JP2004108575A - 駆動力伝達装置及びそのアンバランス確認方法 - Google Patents
駆動力伝達装置及びそのアンバランス確認方法 Download PDFInfo
- Publication number
- JP2004108575A JP2004108575A JP2003282747A JP2003282747A JP2004108575A JP 2004108575 A JP2004108575 A JP 2004108575A JP 2003282747 A JP2003282747 A JP 2003282747A JP 2003282747 A JP2003282747 A JP 2003282747A JP 2004108575 A JP2004108575 A JP 2004108575A
- Authority
- JP
- Japan
- Prior art keywords
- cam body
- main
- pilot
- clutch
- cam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 6
- 230000007246 mechanism Effects 0.000 claims abstract description 96
- 230000005540 biological transmission Effects 0.000 claims description 50
- 230000001105 regulatory effect Effects 0.000 claims description 4
- 230000002093 peripheral effect Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 6
- 230000002411 adverse Effects 0.000 description 4
- 239000003921 oil Substances 0.000 description 4
- 238000005096 rolling process Methods 0.000 description 4
- 238000003825 pressing Methods 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000010687 lubricating oil Substances 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 230000001629 suppression Effects 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images













Landscapes
- Arrangement And Mounting Of Devices That Control Transmission Of Motive Force (AREA)
- Mechanical Operated Clutches (AREA)
Abstract
【解決手段】パイロット摩擦クラッチ26を接続する電磁式クラッチ機構の作動時にメイン摩擦クラッチを接続するカム機構23は、相対回転し得るパイロットカム体32とメインカム体31とストッパ体33とを備え、電磁式クラッチ機構の作動時に第一回転部材と第二回転部材との間の相対回転に伴いパイロット摩擦クラッチ26を介してパイロットカム体32に発生するトルクに応じてメインカム体31に発生する回転中心線方向の推力によりメイン摩擦クラッチを接続する状態と、電磁式クラッチ機構の非作動時にもパイロットカム体32に生じ得るトルクに対しストッパ体33が捩じりばね34で生じる回転方向の付勢力により対抗してメインカム体31に回転中心線方向の推力が発生するのを抑制する状態とを取る。
【選択図】図3
Description
電磁式クラッチ機構24で電磁石27に通電されると、アーマチュア25が電磁石27により吸引されてパイロット摩擦クラッチ26が摩擦接触する。そして、アウタケース14とインナケース17との間に相対回転が発生すると、例えば、前進駆動時には図15(b)に示す向きのトルクTがパイロットカム体32に発生し、後進駆動時やエンジンブレーキ時には図15(c)に示す向きのトルクTがパイロットカム体32に発生する。いずれの駆動状態でも、カム機構23(メインカム体31、球状カム体38、パイロットカム体32)で増幅されたトルクTが回転中心線14a,17a方向の推力Sに変換される。その推力Sに応じて、メイン摩擦クラッチ22が接続され、アウタケース14とインナケース17との間で駆動力の伝達が行われる。
なお、下記特許文献1も参照されたい。
* 請求項1〜4の発明(第一実施形態及び第二実施形態に対応)
請求項1の発明に係る駆動力伝達装置(1)は下記のように構成されている。
