JP2004144577A - 経路提供装置、経路提供方法、ナビゲーション装置、及び、コンピュータプログラム - Google Patents
経路提供装置、経路提供方法、ナビゲーション装置、及び、コンピュータプログラム Download PDFInfo
- Publication number
- JP2004144577A JP2004144577A JP2002308862A JP2002308862A JP2004144577A JP 2004144577 A JP2004144577 A JP 2004144577A JP 2002308862 A JP2002308862 A JP 2002308862A JP 2002308862 A JP2002308862 A JP 2002308862A JP 2004144577 A JP2004144577 A JP 2004144577A
- Authority
- JP
- Japan
- Prior art keywords
- route
- vehicle
- traveling route
- new
- travel route
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 52
- 238000004590 computer program Methods 0.000 title claims description 6
- 238000001514 detection method Methods 0.000 claims abstract description 23
- 230000006870 function Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3415—Dynamic re-routing, e.g. recalculating the route when the user deviates from calculated route or after detecting real-time traffic data or accidents
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
Abstract
【解決手段】位置取得手段61が取得した現在位置情報と予め設定されていた走行予定経路の経路情報とから車両が走行予定経路から逸脱したことを検出する逸脱検出手段62と、車両が走行予定経路から逸脱した際に新たな走行予定経路を決定する走行経路決定手段63とを備え、この走行経路決定手段63は、逸脱検出手段62によって検出された車両の逸脱態様に基いて、複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定する。
【選択図】 図1
Description
【産業上の利用分野】
本発明は、経路提供装置、経路提供方法、ナビゲーション装置、及びコンピュータをこの経路提供装置やナビゲーションシステムとして機能させるためのコンピュータプログラムに関する。
【0002】
【従来の技術】
人の様々な活動を支援する移動体としては自動車等の車両が代表的である。また、これ等の車両に搭載され、運転の支援を行うためのシステムとして、ナビゲーションシステムが開発されている。
【0003】
従来のナビゲーションシステムでは、出発地点と目的地点が設定されると、出発地点から目的地点に向けての走行経路が、当該システムに組み込まれたCPUや地図データベースにより自動的に探索され、当該システムの表示手段上に地図と共に表示される。このように、走行経路が地図と共に表示されることによって、運転者は、不慣れな地域を走行する場合であっても、迷うことなく目的地まで車両を運転することができる。
【0004】
ただし、実際に運転が開始された後、運転者はナビゲーションシステムに設定されていた走行経路の全てに沿って運転を継続するとは限らず、走行経路の途中で、その走行経路から逸脱した道路に進入して走行する場合もある。このような場合に、設定されていた走行経路が変更されずに表示されていても、運転者としては支援がなされているとは感じないこととなる。
【0005】
そこで、車両が走行中に、予め設定されていた走行経路から逸脱し、走行経路に設定されていない道路に進入した場合に、改めて、逸脱した地点付近から目的地点までの走行経路を探索し、当該システムの表示手段上に地図と共に表示するナビゲーションシステムが提案されている。(特許文献1参照)。
【0006】
【特許文献1】特開平09−297032号公報(第5頁、図2)
【0007】
【発明が解決しようとする課題】
従来に比べ、移動体が走行予定経路から逸脱した際に、それまで、もしくはその時の車両の運転状況を加味して、より運転状況に適合した新たな走行予定経路を決定することが可能な経路提供装置を提供することにある。
【0008】
【課題を解決するための手段】
請求項1記載の経路提供装置は、移動体の現在位置情報を取得する位置取得手段と、前記現在位置情報に基き前記移動体が予め設定されていた走行予定経路から逸脱したことを検出する逸脱検出手段と、前記移動体が走行予定経路から逸脱した際に新たな走行予定経路を決定する走行経路決定手段とを備えた経路提供装置において、前記走行経路決定手段は、前記逸脱検出手段の検出結果に基いて、複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定することを特徴としている。
【0009】
請求項3記載のナビゲーションシステムは、請求項1又は2記載の経路提供装置と、移動体の現在位置を測位し現在位置情報として出力する位置測位手段と、走行予定経路を表示する表示装置とを備えたことを特徴としている。
