JP2004100838A - 微少・早送り装置 - Google Patents
微少・早送り装置 Download PDFInfo
- Publication number
- JP2004100838A JP2004100838A JP2002264144A JP2002264144A JP2004100838A JP 2004100838 A JP2004100838 A JP 2004100838A JP 2002264144 A JP2002264144 A JP 2002264144A JP 2002264144 A JP2002264144 A JP 2002264144A JP 2004100838 A JP2004100838 A JP 2004100838A
- Authority
- JP
- Japan
- Prior art keywords
- shaft
- screw portion
- rotation
- lead
- male screw
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Transmission Devices (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Abstract
【課題】大きな減速比が得られ、製作が容易で、強度の向上も図れ、耐久性を向上できる微少・早送り装置を提供することにある。
【解決手段】駆動ねじ部13を設けた第1の軸4と、第2の軸6と、この第2の軸に対して軸方向の移動のみ許容され、かつ駆動ねじ部とピッチ及びリードが同じでねじれ方向が異なる従動ねじ部15とからなり、モータ12によって第1の軸と第2の軸に回転数比を与えた状態でリードの進み方向が同方向になる回転を付与することにより、駆動ねじ部13の回転によるリードと従動ねじ部15の回転によるリードの差により従動ねじ部を第2の軸の軸方向に微少送りし、第1の軸と第2の軸をリードに進む方向が逆方向になる回転を付与することにより、駆動ねじ部の回転によるリードに対し従動ねじ部の回転によるリードが加算され、従動ねじ部を第2の軸の軸方向に早送りする。
【選択図】 図1
【解決手段】駆動ねじ部13を設けた第1の軸4と、第2の軸6と、この第2の軸に対して軸方向の移動のみ許容され、かつ駆動ねじ部とピッチ及びリードが同じでねじれ方向が異なる従動ねじ部15とからなり、モータ12によって第1の軸と第2の軸に回転数比を与えた状態でリードの進み方向が同方向になる回転を付与することにより、駆動ねじ部13の回転によるリードと従動ねじ部15の回転によるリードの差により従動ねじ部を第2の軸の軸方向に微少送りし、第1の軸と第2の軸をリードに進む方向が逆方向になる回転を付与することにより、駆動ねじ部の回転によるリードに対し従動ねじ部の回転によるリードが加算され、従動ねじ部を第2の軸の軸方向に早送りする。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
この発明は、微少送り・早送りを必要とする例えば薬剤注入器等の医療機器、精密機器等の産業機器に適用される微少・早送り装置に関する。
【0002】
【従来の技術】
例えば、医療における治療として患部に長時間かけて安定して薬剤を注入する処方がある。この場合、体腔内の患部に連通するカテーテルを注入器に接続し、注入器を微少送りして薬剤を微量ずつ徐々に患部に注入する必要があり、注入器を人為的に操作することは不可能である。
【0003】
そこで、従来においては、駆動源としてモータを使用し、モータの回転を減速歯車機構によって減速して雄ねじを回転させ、この雄ねじと螺合する雌ねじを有したナットによって回転運動を直線運動に変換してスライダーを移動させ、このスライダーの移動によって注入器を駆動させている。
【0004】
【発明が解決しようとする課題】
しかしながら、注入器を入力回転数にもよるが1時間に1mm以下で超微少送りするためには、減速歯車機構として多数のギヤが必要となり、動力伝達のロスとともに、減速歯車機構が大型化するという問題がある。
【0005】
また、雄ねじと雌ねじの螺合による減速は、ねじ山のピッチ及びリードを微少にする必要があり、加工精度が要求されるとともに、ねじ部の強度の面においても問題がある。また、雄ねじは精密加工がしやすいが雌ねじのねじ山のピッチ及びリードを微少に加工することは困難である。
【0006】
さらに、注入器の場合、超微少送りによってシリンジ内の薬剤を完全に注入した後は、ピストンを戻してシリンジ内に薬剤を入れ直す必要がある。この場合、ピストンを素早く戻すことが要求されているが、送り方向と逆方向に回転させてもピストンを素早く戻すことはできず、待ち時間が長くなり、作業性が悪いという問題がある。
【0007】
この発明は、前記事情に着目してなされたもので、その目的とするところは、微少送り・早送りができるとともに、加工が容易で高精度に製作できる微少・早送り装置を提供することにある。
【0008】
【課題を解決するための手段】
この発明は、前記目的を解決するために、請求項1は、第1の雄ねじ部を設けた回転自在な第1の軸と、この第1の軸と平行に設けた回転自在な第2の軸と、この第2の軸に対して周方向の回転は拘束され、軸方向の移動は許容された状態で前記第1の軸の雄ねじ部に係合され、かつ前記第1の雄ねじ部とピッチ及びリードが同じでねじれ方向が異なる第2の雄ねじ部と、前記第1の軸と第2の軸を回転させる駆動手段とからなり、前記駆動手段によって前記第1の軸と第2の軸に回転数比を与えた状態でリードの進み方向が同方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードと第2の雄ねじ部の回転によるリードの差により第2の雄ねじ部を第2の軸の軸方向に微少送りし、前記第1の軸と第2の軸をリードに進む方向が逆方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードに対し第2の雄ねじ部の回転によるリードが加算され、第2の雄ねじ部を第2の軸の軸方向に早送りすることを特徴とする微少・早送り装置にある。
