JP2004015978A - リニアモータ - Google Patents
リニアモータ Download PDFInfo
- Publication number
- JP2004015978A JP2004015978A JP2002169913A JP2002169913A JP2004015978A JP 2004015978 A JP2004015978 A JP 2004015978A JP 2002169913 A JP2002169913 A JP 2002169913A JP 2002169913 A JP2002169913 A JP 2002169913A JP 2004015978 A JP2004015978 A JP 2004015978A
- Authority
- JP
- Japan
- Prior art keywords
- shape
- axis
- function
- linear motor
- magnetic pole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000010586 diagram Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 5
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 4
- 230000000052 comparative effect Effects 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Linear Motors (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
【解決手段】リニアモータの固定子又はスライダに形成される永久磁石1の磁極又は歯の外形形状を双曲線関数で表される形状20若しくは三角関数余弦の逆数の関数で表される形状とする。すなわち、固定子とスライダの相対移動方向と平行な線で永久磁石1の磁極又は歯を切断したときのギャップ側外形形状を双曲線関数で表される形状20若しくは三角関数余弦の逆数の関数で表される形状とする。これによって、外形形状が、直線、円弧、放物線、双曲線で形成された従来のリニアモータよりもコギングトルクを小さくすることができる。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、リニアモータに関する。特にリニアモータにおけるギャップ部を形成する磁極若しくは歯の形状に特徴を有するリニアモータに関する。
【0002】
【従来の技術】
リニアモータにおけるコギングトルクは、ギャップを形成する固定子とスライダ(可動子)に設けられた磁極と該磁極と対向して設けられた歯の形状によって決まる。コギングトルクを減少させるため磁極又は歯の形状を特別な形としたものが種々提案されている。
【0003】
図11は、従来の界磁磁極を永久磁石で構成した固定子又はスライダの構成の説明図である。鉄等の磁性材料で構成されたプレート10上に相互に略平行に複数の永久磁石1が並置されて固定子又はスライダが構成されている。モータとしてのギャップを構成する面(反プレート側)の形状は、この図11に示す例ではフラットに形成され、固定子とスライダの相対移動方向に平行な線方向にこの永久磁石1を切断した断面形状のギャップ側の外形形状が直線31で形成されている。
【0004】
図12は、他の従来例の磁極形状の例である。この図12で示す例では、プレート10上に並置された永久磁石1を固定子とスライダの相対移動方向に切断した断面形状のギャップ側の外形形状は円弧形状32とされている。
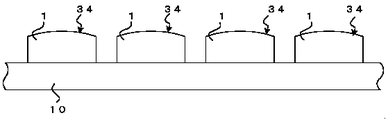
図13は、同様に、永久磁石1の断面形状のギャップ側の外形形状が放物線形状33とされた従来例であり、図14は、双曲線形状34とした従来例である。上述したように、磁極の形状をいろいろと変更し、コギングトルクを減少させる試みが多くなされている。
【0005】
【発明が解決しようとする課題】
そこで、本発明の目的は、従来のリニアモータと比較しコギングトルクを小さいものにしたリニアモータを提供することにある。
【0006】
【課題を解決するための手段】
本発明のリニアモータは、ギャップ部を構成する磁極またはそれに対向する歯の一方若しくは両方のギャップ対向面の外形形状を、双曲線関数で表される形状若しくは三角関数余弦の逆数の関数で表される形状を主体として構成する。具体的にはギャップ対向面の外形形状の全部または1部、又は中央付近を、双曲線関数で表される形状若しくは三角関数余弦の逆数の関数で表される形状とする。
【0007】
前記双曲線関数は、磁極またはそれに対向する歯の中心軸上のある点からの距離をR、前記線とのなす角をθとしたとき、
R=A−B*(eC θ+e−C θ)
