JP2004109565A - 標本観察システム及び標本観察システムの調整方法 - Google Patents
標本観察システム及び標本観察システムの調整方法 Download PDFInfo
- Publication number
- JP2004109565A JP2004109565A JP2002272697A JP2002272697A JP2004109565A JP 2004109565 A JP2004109565 A JP 2004109565A JP 2002272697 A JP2002272697 A JP 2002272697A JP 2002272697 A JP2002272697 A JP 2002272697A JP 2004109565 A JP2004109565 A JP 2004109565A
- Authority
- JP
- Japan
- Prior art keywords
- laser light
- laser
- image
- laser beam
- conversion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims abstract description 111
- 230000001678 irradiating effect Effects 0.000 claims abstract description 25
- 238000006243 chemical reaction Methods 0.000 claims description 65
- 238000003384 imaging method Methods 0.000 claims description 46
- 238000001514 detection method Methods 0.000 claims description 13
- 230000003111 delayed effect Effects 0.000 claims description 4
- 238000005259 measurement Methods 0.000 abstract description 12
- 238000012545 processing Methods 0.000 description 107
- 230000003287 optical effect Effects 0.000 description 82
- 230000008569 process Effects 0.000 description 58
- 238000006073 displacement reaction Methods 0.000 description 18
- 230000006870 function Effects 0.000 description 17
- 238000012937 correction Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 14
- 230000008859 change Effects 0.000 description 9
- 230000000694 effects Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 238000002474 experimental method Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 238000005562 fading Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000004061 bleaching Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images
















Landscapes
- Mechanical Optical Scanning Systems (AREA)
- Microscoopes, Condenser (AREA)
Abstract
【課題】標本が表されている画像の画像上の位置とその標本に照射するレーザの照射位置とのずれを低減させる調整手法を提供する。
【解決手段】標本1の像が表されている画像を取得する画像取得部を有する画像取得装置6と、標本1にレーザ光を照射するレーザ光照射部を有するレーザ光走査装置7とを備えている標本観察システムにおいて、レーザ光照射部によって照射されたレーザ光の照射位置を画像取得部6で取得された画像から測定し、この測定により得られた照射位置とレーザ光照射部に対して指示されたレーザ光照射の照射指示位置との差異を示す情報に基づいて、レーザ光照射部の照射位置を校正する。
【選択図】 図1
【解決手段】標本1の像が表されている画像を取得する画像取得部を有する画像取得装置6と、標本1にレーザ光を照射するレーザ光照射部を有するレーザ光走査装置7とを備えている標本観察システムにおいて、レーザ光照射部によって照射されたレーザ光の照射位置を画像取得部6で取得された画像から測定し、この測定により得られた照射位置とレーザ光照射部に対して指示されたレーザ光照射の照射指示位置との差異を示す情報に基づいて、レーザ光照射部の照射位置を校正する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、標本の像が表されている画像を取得する画像取得装置で用いられる技術に関し、特に、画像取得装置で取得される画像の画像上における位置と、該標本に照射するレーザ光の照射位置とのずれを低減させる技術に関する。
【0002】
【従来の技術】
従来、標本の像が表されている画像を取得する画像取得装置で取得される画像の画像の画像上における位置と、標本にレーザ光を照射するレーザ走査装置におけるレーザ光の照射位置とのずれを低減させる技術として、2つの装置の組み付け精度のみで光軸のずれを吸収する手法や、特許文献1に開示されている手法、すなわちレーザ走査装置内部にCCD(Charge Coupled Device)撮像素子を配置してそこに投影されたレーザ光の位置によってレーザ走査装置内部で照射位置の校正を行う手法がある。
【0003】
また、複数の画像取得装置で取得された同一の標本が表されている別個の画像を重ね合わせる手法として、特許文献2に開示されている手法の様に、画像の取得後に画像自身を加工する手法がある。
【0004】
【特許文献1】
特開平11−242164号公報
【特許文献2】
特開平11−231223号公報
【0005】
【発明が解決しようとする課題】
上述したような従来技術は、画像取得装置単体あるいはレーザ走査装置単体で光学系の調整が独自に行われているに過ぎないため、両者間の光軸のずれは組み付け精度に依存することとなり、実質的には管理されていない状態にあった。
【0006】
このため、複数の画像取得装置を組み合わせて異なる複数の画像を取得したときには、得られた同一標本の画像を重ね合わせる処理を行うための画像処理手段が必要となる。しかし、このような画像処理は処理量が膨大であり、リアルタイムで重ね合わせ処理をするには大きな処理負担が生じてしまう。
【0007】
また、レーザ走査装置単体の校正を行う場合であっても、特許文献1に開示の手法のように専用の撮像素子が必要となる。しかもこの校正は走査装置単体で独自に行うものであるため他の装置との相関を取ることは考慮されていない。
このように、顕微鏡分野において1つあるいは複数の画像取得装置とレーザ走査装置とを組み合わせたシステムにおいて、画像取得装置で取得される画像上の位置とレーザ走査装置から照射されるレーザの照射位置とをその画像の全領域において一致させる調整手法は確立されていないのが現状である。
【0008】
以上の問題を鑑み、標本が表されている画像の画像上の位置とその標本に照射するレーザの照射位置とのずれを低減させる調整手法を提供することが本発明が解決しようとする課題である。
【0009】
【課題を解決するための手段】
本発明では、画像取得装置からの画像情報上の位置によってレーザ走査装置からのレーザ光の照射位置が規定される装置を提案し、且つレーザ走査装置からのレーザ照射位置と画像取得装置からの画像情報上の位置とを一致きせるための調整手法を提案する。
【0010】
本発明の態様のひとつである標本の観察を行うためのシステムは、前記標本の像が表されている画像を取得する画像取得手段を有する画像取得装置と、前記標本上の位置の指定に応じ、該位置に向けてレーザ光を照射するレーザ光照射手段を有するレーザ光走査装置と、前記レーザ光の照射位置と、前記レーザ光照射手段に対して指定された前記位置との差異を検出する検出手段と、前記レーザ光照射手段に対して指定される前記位置の変換を前記差異に基づいて行い、該変換が施された後の位置を該レーザ光照射手段に対して指定する変換手段と、を備え、前記変換手段は、前記レーザ光照射手段に対して指定される前記変換前の前記位置と、該変換が施された後の位置が指定された該レーザ光照射手段によって照射されるレーザ光の照射位置との前記画像上における差異が、前記検出手段によって検出されていた前記差異よりも少なくなるように前記変換を行うように構成することによって前述した課題を解決する。
【0011】
上記の構成によれば、レーザ光の照射位置を測定する手段として画像取得装置を用いることで専用の測定手段を設けることなく調整を可能とする。また特別な工具を用いることなく所望の調整を行うことができる。
なお、上述した本発明に係る標本観察システムにおいて、前記画像取得装置は、撮像装置またはレーザ走査型顕微鏡であるように構成することができる。
【0012】
また、前述した本発明に係る標本観察システムにおいて、前記変換手段によって行われる変換は、前記レーザ光照射手段に対して指定される前記位置を平行に移動する変換であるように構成することができる。
この構成によれば、画像取得装置とレーザ走査装置との光軸の位置ずれを解消することができるようになる。
【0013】
また、前述した本発明に係る標本観察システムにおいて、前記変換手段によって行われる変換は、前記レーザ光照射手段に対して指定される前記位置の回転変換であるように構成することができる。
この構成によれば、画像取得装置とレーザ走査装置との光軸の回転ずれを解消することができるようになる。
【0014】
また、前述した本発明に係る標本観察システムにおいて、前記変換手段によって行なわれる変換は、前記レーザ光照射手段に対して指定される前記位置の前記画像上における位置と、該画像の中心の位置との間の距離に基づいた変換であるように構成することができる。
【0015】
この構成によれば、画像取得装置とレーザ走査装置との各々の光学系で生じ得る光学ひずみの補償を行うことができるようになる。
また、前述した本発明に係る標本観察システムにおいて、前記レーザ光照射手段は、該レーザ光照射手段によって照射されるレーザ光を前記標本上で走査させる走査手段を更に有し、前記検出手段は、前記走査手段によって走査された前記レーザ光の前記標本上での走査の軌跡上に位置する所定の点と、該レーザ光が該所定の点を照射したときに前記レーザ光照射手段に対して指定されていた前記位置との前記画像上における差異を検出するように構成することができる。
【0016】
この構成によれば、レーザ光を継続して一点に集中させる照射を行うことなく所望の調整を行うことができるようになる。
また、前述した本発明に係る標本観察システムにおいて、前記レーザ光照射手段は、該レーザ光照射手段によって照射されるレーザ光を変調する変調手段と、該レーザ光照射手段によって照射されるレーザ光を前記標本上で走査させる走査手段と、を更に有し、前記走査手段は、該走査手段に入力される信号のレベルに対応する位置に前記レーザ光を照射し、該信号のレベルを変化させることで前記走査を行い、前記検出手段は、前記走査手段に入力されている信号で前記変調手段によって変調された前記レーザ光が該走査手段によって前記標本上を走査するときにおける、該標本上の所定の照射位置が照射される時刻と、前記レーザ光照射手段に対して該所定の照射位置への照射が指定された時刻との時間差を前記差異として検出し、前記変換手段は、前記走査手段に入力されている信号を、前記検出手段によって検出された前記時間差だけ遅延させて前記レーザ光照射手段に与え、前記変調手段は、前記変換手段によって遅延された信号で前記レーザ光を変調するように構成することができる。
【0017】
この構成によれば、画像取得装置あるいはレーザ走査装置自身が持つ測定位置ひずみの補償を行うことができるようになる。
また、前述した本発明に係る標本観察システムにおいて、前記レーザ光照射手段は、前記標本上の範囲の指定に応じ、該レーザ光照射手段によって照射されるレーザ光を該範囲に対して走査させる走査手段を更に有し、前記検出手段は、前記走査手段によって前記レーザ光の走査がされた前記標本上の範囲と、該範囲が走査されたときに前記走査手段に対して指示されていた前記範囲との差異を検出し、前記変換手段は、前記走査手段に対して指定される前記標本上の範囲を、前記検出手段によって検出された前記差異に基づいて拡大して前記レーザ光照射手段に与え、前記走査手段は、前記変換手段によって前記レーザ光照射手段に与えられた前記範囲を前記指定の範囲として前記レーザ光を走査させるように構成することができる。
【0018】
この構成によれば、標本における指定領域へのレーザ光の走査における領域の指定範囲と実際にレーザ光が照射される領域とのずれの補正を行うことができるようになる。
また、本発明の別の態様のひとつである標本観察システムの調整方法は、標本の像が表されている画像を取得する画像取得部を有する画像取得装置と、該標本上の位置の指定に応じ、該位置に向けてレーザ光を照射するレーザ光照射部を有するレーザ光走査装置とを備えている該標本の観察を行うためのシステムの調整方法であって、前記レーザ光の照射位置と、前記レーザ光照射部に対して指定された前記位置との差異の検出を行い、前記差異に基づいて行われる前記レーザ光照射部に対して指定される前記位置の変換であって、該レーザ光照射部に対して指定される該変換前の位置と、該変換が施された後の位置が指定された該レーザ光照射部によって照射されるレーザ光の照射位置との前記画像上における差異が、前記検出によって検出されていた差異よりも少なくなるような該変換を行い、前記変換が施された後の位置を該レーザ光照射部に対して指定するようにすることによって前述した課題を解決する。
【0019】
この方法によれば、前述した本発明に係る標本観察システムと同様の作用・効果を奏する。
【0020】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
まず、図1から図8にかけての各図面を参照しながら本発明に係る調整手法の基本原理を説明する。
【0021】
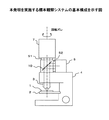
図1は本発明を実施する標本観察システムの基本構成を示している。
図1は、ステージ2と対物レンズ3とを有する顕微鏡装置4に、ポート52を介して画像取得装置6が取り付けられ、更に、ポート51を介してレーザ走査装置7が取り付けられた状態を示しており、ステージ2上には観察対象である標本1が配置されている。
【0022】
画像取得装置6は撮像素子としてCCDが備えられており、標本1の画像を取得する。取得された標本1の画像は同図では図示されていないパーソナルコンピュータ8(以下PC)によって画像情報として取り込まれる。
レーザ走査装置7は標本1に対して刺激を与えるため、あるいは標本1を加工するためにレーザ光を標本1へ照射する。レーザ走査装置7はこのレーザ光を偏向させる手段、本実施形態においては偏向用のミラーを有しており、標本1上の平面において直交しているX方向及びY方向にレーザ光の照射位置を移動させることができ、この照射位置はレーザ走査装置7に接続されるPC8によって制御される。なお、レーザ走査装置7がレーザ光を照射することのできる領域は必ずしも画像取得装置6の画像取得領域と一致していなくともよい。
【0023】
図1に示すように、画像取得装置6及びレーザ走査装置7の光学系は、これらの光軸がポート51及び52を各々通過した後、顕微鏡4内部に設けられているハーフミラー10の作用によって図中の点線で示すように1つの光路に合成され、対物レンズ3を通過して標本1に至るように配置される。
【0024】
これら2つの光学系の間でのずれが生じる要因には、第一に図2に示すような合成されたこれら2つの光軸の位置ずれ(角度を含む)、第二に画像取得装置6及びレーザ走査装置7が取り付けられているポート51及び52での取り付け角度の回転ずれ(光軸の回転ずれ)、第三に両光学系から対物レンズ端までで生じるレンズなどに起因する光学ひずみ、そして第四に画像取得装置6あるいはレーザ走査装置7自身が個々に持つ測定位置のひずみ(リニアリティ)が考えられる。
【0025】
以下、図1に示すシステムの調整の手法について説明する。
まず、調整のための準備として、レーザ光を反射するミラーなどを標本1としてステージ2上に配置する。また画像取得装置6及びレーザ走査装置7は各々標本1の表面でピントが合うように合焦位置の設定がされる。
【0026】
このように両者のピントが合った状態としたときにレーザ走査装置7によってレーザ光をスキャン(走査)させながら画像取得装置6で画像を取得させると、レーザ光の照射されている位置がレーザスポット(点)として表されている画像が取得できる。
【0027】
ここで、画像取得装置6による画像取得の速度とレーザ走査装置7の走査速度との差が十分に大きい場合には、画像取得装置6によって連続して繰り返し取得した画像を重ね合わせることでレーザ照射位置の軌跡が得られる。但し、両者の速度がほぼ同じ場合には、レーザ照射と画像取得との同期がとれないために取得されたレーザの照射位置の間隔が大きく離れてしまい、軌跡の取得がうまくできないことがあるので留意する。
【0028】