【0009】
請求項2は、請求項1の前記第2の軸は、その軸方向にキー溝を有しており、第2の雄ねじ部が前記キー溝と係合して第2の軸に対して回転不能で、かつ軸方向に移動自在に嵌合されていることを特徴とする。
【0010】
請求項3は、請求項1の前記駆動手段は、前記第1及び第2の軸の軸端部に設けられたモータであることを特徴とする。
【0011】
請求項4は、請求項1の前記駆動手段は、前記第1及び第2の軸の一方の軸端部に設けられたモータと、他方の軸端部に設けられたアイドルギヤを含むギヤであることを特徴とする。
【0012】
請求項5は、請求項1の前記第2の雄ねじ部には、これと一体的に移動するスライダーを備え、このスライダーは被駆動部材に連動して微少送りすることを特徴とする。
【0013】
前記構成によれば、前記駆動手段によって前記第1の軸と第2の軸に回転数比を与えた状態でリードの進み方向が同方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードと第2の雄ねじ部の回転によるリードの差により第2の雄ねじ部を第2の軸の軸方向に微少送りする。また、前記第1の軸と第2の軸をリードに進む方向が逆方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードに対し第2の雄ねじ部の回転によるリードが加算され、第2の雄ねじ部を第2の軸の軸方向に早送りする。
【0014】
このようにピッチ及びリード角が同じでねじれ方向が異なる第1の雄ねじ部と第2の雄ねじ部とを係合することにより、第1の雄ねじ部の回転による進みに対してねじれ方向が逆である第2の雄ねじ部によって戻されることになり、大きな減速が得られる。さらに、第1と第2の雄ねじ部の回転比及びねじのピッチとねじれ方向により自在な微少移動量と方向が設定できる。
【0015】
【発明の実施の形態】
以下、この発明の実施の形態を図面に基づいて説明する。
【0016】
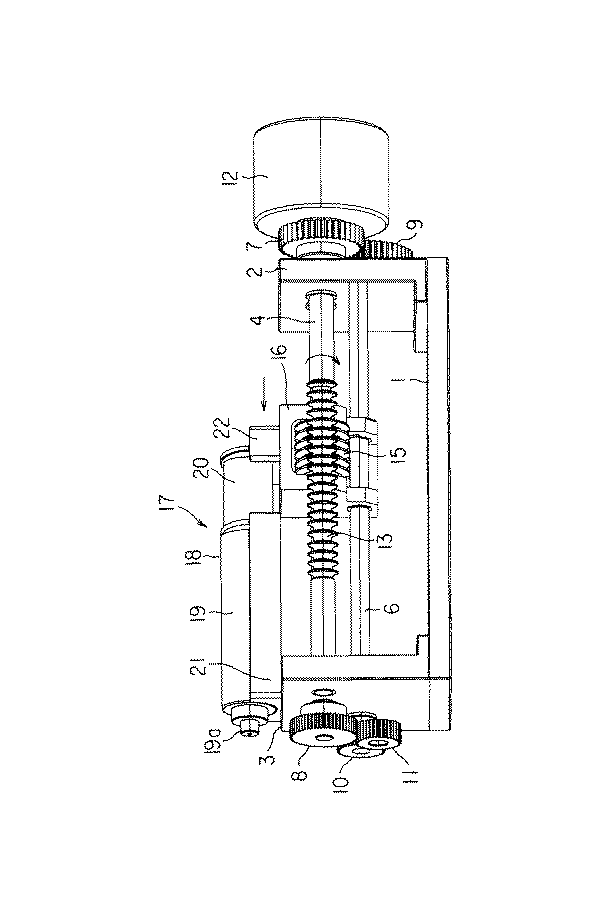
図1〜図3は第1の実施形態を示し、図1(a)は微少・早送り装置の斜視図、(b)はA−A線に沿う断面図、図2は要部の斜視図、図3は医療機器に採用した場合の微少・早送り装置の斜視図である。
【0017】
図1に示すように、長方形状の基台1の長手方向の両端部には支持板2,3が対峙した状態に設けられている。一対の支持板2,3間には円柱棒状の第1の軸4、第2の軸5及び第3の軸6が互いに離間して平行に配置されており、各軸4,5,6の両端部は支持板2,3に軸受4a,5a,6aを介して回転自在に支持されている。
【0018】
第1の軸4の一端部には支持板2の外側部において第1のギヤ7が嵌着されている。第2の軸5の一端部には支持板3の外側部において第2のギヤ8が嵌着されている。第1の軸4及び第2の軸5の他端部は軸受4a,5aにそれぞれ回転自在に支持されている。
【0019】
第3の軸6の一端部には支持板2の外側部において第3のギヤ9が嵌着され、この第3のギヤ9は第1のギヤ7と噛合し、第1の軸4の回転が第3の軸6に伝達されるようになっている。
【0020】
第3の軸6の他端部には支持板3の外側部において第4のギヤ10が嵌着され、この第4のギヤ10は第2のギヤ8の隣側に離間して設けられている。また、第2のギヤ8と第4のギヤ10はアイドルギヤ11と噛合されている。なお、第4のギヤ10は第2の軸5を第3の軸6と同一方向に回転する際にはアイドルギヤ11を介して第2のギヤ8と噛合し、第2の軸5を逆方向に回転させる際にはアイドルギヤ11を介さず、第2のギヤ8と噛合するようになっている。
【0021】
前記第1のギヤ7側には駆動手段としてのモータ12が設けられている。このモータ12の回転軸は第1のギヤ7に直結されている。従って、第1のギヤ7の回転は第3のギヤ9に伝達され、第3の軸6が回転し、第3の軸6の回転は第4のギヤ10を介してアイドルギヤ11に伝達され、アイドルギヤ11の回転は第2のギヤ8を介して第2の軸5に伝達されるようになっている。
【0022】
第1の軸4にはこれと一体に、第1の雄ねじ部としての例えば左ねじからなる駆動ねじ部13が設けられている。また、第2の軸5には軸方向に亘ってキー溝14が設けられている。この第2の軸5にはキー溝14と係合した状態で、第2の雄ねじ部としての例えば右ねじからなる従動ねじ部15が嵌合されている。従って、従動ねじ部15は第2の軸5に対して周方向の回転は拘束され、軸方向の移動は許容された状態で第1の軸4の駆動ねじ部13に係合されている。
【0023】
駆動ねじ部13と従動ねじ部15とはねじ山のピッチとリード角が同じであるが、駆動ねじ部13が左ねじで、従動ねじ部15は右ねじであることから、ねじれ方向が逆である。
【0024】
また、駆動ねじ部13と従動ねじ部15のリードの進み方向が同じとなる回転と互いの総リードが同じになるような回転数を付与すると、従動ねじ部15は第2の軸5の軸方向に対して静止した状態を保つが、前記条件にて第2の軸5を回転して駆動ねじ部13のリードと従動ねじ部15のリードに差を付けるように回転数比を与えると、従動ねじ部15は駆動ねじ部13のリードと従動ねじ部15の総リードの差の分だけ第2の軸5の軸方向に微少移動するようになっている。ここで、総リード=ねじ山のリード×回転数である。