この駆動力伝達装置(1)は、相対回転し得る第一回転部材(12)と第二回転部材(15)との間の駆動力の伝達を行なうメインクラッチ(22)と、パイロットクラッチ(26)を作動するクラッチ機構(24)と、このパイロットクラッチ(26)を接続するクラッチ機構(24)の作動時にこのメインクラッチ(22)を接続するカム機構(23)とを備えている。このカム機構(23)は、相対回転し得るパイロットカム体(32)とメインカム体(31)とストッパ体(33)と、このパイロットカム体(32)及びメインカム体(31)とこのストッパ体(33)とをそれらの係止部(41,42,43,44)で互いに係止させる回転方向(R)へストッパ体(33)を付勢する付勢手段(34)とを備えている。前記クラッチ機構(24)の作動時に第一回転部材(12)と第二回転部材(15)との間の相対回転に伴いパイロットクラッチ(26)を介してパイロットカム体(32)に発生するトルク(T)に応じてメインカム体(31)に発生する回転中心線(14a,17a)方向の推力(S)により前記メインクラッチ(22)を接続する状態(P)と、前記クラッチ機構(24)の非作動時にもパイロットカム体(32)に生じ得るトルク(引き摺りトルクt)に対し前記ストッパ体(33)が前記付勢手段(34)の付勢力(E)で対抗してメインカム体(31)に回転中心線(14a,17a)方向の推力(S)が発生するのを抑制する状態(Q)とを取る。
前記ストッパ体(33)には前記メインカム体(31)と前記パイロットカム体(32)とに係合してこのメインカム体(31)とパイロットカム体(32)の一方向の相対回転を規制する係止部(41,42)を備えている。前記付勢手段(34)はこのストッパ体(33)の係止部(41)とこのメインカム体(31)とを係合させる方向に付勢する。
この駆動力伝達装置(1)は、相対回転し得る第一回転部材(12)と第二回転部材(15)との間の駆動力の伝達を行なうメインクラッチ(22)と、パイロットクラッチ(26)を作動するクラッチ機構(24)と、このパイロットクラッチ(26)を接続するクラッチ機構(24)の作動時にこのメインクラッチ(22)を接続するカム機構(23)とを備えている。このカム機構(23)は、相対回転し得るパイロットカム体(32)とメインカム体(31)とストッパ体(33)と、このパイロットカム体(32)及びメインカム体(31)とこのストッパ体(33)とをそれらの係止部(41,42,43,44)で互いに係止させる回転方向(R)へストッパ体(33)を付勢する付勢手段(34)とを備えている。前記第一回転部材(12)と第二回転部材(15)との間の一方向の相対回転時には、その相対回転に伴いパイロットクラッチ(26)を介してパイロットカム体(32)に発生するトルク(T)に応じてメインカム体(31)に発生する回転中心線(14a,17a)方向の推力(S)により前記メインクラッチ(22)を接続する。前記第一回転部材(12)と第二回転部材(15)との間の他方向の相対回転時には、前記付勢手段(34)による付勢力(E)で相対回転を規制して前記メインカム体(31)に発生する回転中心線(14a,17a)方向の推力(S)を抑制する。
* カム機構(23)においてパイロットカム体(32)に生じるトルク(引き摺りトルクt)がメインカム体(31)の推力(S)として変換される前に、付勢手段(34)によりストッパ体(33)に生じる付勢力(E)がこのパイロットカム体(32)のトルク(引き摺りトルクt)に対抗するため、その推力(S)をパイロットカム体(32)及びメインカム体(31)が受けることを抑制する。また、この付勢手段(34)はストッパ体(33)を回転方向(R)へ付勢する付勢力(E)を有しているため、パイロットカム体(32)及びメインカム体(31)がこの付勢手段(34)により回転中心線(14a,17a)方向の付勢力を受けない。さらに、制御の安定性をより一層増すために従来技術と同様なリターンスプリング(48)を付設したとしても、パイロットカム体(32)のトルク(引き摺りトルクt)に対抗する機能は前記ストッパ体(33)が果たすので、そのリターンスプリング(48)としては弾性力の小さいものを採用することができる。従って、このリターンスプリング(48)の有無に関係なく、このパイロットカム体(32)及びメインカム体(31)における回転抵抗(摩擦抵抗)を軽減させることができる。
請求項5の発明に係る駆動力伝達装置(1)は下記のように構成されている。
この駆動力伝達装置(1)は、相対回転し得る第一回転部材(12)と第二回転部材(15)との間の駆動力の伝達を行なうメインクラッチ(22)と、パイロットクラッチ(26)を作動するクラッチ機構(24)と、このパイロットクラッチ(26)を接続するクラッチ機構(24)の作動時にこのメインクラッチ(22)を接続するカム機構(23)とを備えている。前記メインクラッチ(22)は、摩擦クラッチであって、その接触面間の間隔が最大値になる非接続状態と、その接触面が近接して伝達される駆動力が大きくなり始める接続開始状態と、その接触面間の間隔が最小値になる接続状態と、これら各状態の中間の状態とを取る。前記カム機構(23)においてパイロットカム体(32)とメインカム体(31)とには連動体(38)を挟持するカム面(36,37)を設けている。パイロットカム体(32)のカム面(37)及びメインカム体(31)のカム面(36)は、それぞれ、メインクラッチ(22)を前記非接続状態から前記接続開始状態にする第一段階のカム面(50,54)と、メインクラッチ(22)を前記接続開始状態から前記接続状態にする第二段階のカム面(52,56)とに区分されている。