また、レーザ走査装置7に音響光学素子などを用いたレーザ光の変調手段がある場合、レーザ光のスキャン中に特定タイミングでレーザ光をON/OFFさせるような変調をレーザ光に与えることによってレーザ光の照射されたタイミングのみのパターンを同様に取得することもできる。
【0029】
このようにして得られた画像からその画像に示されているレーザ光の照射位置を示す画像上の座標(X’,Y’)を測定し、レーザ走査装置7に対して指示したレーザ光の照射位置の指示座標(X,Y)と、この座標(X’,Y’)との差(差異)を各点で算出する。
【0030】
以下、2つの光学系の間でのずれを生じさせる前述した4つの要因のそれぞれについて、その要因に応じたずれの解消の手法について説明する。
まず、前述した第一の原因である、画像取得装置6とレーザ走査装置7との光軸の位置ずれを解消する手法を説明する。
【0031】
図2に示したような画像取得装置6とレーザ走査装置7との光軸のずれによって生じるレーザ光の照射と取得画像との相対的なずれは取得画像の中心位置でのずれとして観測される。つまり、この相対的なずれは、図3に示すように、レーザ走査装置7に対して中心位置への照射を指示したときにレーザ光が実際に照射された照射位置(図3における格子中心)と、そのときに取得された画像の中心位置(図3における画像中心)とのずれを画素数の単位で算出することで知ることができる。
【0032】
レーザ走査装置7の振れ角及び走査領域の範囲は固定されているので、画像表示上で1画素あたりのレーザ光照射の振れ角は、
 で求めることができる。従って、画素数の単位で算出された画像上でのずれに(1)の式によって算出された振れ角を乗じることによって、画像上でのずれから振れ角のずれ量θへの換算を行うことができる。
で求めることができる。従って、画素数の単位で算出された画像上でのずれに(1)の式によって算出された振れ角を乗じることによって、画像上でのずれから振れ角のずれ量θへの換算を行うことができる。
【0033】
その後、図4に示すように、この振れ角のずれ量θを見込んでレーザ走査装置7の偏向量を予めオフセットさせるように偏向用ミラーによる偏向動作を補正する制御を行えば、結果としてレーザ走査装置7に指示された照射位置の指示座標が座標平面に対して平行に移動されることとなり、画像取得装置6で取得される画像上の位置とレーザ走査装置7によって照射されるレーザ光の照射指示位置とをその画像の中心部において合わせ込むことができる。
【0034】
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
なお、図4においては、同図における縦方向についてレーザ光照射の振れ角の補正を行うことのみが示されているが、実際には同図における横方向についても同様の補正を行う。
【0035】
次に、2つの光学系の間でのずれを生じさせる前述した第二の要因である、画像取得装置6とレーザ走査装置7との光軸の回転ずれを解消する手法を説明する。
画像取得装置6による画像の取得領域とレーザ走査装置7によるレーザ光の照射領域とが回転するようにずれている状態では、画像取得装置6とレーザ走査装置7との両方もしくは一方の取り付け角度がずれているということがある。このような設置状態において水平方向にレーザ走査装置7を走査して画像取得装置6で画像を取得すると、取得される画像には、図5(a)に示すように、水平ではなく傾きを持ったレーザ光の照射の軌跡が表される。
【0036】
以下、この傾き量を求める。
前述したレーザ光照射の振れ角の補正を行った後に水平方向にレーザ走査装置7を走査して画像取得装置6で画像を取得する。この取得画像からレーザ光の照射位置を示す画像上の座標を2つのポイントにおいて測定し、レーザ走査装置7に対して指示したレーザ光の照射位置の指示座標とをこの2つのポイントで求める。
【0037】
この2つのポイント各々の指示座標とその各々に対応する照射位置の取得画像上の座標とを
とすると、このときの角度は、
と変化したことがわかる。この角度の差をθとする。
【0038】
この角度分の回転ずれを補正するためには、指示座標(x,y)にレーザを照射する場合に、レーザ走査装置7でのレーザ光の偏向量をx方向成分とy方向成分とに分解して−θだけ回転させる座標変換を行えばよい。具体的には、x軸及びy軸の各々について、指示座標(x,y)に対し、
なる変換を施した位置にレーザ光を照射するようにレーザ走査装置7を制御すれば、図5(b)に示すように、レーザ光の走査範囲が回転する。これにより、取り付けレーザ走査装置7本体の取り付けを回転させることなく、回転ずれを補正することが可能となる。
【0039】
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
次に、2つの光学系の間でのずれを生じさせる前述した第三の要因である、両光学系から対物レンズ端までで生じるレンズなどに起因する光学ひずみを補償する手法を説明する。
【0040】
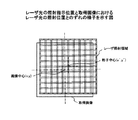
レンズ類などによる光学系のひずみが存在している状態において、その軌跡が等間隔の格子状となるようなレーザ光の照射をレーザ走査装置7に行わせ、その画像を画像取得装置6に取得させる。このようにして取得された画像は、図6(a)に示すように、本来は等間隔であるはずの格子の間隔が変化して表される。
【0041】
この取得画像に表されている格子の升目の位置(画像の中心の升目の交点を原点とする)とその升目の間隔の変化量との関係をプロットしたものが図6(b)のグラフである。このグラフより、照射位置(偏向角度)あたりのひずみ量(ずれ)を関数として表すことができる。
【0042】
ここで、xをレーザ走査装置7に対する照射指示位置(すなわち画像の中心からの距離)、yをレーザ光が実際に照射された照射位置とし、この関数をfとすると、y=f(x)という関係になる。ここで照射される位置yを照射指示位置xとするためには、x=f(x’)となるように入力x’を定める必要がある。
つまり、x’=f−1(x)なる変換をxについて施し、この変換によって得られる値x’をレーザ走査装置7に対する照射指示の値とすればよい。
【0043】
以上のようにすることによって光学系で生じたひずみが補償され、図6(c)に示すように、画像取得装置6で取得される画像にはレーザ光の軌跡が等間隔の格子として表されるようになる。
なお、図6においては、同図における横方向についてレーザ光照射の振れ角の補正を行うことのみが示されているが、実際には同図における縦方向についても同様の補正を行う。
【0044】
また、図6においては軌跡が等間隔の格子状となるようなレーザ光の照射をレーザ走査装置7に行わせているが、所定の照射位置、例えば図6に示す軌跡によって形成されている格子の交点の位置にレーザ光を照射させるようにレーザ走査装置7を制御し、このときの照射指示位置と実際にレーザ光が照射された位置とのずれ量を求め、このずれ量を基にして上述した関数fを更に求め、この関数fの逆関数f−1よりレーザ走査装置7に対する照射指示の値を設定するようにしてもよい。
【0045】
なお、画像取得装置6自身で生じさせているひずみが存在するとしても、このひずみは上述した光学系のひずみの一部として観測されるので、上述した手法で補償を行えば画像取得装置6自身で生じさせているひずみの影響も軽減される。
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
【0046】
次に、2つの光学系の間でのずれを生じさせる前述した第四の要因である、画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみを補償する手法を説明する。
いままでに説明した手法を全て行うことにより、レーザ走査装置7によるレーザ光の照射位置が1点に停止している状態の校正は行われる。しかし、レーザ走査装置7によってレーザ光のラスタスキャンを行う場合、常にレーザの位置は移動をしているため、前述の校正を行った項目の他に、レーザ走査装置7自身の応答遅れ(照射位置を移動させるための入力をしてからその指示位置まで照射位置が移動するまでの遅れ時間)や走査位置のひずみ特性(スキャン用の変調信号の変化に対する偏向用ミラーの偏向角度変化の追従性の悪さ)が照射位置のずれに影響を及ぼす。そしてこれらの量は走査速度が速いほど取得画像上での影響が大きくなることが知られている。ここでは、この両者を測定位置ひずみとし、この補償の手法について説明する。
【0047】
まず、レーザ走査装置7においてレーザ光を変調しながら縦方向・横方向にラスタスキャンを行わせ、図7の様な格子状のレーザ光の照射軌跡が標本1に表されるように偏向ミラーの制御を行う。この状態で画像取得を画像取得装置6に行わせると取得画像には格子状の軌跡が示される。
【0048】
いままでに説明した手法を予め全て行っていれば静止状態でのレーザ光の照射位置の校正は既になされている。従って、この取得画像に現れた格子の位置ずれはレーザ走査装置7自身に起因するものである。そこで、この格子の中心位置のずれを前述した画像取得装置6とレーザ走査装置7との光軸の位置ずれを解消する手法と同様に測定する。この中心位置のずれから照射位置のずれが求められる。
【0049】
ラスタスキャンでレーザ光の走査を行う場合、レーザ光の照射位置を変化させるために偏向ミラーに与えられる制御信号とその制御信号に応答して変化する偏向ミラーの向きとは、一般に図8の様な時間関係が認められる。同図においてここで問題としているレーザ走査装置7自身の応答遅れとはこの図におけるt1の部分である。つまり、この制御信号に時間遅れを持たせることなく同期させてレーザ光の照射を行うようにしてしまうと、標本1での照射位置はt1時間前の位置になってしまうということである。
【0050】
この時間遅れはレーザ走査装置7固有の特性のため、この特性をうち消すように制御信号を加工することは難しい。そこで、レーザ光の照射タイミングの制御を行うようにする。具体的には、制御信号からt1時間分遅らせたものからレーザ光の照射タイミングを得るようにしてレーザ光のON/OFF制御を行う。こうすることにより、図8に示すように、所望のレーザ光の照射位置に精度よくレーザを照射することができるようになる。
【0051】
なお、前述した他の手法と同様、この手法でも図7における縦・横の両方向について測定位置ひずみの補償を行うようにする。
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
【0052】
以下、上述した本発明に係る調整手法の基本原理を用いた具体的な実施例を幾つか説明する。
[実施例1]
図9は実施例1の標本観察システムの構成を示している。
【0053】
同図に示す構成は、CCD撮像装置61を備え、CCD撮像装置61の有するCCD素子によって取得された画像を一旦PC8に取り込んだ後、取得画像をモニ夕9に表示する画像取得装置6と、ミラー11の取り付けられた2つのガルバノメータ12が直交した位置に配置され、レーザ光源13からレーザ導入光路14を経て送られてくるレーザ光をそれそれ標本1の表面において直交するX軸方向及びY軸方向に偏向させることのできるレーザ走査装置7とを組み合わせてなるシステムである。
【0054】
CCD撮像装置61はポート52で顕微鏡4に接続され、対物レンズ3を介して標本1の像を取得する。取得された画像を表現する情報はPC8に取り込まれて処理が施され、標本1の画像としてモニタ9に表示される。またPC8はその取得画像上の特徴点を抽出し、その特徴点の位置を座標として読みとることができる。
【0055】
レーザ走査装置7はPC8によって2つのガルバノメータ12の動作角が制御され、PC8からの指示に応じた角度だけミラー11が移動する。この制御動作が2つのミラー11の各々に対して行われることにより、X軸方向及びY軸方向の各々任意の方向にレーザ光を偏向させることができる。偏向されたレーザ光はレーザ走査装置7との接続部であるポート51を通過し、対物レンズ3を通って標本1に照射される。
【0056】
なお、PC8は、標準的な構成を有するコンピュータ、すなわち、制御プログラムを実行することで各構成要素を制御するCPUと、ROMやRAM及び磁気記憶装置などからなり、CPUに各構成要素を制御させる制御プログラムの記憶やCPUが制御プログラムを実行する際のワークメモリあるいは各種データの記憶領域として使用される記憶部と、ユーザによる操作に対応する各種のデータが取得される入力部と、モニタ9などに各種のデータを提示してユーザに通知する出力部と、ネットワークに接続するためのインタフェース機能を提供するI/F部とを備えるコンピュータである。
【0057】
CCD撮像装置61によって取得される画像上の位置とレーザ走査装置7へのレーザ光照射の指示位置とを整合させる調整を行うとき、まず標本1としてミラーをステージ2上に置く。そして、まずCCD撮像装置61で標本1の表面にピントが合うように顕微鏡4のフォーカスを合わせる。このフォーカス調整を済ませれば、レーザ走査装置7はこの同一の対物レンズ3を介して標本1へレーザ光を照射するため、こちらの光学系におけるフォーカスも標本1の表面に合う。
【0058】
まずレーザ走査装置7の走査領域の中心にレーザ光を照射している状態でCCD撮像装置61によって画像を取得すると、図10に示すように、取得画像の中心付近にレーザスポットが表示される。このスポットの座標と取得画像の中心の座標との差がCCD撮像装置61とレーザ走査装置7との光軸のずれになる。
【0059】
このずれ量を前記の換算式(1)を利用してレーザ走査装置7のミラー11の振れ角へと変換する。そして、図4に示したように、この振れ角に当たる量だけレーザ走査装置7のミラー11の振れ角をオフセットさせて駆動させるようにする。この結果レーザ光の走査領域の中心と取得画像の中心は一致し、CCD撮像装置61とレーザ走査装置7との光軸の位置ずれが補正される。
【0060】
次に、これらの中心の補正を行った後に、画像取得範囲における例えば中心から水平あるいは垂直の位置に存在するいずれかの端の一点にレーザ光を照射し、これらの照射点の画像上のずれ量を画素数の単位で測定する。このずれ量を式(3)に当てはめるのだが、先に行った補正によって取得画像の中心は既に一致させているので、CCD撮像装置64を基準としたレーザ走査装置7のポート51への取り付け向きの回転ずれθは
となる。
【0061】
以降、レーザ走査装置7で指示座標(x,y)の位置にレーザ光の照射を行うときには、この(x,y)の値と上式によって求めたθとを式(4)に代入して得られる値で2つのガルバノメータ12を駆動する。こうすることで、前記の取り付けの回転ずれが補正され、図6に示したように、レーザ光を精度よく走査することができる。
【0062】
次に、PC8で行わせている処理を変更し、CCD撮像装置61で取得された画像を重ね合わせてモニタ9に表示させるようにする。この処理によりレーザ光を標本1上で走査させるとレーザ光の照射箇所は光量が上がるため、レーザ光の照射された点が軌跡となって表示される。
【0063】
ここで、レーザ走査装置7を制御して一定間隔の直線あるいは格子が軌跡として得られるようにレーザ光を走査させるようにする。このとき光学系などのひずみが存在する場合、CCD撮像装置61で取得された画像に現れる直線の間隔が一定ではなくなる。このとき、この変化した間隔を測定し、xをレーザ走査装置7に対する照射指示位置、そしてyをレーザ光が実際に照射された照射位置と照射指示位置とのずれとし、xとyとの関係を示す関数y=f(x)を求める。この関数は、例えば予め関数の次数を定めておき、各係数を最小二乗法等の使用によって推定することで獲得することができる。
【0064】
その後、このようにして得られた関数の逆関数f−1(x)を導き、以降、レーザ走査装置7で指示座標の位置にレーザ光の照射を行うときには、この指示座標の値をこの逆関数に入力して変換し、この変換によって得られた値でガルバノメータ12を駆動する。こうすることで、画像取得装置6とレーザ走査装置7との両光学系で生じるレンズなどに起因する光学ひずみが補償される。
【0065】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図11について説明する。同図はこの実施例1においてPC8によって行われる制御処理の処理内容を示すフローチャートである。同図に示す処理は上述した制御プログラムをPC8で実行させることによって行われる。
【0066】
図11(a)は、CCD撮像装置61とレーザ走査装置7との光軸の位置ずれの補正処理の処理内容を示している。
まず、S111において、まずミラーを標本1としてステージ2上にセットすることをこのシステムの使用者に促す表示をモニタ9に表示させる。
【0067】
ミラーのセットが確認されたら処理はS112に進み、CCD撮像装置61での取得画像のピントが合うように顕微鏡4のフォーカスを合わせる操作をこのシステムの使用者に促す表示をモニタ9に表示させる。なお、この処理として、PC8がCCD撮像装置61での取得画像に基づいて顕微鏡4のフォーカスを自動的に制御するいわゆるオートフォーカス制御処理を行うようにしてもよい。
【0068】
フォーカス調整の完了が確認されたら処理はS113に進み、レーザ走査装置7を制御し、その走査領域の中心の座標を指定してレーザ光を照射させる。そして続くS114においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0069】
S115では取得された画像からレーザスポットを見つけ出し、このレーザスポットの画像上における座標を取得する。
S116では、S113の処理においてレーザ走査装置7に対して指定したその走査領域の中心の座標と、S115の処理によって取得されたレーザスポットの画像上における座標との差を求めてCCD撮像装置61とレーザ走査装置7との光軸のずれ量を算出し、前記の換算式(1)を利用してこのずれ量をレーザ走査装置7のミラー11の振れ角へと変換する。
【0070】
S117ではレーザ走査装置7を制御し、S116の処理によって得られた振れ角だけミラー11の振れ角をオフセットさせる。