【0025】
従動ねじ部15にはこれを覆うようにスライダー16が設けられ、スライダー16は従動ねじ部15と一体的に第3の軸6の軸方向に移動するようになっている。そして、スライダー16によって被駆動部材17を駆動できるようになっている。
【0026】
被駆動部材17は、本実施形態では、第3の軸6と平行に設けられた注入器18であり、この注入器18は注入口19aを有するシリンジ19と、このシリンジ18に対して進退自在に挿入されたピストン20とから構成されている。
【0027】
シリンジ19は固定ホルダー21によって支持板3に固定され、ピストン20はスライドホルダー22を介してスライダー16と連結されている。従って、スライダー16の移動によってピストン20がシリンジ18に対して進退するようになっている。
【0028】
次に、前述のように構成された微少・早送り装置の作用について説明する。注入器18のシリンジ19に薬剤を収容し、ピストン20を微少送りして薬剤をシリンジ19の注入口19aから微量ずつ安定して注入する場合について説明する。
【0029】
モータ12を駆動すると、第1のギヤ7及び第1の軸4が矢印a方向に回転する。第1のギヤ7に噛合している第3のギヤ9を介して第3の軸6が矢印b方向に回転し、第4のギヤ10も同方向に回転する。第4のギヤ10の回転はアイドルギヤ11を介して第2のギヤ8に伝達されるため、第2の軸5が第1の軸4と逆方向の矢印c方向に回転する。
【0030】
第2の軸5に嵌合された従動ねじ部15は第2の軸5に対して周方向の回転は拘束され、軸方向の移動は許容された状態で第1の軸4の駆動ねじ部13に係合されている。
【0031】
また、駆動ねじ部13と従動ねじ部15とはねじ山のピッチとリード角が同じであるが、駆動ねじ部13が左ねじで、従動ねじ部15は右ねじであることから、ねじれ方向が逆である。
【0032】
また、駆動ねじ部13と従動ねじ部15のリードの進む方向が同じとなる回転と互いの総リードが同じになるような回転数を付与すると、従って、従動ねじ部15は第2の軸5の軸方向に対して静止した状態を保つが、前記条件にて第2の軸5を回転して駆動ねじ部13のリードと従動ねじ部15のリードに差を付けるように回転数比を与えると、従動ねじ部15は駆動ねじ部13のリードと従動ねじ部15の総リードの差の分だけ第2の軸5の軸方向に微少移動する。
【0033】
このようにピッチ及びリード角が同じでねじれ方向が異なる駆動ねじ部13と従動ねじ部15とを係合することにより、駆動ねじ部13の回転による進みに対してねじれ方向が逆である従動ねじ部15によって戻されることになり、大きな減速が得られる。ここで、矢印dは駆動ねじ部13と従動ねじ部15の回転方向とねじれ方向によるリードの進み方向を示し、従動ねじ部15の矢印d方向の微少送りによってスライダー16が一体的に移動する。
【0034】
スライダー16の移動はスライドホルダー22を介して注入器19のピストン20に伝達され、ピストン20はシリンジ19に収容された薬液を注入口19aから微量ずつ注入することができる。すなわち、患者の患部に薬液を数日間かけて超微量ずつ安定して注入する処方において、本装置が好適するものである。
【0035】
また、シリンジ19内の薬液を全て注入し、シリンジ19内に新たに薬液を補給する場合には、ピストン20を戻す必要があり、また新しいシリンジ19と交換する場合にもスライダーホルダー22を含むスライダー16を復帰させる必要がある。
【0036】
この場合、アイドルギヤ11を外し、第2のギヤ8と第4のギヤ10とを噛合させると、第2の軸5が矢印c方向と逆方向に回転する。つまり、第1の軸4と第2の軸5をリードの進み方向が逆方向になる回転を付与する。駆動ねじ部13と従動ねじ部15のリードに進み方向が反対となる回転を与えると、従動ねじ部15またはスライダー16は各ねじ部の総リードの和の分軸方向に移動する。従って、従動ねじ部15を第2の軸5の軸方向(矢印d方向と逆方向)に早送りすることができる。
【0037】
なお、駆動ねじ部13と従動ねじ部15を雄ねじ部によって形成したが、両者をウォームギヤとして互いに噛合するようにしても同様の効果が得られるものであり、雄ねじ部はウォームギヤを含むものである。
【0038】
ここで、関係式を示すと、
▲1▼駆動ねじ部13の1回転当りのスライダー16の進む量δ(mm)
【数1】
 A:第1のギヤ7の歯数
A:第1のギヤ7の歯数
D:第2のギヤ8の歯数
B:第3のギヤ9の歯数
C:第4のギヤ10の歯数
La :駆動ねじ部13のリード(mm)
Lb :従動ねじ部15のリード(mm)
± :駆動ねじ部13と従動ねじ部15の回転方向が反対の場合は−で微少送り(アイドルギヤ11要)
駆動ねじ部13と従動ねじ部15の回転方向が同一の場合は+で早送り(アイドルギヤ11不要)
▲2▼LaとLbの進む方向及びスライダー16の進む方向の定義
駆動ねじ部13と従動ねじ部15のねじれ及び回転方向によりリードの進む方向が向かって右側となる回転方向及びスライダー16の移動方向は+(右移動)と反対方向を−(左方向)とした。
【0039】
▲3▼駆動ねじ部13の1回転当りのスライダー16の進む量δ(mm)の計算例
駆動ねじ部13:La=3.1509288(m0.5P.C.D=φ13zw=2条−L)
従動ねじ部15:Lb=6.3018575(m0.5P.C.D=φ26zw=4条−R)
m:モジュール
zw:条数
P.C.D:ピッチ円直径
第1のギヤA=57、第2のギヤD=48、第3のギヤB=78、第4のギヤC=33 アイドルギヤ11付き
駆動ねじ部13と従動ねじ部15の互いのリードの進む方向を−方向となる回転方向とした場合、
δ=+0.0151486/rev
回転方向を互いのリードの進む方向を逆に+側(+方向)した場合、
δ=−0.0151486/rev
なお、ギヤ比の変更、駆動ねじ部13と従動ねじ部15の回転比及びねじのピッチさらにねじれ方向を変更することにより、自在な微少移動量と方向を設定することができる。
【0040】
さらに、第1の軸4にモータ12を直結して回転駆動し、第2の軸5の回転は、アイドルギヤ11からの回転によって駆動するようにしたが、第2の軸5の一端部にもモータを直結して回転駆動し、アイドルギヤ11を含む第2のギヤ8を省略してもよい。要は、第2の軸5を第1の軸4と逆方向(微少送り)に回転させたり、同方向(早送り)に回転させることができればよい。
【0041】
なお、前記実施形態においては、左右一対の支持板2.3をそれぞれ1枚板で一体構造としたが、第3の軸6を境として第1の軸4側の支持板と第2の軸5側の支持板とを2分割し、第3の軸6を支点として支持板2.3を回動可能とすれば、駆動ねじ部13と従動ねじ部15の噛合を瞬時に切り離すことができる。従って、従動ねじ部15及びスライダー16を軸方向に手動で移動させることもできる。
【0042】
なお、前記実施形態においては、微少・早送り装置を医療機器の薬剤の注入器に採用した場合について説明したが、矯正機器、塗料及び食品関連の自動調合機、精密機器、光学機器、測定機器、ジャッキ等の微少送り・早送りを必要とするあらゆる産業機器に適用することができる。
【0043】
【発明の効果】
以上説明したように、この発明によれば、ピッチ及びリード角が同じでねじれ方向が異なる第1の雄ねじ部と第2の雄ねじ部とを係合することにより、ねじのピッチを小さくすることなく、1回転でミクロン単位の送りが可能な大きな減速比が得られ、製作が容易で、強度の向上も図れ、耐久性を向上できる。さらに、モータの出力軸に大きな比の減速歯車機構を設ける必要がなく、装置の小型化、軽量化が図れ、微少送り、早送りを必要とするあらゆる産業機器に適用できる。
【0044】
また、雄ねじ同士の係合であり、雄ねじと雌ねじの係合に比べ、加工性が優れ、高精度の加工ができる。
【図面の簡単な説明】
【図1】この発明の第1の実施形態を示し、(a)は微少・早送り装置の斜視図、(b)はA−A線に沿う断面図。
【図2】同実施形態を示し、要部の斜視図。
【図3】同実施形態を示し、医療機器に採用した場合の微少・早送り装置の斜視図。
【符号の説明】
4…第1の軸
5…第2の軸
12…モータ(駆動手段)
13…駆動ねじ部(第1の雄ねじ部)
15…従動ねじ部(第2の雄ねじ部)
16…スライダー
17…被駆動部材
【発明の属する技術分野】
この発明は、微少送り・早送りを必要とする例えば薬剤注入器等の医療機器、精密機器等の産業機器に適用される微少・早送り装置に関する。
【0002】
【従来の技術】
例えば、医療における治療として患部に長時間かけて安定して薬剤を注入する処方がある。この場合、体腔内の患部に連通するカテーテルを注入器に接続し、注入器を微少送りして薬剤を微量ずつ徐々に患部に注入する必要があり、注入器を人為的に操作することは不可能である。
【0003】
そこで、従来においては、駆動源としてモータを使用し、モータの回転を減速歯車機構によって減速して雄ねじを回転させ、この雄ねじと螺合する雌ねじを有したナットによって回転運動を直線運動に変換してスライダーを移動させ、このスライダーの移動によって注入器を駆動させている。
【0004】
【発明が解決しようとする課題】
しかしながら、注入器を入力回転数にもよるが1時間に1mm以下で超微少送りするためには、減速歯車機構として多数のギヤが必要となり、動力伝達のロスとともに、減速歯車機構が大型化するという問題がある。
【0005】
また、雄ねじと雌ねじの螺合による減速は、ねじ山のピッチ及びリードを微少にする必要があり、加工精度が要求されるとともに、ねじ部の強度の面においても問題がある。また、雄ねじは精密加工がしやすいが雌ねじのねじ山のピッチ及びリードを微少に加工することは困難である。
【0006】
さらに、注入器の場合、超微少送りによってシリンジ内の薬剤を完全に注入した後は、ピストンを戻してシリンジ内に薬剤を入れ直す必要がある。この場合、ピストンを素早く戻すことが要求されているが、送り方向と逆方向に回転させてもピストンを素早く戻すことはできず、待ち時間が長くなり、作業性が悪いという問題がある。
【0007】
この発明は、前記事情に着目してなされたもので、その目的とするところは、微少送り・早送りができるとともに、加工が容易で高精度に製作できる微少・早送り装置を提供することにある。
【0008】
【課題を解決するための手段】
この発明は、前記目的を解決するために、請求項1は、第1の雄ねじ部を設けた回転自在な第1の軸と、この第1の軸と平行に設けた回転自在な第2の軸と、この第2の軸に対して周方向の回転は拘束され、軸方向の移動は許容された状態で前記第1の軸の雄ねじ部に係合され、かつ前記第1の雄ねじ部とピッチ及びリードが同じでねじれ方向が異なる第2の雄ねじ部と、前記第1の軸と第2の軸を回転させる駆動手段とからなり、前記駆動手段によって前記第1の軸と第2の軸に回転数比を与えた状態でリードの進み方向が同方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードと第2の雄ねじ部の回転によるリードの差により第2の雄ねじ部を第2の軸の軸方向に微少送りし、前記第1の軸と第2の軸をリードに進む方向が逆方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードに対し第2の雄ねじ部の回転によるリードが加算され、第2の雄ねじ部を第2の軸の軸方向に早送りすることを特徴とする微少・早送り装置にある。
【0009】
請求項2は、請求項1の前記第2の軸は、その軸方向にキー溝を有しており、第2の雄ねじ部が前記キー溝と係合して第2の軸に対して回転不能で、かつ軸方向に移動自在に嵌合されていることを特徴とする。
【0010】
請求項3は、請求項1の前記駆動手段は、前記第1及び第2の軸の軸端部に設けられたモータであることを特徴とする。
【0011】
請求項4は、請求項1の前記駆動手段は、前記第1及び第2の軸の一方の軸端部に設けられたモータと、他方の軸端部に設けられたアイドルギヤを含むギヤであることを特徴とする。
【0012】
請求項5は、請求項1の前記第2の雄ねじ部には、これと一体的に移動するスライダーを備え、このスライダーは被駆動部材に連動して微少送りすることを特徴とする。
【0013】
前記構成によれば、前記駆動手段によって前記第1の軸と第2の軸に回転数比を与えた状態でリードの進み方向が同方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードと第2の雄ねじ部の回転によるリードの差により第2の雄ねじ部を第2の軸の軸方向に微少送りする。また、前記第1の軸と第2の軸をリードに進む方向が逆方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードに対し第2の雄ねじ部の回転によるリードが加算され、第2の雄ねじ部を第2の軸の軸方向に早送りする。
【0014】
このようにピッチ及びリード角が同じでねじれ方向が異なる第1の雄ねじ部と第2の雄ねじ部とを係合することにより、第1の雄ねじ部の回転による進みに対してねじれ方向が逆である第2の雄ねじ部によって戻されることになり、大きな減速が得られる。さらに、第1と第2の雄ねじ部の回転比及びねじのピッチとねじれ方向により自在な微少移動量と方向が設定できる。
【0015】
【発明の実施の形態】
以下、この発明の実施の形態を図面に基づいて説明する。
【0016】
図1〜図3は第1の実施形態を示し、図1(a)は微少・早送り装置の斜視図、(b)はA−A線に沿う断面図、図2は要部の斜視図、図3は医療機器に採用した場合の微少・早送り装置の斜視図である。
【0017】
図1に示すように、長方形状の基台1の長手方向の両端部には支持板2,3が対峙した状態に設けられている。一対の支持板2,3間には円柱棒状の第1の軸4、第2の軸5及び第3の軸6が互いに離間して平行に配置されており、各軸4,5,6の両端部は支持板2,3に軸受4a,5a,6aを介して回転自在に支持されている。
【0018】
第1の軸4の一端部には支持板2の外側部において第1のギヤ7が嵌着されている。第2の軸5の一端部には支持板3の外側部において第2のギヤ8が嵌着されている。第1の軸4及び第2の軸5の他端部は軸受4a,5aにそれぞれ回転自在に支持されている。
【0019】
第3の軸6の一端部には支持板2の外側部において第3のギヤ9が嵌着され、この第3のギヤ9は第1のギヤ7と噛合し、第1の軸4の回転が第3の軸6に伝達されるようになっている。
【0020】
第3の軸6の他端部には支持板3の外側部において第4のギヤ10が嵌着され、この第4のギヤ10は第2のギヤ8の隣側に離間して設けられている。また、第2のギヤ8と第4のギヤ10はアイドルギヤ11と噛合されている。なお、第4のギヤ10は第2の軸5を第3の軸6と同一方向に回転する際にはアイドルギヤ11を介して第2のギヤ8と噛合し、第2の軸5を逆方向に回転させる際にはアイドルギヤ11を介さず、第2のギヤ8と噛合するようになっている。
【0021】
前記第1のギヤ7側には駆動手段としてのモータ12が設けられている。このモータ12の回転軸は第1のギヤ7に直結されている。従って、第1のギヤ7の回転は第3のギヤ9に伝達され、第3の軸6が回転し、第3の軸6の回転は第4のギヤ10を介してアイドルギヤ11に伝達され、アイドルギヤ11の回転は第2のギヤ8を介して第2の軸5に伝達されるようになっている。
【0022】
第1の軸4にはこれと一体に、第1の雄ねじ部としての例えば左ねじからなる駆動ねじ部13が設けられている。また、第2の軸5には軸方向に亘ってキー溝14が設けられている。この第2の軸5にはキー溝14と係合した状態で、第2の雄ねじ部としての例えば右ねじからなる従動ねじ部15が嵌合されている。従って、従動ねじ部15は第2の軸5に対して周方向の回転は拘束され、軸方向の移動は許容された状態で第1の軸4の駆動ねじ部13に係合されている。
【0023】
駆動ねじ部13と従動ねじ部15とはねじ山のピッチとリード角が同じであるが、駆動ねじ部13が左ねじで、従動ねじ部15は右ねじであることから、ねじれ方向が逆である。
【0024】
また、駆動ねじ部13と従動ねじ部15のリードの進み方向が同じとなる回転と互いの総リードが同じになるような回転数を付与すると、従動ねじ部15は第2の軸5の軸方向に対して静止した状態を保つが、前記条件にて第2の軸5を回転して駆動ねじ部13のリードと従動ねじ部15のリードに差を付けるように回転数比を与えると、従動ねじ部15は駆動ねじ部13のリードと従動ねじ部15の総リードの差の分だけ第2の軸5の軸方向に微少移動するようになっている。ここで、総リード=ねじ山のリード×回転数である。
【0025】
従動ねじ部15にはこれを覆うようにスライダー16が設けられ、スライダー16は従動ねじ部15と一体的に第3の軸6の軸方向に移動するようになっている。そして、スライダー16によって被駆動部材17を駆動できるようになっている。
【0026】
被駆動部材17は、本実施形態では、第3の軸6と平行に設けられた注入器18であり、この注入器18は注入口19aを有するシリンジ19と、このシリンジ18に対して進退自在に挿入されたピストン20とから構成されている。
【0027】
