JP2004015854A - 可変速発電電動機システム - Google Patents
可変速発電電動機システム Download PDFInfo
- Publication number
- JP2004015854A JP2004015854A JP2002162230A JP2002162230A JP2004015854A JP 2004015854 A JP2004015854 A JP 2004015854A JP 2002162230 A JP2002162230 A JP 2002162230A JP 2002162230 A JP2002162230 A JP 2002162230A JP 2004015854 A JP2004015854 A JP 2004015854A
- Authority
- JP
- Japan
- Prior art keywords
- power
- command value
- power command
- frequency
- generator motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Control Of Eletrric Generators (AREA)
Abstract
【解決手段】発電電動機1の二次側周波数f2を検出し、二次側周波数f2が零付近となる所定の範囲を外れるように、一次側の有効電力の指令値を補正演算し、該有効電力を補正された指令値で制御するように電力変換回路4を運転する。
【選択図】 図1
Description
【発明の属する技術分野】
この発明は、一次側が電力系統に接続され二次側が電力変換器に接続された可変速発電電動機を制御する可変速発電電動機システムに関するものである。
【0002】
【従来の技術】
交流励磁発電電動機は、一次側(固定子側)が変圧器を介して交流電力系統に接続され、二次側(回転子側)には電力変換器が接続され、この電力変換器から発電電動機に可変周波数の電力を供給することにより、発電電動機は回転子を交流電力系統とは違う周波数で運転することができる。このため、高速に電力を供給、吸収することができ、交流電力系統の周波数調整、安定化に貢献できる。
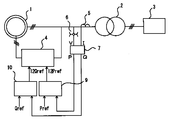
図7は、例えば、「巻線形誘導機の有効・無効電力制御方式」、平成元年電気学会産業応用部門全国大会予稿集、pp.443−446、1989に開示されている従来の可変速発電電動機システムの例を示す構成図である。
図において、1は発電電動機、2は変圧器、3は交流電力系統、4は電流制御型電力変換回路、5は電流検出器、6は電圧検出器、7は電力検出器、9は有効電力制御器、10は無効電力制御器である。
【0003】
図に示すように、交流電力系統3の有効電力と無効電力とは、電流検出器5と電圧検出器6によって検出される交流電力系統3の電流電圧から電力検出器7により演算される。三相の交流電力系統3について、その電流をIsa、Isb、Isc、電圧をVsa、Vsb、Vscとすれば、有効電力P、無効電力Qは例えば次のように演算される。
P=Vsa・Isa+Vsb・Isb+Vsc・Isc
Q={(Vsb−Vsc)Isa+(Vsc−Vsa)Isb+(Vsa−Vsb)Isc}/√3
有効電力制御器9、無効電力制御器10では、検出された電力P、Qと電力指令値Pref、Qrefとに応じて二次電流指令値I2Pref、I2Qrefを出力し、電力P、Qが指令値Pref、Qrefに一致するように動作する。
発電電動機1に二次電流が流れると一次側に誘起電圧が発生して、その結果一次電流が流れる。このとき二次電流の大きさと位相を調節すると一次側に誘起される電圧の大きさと位相が変化する。誘起電圧の大きさを変えるように二次電流を調節すれば無効電力を調節でき、誘起電圧の位相を変えるように二次電流を調節すれば有効電力が調節できる。
【0004】
ところで、発電電動機1の一次電圧の大きさをV1、有効、無効電力をP1、Q1とすれば、
P1≒V1・I2P
Q1≒V1(I2Q−I2m)
の関係が成り立つような直交する二次電流成分I2P、I2Qを選択できることが知られている。ここで、I2mは発電電動機1の一次側に電流が流れていない状態で、誘起電圧が系統電圧と一致するときの二次電流成分である。
このように選択された二次電流成分において、I2Qを変えると誘起電圧の大きさが変化し、無効電力が調節できる。また、I2PはI2Qに直交しているので、I2Pを変えると誘起電圧の位相が変化し、有効電力を調節できる。発電電動機1の電力P1、Q1と交流電力系統の電力P、Qの二次電流に対する変化は同じであるから、有効電力制御器9、無効電力制御器10によりそれぞれ出力された二次電流指令値I2Pref、I2Qrefに応じて二次電流が制御されると、系統電力P、Qがその指令値Pref、Qrefに一致するように動作する。
【0005】
次に、電流制御型電力変換回路4の動作について、以下に説明する。
電流制御型電力変換回路4は、例えばサイクロコンバータやインバータとコンバータとの組み合わせのように、交流電力を周波数の異なる交流電力に変換する電力変換回路とその電流が電流指令に一致するように動作する制御回路とで構成され、発電電動機1の二次電流が指令値に一致するように発電電動機1に印加する電圧を調節する。なお、電流制御型電力変換回路4の動作及び二次周波数の大きさに係る詳細な説明は、上述した公知例「巻線形誘導機の有効・無効電力制御方式」またはB.K.Bose著(秦泉寺、内藤訳)、「パワーエレクトロニクス&ACドライブ」昭和62年9月15日発行等に記載されている。
【0006】
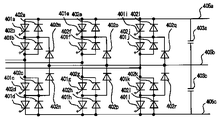
このような電力変換回路4は電力半導体素子のスイッチング動作を利用しているため、その出力には本来必要とする周波数以外の高調波成分を含有している。発電電動機1の二次側に印加された高調波成分は、一次側にも流出して発電電力の高調波成分となる。このため、電力変換回路4は、高調波成分が十分小さくなるよう構成されるものであり、その構成例を図8に示す。
図8は、例えば「大容量GTO変換器の可変速揚水二次励磁装置への適用」、電気学会研究会資料SPC−93−40、pp99〜107に記載された、交流励磁発電電動機に適用されたダイオードクランプ形3レベル電力変換回路を示す構成図で、直流から交流へ変換する部分の回路を示すものである。図において、401a〜401lはGTOサイリスタ、402a〜402rはダイオード、403a、403bはコンデンサ、404a〜404cは三相交流端子、405aは直流高圧側端子、405cは直流低圧側端子、405bは直流中性点である。
この電力変換回路4内の電力半導体素子である各GTOサイリスタ401a〜401lを、パルス幅変調などによりオン・オフ制御して、交流出力を得て発電電動機1の二次側に供給する。この場合、電圧、電流の極性が交互に変化するため、電力半導体に流れる電流が分散される。
【0007】
【発明が解決しようとする課題】
ところで、上述した従来の可変速発電電動機システムでは、発電電動機1の二次側へ供給する電圧、電流の周波数f2は、一次側、即ち交流電力系統3の周波数f1と発電電動機の回転子周波数fr=PP・N/60(ここでPPは発電電動機の極対数、Nは1分あたりの回転数)との差であり、即ち
f2=f1−fr
で表される。交流電力系統3の周波数f1はほぼ一定であるから、回転子が、系統周波数f1と同期する同期速度から離れるに従い二次周波数f2は大きくなるが、回転子が系統周波数f1とほぼ同期している場合(f1=fr)、二次周波数f2は、ほぼ0となる。即ち、通常、交流を出力する電力変換回路4から直流の電圧電流を発電電動機1の二次側に供給することになる。
【0008】
電力変換回路4が直流の電圧電流を供給する場合について以下に説明する。
例えば、パルス幅変調により、交流端子404aが正の電圧、電流を供給する場合、GTOサイリスタ401a、401bの組み合わせとGTOサイリスタ401b、401cの組み合わせとを交互にオンさせる動作を繰り返し、電流を直流側から交流側へ流す。GTOサイリスタ401a、401bをオンさせると、電流は直流高圧側端子405aからGTOサイリスタ401a、401bを介して交流端子404aへ流れ、GTOサイリスタ401b、401cをオンさせると、電流は直流中性点405bからダイオード402mとGTOサイリスタ401bとを介して交流端子404aへ流れる。従って、この場合GTOサイリスタ401bには常に電流が流れる状態となる。
【0009】
従来の可変速発電電動機システムは以上のように構成されているので、発電電動機1の速度が電力系統3の同期速度付近に滞在すると、電力変換回路4の出力が直流となり、それに伴い上記のように電力変換回路4の一部の電力半導体素子に電流が集中する。このため、電力半導体素子が加熱により劣化したり、破壊されることがあった。
【0010】
この発明は、上記のような問題点を解消するために成されたものであって、発電電動機の速度が電力系統の同期速度付近に滞在することを抑制して、発電電動機二次側の電力変換装置内の素子破壊を防止できる可変速発電電動機システムを得ることを目的とする。
【0011】
【課題を解決するための手段】
この発明に係る請求項1記載の可変速発電電動機システムは、一次側が交流電力系統に接続され、二次側が電力変換装置により励磁される発電電動機と、該発電電動機の一次側の有効電力、無効電力をそれぞれ検出する手段と、該検出された有効電力、無効電力が各指令値と一致するように上記電力変換装置を制御する有効電力制御手段、無効電力制御手段とを備えて上記発電電動機を可変速運転するシステムであって、上記電力変換装置の熱的耐量に対する限界状態を、該電力変換装置から上記発電電動機の二次側に供給される電圧、電流の周波数によって検出し、該二次側周波数に応じて上記有効電力の指令値を補正演算して上記一次側の有効電力を制御するものである。
【0012】
またこの発明に係る請求項2記載の可変速発電電動機システムは、請求項1において、上記有効電力制御手段の前段に上記電力指令値を補正演算する電力指令修正手段を備え、検出された上記二次側周波数が零付近である所定の範囲内であるとき、上記二次側周波数が上記所定の範囲を外れるように上記電力指令修正手段にて上記電力指令値を補正演算するものである。
【0013】
またこの発明に係る請求項3記載の可変速発電電動機システムは、請求項2ににおいて、検出された上記二次側周波数の符号を変化させない方向に、上記電力指令修正手段にて上記電力指令値を補正演算するものである。
【0014】
またこの発明に係る請求項4記載の可変速発電電動機システムは、請求項2ににおいて、検出された上記二次側周波数の変化率の極性を変化させない方向に、上記電力指令修正手段にて上記電力指令値を補正演算するものである。
【0015】
またこの発明に係る請求項5記載の可変速発電電動機システムは、請求項2〜4のいずれかにおいて、上記電力指令修正手段にリミッタ回路を設け、補正演算された上記電力指令値が所定の電力範囲を超えるとき、該電力指令値に上記補正演算と逆方向の再補正を行うことにより、上記所定の電力範囲内であって、しかも上記二次側周波数が上記所定の範囲を外れるような電力指令値を演算させるものである。
【0016】
またこの発明に係る請求項6記載の可変速発電電動機システムは、請求項2〜5のいずれかにおいて、検出された上記二次側周波数が上記零付近である所定の範囲内に所定の時間連続して滞在したことを検出して、上記電力指令修正手段にて上記電力指令値を補正演算するものである。
【0017】
またこの発明に係る請求項7記載の可変速発電電動機システムは、請求項2〜6のいずれかにおいて、上記二次周波数の検出値が上記電力指令値の補正演算により上記零付近である所定の範囲を外れ、該所定の範囲を外れた状態を所定の時間継続したことを検出して上記電力指令修正手段による上記電力指令値の補正演算を解除するものである。
【0018】
【発明の実施の形態】
実施の形態1.
以下、この発明の実施の形態1を図について説明する。
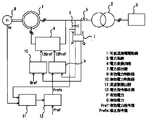
図1は、この発明の実施の形態1による可変速発電電動機システムの例を示す構成図である。
図において、1は発電電動機、2は変圧器、3は交流電力系統、4は電流制御型電力変換回路、5は電流検出器、6は電圧検出器、7は電力検出器、8は速度検出器、9は有効電力制御器、10は無効電力制御器、11は二次周波数検出器、12は電力指令修正器である。
【0019】
次に、動作について説明する。
二次周波数検出器11では、速度検出器8で検出した回転子の速度N(Nは1分あたりの回転数)と、電圧検出器6で検出された交流電力系統3の電圧とが入力され、二次周波数f2を出力する。この二次周波数f2と有効電力指令値Prefとは電力指令修正器12に入力され、電力指令修正器12は、有効電力制御器9の指令値となる修正指令値Prefaを出力する。また、無効電力指令値Qrefは、そのまま無効電力制御器10に入力される。
交流電力系統3の有効電力と無効電力とは、電流検出器5と電圧検出器6によって検出される交流電力系統3の電流電圧から電力検出器7により演算される。有効電力制御器9、無効電力制御器10では、検出された電力P、Qと、入力された修正指令値Prefa、無効電力指令値Qrefとに応じて、直交する二次電流成分I2P、I2Qに対する二次電流指令値I2Pref、I2Qrefを出力し、電力P、Qが入力された各指令値Prefa、Qrefに一致するように動作する。なお、直交する二次電流成分I2P、I2Q、およびそれによる有効電力、無効電力の制御については、上述した従来のものと同様である。
【0020】
また、図2は、発電電動機1の二次側(回転子側)の周波数を検出する二次周波数検出器11の詳細な構成を示す構成図である。図において111は周波数検出器、112はゲイン手段、113は減算器である。
このような二次周波数検出器11では、まず電圧検出器6で検出された交流電力系統3の電圧Vが入力され、周波数検出器111が交流系統3の周波数f1を検出する。さらに速度検出器8で検出した回転子の速度Nにゲイン112を掛けて周波数frを得る。Nが例えば1分あたりの回転数の場合、PPを発電電動機1の極対数とすればゲイン112は(PP/60)である。そして、減算器113により、系統周波数f1から回転子周波数frを減算してて二次周波数f2を得る。
【0021】
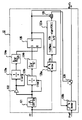
さらに、図3は、有効電力の指令値を修正する電力指令修正器12の詳細な構成を示す構成図である。図において121は存在関数発生器、122はインバータ、123a、123bはリセット付き積分器、124a、124bはヒステリシス比較器、125はフリップフロップ、126a、126bはホールド回路、127は修正量演算回路、128は乗算回路、129は加算回路である。
このような電力指令修正器12の詳細な動作を説明する。
電力指令修正器12では、二次周波数検出器11の出力である二次周波数f2が入力されると、存在関数発生器121は二次周波数f2が零付近(例えf2が±Δf2の範囲内)のときに”1”を、それ以外では”0”を出力する。この存在関数発生器121の出力を、リセット付き積分器123bの入力およびその積分器のリセット信号とする。リセット信号は論理反転形であり、存在関数発生器121の出力が0のときにリセット状態で、1のときはリセット解除となる。即ち、リセット付き積分器123bは、存在関数発生器121の出力が0のときにはリセットされて0を出力し、1のときはリセットが解除されて入力1を積分する。ヒステリシス比較器124bでは、リセット付き積分器123bの出力を入力として、所定値Tkと比較し、リセット付き積分器123bの出力がTkよりも大きい場合には1を出力する。
【0022】
電力指令修正器12に入力された二次周波数f2が零付近にあると、リセット付き積分器123bの入力は1であり、ヒステリシス比較器124bは二次周波数f2が零付近にTk期間滞在したときに1を出力する。
リセット付き積分器123aおよびヒステリシス比較器124aもほぼ同様の動作であるが、リセット付き積分器123aの入力はインバータ122で論理反転しているので、ヒステリシス比較器124aの出力は二次周波数f2が零付近から離れてからToff期間後に1となる。2つのヒステリシス比較器124a、124bの出力はそれぞれフリップフロップ125のリセット(R)とセット(S)に入力される。
従って、フリップフロップ125の出力は、二次周波数f2が零付近に連続して滞在する期間がTkを越えると1にセットされ、その後零付近から離れ、その離れた状態の継続期間がToffを越えると0にリセットされる。
ところで、電力変換器4を構成する電力半導体素子は、通電期間が継続することにより徐々に加熱され、ある期間を経過して熱的耐量を超えると破損する。このため、二次周波数f2が零付近になっても、電力変換器4が熱的に耐えうる期間を予め実績データなどから求め、その期間をTk期間として設定する。ヒステリシス比較器124bは二次周波数f2が零付近にTk期間滞在したときに1を出力するため、電力変換器4の熱的耐量に対する限界状態が検出される。また、限界状態まで加熱された電力変換器4が冷却されるのに要する時間をToff期間として設定しておく。ヒステリシス比較器124aの出力は二次周波数f2が零付近から離れてからToff期間後に1となるため、電力変換器4が冷却されたことが検出される。
【0023】
ホールド回路126aは、フリップフロップ125の出力が0から1に変化する立ち上がりエッジをトリガとして出力をホールドし、1から0に変化する立ち下がりエッジでホールドを解除する。すなわち、二次周波数f2が零付近にTk期間滞在してヒステリシス比較器124bが1を出力すると、フリップフロップの出力が0から1に変化し、ホールド回路126aがその時点における二次周波数f2の値f2kを保持し出力する。
そして、修正量演算回路127は、保持された二次周波数の値f2kに応じて、有効電力の修正量を演算する。
ここで、発電電動機1は、一次側の有効電力が増大するように制御することで減速し、有効電力を低減するように制御することで加速する。上述したように、二次周波数f2は、系統周波数f1から回転子周波数frを減算したもの(f2=f1−fr)であり、系統周波数f1はほぼ一定である。このため、二次周波数f2が零付近のとき、発電電動機1を加速あるいは減速することで回転子周波数frを変化させると、二次周波数f2は零付近の所定の範囲(±Δf2)から外れる。
この場合、修正量演算回路127は、発電電動機1が加速するように、即ち、有効電力が低減するように有効電力の指令値に対する修正量を演算し、これにより、二次周波数f2が−Δf2よりも小さくなるようにする。
【0024】
修正量演算回路127における修正量の演算、および有効電力制御器9の指令値となる修正指令値Prefaを出力する動作について以下に説明する。
修正量演算回路127では、ホールド回路126aからの出力f2kを入力として、有効電力指令値の修正量ΔPを以下の式で演算して出力する。
ΔP=−ΔPmax{(f2k/Δf2)+1}/2
ここで、ΔPmaxの値は、予め設定された修正量の上限である。f2k=−Δf2のときは、回転速度は同期速度よりも大きく(fr>f1)、ΔP=0となり修正量は零である。f2k=+Δf2のときは、回転速度が同期速度よりも小さく(fr<f1)、ΔP=−ΔPmaxとなり、有効電力を低減することにより発電電動機1を加速して、二次周波数f2を−Δf2よりも小さくなるようにする。f2kが±Δf2の範囲にあるときは、修正量は−ΔPmax〜0の範囲を出力して、f2kが−Δf2から離れているほど修正量ΔPを負に大きくして、発電電動機1を加速する。発電電動機1の加速はそのトルクに比例するので、上記のような二次周波数の一次式で与えられる修正量ΔPにより、ほぼ同じ期間で二次周波数f2を−Δf2よりも小さくなるように、即ち零付近である±Δf2の範囲外にすることができる。
【0025】
修正量演算回路127の出力はフリップフロップ125の出力と乗算器128でかけ算される。乗算器128は、二次周波数f2が零付近にTk期間連続して滞在したときには修正量演算回路127の出力を、零付近を離れてToff期間経ると零を加算器129へ出力する。有効電力指令値Prefはホールド回路126bに入力され、フリップフロップ125の出力が0から1へ変化したとき指令値Prefを保持し、1から0へ変化したときに保持を解除する。従って、乗算器128が修正量演算回路127の出力を出力しているときは、指令値Prefをホールド回路126bでホールドし、加算器129にて、その指令値Prefに修正量ΔPを加算して修正指令値Prefaを出力する。そして、フリップフロップ125の出力が1から0に変化すると、指令値Prefのホールドを解除するとともに乗算器128の出力も零となる。
【0026】
このように、電力指令修正器12によって、二次周波数f2が零付近にある場合に有効電力の指令値を修正した修正指令値Prefaを出力して、この修正指令値Prefaに応じて発電電動機1の有効電力を制御するため、二次周波数f2が零付近である±Δf2の範囲を外れ、所定期間Toff経過後には通常の動作に復帰する。このように有効電力の指令を修正することは、本来の所望の制御とは異なる状態を作るものであるが、二次周波数f2を零付近から外すために必要な修正量は悪影響を及ぼさない程度の僅かなものであり、また、継続した制御の中の過渡的な一時の状態であるため問題ない。
【0027】
以上の動作により、二次周波数f2が零付近に所定の時間を超えて連続して滞在することが回避でき、電力変換回路4から直流の電圧電流が発電電動機1の二次側に供給されることが抑制できる。このため、電力変換回路4の特定の電力半導体素子に電流が集中して素子の劣化や破壊を招くことが防止できる。
また、二次周波数f2が零付近に連続して滞在可能な時間(Tk)を設定しているため、電力変換回路4が熱的な耐量を超えることなく運転できる間は、極力通常運転を継続し、発電電動機1の能力を効率よく用いることができる。
さらに、二次周波数f2が零付近に滞在して有効電力指令を修正することで零付近から離れた後、所定の時間(Toff)経過後に通常運転に戻すことにしたため、電力変換回路4内の加熱された電力半導体素子が十分に放熱して冷めた状態になってから通常運転に戻すことができ、電力変換回路4が信頼性良く運転できる。
【0028】
以上のように、この実施の形態では、電力変換回路4の熱的な耐量を、二次周波数f2の範囲(±Δf2)とその継続期間(Tk)とで設定し、二次周波数f2を観測することで電力変換回路4の熱的耐量を検出して、これに応じて有効電力の指令値を修正した。これにより、電力変換回路4を常に熱的耐量を超えないように運転することができ、電力変換回路4内の熱的破壊を防止でき、発電電動機システムの信頼性が向上する。
【0029】
なお、この実施の形態では、修正量演算回路127において、発電電動機1が加速するように有効電力指令値の修正量を演算したが、発電電動機1が減速するように、即ち二次周波数f2が+Δf2よりも大きくなるように、有効電力指令値の修正量を演算しても同様の効果がある。
また、修正量の演算は上述した演算式に限るものではなく、一次式以外の高次式や非線形式でも良い。
さらに、二次周波数検出器11、有効電力修正器12、有効電力制御器9、無効電力制御器10はマイクロプロセッサによるソフトウェアでも実現することができる。
【0030】
実施の形態2.
図4は、この発明の実施の形態2による可変速発電電動機システムにおける電力指令修正器12を示す構成図である。
この実施の形態では、電力指令修正器12内の修正量演算回路127aにおいて、有効電力指令値の修正量ΔPを、二次周波数f2の符号に応じて演算する。
図に示すように、修正量演算回路127aでは、ホールド回路126aからの出力f2kを入力として、有効電力指令値の修正量ΔPを以下の式で演算して出力する。
ΔP=−ΔPmax{(f2k/Δf2)−sign(f2k)}/2
ここで、ΔPmaxの値は、予め設定された修正量の上限である。
【0031】
f2k=±Δf2のときは、ΔP=0であり修正量は零である。
f2kが0〜+Δf2のときは、回転速度が同期速度よりも小さく(fr<f1)、ΔP=−ΔPmax{(f2k/Δf2)−1}/2となり、加算器129で電力指令Prefに正の修正量ΔPが加算されて発電電動機1は減速する方向に制御される。即ち、零付近の二次周波数f2が正の時、二次周波数f2が+Δf2よりも大きくなるように制御される。
逆に、f2kが−Δf2〜0のときは、回転速度が同期速度よりも大きく(fr>f1)、ΔP=−ΔPmax{(f2k/Δf2)+1}/2となり、加算器129で電力指令Prefに負の修正量ΔPが加算されて発電電動機1は加速する方向に制御される。即ち、零付近の二次周波数f2が負の時、二次周波数f2が−Δf2よりも小さくなるように制御される。
f2k=0のときは、sign(f2k)を1あるいは−1とすることで、修正量ΔPの演算式を同様に適用でき、発電電動機1は減速あるいは加速するように制御されて二次周波数f2を±Δf2の範囲外にすることができる。
【0032】
この実施の形態では、上記のように、有効電力指令値の修正量ΔPを、二次周波数f2の符号を変化させない方向に演算するため、上記実施の形態1と同様の効果を得ると共に、二次周波数f2が零付近の運転を回避する場合に速度変化が小さい方向に制御され、少ない修正量で動作する。
【0033】
実施の形態3.
図5は、この発明の実施の形態3による可変速発電電動機システムにおける電力指令修正器12を示す構成図である。
この実施の形態では、電力指令修正器12内の修正量演算回路127bにおいて、有効電力指令値の修正量ΔPを、二次周波数f2の変化率の符号に応じて演算する。
図に示すように、変化率演算回路130は二次周波数f2の時間に対する変化率を演算する。ホールド回路126cはホールド回路126aと同様の動作であるが、入力が変化率演算回路130の出力であり、ホールド回路126aがf2kを出力するタイミングで、f2kの変化率df2kを出力する。修正量演算回路127bでは、ホールド回路126aからの出力f2kと、ホールド回路126cからの出力df2kとを入力として、df2kの符号sign(df2k)に応じて有効電力指令値の修正量ΔPを以下の式で演算して出力する。
ΔP=−ΔPmax{(f2k/Δf2)−sign(df2k)}/2
ここで、ΔPmaxの値は、予め設定された修正量の上限である。
【0034】
f2kの変化率df2kが正の場合は、二次周波数f2が正方向に+Δf2よりも大きくなるように制御される。即ち、加算器129で電力指令Prefに正の修正量ΔPが加算されて発電電動機1は減速する方向に制御される。
f2kの変化率df2kが負の場合は、二次周波数f2が負方向に−Δf2よりも小さくなるように制御される。即ち、加算器129で電力指令Prefに負の修正量ΔPが加算されて発電電動機1は加速する方向に制御される。
この場合も、変化率df2kが0のときは、sign(df2k)を1あるいは−1とすることで、修正量ΔPの演算式を同様に適用でき、発電電動機1は減速あるいは加速するように制御されて二次周波数f2を±Δf2の範囲外にすることができる。
【0035】
この実施の形態では、上記のように、有効電力指令値の修正量ΔPを、二次周波数f2の変化率の符号を変化させない方向に演算するため、上記実施の形態1と同様の効果を得ると共に、二次周波数f2が零付近の運転を回避する場合に、二次周波数f2が変化する方向へ制御し、移行すべき動作点の方向へ回避することができ、制御がスムーズに行える。
なお、この実施の形態では、二次周波数f2の変化率に応じて移行する方向を決めているが、電力系統においては一次周波数f1がほぼ一定であり、回転速度の変化率に応じて制御しても同様の効果がある。
【0036】
実施の形態4.
図6は、この発明の実施の形態3による可変速発電電動機システムにおける電力指令修正器12を示す構成図である。
この実施の形態では、上記実施の形態2で示した様に、修正量演算回路127aにて演算された修正量ΔPを用いて有効電力指令を修正した後、リミッタ131により、指令値を発電電動機1の出力可能範囲であるPmin〜Pmaxに制限して、修正指令値Prefaを出力する。
図に示すように、減算器132は、リミッタ131の前後の信号の差を演算し、その出力が零のときはリミッタ131の入力がPmin〜Pmaxの範囲にあり、比較演算器133はその入力が零のときには零を出力し、ゲイン134出力も0となる。このとき、修正量演算回路127aの出力により修正された電力指令を修正指令値Prefaとして出力する。
リミッタ131の入力がPmaxを越えていると、減算器132は正の値を出力し、比較演算回路133は1を出力する。リミッタ131の入力がPmin未満のときは減算器132は負の値を出力し、比較演算回路133は−1を出力する。比較演算回路133の出力にはゲイン134でΔPmax倍(ΔPmax<(Pmax−Pmin))されて減算器135でリミッタ131の出力から差し引かれる。すなわち、修正量演算回路127aの出力により修正された電力指令が、Pmaxを越えた場合にはΔPmaxが減算され、Pmin未満の場合はΔPmaxが加算されて、修正指令値Prefaが出力される。
【0037】
修正量演算回路127aでは二次周波数f2のホールド値f2kの符号に応じて、該符号を変化させない方向に修正量が演算されているが、減算器135で±ΔPmaxが減算されると、先の修正と逆方向の修正となり、f2kの符号が変化する方向に再度修正することになる。これにより、修正指令値Prefaを常に発電電動機1の出力可能範囲(Pmin〜Pmax)内で演算することができ、制御の信頼性が向上し、二次周波数f2を±Δf2の範囲外に確実に移行させることができる。
【0038】
【発明の効果】
以上のようにこの発明に係る請求項1記載の可変速発電電動機システムは、一次側が交流電力系統に接続され、二次側が電力変換装置により励磁される発電電動機と、該発電電動機の一次側の有効電力、無効電力をそれぞれ検出する手段と、該検出された有効電力、無効電力が各指令値と一致するように上記電力変換装置を制御する有効電力制御手段、無効電力制御手段とを備えて上記発電電動機を可変速運転するシステムであって、上記電力変換装置の熱的耐量に対する限界状態を、該電力変換装置から上記発電電動機の二次側に供給される電圧、電流の周波数によって検出し、該二次側周波数に応じて上記有効電力の指令値を補正演算して上記一次側の有効電力を制御するため、電力変換装置を常に熱的耐量を超えないように運転することが可能になり、電力変換装置内の素子の熱的破壊を防止でき、発電電動機システムの信頼性が向上する。
【0039】
またこの発明に係る請求項2記載の可変速発電電動機システムは、請求項1において、上記有効電力制御手段の前段に上記電力指令値を補正演算する電力指令修正手段を備え、検出された上記二次側周波数が零付近である所定の範囲内であるとき、上記二次側周波数が上記所定の範囲を外れるように上記電力指令修正手段にて上記電力指令値を補正演算するため、電力変換装置から直流の電圧電流が発電電動機の二次側に供給されることが抑制でき、電力変換装置内の素子の熱的破壊を防止でき、発電電動機システムの信頼性が向上する。
【0040】
またこの発明に係る請求項3記載の可変速発電電動機システムは、請求項2ににおいて、検出された上記二次側周波数の符号を変化させない方向に、上記電力指令修正手段にて上記電力指令値を補正演算するため、該補正演算のための修正量が小さく、電力変換装置内の素子の熱的破壊を容易で確実に防止でき、発電電動機システムの信頼性が向上する。
【0041】
またこの発明に係る請求項4記載の可変速発電電動機システムは、請求項2ににおいて、検出された上記二次側周波数の変化率の極性を変化させない方向に、上記電力指令修正手段にて上記電力指令値を補正演算するため、二次周波数が変化する方向へ移行させて零付近を外れるようにするため、スムーズな制御を継続でき、電力変換装置内の素子の熱的破壊を容易で確実に防止でき、発電電動機システムの信頼性が向上する。
【0042】
またこの発明に係る請求項5記載の可変速発電電動機システムは、請求項2〜4のいずれかにおいて、上記電力指令修正手段にリミッタ回路を設け、補正演算された上記電力指令値が所定の電力範囲を超えるとき、該電力指令値に上記補正演算と逆方向の再補正を行うことにより、上記所定の電力範囲内であって、しかも上記二次側周波数が上記所定の範囲を外れるような電力指令値を演算させるため、電力指令値を常に上記電力範囲内で補正演算することができ、制御の信頼性が向上し、二次周波数を零付近を外れるように確実に移行させることができて、電力変換装置内の素子の熱的破壊を確実に防止できる。
【0043】
またこの発明に係る請求項6記載の可変速発電電動機システムは、請求項2〜5のいずれかにおいて、検出された上記二次側周波数が上記零付近である所定の範囲内に所定の時間連続して滞在したことを検出して、上記電力指令修正手段にて上記電力指令値を補正演算するため、極力通常運転を継続し、発電電動機の能力を効率よく用いることができる。
【0044】
またこの発明に係る請求項7記載の可変速発電電動機システムは、請求項2〜6のいずれかにおいて、上記二次周波数の検出値が上記電力指令値の補正演算により上記零付近である所定の範囲を外れ、該所定の範囲を外れた状態を所定の時間継続したことを検出して上記電力指令修正手段による上記電力指令値の補正演算を解除するため、電力変換装置内の素子が十分に放熱する時間が確保でき、発電電動機システムの信頼性が向上する。
【図面の簡単な説明】
【図1】この発明の実施の形態1による可変速発電電動機システムの構成図である。
【図2】この発明の実施の形態1による可変速発電電動機システムにおける二次周波数検出器の詳細構成図である。
【図3】この発明の実施の形態1による可変速発電電動機システムにおける電力指令修正器の詳細構成図である。
【図4】この発明の実施の形態2による可変速発電電動機システムにおける電力指令修正器の詳細構成図である。
【図5】この発明の実施の形態3による可変速発電電動機システムにおける電力指令修正器の詳細構成図である。
【図6】この発明の実施の形態4による可変速発電電動機システムにおける電力指令修正器の詳細構成図である。
【図7】従来の可変速発電電動機システムの構成図である。
【図8】従来の可変速発電電動機システムにおける電力変換回路の構成図である。
【符号の説明】
1 可変速発電電動機、3 電力系統、4 電力変換回路、7 電力検出器、9 有効電力制御器、10 無効電力制御器、11 周波数検出器、
12 電力指令修正器、P 有効電力、Q 無効電力、
Pref 有効電力指令値、Prefa 修正指令値。
Claims (7)
- 一次側が交流電力系統に接続され、二次側が電力変換装置により励磁される発電電動機と、該発電電動機の一次側の有効電力、無効電力をそれぞれ検出する手段と、該検出された有効電力、無効電力が各指令値と一致するように上記電力変換装置を制御する有効電力制御手段、無効電力制御手段とを備えて上記発電電動機を可変速運転する可変速発電電動機システムにおいて、上記電力変換装置の熱的耐量に対する限界状態を、該電力変換装置から上記発電電動機の二次側に供給される電圧、電流の周波数によって検出し、該二次側周波数に応じて上記有効電力の指令値を補正演算して上記一次側の有効電力を制御することを特徴とする可変速発電電動機システム。
- 上記有効電力制御手段の前段に上記電力指令値を補正演算する電力指令修正手段を備え、検出された上記二次側周波数が零付近である所定の範囲内であるとき、上記二次側周波数が上記所定の範囲を外れるように上記電力指令修正手段にて上記電力指令値を補正演算することを特徴とする請求項1記載の可変速発電電動機システム。
- 検出された上記二次側周波数の符号を変化させない方向に、上記電力指令修正手段にて上記電力指令値を補正演算することを特徴とする請求項2記載の可変速発電電動機システム。
- 検出された上記二次側周波数の変化率の極性を変化させない方向に、上記電力指令修正手段にて上記電力指令値を補正演算することを特徴とする請求項2記載の可変速発電電動機システム。
- 上記電力指令修正手段にリミッタ回路を設け、補正演算された上記電力指令値が所定の電力範囲を超えるとき、該電力指令値に上記補正演算と逆方向の再補正を行って、上記所定の電力範囲内であって、しかも上記二次側周波数が上記所定の範囲を外れるような電力指令値を演算させることを特徴とする請求項2〜4のいずれかに記載の可変速発電電動機システム。
- 検出された上記二次側周波数が上記零付近である所定の範囲内に所定の時間連続して滞在したことを検出して、上記電力指令修正手段にて上記電力指令値を補正演算することを特徴とする請求項2〜5のいずれかに記載の可変速発電電動機システム。
- 上記二次周波数の検出値が上記電力指令値の補正演算により上記零付近である所定の範囲を外れ、該所定の範囲を外れた状態を所定の時間継続したことを検出して上記電力指令修正手段による上記電力指令値の補正演算を解除することを特徴とする請求項2〜6のいずれかに記載の可変速発電電動機システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002162230A JP2004015854A (ja) | 2002-06-04 | 2002-06-04 | 可変速発電電動機システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002162230A JP2004015854A (ja) | 2002-06-04 | 2002-06-04 | 可変速発電電動機システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004015854A true JP2004015854A (ja) | 2004-01-15 |
Family
ID=30431019
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002162230A Pending JP2004015854A (ja) | 2002-06-04 | 2002-06-04 | 可変速発電電動機システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004015854A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012091102A1 (ja) * | 2010-12-28 | 2012-07-05 | 三菱重工業株式会社 | 風力発電装置の制御装置、風力発電システム、及び風力発電装置の制御方法 |
| JP2012231624A (ja) * | 2011-04-27 | 2012-11-22 | Fuji Electric Co Ltd | 風力発電用電力変換装置 |
| US9341163B2 (en) | 2010-12-28 | 2016-05-17 | Mitsubishi Heavy Industries, Ltd. | Wind-turbine-generator control apparatus, wind turbine generator system, and wind-turbine-generator control method |
-
2002
- 2002-06-04 JP JP2002162230A patent/JP2004015854A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012091102A1 (ja) * | 2010-12-28 | 2012-07-05 | 三菱重工業株式会社 | 風力発電装置の制御装置、風力発電システム、及び風力発電装置の制御方法 |
| CN103052794A (zh) * | 2010-12-28 | 2013-04-17 | 三菱重工业株式会社 | 风力发电装置的控制装置、风力发电系统及风力发电装置的控制方法 |
| US9341163B2 (en) | 2010-12-28 | 2016-05-17 | Mitsubishi Heavy Industries, Ltd. | Wind-turbine-generator control apparatus, wind turbine generator system, and wind-turbine-generator control method |
| JP2012231624A (ja) * | 2011-04-27 | 2012-11-22 | Fuji Electric Co Ltd | 風力発電用電力変換装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2008227057B2 (en) | Motor drive using flux adjustment to control power factor | |
| US6326762B1 (en) | Method of braking a vector controlled induction machine, control device for carrying out the method and storage medium | |
| KR900001790B1 (ko) | 전동기 구동용 전원장치 | |
| US20020171387A1 (en) | Apparatus and method for controlling permanent magnet electric machines | |
| JP5359245B2 (ja) | モータ駆動装置 | |
| JP6704523B2 (ja) | サイリスタ起動装置 | |
| JP2024040616A (ja) | 制御装置 | |
| Chakraborty et al. | Control of a waveshaper-MMC with thyristor-based front-end converter for open-end winding variable speed medium-voltage induction motor drive | |
| Kiran et al. | Model predictive field oriented speed control of brushless doubly-fed reluctance motor drive | |
| JP3914106B2 (ja) | ガスタービン発電システム及びその制御方法 | |
| JP3884260B2 (ja) | 風力発電装置 | |
| JP2018057131A (ja) | フライホイール蓄電システム | |
| US10951144B2 (en) | Thyristor starter | |
| JP2004015854A (ja) | 可変速発電電動機システム | |
| JP6697129B2 (ja) | サイリスタ起動装置 | |
| JP4788949B2 (ja) | 誘導電動機の可変速駆動装置 | |
| KR101996838B1 (ko) | 유도 전동기 제어 시스템 | |
| JP4771035B2 (ja) | 永久磁石同期機の制御装置 | |
| Aleenejad et al. | A new modulated model predictive control for permanent magnet synchronous motor | |
| JP6781343B2 (ja) | サイリスタ起動装置 | |
| JP7315799B1 (ja) | サイリスタ起動装置 | |
| JP2891030B2 (ja) | 交流励磁同期機の2次励磁装置 | |
| CN114766078A (zh) | 逆变器控制装置 | |
| Al-nabi et al. | High power CSI-fed IPM drive system control with minimum dc-link current | |
| Okazaki et al. | A speed-sensorless startup of an induction motor driven by a modular multilevel cascade inverter (MMCI-DSCC)-Applications to quadratic-torque loads like fans, blowers, and compressors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041115 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070202 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071113 |