以上までの処理がCCD撮像装置61とレーザ走査装置7との光軸の位置ずれの補正処理である。
【0071】
次に図11(b)の処理を説明する。この処理はCCD撮像装置61とレーザ走査装置7との光軸の回転ずれの補正処理の処理内容を示している。
なお、この処理は前述したCCD撮像装置61とレーザ走査装置7との光軸の位置ずれの補正処理を完了してから行うようにする。
【0072】
同図におけるS121及びS122の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
S122の処理の後、フォーカス調整の完了が確認されたら処理はS123に進み、レーザ走査装置7を制御し、その走査領域の中心から水平あるいは垂直の位置に存在するいずれかの端の一点にレーザ光を照射させる。そして続くS124においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0073】
S125では取得された画像からレーザスポットを見つけ出し、このレーザスポットの画像上における座標を取得する。
S126では、S123の処理においてレーザ走査装置7に対して指定したその照射位置の座標と、S125の処理によって取得されたレーザスポットの画像上における座標とを前記の換算式(5)に代入し、CCD撮像装置61とレーザ走査装置7との光軸の回転ずれの角度を算出する。
【0074】
S127では、S126の処理によって得られた角度を前記の(4)式に代入し、ガルバノメータ12の駆動指示をこの(4)式によって算出される値に基づいて行うようにレーザ走査装置7の制御処理の設定を行う。
以上までの処理がCCD撮像装置61とレーザ走査装置7との光軸の回転ずれの補正処理である。
【0075】
次に図11(c)の処理を説明する。この処理は画像取得装置6とレーザ走査装置7との両光学系で生じる光学ひずみの補償処理の処理内容を示している。
なお、この処理は前述したCCD撮像装置61とレーザ走査装置7との光軸の位置ずれ及び回転ずれの両補正処理を完了してから行うようにする。
【0076】
同図におけるS131及びS132の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
S132の処理の後、フォーカス調整の完了が確認されたら処理はS133に進み、レーザ走査装置7を制御し、その走査領域の四隅を含む領域内の複数の位置のいずれかにレーザ光を照射させる。そして続くS133においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込み、既に得られている画像と重ね合わせる。そして、S135においてこのS133及びS134の処理を所定数回繰り返し、レーザ光の照射位置の軌跡が表されている画像を作成する。
【0077】
なお、S133において、走査領域の四隅をレーザ照射の位置として特掲しているのは、この位置が最も大きな光学ひずみを受けていると考えられるからである。
S135の判定処理の結果がYesとなり、S133及びS134の処理の所定回数の繰り返しが完了したときにはS136へと処理が進み、レーザ光の照射位置の軌跡が表されている画像から、その軌跡を構成している全てのレーザスポットの画像上における座標を取得する。
【0078】
続くS137において、S133の処理においてレーザ走査装置7に対して指定したレーザ光の照射位置の座標と、S136の処理によって取得されたレーザスポットの画像上における座標との差を算出する。
S138では、S137の算出結果から、S133の処理においてレーザ走査装置7に対して指定したレーザ光の照射位置の座標と、その指定座標でのレーザ光の照射位置のずれとの関係を示す関数を求める。
【0079】
S139では、S138の処理によって得られた関数の逆関数を算出し、ガルバノメータ12の駆動指示をこの逆関数による変換によって得られる値に基づいて行うようにレーザ走査装置7の制御処理の設定を行う。
以上までの処理が画像取得装置6とレーザ走査装置7との両光学系で生じる光学ひずみの補償処理である。
【0080】
なお、以上までに説明した各処理によって一旦得られた調整のための各値をPC8の有する記憶装置に格納しておくようにすれば、このシステムの使用開始時にこれらの調整処理を毎度行うような手間を省くことができる。
また、実施例1においてはレーザ光の照射位置をCCD撮像装置61による取得画像に表すために標本1としてミラーを用いたが、その代わりに一様に染色され、レーザ光によって励起される蛍光標本を用いるようにしてもよい。また、CCD撮像装置61の画像取得感度が十分に高いのであればガラス表面の反射を取得するようにしてもよい。また、実施例1では画像取得装置6としてCCD撮像装置61を用いたが、TVカメラ等の撮像装置であってもよい。
【0081】
また、実施例1のシステムは画像取得装置6とレーザ走査装置7とを1つずつ備えた構成としていたが、複数の画像取得装置6を設け、個別にレーザ走査装置7との間のずれを補償する調整値を求めるようにしてもよい。
[実施例2]
図12は実施例2の標本観察システムの構成を示している。同図に示す構成と図9に示した実施例1の構成との違いは、顕微鏡4の透過像位置にCCD撮像装置61を配置し、落射側にレーザ走査装置7を配置した点にある。この実施例2のような構成は、CCD撮像装置61が標本1の微分干渉像などの透過像を取得するために好適なものである。
【0082】
この実施例2に示す構成では、レーザ走査装置7から照射されたレーザ光は対物レンズ3を通過し標本面と反対側のCCD撮像素子61に直接照射される。このため実施例1のように両者の照射位置を調整する場合、実施例1では撮像素子にレーザ光を送るため標本1としてミラーを配置したが、実施例2ではこのような調整用の標本1は不要である。
【0083】
なお、この実施例2において、CCD撮像装置61によって取得される画像上の位置とレーザ走査装置7へのレーザ光照射の指示位置とを整合させる調整の手順は実施例1と全く同じである。
また、この実施例2においてPC8によって行われる制御処理の処理内容を示すフローチャートを図13に示す。同図を図11に示したフローチャートと比較すると分かるように、図11におけるS111、S121、S131の処理、すなわちミラーを標本1としてステージ2上にセットすることを使用者に促す処理が図13に示されている処理では行われないことを除けば、この両処理は同様の処理である。
【0084】
なお、この図12に示した実施例2のシステムではステージ2の真下にCCD撮像装置61を配置したが、この位置は標本1の透過画像が結像する位置であればステージ2の真下に限定されるものではない。また、実施例2では画像取得装置6としてCCD撮像装置61を用いたが、TVカメラ等の撮像装置であってもよい。
[実施例3]
実施例3は、実施例1におけるレーザ走査装置7若しくはレーザ光源13がレーザ光の変調を行う変調部を備えているというシステムである。音響光学素子を用いたAOM(Acoustic Optical Modulator)やAOTF(Acoustic Optical Tunable Filter )を備えたレーザ光の変調部を有していれば、スキャニング中に高速でレーザ光のON/OFF制御を行うことで容易に特定領域の範囲だけにレーザ光の照射を行うことができる。なお、このシステムではレーザ走査装置7若しくはレーザ光源13に備えられている変調部をPC8によって制御可能なように構成する。
【0085】
このシステムでは、まずレーザ光が常に照射される状態にレーザ走査装置7を設定した上で、前述した実施例1におけるものと同様の調整を行い、CCD撮像装置61とレーザ走査装置7との光軸の位置ずれ及び回転ずれの補正、並びに両光学系で生じる光学ひずみの補償を行う。
【0086】
次に、画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみを補償するための調整を行う。
具体的には、レーザ走査装置7を制御してラスタスキャンを行なわせながら照射中のレーザ光を変調し、図10に示したような格子模様にレーザ光が走査されるようにする。この状態でCCD撮像装置61に画像の取得を行わせるとその画像に格子状の軌跡が表れる。先に、静止状態(スキャンを行わない状態)での調整は終えているのでここで表示された格子の位置ずれはすべてレーザ走査装置7自身に起因している。そこで、この格子の中心位置のずれを前述した画像取得装置6とレーザ走査装置7との光軸の位置ずれを解消する手法と同様に測定する。
そして、この中心位置のずれから応答遅れ(レーザ光照射のタイミングずれ)を算出する。
【0087】
ここで算出タイミングのずれ量であるt1時間分だけ、レーザ光の照射タイミングを遅らせるようにレーザ走査装置7を制御する。すなわち、図8に示したように、照射指示の入力に対してt1時間分遅らせてレーザのON/OFF制御を行う。こうすることによりレーザ光の照射を所望の位置に行えるようになる。
【0088】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図14について説明する。同図はこの実施例3においてPC8によって行われる制御処理のうち、画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみの補償処理の処理内容を示している。
【0089】
なお、この処理は前述したCCD撮像装置61とレーザ走査装置7との光軸の位置ずれ及び回転ずれの両補正処理、並びに両光学系で生じる光学ひずみの補償処理を完了してから行うようにする。
同図におけるS311及びS312の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
【0090】
フォーカス調整の完了が確認されたら処理はS313に進み、レーザ走査装置7を制御してレーザ光を照射させ、その走査領域を走査させる。ここで続くS314においてレーザ走査装置7に指示を与えてレーザ光を変調し、図10に示したような格子模様にレーザ光が走査されるようにする。そして続くS315においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0091】
S316では、S315の処理によって取得された画像に表されているレーザ光の軌跡における格子の中心の交点の画像上における座標を取得する。
S317では、S315の処理によって取得された画像の中心の座標とS316の処理によって取得された格子の中心の交点の座標との差を求め、この差を時間の単位に変換する。この変換は、両座標の距離をレーザ光の走査速度で除算することによって行われる。この変換によって、格子の中心の交点の座標の照射指示がされた時刻と、格子の中心の交点の座標が照射された時刻との時間差が得られる。
【0092】
S318では、レーザ光走査装置7内においてレーザ光の照射のタイミングの制御信号をS317の処理によって得られた時間だけ遅らせる設定を行う。
以上までの処理が画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみの補償処理である。
【0093】
なお、以上までに説明した処理によって一旦得られた調整のための各値をPC8の有する記憶装置に格納しておくようにすれば、このシステムの使用開始時にこれらの調整処理を毎度行うような手間を省くことができる。
また、レーザの変調を行う手段として本実施例では音響光学素子を用いたが、レーザ自身で変調を与えることのできる半導体レーザを用いるようにしてもよい。
【0094】
また、調整時にレーザ光を照射させて生成する軌跡のパターンは、図10に示したような升目の格子パターンでなくとも、中心位置と等間隔に並んだ何カ所かの照射位置とが読みとれるようなパターンであればどのようなでもよい。
なお、前述した画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみのうち、走査位置のひずみ特性に関しては、走査範囲の両端付近を除く範囲においてひずみ無くほぼ一定の速度で走査をさせるように駆動させる技術はすでに数多く存在するので、この周知の技術を採用することで走査ひずみの補償をおこなうようにしてもよい。
【0095】
なお、実施例3は、実施例1におけるレーザ走査装置7がレーザ光の変調を行う変調部を備えているというシステムとしたが、実施例2におけるレーザ走査装置7がレーザ光の変調を行う変調部を備えているというシステムであっても実施例3において行ったものと同様の調整手法を採用することができる。
[実施例4]
図15は実施例4の標本観察システムの構成を示している。同図に示す構成と図9に示した実施例1の構成との大きな違いは、画像取得装置6としてCCD撮像装置61の代わりにレーザ走査型顕微鏡62が装備されている点にある。
【0096】
レーザ走査型顕微鏡装置62(以下、「LSM」と称することとする)は、レーザ走査装置7と同様に、ミラー110の取り付けられた2つのガルバノメータ120でレーザ光源130から発せられたレーザ光を偏向させ、標本1面にレーザを照射する。標本面に当てられたレーザ光の反射光あるいは蛍光は対物レンズ3を通過してダイクロイックミラー140で反射され、光電子増倍管やフォトダイオードなどを有して構成される検出装置150に送られ、光の強度の変化として記録される。この光強度の変化情報が画像情報としてPC8に送られ、PC8において画像として構成される。またPC8はその取得画像上の特徴点を抽出し、その特徴点の位置を座標として読みとることができる。
【0097】
レーザ走査装置7はPC8によって2つのガルバノメータ12の動作角が制御され、PC8からの指示に応じた角度だけミラー11が移動する。この制御動作が2つのミラー11の各々に対して行われることにより、X軸方向及びY軸方向の各々任意の方向にレーザ光を偏向させることができる。偏向されたレーザ光はレーザ走査装置7との接続部であるポート51を通過し、対物レンズ3を通って標本1に照射される。
【0098】
LSM62によって取得される画像上の位置とレーザ走査装置7へのレーザ光照射の指示位置とを整合させる調整を行うとき、まず標本1としてミラーをステージ2上に置く。そして、まずCCD撮像装置61で標本1の表面にピントが合うように顕微鏡4のフォーカスを合わせる。このフォーカス調整を済ませれば、レーザ走査装置7はこの同一の対物レンズ3を介して標本1へレーザ光を照射するため、こちらの光学系におけるフォーカスも標本1の表面に合う。
【0099】
この実施例4のシステムに対して行う調整手法は、実施例1と全く同じ手順で行うことができるので説明は省略する。
なお、レーザ走査装置7から照射されたレーザ光の照射位置が表されている画像をLSM62で取得できるようにするためにへ映し出すために標本1としてミラーを用いたが、その代わりに一様に染色され、レーザ光によって励起される蛍光標本を用いるようにしてもよい。また、LSM62の画像取得感度が十分に高いのであればガラス表面の反射を取得するようにしてもよい。
【0100】
更に、一様な蛍光標本の各点に高エネルギーのレーザ光を照射することで、部分的に蛍光退色をおこさせ、LSM62でその退色痕を観察測定するようにして調整を行うこともできる。こうすることにより、レーザ光の照射位置の軌跡を得るためにPC8で画像を累積合成する処理が不要となる。
【0101】
また、実施例4ではレーザ走査装置7が専らレーザ光を照射するための装置としていたが、レーザ走査装置7へ戻ってくるレーザ光の強度を測定する検出装置を備えているもの、例えば、レーザ走査装置7としてもLSMを用いて2つのLSMを組み合わせたシステムを構成し、その一方をレーザ走査装置7として機能させ、他方を画像取得装置6として機能させるようにしてもよい。
[実施例5]
実施例5は、実施例4におけるレーザ走査装置7若しくはレーザ光源13がレーザ光の変調を行う変調部を備えているというシステムである。この実施例5のシステムに対して行う調整手法は、実施例3と全く同じ手順で行うことができるので説明は省略する。
[実施例6]
実施例6は、実施例1、3、4、または5のシステムであるレーザ走査装置7若しくはレーザ光源13がレーザ光の変調を行う変調部を備えているシステムであり、これらのシステムで、取得画像中におけるレーザ光を照射する位置・範囲が予め特定されている場合の調整の手法である。
【0102】
まず、実施例1または実施例4のシステムでの調整の手法を説明する。
前述した実施例1または実施例4では、画像取得装置6で取得される画像の中心付近に表れるレーザスポットの位置に基づいて光軸の位置ずれの補正を行い、またその光軸の位置ずれの補正結果に基づいて、光軸の回転ずれ及び光学系のひずみの補償を行うようにしていた。これに対し、これに対し、実施例6では、レーザ光の照射位置が実験前に予め特定されているような場合に、この照射位置に基づいて光軸の位置ずれの補正を行い、またその光軸の位置ずれの補正結果に基づいて、光軸の回転ずれ及び光学系のひずみの補償を行うようにする。こうすることにより、その指定領域内においては、実施例1または実施例4による調整のみによるものよりも更に精度の良い光学ひずみの補償が可能となる。
【0103】
次に、実施例3または実施例5のシステムでの調整の手法を説明する。
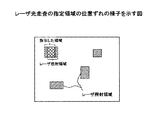
前述した実施例3または実施例5では、画像取得装置6で取得される画像の中心部で観測されるレーザ光照射のタイミングずれに基づいてレーザ光の走査範囲の全域に渡る光学ひずみの補償を行っていた。これに対し、実施例6では、例えば蛍光を発する標本1に部分的に蛍光退色を起こさせる等の目的で、図16に示すように、標本1における特定の領域のみを走査するようにその変調部を制御してレーザ光を照射させるときにおける、領域の指定範囲と実際にレーザ光が照射される領域との位置ずれを補正する手法を説明する。
【0104】
まず、前述した光軸、回転、光学ひずみの調整を、指定領域の中心(微小領域走査の中心)の位置に基づいて全て行う。これにより、指定領域の中心(微小領域走査の中心)付近に対してレーザ光を照射させることが可能となる。