前記カム機構(23)においてメインカム体(31)が第一回転部材(12)及び第二回転部材(15)に対し相対回転可能に且つ回転中心線(14a,17a)方向へ移動可能に支持されている。パイロットカム体(32)のカム面(37)において回転方向(R)に対する傾斜角度については、第二段階のカム面(56)の傾斜角度(θ56)よりも第一段階のカム面(54)の傾斜角度(θ54)を大きく設定している。メインカム体(31)のカム面(36)において回転方向(R)に対する傾斜角度については、第二段階のカム面(52)の傾斜角度(θ52)よりも第一段階のカム面(50)の傾斜角度(θ50)を大きく設定している。
請求項1から請求項6のうちいずれかの請求項の発明を前提とする請求項7の発明に係るカム機構(23)においては、パイロットカム体(32)に発生するトルク(T,t)に応じてメインカム体(31)に発生する回転中心線(14a,17a)方向の推力(S)に対抗するようにメインカム体(31)を付勢するリターンスプリング(48)を付設した。
請求項8の発明は、請求項1から請求項7のうちいずれかの請求項の発明を前提として下記のように構成されている。
請求項8の発明を前提とする請求項9の発明においては、前記メインカム体(31)に対し前記ストッパ体(33)及び捩じりばね(34)を組み付けるとともに、このストッパ体(33)がメインカム体(31)に対し回転中心線(14a,17a)方向へ移動するのを規制する規制体(例えばスナップリング45)をこのメインカム体(31)に取り付けて、このストッパ体(33)と捩じりばね(34)と規制体(45)とがこのメインカム体(31)とともに回転中心線(14a,17a)方向へ一体的に移動し得る。
請求項9の発明を前提とする請求項10の発明においては、前記メインカム体(31)には前記捩じりばね(34)の一端部(40a)がこの捩じりばね(34)の弾性力(E)に抗して圧接される係止部(61)を設けるとともに、前記ストッパ体(33)にはこの捩じりばね(34)の他端部(40b)が捩じりばね(34)の弾性力(E)に抗して圧接される係止部(62)を設け、このメインカム体(31)にはメインカム体(31)の係止部(61)に捩じりばね(34)の一端部(40a)を支持した状態で捩じりばね(34)の他端部(40b)に対応する開口部(63)を設けた。
請求項11の発明は、相対回転し得る第一回転部材(12)と第二回転部材(15)との間の駆動力の伝達を行なうメイン摩擦クラッチ(22)と、パイロット摩擦クラッチ(26)を作動する電磁式クラッチ機構(24)と、このパイロット摩擦クラッチ(26)を接続する電磁式クラッチ機構(24)の作動時にこのメインク摩擦ラッチ(22)を接続するカム機構(23)とを備えた駆動力伝達装置(1)、例えば請求項1〜11の発明にかかる駆動力伝達装置(1)について、アンバランスを確認する方法であり、そのアンバランス確認を行う際、第一回転部材(12)と第二回転部材(15)とを回転可能に支持した状態で、電磁式クラッチ機構(24)の電磁石(27)または電磁石代用部品を通電状態にする。
第12の発明は、請求項6の発明を前提として下記のように構成されている。
メインカム体(31)のカム面(36)は、回転方向(R)に対し傾斜する第一カム面(36a)と、回転方向(R)に対し傾斜するとともにこの第一カム面(36a)の傾斜方向とは逆の傾斜方向である第二カム面(36b)とを有している。パイロットカム体(32)のカム面(37)も、回転方向(R)に対し傾斜する第一カム面(37a)と、回転方向(R)に対し傾斜するとともにこの第一カム面(37a)の傾斜方向とは逆の傾斜方向である第二カム面(37b)とを有している。メインカム体(31)のカム面(36)の第一カム面(36a)とパイロットカム体(32)のカム面(37)の第一カム面(37a)とは、カム体(38)を挟んで相対向している。メインカム体(31)のカム面(36)の第二カム面(36b)とパイロットカム体(32)のカム面(37)の第二カム面(37b)とは、カム体(38)を挟んで相対向している。メインカム体(31)のカム面(36)の第一カム面(36a)及び第二カム面(36b)と、パイロットカム体(32)のカム面(37)の第一カム面(37a)及び第二カム面(37b)とにおいて、それぞれ、第一段階の圧接面(50,54)と第二段階の圧接面(52,56)とを設けた。
まず、本発明の第一実施形態にかかる駆動力伝達装置について図1〜7を参照して説明する。
次に、本発明の第二実施形態にかかる駆動力伝達装置について図8〜14を参照して説明する。この第二実施形態は、第一実施形態と比較して下記*の点で主に相違する。なお、第一実施形態の図2、図3、図4及び図5,6,7は、それぞれ、第二実施形態の図8、図10、図11及び図12,13,14に対応する。