【0010】
請求項4記載の経路提供方法は、移動体の現在位置情報を取得する位置取得工程と、前記現在位置情報に基き前記移動体が予め設定されていた走行予定経路から逸脱したことを検出する逸脱検出工程と、前記移動体が走行予定経路から逸脱した際に新たな走行予定経路を決定する走行経路決定工程とを備えた経路提供方法において、前記走行経路決定工程では、前記逸脱検出工程での検出結果に基いて、複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定することを特徴としている。
【0011】
【発明の実施の形態】
本発明に係る実施の形態について図1を基に説明する。ここに示される形態は、ナビゲーションシステムに経路提供装置を採用したものである。
【0012】
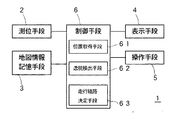
図1において、ナビゲーションシステム10は、車両の現在位置を測位する測位手段2と、道路情報や施設情報が記憶された地図情報記憶手段3と、各種情報を表示する表示手段4と、システムの使用者が各種の操作を施すための操作手段5と、システムを制御し、かつ後述する逸脱検出手段や走行経路決定手段として機能する制御手段6とから構成されている。
【0013】
測位手段2は、GPSアンテナやGPS受信器からなるGPS系測位部と、車速度パルス検出器やジャイロセンサからなる自立系測位部とから構成され、ナビゲーションシステム1が搭載されている移動体(車両)の現在位置を測位し、その測位結果である現在位置情報を出力するものである。
【0014】
地図情報記憶手段3は、CD−ROMディスク、DVD−ROMディスク、または、ハードディスク等のディスク状情報記録メディアから構成され、道路の形状や位置や種別を定義した道路情報と施設の形状や位置や種別を定義した施設情報、さらには、地図を構成する緑地や河川などの形状や位置や種別を定義した各種の情報が記憶された、周知の地図情報記憶手段である。
【0015】
表示手段4は、液晶ディスプレイやCRTディスプレイ等のディスプレイから構成され、地図の表示、車両の現在位置マークの表示、地点情報の検索や施設情報の検索を行うための情報メニューの表示など、様々な情報を表示する。
【0016】
操作手段5は、リモコン装置や表示手段4の表示部前面に設けられたタッチパネルから構成された入力部をから構成され、使用者がナビゲーションシステム1に対して指令を入力するための手段である。
【0017】
制御手段6は、CPUやRAM、ROM等のメモリから構成され、ナビゲーションシステム1の制御を司る手段である。また、ROMに記憶されている制御プログラムに応じて、位置取得手段61や逸脱検出手段62や走行経路決定手段63として機能する。
【0018】
位置取得手段61は、測位手段2が出力している現在位置情報を取得する。また、この現在位置情報は、緯度情報、経度情報、高度情報を含んでいる。
【0019】
逸脱検出手段62は、測位手段21から出力された現在位置情報と走行経路情報とを比較して、予め設定されていた走行経路から、車両が逸脱したか否かを検出する手段である。また、この逸脱検出手段62では、車両がどのようにして走行経路から逸脱したのか、逸脱が何回なされたのか等、車両が逸脱する際の態様を検出することができる。
【0020】
走行経路決定手段63は、出発地点と目的地点を結ぶ経路を探索する手段である。出発地点は、使用者が操作手段5によって特定した地点の地点情報(緯度、経度、高度情報を含む)、または、位置取得手段61が取得した、測位手段2が測位した車両の現在位置を示す現在位置情報(緯度、経度、高度情報を含む)によって特定される地点である。また、目的地点は、使用者が操作手段5によって特定した地点の地点情報(緯度、経度、高度情報を含む)によって特定される地点である。
【0021】
走行経路決定手段63は、これらの各地点情報と、地図記憶手段3に記憶されている道路情報とに基き、出発地点から目的地点に向かう走行予定経路を自動的に探索する。また、この走行経路決定手段63は、走行予定経路を自動的に探索する際に利用される決定条件を多数備えている。
【0022】
車両が走行予定経路から逸脱した場合には、走行経路決定手段63は探索処理を直ちに実行し、新たな走行予定経路を提供する。この場合には、逸脱検出手段62が検出した逸脱態様に応じて、前述の決定条件のうちの、1ないし複数が選択され、その選択された決定条件に基き、走行経路決定手段63は、新たな走行予定経路を自動的に探索する。
【0023】
道路情報にはリンク情報とノード情報が含まれており、これらの情報の形態は周知の技術と同一である。走行経路決定手段63による走行予定経路の探索は、特にリンク情報に含まれるリンクコストが利用される。
【0024】
このリンクコストは道路の種別などに応じて予め付与されている数値的指標であり、リンクコストが高い数値である道路は、走行予定経路として選択されづらくなっている。
【0025】
このようにして、本実施形態に示すナビゲーションシステム1は、測位手段2が出力している車両の現在位置情報を位置取得手段61が取得し、この現在位置情報に基き、予め設定されていた走行予定経路から車両が逸脱したことを逸脱検出手段62が検出すると、走行経路決定手段63が逸脱検出手段62が検出した逸脱態様(車両の走行経路からの逸脱のしかた)に基いて、複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定する。
【0026】