ここで、指定領域分のみにレーザ光を照射するために、指定領域の範囲にレーザ光が照射される角度にミラー11の角度が達したときにレーザ光を照射する必要がある。
【0105】
このような照射を可能とするためには、前述した実施例3の調整手法を適用してレーザ光照射のタイミングずれを算出し、レーザ走査装置7に対して指定領域の開始位置に照射させるためのタイミングから時間t1だけ遅らせてレーザを照射し、同様に指定領域の終止位置に照射させるためのタイミングから時間t1だけ遅らせてレーザ光の照射を中断する。これを繰り返すことで指定の領域に正しくレーザ照射を行うことが可能となる。また、このように指定の領域内で観測されるレーザ光照射のタイミングずれに基づいてレーザ光の走査範囲である指定領域内における光学ひずみの補償を行うことにより、その指定領域内においては、実施例3または実施例5による調整のみによるものよりも更に精度の良い光学ひずみの補償が可能となる。
【0106】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図17について説明する。同図はこの実施例6においてPC8によって行われる制御処理の処理内容を示すフローチャートである。同図に示す処理は上述した制御プログラムをPC8で実行させることによって行われる。
【0107】
図17(a)は、実施例1または実施例4のシステムにおいて予め特定されている指定位置へのレーザ光の照射を行うときの制御処理の処理内容を示している。
まず、S611において、観察・実験対象である蛍光を発する標本1をステージ2上にセットすることをこのシステムの使用者に促す表示をモニタ9に表示させる。
【0108】
標本1のセットが確認されたら処理はS612に進み、CCD撮像装置61での取得画像のピントが合うように顕微鏡4のフォーカスを合わせる操作をこのシステムの使用者に促す表示をモニタ9に表示させる。なお、この処理として、PC8がCCD撮像装置61での取得画像に基づいて顕微鏡4のフォーカスを自動的に制御するいわゆるオートフォーカス制御処理を行うようにしてもよい。
【0109】
S612の処理の後、フォーカス調整の完了が確認されたら処理はS613に進み、CCD撮像装置61(あるいはLSM62)にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
S614では、S613の処理によって取り込まれた画像をモニタ9に表示させ、レーザ光を照射する指示位置をこの表示画像上から選択することをこのシステムの使用者に促す表示をモニタ9に表示させる。
【0110】
使用者による指示位置の選択が確認されたら処理はS615に進み、この指示位置の座標を取得する。
S616では照射指示位置の座標からレーザ走査装置7への入力値への変換処理が行われる。この処理は、具体的には、図11(a)のS113からS117にかけての処理、図11(b)のS123からS127にかけての処理、および図11(c)のS131からS138にかけての処理を順に行って、S615の処理によって取得された指示位置の座標に基づいた光軸の位置ずれ及び回転ずれの補正処理並びに光学ひずみの補償処理を行う。そして、これらの処理によって算出された各設定値を用いてS615の処理によって取得された指示位置の座標の変換を行う。
【0111】
S617では、S616の処理における変換によって得られた座標をレーザ走査装置7へ送付し、続くS618において、その送付された座標を照射指示座標としたレーザ光の照射の設定をレーザ走査装置7に行う。
S619では、S618の処理によってなされたレーザ光の一点照射の設定の下で所定の実験・観察がこのシステムの使用者によって行われる。
【0112】
以上までの処理が実施例1または実施例4のシステムにおいて予め特定されている指定位置へのレーザ光の照射を行うときの制御処理である。
次に図17(b)の処理を説明する。この処理は実施例3または実施例5のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うときの制御処理の処理内容を示している。
【0113】
同図におけるS621及びS622の処理はそれぞれ前述した図17(a)のS611及びS612の処理と同様である。
S622の処理の後、フォーカス調整の完了が確認されたら処理はS623に進み、CCD撮像装置61(あるいはLSM62)にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0114】
S624では、S623の処理によって取り込まれた画像をモニタ9に表示させ、レーザ光を照射する指示領域をこの表示画像上から選択することをこのシステムの使用者に促す表示をモニタ9に表示させる。
使用者による指示領域の選択が確認されたら処理はS625に進み、この指示領域を特定するための座標、例えば指示領域を囲む矩形の各頂点の座標と、この指示領域を代表する位置の座標、例えば指示領域の中心の座標とを取得する。
【0115】
S626では照射指示領域の座標からレーザ走査装置7への入力値への変換処理が行われる。この処理は、具体的には、図11(a)のS113からS117にかけての処理、図11(b)のS123からS127にかけての処理、および図11(c)のS131からS138にかけての処理を順に行って、S625の処理によって取得された指示領域を代表する位置の座標に基づいた光軸の位置ずれ及び回転ずれの補正処理並びに光学ひずみの補償処理を行う。そして、これらの処理によって算出された各設定値を用いてS625の処理によって取得された指示領域を特定するための座標の変換を行う。
【0116】
S627では、S626の処理における変換によって得られた各座標をレーザ走査装置7へ送付する。
S628では、照射指示領域の座標からレーザ光の変調信号に与える遅延時間への変換処理が行われる。この処理は、図14のS316からS318にかけての処理を行ってS625の処理によって取得された指示領域を代表する位置の座標に基づいた測定位置ひずみの補償処理を行う。
【0117】
S629では、S628の処理における変換によって得られた遅延時間だけ送られた変調信号をレーザ光の変調部へ送付する。
S630では、S627の処理によって送付された各座標で特定される領域を照射指示領域としたレーザ光の走査の設定をレーザ走査装置7に行う。
【0118】
S631では、S630までの処理によってなされたレーザ光の走査の設定の下で所定の実験・観察がこのシステムの使用者によって行われる。
以上までの処理が実施例3または実施例5のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うときの制御処理である。
[実施例7]
実施例7は、実施例3または5のシステムに対して実施例6のようにして行われた指定領域の走査における領域の指定範囲と実際にレーザ光が照射される領域とのずれの補正を、レーザ光の変調部を有しない実施例1、2、または4のシステムにおいて行うものである。
【0119】
実施例1、2、及び4のシステムはいずれもレーザ光の変調部を有していないため、前述したような指定領域の走査を行うためにレーザ光をON/OFFすることができない。このため、照射領域はレーザの振れ角、すなわちミラー11の振れ角そのものとなる。ところが、図18に示すように、ミラー11を駆動するための制御信号とミラー11の実際の振れ角との間には応答遅れがあるため一致しない。そのため、所望の領域にレーザ光を照射しようとしても、その所望の領域よりも狭い範囲にしかレーザ光を照射することができないことがある。しかも、この照射不良の範囲は、ミラー11を高速に動作させようとしてミラー11の駆動制御信号の周波数を高めればそれだけ拡大してしまう。
【0120】
この照射不良の範囲を減少させるため、前述した実施例1、2、4の各々の調整手法を予め行っておき、その後に特定の領域走査を行ったときの実際の照射範囲をレーザ光の照射位置の軌跡として測定し記録しておく。そして、ミラー11の駆動制御信号に対して振れ角が不足する分だけ、その駆動制御信号の振幅を増加させてミラー11の振れ角をそれだけ大きくする。
【0121】
このときの駆動制御信号の振幅の増加比率は以下のようにして求める。
図18において、レーザ光の走査を行わせるためにミラー11へ制御信号を与えてレーザを走査させたときのミラー11の動きは図中の波形のようになり、標本1上での振れ幅はbになる。このbの幅を画像取得装置6で測定することにより、その制御信号によって指示を行っているレーザ光の振れ幅aとの比率b/aを求めることができる。この比率は、指示を行っているレーザ光走査の範囲と実際に走査された範囲との差異を示すものである。
【0122】
ここで、この比率b/aだけミラー11の振れ角を拡大させる。こうすることで、レーザ光の走査範囲が拡大され、標本1上で必要な振れ幅を確保できるようになる。
なお、この比率は駆動制御信号波形の形状によって異なるのでレーザ光の走査に使う波形毎にその比率を求めておく必要がある。
【0123】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図19について説明する。同図はこの実施例7においてPC8によって行われる制御処理であって、レーザ光の変調部を有していない実施例1、2、及び4のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うための処理の処理内容を示すフローチャートである。同図に示す処理は上述した制御プログラムをPC8で実行させることによって行われる。
【0124】
同図におけるS711及びS712の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
S712の処理の後、フォーカス調整の完了が確認されたら処理はS713に進み、CCD撮像装置61(あるいはLSM62)にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0125】
S714では、S713の処理によって取り込まれた画像をモニタ9に表示させ、レーザ光を照射する指示領域をこの表示画像上から選択することをこのシステムの使用者に促す表示をモニタ9に表示させる。
使用者による指示領域の選択が確認されたら処理はS715に進み、この指示領域を代表する位置の座標、ここでは指示領域の中心の座標を取得する。
【0126】
S716では照射指示領域の座標からレーザ走査装置7への入力値への変換処理が行われる。この処理は、具体的には、図11(a)のS113からS117にかけての処理、図11(b)のS123からS127にかけての処理、および図11(c)のS131からS138にかけての処理を順に行って、S715の処理によって取得された指示領域の中心の位置の座標に基づいた光軸の位置ずれ及び回転ずれの補正処理並びに光学ひずみの補償処理を行う。
【0127】
S717では、S714の処理によって確認された指示領域についてS716の処理による変換を施してレーザ光の走査を行ったときの走査範囲の四隅の座標を取得する。
S718では、S717の処理によって取得された座標から、ミラー11への制御信号によって走査させようとしているレーザ光の振れ幅aに対する標本1上で本来走査させようとしているレーザ光の走査幅bを求めて比率b/aの計算を行う。
【0128】
S719では、標本1がミラーから観察対象のものへと取り替えられ、S718の処理によって算出された比率だけミラー11の振れ角を拡大させる設定をレーザ走査装置7に対して行う。
S720では、S714の処理によって確認された指示領域についてS716の処理による変換を施した後の位置を中心としてレーザ光を走査する設定をレーザ走査装置7に行う。
【0129】
S721では、標本1がミラーから観察対象のものへと取り替えられ、S720までの処理によってなされたレーザ光の走査の設定の下で所定の実験・観察がこのシステムの使用者によって行われる。
以上までの処理がレーザ光の変調部を有していない実施例1、2、及び4のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うための処理である。このようにして調整を行うことにより、レーザ光の変調部を有していないシステムであっても、指定の領域をレーザ光で精度よく照射することができるようになる。
【0130】
なお、以上までに説明した処理によって一旦得られた調整のための値をPC8の有する記憶装置に格納しておくようにすれば、このシステムの使用開始時にこれらの調整処理を毎度行うような手間を省くことができる。
【0131】
【発明の効果】
以上詳細に説明したように、本発明は、標本の像が表されている画像を取得する画像取得部を有する画像取得装置と、該標本にレーザ光を照射するレーザ光照射部を有するレーザ光走査装置とを備えている標本観察システムにおいて、レーザ光照射部によって照射されたレーザ光の照射位置を画像取得部で取得された画像から測定し、この測定により得られた照射位置とレーザ光照射部に対して指示されたレーザ光照射の照射指示位置との差異を示す情報に基づいて、レーザ光照射部の照射位置を校正するようにする。
【0132】
こうすることにより、レーザ光の照射位置を測定するための専用の測定手段や特別の工具を用いることなくレーザ光の照射位置の調整をおこなうことができるようなるという効果を奏する。
【図面の簡単な説明】
【図1】本発明を実施する標本観察システムの基本構成を示す図である。
【図2】画像取得装置とレーザ走査装置との光軸のずれを示す図である。
【図3】レーザ光の照射指示位置と取得画像におけるレーザ光の照射位置とのずれの様子を示す図である。
【図4】画像取得装置とレーザ走査装置との光軸の位置ずれの補正の方法を説明する図である。
【図5】画像取得装置とレーザ走査装置との光軸の回転ずれ補正の手法を説明する図である。
【図6】レンズ等で生じる光学ひずみの補償の手法を説明する図である。
【図7】格子状のレーザ光の照射軌跡を示す図である。
【図8】偏向ミラーの制御信号と変更ミラーの位置変化との時間関係を示す図である。
【図9】実施例1の標本観察システムの構成を示す図である。
【図10】レーザスポットが表されている取得画像の例を示す図である。
【図11】実施例1のPCによって行われる制御処理の処理内容を示すフローチャートである。
【図12】実施例2の標本観察システムの構成を示す図である。
【図13】実施例2のPCによって行われる制御処理の処理内容を示すフローチャートである。
【図14】測定位置ひずみの補償処理の処理内容を示すフローチャートである。
【図15】実施例4の標本観察システムの構成を示す図である。
【図16】レーザ光走査の指定領域の位置ずれの様子を示す図である。
【図17】実施例6のPCによって行われる制御処理の処理内容を示すフローチャートである。
【図18】指定領域のレーザ光走査において生じる照射不良を説明する図である。
【図19】実施例7のPCによって行われる制御処理の処理内容を示すフローチャートである。
【符号の説明】
1 標本
2 ステージ
3 対物レンズ
4 顕微鏡装置
51、52 ポート
6 画像取得装置
61 CCD撮像装置
62 レーザ走査型顕微鏡装置
7 レーザ走査装置
8 PC
9 モニタ
10 ハーフミラー
11、110 ミラー
12、120 ガルバノメータ
13、130 レーザ光源
14 レーザ導入光路
140 ダイクロイックミラー
150 検出装置
【発明の属する技術分野】
本発明は、標本の像が表されている画像を取得する画像取得装置で用いられる技術に関し、特に、画像取得装置で取得される画像の画像上における位置と、該標本に照射するレーザ光の照射位置とのずれを低減させる技術に関する。
【0002】
【従来の技術】
従来、標本の像が表されている画像を取得する画像取得装置で取得される画像の画像の画像上における位置と、標本にレーザ光を照射するレーザ走査装置におけるレーザ光の照射位置とのずれを低減させる技術として、2つの装置の組み付け精度のみで光軸のずれを吸収する手法や、特許文献1に開示されている手法、すなわちレーザ走査装置内部にCCD(Charge Coupled Device)撮像素子を配置してそこに投影されたレーザ光の位置によってレーザ走査装置内部で照射位置の校正を行う手法がある。
【0003】
また、複数の画像取得装置で取得された同一の標本が表されている別個の画像を重ね合わせる手法として、特許文献2に開示されている手法の様に、画像の取得後に画像自身を加工する手法がある。
【0004】
【特許文献1】
特開平11−242164号公報
【特許文献2】
特開平11−231223号公報
【0005】
【発明が解決しようとする課題】
上述したような従来技術は、画像取得装置単体あるいはレーザ走査装置単体で光学系の調整が独自に行われているに過ぎないため、両者間の光軸のずれは組み付け精度に依存することとなり、実質的には管理されていない状態にあった。
【0006】
このため、複数の画像取得装置を組み合わせて異なる複数の画像を取得したときには、得られた同一標本の画像を重ね合わせる処理を行うための画像処理手段が必要となる。しかし、このような画像処理は処理量が膨大であり、リアルタイムで重ね合わせ処理をするには大きな処理負担が生じてしまう。
【0007】
また、レーザ走査装置単体の校正を行う場合であっても、特許文献1に開示の手法のように専用の撮像素子が必要となる。しかもこの校正は走査装置単体で独自に行うものであるため他の装置との相関を取ることは考慮されていない。
このように、顕微鏡分野において1つあるいは複数の画像取得装置とレーザ走査装置とを組み合わせたシステムにおいて、画像取得装置で取得される画像上の位置とレーザ走査装置から照射されるレーザの照射位置とをその画像の全領域において一致させる調整手法は確立されていないのが現状である。
【0008】
以上の問題を鑑み、標本が表されている画像の画像上の位置とその標本に照射するレーザの照射位置とのずれを低減させる調整手法を提供することが本発明が解決しようとする課題である。
【0009】
【課題を解決するための手段】