このリターンスプリング48は、皿ばねであって、メインカム体31の内側でインナケース17の外周部に挿嵌され、このメインカム体31に圧接されている。電磁石27の非通電時、リターンスプリング48の弾性力によりメインカム体31が回転中心線14a,17aに平行な向きにパイロットカム体32方向へ付勢され、このメインカム体31によりパイロットカム体32が球状カム体38を介して押され、リヤハウジング19で支えられたニードルベアリング35にパイロットカム体32が圧接される。
メインカム体31のカム面36は、回転方向Rに対し傾斜する円弧状の第一カム面36aと、回転方向Rに対し傾斜するとともにこの第一カム面36aの傾斜方向とは逆の傾斜方向である円弧状の第二カム面36bとを有している。パイロットカム体32のカム面37も、回転方向Rに対し傾斜する円弧状の第一カム面37aと、回転方向Rに対し傾斜するとともにこの第一カム面37aの傾斜方向とは逆の傾斜方向である円弧状の第二カム面37bとを有している。
* メインカム体31に対するストッパ体33及び捩じりばね34の組付け
メインカム体31は、インナケース17が挿入されたボス壁部57と、このボス壁部57の外周部から半径方向へ延びる端壁部58と、この端壁部58の外周部でボス壁部57に面して突設された外周壁部59と、この外周壁部59とボス壁部57との間に形成された収容室60とを備えている。ストッパ体33及び捩じりばね34は、メインカム体31の収容室60に嵌め込まれ、メインカム体31に対し相対回転可能に且つ回転中心線14a,17a方向へ移動可能に組み付けられている。捩じりばね34はメインカム体31の端壁部58とストッパ体33との間に挟まれている。メインカム体31の外周壁部59には穴用スナップリング45(規制体)が嵌め込まれている。このスナップリング45は、ストッパ体33及び捩じりばね34をメインカム体31の端壁部58との間で挟んで、ストッパ体33及び捩じりばね34がメインカム体31に対し回転中心線14a,17a方向へ移動するのを規制する。このストッパ体33と捩じりばね34とスナップリング45とはメインカム体31とともに回転中心線14a,17a方向へ一体的に移動し得る。なお、各カム面36及び係止突起43はメインカム体31のボス壁部57に形成されている。以上の点は第一実施形態の場合も同様である。
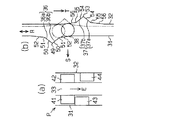
駆動力伝達装置1のアンバランス確認を行う際、まず、二点鎖線で示す治具64により、第一回転部材12と第二回転部材15とを回転可能に支持する。次に、その支持状態で、第一回転部材12と第二回転部材15とを相対回転させるとともに、電磁式クラッチ機構24の電磁石27または電磁石代用部品を通電状態にして、駆動力伝達装置1にトルクを発生させる。すなわち、パイロット摩擦クラッチ26、メイン摩擦クラッチ22、カム機構23を構成する各部材の位置的自由度を制限した状態で、駆動力伝達装置1のアンバランスを確認する。なお、電磁石代用部品とは、例えば永久磁石の磁力によりパイロット摩擦クラッチ26を接続状態にするテスト用の部品である。
Claims (11)
- 相対回転し得る第一回転部材と第二回転部材との間の駆動力の伝達を行なうメインクラッチと、パイロットクラッチを作動するクラッチ機構と、このパイロットクラッチを接続するクラッチ機構の作動時にこのメインクラッチを接続するカム機構とを備えた駆動力伝達装置において、
このカム機構は、相対回転し得るパイロットカム体とメインカム体とストッパ体と、このパイロットカム体及びメインカム体とこのストッパ体とを互いに係止させる回転方向へストッパ体を付勢する付勢手段とを備え、
この付勢手段によりストッパ体に生じる付勢力とこのパイロットカム体に生じるトルクとの間の力関係に応じてパイロットカム体とメインカム体とストッパ体における回転方向の位置を設定し得る
ことを特徴とする駆動力伝達装置。 - 相対回転し得る第一回転部材と第二回転部材との間の駆動力の伝達を行なうメインクラッチと、パイロットクラッチを作動するクラッチ機構と、このパイロットクラッチを接続するクラッチ機構の作動時にこのメインクラッチを接続するカム機構とを備えた駆動力伝達装置において、
このカム機構は、相対回転し得るパイロットカム体とメインカム体とストッパ体と、このパイロットカム体及びメインカム体とこのストッパ体とを互いに係止させる回転方向へストッパ体を付勢する付勢手段とを備え、
前記クラッチ機構の作動時に第一回転部材と第二回転部材との間の相対回転に伴いパイロットクラッチを介してパイロットカム体に発生するトルクに応じてメインカム体に発生する回転中心線方向の推力により前記メインクラッチを接続する状態と、前記クラッチ機構の非作動時にもパイロットカム体に生じ得るトルクに対し前記ストッパ体が前記付勢手段の付勢力で対抗してメインカム体に回転中心線方向の推力が発生するのを抑制する状態とを取る