(ただし、A,B,Cは定数,eは自然対数の底または定数)
とする。又は、磁極またはそれに対向する歯の中心軸をX軸、該X軸と直交する軸をY軸とし、このX軸とY軸との交点を原点としたXY座標系において、前記双曲線関数を、
X=A−B*(eCY+e−CY)
(ただし、A,B,Cは定数,eは自然対数の底または定数)
とする。
【0008】
また、前記三角関数余弦の逆数の関数を、磁極またはそれに対向する歯の中心軸上のある点からの距離をR、前記線とのなす角をθとしたとき、
R=A−B/cos(Cθ)
(ただし、A,B,Cは定数)
とする。また、磁極またはそれに対向する歯の中心軸をX軸、X軸と直交する軸をY軸とし、このX軸とY軸との交点を原点としたXY座標系において、前記三角関数余弦の逆数の関数を、
X=A−B/cos(CY)
(ただし、A,B,Cは定数)
とする。
そして、前記関数で示される外形形状上の点列の間を直線または、曲線で結んだ形状で加工して形成する。
【0009】
【発明の実施の形態】
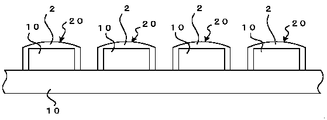
図1は、本発明の第1の実施形態の永久磁石で界磁磁極を構成する固定子又はスライダ(可動子)の説明図である。
鉄等の磁性材料で構成されたプレート10上に相互に略平行に、磁極を構成する複数の永久磁石1が並置されて固定子又はスライダは構成されている。永久磁石1のギャップを構成する側(反プレート側)の形状がこの実施形態では双曲線関数で表される形状20に形成されている。
【0010】
すなわち、永久磁石1が複数平行に配設された方向である、固定子とスライダ(可動子)が相対移動する方向(図1で左右方向)と並行な線で、永久磁石1を切断したときの断面形状において、ギャップ側(反プレート側)の輪郭外形形状が双曲線関数で表される形状20に形成されている。
【0011】
この双曲線関数の形状20は、磁極を構成する永久磁石1の中心軸(永久磁石1の前記断面形状における中心を通る、図1における1点破線で示すX軸)上のある点からの距離をR、前記中心線とのなす角をθとしたとき、次の1式の前記双曲線関数で表される形状である。
R=A−B*(eC θ+e−C θ) …(1)
なお、A,B,Cは定数,eは自然対数の底または定数である。
【0012】
また、前記中心軸をX軸、該X軸と直交する軸をY軸(固定子とスライダが相対移動する方向で、永久磁石1の断面方向)とし、このX軸とY軸との交点を原点としたXY座標系において、永久磁石1の断面外形形状を次の2式で示される双曲線関数で表される形状20とする。
X=A−B*(eCY+e−CY) …(2)
なお、A,B,Cは定数,eは自然対数の底または定数である。
上記2式から明らかのように、Y=0のときX=A−2Bとなる。すなわち、中心軸であるX軸線上に永久磁石1の頂点があり、この頂点より(A−2B)の位置がこのXY座標系の原点である。
【0013】
永久磁石1のギャップに対向する側の全面にわたって、上述した1式、2式の関数で示される双曲線関数で表される形状20としてもよいが、永久磁石1の対向する側形状の中央付近だけでもよい。すなわち上記X軸で表される永久磁石の中心軸の両側の中央部付近だけ、双曲線関数で表される形状20としても、後述するように、コギングトルクを減少させることができる。
【0014】
図2は、本発明の永久磁石で界磁磁極を構成する固定子又はスライダ(可動子)の第2の実施形態の説明図である。この第2の実施形態は図1に示した第1の実施形態と比較し、永久磁石1の上にコア2が接合され、このコア2の外形形状が上述した双曲線関数で表される形状20に形成されている点である。他は第1の実施形態と同一である。
【0015】
図3は、永久磁石で界磁磁極を構成する固定子又はスライダ(可動子)の第3の実施形態の説明図である。第1の実施形態と相違する点は、磁極を構成する永久磁石1がコア2で覆われ、このコア2のギャップ側の外形形状が双曲線関数で表される形状20に形成されている点である。他は第1の実施形態と同一である。
【0016】
図4は、このリニアモータをリラクタンス型モータで形成する場合の第4の実施形態であり、電力が供給されない非コイル側(二次側)の固定子又はスライダ(可動子)の歯の形状を説明する説明図である。なお、リニアモータを構成する固定子又はスライダ(可動子)において、以下、電力が供給される側を一次側、供給されない側を二次側と呼ぶ。
【0017】
リラクタンス型モータの場合、二次側はコアによる歯3が形成される。この第4の実施形態のリニアモータにおいては、このコアで形成された歯3の外形形状を上述したような双曲線関数で表される形状20に形成するものである。すなわち、第1の実施形態において、永久磁石1の形状と第4の実施形態のコアの歯の形状はほぼ同一であり、永久磁石1かコアかの違いである。
【0018】
上述した第1〜第4の実施形態において、磁極(永久磁石1)又は歯3のギャップに対向する面の全領域を双曲線関数で表される形状20としても、また、中央付近だけでも双曲線関数の形状20とすることによって、コギングトルクを減少させることができる。
【0019】
図5〜図8に示す実施形態は、モータのギャップに対面する磁極又は歯の外形形状を三角関数余弦の逆数で表される形状とするものである。上述した第1〜第4の実施形態では、モータのギャップに対面する磁極又は歯の外形形状を、上述した1式又は2式で表されるような双曲線関数で表される形状としたものである。この図5〜図8に示す第5〜第6の実施形態では、この外形形状を双曲線関数で表される形状に代えて三角関数余弦の逆数の関数で表される形状とするものである。
【0020】
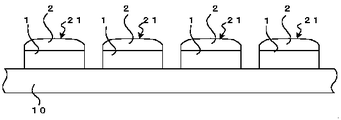
図5に示す第5の実施形態は、磁極を構成する永久磁石1の外形形状を三角関数余弦の逆数で表される形状21としたもので、この点が図1に示した第1の実施形態と相違するのみで、他は第1の実施形態と同一である。永久磁石1の中心軸(永久磁石1を固定子とスライダの相対移動方向と平行な線(Y軸)で切断したときの断面形状において、該断面形状の中心を通る、図5における1点破線で示すX軸)上のある点からの距離をR、前記中心線とのなす角をθとしたとき、次の3式の三角関数余弦の逆数の関数で表される外形形状21とする。
R=A−B/cos(Cθ) …(3)
なお、A,B,Cは定数である。
【0021】
また、前記中心軸をX軸、永久磁石1の切断方向をY軸とし、このX軸とY軸との交点を原点としたXY座標系において、三角関数余弦の逆数を用いた4式で表される形状を永久磁石のギャップ側の外形形状21とする。
X=A−B/cos(CY) …(4)
なお、A,B,Cは定数である。また、Y=0でX=A−Bとなり、この位置が最大値であることから、永久磁石1の頂点から中心軸(X軸)に沿ってA−Bの位置が、このXY座標系の原点となる。
【0022】
図6に示す第6の実施形態は、永久磁石1の上にコア2を接合したもので、図2に示した第2の実施形態と相違する点は、コア2のギャップ側の外形形状が双曲線関数で表される形状から、前記3式、4式で示される三角関数余弦の逆数を用いた形状に代わった点である他は第2の実施形態と同一である。
【0023】
図7に示す第7の実施形態は、永久磁石1をコア2で覆ったもので、図3に示した第3の実施形態と相違する点は、コア2のギャップ側の外形形状が双曲線関数の形状から、前記3式、4式で示される三角関数余弦の逆数の関数で表される形状に代わった点である。他は第3の実施形態と同一である。
【0024】
図8に示す第8の実施形態は、図4に示した第4の実施形態と同様に、リラクタンス型モータを形成するリニアモータの二次側の固定子又はスライダの説明図である。この第8の実施形態と図4に示す第4の実施形態の差異は、コアで形成された歯4のギャップ側の外形形状が、前記3式、4式で示される三角関数余弦の逆数の関数で表される形状21で形成されている点である。他は第4の実施形態と同一である。
【0025】
上述した磁極の外形形状を双曲線関数で表される形状20又は三角関数余弦の逆数の関数で表される形状21を加工する場合、双曲線関数で表される形状20又は三角関数余弦の逆数の関数で表される形状21に対して、これら形状上の点列を直線又は曲線で結んだ形状として加工されることになる。また、図2〜図4、図6〜図8で示す実施形態のように、双曲線関数の関数で表される形状20又は三角関数余弦の逆数の関数で表される形状21をコアで形成する場合には、積層する各薄鋼板の形を積層したとき前記形状20又は形状21になるように形成しておく。
【0026】
この図5〜図8に示した実施形態においても、磁極(永久磁石1)又は歯4は、ギャップに対向する側の全面にわたって、上述した3式、4式の関数で示される三角関数余弦の逆数の関数で表される形状21としてもよく、中央部付近だけでもよい。すなわち図5に表した中心軸(X軸)の両側の中央部だけ、三角関数余弦の逆数を用いた形状21としても、コギングトルクを減少させることができる。
【0027】
本発明の効果をみるために、磁極又は歯の外形形状が直線、円弧、放物線、双曲線の従来技術と、本発明の外形形状が双曲線関数で表される図1で示される実施形態の形状のもの、三角関数余弦の逆数の関数で表される図5で示される実施形態の形状のものを比較実験した。
【0028】
リニアモータのモデル例は、図9に示すように、プレート10上に永久磁石1を並列に配置した二次側を固定子50とし、一次側の電力が供給されるコイル側をスライダ60とした。図9において、一次側のスライダ60は、コイルが巻かれるコアの歯40の形状を示しコイルは図示していない。
【0029】
永久磁石(磁極)1の奥行き(図1、図5、図11〜図13において紙面垂直な方向)は一定とし、スライダ60と固定子50の永久磁石1の頂点間のギャップが一定(プレート2から永久磁石1の最大高さ一定)、永久磁石1の体積一定とした。ただし、図11に示す永久磁石の断面のギャップ側外形形状が直線のものはギャップのみ一定とした。この磁極(永久磁石)の形状の比較を図10に示す。この図10に示すように、外側から順に、三角関数余弦の逆数の形状、双曲線関数の形状、円弧形状、放物線形状(破線)、双曲線形状である。円弧形状と放物線形状(破線)はほとんど重なっている。
コギングトルクを測定した結果は次の通りである。コギングトルクのNは力の単位のニュートン、率は、双曲線関数の形状を基準にしたものである。
【0030】
磁極の外形形状 コギングトルク 率
三角関数余弦の逆数 25.0N −16.2%
双曲線関数 29.8N 0
円弧 31.0N +3.9%
放物線 31.7N +6.5%
双曲線 35.2N +18.0%
直線 89.6N 201.0%
以上の通り、磁極の外形形状を三角関数余弦の逆数の関数で表される形状で構成したときが最小のコギングトルクとなり、次に双曲線関数で表されるの形状としたときが、コギングトルクが少ない。
【0031】
なお上述したように、磁極又は歯を固定子とスライダの相対移動方向と平行な線方向に切断した断面のギャップに対向する側の外形形状を、対向する側全領域にわたって、三角関数余弦の逆数の形状、又は双曲線関数の形状としてもよいが、周辺部は影響が少ないことから、中央部、すなわち、磁極又は歯の頂点付近を三角関数余弦の逆数の形状、又は双曲線関数の形状とするだけでも、同様な効果を得ることができる。
【0032】
また上述した実施形態では、二次側の磁極又は歯の外形形状を三角関数余弦の逆数の形状、又は双曲線関数の形状とする例を述べたが、一次側の歯又は磁極の外形形状を同様に三角関数余弦の逆数の形状又は双曲線関数の形状とすることによって、同様な効果を奏することができる。このとき、2時側の磁極又は歯は、図11に示すような直線形状でよい。さらに、一次側、二次側両方の磁極又は歯の外形形状を三角関数余弦の逆数の関数で表される形状又は双曲線関数で表される形状とするようにしてもよい。
【0033】
【発明の効果】
本発明のリニアモータは従来のリニアモータと比較し、コギングトルクを小さくすることができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態の永久磁石で磁極を構成する固定子又はスライダの説明図である。
【図2】本発明の第2の実施形態の永久磁石で磁極を構成する固定子又はスライダの説明図である。
【図3】
本発明の第3の実施形態の永久磁石で磁極を構成する固定子又はスライダの説
明図である。
【図4】
本発明の第4の実施形態のリラクタンスでリニアモータを形成するときの非励
磁側の固定子又はスライダの説明図である。
【図5】
本発明の第5の実施形態の永久磁石で磁極を構成する固定子又はスライダの説
明図である。
【図6】
本発明の第6の実施形態の永久磁石で磁極を構成する固定子又はスライダの説
明図である。
【図7】
本発明の第7の実施形態の永久磁石で磁極を構成する固定子又はスライダの説
明図である。
【図8】
本発明の第8の実施形態のリラクタンスでリニアモータを形成するときの非励
磁側の固定子又はスライダの説明図である。
【図9】
本発明のリニアモータと従来のリニアモータで発生するコギングトルクを比較
するためのリニアモータのモデル例の構成を示す図である。
【図10】
磁極の外形形状の比較例である。
【図11】
磁極の断面外形形状が直線である従来のリニアモータの固定子又はスライダの
説明図である。
【図12】
磁極の断面外形形状が円弧である従来のリニアモータの固定子又はスライダの
説明図である。
【図13】磁極の断面外形形状が放物線である従来のリニアモータの固定子又はスライダの説明図である。
【図14】磁極の断面外形形状が双曲線である従来のリニアモータの固定子又はスライダの説明図である。
【符号の説明】
1 永久磁石(磁極)
2 コア
3、4 歯
10 プレート
20 双曲線関数の形状
21 三角関数余弦の逆数で表される形状
31 直線形状
32 円弧形状
33 放物線形状
34 双曲線形状
40 歯
50 固定子
60 スライダ
Claims (11)
- ギャップ部を構成する磁極またはそれに対向する歯の一方若しくは両方のギャップ対向面の外形形状を、双曲線関数で表される形状を主体として構成することを特徴とするリニアモータ。
- ギャップ部を構成する磁極またはそれに対向する歯の一方若しくは両方のギャップ対向面の外形形状の全部または1部を、双曲線関数で表される形状としたことを特徴とするリニアモータ。
- ギャップ部を構成する磁極またはそれに対向する歯の一方若しくは両方のギャップ対向面の外形形状の少なくとも中央付近を、双曲線関数で表される形状としたことを特徴とするリニアモータ。
- 磁極またはそれに対向する歯の中心軸上のある点からの距離をR、前記線とのなす角をθとしたとき、前記双曲線関数を、
R=A−B*(eC θ+e−C θ)
(ただし、A,B,Cは定数,eは自然対数の底または定数)
とした請求項1乃至4の内のいずれかの1項記載のリニアモータ。 - 磁極またはそれに対向する歯の中心軸をX軸、該X軸と直交する軸をY軸とし、このX軸とY軸との交点を原点としたXY座標系において、前記双曲線関数を、
X=A−B*(eCY+e−CY)
(ただし、A,B,Cは定数,eは自然対数の底または定数)
とした請求項1乃至4の内のいずれかの1項記載のリニアモータ。 - ギャップ部を構成する磁極またはそれに対向する歯の一方若しくは両方のギャップ対向面の外形形状を、三角関数余弦の逆数の関数で表される形状を主体として構成することを特徴とするリニアモータ。
- ギャップ部を構成する磁極またはそれに対向する歯の一方若しくは両方のギャップ対向面の外形形状の全部または1部を、三角関数余弦の逆数の関数で表される形状とすることを特徴とするリニアモータ。
- ギャップ部を構成する磁極またはそれに対向する歯の一方若しくは両方のギャップ対向面の外形形状の少なくとも中央付近を、三角関数余弦の逆数の関数で表される形状で構成することを特徴とするリニアモータ。
- 磁極またはそれに対向する歯の中心軸上のある点からの距離をR、前記線とのなす角をθとしたとき、前記三角関数余弦の逆数の関数を、
R=A−B/cos(Cθ)
(ただし、A,B,Cは定数)
とした請求項6乃至8の内のいずれかの1項記載のリニアモータ。 - 磁極またはそれに対向する歯の中心軸をX軸、X軸と直交する軸をY軸とし、このX軸とY軸との交点を原点としたXY座標系において、前記三角関数余弦の逆数の関数を、
X=A−B/cos(CY)
(ただし、A,B,Cは定数)
とした請求項6乃至8の内のいずれかの1項記載のリニアモータ。 - 請求項1乃至10のいずれか1項記載のリニアモータであって、前記外形形状上の点列の間を直線または、曲線で結んだ形状で加工して形成されいることを特徴とするリニアモータ。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002169913A JP3848596B2 (ja) | 2002-06-11 | 2002-06-11 | リニアモータ |
| US10/425,971 US6873066B2 (en) | 2002-06-11 | 2003-04-30 | Linear motor |
| EP05022611A EP1619780B1 (en) | 2002-06-11 | 2003-05-23 | Linear motor |
| DE60333796T DE60333796D1 (de) | 2002-06-11 | 2003-05-23 | Linearmotor |
| DE60304937T DE60304937T2 (de) | 2002-06-11 | 2003-05-23 | Linearmotor |
| EP03253281A EP1372251B1 (en) | 2002-06-11 | 2003-05-23 | Linear motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002169913A JP3848596B2 (ja) | 2002-06-11 | 2002-06-11 | リニアモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004015978A true JP2004015978A (ja) | 2004-01-15 |
| JP3848596B2 JP3848596B2 (ja) | 2006-11-22 |
Family
ID=29561744
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002169913A Expired - Fee Related JP3848596B2 (ja) | 2002-06-11 | 2002-06-11 | リニアモータ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6873066B2 (ja) |
| EP (2) | EP1372251B1 (ja) |
| JP (1) | JP3848596B2 (ja) |
| DE (2) | DE60304937T2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010531130A (ja) * | 2007-06-25 | 2010-09-16 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 12個のステータ歯と10個のロータ極とを有する同期モータ |
| WO2011155022A1 (ja) * | 2010-06-08 | 2011-12-15 | 株式会社日立製作所 | リニアモータ |
| JP2012228049A (ja) * | 2011-04-19 | 2012-11-15 | Fanuc Ltd | コギングトルクを低減するモータおよびリニアモータ |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004045992A1 (de) * | 2004-09-22 | 2006-04-06 | Siemens Ag | Elektrische Maschine |
| ITUD20040231A1 (it) * | 2004-12-14 | 2005-03-14 | Gisulfo Baccini | Motore lineare |
| JP2006174583A (ja) * | 2004-12-15 | 2006-06-29 | Fanuc Ltd | リニアモータ |
| DE102006050251A1 (de) * | 2006-10-27 | 2008-05-08 | Robert Bosch Gmbh | Linearmotorbaureihe |
| US8067863B2 (en) * | 2007-01-18 | 2011-11-29 | Bose Corporation | Detent force correcting |
| US20100038987A1 (en) * | 2008-08-14 | 2010-02-18 | Infinite Wind Energy LLC | Motors Having a Hyperbolic Cosine Curve Shape |
| CN101777821A (zh) * | 2010-04-12 | 2010-07-14 | 哈尔滨工业大学 | 集中绕组分段式永磁同步直线电机 |
| DK2525479T3 (da) * | 2011-05-18 | 2020-01-06 | Siemens Gamesa Renewable Energy As | Synkron permanentmagnetmaskine |
| JP5199427B2 (ja) * | 2011-08-25 | 2013-05-15 | ファナック株式会社 | 織布を用いたリニアモータ用磁石板、該磁石板を備えたリニアモータ及び該磁石板の製造方法 |
| JP5438159B2 (ja) * | 2012-03-19 | 2014-03-12 | ファナック株式会社 | 磁石の位置ずれ防止作用を有するリニアモータ用磁石板 |
| US10447102B2 (en) * | 2013-03-15 | 2019-10-15 | Regal Beloit Australia Pty. Ltd. | Permanent magnet electrical machines and methods of assembling the same |
| JP6128206B2 (ja) * | 2013-03-22 | 2017-05-24 | 日立金属株式会社 | リニアモータ |
| JP5758966B2 (ja) | 2013-10-11 | 2015-08-05 | ファナック株式会社 | コギングトルクを低減可能な同期電動機 |
| CN106787599B (zh) * | 2017-01-23 | 2018-11-23 | 北京理工大学 | 一种带有反向槽的永磁同步线形电机 |
| US10418889B2 (en) | 2017-01-31 | 2019-09-17 | Regal Beloit Australia Pty Ltd. | Modular stator for axial flux electric machines and methods of assembling the same |
| US10541591B2 (en) | 2017-01-31 | 2020-01-21 | Regal Beloit Australia Pty, Ltd. | Composite stator for axial flux electric machines and methods of assembling the same |
| US10770940B2 (en) | 2017-01-31 | 2020-09-08 | Regal Beloit Australia Pty Ltd. | Modular rotors for axial flux electric machines |
| US10320268B2 (en) | 2017-01-31 | 2019-06-11 | Regal Beloit Australia Pty Ltd | Modular stator drive units for axial flux electric machines |
| US10594180B2 (en) | 2017-01-31 | 2020-03-17 | Regal Beloit America, Inc. | Magnetic flux guides for electric machines |
| CN213461502U (zh) * | 2020-09-04 | 2021-06-15 | 瑞声科技(南京)有限公司 | 永磁直线电机 |
| CN118117781B (zh) * | 2024-04-28 | 2024-07-16 | 比亚迪股份有限公司 | 定子、悬浮电机、悬架系统及车辆 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2785406B2 (ja) | 1990-01-08 | 1998-08-13 | 神鋼電機株式会社 | リニアサーボモータ |
| JP3152405B2 (ja) * | 1992-06-10 | 2001-04-03 | オークマ株式会社 | 電動機 |
| JP3150822B2 (ja) | 1993-04-30 | 2001-03-26 | オークマ株式会社 | リニアモータ |
| JP3220898B2 (ja) | 1995-06-28 | 2001-10-22 | 三菱電機株式会社 | リニアモータ |
| DE19829052C1 (de) * | 1998-06-29 | 1999-12-30 | Siemens Ag | Synchronlinearmotor |
| US6441522B1 (en) * | 2000-03-31 | 2002-08-27 | Coleman Powermate, Inc. | Electromagnetic apparatus employing high permeability low conductivity element |
| JP3513467B2 (ja) | 2000-06-16 | 2004-03-31 | ファナック株式会社 | 同期電動機のロータ |
| JP3785984B2 (ja) * | 2001-10-22 | 2006-06-14 | 株式会社デンソー | 回転電機 |
-
2002
- 2002-06-11 JP JP2002169913A patent/JP3848596B2/ja not_active Expired - Fee Related
-
2003
- 2003-04-30 US US10/425,971 patent/US6873066B2/en not_active Expired - Lifetime
- 2003-05-23 DE DE60304937T patent/DE60304937T2/de not_active Expired - Lifetime
- 2003-05-23 EP EP03253281A patent/EP1372251B1/en not_active Expired - Lifetime
- 2003-05-23 DE DE60333796T patent/DE60333796D1/de not_active Expired - Lifetime
- 2003-05-23 EP EP05022611A patent/EP1619780B1/en not_active Expired - Lifetime
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010531130A (ja) * | 2007-06-25 | 2010-09-16 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 12個のステータ歯と10個のロータ極とを有する同期モータ |
| WO2011155022A1 (ja) * | 2010-06-08 | 2011-12-15 | 株式会社日立製作所 | リニアモータ |
| JP5655071B2 (ja) * | 2010-06-08 | 2015-01-14 | 株式会社日立製作所 | リニアモータ |
| JP2012228049A (ja) * | 2011-04-19 | 2012-11-15 | Fanuc Ltd | コギングトルクを低減するモータおよびリニアモータ |
Also Published As
| Publication number | Publication date |
|---|---|
| DE60304937D1 (de) | 2006-06-08 |
| EP1619780A1 (en) | 2006-01-25 |
| DE60304937T2 (de) | 2006-10-26 |