これによれば、車両の運転状況に最も適合した新たな走行予定経路が決定することが可能となり、より一層の運転を支援することができるものである。
【0027】
【実施例】
次に、上述した実施の形態に係る実施例について、図2を用いて詳述する。
当該図2は、予め設定されている走行予定経路から車両が逸脱したことが逸脱検出手段62によって検出された際に、走行経路決定手段63によって実行される新たな走行予定経路を探索して決定する処理を示すフローチャートである。
【0028】
ここで、まず、前述した複数の経路決定条件の類型について説明する。
経路決定条件1:復帰経路探索
「復帰探索」条件で定義される経路決定条件は、車両が予め設定されていた走行予定経路から逸脱した場合に、その逸脱してしまった走行予定経路に復帰させ易くするための新たな走行予定経路が探索されるための条件である。
【0029】
この「復帰経路探索」条件では、予め走行予定経路として設定されていた道路のリンクコストに対して、その数値を下げる処理を行い、これにより、逸脱してしまった走行予定経路が再び新たな走行予定経路として設定され易くするものである。
【0030】
また、この「復帰経路探索」条件では、逸脱してしまった走行予定経路上に位置する途中の地点から、目的地点までは、この逸脱してしまった走行予定経路の情報をそのまま利用し、逸脱している地点からその途中の地点までの走行予定経路が新たに探索され決定される。
【0031】
したがって、新たな走行予定経路として、既に決定されている走行予定経路の途中地点までを探索するための処理を施すのみで、逸脱している地点から目的地点までの全行程について走行予定経路を設定するための探索を改めて行う場合に比べ、処理完了までの時間を短縮することができる。
【0032】
経路決定条件2:全経路探索1,2,3
「全経路探索1」条件、「全経路探索2」条件、「全経路探索3」条件で定義される経路決定条件は、車両が予め設定されていた走行予定経路から逸脱した場合に、その逸脱してしまった地点から目的地点までの走行予定経路が新たに探索されるための条件である。
【0033】
なお、「全経路探索1」条件は、予め走行予定経路として設定されていた道路のリンクコストに対して、その数値を下げる処理を行い、これにより、逸脱してしまった走行予定経路が再び新たな走行予定経路として設定され易くするものである。
【0034】
また、「全経路探索2」条件は、リンクコストの変更処理などは行わず、その時点において最適な新たな走行予定経路を探索し設定するものである。
【0035】
また、「全経路探索3」条件は、予め走行予定経路として設定されていた道路のリンクコストに対して、その数値を上げる処理を行い、これにより、逸脱してしまった走行予定経路が再び新たな走行予定経路として設定されづらくするものであり、いわば、予め走行予定経路に対する迂回経路を探索するものである。
【0036】
次に、逸脱検出手段62が逸脱態様(車両の走行経路からの逸脱のしかた)を検出する処理と、走行経路決定手段63が上記の複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定する処理について、図2を用いて説明する。
【0037】
なお、当該図2のフローチャートによって示された処理は、逸脱検出手段62が、測位手段21から出力された現在位置情報と走行経路情報とを比較して、予め設定されていた走行経路から、車両が逸脱したと判断した場合に実行が開始される処理である。
【0038】
まず、処理が開始すると、測位手段21から出力された現在位置情報と地図情報記憶手段3に記憶されている道路情報とにより、車両が高速道路(又は自動車専用道路)上に位置しているか否かが判断される(ステップS1)。
【0039】
ステップS1での判断の結果、車両が高速道路(又は自動車専用道路)上に位置していると判断された場合には、ステップS13に移行して、車両の走行予定経路からの逸脱態様がBタイプであると定義する。このBタイプとは、車両が走行予定経路として設定されていた高速道路(又は自動車専用道路)から、ジャンクション等を経由して異なる高速道路(又は自動車専用道路)に移ったこと等を想定したものである。
【0040】
また、ステップS13に移行した場合には、第1カウンタによるカウント値(Rcnt)が1増加するとともに、第2カウンタによるカウント値(FRcnt)が1増加する。なお、これらの各カウンタによるカウント値は、当該処理において利用されるものであり、また、車両が走行予定経路に沿って所定距離の間(例えば、3Km。)、走行したことを検出した場合(すなわち、所定距離の間、走行予定経路逸脱しなかった場合)にゼロリセットされる。
【0041】
続いて、ステップS14に移行し、逸脱検出手段62によって定義されたタイプにより、走行経路決定手段63が新しい走行予定経路を自動的に探索する。ここで、Bタイプとして定義された場合の探索について説明する。
【0042】
Bタイプとして定義された場合、走行経路決定手段63は、決定条件のうちの「全経路探索2」条件を選択し、リンクコストの変更処理などは行わず、その時点の現在位置情報と目的地点情報とにより、その時点において最適な新たな走行予定経路を探索して設定する。
【0043】
ステップS1での判断の結果、車両が高速道路(又は自動車専用道路)上に位置していないと判断された場合には、ステップS2に移行して、車両の向き(進行方向)と、案内方向とが比較される。この案内方向とは、走行予定経路に基き設定されている、案内地点(例えば、交差点)の手前から当該地点への進入する方向(進入方向)や、当該地点から先の進むべき方向(脱出方向)である。例えば、この脱出方向を案内方向として利用し、案内地点付近での、車両の向きと案内方向が比較される。
【0044】
ステップS2での比較の結果、車両の向きと案内方向が、およそ等しい(例えば、両方向の角度差が45度以内である。)と判断された場合には、ステップS3に移行して、車両の走行予定経路からの逸脱態様がAMタイプであると定義する。このAMタイプとは、車両が走行予定経路として設定されていた本来走行すべき道路から、誤って近くの道路に進入してしまったこと等を想定したものである。
【0045】
また、ステップS3に移行した場合には、第1カウンタによるカウント値(Rcnt)が1増加する。
【0046】
続いて、ステップS14に移行し、逸脱検出手段62によって定義されたタイプにより、走行経路決定手段63が新しい走行予定経路を自動的に探索する。ここで、AMタイプとして定義された場合の探索について説明する。
【0047】
AMタイプとして定義された場合、走行経路決定手段63は、決定条件のうちの「復帰経路探索」条件を選択される。この場合、予め走行予定経路として設定されていた道路のリンクコストに対して、その数値を下げる処理を行い、これにより、逸脱してしまった走行予定経路が再び新たな走行予定経路として設定され易くした上で、新たな走行予定経路を探索して設定する。これによって、本来走行すべき道路(予め走行予定経路として設定されていた道路)から、誤って近くの道路に進入してしまった場合であっても、その誤った道路から再び本来走行すべき道路(予め走行予定経路として設定されていた道路)に復帰するための経路も併せて探索されるため、新たな走行予定経路に沿った運転を継続することにより、本来走行すべき道路(予め走行予定経路として設定されていた道路)に素早く復帰することができる。
【0048】
ステップS2での比較の結果、車両の向きと案内方向が、等しくない(例えば、両方向の角度差が45度より大きい。)と判断された場合には、ステップS4に移行して、測位手段21から出力された現在位置情報と地図情報記憶手段3に記憶されている道路情報とにより、車両が細街路上に位置しているか否かが判断される。
【0049】
ステップS4での比較の結果、車両が細街路上に位置していると判断された場合には、ステップS5に移行して、車両の走行予定経路からの逸脱態様がAタイプであると定義する。このAタイプとは、車両が走行予定経路として設定されていた本来走行すべき道路から、近くの道路に進入したものの、再び、走行予定経路として設定されていた本来走行すべき道路に復帰するであろうと予測しているものである。
【0050】
この、ステップS5に移行した場合にも、第1カウンタによるカウント値(Rcnt)が1増加する。
【0051】
続いて、ステップS14に移行し、逸脱検出手段62によって定義されたタイプにより、走行経路決定手段63が新しい走行予定経路を自動的に探索する。ここで、Aタイプとして定義された場合の探索について説明する。
【0052】
Aタイプとして定義された場合、走行経路決定手段63は、決定条件のうちの「復帰経路探索」条件を選択される。この場合、予め走行予定経路として設定されていた道路のリンクコストに対して、その数値を下げる処理を行い、これにより、逸脱してしまった走行予定経路が再び新たな走行予定経路として設定され易くした上で、新たな走行予定経路を探索して設定する。これによって、本来走行すべき道路(予め走行予定経路として設定されていた道路)から、誤って近くの道路に進入してしまった場合であっても、その誤った道路から再び本来走行すべき道路(予め走行予定経路として設定されていた道路)に復帰するための経路も併せて探索されるため、新たな走行予定経路に沿った運転を継続することにより、本来走行すべき道路(予め走行予定経路として設定されていた道路)に素早く復帰することができる。
【0053】
ステップS4での比較の結果、車両が細街路上に位置していると判断された場合には、ステップS6に移行して、第1カウンタによるカウント値(Rcnt)が1であるか(Rcnt=1?)を判断する。
【0054】
ステップS6での判断の結果、第1カウンタによるカウント値(Rcnt)が1である場合には、ステップS5に移行して、上述の処理が繰り返される。
【0055】
一方、ステップS6において、第1カウンタによるカウント値(Rcnt)が1でない場合には、ステップS7に移行して、新たな走行予定経路が探索されて設定された後、車両の走行が継続する過程において、その走行内容が上記の新たな走行予定経路における案内に一度でも従ったことがあるか否かが判断される。
【0056】
この、ステップS7における判断では、車両の現在位置情報と新たに探索されていた走行予定経路情報とに基き、その新たに探索されていた走行予定経路に含まれる案内地点(例えば、交差点などの、運転支援情報である案内情報が出力される地点。)を通過したことがあるか否かが判断される。
【0057】
ステップS7での判断の結果、新たな走行予定経路における案内に一度でも従ったことがあると判断された場合には、ステップS8に移行して、第2カウンタによるカウント値(FRcnt)が3の倍数に相当する数値であるかを判断する。
【0058】
ステップS8での判断の結果、第2カウンタによるカウント値(FRcnt)が3の倍数に相当する数値ではないと判断した場合には、ステップS5に移行して、上述の処理が繰り返される。
【0059】
一方、ステップS8での判断の結果、第1カウンタによるカウント値(Rcnt)が3の倍数に相当する数値であると判断した場合には、ステップS9に移行して、車両の走行予定経路からの逸脱態様がA’タイプであると定義する。このA’タイプとは、車両の予め走行予定経路として設定されていた道路から逸脱とその走行予定経路への復帰探索が繰り返されることを防止するためのものである。本実施例の場合には、3回の復帰検索の繰り返し後1回は全経路探索を行うこととしている。なお、この回数は、任意に設定できることは言うまでもない。
【0060】
この、ステップS9に移行した場合にも、第1カウンタによるカウント値(Rcnt)が1増加する。
【0061】
続いて、ステップS14に移行し、逸脱検出手段62によって定義されたタイプにより、走行経路決定手段63が新しい走行予定経路を自動的に探索する。ここで、A’タイプとして定義された場合の探索について説明する。
【0062】
A’タイプとして定義された場合、走行経路決定手段63は、決定条件のうちの「全経路探索1」条件を選択する。この場合、予め走行予定経路として設定されていた道路のリンクコストに対して、その数値を下げる処理を行い、これにより、逸脱してしまった走行予定経路が再び新たな走行予定経路として設定され易くした上で、逸脱している地点から目的地点までについて、改めて全ての道路を対象に新たな走行予定経路を探索して設定する。これによって、予め走行予定経路として設定されていた道路が設定され易くなってはいるものの、それ以上に走行に適した別の新たな走行予定経路が探索された場合には、その走行予定経路が設定される。
【0063】
ステップS7での判断の結果、新たな走行予定経路における案内に一度も従ったことがないと判断された場合には、ステップS10に移行して、特殊走行予定経路設定で第1カウンタによるカウント値(Rcnt)が7未満であるかを判断する。
【0064】
ステップS10での判断の結果、特殊走行予定経路設定で第1カウンタによるカウント値(Rcnt)が7未満であると判断された場合には、ステップS8に移行し、上述した、それ以降の処理が実行される。この特殊予定経路とは、予め設定されていた走行予定経路が、例えば少し遠回りをする走行予定経路など、通常の最短距離走行予定経路などとは異なる、特殊な走行予定経路を意味し、このような特殊予定経路が予め設定されていた場合には、その走行予定経路に復帰させ易くするための処理である(ステップS10がYES)。
【0065】
一方、ステップS10での判断の結果、第1カウンタによるカウント値(Rcnt)が8以上であると判断された場合には、ステップS11に移行し、第2カウンタによるカウント値(FRcnt)が5以上であるかを判断する。
【0066】
ステップS11での判断の結果、第2カウンタによるカウント値(FRcnt)が4未満の場合には、ステップS13に移行し、それ以降は上述した処理が実行され、一方、第2カウンタによるカウント値(FRcnt)が5以上であると判断された場合には、ステップS12に移行して、車両の走行予定経路からの逸脱態様がCタイプであると定義する。このCタイプとは、運転者が走行予定経路として設定されていた道路を走行したくはないという意思のもと、走行予定経路として設定されていた道路から逸脱していること想定したものである。
【0067】
この、ステップS12に移行した場合にも、第1カウンタによるカウント値(Rcnt)と第2カウンタによるカウント値(FRcnt)とが、各々1増加する。
【0068】
続いて、ステップS14に移行し、逸脱検出手段62によって定義されたタイプにより、走行経路決定手段63が新しい走行予定経路を自動的に探索する。ここで、Cタイプとして定義された場合の探索について説明する。
【0069】
Cタイプとして定義された場合、走行経路決定手段63は、決定条件のうちの「全経路探索3」条件を選択する。この場合、予め走行予定経路として設定されていた道路のリンクコストに対して、その数値を上げる処理を行い、これにより、逸脱してしまった走行予定経路が再び新たな走行予定経路として設定されづらくした上で、逸脱している地点から目的地点までについて、改めて全ての道路を対象に新たな走行予定経路を探索して設定する。これによって、予め走行予定経路として設定されていた道路が設定されづらくなり、迂回路として新たな走行予定経路が探索される可能性が高くなる。この時、特に、車両がその時に位置する道路から道なりに続く前方の道路に対応するリンクコストを下げることにより、車両が走行している道路が走行予定経路として探索され設定されるようにされる。
【0070】
以上、詳述したように、本実施例においては、逸脱検出手段62が、測位手段21から出力された現在位置情報と走行経路情報とを比較して、予め設定されていた走行経路から車両が逸脱したと判断した場合に、逸脱のされ方やカウンタによるそれ以前の逸脱回数などを考慮して、その逸脱時点での逸脱態様を判断する。
【0071】
そして、走行経路決定手段63は、この逸脱態様に応じて、走行経路を決定するための複数の決定条件のうちの1を選択し、その決定条件、逸脱している際の現在位置情報、目的地点情報、予め設定されている走行予定経路の経路情報や、リンクコストの数値変更処理などにより新たな走行予定経路を探索して設定するのである。
【0072】
すなわち、本実施例においては、車両の現在位置情報を取得する位置取得手段61と、この現在位置情報に基き車両が予め設定されていた走行予定経路から逸脱したことを検出する逸脱検出手段62と、車両が走行予定経路から逸脱した際に新たな走行予定経路を決定する走行経路決定手段63とを備えた経路提供装置を搭載したナビゲーションシステムであって、走行経路決定手段63は、逸脱検出手段62の検出結果に基いて、複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定することを特徴としている。
【0073】
これにより、従来に比べ、移動体が走行予定経路から逸脱した際に、それまで、もしくはその時の車両の運転状況を加味して、より運転状況に適合した新たな走行予定経路を決定することが可能な経路提供装置を提供され、より一層の運転の支援を可能とするものである。
【0074】
以上説明した実施の形態ならびに実施例の全てについては、コンピュータプログラムを構築し、そのコンピュータプログラムによってコンピュータを同様の機能として実現させることが可能である。
【0075】
また、このプログラムは、装置内に設けられた情報記録媒体に予め記憶しておいても良く、また、インターネットに接続されたサービスプロバイダ内のサーバに保管されているものであっても良い。
【図面の簡単な説明】
【図1】本発明の実施の形態に係わるブロック図である。
【図2】本発明の実施例に係わる処理を示すフローチャート図である。
【符号の説明】
1…ナビゲーションシステム
2…測位手段
3…地図情報記憶手段
4…表示手段
5…操作手段
6…制御手段
61…位置情報取得手段
62…逸脱検出手段
63…走行経路決定手段
Claims (6)
- 移動体の現在位置情報を取得する位置取得手段と、
前記現在位置情報に基き前記移動体が予め設定されていた走行予定経路から逸脱したことを検出する逸脱検出手段と、
前記移動体が走行予定経路から逸脱した際に新たな走行予定経路を決定する走行経路決定手段とを備えた経路提供装置において、
前記走行経路決定手段は、前記逸脱検出手段の検出結果に基いて、複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定することを特徴とする経路提供装置。 - 前記逸脱検出手段は前記移動体の走行予定経路からの逸脱態様を検出し、
前記走行経路決定手段は前記逸脱態様に基いて、複数の経路決定条件のうちの新たな走行予定経路を決定するための条件を決定することを特徴とする請求項1記載の経路提供装置。 - 請求項1又は2記載の経路提供装置と、
移動体の現在位置を測位し現在位置情報として出力する位置測位手段と
走行予定経路を表示する表示装置とを備えたことを特徴とするナビゲーションシステム。 - 移動体の現在位置情報を取得する位置取得工程と、
前記現在位置情報に基き前記移動体が予め設定されていた走行予定経路から逸脱したことを検出する逸脱検出工程と、
前記移動体が走行予定経路から逸脱した際に新たな走行予定経路を決定する走行経路決定工程とを備えた経路提供方法において、
前記走行経路決定工程では、前記逸脱検出工程での検出結果に基いて、複数の経路決定条件のうちのいずれかの条件により新たな走行予定経路を決定することを特徴とする経路提供方法。 - コンピュータを請求項1又は2記載の経路提供装置として機能させることを特徴とするコンピュータプログラム。
- コンピュータを請求項3記載のナビゲーションシステムとして機能させることを特徴とするコンピュータプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002308862A JP2004144577A (ja) | 2002-10-23 | 2002-10-23 | 経路提供装置、経路提供方法、ナビゲーション装置、及び、コンピュータプログラム |
| EP03256603A EP1413855A3 (en) | 2002-10-23 | 2003-10-20 | Route provision apparatus, route provision method, navigation system, and computer program for route provision apparatus or navigation system |
| US10/689,736 US7054744B2 (en) | 2002-10-23 | 2003-10-22 | Route provision apparatus, route provision method, navigation system, and computer program for route provision apparatus or navigation system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002308862A JP2004144577A (ja) | 2002-10-23 | 2002-10-23 | 経路提供装置、経路提供方法、ナビゲーション装置、及び、コンピュータプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004144577A true JP2004144577A (ja) | 2004-05-20 |
Family
ID=32064344
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002308862A Pending JP2004144577A (ja) | 2002-10-23 | 2002-10-23 | 経路提供装置、経路提供方法、ナビゲーション装置、及び、コンピュータプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7054744B2 (ja) |
| EP (1) | EP1413855A3 (ja) |
| JP (1) | JP2004144577A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100678254B1 (ko) | 2004-11-08 | 2007-02-02 | 삼성전자주식회사 | 다중경로를 이용하여 경로를 안내하는 네비게이션 장치 및방법 |
| JP2009080337A (ja) * | 2007-09-26 | 2009-04-16 | Denso Corp | 広告情報配信システム、配信装置、及び、車載装置 |
| CN102147263A (zh) * | 2010-02-04 | 2011-08-10 | 株式会社电装 | 用于规划行程组合的装置及方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4642333B2 (ja) * | 2003-09-18 | 2011-03-02 | クラリオン株式会社 | 車載情報端末、要約地図作成装置、要約地図表示方法 |
| JP2005249589A (ja) * | 2004-03-04 | 2005-09-15 | Xanavi Informatics Corp | ナビゲーション装置、要約地図配信装置、車両案内方法および地図表示装置 |
| JP4580230B2 (ja) * | 2004-12-27 | 2010-11-10 | クラリオン株式会社 | ナビゲーション装置 |
| AU2009231001A1 (en) | 2008-04-01 | 2009-10-08 | Decarta Inc. | Point of interest search along a route |
| US8010285B1 (en) | 2008-09-30 | 2011-08-30 | Denise Jason A | Electronic navigation related technology |
| EP2414778B1 (en) * | 2009-04-01 | 2018-06-06 | Uber Technologies, Inc. | Point of interest search along a route with return |
| US8417448B1 (en) | 2010-04-14 | 2013-04-09 | Jason Adam Denise | Electronic direction technology |
| JP5625004B2 (ja) * | 2012-02-03 | 2014-11-12 | クラリオン株式会社 | ナビゲーションシステムおよび経路探索方法 |
| US9157755B2 (en) | 2013-07-15 | 2015-10-13 | International Business Machines Corporation | Providing navigational support through corrective data |
| US9530314B2 (en) * | 2013-08-08 | 2016-12-27 | Accenture Global Services Limited | Dynamic ETA and STA transportation system |
| KR101518909B1 (ko) * | 2013-08-09 | 2015-05-15 | 현대자동차 주식회사 | 전방영상 및 네비게이션 기반 운행 장치 및 방법 |
| US9599485B2 (en) * | 2014-05-30 | 2017-03-21 | Apple Inc. | Navigation peek ahead and behind |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1058222B1 (en) * | 1992-08-19 | 2005-12-07 | Aisin Aw Co., Ltd. | Navigation system for vehicles |
| US5757289A (en) * | 1994-09-14 | 1998-05-26 | Aisin Aw Co., Ltd. | Vehicular navigation system |
| US5659476A (en) * | 1994-12-22 | 1997-08-19 | Motorola Inc. | Land vehicle navigation apparatus and method for planning a recovery route |
| JP3410271B2 (ja) * | 1995-12-28 | 2003-05-26 | アルパイン株式会社 | ナビゲーション装置 |
| JPH09297032A (ja) | 1996-05-02 | 1997-11-18 | Pioneer Electron Corp | 経路設定方法および装置 |
| KR100288284B1 (ko) * | 1996-09-30 | 2001-05-02 | 모리 하루오 | 차량용 네비게이션장치 |
| US5911775A (en) * | 1996-10-08 | 1999-06-15 | Alpine Electronics, Inc. | Return point route searching for vehicle navigation |
| US6026346A (en) * | 1996-11-27 | 2000-02-15 | Honda Giken Kogyo Kabushiki Kaisha | Navigation system for indicating of optimum route |
| US6038509A (en) * | 1998-01-22 | 2000-03-14 | Etak, Inc. | System for recalculating a path |
| JP2001116572A (ja) * | 1999-10-14 | 2001-04-27 | Yazaki Corp | 車載ナビゲーション装置及び車載ナビゲーション装置における処理プログラムを記録した記録媒体 |
| JP4467709B2 (ja) * | 2000-03-29 | 2010-05-26 | 本田技研工業株式会社 | 移動体用ナビゲーション装置 |
| US6278942B1 (en) * | 2000-03-21 | 2001-08-21 | Navigation Technologies Corp. | Method and system for providing routing guidance |
-
2002
- 2002-10-23 JP JP2002308862A patent/JP2004144577A/ja active Pending
-
2003
- 2003-10-20 EP EP03256603A patent/EP1413855A3/en not_active Withdrawn
- 2003-10-22 US US10/689,736 patent/US7054744B2/en not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100678254B1 (ko) | 2004-11-08 | 2007-02-02 | 삼성전자주식회사 | 다중경로를 이용하여 경로를 안내하는 네비게이션 장치 및방법 |
| JP2009080337A (ja) * | 2007-09-26 | 2009-04-16 | Denso Corp | 広告情報配信システム、配信装置、及び、車載装置 |
| CN102147263A (zh) * | 2010-02-04 | 2011-08-10 | 株式会社电装 | 用于规划行程组合的装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1413855A2 (en) | 2004-04-28 |
| US20040083055A1 (en) | 2004-04-29 |
| EP1413855A3 (en) | 2006-06-07 |
| US7054744B2 (en) | 2006-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5983158A (en) | Navigation system for vehicles | |
| US8676496B2 (en) | Car navigation apparatus | |
| US20090164116A1 (en) | Navigation apparatus and navigation program | |
| US20120191344A1 (en) | Method and apparatus for displaying lane complexity information for navigation system | |
| JP2008026032A (ja) | 車両用ナビゲーション装置 | |
| JP2004144577A (ja) | 経路提供装置、経路提供方法、ナビゲーション装置、及び、コンピュータプログラム | |
| JP3945444B2 (ja) | カーナビゲーション装置 | |
| JP4622676B2 (ja) | 車載ナビゲーション装置 | |
| JP2000146604A (ja) | 車両用ナビゲ―ション・システム及び方法 | |
| JP2008039480A (ja) | 経路探索装置 | |
| JP2004028825A (ja) | カーナビゲーション装置 | |
| JP4305301B2 (ja) | 車両用経路計算装置 | |
| JP2004170233A (ja) | カーナビゲーション装置 | |
| JP2002310696A (ja) | ナビゲーション装置 | |
| JP4412076B2 (ja) | 施設検索装置、施設検索結果報知装置およびプログラム | |
| JP2010122200A (ja) | ナビゲーション装置 | |
| KR20060050695A (ko) | 네비게이션 장치 및 캘린더 정보 데이터 | |
| JP4024638B2 (ja) | 車載用ナビゲーション装置 | |
| JPH07332993A (ja) | ナビゲーション装置 | |
| JP4547616B2 (ja) | ナビゲーション装置 | |
| JP2001165688A (ja) | ナビゲーション装置 | |
| JP3533957B2 (ja) | ナビゲーション装置 | |
| JP2005331442A (ja) | 通信型ナビゲーション装置および推奨経路表示方法 | |
| JP2008045933A (ja) | 車両用道路地図表示装置 | |
| JP2006029811A (ja) | 車載ナビゲーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070619 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070730 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070918 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080129 |