ことを特徴とする駆動力伝達装置。 - 前記ストッパ体には前記メインカム体と前記パイロットカム体とに係合してこのメインカム体とパイロットカム体の一方向の相対回転を規制する係止部を備え、前記付勢手段はこのストッパ体の係止部とこのメインカム体とを係合させる方向に付勢することを特徴とする請求項1または請求項2に記載の駆動力伝達装置。
- 相対回転し得る第一回転部材と第二回転部材との間の駆動力の伝達を行なうメインクラッチと、パイロットクラッチを作動するクラッチ機構と、このパイロットクラッチを接続するクラッチ機構の作動時にこのメインクラッチを接続するカム機構とを備えた駆動力伝達装置において、
このカム機構は、相対回転し得るパイロットカム体とメインカム体とストッパ体と、このパイロットカム体及びメインカム体とこのストッパ体とを互いに係止させる回転方向へストッパ体を付勢する付勢手段とを備え、
前記第一回転部材と第二回転部材との間の一方向の相対回転時には、その相対回転に伴いパイロットクラッチを介してパイロットカム体に発生するトルクに応じてメインカム体に発生する回転中心線方向の推力により前記メインクラッチを接続し、前記第一回転部材と第二回転部材との間の他方向の相対回転時には、前記付勢手段による付勢力で相対回転を規制して前記メインカム体に発生する回転中心線方向の推力を抑制する
ことを特徴とする駆動力伝達装置。 - 相対回転し得る第一回転部材と第二回転部材との間の駆動力の伝達を行なうメインクラッチと、パイロットクラッチを作動するクラッチ機構と、このパイロットクラッチを接続するクラッチ機構の作動時にこのメインクラッチを接続するカム機構とを備えた駆動力伝達装置において、
前記メインクラッチは、摩擦クラッチであって、その接触面間の間隔が最大値になる非接続状態と、その接触面が近接して伝達される駆動力が大きくなり始める接続開始状態と、その接触面間の間隔が最小値になる接続状態と、これら各状態の中間の状態とを取り、
前記カム機構においてパイロットカム体とメインカム体とには連動体を挟持するカム面を設け、パイロットカム体のカム面及びメインカム体のカム面は、それぞれ、メインクラッチを前記非接続状態から前記接続開始状態にする第一段階の圧接面と、メインクラッチを前記接続開始状態から前記接続状態にする第二段階の圧接面とに区分されている
ことを特徴とする駆動力伝達装置。 - 前記カム機構においてメインカム体が第一回転部材及び第二回転部材に対し相対回転可能に且つ回転中心線方向へ移動可能に支持され、
パイロットカム体のカム面において回転方向に対する傾斜角度については、第二段階の圧接面の傾斜角度よりも第一段階の圧接面の傾斜角度を大きく設定し、
メインカム体のカム面において回転方向に対する傾斜角度については、第二段階の圧接面の傾斜角度よりも第一段階の圧接面の傾斜角度を大きく設定した
ことを特徴とする請求項5に記載の駆動力伝達装置。 - 前記カム機構においては、パイロットカム体に発生するトルクに応じてメインカム体に発生する回転中心線方向の推力に対抗するようにメインカム体を付勢するリターンスプリングを付設したことを特徴とする請求項1から請求項6のうちいずれかの請求項に記載の駆動力伝達装置。
- 前記付勢手段は捩じりばねであり、この捩じりばねの一端部を前記メインカム体に支持するとともに、この捩じりばねの他端部を前記ストッパ体に支持することを特徴とする請求項1から請求項7のうちいずれかの請求項に記載の駆動力伝達装置。
- 前記メインカム体に対し前記ストッパ体及び捩じりばねを組み付けるとともに、このストッパ体がメインカム体に対し回転中心線方向へ移動するのを規制する規制体をこのメインカム体に取り付けて、このストッパ体と捩じりばねと規制体とがこのメインカム体とともに回転中心線方向へ一体的に移動し得ることを特徴とする請求項8に記載の駆動力伝達装置。
- 前記メインカム体には前記捩じりばねの一端部がこの捩じりばねの弾性力に抗して圧接される係止部を設けるとともに、前記ストッパ体にはこの捩じりばねの他端部が捩じりばねの弾性力に抗して圧接される係止部を設け、このメインカム体にはメインカム体の係止部に捩じりばねの一端部を支持した状態で捩じりばねの他端部に対応する開口部を設けたことを特徴とする請求項9に記載の駆動力伝達装置。
- 相対回転し得る第一回転部材と第二回転部材との間の駆動力の伝達を行なうメイン摩擦クラッチと、パイロット摩擦クラッチを作動する電磁式クラッチ機構と、このパイロット摩擦クラッチを接続する電磁式クラッチ機構の作動時にこのメイン摩擦ラッチを接続するカム機構とを備えた駆動力伝達装置について、アンバランス確認を行う際、第一回転部材と第二回転部材とを回転可能に支持した状態で、電磁式クラッチ機構の電磁石または電磁石代用部品を通電状態にすることを特徴とする駆動力伝達装置のアンバランス確認方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003282747A JP4200853B2 (ja) | 2002-08-30 | 2003-07-30 | 駆動力伝達装置及びそのアンバランス確認方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002252764 | 2002-08-30 | ||
| JP2003282747A JP4200853B2 (ja) | 2002-08-30 | 2003-07-30 | 駆動力伝達装置及びそのアンバランス確認方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004108575A true JP2004108575A (ja) | 2004-04-08 |
| JP4200853B2 JP4200853B2 (ja) | 2008-12-24 |
Family
ID=32301319
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003282747A Expired - Fee Related JP4200853B2 (ja) | 2002-08-30 | 2003-07-30 | 駆動力伝達装置及びそのアンバランス確認方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4200853B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006046399A (ja) * | 2004-08-02 | 2006-02-16 | Toyoda Mach Works Ltd | 駆動力伝達装置 |
| JP2007132517A (ja) * | 2005-11-08 | 2007-05-31 | Gkn Driveline Internatl Gmbh | ボール溝の勾配が変化するボールランプ装置 |
| JP2008023719A (ja) * | 2006-07-18 | 2008-02-07 | Mitsubishi Polyester Film Copp | 反射防止フィルム用積層ポリエステルフィルム |
| JP2008039416A (ja) * | 2006-08-01 | 2008-02-21 | Jtekt Corp | 駆動力伝達装置の試験方法及び製造方法 |
| JP2009197955A (ja) * | 2008-02-25 | 2009-09-03 | Univance Corp | 四輪駆動車用駆動力伝達装置 |
| EP2105336A2 (en) | 2008-03-13 | 2009-09-30 | Univance Corporation | Driving force transmission device for four-wheel-drive vehicle |
| US8151958B2 (en) | 2006-09-29 | 2012-04-10 | Jtekt Corporation | Power transmitting device |
| JP2012072892A (ja) * | 2010-08-30 | 2012-04-12 | Jtekt Corp | 駆動力伝達装置及び車両 |
| JP2013509542A (ja) * | 2009-10-29 | 2013-03-14 | シェフラー テクノロジーズ アクチエンゲゼルシャフト ウント コンパニー コマンディートゲゼルシャフト | パイロットクラッチとメインクラッチとを備えたクラッチ |
-
2003
- 2003-07-30 JP JP2003282747A patent/JP4200853B2/ja not_active Expired - Fee Related
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006046399A (ja) * | 2004-08-02 | 2006-02-16 | Toyoda Mach Works Ltd | 駆動力伝達装置 |
| JP2007132517A (ja) * | 2005-11-08 | 2007-05-31 | Gkn Driveline Internatl Gmbh | ボール溝の勾配が変化するボールランプ装置 |
| JP2008023719A (ja) * | 2006-07-18 | 2008-02-07 | Mitsubishi Polyester Film Copp | 反射防止フィルム用積層ポリエステルフィルム |
| JP2008039416A (ja) * | 2006-08-01 | 2008-02-21 | Jtekt Corp | 駆動力伝達装置の試験方法及び製造方法 |
| US8151958B2 (en) | 2006-09-29 | 2012-04-10 | Jtekt Corporation | Power transmitting device |
| JP2009197955A (ja) * | 2008-02-25 | 2009-09-03 | Univance Corp | 四輪駆動車用駆動力伝達装置 |
| EP2105336A2 (en) | 2008-03-13 | 2009-09-30 | Univance Corporation | Driving force transmission device for four-wheel-drive vehicle |