本発明では、画像取得装置からの画像情報上の位置によってレーザ走査装置からのレーザ光の照射位置が規定される装置を提案し、且つレーザ走査装置からのレーザ照射位置と画像取得装置からの画像情報上の位置とを一致きせるための調整手法を提案する。
【0010】
本発明の態様のひとつである標本の観察を行うためのシステムは、前記標本の像が表されている画像を取得する画像取得手段を有する画像取得装置と、前記標本上の位置の指定に応じ、該位置に向けてレーザ光を照射するレーザ光照射手段を有するレーザ光走査装置と、前記レーザ光の照射位置と、前記レーザ光照射手段に対して指定された前記位置との差異を検出する検出手段と、前記レーザ光照射手段に対して指定される前記位置の変換を前記差異に基づいて行い、該変換が施された後の位置を該レーザ光照射手段に対して指定する変換手段と、を備え、前記変換手段は、前記レーザ光照射手段に対して指定される前記変換前の前記位置と、該変換が施された後の位置が指定された該レーザ光照射手段によって照射されるレーザ光の照射位置との前記画像上における差異が、前記検出手段によって検出されていた前記差異よりも少なくなるように前記変換を行うように構成することによって前述した課題を解決する。
【0011】
上記の構成によれば、レーザ光の照射位置を測定する手段として画像取得装置を用いることで専用の測定手段を設けることなく調整を可能とする。また特別な工具を用いることなく所望の調整を行うことができる。
なお、上述した本発明に係る標本観察システムにおいて、前記画像取得装置は、撮像装置またはレーザ走査型顕微鏡であるように構成することができる。
【0012】
また、前述した本発明に係る標本観察システムにおいて、前記変換手段によって行われる変換は、前記レーザ光照射手段に対して指定される前記位置を平行に移動する変換であるように構成することができる。
この構成によれば、画像取得装置とレーザ走査装置との光軸の位置ずれを解消することができるようになる。
【0013】
また、前述した本発明に係る標本観察システムにおいて、前記変換手段によって行われる変換は、前記レーザ光照射手段に対して指定される前記位置の回転変換であるように構成することができる。
この構成によれば、画像取得装置とレーザ走査装置との光軸の回転ずれを解消することができるようになる。
【0014】
また、前述した本発明に係る標本観察システムにおいて、前記変換手段によって行なわれる変換は、前記レーザ光照射手段に対して指定される前記位置の前記画像上における位置と、該画像の中心の位置との間の距離に基づいた変換であるように構成することができる。
【0015】
この構成によれば、画像取得装置とレーザ走査装置との各々の光学系で生じ得る光学ひずみの補償を行うことができるようになる。
また、前述した本発明に係る標本観察システムにおいて、前記レーザ光照射手段は、該レーザ光照射手段によって照射されるレーザ光を前記標本上で走査させる走査手段を更に有し、前記検出手段は、前記走査手段によって走査された前記レーザ光の前記標本上での走査の軌跡上に位置する所定の点と、該レーザ光が該所定の点を照射したときに前記レーザ光照射手段に対して指定されていた前記位置との前記画像上における差異を検出するように構成することができる。
【0016】
この構成によれば、レーザ光を継続して一点に集中させる照射を行うことなく所望の調整を行うことができるようになる。
また、前述した本発明に係る標本観察システムにおいて、前記レーザ光照射手段は、該レーザ光照射手段によって照射されるレーザ光を変調する変調手段と、該レーザ光照射手段によって照射されるレーザ光を前記標本上で走査させる走査手段と、を更に有し、前記走査手段は、該走査手段に入力される信号のレベルに対応する位置に前記レーザ光を照射し、該信号のレベルを変化させることで前記走査を行い、前記検出手段は、前記走査手段に入力されている信号で前記変調手段によって変調された前記レーザ光が該走査手段によって前記標本上を走査するときにおける、該標本上の所定の照射位置が照射される時刻と、前記レーザ光照射手段に対して該所定の照射位置への照射が指定された時刻との時間差を前記差異として検出し、前記変換手段は、前記走査手段に入力されている信号を、前記検出手段によって検出された前記時間差だけ遅延させて前記レーザ光照射手段に与え、前記変調手段は、前記変換手段によって遅延された信号で前記レーザ光を変調するように構成することができる。
【0017】
この構成によれば、画像取得装置あるいはレーザ走査装置自身が持つ測定位置ひずみの補償を行うことができるようになる。
また、前述した本発明に係る標本観察システムにおいて、前記レーザ光照射手段は、前記標本上の範囲の指定に応じ、該レーザ光照射手段によって照射されるレーザ光を該範囲に対して走査させる走査手段を更に有し、前記検出手段は、前記走査手段によって前記レーザ光の走査がされた前記標本上の範囲と、該範囲が走査されたときに前記走査手段に対して指示されていた前記範囲との差異を検出し、前記変換手段は、前記走査手段に対して指定される前記標本上の範囲を、前記検出手段によって検出された前記差異に基づいて拡大して前記レーザ光照射手段に与え、前記走査手段は、前記変換手段によって前記レーザ光照射手段に与えられた前記範囲を前記指定の範囲として前記レーザ光を走査させるように構成することができる。
【0018】
この構成によれば、標本における指定領域へのレーザ光の走査における領域の指定範囲と実際にレーザ光が照射される領域とのずれの補正を行うことができるようになる。
また、本発明の別の態様のひとつである標本観察システムの調整方法は、標本の像が表されている画像を取得する画像取得部を有する画像取得装置と、該標本上の位置の指定に応じ、該位置に向けてレーザ光を照射するレーザ光照射部を有するレーザ光走査装置とを備えている該標本の観察を行うためのシステムの調整方法であって、前記レーザ光の照射位置と、前記レーザ光照射部に対して指定された前記位置との差異の検出を行い、前記差異に基づいて行われる前記レーザ光照射部に対して指定される前記位置の変換であって、該レーザ光照射部に対して指定される該変換前の位置と、該変換が施された後の位置が指定された該レーザ光照射部によって照射されるレーザ光の照射位置との前記画像上における差異が、前記検出によって検出されていた差異よりも少なくなるような該変換を行い、前記変換が施された後の位置を該レーザ光照射部に対して指定するようにすることによって前述した課題を解決する。
【0019】
この方法によれば、前述した本発明に係る標本観察システムと同様の作用・効果を奏する。
【0020】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
まず、図1から図8にかけての各図面を参照しながら本発明に係る調整手法の基本原理を説明する。
【0021】
図1は本発明を実施する標本観察システムの基本構成を示している。
図1は、ステージ2と対物レンズ3とを有する顕微鏡装置4に、ポート52を介して画像取得装置6が取り付けられ、更に、ポート51を介してレーザ走査装置7が取り付けられた状態を示しており、ステージ2上には観察対象である標本1が配置されている。
【0022】
画像取得装置6は撮像素子としてCCDが備えられており、標本1の画像を取得する。取得された標本1の画像は同図では図示されていないパーソナルコンピュータ8(以下PC)によって画像情報として取り込まれる。
レーザ走査装置7は標本1に対して刺激を与えるため、あるいは標本1を加工するためにレーザ光を標本1へ照射する。レーザ走査装置7はこのレーザ光を偏向させる手段、本実施形態においては偏向用のミラーを有しており、標本1上の平面において直交しているX方向及びY方向にレーザ光の照射位置を移動させることができ、この照射位置はレーザ走査装置7に接続されるPC8によって制御される。なお、レーザ走査装置7がレーザ光を照射することのできる領域は必ずしも画像取得装置6の画像取得領域と一致していなくともよい。
【0023】
図1に示すように、画像取得装置6及びレーザ走査装置7の光学系は、これらの光軸がポート51及び52を各々通過した後、顕微鏡4内部に設けられているハーフミラー10の作用によって図中の点線で示すように1つの光路に合成され、対物レンズ3を通過して標本1に至るように配置される。
【0024】
これら2つの光学系の間でのずれが生じる要因には、第一に図2に示すような合成されたこれら2つの光軸の位置ずれ(角度を含む)、第二に画像取得装置6及びレーザ走査装置7が取り付けられているポート51及び52での取り付け角度の回転ずれ(光軸の回転ずれ)、第三に両光学系から対物レンズ端までで生じるレンズなどに起因する光学ひずみ、そして第四に画像取得装置6あるいはレーザ走査装置7自身が個々に持つ測定位置のひずみ(リニアリティ)が考えられる。
【0025】
以下、図1に示すシステムの調整の手法について説明する。
まず、調整のための準備として、レーザ光を反射するミラーなどを標本1としてステージ2上に配置する。また画像取得装置6及びレーザ走査装置7は各々標本1の表面でピントが合うように合焦位置の設定がされる。
【0026】
このように両者のピントが合った状態としたときにレーザ走査装置7によってレーザ光をスキャン(走査)させながら画像取得装置6で画像を取得させると、レーザ光の照射されている位置がレーザスポット(点)として表されている画像が取得できる。
【0027】
ここで、画像取得装置6による画像取得の速度とレーザ走査装置7の走査速度との差が十分に大きい場合には、画像取得装置6によって連続して繰り返し取得した画像を重ね合わせることでレーザ照射位置の軌跡が得られる。但し、両者の速度がほぼ同じ場合には、レーザ照射と画像取得との同期がとれないために取得されたレーザの照射位置の間隔が大きく離れてしまい、軌跡の取得がうまくできないことがあるので留意する。
【0028】
また、レーザ走査装置7に音響光学素子などを用いたレーザ光の変調手段がある場合、レーザ光のスキャン中に特定タイミングでレーザ光をON/OFFさせるような変調をレーザ光に与えることによってレーザ光の照射されたタイミングのみのパターンを同様に取得することもできる。
【0029】
このようにして得られた画像からその画像に示されているレーザ光の照射位置を示す画像上の座標(X’,Y’)を測定し、レーザ走査装置7に対して指示したレーザ光の照射位置の指示座標(X,Y)と、この座標(X’,Y’)との差(差異)を各点で算出する。
【0030】
以下、2つの光学系の間でのずれを生じさせる前述した4つの要因のそれぞれについて、その要因に応じたずれの解消の手法について説明する。
まず、前述した第一の原因である、画像取得装置6とレーザ走査装置7との光軸の位置ずれを解消する手法を説明する。
【0031】
図2に示したような画像取得装置6とレーザ走査装置7との光軸のずれによって生じるレーザ光の照射と取得画像との相対的なずれは取得画像の中心位置でのずれとして観測される。つまり、この相対的なずれは、図3に示すように、レーザ走査装置7に対して中心位置への照射を指示したときにレーザ光が実際に照射された照射位置(図3における格子中心)と、そのときに取得された画像の中心位置(図3における画像中心)とのずれを画素数の単位で算出することで知ることができる。
【0032】
レーザ走査装置7の振れ角及び走査領域の範囲は固定されているので、画像表示上で1画素あたりのレーザ光照射の振れ角は、
【0033】
その後、図4に示すように、この振れ角のずれ量θを見込んでレーザ走査装置7の偏向量を予めオフセットさせるように偏向用ミラーによる偏向動作を補正する制御を行えば、結果としてレーザ走査装置7に指示された照射位置の指示座標が座標平面に対して平行に移動されることとなり、画像取得装置6で取得される画像上の位置とレーザ走査装置7によって照射されるレーザ光の照射指示位置とをその画像の中心部において合わせ込むことができる。
【0034】
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
なお、図4においては、同図における縦方向についてレーザ光照射の振れ角の補正を行うことのみが示されているが、実際には同図における横方向についても同様の補正を行う。
【0035】
次に、2つの光学系の間でのずれを生じさせる前述した第二の要因である、画像取得装置6とレーザ走査装置7との光軸の回転ずれを解消する手法を説明する。
画像取得装置6による画像の取得領域とレーザ走査装置7によるレーザ光の照射領域とが回転するようにずれている状態では、画像取得装置6とレーザ走査装置7との両方もしくは一方の取り付け角度がずれているということがある。このような設置状態において水平方向にレーザ走査装置7を走査して画像取得装置6で画像を取得すると、取得される画像には、図5(a)に示すように、水平ではなく傾きを持ったレーザ光の照射の軌跡が表される。
【0036】
以下、この傾き量を求める。
前述したレーザ光照射の振れ角の補正を行った後に水平方向にレーザ走査装置7を走査して画像取得装置6で画像を取得する。この取得画像からレーザ光の照射位置を示す画像上の座標を2つのポイントにおいて測定し、レーザ走査装置7に対して指示したレーザ光の照射位置の指示座標とをこの2つのポイントで求める。
【0037】
この2つのポイント各々の指示座標とその各々に対応する照射位置の取得画像上の座標とを
【0038】
この角度分の回転ずれを補正するためには、指示座標(x,y)にレーザを照射する場合に、レーザ走査装置7でのレーザ光の偏向量をx方向成分とy方向成分とに分解して−θだけ回転させる座標変換を行えばよい。具体的には、x軸及びy軸の各々について、指示座標(x,y)に対し、
【0039】
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
次に、2つの光学系の間でのずれを生じさせる前述した第三の要因である、両光学系から対物レンズ端までで生じるレンズなどに起因する光学ひずみを補償する手法を説明する。
【0040】
レンズ類などによる光学系のひずみが存在している状態において、その軌跡が等間隔の格子状となるようなレーザ光の照射をレーザ走査装置7に行わせ、その画像を画像取得装置6に取得させる。このようにして取得された画像は、図6(a)に示すように、本来は等間隔であるはずの格子の間隔が変化して表される。
【0041】
この取得画像に表されている格子の升目の位置(画像の中心の升目の交点を原点とする)とその升目の間隔の変化量との関係をプロットしたものが図6(b)のグラフである。このグラフより、照射位置(偏向角度)あたりのひずみ量(ずれ)を関数として表すことができる。
【0042】
ここで、xをレーザ走査装置7に対する照射指示位置(すなわち画像の中心からの距離)、yをレーザ光が実際に照射された照射位置とし、この関数をfとすると、y=f(x)という関係になる。ここで照射される位置yを照射指示位置xとするためには、x=f(x’)となるように入力x’を定める必要がある。
つまり、x’=f−1(x)なる変換をxについて施し、この変換によって得られる値x’をレーザ走査装置7に対する照射指示の値とすればよい。
【0043】
以上のようにすることによって光学系で生じたひずみが補償され、図6(c)に示すように、画像取得装置6で取得される画像にはレーザ光の軌跡が等間隔の格子として表されるようになる。
なお、図6においては、同図における横方向についてレーザ光照射の振れ角の補正を行うことのみが示されているが、実際には同図における縦方向についても同様の補正を行う。
【0044】
また、図6においては軌跡が等間隔の格子状となるようなレーザ光の照射をレーザ走査装置7に行わせているが、所定の照射位置、例えば図6に示す軌跡によって形成されている格子の交点の位置にレーザ光を照射させるようにレーザ走査装置7を制御し、このときの照射指示位置と実際にレーザ光が照射された位置とのずれ量を求め、このずれ量を基にして上述した関数fを更に求め、この関数fの逆関数f−1よりレーザ走査装置7に対する照射指示の値を設定するようにしてもよい。
【0045】
なお、画像取得装置6自身で生じさせているひずみが存在するとしても、このひずみは上述した光学系のひずみの一部として観測されるので、上述した手法で補償を行えば画像取得装置6自身で生じさせているひずみの影響も軽減される。
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
【0046】
次に、2つの光学系の間でのずれを生じさせる前述した第四の要因である、画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみを補償する手法を説明する。
いままでに説明した手法を全て行うことにより、レーザ走査装置7によるレーザ光の照射位置が1点に停止している状態の校正は行われる。しかし、レーザ走査装置7によってレーザ光のラスタスキャンを行う場合、常にレーザの位置は移動をしているため、前述の校正を行った項目の他に、レーザ走査装置7自身の応答遅れ(照射位置を移動させるための入力をしてからその指示位置まで照射位置が移動するまでの遅れ時間)や走査位置のひずみ特性(スキャン用の変調信号の変化に対する偏向用ミラーの偏向角度変化の追従性の悪さ)が照射位置のずれに影響を及ぼす。そしてこれらの量は走査速度が速いほど取得画像上での影響が大きくなることが知られている。ここでは、この両者を測定位置ひずみとし、この補償の手法について説明する。
【0047】
まず、レーザ走査装置7においてレーザ光を変調しながら縦方向・横方向にラスタスキャンを行わせ、図7の様な格子状のレーザ光の照射軌跡が標本1に表されるように偏向ミラーの制御を行う。この状態で画像取得を画像取得装置6に行わせると取得画像には格子状の軌跡が示される。
【0048】
いままでに説明した手法を予め全て行っていれば静止状態でのレーザ光の照射位置の校正は既になされている。従って、この取得画像に現れた格子の位置ずれはレーザ走査装置7自身に起因するものである。そこで、この格子の中心位置のずれを前述した画像取得装置6とレーザ走査装置7との光軸の位置ずれを解消する手法と同様に測定する。この中心位置のずれから照射位置のずれが求められる。
【0049】
ラスタスキャンでレーザ光の走査を行う場合、レーザ光の照射位置を変化させるために偏向ミラーに与えられる制御信号とその制御信号に応答して変化する偏向ミラーの向きとは、一般に図8の様な時間関係が認められる。同図においてここで問題としているレーザ走査装置7自身の応答遅れとはこの図におけるt1の部分である。つまり、この制御信号に時間遅れを持たせることなく同期させてレーザ光の照射を行うようにしてしまうと、標本1での照射位置はt1時間前の位置になってしまうということである。
【0050】
この時間遅れはレーザ走査装置7固有の特性のため、この特性をうち消すように制御信号を加工することは難しい。そこで、レーザ光の照射タイミングの制御を行うようにする。具体的には、制御信号からt1時間分遅らせたものからレーザ光の照射タイミングを得るようにしてレーザ光のON/OFF制御を行う。こうすることにより、図8に示すように、所望のレーザ光の照射位置に精度よくレーザを照射することができるようになる。
【0051】
なお、前述した他の手法と同様、この手法でも図7における縦・横の両方向について測定位置ひずみの補償を行うようにする。
なお、これらの処理はレーザ走査装置7から発せられるレーザ光の照射位置の制御を行うPC8が所定の制御ソフトウェアを実行することによって実現させることができる。
【0052】
以下、上述した本発明に係る調整手法の基本原理を用いた具体的な実施例を幾つか説明する。
[実施例1]
図9は実施例1の標本観察システムの構成を示している。
【0053】
同図に示す構成は、CCD撮像装置61を備え、CCD撮像装置61の有するCCD素子によって取得された画像を一旦PC8に取り込んだ後、取得画像をモニ夕9に表示する画像取得装置6と、ミラー11の取り付けられた2つのガルバノメータ12が直交した位置に配置され、レーザ光源13からレーザ導入光路14を経て送られてくるレーザ光をそれそれ標本1の表面において直交するX軸方向及びY軸方向に偏向させることのできるレーザ走査装置7とを組み合わせてなるシステムである。
【0054】
CCD撮像装置61はポート52で顕微鏡4に接続され、対物レンズ3を介して標本1の像を取得する。取得された画像を表現する情報はPC8に取り込まれて処理が施され、標本1の画像としてモニタ9に表示される。またPC8はその取得画像上の特徴点を抽出し、その特徴点の位置を座標として読みとることができる。
【0055】
レーザ走査装置7はPC8によって2つのガルバノメータ12の動作角が制御され、PC8からの指示に応じた角度だけミラー11が移動する。この制御動作が2つのミラー11の各々に対して行われることにより、X軸方向及びY軸方向の各々任意の方向にレーザ光を偏向させることができる。偏向されたレーザ光はレーザ走査装置7との接続部であるポート51を通過し、対物レンズ3を通って標本1に照射される。
【0056】
なお、PC8は、標準的な構成を有するコンピュータ、すなわち、制御プログラムを実行することで各構成要素を制御するCPUと、ROMやRAM及び磁気記憶装置などからなり、CPUに各構成要素を制御させる制御プログラムの記憶やCPUが制御プログラムを実行する際のワークメモリあるいは各種データの記憶領域として使用される記憶部と、ユーザによる操作に対応する各種のデータが取得される入力部と、モニタ9などに各種のデータを提示してユーザに通知する出力部と、ネットワークに接続するためのインタフェース機能を提供するI/F部とを備えるコンピュータである。
【0057】
CCD撮像装置61によって取得される画像上の位置とレーザ走査装置7へのレーザ光照射の指示位置とを整合させる調整を行うとき、まず標本1としてミラーをステージ2上に置く。そして、まずCCD撮像装置61で標本1の表面にピントが合うように顕微鏡4のフォーカスを合わせる。このフォーカス調整を済ませれば、レーザ走査装置7はこの同一の対物レンズ3を介して標本1へレーザ光を照射するため、こちらの光学系におけるフォーカスも標本1の表面に合う。
【0058】
まずレーザ走査装置7の走査領域の中心にレーザ光を照射している状態でCCD撮像装置61によって画像を取得すると、図10に示すように、取得画像の中心付近にレーザスポットが表示される。このスポットの座標と取得画像の中心の座標との差がCCD撮像装置61とレーザ走査装置7との光軸のずれになる。
【0059】
このずれ量を前記の換算式(1)を利用してレーザ走査装置7のミラー11の振れ角へと変換する。そして、図4に示したように、この振れ角に当たる量だけレーザ走査装置7のミラー11の振れ角をオフセットさせて駆動させるようにする。この結果レーザ光の走査領域の中心と取得画像の中心は一致し、CCD撮像装置61とレーザ走査装置7との光軸の位置ずれが補正される。
【0060】
次に、これらの中心の補正を行った後に、画像取得範囲における例えば中心から水平あるいは垂直の位置に存在するいずれかの端の一点にレーザ光を照射し、これらの照射点の画像上のずれ量を画素数の単位で測定する。このずれ量を式(3)に当てはめるのだが、先に行った補正によって取得画像の中心は既に一致させているので、CCD撮像装置64を基準としたレーザ走査装置7のポート51への取り付け向きの回転ずれθは
【0061】
以降、レーザ走査装置7で指示座標(x,y)の位置にレーザ光の照射を行うときには、この(x,y)の値と上式によって求めたθとを式(4)に代入して得られる値で2つのガルバノメータ12を駆動する。こうすることで、前記の取り付けの回転ずれが補正され、図6に示したように、レーザ光を精度よく走査することができる。
【0062】
次に、PC8で行わせている処理を変更し、CCD撮像装置61で取得された画像を重ね合わせてモニタ9に表示させるようにする。この処理によりレーザ光を標本1上で走査させるとレーザ光の照射箇所は光量が上がるため、レーザ光の照射された点が軌跡となって表示される。
【0063】
ここで、レーザ走査装置7を制御して一定間隔の直線あるいは格子が軌跡として得られるようにレーザ光を走査させるようにする。このとき光学系などのひずみが存在する場合、CCD撮像装置61で取得された画像に現れる直線の間隔が一定ではなくなる。このとき、この変化した間隔を測定し、xをレーザ走査装置7に対する照射指示位置、そしてyをレーザ光が実際に照射された照射位置と照射指示位置とのずれとし、xとyとの関係を示す関数y=f(x)を求める。この関数は、例えば予め関数の次数を定めておき、各係数を最小二乗法等の使用によって推定することで獲得することができる。
【0064】
その後、このようにして得られた関数の逆関数f−1(x)を導き、以降、レーザ走査装置7で指示座標の位置にレーザ光の照射を行うときには、この指示座標の値をこの逆関数に入力して変換し、この変換によって得られた値でガルバノメータ12を駆動する。こうすることで、画像取得装置6とレーザ走査装置7との両光学系で生じるレンズなどに起因する光学ひずみが補償される。
【0065】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図11について説明する。同図はこの実施例1においてPC8によって行われる制御処理の処理内容を示すフローチャートである。同図に示す処理は上述した制御プログラムをPC8で実行させることによって行われる。
【0066】
図11(a)は、CCD撮像装置61とレーザ走査装置7との光軸の位置ずれの補正処理の処理内容を示している。
まず、S111において、まずミラーを標本1としてステージ2上にセットすることをこのシステムの使用者に促す表示をモニタ9に表示させる。
【0067】
ミラーのセットが確認されたら処理はS112に進み、CCD撮像装置61での取得画像のピントが合うように顕微鏡4のフォーカスを合わせる操作をこのシステムの使用者に促す表示をモニタ9に表示させる。なお、この処理として、PC8がCCD撮像装置61での取得画像に基づいて顕微鏡4のフォーカスを自動的に制御するいわゆるオートフォーカス制御処理を行うようにしてもよい。
【0068】
フォーカス調整の完了が確認されたら処理はS113に進み、レーザ走査装置7を制御し、その走査領域の中心の座標を指定してレーザ光を照射させる。そして続くS114においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0069】
S115では取得された画像からレーザスポットを見つけ出し、このレーザスポットの画像上における座標を取得する。
S116では、S113の処理においてレーザ走査装置7に対して指定したその走査領域の中心の座標と、S115の処理によって取得されたレーザスポットの画像上における座標との差を求めてCCD撮像装置61とレーザ走査装置7との光軸のずれ量を算出し、前記の換算式(1)を利用してこのずれ量をレーザ走査装置7のミラー11の振れ角へと変換する。
【0070】
S117ではレーザ走査装置7を制御し、S116の処理によって得られた振れ角だけミラー11の振れ角をオフセットさせる。
以上までの処理がCCD撮像装置61とレーザ走査装置7との光軸の位置ずれの補正処理である。
【0071】
次に図11(b)の処理を説明する。この処理はCCD撮像装置61とレーザ走査装置7との光軸の回転ずれの補正処理の処理内容を示している。
なお、この処理は前述したCCD撮像装置61とレーザ走査装置7との光軸の位置ずれの補正処理を完了してから行うようにする。
【0072】
同図におけるS121及びS122の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
S122の処理の後、フォーカス調整の完了が確認されたら処理はS123に進み、レーザ走査装置7を制御し、その走査領域の中心から水平あるいは垂直の位置に存在するいずれかの端の一点にレーザ光を照射させる。そして続くS124においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0073】
S125では取得された画像からレーザスポットを見つけ出し、このレーザスポットの画像上における座標を取得する。
S126では、S123の処理においてレーザ走査装置7に対して指定したその照射位置の座標と、S125の処理によって取得されたレーザスポットの画像上における座標とを前記の換算式(5)に代入し、CCD撮像装置61とレーザ走査装置7との光軸の回転ずれの角度を算出する。
【0074】
S127では、S126の処理によって得られた角度を前記の(4)式に代入し、ガルバノメータ12の駆動指示をこの(4)式によって算出される値に基づいて行うようにレーザ走査装置7の制御処理の設定を行う。
以上までの処理がCCD撮像装置61とレーザ走査装置7との光軸の回転ずれの補正処理である。
【0075】
次に図11(c)の処理を説明する。この処理は画像取得装置6とレーザ走査装置7との両光学系で生じる光学ひずみの補償処理の処理内容を示している。
なお、この処理は前述したCCD撮像装置61とレーザ走査装置7との光軸の位置ずれ及び回転ずれの両補正処理を完了してから行うようにする。
【0076】
同図におけるS131及びS132の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
S132の処理の後、フォーカス調整の完了が確認されたら処理はS133に進み、レーザ走査装置7を制御し、その走査領域の四隅を含む領域内の複数の位置のいずれかにレーザ光を照射させる。そして続くS133においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込み、既に得られている画像と重ね合わせる。そして、S135においてこのS133及びS134の処理を所定数回繰り返し、レーザ光の照射位置の軌跡が表されている画像を作成する。
【0077】
なお、S133において、走査領域の四隅をレーザ照射の位置として特掲しているのは、この位置が最も大きな光学ひずみを受けていると考えられるからである。
S135の判定処理の結果がYesとなり、S133及びS134の処理の所定回数の繰り返しが完了したときにはS136へと処理が進み、レーザ光の照射位置の軌跡が表されている画像から、その軌跡を構成している全てのレーザスポットの画像上における座標を取得する。
【0078】
続くS137において、S133の処理においてレーザ走査装置7に対して指定したレーザ光の照射位置の座標と、S136の処理によって取得されたレーザスポットの画像上における座標との差を算出する。
S138では、S137の算出結果から、S133の処理においてレーザ走査装置7に対して指定したレーザ光の照射位置の座標と、その指定座標でのレーザ光の照射位置のずれとの関係を示す関数を求める。
【0079】
S139では、S138の処理によって得られた関数の逆関数を算出し、ガルバノメータ12の駆動指示をこの逆関数による変換によって得られる値に基づいて行うようにレーザ走査装置7の制御処理の設定を行う。
以上までの処理が画像取得装置6とレーザ走査装置7との両光学系で生じる光学ひずみの補償処理である。
【0080】
なお、以上までに説明した各処理によって一旦得られた調整のための各値をPC8の有する記憶装置に格納しておくようにすれば、このシステムの使用開始時にこれらの調整処理を毎度行うような手間を省くことができる。
また、実施例1においてはレーザ光の照射位置をCCD撮像装置61による取得画像に表すために標本1としてミラーを用いたが、その代わりに一様に染色され、レーザ光によって励起される蛍光標本を用いるようにしてもよい。また、CCD撮像装置61の画像取得感度が十分に高いのであればガラス表面の反射を取得するようにしてもよい。また、実施例1では画像取得装置6としてCCD撮像装置61を用いたが、TVカメラ等の撮像装置であってもよい。
【0081】
また、実施例1のシステムは画像取得装置6とレーザ走査装置7とを1つずつ備えた構成としていたが、複数の画像取得装置6を設け、個別にレーザ走査装置7との間のずれを補償する調整値を求めるようにしてもよい。
[実施例2]
図12は実施例2の標本観察システムの構成を示している。同図に示す構成と図9に示した実施例1の構成との違いは、顕微鏡4の透過像位置にCCD撮像装置61を配置し、落射側にレーザ走査装置7を配置した点にある。この実施例2のような構成は、CCD撮像装置61が標本1の微分干渉像などの透過像を取得するために好適なものである。
【0082】
この実施例2に示す構成では、レーザ走査装置7から照射されたレーザ光は対物レンズ3を通過し標本面と反対側のCCD撮像素子61に直接照射される。このため実施例1のように両者の照射位置を調整する場合、実施例1では撮像素子にレーザ光を送るため標本1としてミラーを配置したが、実施例2ではこのような調整用の標本1は不要である。
【0083】
なお、この実施例2において、CCD撮像装置61によって取得される画像上の位置とレーザ走査装置7へのレーザ光照射の指示位置とを整合させる調整の手順は実施例1と全く同じである。
また、この実施例2においてPC8によって行われる制御処理の処理内容を示すフローチャートを図13に示す。同図を図11に示したフローチャートと比較すると分かるように、図11におけるS111、S121、S131の処理、すなわちミラーを標本1としてステージ2上にセットすることを使用者に促す処理が図13に示されている処理では行われないことを除けば、この両処理は同様の処理である。
【0084】
なお、この図12に示した実施例2のシステムではステージ2の真下にCCD撮像装置61を配置したが、この位置は標本1の透過画像が結像する位置であればステージ2の真下に限定されるものではない。また、実施例2では画像取得装置6としてCCD撮像装置61を用いたが、TVカメラ等の撮像装置であってもよい。
[実施例3]
実施例3は、実施例1におけるレーザ走査装置7若しくはレーザ光源13がレーザ光の変調を行う変調部を備えているというシステムである。音響光学素子を用いたAOM(Acoustic Optical Modulator)やAOTF(Acoustic Optical Tunable Filter )を備えたレーザ光の変調部を有していれば、スキャニング中に高速でレーザ光のON/OFF制御を行うことで容易に特定領域の範囲だけにレーザ光の照射を行うことができる。なお、このシステムではレーザ走査装置7若しくはレーザ光源13に備えられている変調部をPC8によって制御可能なように構成する。
【0085】
このシステムでは、まずレーザ光が常に照射される状態にレーザ走査装置7を設定した上で、前述した実施例1におけるものと同様の調整を行い、CCD撮像装置61とレーザ走査装置7との光軸の位置ずれ及び回転ずれの補正、並びに両光学系で生じる光学ひずみの補償を行う。
【0086】
次に、画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみを補償するための調整を行う。
具体的には、レーザ走査装置7を制御してラスタスキャンを行なわせながら照射中のレーザ光を変調し、図10に示したような格子模様にレーザ光が走査されるようにする。この状態でCCD撮像装置61に画像の取得を行わせるとその画像に格子状の軌跡が表れる。先に、静止状態(スキャンを行わない状態)での調整は終えているのでここで表示された格子の位置ずれはすべてレーザ走査装置7自身に起因している。そこで、この格子の中心位置のずれを前述した画像取得装置6とレーザ走査装置7との光軸の位置ずれを解消する手法と同様に測定する。
そして、この中心位置のずれから応答遅れ(レーザ光照射のタイミングずれ)を算出する。
【0087】
ここで算出タイミングのずれ量であるt1時間分だけ、レーザ光の照射タイミングを遅らせるようにレーザ走査装置7を制御する。すなわち、図8に示したように、照射指示の入力に対してt1時間分遅らせてレーザのON/OFF制御を行う。こうすることによりレーザ光の照射を所望の位置に行えるようになる。
【0088】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図14について説明する。同図はこの実施例3においてPC8によって行われる制御処理のうち、画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみの補償処理の処理内容を示している。
【0089】
なお、この処理は前述したCCD撮像装置61とレーザ走査装置7との光軸の位置ずれ及び回転ずれの両補正処理、並びに両光学系で生じる光学ひずみの補償処理を完了してから行うようにする。
同図におけるS311及びS312の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
【0090】
フォーカス調整の完了が確認されたら処理はS313に進み、レーザ走査装置7を制御してレーザ光を照射させ、その走査領域を走査させる。ここで続くS314においてレーザ走査装置7に指示を与えてレーザ光を変調し、図10に示したような格子模様にレーザ光が走査されるようにする。そして続くS315においてCCD撮像装置61にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0091】
S316では、S315の処理によって取得された画像に表されているレーザ光の軌跡における格子の中心の交点の画像上における座標を取得する。
S317では、S315の処理によって取得された画像の中心の座標とS316の処理によって取得された格子の中心の交点の座標との差を求め、この差を時間の単位に変換する。この変換は、両座標の距離をレーザ光の走査速度で除算することによって行われる。この変換によって、格子の中心の交点の座標の照射指示がされた時刻と、格子の中心の交点の座標が照射された時刻との時間差が得られる。
【0092】
S318では、レーザ光走査装置7内においてレーザ光の照射のタイミングの制御信号をS317の処理によって得られた時間だけ遅らせる設定を行う。
以上までの処理が画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみの補償処理である。
【0093】
なお、以上までに説明した処理によって一旦得られた調整のための各値をPC8の有する記憶装置に格納しておくようにすれば、このシステムの使用開始時にこれらの調整処理を毎度行うような手間を省くことができる。
また、レーザの変調を行う手段として本実施例では音響光学素子を用いたが、レーザ自身で変調を与えることのできる半導体レーザを用いるようにしてもよい。
【0094】
また、調整時にレーザ光を照射させて生成する軌跡のパターンは、図10に示したような升目の格子パターンでなくとも、中心位置と等間隔に並んだ何カ所かの照射位置とが読みとれるようなパターンであればどのようなでもよい。
なお、前述した画像取得装置6あるいはレーザ走査装置7自身が持つ測定位置ひずみのうち、走査位置のひずみ特性に関しては、走査範囲の両端付近を除く範囲においてひずみ無くほぼ一定の速度で走査をさせるように駆動させる技術はすでに数多く存在するので、この周知の技術を採用することで走査ひずみの補償をおこなうようにしてもよい。
【0095】
なお、実施例3は、実施例1におけるレーザ走査装置7がレーザ光の変調を行う変調部を備えているというシステムとしたが、実施例2におけるレーザ走査装置7がレーザ光の変調を行う変調部を備えているというシステムであっても実施例3において行ったものと同様の調整手法を採用することができる。
[実施例4]
図15は実施例4の標本観察システムの構成を示している。同図に示す構成と図9に示した実施例1の構成との大きな違いは、画像取得装置6としてCCD撮像装置61の代わりにレーザ走査型顕微鏡62が装備されている点にある。
【0096】
レーザ走査型顕微鏡装置62(以下、「LSM」と称することとする)は、レーザ走査装置7と同様に、ミラー110の取り付けられた2つのガルバノメータ120でレーザ光源130から発せられたレーザ光を偏向させ、標本1面にレーザを照射する。標本面に当てられたレーザ光の反射光あるいは蛍光は対物レンズ3を通過してダイクロイックミラー140で反射され、光電子増倍管やフォトダイオードなどを有して構成される検出装置150に送られ、光の強度の変化として記録される。この光強度の変化情報が画像情報としてPC8に送られ、PC8において画像として構成される。またPC8はその取得画像上の特徴点を抽出し、その特徴点の位置を座標として読みとることができる。
【0097】
レーザ走査装置7はPC8によって2つのガルバノメータ12の動作角が制御され、PC8からの指示に応じた角度だけミラー11が移動する。この制御動作が2つのミラー11の各々に対して行われることにより、X軸方向及びY軸方向の各々任意の方向にレーザ光を偏向させることができる。偏向されたレーザ光はレーザ走査装置7との接続部であるポート51を通過し、対物レンズ3を通って標本1に照射される。
【0098】
LSM62によって取得される画像上の位置とレーザ走査装置7へのレーザ光照射の指示位置とを整合させる調整を行うとき、まず標本1としてミラーをステージ2上に置く。そして、まずCCD撮像装置61で標本1の表面にピントが合うように顕微鏡4のフォーカスを合わせる。このフォーカス調整を済ませれば、レーザ走査装置7はこの同一の対物レンズ3を介して標本1へレーザ光を照射するため、こちらの光学系におけるフォーカスも標本1の表面に合う。
【0099】
この実施例4のシステムに対して行う調整手法は、実施例1と全く同じ手順で行うことができるので説明は省略する。
なお、レーザ走査装置7から照射されたレーザ光の照射位置が表されている画像をLSM62で取得できるようにするためにへ映し出すために標本1としてミラーを用いたが、その代わりに一様に染色され、レーザ光によって励起される蛍光標本を用いるようにしてもよい。また、LSM62の画像取得感度が十分に高いのであればガラス表面の反射を取得するようにしてもよい。
【0100】
更に、一様な蛍光標本の各点に高エネルギーのレーザ光を照射することで、部分的に蛍光退色をおこさせ、LSM62でその退色痕を観察測定するようにして調整を行うこともできる。こうすることにより、レーザ光の照射位置の軌跡を得るためにPC8で画像を累積合成する処理が不要となる。
【0101】
また、実施例4ではレーザ走査装置7が専らレーザ光を照射するための装置としていたが、レーザ走査装置7へ戻ってくるレーザ光の強度を測定する検出装置を備えているもの、例えば、レーザ走査装置7としてもLSMを用いて2つのLSMを組み合わせたシステムを構成し、その一方をレーザ走査装置7として機能させ、他方を画像取得装置6として機能させるようにしてもよい。
[実施例5]
実施例5は、実施例4におけるレーザ走査装置7若しくはレーザ光源13がレーザ光の変調を行う変調部を備えているというシステムである。この実施例5のシステムに対して行う調整手法は、実施例3と全く同じ手順で行うことができるので説明は省略する。
[実施例6]
実施例6は、実施例1、3、4、または5のシステムであるレーザ走査装置7若しくはレーザ光源13がレーザ光の変調を行う変調部を備えているシステムであり、これらのシステムで、取得画像中におけるレーザ光を照射する位置・範囲が予め特定されている場合の調整の手法である。
【0102】
まず、実施例1または実施例4のシステムでの調整の手法を説明する。
前述した実施例1または実施例4では、画像取得装置6で取得される画像の中心付近に表れるレーザスポットの位置に基づいて光軸の位置ずれの補正を行い、またその光軸の位置ずれの補正結果に基づいて、光軸の回転ずれ及び光学系のひずみの補償を行うようにしていた。これに対し、これに対し、実施例6では、レーザ光の照射位置が実験前に予め特定されているような場合に、この照射位置に基づいて光軸の位置ずれの補正を行い、またその光軸の位置ずれの補正結果に基づいて、光軸の回転ずれ及び光学系のひずみの補償を行うようにする。こうすることにより、その指定領域内においては、実施例1または実施例4による調整のみによるものよりも更に精度の良い光学ひずみの補償が可能となる。
【0103】
次に、実施例3または実施例5のシステムでの調整の手法を説明する。
前述した実施例3または実施例5では、画像取得装置6で取得される画像の中心部で観測されるレーザ光照射のタイミングずれに基づいてレーザ光の走査範囲の全域に渡る光学ひずみの補償を行っていた。これに対し、実施例6では、例えば蛍光を発する標本1に部分的に蛍光退色を起こさせる等の目的で、図16に示すように、標本1における特定の領域のみを走査するようにその変調部を制御してレーザ光を照射させるときにおける、領域の指定範囲と実際にレーザ光が照射される領域との位置ずれを補正する手法を説明する。
【0104】
まず、前述した光軸、回転、光学ひずみの調整を、指定領域の中心(微小領域走査の中心)の位置に基づいて全て行う。これにより、指定領域の中心(微小領域走査の中心)付近に対してレーザ光を照射させることが可能となる。
ここで、指定領域分のみにレーザ光を照射するために、指定領域の範囲にレーザ光が照射される角度にミラー11の角度が達したときにレーザ光を照射する必要がある。
【0105】
このような照射を可能とするためには、前述した実施例3の調整手法を適用してレーザ光照射のタイミングずれを算出し、レーザ走査装置7に対して指定領域の開始位置に照射させるためのタイミングから時間t1だけ遅らせてレーザを照射し、同様に指定領域の終止位置に照射させるためのタイミングから時間t1だけ遅らせてレーザ光の照射を中断する。これを繰り返すことで指定の領域に正しくレーザ照射を行うことが可能となる。また、このように指定の領域内で観測されるレーザ光照射のタイミングずれに基づいてレーザ光の走査範囲である指定領域内における光学ひずみの補償を行うことにより、その指定領域内においては、実施例3または実施例5による調整のみによるものよりも更に精度の良い光学ひずみの補償が可能となる。
【0106】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図17について説明する。同図はこの実施例6においてPC8によって行われる制御処理の処理内容を示すフローチャートである。同図に示す処理は上述した制御プログラムをPC8で実行させることによって行われる。
【0107】
図17(a)は、実施例1または実施例4のシステムにおいて予め特定されている指定位置へのレーザ光の照射を行うときの制御処理の処理内容を示している。
まず、S611において、観察・実験対象である蛍光を発する標本1をステージ2上にセットすることをこのシステムの使用者に促す表示をモニタ9に表示させる。
【0108】
標本1のセットが確認されたら処理はS612に進み、CCD撮像装置61での取得画像のピントが合うように顕微鏡4のフォーカスを合わせる操作をこのシステムの使用者に促す表示をモニタ9に表示させる。なお、この処理として、PC8がCCD撮像装置61での取得画像に基づいて顕微鏡4のフォーカスを自動的に制御するいわゆるオートフォーカス制御処理を行うようにしてもよい。
【0109】
S612の処理の後、フォーカス調整の完了が確認されたら処理はS613に進み、CCD撮像装置61(あるいはLSM62)にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
S614では、S613の処理によって取り込まれた画像をモニタ9に表示させ、レーザ光を照射する指示位置をこの表示画像上から選択することをこのシステムの使用者に促す表示をモニタ9に表示させる。
【0110】
使用者による指示位置の選択が確認されたら処理はS615に進み、この指示位置の座標を取得する。
S616では照射指示位置の座標からレーザ走査装置7への入力値への変換処理が行われる。この処理は、具体的には、図11(a)のS113からS117にかけての処理、図11(b)のS123からS127にかけての処理、および図11(c)のS131からS138にかけての処理を順に行って、S615の処理によって取得された指示位置の座標に基づいた光軸の位置ずれ及び回転ずれの補正処理並びに光学ひずみの補償処理を行う。そして、これらの処理によって算出された各設定値を用いてS615の処理によって取得された指示位置の座標の変換を行う。
【0111】
S617では、S616の処理における変換によって得られた座標をレーザ走査装置7へ送付し、続くS618において、その送付された座標を照射指示座標としたレーザ光の照射の設定をレーザ走査装置7に行う。
S619では、S618の処理によってなされたレーザ光の一点照射の設定の下で所定の実験・観察がこのシステムの使用者によって行われる。
【0112】
以上までの処理が実施例1または実施例4のシステムにおいて予め特定されている指定位置へのレーザ光の照射を行うときの制御処理である。
次に図17(b)の処理を説明する。この処理は実施例3または実施例5のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うときの制御処理の処理内容を示している。
【0113】
同図におけるS621及びS622の処理はそれぞれ前述した図17(a)のS611及びS612の処理と同様である。
S622の処理の後、フォーカス調整の完了が確認されたら処理はS623に進み、CCD撮像装置61(あるいはLSM62)にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0114】
S624では、S623の処理によって取り込まれた画像をモニタ9に表示させ、レーザ光を照射する指示領域をこの表示画像上から選択することをこのシステムの使用者に促す表示をモニタ9に表示させる。
使用者による指示領域の選択が確認されたら処理はS625に進み、この指示領域を特定するための座標、例えば指示領域を囲む矩形の各頂点の座標と、この指示領域を代表する位置の座標、例えば指示領域の中心の座標とを取得する。
【0115】
S626では照射指示領域の座標からレーザ走査装置7への入力値への変換処理が行われる。この処理は、具体的には、図11(a)のS113からS117にかけての処理、図11(b)のS123からS127にかけての処理、および図11(c)のS131からS138にかけての処理を順に行って、S625の処理によって取得された指示領域を代表する位置の座標に基づいた光軸の位置ずれ及び回転ずれの補正処理並びに光学ひずみの補償処理を行う。そして、これらの処理によって算出された各設定値を用いてS625の処理によって取得された指示領域を特定するための座標の変換を行う。
【0116】
S627では、S626の処理における変換によって得られた各座標をレーザ走査装置7へ送付する。
S628では、照射指示領域の座標からレーザ光の変調信号に与える遅延時間への変換処理が行われる。この処理は、図14のS316からS318にかけての処理を行ってS625の処理によって取得された指示領域を代表する位置の座標に基づいた測定位置ひずみの補償処理を行う。
【0117】
S629では、S628の処理における変換によって得られた遅延時間だけ送られた変調信号をレーザ光の変調部へ送付する。
S630では、S627の処理によって送付された各座標で特定される領域を照射指示領域としたレーザ光の走査の設定をレーザ走査装置7に行う。
【0118】
S631では、S630までの処理によってなされたレーザ光の走査の設定の下で所定の実験・観察がこのシステムの使用者によって行われる。
以上までの処理が実施例3または実施例5のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うときの制御処理である。
[実施例7]
実施例7は、実施例3または5のシステムに対して実施例6のようにして行われた指定領域の走査における領域の指定範囲と実際にレーザ光が照射される領域とのずれの補正を、レーザ光の変調部を有しない実施例1、2、または4のシステムにおいて行うものである。
【0119】
実施例1、2、及び4のシステムはいずれもレーザ光の変調部を有していないため、前述したような指定領域の走査を行うためにレーザ光をON/OFFすることができない。このため、照射領域はレーザの振れ角、すなわちミラー11の振れ角そのものとなる。ところが、図18に示すように、ミラー11を駆動するための制御信号とミラー11の実際の振れ角との間には応答遅れがあるため一致しない。そのため、所望の領域にレーザ光を照射しようとしても、その所望の領域よりも狭い範囲にしかレーザ光を照射することができないことがある。しかも、この照射不良の範囲は、ミラー11を高速に動作させようとしてミラー11の駆動制御信号の周波数を高めればそれだけ拡大してしまう。
【0120】
この照射不良の範囲を減少させるため、前述した実施例1、2、4の各々の調整手法を予め行っておき、その後に特定の領域走査を行ったときの実際の照射範囲をレーザ光の照射位置の軌跡として測定し記録しておく。そして、ミラー11の駆動制御信号に対して振れ角が不足する分だけ、その駆動制御信号の振幅を増加させてミラー11の振れ角をそれだけ大きくする。
【0121】
このときの駆動制御信号の振幅の増加比率は以下のようにして求める。
図18において、レーザ光の走査を行わせるためにミラー11へ制御信号を与えてレーザを走査させたときのミラー11の動きは図中の波形のようになり、標本1上での振れ幅はbになる。このbの幅を画像取得装置6で測定することにより、その制御信号によって指示を行っているレーザ光の振れ幅aとの比率b/aを求めることができる。この比率は、指示を行っているレーザ光走査の範囲と実際に走査された範囲との差異を示すものである。
【0122】
ここで、この比率b/aだけミラー11の振れ角を拡大させる。こうすることで、レーザ光の走査範囲が拡大され、標本1上で必要な振れ幅を確保できるようになる。
なお、この比率は駆動制御信号波形の形状によって異なるのでレーザ光の走査に使う波形毎にその比率を求めておく必要がある。
【0123】
なお、上述した各処理はCCD撮像装置6及びレーザ走査装置7の制御を行うPC8が予め用意されている制御プログラムを実行することによって実現される。
ここで図19について説明する。同図はこの実施例7においてPC8によって行われる制御処理であって、レーザ光の変調部を有していない実施例1、2、及び4のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うための処理の処理内容を示すフローチャートである。同図に示す処理は上述した制御プログラムをPC8で実行させることによって行われる。
【0124】
同図におけるS711及びS712の処理はそれぞれ前述した図11(a)のS111及びS112の処理と同様である。
S712の処理の後、フォーカス調整の完了が確認されたら処理はS713に進み、CCD撮像装置61(あるいはLSM62)にこの画像を取得させ、PC8にこの画像を表している情報を取り込む。
【0125】
S714では、S713の処理によって取り込まれた画像をモニタ9に表示させ、レーザ光を照射する指示領域をこの表示画像上から選択することをこのシステムの使用者に促す表示をモニタ9に表示させる。
使用者による指示領域の選択が確認されたら処理はS715に進み、この指示領域を代表する位置の座標、ここでは指示領域の中心の座標を取得する。
【0126】
S716では照射指示領域の座標からレーザ走査装置7への入力値への変換処理が行われる。この処理は、具体的には、図11(a)のS113からS117にかけての処理、図11(b)のS123からS127にかけての処理、および図11(c)のS131からS138にかけての処理を順に行って、S715の処理によって取得された指示領域の中心の位置の座標に基づいた光軸の位置ずれ及び回転ずれの補正処理並びに光学ひずみの補償処理を行う。
【0127】
S717では、S714の処理によって確認された指示領域についてS716の処理による変換を施してレーザ光の走査を行ったときの走査範囲の四隅の座標を取得する。
S718では、S717の処理によって取得された座標から、ミラー11への制御信号によって走査させようとしているレーザ光の振れ幅aに対する標本1上で本来走査させようとしているレーザ光の走査幅bを求めて比率b/aの計算を行う。
【0128】
S719では、標本1がミラーから観察対象のものへと取り替えられ、S718の処理によって算出された比率だけミラー11の振れ角を拡大させる設定をレーザ走査装置7に対して行う。
S720では、S714の処理によって確認された指示領域についてS716の処理による変換を施した後の位置を中心としてレーザ光を走査する設定をレーザ走査装置7に行う。
【0129】
S721では、標本1がミラーから観察対象のものへと取り替えられ、S720までの処理によってなされたレーザ光の走査の設定の下で所定の実験・観察がこのシステムの使用者によって行われる。
以上までの処理がレーザ光の変調部を有していない実施例1、2、及び4のシステムにおいて予め特定されている指定領域へのレーザ光の走査を行うための処理である。このようにして調整を行うことにより、レーザ光の変調部を有していないシステムであっても、指定の領域をレーザ光で精度よく照射することができるようになる。
【0130】
なお、以上までに説明した処理によって一旦得られた調整のための値をPC8の有する記憶装置に格納しておくようにすれば、このシステムの使用開始時にこれらの調整処理を毎度行うような手間を省くことができる。
【0131】
【発明の効果】
以上詳細に説明したように、本発明は、標本の像が表されている画像を取得する画像取得部を有する画像取得装置と、該標本にレーザ光を照射するレーザ光照射部を有するレーザ光走査装置とを備えている標本観察システムにおいて、レーザ光照射部によって照射されたレーザ光の照射位置を画像取得部で取得された画像から測定し、この測定により得られた照射位置とレーザ光照射部に対して指示されたレーザ光照射の照射指示位置との差異を示す情報に基づいて、レーザ光照射部の照射位置を校正するようにする。
【0132】
こうすることにより、レーザ光の照射位置を測定するための専用の測定手段や特別の工具を用いることなくレーザ光の照射位置の調整をおこなうことができるようなるという効果を奏する。
【図面の簡単な説明】
【図1】本発明を実施する標本観察システムの基本構成を示す図である。
【図2】画像取得装置とレーザ走査装置との光軸のずれを示す図である。
【図3】レーザ光の照射指示位置と取得画像におけるレーザ光の照射位置とのずれの様子を示す図である。
【図4】画像取得装置とレーザ走査装置との光軸の位置ずれの補正の方法を説明する図である。
【図5】画像取得装置とレーザ走査装置との光軸の回転ずれ補正の手法を説明する図である。
【図6】レンズ等で生じる光学ひずみの補償の手法を説明する図である。
【図7】格子状のレーザ光の照射軌跡を示す図である。
【図8】偏向ミラーの制御信号と変更ミラーの位置変化との時間関係を示す図である。
【図9】実施例1の標本観察システムの構成を示す図である。
【図10】レーザスポットが表されている取得画像の例を示す図である。
【図11】実施例1のPCによって行われる制御処理の処理内容を示すフローチャートである。
【図12】実施例2の標本観察システムの構成を示す図である。
【図13】実施例2のPCによって行われる制御処理の処理内容を示すフローチャートである。
【図14】測定位置ひずみの補償処理の処理内容を示すフローチャートである。
【図15】実施例4の標本観察システムの構成を示す図である。
【図16】レーザ光走査の指定領域の位置ずれの様子を示す図である。
【図17】実施例6のPCによって行われる制御処理の処理内容を示すフローチャートである。
【図18】指定領域のレーザ光走査において生じる照射不良を説明する図である。
【図19】実施例7のPCによって行われる制御処理の処理内容を示すフローチャートである。
【符号の説明】
1 標本
2 ステージ
3 対物レンズ
4 顕微鏡装置
51、52 ポート
6 画像取得装置
61 CCD撮像装置
62 レーザ走査型顕微鏡装置
7 レーザ走査装置
8 PC
9 モニタ
10 ハーフミラー
11、110 ミラー
12、120 ガルバノメータ
13、130 レーザ光源
14 レーザ導入光路
140 ダイクロイックミラー
150 検出装置
Claims (9)
- 標本の観察を行うためのシステムにおいて、
前記標本の像が表されている画像を取得する画像取得手段を有する画像取得装置と、
前記標本上の位置の指定に応じ、該位置に向けてレーザ光を照射するレーザ光照射手段を有するレーザ光走査装置と、
前記レーザ光の照射位置と、前記レーザ光照射手段に対して指定された前記位置との差異を検出する検出手段と、
前記レーザ光照射手段に対して指定される前記位置の変換を前記差異に基づいて行い、該変換が施された後の位置を該レーザ光照射手段に対して指定する変換手段と、
を備え、
前記変換手段は、前記レーザ光照射手段に対して指定される前記変換前の前記位置と、該変換が施された後の位置が指定された該レーザ光照射手段によって照射されるレーザ光の照射位置との前記画像上における差異が、前記検出手段によって検出されていた前記差異よりも少なくなるように前記変換を行う、
ことを特徴とする標本観察システム。 - 前記画像取得装置は、撮像装置またはレーザ走査型顕微鏡であることを特徴とする請求項1に記載の標本観察システム。
- 前記変換手段によって行われる変換は、前記レーザ光照射手段に対して指定される前記位置を平行に移動する変換であることを特徴とする請求項1に記載の標本観察システム。
- 前記変換手段によって行われる変換は、前記レーザ光照射手段に対して指定される前記位置の回転変換であることを特徴とする請求項1に記載の標本観察システム。
- 前記変換手段によって行なわれる変換は、前記レーザ光照射手段に対して指定される前記位置の前記画像上における位置と、該画像の中心の位置との間の距離に基づいた変換であることを特徴とする請求項1に記載の標本観察システム。
- 前記レーザ光照射手段は、該レーザ光照射手段によって照射されるレーザ光を前記標本上で走査させる走査手段を更に有し、
前記検出手段は、前記走査手段によって走査された前記レーザ光の前記標本上での走査の軌跡上に位置する所定の点と、該レーザ光が該所定の点を照射したときに前記レーザ光照射手段に対して指定されていた前記位置との前記画像上における差異を検出する、
ことを特徴とする請求項1に記載の標本観察システム。 - 前記レーザ光照射手段は、
該レーザ光照射手段によって照射されるレーザ光を変調する変調手段と、
該レーザ光照射手段によって照射されるレーザ光を前記標本上で走査させる走査手段と、
を更に有し、
前記走査手段は、該走査手段に入力される信号のレベルに対応する位置に前記レーザ光を照射し、該信号のレベルを変化させることで前記走査を行い、
前記検出手段は、前記走査手段に入力されている信号で前記変調手段によって変調された前記レーザ光が該走査手段によって前記標本上を走査するときにおける、該標本上の所定の照射位置が照射される時刻と、前記レーザ光照射手段に対して該所定の照射位置への照射が指定された時刻との時間差を前記差異として検出し、
前記変換手段は、前記走査手段に入力されている信号を、前記検出手段によって検出された前記時間差だけ遅延させて前記レーザ光照射手段に与え、
前記変調手段は、前記変換手段によって遅延された信号で前記レーザ光を変調する、
ことを特徴とする請求項1に記載の標本観察システム。 - 前記レーザ光照射手段は、前記標本上の範囲の指定に応じ、該レーザ光照射手段によって照射されるレーザ光を該範囲に対して走査させる走査手段を更に有し、
前記検出手段は、前記走査手段によって前記レーザ光の走査がされた前記標本上の範囲と、該範囲が走査されたときに前記走査手段に対して指示されていた前記範囲との差異を検出し、
前記変換手段は、前記走査手段に対して指定される前記標本上の範囲を、前記検出手段によって検出された前記差異に基づいて拡大して前記レーザ光照射手段に与え、
前記走査手段は、前記変換手段によって前記レーザ光照射手段に与えられた前記範囲を前記指定の範囲として前記レーザ光を走査させる、
ことを特徴とする請求項1に記載の標本観察システム。 - 標本の像が表されている画像を取得する画像取得部を有する画像取得装置と、該標本上の位置の指定に応じ、該位置に向けてレーザ光を照射するレーザ光照射部を有するレーザ光走査装置とを備えている該標本の観察を行うためのシステムの調整方法であって、
前記レーザ光の照射位置と、前記レーザ光照射部に対して指定された前記位置との差異の検出を行い、
前記差異に基づいて行われる前記レーザ光照射部に対して指定される前記位置の変換であって、該レーザ光照射部に対して指定される該変換前の位置と、該変換が施された後の位置が指定された該レーザ光照射部によって照射されるレーザ光の照射位置との前記画像上における差異が、前記検出によって検出されていた差異よりも少なくなるような該変換を行い、
前記変換が施された後の位置を該レーザ光照射部に対して指定する、
ことを特徴とする標本観察システムの調整方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002272697A JP2004109565A (ja) | 2002-09-19 | 2002-09-19 | 標本観察システム及び標本観察システムの調整方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002272697A JP2004109565A (ja) | 2002-09-19 | 2002-09-19 | 標本観察システム及び標本観察システムの調整方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004109565A true JP2004109565A (ja) | 2004-04-08 |
Family
ID=32269649
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002272697A Withdrawn JP2004109565A (ja) | 2002-09-19 | 2002-09-19 | 標本観察システム及び標本観察システムの調整方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004109565A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006337701A (ja) * | 2005-06-01 | 2006-12-14 | Olympus Corp | 走査型共焦点レーザ顕微鏡 |
| JP2007187945A (ja) * | 2006-01-16 | 2007-07-26 | Yokogawa Electric Corp | 共焦点顕微鏡 |
| JP2009082966A (ja) * | 2007-10-01 | 2009-04-23 | Olympus Corp | 調整装置、レーザ加工装置、調整方法、および調整プログラム |
| JP2012141608A (ja) * | 2010-12-29 | 2012-07-26 | Leica Microsystems Cms Gmbh | 共焦点走査型顕微鏡における画像歪みを補正する方法 |
-
2002
- 2002-09-19 JP JP2002272697A patent/JP2004109565A/ja not_active Withdrawn
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006337701A (ja) * | 2005-06-01 | 2006-12-14 | Olympus Corp | 走査型共焦点レーザ顕微鏡 |
| JP2007187945A (ja) * | 2006-01-16 | 2007-07-26 | Yokogawa Electric Corp | 共焦点顕微鏡 |
| JP2009082966A (ja) * | 2007-10-01 | 2009-04-23 | Olympus Corp | 調整装置、レーザ加工装置、調整方法、および調整プログラム |
| TWI422452B (zh) * | 2007-10-01 | 2014-01-11 | Olympus Corp | Adjustment device, laser processing device, adjustment method and adjustment program |
| JP2012141608A (ja) * | 2010-12-29 | 2012-07-26 | Leica Microsystems Cms Gmbh | 共焦点走査型顕微鏡における画像歪みを補正する方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2194414B1 (en) | Microscope system and method of operation thereof | |
| CN103765290B (zh) | 用于图像扫描的方法和装置 | |
| JP5814709B2 (ja) | タイムラプス観察方法、及び、それに用いられるタイムラプス観察装置 | |
| JP2007183264A (ja) | スキャナの駆動特性の評価装置及びその評価方法 | |
| US20070081233A1 (en) | Scanning laser microscope apparatus and light-amount detection unit | |
| JP6035023B2 (ja) | 共焦点走査型顕微鏡における画像歪みを補正する方法 | |
| CN102449527B (zh) | 图像处理装置、图像处理方法和显微镜 | |
| KR20220118393A (ko) | 높은 프레임 레이트 및 높은 동적 범위 전자 현미경 | |
| US10867771B2 (en) | Electron microscope and specimen tilt angle adjustment method | |
| JP2011530708A (ja) | 多重スポット走査装置におけるレンズ歪みの測定及び補正 | |
| JP2008233883A (ja) | 走査型レーザ顕微鏡 | |
| JP2002098901A (ja) | 走査型レーザ顕微鏡 | |
| JP2002131646A (ja) | 走査型顕微鏡法における位置信号および検出信号の位相補正のための方法ならびに装置および走査型顕微鏡 | |
| JP2003329424A (ja) | 三次元形状計測装置 | |
| JP5798099B2 (ja) | 画質調整方法、プログラムおよび電子顕微鏡 | |
| JP2004109565A (ja) | 標本観察システム及び標本観察システムの調整方法 | |
| JP2017101923A (ja) | 走査プローブ顕微鏡及び、これを用いた試料測定方法 | |
| JPH1152252A (ja) | 蛍光顕微鏡 | |
| JP2023151730A (ja) | レーザ加工システム | |
| WO2010143375A1 (ja) | 顕微鏡装置および制御プログラム | |
| TW201916961A (zh) | 雷射加工機的控制裝置、雷射加工方法及雷射加工機 | |
| JPH11231223A (ja) | 走査型光学顕微鏡 | |
| EP4293701A3 (en) | Charged particle beam device and image acquisition method | |
| JP2005291720A (ja) | 蛍光検出装置、濃淡情報補正方法および濃淡情報補正プログラム | |
| US20170102533A1 (en) | Image correction method and microscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20060110 |