JP2004015982A - ハイブリッド変速機の変速制御装置 - Google Patents
ハイブリッド変速機の変速制御装置 Download PDFInfo
- Publication number
- JP2004015982A JP2004015982A JP2002170168A JP2002170168A JP2004015982A JP 2004015982 A JP2004015982 A JP 2004015982A JP 2002170168 A JP2002170168 A JP 2002170168A JP 2002170168 A JP2002170168 A JP 2002170168A JP 2004015982 A JP2004015982 A JP 2004015982A
- Authority
- JP
- Japan
- Prior art keywords
- generator
- motor
- target
- output
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Arrangement Of Transmissions (AREA)
- Hybrid Electric Vehicles (AREA)
- Structure Of Transmissions (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】共線図上に4個の回転メンバが存在するハイブリッド変速機において、エンジンの応答遅れによってもバッテリへの充放電が多発することのない変速制御とする。
【解決手段】決定部34は目標エンジン出力tPeを最低燃費で発生させる目標エンジントルクtTeおよび目標エンジン回転数tNeを決定する。演算部35は、第1モータ/ジェネレータの目標回転数tNm1を共線図上の回転バランス式から求める。演算部36は、第1モータ/ジェネレータの実回転数Nm1を目標回転数tNm1に一致させるための当該モータ/ジェネレータの目標トルクtTm1をフィードバック制御により求める。演算部37は、モータ/ジェネレータの発電電力および消費電力が一致するダイレクト配電となる第2モータ/ジェネレータの目標トルクtTm2を求める。目標トルクtTe,tTm1,tTm2をエンジン制御および両モータ/ジェネレータの制御に供する。
【選択図】 図6
【解決手段】決定部34は目標エンジン出力tPeを最低燃費で発生させる目標エンジントルクtTeおよび目標エンジン回転数tNeを決定する。演算部35は、第1モータ/ジェネレータの目標回転数tNm1を共線図上の回転バランス式から求める。演算部36は、第1モータ/ジェネレータの実回転数Nm1を目標回転数tNm1に一致させるための当該モータ/ジェネレータの目標トルクtTm1をフィードバック制御により求める。演算部37は、モータ/ジェネレータの発電電力および消費電力が一致するダイレクト配電となる第2モータ/ジェネレータの目標トルクtTm2を求める。目標トルクtTe,tTm1,tTm2をエンジン制御および両モータ/ジェネレータの制御に供する。
【選択図】 図6
Description
【0001】
【発明の属する技術分野】
本発明は、エンジン等の原動機とモータ/ジェネレータとを搭載したハイブリッド車両に有用なハイブリッド変速機、特に、これら原動機とモータ/ジェネレータとの間における差動装置により無段変速動作を行わせることが可能なハイブリッド変速機の変速制御装置に関するものである。
【0002】
【従来の技術】
ハイブリッド変速機としては一般的に、シリーズ式と、パラレル式と、両者を組み合わせたシリーズ式+パラレル式の3方式のものが知られているが、いずれもエンジン回転エネルギーの全部または一部を発電機により一旦電気エネルギーに変換し、この電気エネルギーとバッテリからの電力とで車両駆動系に結合されたモータを駆動して車両の走行を行わせ、余剰な電気エネルギーをバッテリに蓄電するのが普通である。
そして、エンジン動作点を最適燃費が実現されるよう定めてバッテリへの充放電をタイミング良く行わせることにより、運転状態に応じた要求駆動力を良好な燃費のもとで発生させ得るものである。
【0003】
従来のハイブリッド変速機の変速制御装置を、特開平9−308012号公報に記載されたシリーズ式+パラレル式のハイブリッド変速機用の変速制御装置について以下に説明する。
この種ハイブリッド変速機は、サンギヤ、リングギヤおよびキャリアよりなる単純遊星歯車組で前記の差動装置を構成し、キャリアに入力軸からのエンジン回転を入力する。
キャリアへの回転は、一方でサンギヤを経てジェネレータ(発電機)に伝達し、他方でリングギヤを経て車輪に伝達するようになし、リングギヤにはモータを結合してこれからの回転をも車輪に伝達するように構成する。
【0004】
上記の構成を共線図により示すと図11および図12に示すごとくに表され、差動装置が、単純遊星歯車組で構成された3要素、2自由度の差動装置であるため、車輪駆動系を結合される出力(Out)要素としてのリングギヤRに上記のモータを直結し、エンジン(ENG)が結合された入力要素としてのキャリアCを挟んで出力Outと反対の側に位置するサンギヤSに上記のジェネレータを結合することとなる。
【0005】
図11および図12に示す共線図において、横軸は遊星歯車組のギヤ比により決まる回転メンバ間の距離比、つまりサンギヤSおよびキャリアC間の距離を1とした時のサンギヤSおよびリングギヤR間の距離の比をσで示すものである。
【0006】
図11の縦軸は、各回転メンバの回転速度、つまりキャリアCへのエンジン回転数Ne、サンギヤS(ジェネレータ)の回転数N1、およびリングギヤR(モータ)からの出力(Out)回転数Noを示し、2個の回転メンバの回転速度が決まれば他の1個の回転メンバの回転速度が決まる。
図11において回転バランス式は、(N1−No)(Ne−No)=(1+σ)σで表され、サンギヤS(ジェネレータ)の回転数N1は、次式により求めることができる。
N1=No+(Ne−No)(1+σ)/σ
【0007】
図12の縦軸は、各回転メンバに働くエンジントルクTe、ジェネレータトルクT1、出力トルクTo、およびモータトルクT2を示し、各回転メンバに結合された回転系のイナーシャを質量と見なし、それぞれに作用する上記のエンジントルクTe、ジェネレータトルクT1、出力トルクTo、およびモータトルクT2に応じて各回転メンバの回転速度は変化する。
ここで、キャリアCに結合した入力回転系はエンジンENGが存在するためその回転イナーシャが大きく、またリングギヤRに結合した出力(Out)回転系も車輪やディファレンシャルギヤ装置などが存在するためその回転イナーシャが大きいことから、共線図上におけるレバー重心Gは図12に示すごとく、イナーシャが大きなキャリアC(エンジンENG)およびリングギヤR(出力Out)間に位置し、この位置を以下ではサンギヤSからの距離Xgcとして示す。
【0008】
定常状態を維持(車速一定で目標駆動トルクを実現)するためには、各回転メンバに働くトルクによる重心G周りの並進運動γおよび回転運動δが共に0であることである。
つまり並進運動γについては、T1+Te+(To+T2)=0が成立し、また回転運動δについては、T1×Xgc+Te(Xgc−1)=(To+T2)(1+σ−Xgc)が成立することである。
これら2式を解いてトルクバランス式は次式で表される。
T1=−Te{σ/(1+σ)}
T2=−To−Te{1/(1+σ)}
【0009】
上記文献に記載されたハイブリッド変速機の変速制御装置にあっては、ジェネレータおよびモータのトルクT1,T2を、概ね以下のようにして決定する。
(1)エンジンのアクセル操作量から車輪の目標駆動トルクToを決定する。
(2)この目標駆動トルクToおよび出力回転No(車速)から目標出力Poを求める。
(3)目標出力Poを発生させる目標エンジン回転数Neおよび目標エンジントルクTeの組み合わせ(例えば最適燃費となる組み合わせ)を決定する。
(4)目標エンジントルクTeおよび目標駆動トルクToを用いて前記のトルクバランス式の演算によりT1,T2を算出する。
(5)目標出力Poが一定になって安定したら、ジェネレータの実回転数が前記回転バランス式から求めた目標回転数N1に一致するようジェネレータのトルクT1をフィードバック制御する。
【0010】
【発明が解決しようとする課題】
ところで、バッテリは周辺の使用環境温度が低下すると急激に性能が低下することが知られており、例えば−30℃のような極低温になると許容可能な充放電量が通常時の数分の一程度まで落ち込むことがある。
そして、許容可能な充放電量を越えた充放電が行われるとバッテリが許容範囲を超えた電圧降下を生じてしまい、劣化が急速に進んで使用寿命を著しく短縮する。
このためハイブリッド変速機にあっては、バッテリへの充放電を制限しながら目標駆動力を実現する変速制御方式が肝要である。
【0011】
しかし実際には、エンジントルクTeがその目標値とずれるのを免れず、そのずれ分が前記の式に入り込んでエネルギーのアンバランスを生じさせ、当該アンバランスをバッテリ電力により解消する必要があることから、前記したジェネレータおよびモータの発電電力および消費電力を一致させてバッテリの充放電を0にすることは従来の変速制御による限り困難であった。
この傾向は、アクセル操作などで目標駆動トルクが変化している間の過渡期において顕著になる。
【0012】
特に、複数の遊星歯車組を組み合わせて差動装置を構成した場合のように、共線図上に配置される回転メンバとして4個以上の回転メンバが存在する2自由度の差動装置を用いる場合は、回転メンバ数の増加によりトルク制御個数が増えて回転メンバ間のトルクの関係が複雑になり、また後記するごとく前記ジェネレータおよびモータの目標トルクにエンジントルクだけでなく変速機出力トルクも関与することから、前記した従来の制御手法ではバッテリの充放電を抑えつつ目標駆動力を実現することが至難の業である。
【0013】
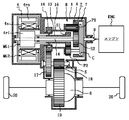
ハイブリッド変速機を図1のような差動装置を用いて構成した場合につき詳述するに、この変速機はエンジンENGに近い前側に設けた差動装置を成すラビニョオ型プラネタリギヤセット2と、また反対の後側に設けたモータ/ジェネレータMG1,MG2を提供する複合電流2層モータ4とで構成する。
ラビニョオ型プラネタリギヤセット2は、ピニオンP1およびリングギヤRを共有するシングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8の組み合わせになり、シングルピニオン遊星歯車組7はサンギヤS2およびリングギヤRにそれぞれピニオンP1を噛合させた構造とし、ダブルピニオン遊星歯車組8はサンギヤS1および共有ピニオンP1の他に大径ピニオンP2を具え、大径ピニオンP2をサンギヤS1および共有ピニオンP1に噛合させた構造とする。
そして遊星歯車組7,8のピニオンP1,P2を全て、共通なキャリアCにより回転自在に支持する。
【0014】
以上の構成になるラビニョオ型プラネタリギヤセット2は、サンギヤS1、サンギヤS2、リングギヤRおよびキャリアCの4個の回転メンバを主たる要素とし、これら回転メンバの回転速度順はサンギヤS1、リングギヤR、キャリアC、サンギヤS2の順番であり、共線図は図2および図3のように表される。
図1における複合電流2層モータ4は、内側ロータ4riと、これを包囲する環状の外側ロータ4roと、これらロータ間における環状ステータ4sとを具え、環状ステータ4sと内側ロータ4riとで内側の第1モータ/ジェネレータMG1を構成し、環状ステータ4sと外側ロータ4roとで外側の第2モータ/ジェネレータMG2を構成する。
【0015】
図2および図3の共線図にも示したが、図1のごとくサンギヤS1にモータ/ジェネレータMG1(内側ロータ4ri)を結合し、リングギヤRにエンジンENGを結合し、キャリアCに車輪駆動系(ディファレンシャルギヤ装置6等)への出力(Out)を結合し、サンギヤS2にモータ/ジェネレータMG2(外側ロータ4ro)を結合する。
モータ/ジェネレータMG1は図2および図3の共線図上においてエンジンENGに近い側にあり、従って以下では、モータ/ジェネレータMG1を入力側モータ/ジェネレータとも称し、モータ/ジェネレータMG2は図2および図3の共線図上において車輪駆動系への出力(Out)に近い側にあり、従って以下では、モータ/ジェネレータMG2を出力側モータ/ジェネレータとも称する。
【0016】
図2および図3の横軸は遊星歯車組7,8のギヤ比により決まる回転メンバ間の距離比、つまりリングギヤRおよびキャリアC間の距離を1とした時のサンギヤS1およびリングギヤR間の距離の比をαで示し、キャリアCおよびサンギヤS2間の距離をβで示したものである。
【0017】
また図2の縦軸は、各回転メンバの回転速度、つまりリングギヤRへのエンジン回転数Ne、サンギヤS1(モータ/ジェネレータMG1)の回転数Nm1、キャリアCからの出力(Out)回転数No、およびサンギヤS2(モータ/ジェネレータMG2)の回転数Nm2を示し、2個の回転メンバの回転速度が決まれば他の2個の回転メンバの回転速度が決まる。
図2において回転バランス式は、(Nm1−No):(Ne−No)=(1+α):1および(Ne−Nm2):(Ne−No)=(1+β):1で表され、モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2はそれぞれ、エンジン回転数Neおよび出力回転数Noから次式により求めることができる。
Nm1=(1+α)Ne−α・No・・・(1)
Nm2=(1+β)No−β・Ne・・・(2)
【0018】
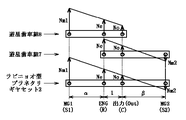
図3の縦軸は、各回転メンバに働くエンジントルクTe、モータ/ジェネレータMG1,MG2のトルクTm1,Tm2、および出力(Out)トルクToを示す。
ここで、リングギヤRに結合した入力回転系はエンジンENGが存在するためその回転イナーシャが大きく、またキャリアCに結合した出力(Out)回転系も車輪やディファレンシャルギヤ装置などが存在するためその回転イナーシャが大きいことから、共線図上におけるレバー重心Gは図3に示すごとく、イナーシャが大きなリングギヤR(エンジンENG)およびキャリアC(出力Out)間に位置し、この位置を以下ではサンギヤS1からの距離Xgcとして示す。
【0019】
定常状態を維持(車速一定で目標駆動トルクを実現)するためには、4個の回転メンバに働くトルクによる重心G周りの並進運動γおよび回転運動δが共に0であることである。
つまり並進運動γについては、Tm1+Te+(To+Tm2)=0が成立し、また回転運動δについては、Tm1×Xgc+Te(Xgc−α)=To(α+1−Xgc)+T2(α+1+β−Xgc)が成立することである。
これら2式を解いてトルクバランス式は次式で表される。
Tm1=−{β・To+(1+β)Te}(α+1+β)・・・(3)
Tm2=−{(1+α)To+α・Te}(α+1+β)・・・(4)
これら(3),(4)式と、図15に示すトルクT1,T2に関連して前記したトルクバランス式との比較から明らかなように、共線図上の回転メンバが4個存在する差動装置を用いたハイブリッド変速機の場合は、Tm1の項にエンジントルクTeだけでなく出力トルクToも関与する。
【0020】
ここで当該ハイブリッド変速機を、前記した文献に記載の変速制御装置と同様な手順(1)〜(5)で変速制御した場合の作用を説明する。
運転者によるアクセル操作で目標駆動トルクToが変化すると、これに応じて変化する目標出力Poを発生させる目標エンジン回転数Neおよび目標エンジントルクTeの組み合わせが決定され、この目標エンジントルクTeおよび目標駆動トルクToを用いて上記(3)式および(4)のようなトルクバランス式の演算によりモータ/ジェネレータ目標トルクTm1,Tm2を決定することになる。
【0021】
ところで、エンジンのトルクに関する目標値からの応答遅れはモータ/ジェネレータのそれに較べて遥かに大きく、またその制御精度も低くて、且つ環境条件や個体差の影響も受け易い。
そのため、モータ/ジェネレータMG1,MG2はそれぞれ大きな応答遅れなしに上記の演算値である目標トルクTm1,Tm2を実現できるのに、エンジンが過渡時において前記の目標トルクTeを達成することができない。
また、(3)式から明らかなようにモータ/ジェネレータ目標トルクTm1に目標駆動トルクToが関与するためトルク変化が大きい上に、モータ/ジェネレータ目標トルクTm2も出力(Out)から離れた結合されるため全体のトルクバランスに(特に重心G周りに回転運動に)与える影響が大きい。
【0022】
そのため特に、共線図上に4個以上の回転メンバが存在する型式のハイブリッド変速機に前記従来の変速制御方式をそのまま適用すると、トルクバランスを取ることができなく、図13に示すごとくアクセル踏み込み瞬時t1の直後の過渡期において各回転メンバの目標トルクは概ね実現されるものの、特に円で囲んで示す箇所においてエンジンの実線で示す実回転数が破線で示す目標値と大きく乖離し、これに伴うパワーバランスのずれを、同じく円で囲んで示すごとくバッテリへの充放電により補償する必要が生ずる。
かかるバッテリへの充放電は、特に極低温時において許容範囲を超えることが多く、バッテリの劣化を早めることになる。
【0023】
本発明は、上記の問題が両モータ/ジェネレータの目標トルクを共線図上のトルクバランス式から求めてそれぞれのトルク制御に供するためであるとの事実認識に基づき、
一方のモータ/ジェネレータの目標トルクは、対応する前記の回転バランス式により求めた当該モータ/ジェネレータの目標回転数に実回転数を一致させるような例えばフィードバック制御により求め、他方のモータ/ジェネレータの目標トルクは両モータ/ジェネレータによる発電電力および消費電力が一致するダイレクト配電となるのに必要なトルクを目標トルクとする構成となし、これにより、
目標駆動力が変化している過渡期においてもエンジントルクの大きな応答遅れや変速機出力トルクに大きく影響されることなく回転メンバの回転数を目標値にほぼ一致させることができるようにすることで、パーワーバランスのずれに伴うバッテリへの充放電を抑制し得るようにしてその寿命低下に関する問題を解消した変速制御が可能なハイブリッド変速機の変速制御装置を提供することを目的とする。
【0024】
【課題を解決するための手段】
この目的のため本発明によるハイブリッド変速機の変速制御装置は、請求項1に記載のごとくに構成する。
つまり、共線図上に4個以上の回転メンバが存在する2自由度の差動装置を具え、共線図上の内側に位置する2個の内側回転メンバにそれぞれ原動機からの入力および駆動系への出力を結合し、共線図上の外側に位置する2個の外側回転メンバにそれぞれ2個のモータ/ジェネレータを結合したハイブリッド変速機を前提とし、
これに対し目標原動機出力演算手段と、原動機動作点決定手段と、入力側モータ/ジェネレータ目標回転数演算手段と、入力側モータ/ジェネレータ目標トルク演算手段と、出力側モータ/ジェネレータ目標トルク演算手段とを設ける。
【0025】
目標原動機出力演算手段は、アクセル操作量から求めた目標駆動トルクと車速とから目標原動機出力を演算し、原動機動作点決定手段は、目標原動機出力を発生させるための目標原動機回転数および目標原動機トルクの組み合わせを決定する。
入力側モータ/ジェネレータ目標回転数演算手段は、目標原動機回転数および車速から共線図上の回転バランス式を解いて、入力側モータ/ジェネレータの目標回転数を求め、入力側モータ/ジェネレータ目標トルク演算手段は、入力側モータ/ジェネレータの実回転数を入力側モータ/ジェネレータ目標回転数に一致させるための入力側モータ/ジェネレータの目標トルクを求める。
そして出力側モータ/ジェネレータ目標トルク演算手段は、両モータ/ジェネレータの実回転数および入力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な出力側モータ/ジェネレータの目標トルクを求める。
そして変速制御装置は、原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、上記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクを達成する。
【0026】
また同じ目的のため本発明によるハイブリッド変速機の変速制御装置は、請求項3に記載のごとくに構成することができる。
つまり、請求項1に記載の場合と同じハイブリッド変速機に対し、目標原動機出力演算手段と、原動機動作点決定手段と、出力側モータ/ジェネレータ目標回転数演算手段と、出力側モータ/ジェネレータ目標トルク演算手段と、入力側モータ/ジェネレータ目標トルク演算手段とを設ける。
目標原動機出力演算手段および原動機動作点決定手段は請求項1におけると同じもので、
出力側モータ/ジェネレータ目標回転数演算手段は、前記目標原動機回転数および車速から共線図上の回転バランス式を解いて、出力側モータ/ジェネレータの目標回転数を求め、出力側モータ/ジェネレータ目標トルク演算手段は、出力側モータ/ジェネレータの実回転数を出力側モータ/ジェネレータ目標回転数に一致させるための出力側モータ/ジェネレータの目標トルクを求める。
【0027】
入力側モータ/ジェネレータ目標トルク演算手段は、両モータ/ジェネレータの実回転数および出力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な入力側モータ/ジェネレータの目標トルクを求める。
そして変速制御装置は、原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、前記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクを達成する。
【0028】
更に同じ目的のため本発明によるハイブリッド変速機の変速制御装置は、請求項5に記載のごとくに構成することができる。
つまり、請求項1,3に記載の場合と同じハイブリッド変速機に対し、目標原動機出力演算手段と、原動機動作点決定手段と、入力側モータ/ジェネレータ目標回転数演算手段と、入力側モータ/ジェネレータ目標トルクフィードバック演算手段と、ダイレクト配電用出力側モータ/ジェネレータ目標トルク演算手段と、出力側モータ/ジェネレータ目標回転数演算手段と、出力側モータ/ジェネレータ目標トルクフィードバック演算手段と、ダイレクト配電用入力側モータ/ジェネレータ目標トルク演算手段と、モータ/ジェネレータ目標トルク選択手段とを設ける。
【0029】
目標原動機出力演算手段および原動機動作点決定手段は請求項1,3に記載のものと同じもので、入力側モータ/ジェネレータ目標回転数演算手段は請求項1に記載のものと同じもので、出力側モータ/ジェネレータ目標回転数演算手段は請求項3に記載のものと同じものである。
入力側モータ/ジェネレータ目標トルクフィードバック演算手段は、入力側モータ/ジェネレータの実回転数を前記入力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により入力側モータ/ジェネレータの目標トルクを求め、
ダイレクト配電用出力側モータ/ジェネレータ目標トルク演算手段は、前記両モータ/ジェネレータの実回転数および前記フィードバック制御により求めた入力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な出力側モータ/ジェネレータの目標トルクを求める。
【0030】
出力側モータ/ジェネレータ目標トルクフィードバック演算手段は、出力側モータ/ジェネレータの実回転数を前記出力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により出力側モータ/ジェネレータの目標トルクを求め、
ダイレクト配電用入力側モータ/ジェネレータ目標トルク演算手段は、前記両モータ/ジェネレータの実回転数および前記フィードバック制御により求めた出力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な入力側モータ/ジェネレータの目標トルクを求める。
【0031】
モータ/ジェネレータ目標トルク選択手段は、前記両モータ/ジェネレータのうち回転数絶対値が低い方のモータ/ジェネレータに係わる目標トルクを前記フィードバック制御による目標トルクとし、他方のモータ/ジェネレータの目標トルクをダイレクト配電用の目標トルクとする。
そして変速制御装置は、原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、前記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクを達成する。
【0032】
【発明の効果】
これら請求項1,3,5に記載された本発明の構成によれば、一方のモータ/ジェネレータの目標トルクは、対応する前記の回転バランス式により求めた当該モータ/ジェネレータの目標回転数に実回転数を一致させるような(請求項3ではフィードバック制御)により求め、他方のモータ/ジェネレータの目標トルクは両モータ/ジェネレータによる発電電力および消費電力が相互に一致するダイレクト配電となるのに必要なトルクとするから、
両モータ/ジェネレータの目標トルクを共線図上のトルクバランス式から求めないこととなって、これらモータ/ジェネレータ目標トルクに原動機出力トルクや変速機出力トルクが関与しないこととなる。
【0033】
従って、目標値に対して大きな応答遅れを持つ原動機出力トルクや、モータ/ジェネレータ目標トルクに大きく関与する変速機出力トルクの影響を排除しつつモータ/ジェネレータ目標をトルク求めることができ、たとえ目標駆動力が変化している過渡期においても原動機出力トルクの大きな応答遅れや変速機出力トルクに大きく影響されることなく回転メンバの回転数を目標値にほぼ一致させ得る。
このため本発明によれば、原動機出力トルクの応答遅れにより回転メンバの回転数が目標値から大きく外れて生ずるパーワーバランスのずれに伴うバッテリへの充放電を抑制することができ、バッテリの寿命低下に関する従来の前記問題を解消し得る。
【0034】
また、特に請求項1に記載の発明によれば、原動機に近い入力側モータ/ジェネレータの実回転数が目標回転数に一致するように(例えばフィードバック制御により)入力側モータ/ジェネレータの目標トルクを求めるから、原動機の実回転数を一層確実に目標回転数に一致させる制御となって、原動機を最適燃費制御する時などにおいてその制御意図を更に確実なものにすることができる。
【0035】
更に、特に請求項5に記載の発明によれば、両モータ/ジェネレータのうち回転数絶対値の低い方のモータ/ジェネレータの実回転数が目標回転数に一致するようフィードバック制御により当該モータ/ジェネレータの目標トルクを求め、他方のモータ/ジェネレータの目標トルクをダイレクト配電により求めたから、ダイレクト配電により一方のモータ/ジェネレータの回転数が0になる可能性を排除して、両モータ/ジェネレータの発電電力と消費電力とが一致してバッテリに対する充放電を抑制する効果を全回転領域で補償することができる。
【0036】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づき詳細に説明する。
図1は、概略については既に前記したが、本発明の一実施の形態になる変速制御装置を適用するためのハイブリッド変速機を例示し、これを本実施の形態においては、前輪駆動車(FF車)用のトランスアクスルとして用いるのに有用な以下に詳述する構成となす。
【0037】
図において1は変速機ケースを示し、該変速機ケース1の軸線方向(図の左右方向)右側(エンジンENGに近い前側)にラビニョオ型プラネタリギヤセット2を、また図の左側(エンジンENGから遠い後側)に例えば複合電流2層モータ4を可とするモータ/ジェネレータ組を内蔵する。
これらラビニョオ型プラネタリギヤセット2および複合電流2層モータ4は変速機ケース1の主軸線上に同軸に配置するが、この主軸線からオフセットさせて平行に配置したカウンターシャフト5およびディファレンシャルギヤ装置6をも変速機ケース1内に内蔵させる。
【0038】
ラビニョオ型プラネタリギヤセット2は、ロングピニオンP1およびリングギヤRを共有するシングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8の組み合わせになり、シングルピニオン遊星歯車組7はサンギヤS2およびリングギヤRにそれぞれロングピニオンP1を噛合させた構造とし、ダブルピニオン遊星歯車組8はサンギヤS1およびロングピニオンP1の他に、大径のショートピニオンP2を備え、ショートピニオンP2をサンギヤS2およびロングピニオンP1に噛合させた構造とする。
そして遊星歯車組7,8のピニオンP1,P2を全て、共通なキャリアCにより回転自在に支持する。
【0039】
以上の構成になるラビニョオ型プラネタリギヤセット2は、サンギヤS1、サンギヤS2、リングギヤR、およびキャリアCの4個の回転メンバを主たる要素とし、これら4個の回転メンバのうち2個のメンバの回転速度を決定すると他のメンバの回転速度が決まる2自由度の差動装置を構成する。
そして4個の回転メンバの回転速度順は、サンギヤS1、リングギヤR、キャリアC、サンギヤS2の順番である。
なお本実施の形態で用いるラビニョオ型プラネタリギヤセット2は、シングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8のリングギヤ同士を結合し、キャリア同士を結合したものに等価である。
【0040】
複合電流2層モータ4は、内側ロータ4riと、これを包囲する環状の外側ロータ4roとを、変速機ケース1内に同軸に回転自在に支持して備え、これら内側ロータ4riおよび外側ロータ4ro間における環状空間に同軸に配置した環状ステ−タ4sを変速機ケース1に固設して構成する。
環状コイル4sと内側ロータ4riとで内側のモータ/ジェネレータである第1のモータ/ジェネレータMG1が構成され、環状コイル4sと外側ロータ4roとで外側のモータ/ジェネレータである第2のモータ/ジェネレータMG2が構成される。
ここでモータ/ジェネレータMG1,MG2はそれぞれ、複合電流を供給される時は供給電流に応じた個々の方向の、また供給電流に応じた個々の速度(停止を含む)の回転を出力するモータとして機能し、複合電流を供給されない時は外力による回転に応じた電力を発生する発電機として機能する。
【0041】
ラビニョオ型プラネタリギヤセット2の上記した4個の回転メンバには、回転速度順に、つまり図2および図3の共線図にも示したがサンギヤS1、リングギヤR、キャリアC、サンギヤS2の順に、第1モータ/ジェネレータMG1、原動機であるエンジンENG、ディファレンシャギヤ装置6を含む車輪駆動系への出力(Out)、第2モータ/ジェネレータMG2をそれぞれ結合する。
【0042】
この結合を図1に基づき以下に詳述するに、リングギヤRを上記の通りエンジン(ENG)回転が入力される入力要素とするため、このリングギヤRをエンジンクランクシャフト9に結合する。
サンギヤS1は中空軸13を介して第1モータ/ジェネレータMG1の内側ロータ4riに結合し、このモータ/ジェネレータMG1および中空軸13を遊嵌する軸14を介してサンギヤS2を第2モータ/ジェネレータMG2の外側ロータ4roに結合する。
【0043】
キャリアCを前記のごとく、車輪駆動系へ回転を出力する出力要素とするため、このキャリアCに中空軸15を介して出力歯車16を結合し、これをカウンターシャフト5上のカウンター歯車17に噛合させる。
カウンターシャフト5には別にファイナルドライブピニオン18を一体的に設け、これを、ディファレンシャルギヤ装置6に設けたファイナルドライブリングギヤ19に噛合させる。
変速機からの出力回転は、ファイナルドライブピニオン18およびファイナルドライブリングギヤ19により構成されるファイナルドライブギヤ組を経てディファレンシャルギヤ装置6に至り、このディファレンシャルギヤ装置により左右駆動輪20に分配されるものとする。
【0044】
上記の構成になるハイブリッド変速機は、前記した通り図2および図3に示すような共線図により表すことができ、この共線図上の回転バランス式は図2に関連して前記した(1),(2)式により表され、またトルクバランス式は図3に関連して前記した(3),(4)式により表される。
【0045】
図2および図3の共線図におけるレバーの傾き(変速比)は、変速機の入力(エンジン)回転数Neと、入力(エンジン)トルクTeとの組み合わせであるエンジン動作点(Ne,Te)、
サンギヤS1に係わるモータ/ジェネレータMG1の回転数Nm1と、トルクTm1との組み合わせであるモータ/ジェネレータ動作点(Nm1,Tm1)、
サンギヤS2に係わるモータ/ジェネレータMG2の回転数Nm2と、トルクTm2との組み合わせであるモータ/ジェネレータ動作点(Nm2,Tm2)により決まり、
これらにより出力Outの回転数No(車速)と、トルクToとの組み合わせ(No,To)が定まる。
【0046】
なお図1ではモータ/ジェネレータMG1,MG2を複合電流2層モータとして構成したが、モータ/ジェネレータMG1,MG2はこれに限られず、例えば図4に示すように、相互に径方向へオフセットさせて配置することができる。
本実施の形態においては、先ずシングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8を図1の場合とは前後逆に配置し、エンジン(ENG)回転を入力されるリングギヤRをショートピニオンP2に噛合させる。
そして、サンギヤS2に係わるモータ/ジェネレータMG2をラビニョオ型プラネタリギヤセット2に同軸に配置したロータ4roおよびステータ4soにより構成し、サンギヤS1に係わるモータ/ジェネレータMG1をラビニョオ型プラネタリギヤセット2の軸線からオフセットさせて配置したロータ4riおよびステータ4siにより構成する。
【0047】
そして、サンギヤS1に結合した駆動軸をモータ/ジェネレータMG2のロータ4roに貫通し、この駆動軸とモータ/ジェネレータMG1のロータ4riとの間をギヤ列3により駆動結合する。
かようにモータ/ジェネレータMG1, MG2を相互に径方向へオフセットさせて配置した構成によれば、両モータ/ジェネレータの配置の自由度が増す。
ラビニョオ型プラネタリギヤセット2およびモータ/ジェネレータMG1, MG2をかように構成した図4に示すハイブリッド変速機も、その共線図は図2および図3に示すように表されることは言うまでもない。
【0048】
上記したハイブリッド変速機の変速制御システムは図5に示すごとく、ハイブリッドコントローラ21を具え、このハイブリッドコントローラ21は後述する目標エンジントルク(tTe)指令をエンジンコントローラ22に供給し、エンジンコントローラ22がエンジンENGを当該目標トルク発生状態で運転させるように機能する。
【0049】
ハイブリッドコントローラ21は更に、モータ/ジェネレータMG1,MG2の目標トルク(tTm1)指令および目標トルク(tTm2)指令をそれぞれモータコントローラ23に供給し、モータコントローラ23がインバータ24およびバッテリ25によりモータ/ジェネレータMG1,MG2をそれぞれの目標トルク発生状態で動作させるように機能する。
【0050】
目標トルクtTe,tTm1,tTm2を求めるためハイブリッドコントローラ21には、アクセルペダル踏み込み量からアクセル開度APOを検出するアクセル開度センサ26からの信号と、車速VSPを検出する車速センサ27からの信号と、エンジン回転数Neを検出するエンジン回転センサ28からの信号と、第1モータ/ジェネレータMg1の回転数Nm1を検出する第1モータ/ジェネレータ回転センサ29からの信号と、第2モータ/ジェネレータMg2の回転数Nm2を検出する第2モータ/ジェネレータ回転センサ30からの信号とを入力する。
ハイブリッドコントローラ21はこれら入力情報を基に、図6にブロック線図で示す処理を行ってハイブリッド変速機の変速制御を以下のごとくに行う。
【0051】
目標駆動トルク演算部31は、センサアクセル開度APOおよび車速VSPから運転者要求している車輪の目標駆動トルクtTdを周知のマップ検索などの手法により求める。
目標エンジン(原動機)出力演算部32は、車速VSPに車輪タイヤ半径などで決まる定数Krを掛けて車輪駆動軸回転数Ndを求め、乗算器32aで車輪駆動軸回転数Ndと上記目標駆動トルクtTdとの乗算により車輪の目標駆動力tPvを算出し、これにモータ/ジェネレータMG1,MG2の損失分を加算して目標エンジン(原動機)出力tPeを求める。
なお、目標エンジン(原動機)出力tPeの算出に当たっては、モータ/ジェネレータMG1,MG2の損失分に加えて、必要に応じラビニョオ型プラネタリギヤセット2の伝動ロス分をも加算することができる。
【0052】
エンジン(原動機)動作点決定部34は、目標エンジン(原動機)出力tPeを発生させるための目標エンジン(原動機)トルクtTeおよび目標エンジン(原動機)回転数tNeの組み合わせとしてエンジン(原動機)動作点を決定する。
かかるエンジン動作点の決定に際し好ましくは、図7に例示するエンジン性能線図を基に目標エンジン(原動機)出力tPeを最低燃費で発生させるエンジントルクTeおよびエンジン回転数Neの組み合わせをエンジン動作点(tTe,tNe)とする最適燃費制御を用いるのが良い。
【0053】
図7は、エンジン出力ごとにこれを発生するエンジントルクTeおよびエンジン回転数Neの組み合わせを等馬力線として示し、各等馬力線上にあって対応するエンジン出力を最低燃費で発生させるエンジントルクTeおよびエンジン回転数Neの組み合わせをA,B点により示し、各等馬力線上の最低燃費点A,Bを結ぶ線を最適燃費線として示す。
図7を基に最適燃費制御によりエンジン動作点(tTe,tNe)を求めるに際しては、目標エンジン(原動機)出力tPeに対応する等馬力線と最適燃費線との交点を例えばA点のように決定し、当該点に対応するエンジントルクTeおよびエンジン回転数Neの組み合わせをエンジン動作点(tTe,tNe)と定める。
【0054】
第1(入力側)モータ/ジェネレータ目標回転数演算部35は、変速機出力回転数Noおよび目標エンジン回転数tNeから、第1(入力側)モータ/ジェネレータMG1の目標回転数tNm1を、前記(1)式に対応する次の回転バランス式
tNm1=(1+α)tNe−α・No・・・(5)
の演算により求める。
【0055】
第1(入力側)モータ/ジェネレータ目標トルク演算部36は、第1(入力側)モータ/ジェネレータMG1の目標回転数tNm1および当該モータ/ジェネレータの実回転数Nm1を入力され、実回転数Nm1をフィードバックゲインKgで目標回転数tNm1に一致させるための当該モータ/ジェネレータMG1の目標トルクtTm1を以下のフィードバック演算により求める。
tTm1=Kg(tNm1−Nm1) ・・・(6)
【0056】
第2(出力側)モータ/ジェネレータ目標トルク演算部37は、両モータ/ジェネレータMG1,MG2の実回転数Nm1,Nm2および上記入力側モータ/ジェネレータ目標トルクtTm1と、インバータ24(図1参照)等による両モータ/ジェネレータMG1,MG2の損失LosMG1,LosMG2から、モータ/ジェネレータMG1,MG2の一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な第2(出力側)モータ/ジェネレータの目標トルクtTm2を次式により求める。
tTm2=−(tTm1×Nm1+LosMG1+LosMG2)/Nm2 ・・・(7)
【0057】
なお、モータ/ジェネレータMG1,MG2の損失LosMG1,LosMG2は予め求めておくことができるから、マップデータからの検索により求めることができる。
ここで、モータ/ジェネレータMG1,MG2の一方による発電電力および他方による消費電力が一致するダイレクト配電とは、一方のモータ/ジェネレータによる発電電力が他方のモータ/ジェネレータにより全て消費され、当該他方のモータ/ジェネレータがバッテリ電力の持ち出しなしにモータ駆動され、発電電力が一切バッテリに充電されることのない配電状態を意味するものとする。
【0058】
図5のハイブリッドコントローラ21は、図6の処理により以上のごとくにそれぞれ求めた目標エンジントルクtTe、第1(入力側)モータ/ジェネレータ目標トルクtTm1、および第2(出力側)モータ/ジェネレータ目標トルクtTm2をエンジンコントローラ22およびモータコントローラ23に供給し、エンジンENGおよび第1(入力側)モータ/ジェネレータMG1並びに第2(出力側)モータ/ジェネレータMG2をそれぞれ、上記対応する目標トルクが実現されるよう制御することにより図6の目標駆動トルクtTdを達成する。
【0059】
ところで本実施の形態によれば、第1(入力側)モータ/ジェネレータMG1の目標トルクtTm1は、(5)式の回転バランス式により求めた第1(入力側)モータ/ジェネレータMG1の目標回転数tNm1に実回転数Nm1を一致させるようなフィードバック制御により求め、他方の第2(出力側)モータ/ジェネレータMG2の目標トルクtTm2は両モータ/ジェネレータの発電電力および消費電力が相互に一致するダイレクト配電となるのに必要なトルクとするから、
両モータ/ジェネレータMG1,MG2の目標トルクtTm1,tTm2を共線図上のトルクバランス式から求めないこととなって、これらモータ/ジェネレータ目標トルクtTm1,tTm2に従来のごとくエンジントルクTeや変速機出力トルクToが関与しないこととなる。
【0060】
従って、目標値tTeに対して大きな応答遅れを持つエンジントルクTeや、モータ/ジェネレータ目標トルクtTm1,tTm2に大きく関与する変速機出力トルクToの影響を排除しつつモータ/ジェネレータ目標トルクtTm1,tTm2を求めることができ、たとえ目標駆動力が変化している過渡期においてもエンジントルクの大きな応答遅れや変速機出力トルクに大きく影響されることなくエンジン回転数Neを、図10に円で囲んで示すように破線図示の目標値にほぼ一致させ得る。
このため本実施の形態によれば、エンジントルクの応答遅れによりエンジン回転数が目標値から大きく外れて生ずるパーワーバランスのずれに伴うバッテリへの充放電を同図に円で囲んで示すように抑制することができ、バッテリの寿命低下に関する従来の前記問題を解消し得る。
【0061】
また、特に本実施の形態によれば、エンジンに近い入力側モータ/ジェネレータMG1の実回転数Nm1が目標回転数tNm1に一致するようなフィードバック制御により入力側モータ/ジェネレータの目標トルクtTm1を求めるから、エンジンの実回転数を一層確実に目標回転数に一致させる制御となって、エンジンを最適燃費制御する本実施の形態においてその制御意図を更に確実なものにすることができる。
【0062】
また、第1(入力側)モータ/ジェネレータ目標トルク演算部36でモータ/ジェネレータMG1の目標トルクtTm1を求めるに際し、当該モータ/ジェネレータの実回転数Nm1を目標値tNm1に一致させる回転数フィードバック制御により当該目標トルクtTm1を求めるようにしたから、目標トルクtTm1を求めるときの回転数モニタ制御を簡便で制御精度の高いものにすることができる。
【0063】
更に原動機動作点決定部34が、目標エンジン(原動機)出力tPeを図7につき前述したごとく最低燃費で発生させるエンジン回転数tNeおよびエンジントルクtTeの組み合わせを目標エンジン回転数および目標エンジントルクとしてエンジン動作点となすものであることから、目標エンジン(原動機)出力tPeを最適燃費制御により最も燃費の良い動作点で発生させることができる。
【0064】
図8は、本発明の他の実施の形態を示し、本実施の形態においては回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータを、上記した実施の形態とは逆に、第2(出力側)モータ/ジェネレータMG2とする。
これがため、図6の第1(入力側)モータ/ジェネレータ目標回転数演算部35に代えて第2(出力側)モータ/ジェネレータ目標回転数演算部45を設け、第1(入力側)モータ/ジェネレータ目標トルク演算部36に代えて第2(出力側)モータ/ジェネレータ目標トルク演算部46を設け、第2(出力側)モータ/ジェネレータ目標トルク演算部37に代えて第1(入力側)モータ/ジェネレータ目標トルク演算部47を設ける。
【0065】
第2(出力側)モータ/ジェネレータ目標回転数演算部45は、車輪駆動軸回転数Ndにファイナルギヤ比Gfを掛けて求め得る変速機出力回転数No、および目標エンジン回転数tNeから、図2および図3の共線図上において出力Outに近い側における第2(出力側)モータ/ジェネレータMG2の目標回転数tNm2を、前記(2)式に対応する次の回転バランス式
tNm2=(1+β)No−β・tNe・・・(8)
の演算により求める。
【0066】
第2(出力側)モータ/ジェネレータ目標トルク演算部46は、第2(出力側)モータ/ジェネレータMG2の目標回転数tNm2および当該モータ/ジェネレータの実回転数Nm2を入力され、実回転数Nm2をフィードバックゲインKgで目標回転数tNm2に一致させるための当該モータ/ジェネレータMG2の目標トルクtTm2を以下のフィードバック演算により求める。
tTm2=Kg(tNm2−Nm2) ・・・(9)
【0067】
第1(入力側)モータ/ジェネレータ目標トルク演算部47は、両モータ/ジェネレータMG1,MG2の実回転数Nm1,Nm2および上記出力側モータ/ジェネレータ目標トルクtTm2と、インバータ24(図1参照)等による両モータ/ジェネレータMG1,MG2の損失LosMG1,LosMG2から、モータ/ジェネレータMG1,MG2の一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な第1(入力側)モータ/ジェネレータの目標トルクtTm1を次式により求める。
tTm1=−(tTm2×Nm2+LosMG1+LosMG2)/Nm1 ・・・(10)
【0068】
以上のごとくに求められた目標エンジントルクtTe、第1(入力側)モータ/ジェネレータ目標トルクtTm1、および第2(出力側)モータ/ジェネレータ目標トルクtTm2はそれぞれ、エンジンENGおよび第1(入力側)モータ/ジェネレータMG1並びに第2(出力側)モータ/ジェネレータMG2の制御に供され、図8の目標駆動トルクtTdを達成するが、
本実施の形態においても、第2(出力側)モータ/ジェネレータMG2の目標トルクtTm2は、(8)式の回転バランス式により求めた第2(出力側)モータ/ジェネレータMG2の目標回転数tNm2に実回転数Nm2を一致させるようなフィードバック制御により求め、第1(入力側)モータ/ジェネレータMG1の目標トルクtTm1は両モータ/ジェネレータの発電電力および消費電力が相互に一致するダイレクト配電となるのに必要なトルクとするから、
前記した実施の形態におけると同様の作用効果を達成することができ、エンジントルクの応答遅れによりエンジン回転数が目標値から大きく外れて生ずるパーワーバランスのずれに伴うバッテリへの充放電を抑制してバッテリ寿命の低下に関する従来の前記問題を解消し得る。
【0069】
図9は、本発明の更に他の実施の形態になる変速制御装置を示し、本実施の形態においては、回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータを、図6におけるように第1(入力側)モータ/ジェネレータMG1にするか、図8におけるように第2(出力側)モータ/ジェネレータMG2とするかを、モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2に応じ自動的に切り替えるようにしたものである。
【0070】
これがため本実施の形態においては、図6におけると同様な第1(入力側)モータ/ジェネレータ目標回転数演算部35および図8におけると同様な第2(出力側)モータ/ジェネレータ目標回転数演算部45の双方を設ける。
また、図6における第1(入力側)モータ/ジェネレータ目標トルク演算部36および第2(出力側)モータ/ジェネレータ目標トルク演算部37と同様な演算を行って第1(入力側)モータ/ジェネレータ目標トルクtTm1aおよび第2(出力側)モータ/ジェネレータ目標トルクtTm2aをそれぞれ求める第1(入力側)モータ/ジェネレータ目標トルクフィードバック演算部36aおよびダイレクト配電用第2(出力側)モータ/ジェネレータ目標トルク演算部37aを設ける。
更に、図8における第2(出力側)モータ/ジェネレータ目標トルク演算部46および第1(入力側)モータ/ジェネレータ目標トルク演算部47と同様な演算を行って第2(出力側)モータ/ジェネレータ目標トルクtTm2bおよび第1(入力側)モータ/ジェネレータ目標トルクtTm1bをそれぞれ求める第2(出力側)モータ/ジェネレータ目標トルクフィードバック演算部46bおよびダイレクト配電用第1(入力側)モータ/ジェネレータ目標トルク演算部47bを設ける。
【0071】
本実施の形態においては更に、モータ/ジェネレータ目標トルク選択部51を設け、この選択部51は、両モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2をもとに、これら回転数の絶対値が低い方のモータ/ジェネレータの実回転数を目標回転数に一致させるようなフィードバック制御により当該モータ/ジェネレータの目標トルクを求め、他方のモータ/ジェネレータの目標トルクをダイレクト配電により求める。
つまり選択部51は、モータ/ジェネレータMG1の回転数Nm1の絶対値がモータ/ジェネレータMG2の回転数Nm2の絶対値よりも小さい場合、演算部36a,37aで求めた第1(入力側)モータ/ジェネレータ目標トルクtTm1aおよび第2(出力側)モータ/ジェネレータ目標トルクtTm2aをそれぞれ第1(入力側)モータ/ジェネレータ目標トルクtTm1および第2(出力側)モータ/ジェネレータ目標トルクtTm2と定め、逆に、モータ/ジェネレータMG2の回転数Nm2の絶対値がモータ/ジェネレータMG1の回転数Nm1の絶対値よりも小さい場合、演算部46b,47bで求めた第2(出力側)モータ/ジェネレータ目標トルクtTm2bおよび第1(入力側)モータ/ジェネレータ目標トルクtTm1bをそれぞれ第2(出力側)モータ/ジェネレータ目標トルクtTm2および第1(入力側)モータ/ジェネレータ目標トルクtTm1と定める。
【0072】
かかる構成によれば、両モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2のうち絶対値が低い方のモータ/ジェネレータの実回転数を目標回転数に一致させるようなフィードバック制御により当該モータ/ジェネレータの目標トルクを求め、他方のモータ/ジェネレータの目標トルクはダイレクト配電により求めることから、
前記各実施の形態におけると同様な作用効果を奏し得るのに加えて、ダイレクト配電により一方のモータ/ジェネレータの回転数が0になる可能性を排除して、両モータ/ジェネレータの発電電力と消費電力とが一致してバッテリに対する充放電を抑制する効果を全回転領域で補償することができる。
【0073】
ここで、モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2のうち絶対値が低い方のモータ/ジェネレータの実回転数を目標回転数に一致させるようなフィードバック制御により当該モータ/ジェネレータの目標トルクを求めるのが良い理由は、前記のようなパワーバランス方式に目標トルクを求めるとトルクの大きさがモータ/ジェネレータの回転数比が支配的になり、また出力側モータ/ジェネレータMG2が負回転になることが多いため、回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータを適切に選ばないと目標回転数を実現できない場合があるからである。
【0074】
図2および図3の共線図に関連して以下に補足説明する。回転数Nm1が正、回転数Nm2が負である場合(例えばアイドル状態)を考えると、バッテリの充放電がないようにトルク制御を行うためには、モータ/ジェネレータMG1,MG2のトルクTm1,Tm2が共に正(図の上向きで、モータ/ジェネレータMG1は放電、モータ/ジェネレータMG2は充電)または負(図の下向きで、モータ/ジェネレータMG1が発電、モータ/ジェネレータMG2が放電)になる必要がある。
一方、出力(Out)上の駆動力が正(図の下向き)状態を維持するためには、モータ/ジェネレータMG1,MG2のトルクTm1,Tm2が共に正(図の上向き)である必要がある。
【0075】
モータ/ジェネレータ目標トルクを回転数フィードバック制御により求める場合においてモータ/ジェネレータMG1,MG2のトルクTm1,Tm2が共に正になるためには、目標となる回転状態が同じだとすると(車速が0で、アイドル運転相当)、実回転状態は回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータに応じて異なる。
しかし、どちらの場合も回転数フィードバック制御により目標トルクを求めていない側のモータ/ジェネレータのバランストルクは目標回転数となるためのトルクと異なる方向となる。
簡単のためモータ/ジェネレータの損失を0とした場合、バッテリの充放電がない状態のモータ/ジェネレータMG1,MG2のトルクTm1,Tm2は(Tm1×Nm1=Tm2×Nm2)から明らかなように回転数Nm1,Nm2と反比例する。
【0076】
そのため、回転数Nm1,Nm2のうち絶対値が大きい方のモータ/ジェネレータで回転数フィードバック制御した場合、バランストルクは回転数フィードバック制御で得られたトルクより大きな絶対値を持つ。
このような状態になると共線図上のレバーが回転数の目標とは異なる方向に動いてしまう。
その結果、フィードバックトルクは一層大きな値を持つようになり、安定した状態を保つことができない。
【0077】
同様な不安定な状態は、モータ/ジェネレータMG1の回転数Nm1が負である場合にも発生する。
従って、一方のモータ/ジェネレータの回転数が負である場合、回転数絶対値が小さい方のモータ/ジェネレータの目標トルクを回転数フィードバック制御により求めないと安定した状態を維持することができない。
以上のことが、モータ/ジェネレータMG1,MG2のうち回転数(Nm1,Nm2)絶対値の低い方のモータ/ジェネレータの目標トルクを回転数フィードバック制御により求める理由である。
【0078】
なお、どちらのモータ/ジェネレータの目標トルクを回転数フィードバック制御により求めるかを上記ではモータ/ジェネレータ回転数の絶対値の大小のみにより決定することとしたが、これに加えて、両モータ/ジェネレータの回転数の比に応じても決定したり、両モータ/ジェネレータの回転数の差に応じても決定したり、エンジン回転数Neと変速機出力回転数Noとの比に応じても決定したり、エンジン回転数Neと変速機出力回転数Noとの差に応じても決定するようになすのが良く、この場合、フィードバック制御によるハンチングを防止することができる。
【図面の簡単な説明】
【図1】本発明による変速制御装置を適用し得るハイブリッド変速機を例示する線図的構成図である。
【図2】同ハイブリッド変速機の回転バランス式を求めるのに用いた共線図である。
【図3】同ハイブリッド変速機のトルクバランス式を求めるのに用いた共線図である。
【図4】本発明による変速制御装置を適用可能な他の形式のハイブリッド変速機を示す線図的構成図である。
【図5】本発明によるハイブリッド変速機の変速制御システムを示すブロック線図である。
【図6】本発明の一実施の形態になる変速制御装置を示す機能別ブロック線図である。
【図7】エンジンの最適燃費線を等出力線とともに例示するエンジンの性能線図である。
【図8】本発明の他の実施の形態になる変速制御装置を示す機能別ブロック線図である。
【図9】本発明の更に他の実施の形態になる変速制御装置を示す機能別ブロック線図である。
【図10】図1に示すハイブリッド変速機を、図6に示す装置により変速制御した場合における動作タイムチャートである。
【図11】従来のハイブリッド変速機の回転数バランス式を求めるのに用いた共線図である。
【図12】同ハイブリッド変速機のトルクバランス式を求めるのに用いた共線図である。
【図13】従来の変速制御装置を図1のハイブリッド変速機に適用した場合における変速制御の動作タイムチャートである。
【符号の説明】
1 変速機ケース
2 ラビニョオ型プラネタリギヤセット(差動装置)
ENG エンジン(原動機)
4 複合電流2層モータ
MG1 第1(入力側)モータ/ジェネレータ
MG2 第2(出力側)モータ/ジェネレータ
7 シングルピニオン遊星歯車組
8 ダブルピニオン遊星歯車組
S1 サンギヤ
S2 サンギヤ
P1 ロングピニオン
P2 ショートピニオン
R リングギヤ
C キャリア
21 ハイブリッドコントローラ
22 エンジンコントローラ
23 モータコントローラ
24 インバータ
25 バッテリ
26 アクセル開度センサ
27 車速センサ
28 エンジン回転センサ
29 第1モータ/ジェネレータ回転センサ
30 第2モータ/ジェネレータ回転センサ
31 目標駆動トルク演算部
32 目標エンジン(原動機)出力演算部
34 エンジン(原動機)動作点決定部
35 第1(入力側)モータ/ジェネレータ目標回転数演算部
36 第1(入力側)モータ/ジェネレータ目標トルク演算部
37 第2(出力側)モータ/ジェネレータ目標トルク演算部
45 第2(出力側)モータ/ジェネレータ目標回転数演算部
46 第2(出力側)モータ/ジェネレータ目標トルク演算部
47 第1(入力側)モータ/ジェネレータ目標トルク演算部
36a 第1(入力側)モータ/ジェネレータ目標トルクフィードバック演算部
37a ダイレクト配電用第2(出力側)モータ/ジェネレータ目標トルク演算部
46b 第2(出力側)モータ/ジェネレータ目標トルクフィードバック演算部
47b ダイレクト配電用第1(入力側)モータ/ジェネレータ目標トルク演算部
51 モータ/ジェネレータ目標トルク選択部
【発明の属する技術分野】
本発明は、エンジン等の原動機とモータ/ジェネレータとを搭載したハイブリッド車両に有用なハイブリッド変速機、特に、これら原動機とモータ/ジェネレータとの間における差動装置により無段変速動作を行わせることが可能なハイブリッド変速機の変速制御装置に関するものである。
【0002】
【従来の技術】
ハイブリッド変速機としては一般的に、シリーズ式と、パラレル式と、両者を組み合わせたシリーズ式+パラレル式の3方式のものが知られているが、いずれもエンジン回転エネルギーの全部または一部を発電機により一旦電気エネルギーに変換し、この電気エネルギーとバッテリからの電力とで車両駆動系に結合されたモータを駆動して車両の走行を行わせ、余剰な電気エネルギーをバッテリに蓄電するのが普通である。
そして、エンジン動作点を最適燃費が実現されるよう定めてバッテリへの充放電をタイミング良く行わせることにより、運転状態に応じた要求駆動力を良好な燃費のもとで発生させ得るものである。
【0003】
従来のハイブリッド変速機の変速制御装置を、特開平9−308012号公報に記載されたシリーズ式+パラレル式のハイブリッド変速機用の変速制御装置について以下に説明する。
この種ハイブリッド変速機は、サンギヤ、リングギヤおよびキャリアよりなる単純遊星歯車組で前記の差動装置を構成し、キャリアに入力軸からのエンジン回転を入力する。
キャリアへの回転は、一方でサンギヤを経てジェネレータ(発電機)に伝達し、他方でリングギヤを経て車輪に伝達するようになし、リングギヤにはモータを結合してこれからの回転をも車輪に伝達するように構成する。
【0004】
上記の構成を共線図により示すと図11および図12に示すごとくに表され、差動装置が、単純遊星歯車組で構成された3要素、2自由度の差動装置であるため、車輪駆動系を結合される出力(Out)要素としてのリングギヤRに上記のモータを直結し、エンジン(ENG)が結合された入力要素としてのキャリアCを挟んで出力Outと反対の側に位置するサンギヤSに上記のジェネレータを結合することとなる。
【0005】
図11および図12に示す共線図において、横軸は遊星歯車組のギヤ比により決まる回転メンバ間の距離比、つまりサンギヤSおよびキャリアC間の距離を1とした時のサンギヤSおよびリングギヤR間の距離の比をσで示すものである。
【0006】
図11の縦軸は、各回転メンバの回転速度、つまりキャリアCへのエンジン回転数Ne、サンギヤS(ジェネレータ)の回転数N1、およびリングギヤR(モータ)からの出力(Out)回転数Noを示し、2個の回転メンバの回転速度が決まれば他の1個の回転メンバの回転速度が決まる。
図11において回転バランス式は、(N1−No)(Ne−No)=(1+σ)σで表され、サンギヤS(ジェネレータ)の回転数N1は、次式により求めることができる。
N1=No+(Ne−No)(1+σ)/σ
【0007】
図12の縦軸は、各回転メンバに働くエンジントルクTe、ジェネレータトルクT1、出力トルクTo、およびモータトルクT2を示し、各回転メンバに結合された回転系のイナーシャを質量と見なし、それぞれに作用する上記のエンジントルクTe、ジェネレータトルクT1、出力トルクTo、およびモータトルクT2に応じて各回転メンバの回転速度は変化する。
ここで、キャリアCに結合した入力回転系はエンジンENGが存在するためその回転イナーシャが大きく、またリングギヤRに結合した出力(Out)回転系も車輪やディファレンシャルギヤ装置などが存在するためその回転イナーシャが大きいことから、共線図上におけるレバー重心Gは図12に示すごとく、イナーシャが大きなキャリアC(エンジンENG)およびリングギヤR(出力Out)間に位置し、この位置を以下ではサンギヤSからの距離Xgcとして示す。
【0008】
定常状態を維持(車速一定で目標駆動トルクを実現)するためには、各回転メンバに働くトルクによる重心G周りの並進運動γおよび回転運動δが共に0であることである。
つまり並進運動γについては、T1+Te+(To+T2)=0が成立し、また回転運動δについては、T1×Xgc+Te(Xgc−1)=(To+T2)(1+σ−Xgc)が成立することである。
これら2式を解いてトルクバランス式は次式で表される。
T1=−Te{σ/(1+σ)}
T2=−To−Te{1/(1+σ)}
【0009】
上記文献に記載されたハイブリッド変速機の変速制御装置にあっては、ジェネレータおよびモータのトルクT1,T2を、概ね以下のようにして決定する。
(1)エンジンのアクセル操作量から車輪の目標駆動トルクToを決定する。
(2)この目標駆動トルクToおよび出力回転No(車速)から目標出力Poを求める。
(3)目標出力Poを発生させる目標エンジン回転数Neおよび目標エンジントルクTeの組み合わせ(例えば最適燃費となる組み合わせ)を決定する。
(4)目標エンジントルクTeおよび目標駆動トルクToを用いて前記のトルクバランス式の演算によりT1,T2を算出する。
(5)目標出力Poが一定になって安定したら、ジェネレータの実回転数が前記回転バランス式から求めた目標回転数N1に一致するようジェネレータのトルクT1をフィードバック制御する。
【0010】
【発明が解決しようとする課題】
ところで、バッテリは周辺の使用環境温度が低下すると急激に性能が低下することが知られており、例えば−30℃のような極低温になると許容可能な充放電量が通常時の数分の一程度まで落ち込むことがある。
そして、許容可能な充放電量を越えた充放電が行われるとバッテリが許容範囲を超えた電圧降下を生じてしまい、劣化が急速に進んで使用寿命を著しく短縮する。
このためハイブリッド変速機にあっては、バッテリへの充放電を制限しながら目標駆動力を実現する変速制御方式が肝要である。
【0011】
しかし実際には、エンジントルクTeがその目標値とずれるのを免れず、そのずれ分が前記の式に入り込んでエネルギーのアンバランスを生じさせ、当該アンバランスをバッテリ電力により解消する必要があることから、前記したジェネレータおよびモータの発電電力および消費電力を一致させてバッテリの充放電を0にすることは従来の変速制御による限り困難であった。
この傾向は、アクセル操作などで目標駆動トルクが変化している間の過渡期において顕著になる。
【0012】
特に、複数の遊星歯車組を組み合わせて差動装置を構成した場合のように、共線図上に配置される回転メンバとして4個以上の回転メンバが存在する2自由度の差動装置を用いる場合は、回転メンバ数の増加によりトルク制御個数が増えて回転メンバ間のトルクの関係が複雑になり、また後記するごとく前記ジェネレータおよびモータの目標トルクにエンジントルクだけでなく変速機出力トルクも関与することから、前記した従来の制御手法ではバッテリの充放電を抑えつつ目標駆動力を実現することが至難の業である。
【0013】
ハイブリッド変速機を図1のような差動装置を用いて構成した場合につき詳述するに、この変速機はエンジンENGに近い前側に設けた差動装置を成すラビニョオ型プラネタリギヤセット2と、また反対の後側に設けたモータ/ジェネレータMG1,MG2を提供する複合電流2層モータ4とで構成する。
ラビニョオ型プラネタリギヤセット2は、ピニオンP1およびリングギヤRを共有するシングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8の組み合わせになり、シングルピニオン遊星歯車組7はサンギヤS2およびリングギヤRにそれぞれピニオンP1を噛合させた構造とし、ダブルピニオン遊星歯車組8はサンギヤS1および共有ピニオンP1の他に大径ピニオンP2を具え、大径ピニオンP2をサンギヤS1および共有ピニオンP1に噛合させた構造とする。
そして遊星歯車組7,8のピニオンP1,P2を全て、共通なキャリアCにより回転自在に支持する。
【0014】
以上の構成になるラビニョオ型プラネタリギヤセット2は、サンギヤS1、サンギヤS2、リングギヤRおよびキャリアCの4個の回転メンバを主たる要素とし、これら回転メンバの回転速度順はサンギヤS1、リングギヤR、キャリアC、サンギヤS2の順番であり、共線図は図2および図3のように表される。
図1における複合電流2層モータ4は、内側ロータ4riと、これを包囲する環状の外側ロータ4roと、これらロータ間における環状ステータ4sとを具え、環状ステータ4sと内側ロータ4riとで内側の第1モータ/ジェネレータMG1を構成し、環状ステータ4sと外側ロータ4roとで外側の第2モータ/ジェネレータMG2を構成する。
【0015】
図2および図3の共線図にも示したが、図1のごとくサンギヤS1にモータ/ジェネレータMG1(内側ロータ4ri)を結合し、リングギヤRにエンジンENGを結合し、キャリアCに車輪駆動系(ディファレンシャルギヤ装置6等)への出力(Out)を結合し、サンギヤS2にモータ/ジェネレータMG2(外側ロータ4ro)を結合する。
モータ/ジェネレータMG1は図2および図3の共線図上においてエンジンENGに近い側にあり、従って以下では、モータ/ジェネレータMG1を入力側モータ/ジェネレータとも称し、モータ/ジェネレータMG2は図2および図3の共線図上において車輪駆動系への出力(Out)に近い側にあり、従って以下では、モータ/ジェネレータMG2を出力側モータ/ジェネレータとも称する。
【0016】
図2および図3の横軸は遊星歯車組7,8のギヤ比により決まる回転メンバ間の距離比、つまりリングギヤRおよびキャリアC間の距離を1とした時のサンギヤS1およびリングギヤR間の距離の比をαで示し、キャリアCおよびサンギヤS2間の距離をβで示したものである。
【0017】
また図2の縦軸は、各回転メンバの回転速度、つまりリングギヤRへのエンジン回転数Ne、サンギヤS1(モータ/ジェネレータMG1)の回転数Nm1、キャリアCからの出力(Out)回転数No、およびサンギヤS2(モータ/ジェネレータMG2)の回転数Nm2を示し、2個の回転メンバの回転速度が決まれば他の2個の回転メンバの回転速度が決まる。
図2において回転バランス式は、(Nm1−No):(Ne−No)=(1+α):1および(Ne−Nm2):(Ne−No)=(1+β):1で表され、モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2はそれぞれ、エンジン回転数Neおよび出力回転数Noから次式により求めることができる。
Nm1=(1+α)Ne−α・No・・・(1)
Nm2=(1+β)No−β・Ne・・・(2)
【0018】
図3の縦軸は、各回転メンバに働くエンジントルクTe、モータ/ジェネレータMG1,MG2のトルクTm1,Tm2、および出力(Out)トルクToを示す。
ここで、リングギヤRに結合した入力回転系はエンジンENGが存在するためその回転イナーシャが大きく、またキャリアCに結合した出力(Out)回転系も車輪やディファレンシャルギヤ装置などが存在するためその回転イナーシャが大きいことから、共線図上におけるレバー重心Gは図3に示すごとく、イナーシャが大きなリングギヤR(エンジンENG)およびキャリアC(出力Out)間に位置し、この位置を以下ではサンギヤS1からの距離Xgcとして示す。
【0019】
定常状態を維持(車速一定で目標駆動トルクを実現)するためには、4個の回転メンバに働くトルクによる重心G周りの並進運動γおよび回転運動δが共に0であることである。
つまり並進運動γについては、Tm1+Te+(To+Tm2)=0が成立し、また回転運動δについては、Tm1×Xgc+Te(Xgc−α)=To(α+1−Xgc)+T2(α+1+β−Xgc)が成立することである。
これら2式を解いてトルクバランス式は次式で表される。
Tm1=−{β・To+(1+β)Te}(α+1+β)・・・(3)
Tm2=−{(1+α)To+α・Te}(α+1+β)・・・(4)
これら(3),(4)式と、図15に示すトルクT1,T2に関連して前記したトルクバランス式との比較から明らかなように、共線図上の回転メンバが4個存在する差動装置を用いたハイブリッド変速機の場合は、Tm1の項にエンジントルクTeだけでなく出力トルクToも関与する。
【0020】
ここで当該ハイブリッド変速機を、前記した文献に記載の変速制御装置と同様な手順(1)〜(5)で変速制御した場合の作用を説明する。
運転者によるアクセル操作で目標駆動トルクToが変化すると、これに応じて変化する目標出力Poを発生させる目標エンジン回転数Neおよび目標エンジントルクTeの組み合わせが決定され、この目標エンジントルクTeおよび目標駆動トルクToを用いて上記(3)式および(4)のようなトルクバランス式の演算によりモータ/ジェネレータ目標トルクTm1,Tm2を決定することになる。
【0021】
ところで、エンジンのトルクに関する目標値からの応答遅れはモータ/ジェネレータのそれに較べて遥かに大きく、またその制御精度も低くて、且つ環境条件や個体差の影響も受け易い。
そのため、モータ/ジェネレータMG1,MG2はそれぞれ大きな応答遅れなしに上記の演算値である目標トルクTm1,Tm2を実現できるのに、エンジンが過渡時において前記の目標トルクTeを達成することができない。
また、(3)式から明らかなようにモータ/ジェネレータ目標トルクTm1に目標駆動トルクToが関与するためトルク変化が大きい上に、モータ/ジェネレータ目標トルクTm2も出力(Out)から離れた結合されるため全体のトルクバランスに(特に重心G周りに回転運動に)与える影響が大きい。
【0022】
そのため特に、共線図上に4個以上の回転メンバが存在する型式のハイブリッド変速機に前記従来の変速制御方式をそのまま適用すると、トルクバランスを取ることができなく、図13に示すごとくアクセル踏み込み瞬時t1の直後の過渡期において各回転メンバの目標トルクは概ね実現されるものの、特に円で囲んで示す箇所においてエンジンの実線で示す実回転数が破線で示す目標値と大きく乖離し、これに伴うパワーバランスのずれを、同じく円で囲んで示すごとくバッテリへの充放電により補償する必要が生ずる。
かかるバッテリへの充放電は、特に極低温時において許容範囲を超えることが多く、バッテリの劣化を早めることになる。
【0023】
本発明は、上記の問題が両モータ/ジェネレータの目標トルクを共線図上のトルクバランス式から求めてそれぞれのトルク制御に供するためであるとの事実認識に基づき、
一方のモータ/ジェネレータの目標トルクは、対応する前記の回転バランス式により求めた当該モータ/ジェネレータの目標回転数に実回転数を一致させるような例えばフィードバック制御により求め、他方のモータ/ジェネレータの目標トルクは両モータ/ジェネレータによる発電電力および消費電力が一致するダイレクト配電となるのに必要なトルクを目標トルクとする構成となし、これにより、
目標駆動力が変化している過渡期においてもエンジントルクの大きな応答遅れや変速機出力トルクに大きく影響されることなく回転メンバの回転数を目標値にほぼ一致させることができるようにすることで、パーワーバランスのずれに伴うバッテリへの充放電を抑制し得るようにしてその寿命低下に関する問題を解消した変速制御が可能なハイブリッド変速機の変速制御装置を提供することを目的とする。
【0024】
【課題を解決するための手段】
この目的のため本発明によるハイブリッド変速機の変速制御装置は、請求項1に記載のごとくに構成する。
つまり、共線図上に4個以上の回転メンバが存在する2自由度の差動装置を具え、共線図上の内側に位置する2個の内側回転メンバにそれぞれ原動機からの入力および駆動系への出力を結合し、共線図上の外側に位置する2個の外側回転メンバにそれぞれ2個のモータ/ジェネレータを結合したハイブリッド変速機を前提とし、
これに対し目標原動機出力演算手段と、原動機動作点決定手段と、入力側モータ/ジェネレータ目標回転数演算手段と、入力側モータ/ジェネレータ目標トルク演算手段と、出力側モータ/ジェネレータ目標トルク演算手段とを設ける。
【0025】
目標原動機出力演算手段は、アクセル操作量から求めた目標駆動トルクと車速とから目標原動機出力を演算し、原動機動作点決定手段は、目標原動機出力を発生させるための目標原動機回転数および目標原動機トルクの組み合わせを決定する。
入力側モータ/ジェネレータ目標回転数演算手段は、目標原動機回転数および車速から共線図上の回転バランス式を解いて、入力側モータ/ジェネレータの目標回転数を求め、入力側モータ/ジェネレータ目標トルク演算手段は、入力側モータ/ジェネレータの実回転数を入力側モータ/ジェネレータ目標回転数に一致させるための入力側モータ/ジェネレータの目標トルクを求める。
そして出力側モータ/ジェネレータ目標トルク演算手段は、両モータ/ジェネレータの実回転数および入力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な出力側モータ/ジェネレータの目標トルクを求める。
そして変速制御装置は、原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、上記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクを達成する。
【0026】
また同じ目的のため本発明によるハイブリッド変速機の変速制御装置は、請求項3に記載のごとくに構成することができる。
つまり、請求項1に記載の場合と同じハイブリッド変速機に対し、目標原動機出力演算手段と、原動機動作点決定手段と、出力側モータ/ジェネレータ目標回転数演算手段と、出力側モータ/ジェネレータ目標トルク演算手段と、入力側モータ/ジェネレータ目標トルク演算手段とを設ける。
目標原動機出力演算手段および原動機動作点決定手段は請求項1におけると同じもので、
出力側モータ/ジェネレータ目標回転数演算手段は、前記目標原動機回転数および車速から共線図上の回転バランス式を解いて、出力側モータ/ジェネレータの目標回転数を求め、出力側モータ/ジェネレータ目標トルク演算手段は、出力側モータ/ジェネレータの実回転数を出力側モータ/ジェネレータ目標回転数に一致させるための出力側モータ/ジェネレータの目標トルクを求める。
【0027】
入力側モータ/ジェネレータ目標トルク演算手段は、両モータ/ジェネレータの実回転数および出力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な入力側モータ/ジェネレータの目標トルクを求める。
そして変速制御装置は、原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、前記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクを達成する。
【0028】
更に同じ目的のため本発明によるハイブリッド変速機の変速制御装置は、請求項5に記載のごとくに構成することができる。
つまり、請求項1,3に記載の場合と同じハイブリッド変速機に対し、目標原動機出力演算手段と、原動機動作点決定手段と、入力側モータ/ジェネレータ目標回転数演算手段と、入力側モータ/ジェネレータ目標トルクフィードバック演算手段と、ダイレクト配電用出力側モータ/ジェネレータ目標トルク演算手段と、出力側モータ/ジェネレータ目標回転数演算手段と、出力側モータ/ジェネレータ目標トルクフィードバック演算手段と、ダイレクト配電用入力側モータ/ジェネレータ目標トルク演算手段と、モータ/ジェネレータ目標トルク選択手段とを設ける。
【0029】
目標原動機出力演算手段および原動機動作点決定手段は請求項1,3に記載のものと同じもので、入力側モータ/ジェネレータ目標回転数演算手段は請求項1に記載のものと同じもので、出力側モータ/ジェネレータ目標回転数演算手段は請求項3に記載のものと同じものである。
入力側モータ/ジェネレータ目標トルクフィードバック演算手段は、入力側モータ/ジェネレータの実回転数を前記入力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により入力側モータ/ジェネレータの目標トルクを求め、
ダイレクト配電用出力側モータ/ジェネレータ目標トルク演算手段は、前記両モータ/ジェネレータの実回転数および前記フィードバック制御により求めた入力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な出力側モータ/ジェネレータの目標トルクを求める。
【0030】
出力側モータ/ジェネレータ目標トルクフィードバック演算手段は、出力側モータ/ジェネレータの実回転数を前記出力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により出力側モータ/ジェネレータの目標トルクを求め、
ダイレクト配電用入力側モータ/ジェネレータ目標トルク演算手段は、前記両モータ/ジェネレータの実回転数および前記フィードバック制御により求めた出力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な入力側モータ/ジェネレータの目標トルクを求める。
【0031】
モータ/ジェネレータ目標トルク選択手段は、前記両モータ/ジェネレータのうち回転数絶対値が低い方のモータ/ジェネレータに係わる目標トルクを前記フィードバック制御による目標トルクとし、他方のモータ/ジェネレータの目標トルクをダイレクト配電用の目標トルクとする。
そして変速制御装置は、原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、前記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクを達成する。
【0032】
【発明の効果】
これら請求項1,3,5に記載された本発明の構成によれば、一方のモータ/ジェネレータの目標トルクは、対応する前記の回転バランス式により求めた当該モータ/ジェネレータの目標回転数に実回転数を一致させるような(請求項3ではフィードバック制御)により求め、他方のモータ/ジェネレータの目標トルクは両モータ/ジェネレータによる発電電力および消費電力が相互に一致するダイレクト配電となるのに必要なトルクとするから、
両モータ/ジェネレータの目標トルクを共線図上のトルクバランス式から求めないこととなって、これらモータ/ジェネレータ目標トルクに原動機出力トルクや変速機出力トルクが関与しないこととなる。
【0033】
従って、目標値に対して大きな応答遅れを持つ原動機出力トルクや、モータ/ジェネレータ目標トルクに大きく関与する変速機出力トルクの影響を排除しつつモータ/ジェネレータ目標をトルク求めることができ、たとえ目標駆動力が変化している過渡期においても原動機出力トルクの大きな応答遅れや変速機出力トルクに大きく影響されることなく回転メンバの回転数を目標値にほぼ一致させ得る。
このため本発明によれば、原動機出力トルクの応答遅れにより回転メンバの回転数が目標値から大きく外れて生ずるパーワーバランスのずれに伴うバッテリへの充放電を抑制することができ、バッテリの寿命低下に関する従来の前記問題を解消し得る。
【0034】
また、特に請求項1に記載の発明によれば、原動機に近い入力側モータ/ジェネレータの実回転数が目標回転数に一致するように(例えばフィードバック制御により)入力側モータ/ジェネレータの目標トルクを求めるから、原動機の実回転数を一層確実に目標回転数に一致させる制御となって、原動機を最適燃費制御する時などにおいてその制御意図を更に確実なものにすることができる。
【0035】
更に、特に請求項5に記載の発明によれば、両モータ/ジェネレータのうち回転数絶対値の低い方のモータ/ジェネレータの実回転数が目標回転数に一致するようフィードバック制御により当該モータ/ジェネレータの目標トルクを求め、他方のモータ/ジェネレータの目標トルクをダイレクト配電により求めたから、ダイレクト配電により一方のモータ/ジェネレータの回転数が0になる可能性を排除して、両モータ/ジェネレータの発電電力と消費電力とが一致してバッテリに対する充放電を抑制する効果を全回転領域で補償することができる。
【0036】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づき詳細に説明する。
図1は、概略については既に前記したが、本発明の一実施の形態になる変速制御装置を適用するためのハイブリッド変速機を例示し、これを本実施の形態においては、前輪駆動車(FF車)用のトランスアクスルとして用いるのに有用な以下に詳述する構成となす。
【0037】
図において1は変速機ケースを示し、該変速機ケース1の軸線方向(図の左右方向)右側(エンジンENGに近い前側)にラビニョオ型プラネタリギヤセット2を、また図の左側(エンジンENGから遠い後側)に例えば複合電流2層モータ4を可とするモータ/ジェネレータ組を内蔵する。
これらラビニョオ型プラネタリギヤセット2および複合電流2層モータ4は変速機ケース1の主軸線上に同軸に配置するが、この主軸線からオフセットさせて平行に配置したカウンターシャフト5およびディファレンシャルギヤ装置6をも変速機ケース1内に内蔵させる。
【0038】
ラビニョオ型プラネタリギヤセット2は、ロングピニオンP1およびリングギヤRを共有するシングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8の組み合わせになり、シングルピニオン遊星歯車組7はサンギヤS2およびリングギヤRにそれぞれロングピニオンP1を噛合させた構造とし、ダブルピニオン遊星歯車組8はサンギヤS1およびロングピニオンP1の他に、大径のショートピニオンP2を備え、ショートピニオンP2をサンギヤS2およびロングピニオンP1に噛合させた構造とする。
そして遊星歯車組7,8のピニオンP1,P2を全て、共通なキャリアCにより回転自在に支持する。
【0039】
以上の構成になるラビニョオ型プラネタリギヤセット2は、サンギヤS1、サンギヤS2、リングギヤR、およびキャリアCの4個の回転メンバを主たる要素とし、これら4個の回転メンバのうち2個のメンバの回転速度を決定すると他のメンバの回転速度が決まる2自由度の差動装置を構成する。
そして4個の回転メンバの回転速度順は、サンギヤS1、リングギヤR、キャリアC、サンギヤS2の順番である。
なお本実施の形態で用いるラビニョオ型プラネタリギヤセット2は、シングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8のリングギヤ同士を結合し、キャリア同士を結合したものに等価である。
【0040】
複合電流2層モータ4は、内側ロータ4riと、これを包囲する環状の外側ロータ4roとを、変速機ケース1内に同軸に回転自在に支持して備え、これら内側ロータ4riおよび外側ロータ4ro間における環状空間に同軸に配置した環状ステ−タ4sを変速機ケース1に固設して構成する。
環状コイル4sと内側ロータ4riとで内側のモータ/ジェネレータである第1のモータ/ジェネレータMG1が構成され、環状コイル4sと外側ロータ4roとで外側のモータ/ジェネレータである第2のモータ/ジェネレータMG2が構成される。
ここでモータ/ジェネレータMG1,MG2はそれぞれ、複合電流を供給される時は供給電流に応じた個々の方向の、また供給電流に応じた個々の速度(停止を含む)の回転を出力するモータとして機能し、複合電流を供給されない時は外力による回転に応じた電力を発生する発電機として機能する。
【0041】
ラビニョオ型プラネタリギヤセット2の上記した4個の回転メンバには、回転速度順に、つまり図2および図3の共線図にも示したがサンギヤS1、リングギヤR、キャリアC、サンギヤS2の順に、第1モータ/ジェネレータMG1、原動機であるエンジンENG、ディファレンシャギヤ装置6を含む車輪駆動系への出力(Out)、第2モータ/ジェネレータMG2をそれぞれ結合する。
【0042】
この結合を図1に基づき以下に詳述するに、リングギヤRを上記の通りエンジン(ENG)回転が入力される入力要素とするため、このリングギヤRをエンジンクランクシャフト9に結合する。
サンギヤS1は中空軸13を介して第1モータ/ジェネレータMG1の内側ロータ4riに結合し、このモータ/ジェネレータMG1および中空軸13を遊嵌する軸14を介してサンギヤS2を第2モータ/ジェネレータMG2の外側ロータ4roに結合する。
【0043】
キャリアCを前記のごとく、車輪駆動系へ回転を出力する出力要素とするため、このキャリアCに中空軸15を介して出力歯車16を結合し、これをカウンターシャフト5上のカウンター歯車17に噛合させる。
カウンターシャフト5には別にファイナルドライブピニオン18を一体的に設け、これを、ディファレンシャルギヤ装置6に設けたファイナルドライブリングギヤ19に噛合させる。
変速機からの出力回転は、ファイナルドライブピニオン18およびファイナルドライブリングギヤ19により構成されるファイナルドライブギヤ組を経てディファレンシャルギヤ装置6に至り、このディファレンシャルギヤ装置により左右駆動輪20に分配されるものとする。
【0044】
上記の構成になるハイブリッド変速機は、前記した通り図2および図3に示すような共線図により表すことができ、この共線図上の回転バランス式は図2に関連して前記した(1),(2)式により表され、またトルクバランス式は図3に関連して前記した(3),(4)式により表される。
【0045】
図2および図3の共線図におけるレバーの傾き(変速比)は、変速機の入力(エンジン)回転数Neと、入力(エンジン)トルクTeとの組み合わせであるエンジン動作点(Ne,Te)、
サンギヤS1に係わるモータ/ジェネレータMG1の回転数Nm1と、トルクTm1との組み合わせであるモータ/ジェネレータ動作点(Nm1,Tm1)、
サンギヤS2に係わるモータ/ジェネレータMG2の回転数Nm2と、トルクTm2との組み合わせであるモータ/ジェネレータ動作点(Nm2,Tm2)により決まり、
これらにより出力Outの回転数No(車速)と、トルクToとの組み合わせ(No,To)が定まる。
【0046】
なお図1ではモータ/ジェネレータMG1,MG2を複合電流2層モータとして構成したが、モータ/ジェネレータMG1,MG2はこれに限られず、例えば図4に示すように、相互に径方向へオフセットさせて配置することができる。
本実施の形態においては、先ずシングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8を図1の場合とは前後逆に配置し、エンジン(ENG)回転を入力されるリングギヤRをショートピニオンP2に噛合させる。
そして、サンギヤS2に係わるモータ/ジェネレータMG2をラビニョオ型プラネタリギヤセット2に同軸に配置したロータ4roおよびステータ4soにより構成し、サンギヤS1に係わるモータ/ジェネレータMG1をラビニョオ型プラネタリギヤセット2の軸線からオフセットさせて配置したロータ4riおよびステータ4siにより構成する。
【0047】
そして、サンギヤS1に結合した駆動軸をモータ/ジェネレータMG2のロータ4roに貫通し、この駆動軸とモータ/ジェネレータMG1のロータ4riとの間をギヤ列3により駆動結合する。
かようにモータ/ジェネレータMG1, MG2を相互に径方向へオフセットさせて配置した構成によれば、両モータ/ジェネレータの配置の自由度が増す。
ラビニョオ型プラネタリギヤセット2およびモータ/ジェネレータMG1, MG2をかように構成した図4に示すハイブリッド変速機も、その共線図は図2および図3に示すように表されることは言うまでもない。
【0048】
上記したハイブリッド変速機の変速制御システムは図5に示すごとく、ハイブリッドコントローラ21を具え、このハイブリッドコントローラ21は後述する目標エンジントルク(tTe)指令をエンジンコントローラ22に供給し、エンジンコントローラ22がエンジンENGを当該目標トルク発生状態で運転させるように機能する。
【0049】
ハイブリッドコントローラ21は更に、モータ/ジェネレータMG1,MG2の目標トルク(tTm1)指令および目標トルク(tTm2)指令をそれぞれモータコントローラ23に供給し、モータコントローラ23がインバータ24およびバッテリ25によりモータ/ジェネレータMG1,MG2をそれぞれの目標トルク発生状態で動作させるように機能する。
【0050】
目標トルクtTe,tTm1,tTm2を求めるためハイブリッドコントローラ21には、アクセルペダル踏み込み量からアクセル開度APOを検出するアクセル開度センサ26からの信号と、車速VSPを検出する車速センサ27からの信号と、エンジン回転数Neを検出するエンジン回転センサ28からの信号と、第1モータ/ジェネレータMg1の回転数Nm1を検出する第1モータ/ジェネレータ回転センサ29からの信号と、第2モータ/ジェネレータMg2の回転数Nm2を検出する第2モータ/ジェネレータ回転センサ30からの信号とを入力する。
ハイブリッドコントローラ21はこれら入力情報を基に、図6にブロック線図で示す処理を行ってハイブリッド変速機の変速制御を以下のごとくに行う。
【0051】
目標駆動トルク演算部31は、センサアクセル開度APOおよび車速VSPから運転者要求している車輪の目標駆動トルクtTdを周知のマップ検索などの手法により求める。
目標エンジン(原動機)出力演算部32は、車速VSPに車輪タイヤ半径などで決まる定数Krを掛けて車輪駆動軸回転数Ndを求め、乗算器32aで車輪駆動軸回転数Ndと上記目標駆動トルクtTdとの乗算により車輪の目標駆動力tPvを算出し、これにモータ/ジェネレータMG1,MG2の損失分を加算して目標エンジン(原動機)出力tPeを求める。
なお、目標エンジン(原動機)出力tPeの算出に当たっては、モータ/ジェネレータMG1,MG2の損失分に加えて、必要に応じラビニョオ型プラネタリギヤセット2の伝動ロス分をも加算することができる。
【0052】
エンジン(原動機)動作点決定部34は、目標エンジン(原動機)出力tPeを発生させるための目標エンジン(原動機)トルクtTeおよび目標エンジン(原動機)回転数tNeの組み合わせとしてエンジン(原動機)動作点を決定する。
かかるエンジン動作点の決定に際し好ましくは、図7に例示するエンジン性能線図を基に目標エンジン(原動機)出力tPeを最低燃費で発生させるエンジントルクTeおよびエンジン回転数Neの組み合わせをエンジン動作点(tTe,tNe)とする最適燃費制御を用いるのが良い。
【0053】
図7は、エンジン出力ごとにこれを発生するエンジントルクTeおよびエンジン回転数Neの組み合わせを等馬力線として示し、各等馬力線上にあって対応するエンジン出力を最低燃費で発生させるエンジントルクTeおよびエンジン回転数Neの組み合わせをA,B点により示し、各等馬力線上の最低燃費点A,Bを結ぶ線を最適燃費線として示す。
図7を基に最適燃費制御によりエンジン動作点(tTe,tNe)を求めるに際しては、目標エンジン(原動機)出力tPeに対応する等馬力線と最適燃費線との交点を例えばA点のように決定し、当該点に対応するエンジントルクTeおよびエンジン回転数Neの組み合わせをエンジン動作点(tTe,tNe)と定める。
【0054】
第1(入力側)モータ/ジェネレータ目標回転数演算部35は、変速機出力回転数Noおよび目標エンジン回転数tNeから、第1(入力側)モータ/ジェネレータMG1の目標回転数tNm1を、前記(1)式に対応する次の回転バランス式
tNm1=(1+α)tNe−α・No・・・(5)
の演算により求める。
【0055】
第1(入力側)モータ/ジェネレータ目標トルク演算部36は、第1(入力側)モータ/ジェネレータMG1の目標回転数tNm1および当該モータ/ジェネレータの実回転数Nm1を入力され、実回転数Nm1をフィードバックゲインKgで目標回転数tNm1に一致させるための当該モータ/ジェネレータMG1の目標トルクtTm1を以下のフィードバック演算により求める。
tTm1=Kg(tNm1−Nm1) ・・・(6)
【0056】
第2(出力側)モータ/ジェネレータ目標トルク演算部37は、両モータ/ジェネレータMG1,MG2の実回転数Nm1,Nm2および上記入力側モータ/ジェネレータ目標トルクtTm1と、インバータ24(図1参照)等による両モータ/ジェネレータMG1,MG2の損失LosMG1,LosMG2から、モータ/ジェネレータMG1,MG2の一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な第2(出力側)モータ/ジェネレータの目標トルクtTm2を次式により求める。
tTm2=−(tTm1×Nm1+LosMG1+LosMG2)/Nm2 ・・・(7)
【0057】
なお、モータ/ジェネレータMG1,MG2の損失LosMG1,LosMG2は予め求めておくことができるから、マップデータからの検索により求めることができる。
ここで、モータ/ジェネレータMG1,MG2の一方による発電電力および他方による消費電力が一致するダイレクト配電とは、一方のモータ/ジェネレータによる発電電力が他方のモータ/ジェネレータにより全て消費され、当該他方のモータ/ジェネレータがバッテリ電力の持ち出しなしにモータ駆動され、発電電力が一切バッテリに充電されることのない配電状態を意味するものとする。
【0058】
図5のハイブリッドコントローラ21は、図6の処理により以上のごとくにそれぞれ求めた目標エンジントルクtTe、第1(入力側)モータ/ジェネレータ目標トルクtTm1、および第2(出力側)モータ/ジェネレータ目標トルクtTm2をエンジンコントローラ22およびモータコントローラ23に供給し、エンジンENGおよび第1(入力側)モータ/ジェネレータMG1並びに第2(出力側)モータ/ジェネレータMG2をそれぞれ、上記対応する目標トルクが実現されるよう制御することにより図6の目標駆動トルクtTdを達成する。
【0059】
ところで本実施の形態によれば、第1(入力側)モータ/ジェネレータMG1の目標トルクtTm1は、(5)式の回転バランス式により求めた第1(入力側)モータ/ジェネレータMG1の目標回転数tNm1に実回転数Nm1を一致させるようなフィードバック制御により求め、他方の第2(出力側)モータ/ジェネレータMG2の目標トルクtTm2は両モータ/ジェネレータの発電電力および消費電力が相互に一致するダイレクト配電となるのに必要なトルクとするから、
両モータ/ジェネレータMG1,MG2の目標トルクtTm1,tTm2を共線図上のトルクバランス式から求めないこととなって、これらモータ/ジェネレータ目標トルクtTm1,tTm2に従来のごとくエンジントルクTeや変速機出力トルクToが関与しないこととなる。
【0060】
従って、目標値tTeに対して大きな応答遅れを持つエンジントルクTeや、モータ/ジェネレータ目標トルクtTm1,tTm2に大きく関与する変速機出力トルクToの影響を排除しつつモータ/ジェネレータ目標トルクtTm1,tTm2を求めることができ、たとえ目標駆動力が変化している過渡期においてもエンジントルクの大きな応答遅れや変速機出力トルクに大きく影響されることなくエンジン回転数Neを、図10に円で囲んで示すように破線図示の目標値にほぼ一致させ得る。
このため本実施の形態によれば、エンジントルクの応答遅れによりエンジン回転数が目標値から大きく外れて生ずるパーワーバランスのずれに伴うバッテリへの充放電を同図に円で囲んで示すように抑制することができ、バッテリの寿命低下に関する従来の前記問題を解消し得る。
【0061】
また、特に本実施の形態によれば、エンジンに近い入力側モータ/ジェネレータMG1の実回転数Nm1が目標回転数tNm1に一致するようなフィードバック制御により入力側モータ/ジェネレータの目標トルクtTm1を求めるから、エンジンの実回転数を一層確実に目標回転数に一致させる制御となって、エンジンを最適燃費制御する本実施の形態においてその制御意図を更に確実なものにすることができる。
【0062】
また、第1(入力側)モータ/ジェネレータ目標トルク演算部36でモータ/ジェネレータMG1の目標トルクtTm1を求めるに際し、当該モータ/ジェネレータの実回転数Nm1を目標値tNm1に一致させる回転数フィードバック制御により当該目標トルクtTm1を求めるようにしたから、目標トルクtTm1を求めるときの回転数モニタ制御を簡便で制御精度の高いものにすることができる。
【0063】
更に原動機動作点決定部34が、目標エンジン(原動機)出力tPeを図7につき前述したごとく最低燃費で発生させるエンジン回転数tNeおよびエンジントルクtTeの組み合わせを目標エンジン回転数および目標エンジントルクとしてエンジン動作点となすものであることから、目標エンジン(原動機)出力tPeを最適燃費制御により最も燃費の良い動作点で発生させることができる。
【0064】
図8は、本発明の他の実施の形態を示し、本実施の形態においては回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータを、上記した実施の形態とは逆に、第2(出力側)モータ/ジェネレータMG2とする。
これがため、図6の第1(入力側)モータ/ジェネレータ目標回転数演算部35に代えて第2(出力側)モータ/ジェネレータ目標回転数演算部45を設け、第1(入力側)モータ/ジェネレータ目標トルク演算部36に代えて第2(出力側)モータ/ジェネレータ目標トルク演算部46を設け、第2(出力側)モータ/ジェネレータ目標トルク演算部37に代えて第1(入力側)モータ/ジェネレータ目標トルク演算部47を設ける。
【0065】
第2(出力側)モータ/ジェネレータ目標回転数演算部45は、車輪駆動軸回転数Ndにファイナルギヤ比Gfを掛けて求め得る変速機出力回転数No、および目標エンジン回転数tNeから、図2および図3の共線図上において出力Outに近い側における第2(出力側)モータ/ジェネレータMG2の目標回転数tNm2を、前記(2)式に対応する次の回転バランス式
tNm2=(1+β)No−β・tNe・・・(8)
の演算により求める。
【0066】
第2(出力側)モータ/ジェネレータ目標トルク演算部46は、第2(出力側)モータ/ジェネレータMG2の目標回転数tNm2および当該モータ/ジェネレータの実回転数Nm2を入力され、実回転数Nm2をフィードバックゲインKgで目標回転数tNm2に一致させるための当該モータ/ジェネレータMG2の目標トルクtTm2を以下のフィードバック演算により求める。
tTm2=Kg(tNm2−Nm2) ・・・(9)
【0067】
第1(入力側)モータ/ジェネレータ目標トルク演算部47は、両モータ/ジェネレータMG1,MG2の実回転数Nm1,Nm2および上記出力側モータ/ジェネレータ目標トルクtTm2と、インバータ24(図1参照)等による両モータ/ジェネレータMG1,MG2の損失LosMG1,LosMG2から、モータ/ジェネレータMG1,MG2の一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な第1(入力側)モータ/ジェネレータの目標トルクtTm1を次式により求める。
tTm1=−(tTm2×Nm2+LosMG1+LosMG2)/Nm1 ・・・(10)
【0068】
以上のごとくに求められた目標エンジントルクtTe、第1(入力側)モータ/ジェネレータ目標トルクtTm1、および第2(出力側)モータ/ジェネレータ目標トルクtTm2はそれぞれ、エンジンENGおよび第1(入力側)モータ/ジェネレータMG1並びに第2(出力側)モータ/ジェネレータMG2の制御に供され、図8の目標駆動トルクtTdを達成するが、
本実施の形態においても、第2(出力側)モータ/ジェネレータMG2の目標トルクtTm2は、(8)式の回転バランス式により求めた第2(出力側)モータ/ジェネレータMG2の目標回転数tNm2に実回転数Nm2を一致させるようなフィードバック制御により求め、第1(入力側)モータ/ジェネレータMG1の目標トルクtTm1は両モータ/ジェネレータの発電電力および消費電力が相互に一致するダイレクト配電となるのに必要なトルクとするから、
前記した実施の形態におけると同様の作用効果を達成することができ、エンジントルクの応答遅れによりエンジン回転数が目標値から大きく外れて生ずるパーワーバランスのずれに伴うバッテリへの充放電を抑制してバッテリ寿命の低下に関する従来の前記問題を解消し得る。
【0069】
図9は、本発明の更に他の実施の形態になる変速制御装置を示し、本実施の形態においては、回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータを、図6におけるように第1(入力側)モータ/ジェネレータMG1にするか、図8におけるように第2(出力側)モータ/ジェネレータMG2とするかを、モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2に応じ自動的に切り替えるようにしたものである。
【0070】
これがため本実施の形態においては、図6におけると同様な第1(入力側)モータ/ジェネレータ目標回転数演算部35および図8におけると同様な第2(出力側)モータ/ジェネレータ目標回転数演算部45の双方を設ける。
また、図6における第1(入力側)モータ/ジェネレータ目標トルク演算部36および第2(出力側)モータ/ジェネレータ目標トルク演算部37と同様な演算を行って第1(入力側)モータ/ジェネレータ目標トルクtTm1aおよび第2(出力側)モータ/ジェネレータ目標トルクtTm2aをそれぞれ求める第1(入力側)モータ/ジェネレータ目標トルクフィードバック演算部36aおよびダイレクト配電用第2(出力側)モータ/ジェネレータ目標トルク演算部37aを設ける。
更に、図8における第2(出力側)モータ/ジェネレータ目標トルク演算部46および第1(入力側)モータ/ジェネレータ目標トルク演算部47と同様な演算を行って第2(出力側)モータ/ジェネレータ目標トルクtTm2bおよび第1(入力側)モータ/ジェネレータ目標トルクtTm1bをそれぞれ求める第2(出力側)モータ/ジェネレータ目標トルクフィードバック演算部46bおよびダイレクト配電用第1(入力側)モータ/ジェネレータ目標トルク演算部47bを設ける。
【0071】
本実施の形態においては更に、モータ/ジェネレータ目標トルク選択部51を設け、この選択部51は、両モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2をもとに、これら回転数の絶対値が低い方のモータ/ジェネレータの実回転数を目標回転数に一致させるようなフィードバック制御により当該モータ/ジェネレータの目標トルクを求め、他方のモータ/ジェネレータの目標トルクをダイレクト配電により求める。
つまり選択部51は、モータ/ジェネレータMG1の回転数Nm1の絶対値がモータ/ジェネレータMG2の回転数Nm2の絶対値よりも小さい場合、演算部36a,37aで求めた第1(入力側)モータ/ジェネレータ目標トルクtTm1aおよび第2(出力側)モータ/ジェネレータ目標トルクtTm2aをそれぞれ第1(入力側)モータ/ジェネレータ目標トルクtTm1および第2(出力側)モータ/ジェネレータ目標トルクtTm2と定め、逆に、モータ/ジェネレータMG2の回転数Nm2の絶対値がモータ/ジェネレータMG1の回転数Nm1の絶対値よりも小さい場合、演算部46b,47bで求めた第2(出力側)モータ/ジェネレータ目標トルクtTm2bおよび第1(入力側)モータ/ジェネレータ目標トルクtTm1bをそれぞれ第2(出力側)モータ/ジェネレータ目標トルクtTm2および第1(入力側)モータ/ジェネレータ目標トルクtTm1と定める。
【0072】
かかる構成によれば、両モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2のうち絶対値が低い方のモータ/ジェネレータの実回転数を目標回転数に一致させるようなフィードバック制御により当該モータ/ジェネレータの目標トルクを求め、他方のモータ/ジェネレータの目標トルクはダイレクト配電により求めることから、
前記各実施の形態におけると同様な作用効果を奏し得るのに加えて、ダイレクト配電により一方のモータ/ジェネレータの回転数が0になる可能性を排除して、両モータ/ジェネレータの発電電力と消費電力とが一致してバッテリに対する充放電を抑制する効果を全回転領域で補償することができる。
【0073】
ここで、モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2のうち絶対値が低い方のモータ/ジェネレータの実回転数を目標回転数に一致させるようなフィードバック制御により当該モータ/ジェネレータの目標トルクを求めるのが良い理由は、前記のようなパワーバランス方式に目標トルクを求めるとトルクの大きさがモータ/ジェネレータの回転数比が支配的になり、また出力側モータ/ジェネレータMG2が負回転になることが多いため、回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータを適切に選ばないと目標回転数を実現できない場合があるからである。
【0074】
図2および図3の共線図に関連して以下に補足説明する。回転数Nm1が正、回転数Nm2が負である場合(例えばアイドル状態)を考えると、バッテリの充放電がないようにトルク制御を行うためには、モータ/ジェネレータMG1,MG2のトルクTm1,Tm2が共に正(図の上向きで、モータ/ジェネレータMG1は放電、モータ/ジェネレータMG2は充電)または負(図の下向きで、モータ/ジェネレータMG1が発電、モータ/ジェネレータMG2が放電)になる必要がある。
一方、出力(Out)上の駆動力が正(図の下向き)状態を維持するためには、モータ/ジェネレータMG1,MG2のトルクTm1,Tm2が共に正(図の上向き)である必要がある。
【0075】
モータ/ジェネレータ目標トルクを回転数フィードバック制御により求める場合においてモータ/ジェネレータMG1,MG2のトルクTm1,Tm2が共に正になるためには、目標となる回転状態が同じだとすると(車速が0で、アイドル運転相当)、実回転状態は回転数フィードバック制御により目標トルクを求めるモータ/ジェネレータに応じて異なる。
しかし、どちらの場合も回転数フィードバック制御により目標トルクを求めていない側のモータ/ジェネレータのバランストルクは目標回転数となるためのトルクと異なる方向となる。
簡単のためモータ/ジェネレータの損失を0とした場合、バッテリの充放電がない状態のモータ/ジェネレータMG1,MG2のトルクTm1,Tm2は(Tm1×Nm1=Tm2×Nm2)から明らかなように回転数Nm1,Nm2と反比例する。
【0076】
そのため、回転数Nm1,Nm2のうち絶対値が大きい方のモータ/ジェネレータで回転数フィードバック制御した場合、バランストルクは回転数フィードバック制御で得られたトルクより大きな絶対値を持つ。
このような状態になると共線図上のレバーが回転数の目標とは異なる方向に動いてしまう。
その結果、フィードバックトルクは一層大きな値を持つようになり、安定した状態を保つことができない。
【0077】
同様な不安定な状態は、モータ/ジェネレータMG1の回転数Nm1が負である場合にも発生する。
従って、一方のモータ/ジェネレータの回転数が負である場合、回転数絶対値が小さい方のモータ/ジェネレータの目標トルクを回転数フィードバック制御により求めないと安定した状態を維持することができない。
以上のことが、モータ/ジェネレータMG1,MG2のうち回転数(Nm1,Nm2)絶対値の低い方のモータ/ジェネレータの目標トルクを回転数フィードバック制御により求める理由である。
【0078】
なお、どちらのモータ/ジェネレータの目標トルクを回転数フィードバック制御により求めるかを上記ではモータ/ジェネレータ回転数の絶対値の大小のみにより決定することとしたが、これに加えて、両モータ/ジェネレータの回転数の比に応じても決定したり、両モータ/ジェネレータの回転数の差に応じても決定したり、エンジン回転数Neと変速機出力回転数Noとの比に応じても決定したり、エンジン回転数Neと変速機出力回転数Noとの差に応じても決定するようになすのが良く、この場合、フィードバック制御によるハンチングを防止することができる。
【図面の簡単な説明】
【図1】本発明による変速制御装置を適用し得るハイブリッド変速機を例示する線図的構成図である。
【図2】同ハイブリッド変速機の回転バランス式を求めるのに用いた共線図である。
【図3】同ハイブリッド変速機のトルクバランス式を求めるのに用いた共線図である。
【図4】本発明による変速制御装置を適用可能な他の形式のハイブリッド変速機を示す線図的構成図である。
【図5】本発明によるハイブリッド変速機の変速制御システムを示すブロック線図である。
【図6】本発明の一実施の形態になる変速制御装置を示す機能別ブロック線図である。
【図7】エンジンの最適燃費線を等出力線とともに例示するエンジンの性能線図である。
【図8】本発明の他の実施の形態になる変速制御装置を示す機能別ブロック線図である。
【図9】本発明の更に他の実施の形態になる変速制御装置を示す機能別ブロック線図である。
【図10】図1に示すハイブリッド変速機を、図6に示す装置により変速制御した場合における動作タイムチャートである。
【図11】従来のハイブリッド変速機の回転数バランス式を求めるのに用いた共線図である。
【図12】同ハイブリッド変速機のトルクバランス式を求めるのに用いた共線図である。
【図13】従来の変速制御装置を図1のハイブリッド変速機に適用した場合における変速制御の動作タイムチャートである。
【符号の説明】
1 変速機ケース
2 ラビニョオ型プラネタリギヤセット(差動装置)
ENG エンジン(原動機)
4 複合電流2層モータ
MG1 第1(入力側)モータ/ジェネレータ
MG2 第2(出力側)モータ/ジェネレータ
7 シングルピニオン遊星歯車組
8 ダブルピニオン遊星歯車組
S1 サンギヤ
S2 サンギヤ
P1 ロングピニオン
P2 ショートピニオン
R リングギヤ
C キャリア
21 ハイブリッドコントローラ
22 エンジンコントローラ
23 モータコントローラ
24 インバータ
25 バッテリ
26 アクセル開度センサ
27 車速センサ
28 エンジン回転センサ
29 第1モータ/ジェネレータ回転センサ
30 第2モータ/ジェネレータ回転センサ
31 目標駆動トルク演算部
32 目標エンジン(原動機)出力演算部
34 エンジン(原動機)動作点決定部
35 第1(入力側)モータ/ジェネレータ目標回転数演算部
36 第1(入力側)モータ/ジェネレータ目標トルク演算部
37 第2(出力側)モータ/ジェネレータ目標トルク演算部
45 第2(出力側)モータ/ジェネレータ目標回転数演算部
46 第2(出力側)モータ/ジェネレータ目標トルク演算部
47 第1(入力側)モータ/ジェネレータ目標トルク演算部
36a 第1(入力側)モータ/ジェネレータ目標トルクフィードバック演算部
37a ダイレクト配電用第2(出力側)モータ/ジェネレータ目標トルク演算部
46b 第2(出力側)モータ/ジェネレータ目標トルクフィードバック演算部
47b ダイレクト配電用第1(入力側)モータ/ジェネレータ目標トルク演算部
51 モータ/ジェネレータ目標トルク選択部
Claims (7)
- 共線図上に配置される回転メンバとして4個以上の回転メンバを有し、これら回転メンバのうち2個のメンバの回転状態を決定すると他のメンバの回転状態が決まる2自由度の差動装置を具え、共線図上の内側に位置する2個の内側回転メンバにそれぞれ原動機からの入力および駆動系への出力を結合し、共線図上の外側に位置する2個の外側回転メンバにそれぞれ2個のモータ/ジェネレータを結合し、これらモータ/ジェネレータの制御により無段変速を行い得るようにしたハイブリッド変速機において、
前記原動機のアクセル操作量から求めた目標駆動トルクと車速とから目標原動機出力を演算する目標原動機出力演算手段と、
前記目標原動機出力を発生させるための目標原動機回転数および目標原動機トルクの組み合わせにより規定した原動機動作点を決定する原動機動作点決定手段と、
前記目標原動機回転数および車速から共線図上の回転バランス式を解いて、前記入力に近い側における入力側モータ/ジェネレータの目標回転数を求める入力側モータ/ジェネレータ目標回転数演算手段と、
入力側モータ/ジェネレータの実回転数を前記入力側モータ/ジェネレータ目標回転数に一致させるための入力側モータ/ジェネレータの目標トルクを求める入力側モータ/ジェネレータ目標トルク演算手段と、
前記両モータ/ジェネレータの実回転数および前記入力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な出力側モータ/ジェネレータの目標トルクを求める出力側モータ/ジェネレータ目標トルク演算手段とを具備し、
原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、前記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクが達成されるよう構成したことを特徴とするハイブリッド変速機の変速制御装置。 - 請求項1に記載のハイブリッド変速機において、前記入力側モータ/ジェネレータ目標トルク演算手段が、入力側モータ/ジェネレータの実回転数を前記入力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により入力側モータ/ジェネレータの目標トルクを求めるよう構成したものであることを特徴とするハイブリッド変速機の変速制御装置。
- 共線図上に配置される回転メンバとして4個以上の回転メンバを有し、これら回転メンバのうち2個のメンバの回転状態を決定すると他のメンバの回転状態が決まる2自由度の差動装置を具え、共線図上の内側に位置する2個の内側回転メンバにそれぞれ原動機からの入力および駆動系への出力を結合し、共線図上の外側に位置する2個の外側回転メンバにそれぞれ2個のモータ/ジェネレータを結合し、これらモータ/ジェネレータの制御により無段変速を行い得るようにしたハイブリッド変速機において、
前記原動機のアクセル操作量から求めた目標駆動トルクと車速とから目標原動機出力を演算する目標原動機出力演算手段と、
前記目標原動機出力を発生させるための目標原動機回転数および目標原動機トルクの組み合わせにより規定した原動機動作点を決定する原動機動作点決定手段と、
前記目標原動機回転数および車速から共線図上の回転バランス式を解いて、前記出力に近い側における出力側モータ/ジェネレータの目標回転数を求める出力側モータ/ジェネレータ目標回転数演算手段と、
出力側モータ/ジェネレータの実回転数を前記出力側モータ/ジェネレータ目標回転数に一致させるための出力側モータ/ジェネレータの目標トルクを求める出力側モータ/ジェネレータ目標トルク演算手段と、
前記両モータ/ジェネレータの実回転数および前記出力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な入力側モータ/ジェネレータの目標トルクを求める入力側モータ/ジェネレータ目標トルク演算手段とを具備し、
原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、前記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクが達成されるよう構成したことを特徴とするハイブリッド変速機の変速制御装置。 - 請求項3に記載のハイブリッド変速機において、前記出力側モータ/ジェネレータ目標トルク演算手段が、出力側モータ/ジェネレータの実回転数を前記出力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により出力側モータ/ジェネレータの目標トルクを求めるよう構成したものであることを特徴とするハイブリッド変速機の変速制御装置。
- 共線図上に配置される回転メンバとして4個以上の回転メンバを有し、これら回転メンバのうち2個のメンバの回転状態を決定すると他のメンバの回転状態が決まる2自由度の差動装置を具え、共線図上の内側に位置する2個の内側回転メンバにそれぞれ原動機からの入力および駆動系への出力を結合し、共線図上の外側に位置する2個の外側回転メンバにそれぞれ2個のモータ/ジェネレータを結合し、これらモータ/ジェネレータの制御により無段変速を行い得るようにしたハイブリッド変速機において、
前記原動機のアクセル操作量から求めた目標駆動トルクと車速とから目標原動機出力を演算する目標原動機出力演算手段と、
前記目標原動機出力を発生させるための目標原動機回転数および目標原動機トルクの組み合わせにより規定した原動機動作点を決定する原動機動作点決定手段と、
前記目標原動機回転数および車速から共線図上の回転バランス式を解いて、前記入力に近い側における入力側モータ/ジェネレータの目標回転数を求める入力側モータ/ジェネレータ目標回転数演算手段と、
入力側モータ/ジェネレータの実回転数を前記入力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により入力側モータ/ジェネレータの目標トルクを求める入力側モータ/ジェネレータ目標トルクフィードバック演算手段と、
前記両モータ/ジェネレータの実回転数および前記フィードバック制御により求めた入力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な出力側モータ/ジェネレータの目標トルクを求めるダイレクト配電用出力側モータ/ジェネレータ目標トルク演算手段とを具備すると共に、
前記目標原動機回転数および車速から共線図上の回転バランス式を解いて、前記出力に近い側における出力側モータ/ジェネレータの目標回転数を求める出力側モータ/ジェネレータ目標回転数演算手段と、
出力側モータ/ジェネレータの実回転数を前記出力側モータ/ジェネレータ目標回転数に一致させるフィードバック制御により出力側モータ/ジェネレータの目標トルクを求める出力側モータ/ジェネレータ目標トルクフィードバック演算手段と、
前記両モータ/ジェネレータの実回転数および前記フィードバック制御により求めた出力側モータ/ジェネレータ目標トルクから、これらモータ/ジェネレータの一方による発電電力および他方による消費電力が一致するダイレクト配電となるのに必要な入力側モータ/ジェネレータの目標トルクを求めるダイレクト配電用入力側モータ/ジェネレータ目標トルク演算手段とを具備するほか、
前記両モータ/ジェネレータのうち回転数絶対値が低い方のモータ/ジェネレータに係わる目標トルクを前記フィードバック制御による目標トルクとし、他方のモータ/ジェネレータの目標トルクをダイレクト配電用の目標トルクとするモータ/ジェネレータ目標トルク選択手段を設け、
原動機、入力側モータ/ジェネレータおよび出力側モータ/ジェネレータをそれぞれ、前記対応する目標トルクが実現されるよう制御することにより前記目標駆動トルクが達成されるよう構成したことを特徴とするハイブリッド変速機の変速制御装置。 - 請求項5に記載のハイブリッド変速機において、前記モータ/ジェネレータ目標トルク選択手段が、前記フィードバック制御による目標トルクを用いるべきモータ/ジェネレータがどちらのモータ/ジェネレータであるかを、モータ/ジェネレータの回転数の比、または両モータ/ジェネレータの回転数の差、または原動機の回転数と変速機出力回転数との比、或いは原動機の回転数と変速機出力回転数との差に応じ決定するものであることを特徴とするハイブリッド変速機の変速制御装置。
- 請求項1乃至6のいずれか1項に記載のハイブリッド変速機において、前記原動機動作点決定手段が、前記目標原動機出力を最低燃費で発生させる原動機回転数および原動機トルクの組み合わせを前記目標原動機回転数および目標原動機トルクとして原動機動作点を定めるものであることを特徴とするハイブリッド変速機の変速制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002170168A JP2004015982A (ja) | 2002-06-11 | 2002-06-11 | ハイブリッド変速機の変速制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002170168A JP2004015982A (ja) | 2002-06-11 | 2002-06-11 | ハイブリッド変速機の変速制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004015982A true JP2004015982A (ja) | 2004-01-15 |
Family
ID=30436516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002170168A Pending JP2004015982A (ja) | 2002-06-11 | 2002-06-11 | ハイブリッド変速機の変速制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004015982A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007049703A1 (ja) * | 2005-10-26 | 2007-05-03 | Aisin Aw Co., Ltd. | 電動車両駆動制御装置及びその制御方法 |
| KR100737003B1 (ko) * | 2005-12-14 | 2007-07-09 | 현대자동차주식회사 | 직렬 및 병렬 하이브리드 자동차에서의 최적 운전점결정방법 |
| JP2009255667A (ja) * | 2008-04-15 | 2009-11-05 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| WO2012114431A1 (ja) | 2011-02-21 | 2012-08-30 | スズキ株式会社 | ハイブリッド車両の駆動制御装置 |
| WO2012114429A1 (ja) | 2011-02-21 | 2012-08-30 | スズキ株式会社 | ハイブリッド車両の駆動制御装置 |
| DE112011104844T5 (de) | 2011-02-04 | 2013-11-07 | Suzuki Motor Corporation | Antriebssteuerungsvorrichtung eines Hybridfahrzeugs |
| DE112011104904T5 (de) | 2011-02-17 | 2013-12-05 | Suzuki Motor Corporation | Antriebssteuergerät eines hybriden Fahrzeugs Fachgebiet |
| DE112011104905T5 (de) | 2011-02-17 | 2013-12-12 | Suzuki Motor Corporation | Fahrzeugsteuerung für ein Hybridfahrzeug |
| DE112011104798T5 (de) | 2011-01-31 | 2013-12-19 | Suzuki Motor Corporation | Antriebssteuervorrichtung für Hybridfahrzeug |
| DE112011104926T5 (de) | 2011-02-21 | 2013-12-24 | Suzuki Motor Corp. | Antriebssteuergerät eines hybriden Fahrzeugs |
-
2002
- 2002-06-11 JP JP2002170168A patent/JP2004015982A/ja active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007049703A1 (ja) * | 2005-10-26 | 2007-05-03 | Aisin Aw Co., Ltd. | 電動車両駆動制御装置及びその制御方法 |
| US7762365B2 (en) | 2005-10-26 | 2010-07-27 | Aisin Aw Co., Ltd. | Electric vehicle drive control device and control method therefor |
| KR100737003B1 (ko) * | 2005-12-14 | 2007-07-09 | 현대자동차주식회사 | 직렬 및 병렬 하이브리드 자동차에서의 최적 운전점결정방법 |
| JP2009255667A (ja) * | 2008-04-15 | 2009-11-05 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| DE112011104798T5 (de) | 2011-01-31 | 2013-12-19 | Suzuki Motor Corporation | Antriebssteuervorrichtung für Hybridfahrzeug |
| DE112011104844T5 (de) | 2011-02-04 | 2013-11-07 | Suzuki Motor Corporation | Antriebssteuerungsvorrichtung eines Hybridfahrzeugs |
| DE112011104904T5 (de) | 2011-02-17 | 2013-12-05 | Suzuki Motor Corporation | Antriebssteuergerät eines hybriden Fahrzeugs Fachgebiet |
| DE112011104905T5 (de) | 2011-02-17 | 2013-12-12 | Suzuki Motor Corporation | Fahrzeugsteuerung für ein Hybridfahrzeug |
| WO2012114431A1 (ja) | 2011-02-21 | 2012-08-30 | スズキ株式会社 | ハイブリッド車両の駆動制御装置 |
| WO2012114429A1 (ja) | 2011-02-21 | 2012-08-30 | スズキ株式会社 | ハイブリッド車両の駆動制御装置 |
| DE112011104926T5 (de) | 2011-02-21 | 2013-12-24 | Suzuki Motor Corp. | Antriebssteuergerät eines hybriden Fahrzeugs |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3641244B2 (ja) | ハイブリッド変速機の変速制御装置 | |
| JP3823949B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4169081B1 (ja) | 動力出力装置、それを備えたハイブリッド自動車、および動力出力装置の制御方法 | |
| CN100585226C (zh) | 具有双重机械路径和固定减速比的单模式、复合-分流式变速器 | |
| JP5818231B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| EP1426222B1 (en) | Hybrid transmission control system | |
| CN103380047B (zh) | 混合动力车辆的驱动控制装置 | |
| CN103339001B (zh) | 混合动力车辆的驱动控制装置 | |
| JP2005295691A (ja) | 動力出力装置およびこれを搭載する自動車 | |
| US7693637B2 (en) | Hybrid vehicle control system | |
| JP3991875B2 (ja) | ハイブリッド変速機 | |
| JP2004015982A (ja) | ハイブリッド変速機の変速制御装置 | |
| JP3938001B2 (ja) | ハイブリッド変速機の異常時制御方法 | |
| JP4086014B2 (ja) | 動力出力装置および自動車並びに動力出力装置の制御方法 | |
| JPWO2012105044A1 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP4005589B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力伝達装置 | |
| JP2004066840A (ja) | ハイブリッド変速機の変速制御装置 | |
| JP2004132285A (ja) | ハイブリッド変速機の変速制御装置 | |
| JP4462219B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4371067B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP3941776B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2004132421A (ja) | ハイブリッド変速機の制御方法 | |
| JP3885756B2 (ja) | ハイブリッド変速機の変速制御装置 | |
| JP4293176B2 (ja) | 動力出力装置及びこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP2007131047A (ja) | ハイブリッド車および駆動装置,ハイブリッドの制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040715 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20040715 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20040715 |