シリンジ19は固定ホルダー21によって支持板3に固定され、ピストン20はスライドホルダー22を介してスライダー16と連結されている。従って、スライダー16の移動によってピストン20がシリンジ18に対して進退するようになっている。
【0028】
次に、前述のように構成された微少・早送り装置の作用について説明する。注入器18のシリンジ19に薬剤を収容し、ピストン20を微少送りして薬剤をシリンジ19の注入口19aから微量ずつ安定して注入する場合について説明する。
【0029】
モータ12を駆動すると、第1のギヤ7及び第1の軸4が矢印a方向に回転する。第1のギヤ7に噛合している第3のギヤ9を介して第3の軸6が矢印b方向に回転し、第4のギヤ10も同方向に回転する。第4のギヤ10の回転はアイドルギヤ11を介して第2のギヤ8に伝達されるため、第2の軸5が第1の軸4と逆方向の矢印c方向に回転する。
【0030】
第2の軸5に嵌合された従動ねじ部15は第2の軸5に対して周方向の回転は拘束され、軸方向の移動は許容された状態で第1の軸4の駆動ねじ部13に係合されている。
【0031】
また、駆動ねじ部13と従動ねじ部15とはねじ山のピッチとリード角が同じであるが、駆動ねじ部13が左ねじで、従動ねじ部15は右ねじであることから、ねじれ方向が逆である。
【0032】
また、駆動ねじ部13と従動ねじ部15のリードの進む方向が同じとなる回転と互いの総リードが同じになるような回転数を付与すると、従って、従動ねじ部15は第2の軸5の軸方向に対して静止した状態を保つが、前記条件にて第2の軸5を回転して駆動ねじ部13のリードと従動ねじ部15のリードに差を付けるように回転数比を与えると、従動ねじ部15は駆動ねじ部13のリードと従動ねじ部15の総リードの差の分だけ第2の軸5の軸方向に微少移動する。
【0033】
このようにピッチ及びリード角が同じでねじれ方向が異なる駆動ねじ部13と従動ねじ部15とを係合することにより、駆動ねじ部13の回転による進みに対してねじれ方向が逆である従動ねじ部15によって戻されることになり、大きな減速が得られる。ここで、矢印dは駆動ねじ部13と従動ねじ部15の回転方向とねじれ方向によるリードの進み方向を示し、従動ねじ部15の矢印d方向の微少送りによってスライダー16が一体的に移動する。
【0034】
スライダー16の移動はスライドホルダー22を介して注入器19のピストン20に伝達され、ピストン20はシリンジ19に収容された薬液を注入口19aから微量ずつ注入することができる。すなわち、患者の患部に薬液を数日間かけて超微量ずつ安定して注入する処方において、本装置が好適するものである。
【0035】
また、シリンジ19内の薬液を全て注入し、シリンジ19内に新たに薬液を補給する場合には、ピストン20を戻す必要があり、また新しいシリンジ19と交換する場合にもスライダーホルダー22を含むスライダー16を復帰させる必要がある。
【0036】
この場合、アイドルギヤ11を外し、第2のギヤ8と第4のギヤ10とを噛合させると、第2の軸5が矢印c方向と逆方向に回転する。つまり、第1の軸4と第2の軸5をリードの進み方向が逆方向になる回転を付与する。駆動ねじ部13と従動ねじ部15のリードに進み方向が反対となる回転を与えると、従動ねじ部15またはスライダー16は各ねじ部の総リードの和の分軸方向に移動する。従って、従動ねじ部15を第2の軸5の軸方向(矢印d方向と逆方向)に早送りすることができる。
【0037】
なお、駆動ねじ部13と従動ねじ部15を雄ねじ部によって形成したが、両者をウォームギヤとして互いに噛合するようにしても同様の効果が得られるものであり、雄ねじ部はウォームギヤを含むものである。
【0038】
ここで、関係式を示すと、
▲1▼駆動ねじ部13の1回転当りのスライダー16の進む量δ(mm)
【数1】
D:第2のギヤ8の歯数
B:第3のギヤ9の歯数
C:第4のギヤ10の歯数
La :駆動ねじ部13のリード(mm)
Lb :従動ねじ部15のリード(mm)
± :駆動ねじ部13と従動ねじ部15の回転方向が反対の場合は−で微少送り(アイドルギヤ11要)
駆動ねじ部13と従動ねじ部15の回転方向が同一の場合は+で早送り(アイドルギヤ11不要)
▲2▼LaとLbの進む方向及びスライダー16の進む方向の定義
駆動ねじ部13と従動ねじ部15のねじれ及び回転方向によりリードの進む方向が向かって右側となる回転方向及びスライダー16の移動方向は+(右移動)と反対方向を−(左方向)とした。
【0039】
▲3▼駆動ねじ部13の1回転当りのスライダー16の進む量δ(mm)の計算例
駆動ねじ部13:La=3.1509288(m0.5P.C.D=φ13zw=2条−L)
従動ねじ部15:Lb=6.3018575(m0.5P.C.D=φ26zw=4条−R)
m:モジュール
zw:条数
P.C.D:ピッチ円直径
第1のギヤA=57、第2のギヤD=48、第3のギヤB=78、第4のギヤC=33 アイドルギヤ11付き
駆動ねじ部13と従動ねじ部15の互いのリードの進む方向を−方向となる回転方向とした場合、
δ=+0.0151486/rev
回転方向を互いのリードの進む方向を逆に+側(+方向)した場合、
δ=−0.0151486/rev
なお、ギヤ比の変更、駆動ねじ部13と従動ねじ部15の回転比及びねじのピッチさらにねじれ方向を変更することにより、自在な微少移動量と方向を設定することができる。
【0040】
さらに、第1の軸4にモータ12を直結して回転駆動し、第2の軸5の回転は、アイドルギヤ11からの回転によって駆動するようにしたが、第2の軸5の一端部にもモータを直結して回転駆動し、アイドルギヤ11を含む第2のギヤ8を省略してもよい。要は、第2の軸5を第1の軸4と逆方向(微少送り)に回転させたり、同方向(早送り)に回転させることができればよい。
【0041】
なお、前記実施形態においては、左右一対の支持板2.3をそれぞれ1枚板で一体構造としたが、第3の軸6を境として第1の軸4側の支持板と第2の軸5側の支持板とを2分割し、第3の軸6を支点として支持板2.3を回動可能とすれば、駆動ねじ部13と従動ねじ部15の噛合を瞬時に切り離すことができる。従って、従動ねじ部15及びスライダー16を軸方向に手動で移動させることもできる。
【0042】
なお、前記実施形態においては、微少・早送り装置を医療機器の薬剤の注入器に採用した場合について説明したが、矯正機器、塗料及び食品関連の自動調合機、精密機器、光学機器、測定機器、ジャッキ等の微少送り・早送りを必要とするあらゆる産業機器に適用することができる。
【0043】
【発明の効果】
以上説明したように、この発明によれば、ピッチ及びリード角が同じでねじれ方向が異なる第1の雄ねじ部と第2の雄ねじ部とを係合することにより、ねじのピッチを小さくすることなく、1回転でミクロン単位の送りが可能な大きな減速比が得られ、製作が容易で、強度の向上も図れ、耐久性を向上できる。さらに、モータの出力軸に大きな比の減速歯車機構を設ける必要がなく、装置の小型化、軽量化が図れ、微少送り、早送りを必要とするあらゆる産業機器に適用できる。
【0044】
また、雄ねじ同士の係合であり、雄ねじと雌ねじの係合に比べ、加工性が優れ、高精度の加工ができる。
【図面の簡単な説明】
【図1】この発明の第1の実施形態を示し、(a)は微少・早送り装置の斜視図、(b)はA−A線に沿う断面図。
【図2】同実施形態を示し、要部の斜視図。
【図3】同実施形態を示し、医療機器に採用した場合の微少・早送り装置の斜視図。
【符号の説明】
4…第1の軸
5…第2の軸
12…モータ(駆動手段)
13…駆動ねじ部(第1の雄ねじ部)
15…従動ねじ部(第2の雄ねじ部)
16…スライダー
17…被駆動部材
Claims (5)
- 第1の雄ねじ部を設けた回転自在な第1の軸と、
この第1の軸と平行に設けた回転自在な第2の軸と、
この第2の軸に対して周方向の回転は拘束され、軸方向の移動は許容された状態で前記第1の軸の雄ねじ部に係合され、かつ前記第1の雄ねじ部とピッチ及びリードが同じでねじれ方向が異なる第2の雄ねじ部と、
前記第1の軸と第2の軸を回転させる駆動手段とからなり、
前記駆動手段によって前記第1の軸と第2の軸に回転数比を与えた状態でリードの進み方向が同方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードと第2の雄ねじ部の回転によるリードの差により第2の雄ねじ部を第2の軸の軸方向に微少送りし、
前記第1の軸と第2の軸をリードに進む方向が逆方向になる回転を付与することにより、前記第1の雄ねじ部の回転によるリードに対し第2の雄ねじ部の回転によるリードが加算され、第2の雄ねじ部を第2の軸の軸方向に早送りすることを特徴とする微少・早送り装置。 - 前記第2の軸は、その軸方向にキー溝を有しており、第2の雄ねじ部が前記キー溝と係合して第2の軸に対して回転不能で、かつ軸方向に移動自在に嵌合されていることを特徴とする請求項1に記載の微少・早送り装置。
- 前記駆動手段は、前記第1及び第2の軸の軸端部に設けられたモータであることを特徴とする請求項1記載の微少・早送り装置。
- 前記駆動手段は、前記第1及び第2の軸の一方の軸端部に設けられたモータと、他方の軸端部に設けられたアイドルギヤを含むギヤであることを特徴とする請求項1記載の微少・早送り装置。
- 前記第2の雄ねじ部には、これと一体的に移動するスライダーを備え、このスライダーは被駆動部材に連動して微少送りすることを特徴とする請求項1に記載の微少・早送り装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002264144A JP2004100838A (ja) | 2002-09-10 | 2002-09-10 | 微少・早送り装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002264144A JP2004100838A (ja) | 2002-09-10 | 2002-09-10 | 微少・早送り装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004100838A true JP2004100838A (ja) | 2004-04-02 |
Family
ID=32263663
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002264144A Pending JP2004100838A (ja) | 2002-09-10 | 2002-09-10 | 微少・早送り装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004100838A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7967784B2 (en) | 2004-02-18 | 2011-06-28 | Ares Trading S.A. | Hand-held electronically controlled injection device for injecting liquid medications |
| CN107339791A (zh) * | 2017-07-25 | 2017-11-10 | 广东美的制冷设备有限公司 | 百叶驱动装置、空调器的百叶组件和空调器 |
| CN107448571A (zh) * | 2017-08-03 | 2017-12-08 | 合肥新士鑫机械科技有限公司 | 一种可以自动滑动的丝杠导轨 |
| CN110017357A (zh) * | 2019-03-22 | 2019-07-16 | 湖北三江航天万峰科技发展有限公司 | 一种手自一体直线运动机构及手自一体操作方法 |
| CN111022585A (zh) * | 2019-12-09 | 2020-04-17 | 薛春红 | 一种多功能一机式双向旋转驱动装置 |
| CN113134133A (zh) * | 2021-03-29 | 2021-07-20 | 何金龙 | 一种肝癌血管性介入治疗穿刺设备 |
| CN114761064A (zh) * | 2019-11-25 | 2022-07-15 | 富陆凯米有限责任公司 | 具有鼻窦粘液去除功能的双体给药装置 |
-
2002
- 2002-09-10 JP JP2002264144A patent/JP2004100838A/ja active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7967784B2 (en) | 2004-02-18 | 2011-06-28 | Ares Trading S.A. | Hand-held electronically controlled injection device for injecting liquid medications |
| CN107339791A (zh) * | 2017-07-25 | 2017-11-10 | 广东美的制冷设备有限公司 | 百叶驱动装置、空调器的百叶组件和空调器 |
| CN107448571A (zh) * | 2017-08-03 | 2017-12-08 | 合肥新士鑫机械科技有限公司 | 一种可以自动滑动的丝杠导轨 |
| CN107448571B (zh) * | 2017-08-03 | 2019-10-25 | 温州如剑环保科技有限公司 | 一种可以自动滑动的丝杠导轨 |
| CN110017357A (zh) * | 2019-03-22 | 2019-07-16 | 湖北三江航天万峰科技发展有限公司 | 一种手自一体直线运动机构及手自一体操作方法 |
| CN114761064A (zh) * | 2019-11-25 | 2022-07-15 | 富陆凯米有限责任公司 | 具有鼻窦粘液去除功能的双体给药装置 |
| CN111022585A (zh) * | 2019-12-09 | 2020-04-17 | 薛春红 | 一种多功能一机式双向旋转驱动装置 |
| CN113134133A (zh) * | 2021-03-29 | 2021-07-20 | 何金龙 | 一种肝癌血管性介入治疗穿刺设备 |
| CN113134133B (zh) * | 2021-03-29 | 2022-09-09 | 何金龙 | 一种肝癌血管性介入治疗穿刺设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113543823B (zh) | 药物输注装置 | |
| JP5183499B2 (ja) | 注射装置 | |
| JP6075290B2 (ja) | 輸液ポンプ | |
| CN105662589B (zh) | 主从微创血管介入手术机器人从端及其控制方法 | |
| CN111973276A (zh) | 一种介入手术机器人从手端送管装置 | |
| JP2004100838A (ja) | 微少・早送り装置 | |
| HUP0500033A2 (hu) | Gyógyászati injekciós eszköz tengelyirányban eltolható vezérorsóval | |
| JPS6119325A (ja) | 射出成形機におけるスクリユ−回転・射出機構 | |
| CN101391377A (zh) | 双驱动数控旋转工作台传动机构 | |
| EP3233156A1 (en) | Compact medical infusion pumps | |
| CN108555927B (zh) | 柱状丝、管或线的连续操作分离式模块及传输装置 | |
| CN108331731B (zh) | 流体输送装置 | |
| JP2004100839A (ja) | 微少・早送り装置 | |
| CN205459038U (zh) | 主从微创血管介入手术机器人从端 | |
| CN106969095A (zh) | 双螺杆结构的涡轮蜗杆传动装置 | |
| CN219614580U (zh) | 一种驱动装置及药物注入设备 | |
| JPH03213753A (ja) | ボールねじスプラインユニット | |
| TWI426164B (zh) | 用於鈕釦輸送之同步進給定位裝置 | |
| CN201988897U (zh) | 一种分合机构 | |
| CN223890370U (zh) | 一种螺杆推进机构、注射设备及注塑机 | |
| CN120078504B (zh) | 杆状件的操作装置 | |
| CN222195634U (zh) | 一种微量注射泵的推进装置 | |
| CN103182114A (zh) | 注射泵推进装置及注射泵 | |
| JPS61236443A (ja) | テ−ブル移送装置 | |
| CN116373296A (zh) | 一种注射器控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061205 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070403 |