| JP2009220593A (ja) * | 2008-03-13 | 2009-10-01 | Univance Corp | 四輪駆動車用駆動力伝達装置 |
| EP2105336A3 (en) * | 2008-03-13 | 2013-03-06 | Univance Corporation | Driving force transmission device for four-wheel-drive vehicle |
| JP2013509542A (ja) * | 2009-10-29 | 2013-03-14 | シェフラー テクノロジーズ アクチエンゲゼルシャフト ウント コンパニー コマンディートゲゼルシャフト | パイロットクラッチとメインクラッチとを備えたクラッチ |
| JP2012072892A (ja) * | 2010-08-30 | 2012-04-12 | Jtekt Corp | 駆動力伝達装置及び車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4200853B2 (ja) | 2008-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN119173701B (zh) | 可控离合器组件 | |
| JP7270555B2 (ja) | 自己励磁の電磁脱着アクチュエータ | |
| EP3926197A1 (en) | Power transmitting clutch and disconnect | |
| CN105308838B (zh) | 电磁促动器 | |
| JP2006105219A (ja) | 連結装置 | |
| JP2004108575A (ja) | 駆動力伝達装置及びそのアンバランス確認方法 | |
| US11065957B2 (en) | Drive power connecting/disconnecting device | |
| JP2018141549A (ja) | 差動装置 | |
| EP1394437B1 (en) | Electromagnetic clutch | |
| JP2007517732A (ja) | 四輪駆動システム | |
| JP2005325908A (ja) | 回転伝達装置 | |
| CN113661339A (zh) | 提供四种操作模式的旋转电离合器组件 | |
| JP3597383B2 (ja) | 回転伝達装置 | |
| JP2012062937A (ja) | 電磁クラッチ及びこれを備えた駆動力伝達装置 | |
| JP2006189149A (ja) | デファレンシャル装置 | |
| JP3306342B2 (ja) | 駆動力伝達装置 | |
| JP3815964B2 (ja) | カップリング装置 | |
| JP2015129574A (ja) | 駆動力伝達装置及び電磁クラッチ | |
| JP2001018678A (ja) | ハブクラッチ | |
| JP4541178B2 (ja) | 回転伝達装置 | |
| JP2767430B2 (ja) | 電磁クラッチ機構 | |
| JP4244882B2 (ja) | 電磁式作動機構を備えた駆動力伝達装置 | |
| JP2006090534A (ja) | 連結装置 | |
| JP2004239311A (ja) | 摩擦クラッチ | |
| JP5310133B2 (ja) | 駆動力伝達装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050629 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20060301 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080314 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080916 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080929 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4200853 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111017 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111017 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121017 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131017 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |