判別(原稿サイズチェック)は、後述する図10に示すように、図示しない原稿トレイ20上での規制ガイド板の幅情報と給紙動作完了時点での、分離センサ10の状態により判別する。
【0066】
一方、ステップmain3で、両面原稿モードであると判別した場合は、原稿トレイ20より分離動作を開始し(main9)、給紙動作(main10)、片面モードと同様に原稿サイズを判別する(main11)。
【0067】
そして、初めに表面の読取動作を行い(main12)、反転動作(詳細は後述する図13に示す)を行い(main13)、給紙動作を開始し(main14)、その後、裏面の読取動作を行い(main15)、反転動作を行い(main16)、給紙動作を開始し(main17)、空送り動作を行い(main18)、排紙動作を行って(main19)、排紙トレイ21へと原稿を排出する。
【0068】
そして、原稿の排紙動作の完了後、CPU800からの制御信号が駆動ドライバ16に送信される。この制御信号により駆動ドライバ16は電気機械変換素子210に印加している高周波電圧の印加を停止する。これにより、ADF用プラテン201に励振されていた屈曲振動の励振が停止され(main20)、処理を終了する。
【0069】
〔分離動作〕
図8は、本発明に係る画像読取装置における原稿分離動作手順の一例を示すフローチャートである。なお、S301〜S310は各ステップを示す。
【0070】
原稿検知センサ14の状態で、原稿トレイ20上に原稿があると判断した場合、分離モータM1を正転駆動すると同時に給紙クラッチCLをONして、図示しないピックアップローラ1を上下動させるピックアップアームを駆動し、原稿トレイ20上の原稿束Sの最上紙にピックアップローラ1が接するまで降下する。同時に、ピックアップローラ1と分離部2の分離ローラが給紙方向に駆動され(S301)、最上紙のみが分離部2から搬送パスへと分離される。
【0071】
そして、分離後センサ10まで分離された原稿の先端が達した事を検知すると(S302)、原稿トレイ20上の原稿束Sから原稿が分離された事を認識する。その後、レジストセンサ11まで原稿の先端が達した事を検知すると(S303)、カウンタをセットして(S304)、カウントアップしたら(S305)、すなわち、所定量搬送した後、分離モータM1を停止(OFF)させる(S306)。この時、第1レジストローラ3は、停止しており、分離された原稿の先端が第1レジストローラ3にループ形成した状態で突き当てられ、分離搬送途中での斜行が補正される。
【0072】
その後、給紙クラッチCLをOFFして、分離モータM1を逆転駆動する事(S307)で、給紙ローラ1、及び分離ローラの駆動が切られ、第1レジストローラ3が駆動されて、斜行補正された原稿が更に下流へと搬送される。
【0073】
そして、カウンタをセットして(S308)、カウントアップしたら(S309)、すなわち、第1レジストローラ3から所定量搬送した後、分離モータM1を停止させ(S310)、処理を終了する。この時、原稿先端部は、第2レジストローラ4より上流位置で停止している。
【0074】
〔給紙動作〕
図9は、本発明に係る画像読取装置における原稿給紙動作手順の一例を示すフローチャートである。なお、S401〜S407は各ステップを示す。なお、給紙動作は、分離パスからの給紙動作と反転パスからの給紙動作とがある。
【0075】
まず、分離パスからの給紙動作であるかどうかを判定して(S401)、分離パスからの給紙動作であると判定した場合、分離モータM1を逆転駆動して(S402)、ステップS403へ進む。
【0076】
一方、ステップS401で、分離パスからの給紙動作でないと判定した場合は、第1レジストローラ3を駆動すると共に、給紙モータM2を起動して、第2レジストローラ4と第1搬送ローラ5と第2搬送ローラ6を駆動する(S403)。なお、反転パスからの給紙動作の場合は、給紙モータM2のみを起動する。
【0077】
そして、第2レジストローラ4の上流に位置する原稿は、給紙モータM2によって駆動される第2レジストローラ4へと搬送され、リードセンサ12まで原稿先端が搬送された事をリードセンサがONすることにより検知すると(S404)、カウンタをセットして(S405)、カウントアップしたら(S406)、すなわち、所定量搬送した後、給紙モータM2を停止させるとともに、原稿先端を読取位置Rより上流に停止させ(S407)、処理を終了する。
【0078】
この時、分離パスからの給紙動作であった場合は、分離モータM1も停止させる。
【0079】
〔原稿サイズチェック〕
図10は、本発明に係る画像読取装置における原稿サイズチェック動作手順の一例を示すフローチャートである。なお、S901〜S919は各ステップを示す。
【0080】
まず、ステップS901において、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A4」であるか否かを判定し、幅データが「A4」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S902)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「A4」と判別し(S903)、処理を終了する。
【0081】
一方、ステップS902で、分離後センサ10がONであると判定した場合には、原稿サイズを「A3R」と判別し(S904)、処理を終了する。
【0082】
一方、ステップS901で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A4」でないと判定された場合には、原稿の幅データが「B5」であるか否かを判定し(S905)、幅データが「B5」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S906)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「B5」と判別し(S907)、処理を終了する。
【0083】
一方、ステップS906で、分離後センサ10がONであると判定した場合には、原稿サイズを「B4R」と判別し(S908)、処理を終了する。
【0084】
一方、ステップS905で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「B5」でないと判定された場合には、原稿の幅データが「A5」であるか否かを判定し(S909)、幅データが「A5」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S910)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「A5」と判別し(S911)、処理を終了する。
【0085】
一方、ステップS910で、分離後センサ10がONであると判定した場合には、原稿サイズを「A4R」と判別し(S912)、処理を終了する。
【0086】
一方、ステップS909で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A5」でないと判定された場合には、原稿の幅データが「B6」であるか否かを判定し(S913)、幅データが「B6」であると判定した場合には、所定の給紙動作完了時点での分離後センサ10の状態(ONか否か)を判定し(S914)、分離後センサ10がONでない(OFF)と判定した場合には、原稿サイズを「B6」と判別し(S915)、処理を終了する。
【0087】
一方、ステップS914で、分離後センサ10がONであると判定した場合には、原稿サイズを「B5R」と判別し(S916)、処理を終了する。
【0088】
一方、ステップS913で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「B6」でないと判定された場合には、原稿の幅データが「A6」であるか否かを判定し(S917)、幅データが「A6」であると判定した場合には、原稿サイズを「A5R」と判別し(S919)、処理を終了する。
【0089】
一方、ステップS917で、原稿トレイ20上の図示しない規制ガイド板の幅情報に基づき原稿の幅データが「A6」でないと判定された場合には、原稿サイズを「不明」とし(S918)、処理を終了する。
【0090】
以上により、原稿トレイ20上の図示しない規制ガイド板の幅情報と給紙動作完了時点での、分離後センサ10の状態により原稿サイズの判別(原稿サイズチェック)をすることができる。
【0091】
〔読取動作〕
図11は、本発明に係る画像読取装置における原稿読取動作手順の一例を示すフローチャートである。なお、S501〜S513は各ステップを示す。
【0092】
まず、給紙モータM2を駆動して、第2レジストローラ4と第1搬送ローラ5と第2搬送ローラ6が駆動され(S501)、カウンタをセットして(S502)、カウントアップしたら(S503)、すなわち読取位置Rの上流に位置する原稿が所定量搬送された後、原稿先端が読取位置Rに達したと判断すると、リーダ部200による原稿の画像読取が行われる(S504)。
【0093】
画像の読取は、ADF100からリーダ部200に対して、読取開始を通知する事で、リーダ部200が画像データの読み込みを開始する。
【0094】
その後、カウンタをセットして(S505)、カウントアップしたら(S506)、すなわち、所定量搬送した後、原稿検知センサ14が原稿トレイ20上に次に読取を行うべく原稿があるかどうかを判断して(S507)、原稿があると判断した場合は、次原稿の分離開始を許可する(S508)。実際に分離が開始されるタイミングは、原稿サイズ及び原稿搬送速度(読取速度)によって、可変である。
【0095】
一方、ステップS507で、原稿がないと判断された場合は、原稿画像の読取が行われ、リードセンサ12に原稿後端が達した事を検知すると(S509)、その後、カウンタをセットして(S510)、カウントアップしたら(S511)、すなわち、所定量搬送した後、原稿後端が読取位置Rに達したと判断すると原稿読取を終了する(S512)。そして、読取開始と同様に、ADF100からリーダ部200に対して、読取終了を通知する事で、リーダ部200が画像データの読取を終了する。そして、給紙モータM2を停止して(S513)、処理を終了する。
【0096】
〔排紙動作〕
図12は、本発明に係る画像読取装置における原稿排紙動作手順の一例を示すフローチャートである。なお、S601〜S607は各ステップを示す。
【0097】
上述した図7に示す処理に基づいて、原稿画像の読取が終了し、原稿後端が読取位置Rより下流に位置して停止している原稿は、給紙モータM2が駆動され、同時に、排紙モータM3が正転駆動される事で、第2搬送ローラ6と排紙ローラ8が駆動され、搬送パス下流側へと搬送される(S601)。
【0098】
そして、排紙センサ13に原稿後端が達したと検知し(S602)、さらに次原稿が無い場合(S603)、読み取られた原稿が給紙モータM2の駆動系から外れたとして、給紙モータM2を停止させる(S604)。
【0099】
但し、次原稿の給紙動作、又は読取動作が同時に行われている場合(S603)は、給紙モータM2を停止しない。
【0100】
その後、カウンタをセットして(S605)、カウントアップしたら(S606)、すなわち、所定量搬送した後、原稿後端が排紙ローラ8を抜けて、排紙トレイ21上に排出されたと判断されると、排紙モータM3を停止し(S607)、排紙ローラ8の駆動を停止して、処理を終了する。
【0101】
〔反転動作〕
図13は、本発明に係る画像読取装置における原稿反転動作手順の一例を示すフローチャートである。なお、S701〜S716は各ステップを示す。
【0102】
まず、原稿画像の読取が終了し、原稿後端が読取位置Rより下流に位置して停止している原稿は、給紙モータM2が駆動され、同時に、排紙モータM3が正転駆動される事で、第2搬送ローラ6と排紙ローラ8が駆動され、搬送パス下流側へと搬送される(S701)。
【0103】
そして、排紙センサ13に原稿後端が達したと検知すると(S702)、読み取られた原稿が給紙モータM2の駆動系から外れたとして、給紙モータM2を停止させる(S703)。その後、カウンタをセットして(S704)、カウントアップしたら(S705)、すなわち、所定量搬送した後、排紙モータM3を停止する事で(S706)、原稿先端は排紙トレイ21上に排出され、原稿後端が排紙ローラ8にニップされた位置で原稿を停止させる。
【0104】
その後、排紙モータM3を逆転駆動して(S707)、排紙ローラ8の搬送方向が逆転される。排紙センサ13に原稿端部が達した事を検知すると(S708)、カウンタをセットして(S709)、カウントアップしたら(S710)、すなわち、所定量搬送した後、排紙モータM3を停止させる(S711)。この時、第2レジストローラ4は、停止しており、スイッチバックされた原稿の先端が第2レジストローラ4にループ形成した状態で突き当てられ、反転搬送中での斜行が補正される。
【0105】
その後、モータM2を起動すると、第2レジストローラ4と第1搬送ローラ5と第2搬送ローラ6が駆動される(S712)。
【0106】
第2レジストローラ4に突き当てられた原稿は、搬送パスの下流側へと搬送され、リードセンサ12まで原稿先端が搬送された事を検知すると(S713)、カウンタをセットして(S714)、カウントアップしたら(S715)、すなわち、所定量搬送した後、給紙モータM2を停止させ(S716)、原稿先端を読取位置Rより上流に停止させて、処理を終了する。
【0107】
〔空送り動作〕
図11を用いて説明した読取動作における、読取開始ステップ(ステップS504)と読取終了ステップ(ステップS512)を行わず、給紙モータM2は同様の動作を行う。
【0108】
ここで、リーダ部200が、ADF100から搬送されてくる原稿画像を読み取る場合は、スキャナユニット209がADF用プラテン201の下に移動して停止し、原稿が読取位置R上を搬送されている間、画像情報を読み取る。しかしながら、図38に示すように、ADF用プラテン201の読取部Rに、ゴミGが何らかの要因で入り込んだ場合、原稿画像Aの画像を読み込むと、読取画像は、読取画像BのようにゴミGの位置に線が現れてしまう。
【0109】
そこで、図4等に示すように、リーダ部200に、電気機械変換素子210によりプラテン201を屈曲振動させて、ゴミGの除去処理を試行する。
【0110】
〔第2実施形態〕
上記第1実施形態では、ADF用プラテン201に1枚の電気機械変換素子210を融着させてプラテン201を屈曲振動させて、ゴミGの除去処理を試行する場合について説明したが、ADF用プラテン201に電気機械変換素子210を複数枚融着して、励振力の強い屈曲振動を発生させてゴミGの除去効果を高めるように構成してもよい。
【0111】
図14は、本発明の第2実施形態を示す画像読取装置の制御構成を説明するブロック図であり、図3と同一のものには同一の符号を付してある。
【0112】
図14において、ADF100は、CPU800、リードオンリメモリ(以下、ROM)801、ランダムアクセスメモリ(以下、RAM)802、出力ポート、及び入力ポートを備えている。ROM801には、制御用プログラムが格納されており、RAM802には、入力データや作業用データが格納されている。また、出力ポートには、分離モータM1、給紙モータM2、排紙モータM3、離間ソレノイドSL、給紙クラッチCLが接続されている。
【0113】
また、CPU800には、ADF用プラテン301に取り付けられた電気機械変換素子310と電気機械変換素子311を駆動するための駆動ドライバ(電気機械変換素子駆動回路)17が出力ポートを介して接続され、その駆動ドライバ17には電気機械変換素子310と電気機械変換素子311がそれぞれ接続されている。これ以外の構成は、第1実施形態の構成と同じなので説明を省略する。
【0114】
図15〜図17は、本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図であり、図15は、図1に示したADF用プラテン301の振動機構の取り付け状態(ADF用プラテン301に複数枚の電気機械変換素子を接着した状態)に対応する。
【0115】
図15において、Rは画像読取位置であり、310,311は電気機械変換素子を示している。
【0116】
図16は、図15に示したADF用プラテン301と電気機械変換素子310,311との駆動回路例に対応する。
【0117】
図16に示すように、ADF用プラテン301は、電極板312、電極板313、電気機械変換素子310、電気機械変換素子311から構成されている。ADF用プラテン301下面と電極板312上面、電極板312下面と電気機械変換素子310,311上面、電気機械変換素子310,311下面と電極板313上面はそれぞれ固化型の接着剤(不図示)にて融着(結合)されている。
【0118】
電極板312と電極板313は駆動ドライバ17に接続され、CPU800の制御によって電極板312と電極板313の両電極間に、例えば高周波電圧が印加できるようになっている。ADF用プラテン301をGND(接地)とするために電極板312はGNDに接続される。
【0119】
電気機械変換素子310,311は共に平板型の圧電素子であり、図16に示されるように、電気機械変換素子310は矢印314方向に分極されており、電気機械変換素子311は矢印315方向に分極されている。
【0120】
この電気機械変換素子310,311の分極方向が各々異なっているために、この二つの電気機械変換素子310,311に同一の電圧を印加することにより、電気機械変換素子310には矢印方向316に縦振動が励振され、電気機械変換素子311には電気機械変換素子310と逆方向の矢印方向317に縦振動を励振する。
【0121】
そして、駆動ドライバ17によって電極板312、電極板313の両電極間に第1実施形態で説明したように、周波数FB40=32.04(kHz)の高周波電圧を駆動ドライバ17から印加することで、ADF用プラテン301に40次屈曲振動の定在波を励振させることができる。
【0122】
当然のことながら、この2つの電気機械変換素子310,311は、40次屈曲振動の腹位置のほぼ中央(最大振幅位置)に融着されている。つまり、図17に示すように第1実施形態で述べたように、x1、x2、x3、……、x39の位置に電気機械変換素子を分極方向が交互になるように融着すればよい。
【0123】
この構成の場合、電気機械変換素子310,311が互いに屈曲振動の隣り合う腹の位置で逆方向の伸縮を繰り返すので、本発明の第1実施形態の構成からできる屈曲振動よりも強い屈曲振動を得ることができる。
【0124】
同様に、図18に示すように複数の電気機械変換素子をADF用プラテンの読取位置Rの両側に配置することで、より励振力の強い屈曲振動を得ることも可能である。
【0125】
図18は、本発明の第2実施形態を示す画像読取装置の構成を説明する図であり、数の電気機械変換素子をADF用プラテンの読取位置Rの両側に配置した例である。
【0126】
なお、本実施形態において、屈曲振動のモード次数を「40」とする場合について説明したが、これに限ったことではなく、ADF用プラテンの長さ、厚さは自由に選択可能で、その構成に合わせて、屈曲振動のモード次数や高周波電圧の周波数は自由に選択することができる。
【0127】
〔第3実施形態〕
上記第1,第2の実施形態においては、ADF用プラテンの主走査方向の屈曲振動を励振させることについて説明したが、ADF用プラテンの副走査方向への屈曲振動を励振させることでも同様の効果を得ることができる。
【0128】
図19は、本発明の第3実施形態を示す画像読取装置の構成を説明する図であり、ADF用プラテンの副走査方向への屈曲振動を励振させる例であり、図18と同一のものには同一の符号を付してある。
【0129】
つまり、本実施形態で述べた屈曲振動の演算式(上記第(1)式)中において、長さ方向のLの項を、ADF用プラテンの幅方向(副走査方向)の長さWを代入することにより、下記第(2)式が得られる。
【0130】
FBn=(αn2/(2πW2)){√(E/ρ)}(T/2√3)……(2)
ただし、「αn=π/2+n・π」により決定される。
【0131】
また、第(2)式中、nは屈曲振動モードの次数を示し、Lは弾性体の長さを示し、Tは弾性体の厚みを示し、Eは弾性体のヤング率を示し、ρは弾性体の密度を示す。
【0132】
本実施形態の具体例として、ADF用プラテン301の幅を「40(mm)」、厚みを「4(mm)」、プラテン301の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」、4次の屈曲振動(n=4)を励振させると仮定した場合の上記第(2)式の演算結果を下記に示す。
【0133】
「FB40=32.04(kHz)」、「波長=20.0(mm)」となり、この結果より、ADF用プラテン301に励振される40次屈曲振動定在波の腹位置の中心はADF用プラテン301の端部から、「xm=5.00+m・λ/2(mm)」の位置に励振される。なお、mは0〜3までの整数とする。
【0134】
腹の数は「4」であるから、具体的には、「m=0」の時、「x1=5.00(mm)」、「m=1」の時「x2=15.00(mm)」、「m=2」の時「x3=25.00(mm)」、……、「m=3」の時「x4=35.00(mm)」となる。
【0135】
そこで、この腹位置の中心の位置に電気機械変換素子310,311の中心が位置するように、電気機械変換素子310,311をプラテン301の下面側に上述したように接着剤により融着し、この電気機械変換素子310,311に周波数FB40=32.04(kHz)の高周波電圧を駆動ドライバ17から印加することでADF用プラテン301に4次屈曲振動の定在波を励振させることができる。
【0136】
このように、この演算式(上記第(2)式)にADF用プラテンの諸条件を代入し演算した結果に基づいてADF用プラテンを構成することにより、ADF用プラテンの副走査方向への屈曲振動の励振を利用することが可能となる。
【0137】
また、複数の電気機械変換素子をADF用プラテンの読取位置Rの両側に配置することで、より励振力の強い屈曲振動を得ることも可能である。
【0138】
以上述べたように、本実施形態に関して、屈曲振動の腹位置の中心位置と電気機械変換素子の中心位置を合わせたが、屈曲振動の腹の中心位置(最大振幅位置)が融着された電気機械変換素子に含まれていれば、ADF用プラテンには屈曲振動を励振することが可能である。
【0139】
また、本実施形態では、ADF用プラテンに屈曲振動を励振させる事例を説明したが、ブック用プラテンについても同様に構成できることは言うまでも無い。
【0140】
さらに、第1実施形態と第3実施形態と、もしくは、第2実施形態と第3実施形態とを組み合わせて、プラテンガラスの主走査方向の屈曲振動と副走査方向の屈曲振動の両条件を満足する構成でプラテンガラスを振動させる構成を採用することも本発明の適用範囲である。
【0141】
図20は、本発明に係る画像読取装置における第1のゴミ除去状態を説明する図であり、図38と同一のものには同一の符号を付してある。
【0142】
上記第1〜第3実施形態によれば、ゴミGは、プラテンの振動により読取位置Rから読取位置外G1へ移動することが期待され、正常な読取画像Bが得られる。
【0143】
以上説明したように、電気機械変換素子を図1,図4〜図6、図15〜図19に示すように、プラテンに屈曲振動を励起させることにより、図20に示したようなゴミGがプラテンに入り込んだ場合でも、プラテンの振動がゴミGに伝わり、ゴミGはその場に滞留することが出来なくなる。その結果、ゴミGが読取位置Rの幅を超えて移動して、読取画像に線として現れないようになる。
【0144】
また、電気機械変換素子を超音波領域で駆動することで、耳障りな音の発生を防ぐことができる。
【0145】
〔第4実施形態〕
上記第1〜第3実施形態においては、プラテンガラスの主走査方向あるいは副走査方向に屈曲振動を起こしてゴミ除去処理を行う場合について説明したが、プラテンガラスを縦方向に振動させてゴミ除去処理を行えるように構成してもよい。以下、その実施形態について説明する。
【0146】
図21〜図24は、本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図であり、図21は、図1に示したADF用プラテン201−1とADF用プラテン201−2との間に電気機械変換素子210が電極板211と電極板212に挟持され状態で配置される。なお、図21の左側に要部断面を示す。
【0147】
図21に示すように、電気機械変換素子210は、画像読取位置R域外に取り付けられており、読取画像に影響を与えることはない位置に設けられる。
【0148】
図22は、図21に示したADF用プラテン201−1,201−2と電気機械変換素子210との駆動回路例に対応する。
【0149】
なお、プラテン201−1下面と電極板211の上面、電極板211の下面と電気機械変換素子210の上面、電気機械変換素子210の下面と電極板212の上面、電極板212の下面とプラテン201−2の上面はそれぞれ固化型の接着剤(図示しない)にて融着(結合)されている。
【0150】
電極板211と電極板212は駆動ドライバ16に接続され、CPU800の制御によって電極板211と電極板212の両電極間に、例えば高周波電圧が印加できるように構成されている。
【0151】
なお、読取位置Rが存在するプラテン201側をGND(接地)とするために電極板211はGNDに接続される。ここで、読取位置Rはプラテン201−2側に存在してもよく、この場合は、電極板212をGND(接地)に接続すればよい。
【0152】
次に、ADF用プラテン201に縦振動を励振させる構成について説明する。
【0153】
電気機械変換素子210は平板型の圧電素子であり、例えばPZT等の圧電素子が用いられる。この電気機械変換素子210は、図22に示すように、矢印213方向に分極されており、駆動ドライバ16によって電気機械変換素子210の両側に電圧を印加することにより、矢印214方向に縦振動を励振する。この縦振動を利用して、ADF用プラテン201に縦振動を励振させるためには、ADF用プラテン201の機械的共震周波数と電気機械変換素子210の電気的共振周波数を一致させる必要がある。
【0154】
まず、弾性体に縦振動を励振するための縦振動の機械的共振周波数FLは、一般的に下記第(3)式で与えられる。
【0155】
FL=(1/2L){√(E/ρ)}……(3)
また、第(3)式中、Lは弾性体の長さを示し、Eは弾性体のヤング率を示し、ρは弾性体の密度を示す。
【0156】
本実施形態の具体例として、ADF用プラテン201の幅方向長さ(副走査方向長さL)を40(mm)、プラテン201の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」を縦振動を励振させると仮定した場合の上記第(3)式の演算結果は、「FL1=21.324(kHz)」となり、この結果より、図22に示すADF用プラテン201に励振される。
【0157】
従って、図22に示すプラテン201の幅方向の長さLを40(mm)となるように構成し、電気機械変換素子210の中心がADF用プラテン201の中心位置(縦振動の節(最小振幅位置)部分)になるように電気機械変換素子210を融着し、この電気機械変換素子210に周波数FL1=21.324(kHz)の高周波電圧を駆動ドライバ16から印加することで、ADF用プラテン201に1次の縦振動を図23に示すように励振させることができる。
【0158】
なお、本実施形態では、プラテン201−1下面と電極板211の上面、電極板211の下面と電気機械変換素子210の上面、電気機械変換素子210の下面と電極板212の上面、電極板212の下面とプラテン201−2の上面はそれぞれ固化型の接着剤(図示しない)にて融着し、さらに、電極板211と電極板212は駆動ドライバ16に接続され、CPU800の制御によって電極板211と電極板の両電極間に、例えば高周波電圧を印加して縦振動を励振する場合について説明したが、図24に示すように、プラテン201−1またはプラテン201−2のどちらか一方のみで構成してもよい。このように縦振動する透過部材が非対象となる場合として本発明の効果が期待できる。
【0159】
〔第5実施形態〕
上記第4実施形態では、プラテン201−1下面と電極板211の上面、電極板211の下面211と電気機械変換素子210の上面、電気機械変換素子210の下面と電極板212の上面、電極板212の下面とプラテン201−2の上面はそれぞれ固化型の接着剤(図示しない)にて融着する場合について説明したが、ADF用プラテン201に電気機械変換素子210を複数枚融着して、励振力の強い屈曲振動を発生させてゴミGの除去効果を高めるように構成してもよい。
【0160】
図25〜図28は、本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図であり、図25は、ADF用プラテン301−1とADF用プラテン301−2との間に電極板を介して複数の電気機械変換素子310,311が挟持され状態で配置される。なお、図25の左側に要部断面を示す。
【0161】
図26は、図25に示したADF用プラテン301−1,301−2と電気機械変換素子310,311との駆動回路例に対応する。
【0162】
図26に示すように、本実施形態では、ADF用プラテン301は、プラテン301−1とプラテン301−2から構成されており、電気機械変換素子310と電気変換素子311は、電極板312、電極板313、電極板314を介してプラテン301−1とプラテン301−2の間に挟持されている。
【0163】
ADF用プラテン301は、プラテン301−1下面と電極板312上面、電極板312下面と電気機械変換素子310上面、電気機械変換素子310下面と電極板313上面、電極板313下面と電気機械変換素子311上面、電気機械変換素子311下面と電極板314上面、電極板314下面とプラテン301−2上面はそれぞれ固化型の接着剤(図示しない)にて融着(結合)されている。
【0164】
電極板312と電極板313と電極板314は駆動ドライバ17に接続され、CPU800の制御によって電極板312と電極板313の両電極間と電極板313と電極板314の両電極間に、例えば高周波電圧が印加できるようになっている。なお、ADF用プラテン301−1とADF用プラテン301−2をGND(接地)とするために、電極板312と電極板314はGNDに接続される。
【0165】
本実施形態において、電気機械変換素子310,311は共に、図26に示すように、電気機械変換素子310は矢印315方向に分極されており、電気機械変換素子311は矢印316方向に分極されている。このように、電気機械変換素子310,311の分極方向が各々異なっているために、この2つの電気機械変換素子310,311に同一の電圧を印加することにより、電気機械変換素子310には、矢印317方向に縦振動が励振され、電気機械変換素子311には電気機械変換素子310と逆方向の矢印318方向に縦振動を励振する。
【0166】
そして、電極板312,314と電極板313の両電極間に第4実施形態で説明したように、「FL1=21.324(kHz)」の高周波電圧を駆動ドライバ17から印加することで、図27に示すようにADF用プラテン301に縦振動を励振させることができる。
【0167】
なお、本実施形態において、2つの電気機械変換素子310,311は、縦振動の節位置のほぼ中央(縦振動の最小振幅位置を含む位置)に融着されている。また、複数の電気機械変換素子を分極方向が交互になるように、交互に融着すれば、電極板の枚数も削減され、かつ、より大きな縦振動を得ることができることはいうまでもない。
【0168】
また、本実施形態では、ADF用プラテン301がADF用プラテン301−1とADF用プラテン301−2から構成される場合について説明したが、図28に示すように、ADF用プラテン301がプラテン301−1とプラテン301−2のどちらか一方のみの構成としてもよいし、縦振動する透過部材が非対象系でも本発明を適用可能であることはいうまでもない。
【0169】
〔第6実施形態〕
上記第4,第5実施形態では、ADF用プラテンを副走査方向の縦振動を励振させる場合について説明したが、ADF用プラテンを主走査方向への縦振動を励振するように構成してもよい。以下、その実施形態について説明する。
【0170】
図29,図30は、本発明の第6実施形態を示す画像読取装置の構成を説明する図であり、プラテンの励振機構の要部構成に対応する。
【0171】
本実施形態では、第4実施形態に示した、第(3)式中、
FL=(1/2L){√(E/ρ)})
において、長さ方向のLの項を、ADF用プラテンの幅方向(主走査方向)の長さWを代入することにより、すなわち、下記第(4)式が与えられる。
【0172】
FL=(1/2W){√(E/ρ)}……(4)
具体例として、ADF用プラテン201の幅方向長さ(主走査方向長さW)を「800(mm)」、プラテン201の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」を縦振動を励振させると仮定した場合の上記第(4)式の演算結果は、「FL1=1.066(kHz)」となり、このADF用プラテン長さの中心の位置に電気機械変換素子の中心が位置するように電気機械変換素子を融着し、この電気機械変換素子に上記第(4)式から得られる、周波数FL1=1.066(kHz)の高周波電圧を駆動ドライバ17より印加することで、図29,図30に示すADF用プラテンが励振される。
【0173】
このように、第(4)式に基づいて、ADF用プラテンの諸条件を代入し演算した結果に基づいて、ADF用プラテンおよびその駆動系を構成することにより、ADF用プラテンの主走査方向への縦振動の励振を利用することが可能となる。
【0174】
特に、図29の(A)は、第4実施形態におけるプラテン構成に対して主走査方向に振動を与える場合に対応し、図29の(B)は、第5実施形態におけるプラテン構成に対して主走査方向に振動を与える場合に対応に対応する。
【0175】
また、図30に示す例は、図29の(A)または(B)に示す2枚から構成されるADF用プラテンを1枚構成とした応用例に対応する。
【0176】
〔第7実施形態〕
上記第1〜第6実施形態では、プラテンに振動を与える電気機械変換素子として、縦効果型の圧電素子を利用する場合について説明したが、横効果型の圧電素子を電気機械変換素子で構成してもよい。以下、その実施形態について説明する。
【0177】
図31,図32は、本発明の第7実施形態を示す画像読取装置における構成を説明する図であり、図31は、画像読取装置のプラテンと電気機械変換素子との結合配置構成例に対応し、図32は、画像読取装置のプラテンと電気機械変換素子との駆動回路例に対応する。
【0178】
なお、本実施形態では、横効果型の圧電素子を電気機械変換素子としているが、縦効果型の圧電素子との違いは、縦効果型の圧電素子分極方向と振動方向とが一致するのに対して、横効果型の圧電素子は分極方法と振動方向とが直交する点にある。
【0179】
図31において、ADF用プラテン401には横効果型の圧電素子で構成され電気機械変換素子410を結合して、後述するように接着剤により融着(結合)されている。
【0180】
図32において、ADF用プラテン401は、電極板411、電極板412、横効果型の圧電素子から構成される電気機械変換素子410を備えている。
【0181】
そして、ADF用プラテン401右面と電極板411左面、電極板411右面と電気機械変換素子410左面、電気機械変換素子410右面と電極板412左面はそれぞれ固化型の接着剤(図示しない)にて融着されている。
【0182】
電極板411と電極板412は駆動ドライバ18に接続され、CPU800の制御の下で電極板411と電極板412の両電極間に、例えば高周波電圧が印加できるように構成されている。
【0183】
特に、電気機械変換素子410は、平板型の横効果型の圧電素子であり、図32に示すように、電気機械変換素子410は、矢印413方向(横方向)に分極されている。
【0184】
この電気機械変換素子410に電圧を印加することにより、電気機械変換素子410には、矢印414方向に縦振動が励振される。そして、駆動ドライバ18によって、電極板411、電極板412の両電極間に第4実施形態で説明したように、周波数FL1=21.324(kHz)の高周波電圧を駆動ドライバ18から印加することで、ADF用プラテン401の副走査方向に1次の縦振動を励振させることができる。
【0185】
なお、本実施形態では、当然のことながら、電気機械変換素子410は、ADF用プラテン401のほぼ中央に融着されており、第4実施形態で上述したように、この位置は、縦振動の節位置(最小振幅位置)となる。
【0186】
また、上記縦振動の励振を強める場合には、プラテンと電気機械変換素子410との構成を図33,図34に示す構成とすればよい。
【0187】
〔第8実施形態〕
図33,図34は、本発明の第8実施形態を示す画像読取装置における構成を説明する図であり、図33は、画像読取装置のプラテンと電気機械変換素子との結合配置構成例に対応し、図34は、画像読取装置のプラテンと電気機械変換素子との駆動回路例に対応する。
【0188】
図33において、ADF用プラテン401には横効果型の圧電素子で構成される電気機械変換素子410−1と電気機械変換素子410−2を結合して、後述するように接着剤により融着されている。
【0189】
図34において、ADF用プラテン401は、電極板411−1,411−2、電極板412−1,412−2、横効果型の圧電素子から構成される電気機械変換素子410−1と電気機械変換素子410−2を備えている。
【0190】
そして、ADF用プラテン401右面と電極板411−1左面、電極板411−1右面と電気機械変換素子410−1左面、電気機械変換素子410−1右面と電極板412−1左面はそれぞれ固化型の接着剤(図示しない)にて融着されている。
【0191】
電極板411−1と電極板412−1は駆動ドライバ18に接続され、CPU800の制御の下で電極板411−1と電極板412−1の両電極間に、例えば高周波電圧が印加できるように構成されている。なお、410−2についても同様である。
【0192】
特に、電気機械変換素子410−1,410−2は、平板型の横効果型の圧電素子であり、図34に示すように、電気機械変換素子410−1,410−2は、矢印413−1,矢印413−2方向(横方向)に分極されている。
【0193】
この電気機械変換素子410−1,410−2に電圧を印加することにより、電気機械変換素子410−1,410−2には、矢印414方向に縦振動が強く励振される。そして、駆動ドライバ18によって、電極板411−1,411−2、電極板412−1,412−2の両電極間に第4実施形態で説明したように、周波数FL1=21.324(kHz)の高周波電圧を駆動ドライバ18から印加することで、ADF用プラテン401の副走査方向に1次の縦振動を励振させることができる。
【0194】
この場合、ADF用プラテン401の形状は、幅方向長さ(副走査方向長さL)を「40(mm)」、プラテン401の素材となるガラスのヤング率を「7.13×1010(N/m2)」、密度を「2.5×103(kg/m3)」を縦振動を励振させると仮定した場合の上記第(3)式の演算結果は、「FL1=21.324(kHz)」となり、この結果より、図33に示すADF用プラテン401に励振される。
【0195】
なお、本実施形態では、当然のことながら、電気機械変換素子410は、ADF用プラテン401のほぼ中央に融着されており、第7実施形態で上述したように、この位置は、縦振動の節位置(最小振幅位置)となる。
【0196】
図35は、本発明に係る画像読取装置における第2のゴミ除去状態を説明する図であり、図38と同一のものには同一の符号を付してある。
【0197】
図に示すように、ゴミGは、プラテンの振動により読取位置Rから読取位置外G1へ移動することが期待され、正常な読取画像Bが得られる。
【0198】
本実施形態によれば、縦振動の節位置の中心位置と電気機械変換素子の中心位置が、縦振動の節位置(最小振動位置)が融着された電気機械変換素子に含まれていれば、ADF用プラテンに縦振動を励振させて、プラテン上の読取位置に付着したゴミを該振動により読取位置外へ移動させて、読取画像不良(原稿画像にない幻縦線画像現象)となる事態を自動的に回避することが可能となる。
【0199】
なお、上記第4〜第8実施形態において、縦振動を励振にさせる構成としては、上記第4〜第8実施形態に限定されることはなく、ADF用プラテンの長さ、種類、電気機械変換素子の種類は他の材料や他のデバイスを自由に選択可能であり、その変形構成に合わせて縦振動の高周波電圧の周波数を決定することはいうまでもない。
【0200】
また、本実施形態では、ADF用プラテンに屈曲振動を励振させる事例を説明したが、ブック用プラテンについても同様に構成できることは言うまでも無い。
【0201】
さらに、第4実施形態と第7実施形態と、もしくは、第5実施形態と第6施形態とを組み合わせて、プラテンガラスの主走査方向の縦振動と副走査方向の縦振動の両条件を満足する構成でプラテンガラスを振動させる構成を採用することも本発明の適用範囲である。
【0202】
以上説明したように、電気機械変換素子を図1,図21〜図34に示すように、プラテンに縦振動を励起させることにより、図35に示したようなゴミGがプラテンに入り込んだ場合でも、プラテンの振動がゴミGに伝わり、ゴミGはその場に滞留することが出来なくなる。その結果、ゴミGが読取位置Rの幅を超えて移動して、読取画像に線として現れないようになる。
【0203】
また、電気機械変換素子を超音波領域で駆動することで、耳障りな音の発生を防ぐことができる。
【0204】
さらに、本発明は、自動原稿搬送装置を備えた画像読取装置のみでなく、該画像読取装置を具備した複写機等の画像形成装置等にも適用可能である。
【0205】
また、電気機械変換素子を駆動してADFプラテンを振動させるタイミングは、原稿読取時に限られるものではなく、ADF開閉時や、電源投入時、その他のタイミングであってもよい。
【0206】
また、上記第1実施形態〜第8実施形態のいずれかを組み合わせた構成も本発明に含まれるものである。
【0207】
以下、図36に示すメモリマップを参照して本発明に係る画像読取装置で読み出し可能なデータ処理プログラムの構成について説明する。
【0208】
図36は、本発明に係る画像読取装置で読み出し可能な各種データ処理プログラムを格納する記憶媒体のメモリマップを説明する模式図である。
【0209】
なお、特に図示しないが、記憶媒体に記憶されるプログラム群を管理する情報、例えばバージョン情報,作成者等も記憶され、かつ、プログラム読み出し側のOS等に依存する情報、例えばプログラムを識別表示するアイコン等も記憶される場合もある。
【0210】
さらに、各種プログラムに従属するデータも上記ディレクトリに管理されている。また、インストールするプログラムやデータが圧縮されている場合に、解凍するプログラム等も記憶される場合もある。
【0211】
本実施形態における図7〜図13に示す機能が外部からインストールされるプログラムによって、ホストコンピュータにより遂行されていてもよい。そして、その場合、CD−ROMやフラッシュメモリやFD等の記憶媒体により、あるいはネットワークを介して外部の記憶媒体から、プログラムを含む情報群を出力装置に供給される場合でも本発明は適用されるものである。
【0212】
以上のように、前述した実施形態の機能を実現するソフトウエアのプログラムコードを記録した記憶媒体を、システムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(またはCPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、本発明の目的が達成されることは言うまでもない。
【0213】
この場合、記憶媒体から読み出されたプログラムコード自体が本発明の新規な機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0214】
プログラムコードを供給するための記憶媒体としては、例えば、フロッピー(登録商標)ディスク,ハードディスク,光ディスク,光磁気ディスク,CD−ROM,CD−R,DVD−ROM,磁気テープ,不揮発性のメモリカード,ROM,EEPROM,シリコンディスク等を用いることができる。
【0215】
また、コンピュータが読み出したプログラムコードを実行することにより、前述した実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0216】
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPU等が実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0217】
また、本発明は、複数の機器から構成されるシステムに適用しても、1つの機器からなる装置に適用してもよい。また、本発明は、システムあるいは装置にプログラムを供給することによって達成される場合にも適応できることは言うまでもない。この場合、本発明を達成するためのソフトウエアによって表されるプログラムを格納した記憶媒体を該システムあるいは装置に読み出すことによって、そのシステムあるいは装置が、本発明の効果を享受することが可能となる。
【0218】
さらに、本発明を達成するためのソフトウエアによって表されるプログラムをネットワーク上のデータベースから通信プログラムによりダウンロードして読み出すことによって、そのシステムあるいは装置が、本発明の効果を享受することが可能となる。
【0219】
【発明の効果】
以上説明したように、本発明に係る第1〜13の発明によれば、原稿送り装置の原稿搬送路と読取手段の間にあり原稿の画像を透過するように配置された透過部材に結合された一つもしくは複数の電気機械変換素子によって前記透過部材に屈曲振動又は縦振動を励振させるので、自動原稿搬送装置で原稿を搬送中に読み取る方式(流し読み方式)において、原稿台ガラスに外部からゴミが進入した場合でも、原稿台ガラスの振動がゴミに伝わり、ゴミはその場に滞留することが出来なくなり、その結果、ゴミが流し読みによる読取部の幅を超えて移動して、ゴミを画像として誤って読み取ってしまい、読取画像に線として現れることを防止することができる等の効果を奏する。
【図面の簡単な説明】
【図1】本発明の第1実施形態を示す画像読取装置の構成を説明する概略断面図である。
【図2】本発明の第1実施形態を示す画像読取装置の構成を説明する概略断面図である。
【図3】図1,図2に示したADFの制御構成を説明するブロック図である。
【図4】本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図である。
【図5】本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図である。
【図6】本発明に係る画像読取装置における第1のゴミ処理機構およびその動作を説明する図である。
【図7】本発明に係る画像読取装置における第1の制御手順を示すフローチャートである。
【図8】本発明に係る画像読取装置における原稿分離動作手順の一例を示すフローチャートである。
【図9】本発明に係る画像読取装置における原稿給紙動作手順の一例を示すフローチャートである。
【図10】本発明に係る画像読取装置における原稿サイズチェック動作手順の一例を示すフローチャートである。
【図11】本発明に係る画像読取装置における原稿読取動作手順の一例を示すフローチャートである。
【図12】本発明に係る画像読取装置における原稿排紙動作手順の一例を示すフローチャートである。
【図13】本発明に係る画像読取装置における原稿反転動作手順の一例を示すフローチャートである。
【図14】本発明の第2実施形態を示す画像読取装置の制御構成を説明するブロック図である。
【図15】本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図である。
【図16】本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図である。
【図17】本発明に係る画像読取装置における第2のゴミ処理機構およびその動作を説明する図である。
【図18】本発明の第2実施形態を示す画像読取装置の構成を説明する図である。
【図19】本発明の第3実施形態を示す画像読取装置の構成を説明する図である。
【図20】図20は、本発明に係る画像読取装置における第1のゴミ除去状態を説明する図である。
【図21】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図22】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図23】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図24】本発明の第4実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図25】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図26】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図27】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図28】本発明の第5実施形態を示す画像読取装置における第4のゴミ処理機構およびその動作を説明する図である。
【図29】本発明の第6実施形態を示す画像読取装置の構成を説明する図である。
【図30】本発明の第6実施形態を示す画像読取装置の構成を説明する図である。
【図31】本発明の第7実施形態を示す画像読取装置の構成を説明する図である。
【図32】本発明の第7実施形態を示す画像読取装置の構成を説明する図である。
【図33】本発明の第8実施形態を示す画像読取装置の構成を説明する図である。
【図34】本発明の第8実施形態を示す画像読取装置の構成を説明する図である。
【図35】本発明に係る画像読取装置における第2のゴミ除去状態を説明する図である。
【図36】本発明に係る画像読取装置で読み出し可能な各種データ処理プログラムを格納する記憶媒体のメモリマップを説明する模式図である。
【図37】従来の画像読取装置の読取機構の斜視図である。
【図38】図37に示した画像読取装置における原稿画像と読取画像とゴミ画像との関係を説明する図である。
【符号の説明】
16 電気機械変換素子駆動回路
100 自動原稿送り装置
200 リーダ部
201 ADF用プラテン
203 ランプ
204,205,206 ミラー
207 レンズ
208 CCDセンサ
209 スキャナユニット
210,310,311 電気機械変換素子
800 CPU
801 ROM
802 RAM
Claims (13)
- 複数の原稿を順次搬送する自動原稿送り装置と、前記自動原稿送り装置から搬送された原稿の画像を搬送中に読み取る読取手段と、前記自動原稿送り装置の原稿搬送路と前記読取手段の間にあり原稿の画像を透過するように配置された透過部材とを備えた画像読取装置において、
前記透過部材に結合された一つもしくは複数の電気機械変換素子と、
前記電気機械変換素子に高周波電圧を印加する電圧供給手段と、
前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に振動を励振させる制御手段と、
を有することを特徴とする画像読取装置。 - 前記制御手段は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に屈曲振動を励振させることを特徴とする請求項1記載の画像読取装置。
- 前記一つもしくは複数の電気機械変換素子は、前記制御手段により励振された前記透過部材の屈曲振動の最大振幅位置を含む位置にそれぞれ結合されることを特徴とする請求項2記載の画像読取装置。
- 前記制御手段は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に縦振動を励振させることを特徴とする請求項1記載の画像読取装置。
- 前記一つもしくは複数の電気機械変換素子は、前記制御手段により励振された前記透過部材の縦振動の最小振幅位置を含む位置にそれぞれ結合されることを特徴とする請求項4記載の画像読取装置。
- 前記透過部材は、第1の透過部材と第2の透過部材から構成され、前記一つもしくは複数の電気機械変換素子は、該第1の透過部材と第2の透過部材の間に結合されることを特徴とする請求項5記載の画像読取装置。
- 前記一つもしくは複数の電気機械変換素子は、前記透過部材の画像読取平面と平行する面に結合されることを特徴とする請求項5記載の画像読取装置。
- 前記制御手段は、前記透過部材の主走査方向の機械的共振周波数とほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする請求項1〜7のいずれかに記載の画像読取装置。
- 前記制御手段は、前記透過部材の副走査方向の機械的共振周波数とほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする請求項1〜7のいずれかに記載の画像読取装置。
- 前記制御手段は、前記透過部材の主走査方向の機械的共振周波数と副走査方向の機械的共振周波数と各々ほぼ一致する高周波電圧で前記一つもしくは複数の電気機械変換素子を制御することを特徴とする請求項1〜7のいずれかに記載の画像読取装置。
- 複数の原稿を順次搬送する自動原稿送り装置と、前記自動原稿送り装置から搬送された原稿の画像を搬送中に読み取る読取手段と、前記自動原稿送り装置の原稿搬送路と前記読取手段の間にあり原稿の画像を透過するように配置された透過部材と、前記透過部材に結合された一つもしくは複数の電気機械変換素子と、前記電気機械変換素子に高周波電圧を印加する電圧供給手段とを備えた画像読取装置の制御方法において、
前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に振動を励振させる振動工程を有することを特徴とする画像読取装置の制御方法。 - 前記振動工程は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に屈曲振動を励振させることを特徴とする請求項11記載の画像読取装置の制御方法。
- 前記振動工程は、前記一つもしくは複数の電気機械変換素子と前記電圧供給手段によって前記透過部材に縦振動を励振させることを特徴とする請求項11記載の画像読取装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002161303A JP2004012474A (ja) | 2002-06-03 | 2002-06-03 | 画像読取装置および画像読取装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002161303A JP2004012474A (ja) | 2002-06-03 | 2002-06-03 | 画像読取装置および画像読取装置の制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004012474A true JP2004012474A (ja) | 2004-01-15 |
Family
ID=30430416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002161303A Pending JP2004012474A (ja) | 2002-06-03 | 2002-06-03 | 画像読取装置および画像読取装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004012474A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007264096A (ja) * | 2006-03-27 | 2007-10-11 | Canon Inc | 塵埃除去装置 |
| JP2007267189A (ja) * | 2006-03-29 | 2007-10-11 | Canon Inc | 塵埃除去装置、画像読取装置、及び撮像装置 |
| JP2008301271A (ja) * | 2007-05-31 | 2008-12-11 | Canon Inc | 光学装置 |
| US8256905B2 (en) | 2007-02-02 | 2012-09-04 | Canon Kabushiki Kaisha | Foreign substance removing device and foreign substance removing method |
| CN103372537A (zh) * | 2012-04-26 | 2013-10-30 | 佳能株式会社 | 尘埃移除装置和图像拾取设备 |
-
2002
- 2002-06-03 JP JP2002161303A patent/JP2004012474A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007264096A (ja) * | 2006-03-27 | 2007-10-11 | Canon Inc | 塵埃除去装置 |
| US8075143B2 (en) | 2006-03-27 | 2011-12-13 | Canon Kabushiki Kaisha | Foreign substance removing apparatus |
| JP2007267189A (ja) * | 2006-03-29 | 2007-10-11 | Canon Inc | 塵埃除去装置、画像読取装置、及び撮像装置 |
| US8256905B2 (en) | 2007-02-02 | 2012-09-04 | Canon Kabushiki Kaisha | Foreign substance removing device and foreign substance removing method |
| EP3145072A1 (en) | 2007-02-02 | 2017-03-22 | Canon Kabushiki Kaisha | Foreign substance removing device and foreign substance removing method |
| JP2008301271A (ja) * | 2007-05-31 | 2008-12-11 | Canon Inc | 光学装置 |
| CN103372537A (zh) * | 2012-04-26 | 2013-10-30 | 佳能株式会社 | 尘埃移除装置和图像拾取设备 |
| US8866952B2 (en) | 2012-04-26 | 2014-10-21 | Canon Kabushiki Kaisha | Dust removing device and image pickup apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7150414B2 (ja) | 印刷制御装置、印刷制御装置の制御方法、プログラム、及び記憶媒体 | |
| JP2006056671A (ja) | 後処理装置 | |
| JP2007163559A (ja) | 画像形成装置、及び画像形成装置の制御方法 | |
| JP2004012474A (ja) | 画像読取装置および画像読取装置の制御方法 | |
| JP4911680B2 (ja) | 画像形成装置及び画像形成システム | |
| CN103916554A (zh) | 触控面板装置 | |
| JP4123204B2 (ja) | 用紙後処理装置、及びその制御方法 | |
| JPS6044439A (ja) | シ−ト搬送装置 | |
| US8786917B2 (en) | Image reading method and image reading apparatus | |
| JP3684223B2 (ja) | 画像読取装置および画像読取装置の制御方法およびプログラムおよび記憶媒体 | |
| JP4323777B2 (ja) | 画像形成装置 | |
| JPH1127435A (ja) | 画像形成装置 | |
| JP2003280110A (ja) | 画像読取装置および画像読取装置の制御方法およびプログラムおよび記憶媒体 | |
| JP4345247B2 (ja) | 記録装置 | |
| JP2003307793A (ja) | 画像読取り装置および画像読取り制御方法およびコンピュータが読取り可能な記憶媒体およびプログラム | |
| JP3743203B2 (ja) | 画像形成装置および搬送制御方法 | |
| JP2005079613A (ja) | 画像形成装置 | |
| JP5094200B2 (ja) | シート処理装置及び画像形成装置 | |
| JP2006184592A (ja) | 加熱定着装置及び画像形成装置 | |
| JP4259451B2 (ja) | 画像形成システム及び後処理装置 | |
| JP2002335370A (ja) | 画像記録装置 | |
| JPH10330008A (ja) | 画像形成装置 | |
| JP2007076850A (ja) | シート挿入装置を備えた画像形成システム | |
| JP2004123291A (ja) | 原稿搬送装置、画像読取装置及び画像形成装置 | |
| JP2002014494A (ja) | 画像形成装置及び画像形成方法並びに記憶媒体 |