| US6873066B2 (en) | 2005-03-29 |
| EP1619780B1 (en) | 2010-08-11 |
| EP1372251A2 (en) | 2003-12-17 |
| DE60333796D1 (de) | 2010-09-23 |
| EP1372251A3 (en) | 2004-03-10 |
| US20030227221A1 (en) | 2003-12-11 |
| EP1372251B1 (en) | 2006-05-03 |
| JP3848596B2 (ja) | 2006-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004015978A (ja) | リニアモータ | |
| US8446054B2 (en) | Periodic magnetic field generation device, and linear motor and rotary motor using the same | |
| US8421294B2 (en) | Rotary electric machine including auxiliary slot with center opposed to specified rotor portion | |
| US6774521B2 (en) | Brushless DC motor | |
| WO2001080408A1 (en) | Permanent magnet synchronous linear motor | |
| EP2515417A1 (en) | A synchronous permanent magnet machine | |
| JP2002010541A (ja) | 同期電動機のロータ | |
| CN109417315B (zh) | 具有带耦合齿的定子的马达 | |
| CN102064618A (zh) | 一种减小齿槽效应的永磁电机设计方法以及永磁电机 | |
| JP2003023740A (ja) | 永久磁石型電動機の永久磁石型回転子 | |
| JP2001346368A (ja) | 永久磁石内蔵型同期モータ | |
| JP2002209371A (ja) | リニアモータ | |
| JP2022535940A (ja) | ロータコンポーネント及びコンシクエントポール型モータ | |
| CN105576938A (zh) | 直线电动机 | |
| EP1248346A2 (en) | Permanent magnet motor | |
| JP5621372B2 (ja) | 永久磁石埋込型回転子及び回転電機 | |
| JP6949269B1 (ja) | 電動機 | |
| JP2008029078A (ja) | 永久磁石形同期電動機 | |
| JP2012023855A (ja) | 永久磁石埋込型回転子及び回転電機 | |
| JP7182100B2 (ja) | 回転電機の鉄心 | |
| JP2649403B2 (ja) | 交流モータ | |
| JPH1189145A (ja) | 永久磁石形モータ | |
| JP3491880B2 (ja) | 直進電機 | |
| JP3491881B2 (ja) | 直進電機 | |
| WO2022180871A1 (ja) | ロータ及び当該ロータを備えるモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050426 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060825 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3848596 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090901 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100901 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110901 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110901 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120901 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120901 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130901 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |