JP2004154302A - 磁気共鳴イメージング装置 - Google Patents
磁気共鳴イメージング装置 Download PDFInfo
- Publication number
- JP2004154302A JP2004154302A JP2002322227A JP2002322227A JP2004154302A JP 2004154302 A JP2004154302 A JP 2004154302A JP 2002322227 A JP2002322227 A JP 2002322227A JP 2002322227 A JP2002322227 A JP 2002322227A JP 2004154302 A JP2004154302 A JP 2004154302A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- time
- fitting
- input
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000002595 magnetic resonance imaging Methods 0.000 title claims abstract description 14
- 238000012545 processing Methods 0.000 claims description 12
- 230000003068 static effect Effects 0.000 claims description 11
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 claims description 5
- 230000000630 rising effect Effects 0.000 abstract description 2
- 230000002123 temporal effect Effects 0.000 abstract description 2
- 238000000034 method Methods 0.000 description 16
- 238000005259 measurement Methods 0.000 description 13
- 238000005481 NMR spectroscopy Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
Images









Landscapes
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
【課題】傾斜磁場の立ち上がりあるいは立ち下がり時に誘起される渦電流に伴う磁場成分を非線形フィッティングする際に、正確なパラメータの値を効率良く求めるための手段を提供する。
【解決手段】時系列的に表示した磁場強度を用いて、上記磁場強度の所望値を入力する手段と、上記所望値より上記磁場強度の時間的変化に関する関係式を作成する手段と、上記関係式を用い、上記傾斜磁場を調整する手段を備える。
【選択図】 図2
【解決手段】時系列的に表示した磁場強度を用いて、上記磁場強度の所望値を入力する手段と、上記所望値より上記磁場強度の時間的変化に関する関係式を作成する手段と、上記関係式を用い、上記傾斜磁場を調整する手段を備える。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
本発明は、核磁気共鳴現象を利用して被検体の任意の位置の断層像を得るための磁気共鳴イメージング装置(以下、MRI装置という)に関し、特に傾斜磁場の立ち上がりあるいは立ち下がり時に誘起される渦電流に伴う磁場の補償を効率良くできるMRI装置に関する。
【0002】
【従来の技術】
MRI装置は、均一な静磁場中に置かれた被検体に高周波磁場を印加することによって、被検体の任意の領域に存在する原子核(通常プロトン)に核磁気共鳴現象を生じさせ、それによって発生する核磁気共鳴信号(エコー信号)からその領域の断層像を得るものである。この際、特定の領域を選択するために、高周波磁場とともに傾斜磁場を印加する。正確な位置情報を得るために、傾斜磁場の印加時間及び強度を正確かつ任意に制御する必要がある。
【0003】
しかし現実には傾斜磁場の発生により、傾斜磁場コイル周辺の様々な構造体に減衰性電流が誘起される。このような減衰性電流は渦電流と呼ばれ、空間的かつ時間的に変化する磁場を発生し、被検体内の核スピンが感じる傾斜磁場を理想状態から逸脱させてしまう。この渦電流により画像が歪み、信号強度の低下、ゴーストの発生などの画質の低下を招く。
渦電流に起因する画質の低下を防ぐために、渦電流によって誘起される空間的かつ時間的に変化する磁場を測定し、補償する方法が、ファントム及び較正パルスシーケンスを用いて較正走査を実行する方法として提案されている(特許文献1)。
【0004】
【特許文献1】
特開平10−272120号公報。
【0005】
この方法では、静磁場不均一や位相エンコード傾斜磁場による影響を排除するために極性を異ならせた2つのテスト傾斜磁場を用い、各テスト傾斜磁場を印加した後に高周波(RF)パルスをファントム内に照射しながら自由誘導減衰信号(FID信号)を取得する。位相エンコードを異ならせながらFID信号の計測を繰り返し、2次元あるいは3次元の2つの計測データを得る。両者の差分を取ることにより、テスト傾斜磁場により発生した渦電流による磁場の影響をあらわす位相差データが得られる。この位相差データの時間導関数を求め、一連の時間点tiにおける渦電流による磁場の空間分布を得る。これを、時間を横軸にして、ある空間地点あるいは成分についてあらわすと、図8のようになる。図8を例えば次式(1)のような指数関数を用い非線形フィッティングして、式(1)における各係数値、すなわち振幅(A0、A1…)及び時定数(τ’g1、τ’g2…)の最適値を算出する。
測定データ(ti) = A0 + A1Exp(−ti/τ’g1) + A2Exp(−ti/τ’g2) + ..... + AmExp(−ti/τ’gm)……(1)
最後に上記算出された各係数値をもとに、傾斜磁場コイル及びシムコイルに印加する補償電流を算出し、傾斜磁場波形を補償する。
【発明が解決しようとする課題】
【0006】
しかしながら上記従来方法において、非線形フィッティングをする際、式(1)の指数関数の項数(A0、A1Exp(−ti/τ’g1)、A2Exp(−ti/τ’g2) ……の数)は計算時間を短くするため、有限としなければならなかった。項数が有限であると、無限である場合に比べて精度の良いフィッティングをすることはできなかった。
また、非線形フィッティングの方法(代表的なものに、Levenberg−Marquardt法がある。)では、フィッティングプログラムを実行する前に、パラメータ初期値を入力する必要がある。しかしフィッティング結果は、このパラメータ初期値に依存して、異なるという性質を持っていた(非特許文献1)。
【0007】
【非特許文献1】
大野 豊、磯田和男 監修「新版 数値計算ハンドブック」オーム社、1990年9月1日、P778−789。
【0008】
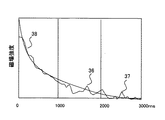
この簡単な例として、パラメータ(時定数τ’g1、τ’g2の2つのみを用いる。)初期値を変えた場合にフィッティング結果がどのように変わるかを次に示す。先ず図9に、渦電流による磁場変化36(図8と同じ)をパラメータ初期値τ’g1、τ’g2を200msと500msとした場合についての、フィッティング結果を示す。この例では緩やかに変化する部分37を優先的にフィッティングしていて、急激に変化する部分38をうまくフィッティングできていない。次に図10に同様のデータを、パラメータτ’g1、τ’g2初期値を30msと500msとした場合についての、フィティング結果を示す。この例では急激に変化する部分38をうまくフィッティングできている。
【0009】
上記例はパラメータの数を2つとした簡単な例であるが、実際にはパラメータの個数は、指数関数の振幅(A0、A1…)及び時定数(τ’g1、τ’g2…)、それぞれ複数個ずつであり、操作者は何度もフィッティングがうまくいくまでパラメータ初期値変えて、やり直さなければならなかった。その際、FID信号計測の際のサンプリング間隔が短いことにより発生するノイズや、FID信号の信号減衰も、正確にフィッティングの妨げとなっていた。
【0010】
本発明の目的は、傾斜磁場の立ち上がりあるいは立ち下がり時に誘起される渦電流に伴う磁場成分を非線形フィッティングする際に、正確なパラメータの値を効率良く求めるための手段を提供することにある。
【0011】
【課題を解決するための手段】
上記目的は、被検体が置かれる空間に静磁場および傾斜磁場をそれぞれ発生する磁場発生手段と、上記被検体の組織を構成する原子の原子核スピンを励起させる高周波磁場を発生する手段と、上記高周波磁場によって被検体から発生するエコー信号を受信する受信手段と、上記エコー信号を用いて上記被検体の画像を再構成する信号処理手段と、上記磁場発生手段、上記高周波磁場を発生する手段、上記受信手段および上記信号処理手段を所定パルスシーケンスに従い制御する制御手段と、上記傾斜磁場の磁場強度を計測する計測手段と、上記磁場強度を時系列的に表示する手段とを備えた磁気共鳴イメージング装置において、上記時系列的に表示した磁場強度を用いて、上記磁場強度の所望値を入力する手段と、上記所望値より上記磁場強度の時間的変化に関する関係式を作成する手段と、上記関係式を用い、上記傾斜磁場を調整する手段を備えたことを特徴とする磁気共鳴イメージング装置によって達成される。
【0012】
【発明の実施の形態】
以下、本発明の実施の形態を説明する。
図1に、本発明が適用されるMRI装置の全体構成のブロック図を示す。このMRI装置は、主たる構成として、被検体9が置かれる空間に均一な静磁場を発生させる静磁場発生回路1と、静磁場に磁場勾配を与える傾斜磁場発生系2と、被検体9の組織を構成する原子の原子核(通常、プロトン)に核磁気共鳴現象を起こさせる高周波磁場を発生する送信系3と、核磁気共鳴現象によって被検体9から発生するエコー信号を受信する受信系4と、受信系4が受信したエコー信号を処理し、上述した原子核の空間密度やスペクトルを表す画像を作成する信号処理系5と、信号処理系5における各種演算や装置全体の制御を行なうための中央処理装置(CPU)7とを備えている。
【0013】
静磁場発生回路1は、永久磁石、常電導方式又は超電導方式の磁石からなり、被検体9の周りにその体軸方向または体軸と直交する方向に均一な静磁場を発生させる。傾斜磁場発生系2は、x、y、zの三軸方向に傾斜磁場を発生するように巻かれた傾斜磁場コイル10と、それぞれの傾斜磁場コイルを駆動する傾斜磁場電源11とからなり、後述のシーケンサ6からの命令に従ってそれぞれのコイルの傾斜磁場電源11を駆動することにより、x、y、zの三軸方向の傾斜磁場Gx、Gy、Gzを被検体9に印加する。この傾斜磁場の加え方により、被検体9の撮像対象領域(スライス、スラブ)を設定することができるとともに、エコー信号に、位相エンコード、周波数エンコードなどの位置情報を付与することができる。
【0014】
さらに図示していないが、静磁場発生回路1及び傾斜磁場発生系2には、静磁場の不均一や、傾斜磁場に起因する渦電流により誘起される磁場を補償するためのシムコイルが配置されている。傾斜磁場コイル10は、一次項の補正を行なうシムコイルとしても機能する。
【0015】
送信系3は、シーケンサ6から送り出される高周波パルスにより被検体9の生体組織を構成する原子の原子核に核磁気共鳴現象を起こさせるために高周波磁場(RFパルス)を照射するもので、高周波発振器12と、変調器13と、高周波増幅器14と、送信側の高周波コイル15とからなる。送信系3では、高周波発振器12から出力された高周波パルスを変調器13で振幅変調し、この振幅変調された高周波パルスを高周波増幅器14で増幅した後に被検体9に近接して配置された高周波コイル15に供給することにより、高周波磁場(電磁波:RFパルス)を被検体9に照射する。
【0016】
受信系4は、被検体9から核磁気共鳴により放出されるエコー信号(NMR信号)を検出するもので、受信側の高周波コイル16と、増幅器17と、直交位相検波器18と、A/D変換器19とからなる。受信系4では、高周波コイル16で検出したエコー信号を増幅器17及び直交位相検波器18を介してA/D変換器19に入力してディジタル信号に変換し、二系列の収集データとして信号処理系5に送る。
【0017】
信号処理系5は、CPU7と、ROM20、RAM21、光磁気ディスク22及び磁気ディスク24等の記録装置と、CRT等のディスプレイ23とからなり、CPU7でフーリエ変換、補正係数計算、像再構成等の処理を行い、得られた画像をディスプレイ23に表示する。ROM20は、経時的な画像解析処理及び計測を行なうプロブラムやその実行において用いられるパラメータなどを記憶する。RAM21は、前計測で得た計測パラメータや受信系4で検出したエコー信号及び関心領域設定に用いる画像等を一時保管するとともにその関心領域を設定するためのパラメータなどを記憶する。光磁気ディスク22及び磁気ディスク24は、CPU7で再構成された画像を記憶するデータ格納部となる。操作部8は、操作者が撮影のためのパルスシーケンスの選択指令やパラメータを入力するとともに、信号処理系5で行なう処理の制御情報を入力するもので、トラックボール25及びキーボード26等から成る。
【0018】
CPU7は、上記演算の他に、被検体9の断層像のデータ収集に必要な種々の命令を、シーケンサ6を介して、傾斜磁場発生系2、送信系3および受信系4に送る。シーケンサ6は、撮像法によって決まる所定の制御のタイムチャートであるパルスシーケンスに則って、傾斜磁場発生系2、送信系3および受信系4を制御し、画像再構成に必要なデータを収集するようにする。
【0019】
次に本発明の第一の実施の形態において、時間的に変化する渦電流による磁場強度([従来の技術]の図8と同様のもの)より、指数関数を用い非線形フィッティングする例を示す。ただし、第一の実施の形態では、図1のディスプレイ23上に図2のようなGraphic User Interface(以下、GUIと呼ぶ。)を表示し、これを用いる。また、第一の実施の形態は後述するマーキングポイントを、時間間隔あるいはデータ点数のどちらかで入力する例である。
【0020】
次に図2を詳細に説明する。図2のGUIは、グラフ27と、マーキングポイント入力部28、マーキングポイントデータボックス29、パラメータ初期値入力ボックス30、フィッティング実行ボタン31とから構成されている。
【0021】
グラフ27は時間的に変化する渦電流による磁場強度を表わしたものであり、横軸に傾斜磁場の立ち上がりあるいは立ち下がりからの時間、縦軸に各時間における渦電流による磁場強度を示す。グラフ27中実線32は磁場強度データ、丸印33は後述するマーキングポイント、縦線34は各マーキングポイントにおける磁場強度測定データを読み取るためのライン、ボックス35は縦線34で読み取った値をデジタル式で表示するものである。例えば、時間1200msにおけるデータは、ボックス35より0.061と読みとることができる。
【0022】
マーキングポイント入力部28は、後述するマーキングポイント33をデータ点数あるいは時間間隔かで、入力するためのものである。左側にデータ点数で入力するか時間間隔で入力するかを選択するためのボタン36、右側に数値入力するための数値入力領域37がある。例えばマーキングポイント入力方法をデータ点数で行うとボタン36で指定し、数値入力部37で11点と入力すると、マーキングポイントが0msから3000msまで11点がグラフ27上にプロットされる。また、マーキングポイント入力方法を時間間隔で行うとボタン36で指定し、数値入力部37で300msと入力すると、マーキングポイントが300ms間隔で3000msまでグラフ27上にプロットされる。
【0023】
マーキングポイントデータボックス29は、グラフ27にプロットしたマーキングポイント33における測定データを、操作者がグラフ27から読み取って入力するためのものである。マーキングポイントデータボックス29は縦に2列の欄より成っていて、左側の時間欄38には各マーキングポイントの時間が表示される。操作者は各マーキングポイントに対応する磁場強度値をグラフ27の縦線ラインを用いボックス35より読み取って、すべて磁場強度欄39に入力する。または、自動的にボックス35内のデータを磁場強度欄39に移行させる。
【0024】
パレメータ初期値入力ボックス30は、後述する式(1)の指数関数にもとずいて、非線形フィッティングする際のパラメータ初期値を操作者が入力するための入力ボックスである。図2では式(1)におけるパラメータ渦電流成分の振幅A0、A1、A2、及び時定数τ’g1、τ’g2について、入力できるようになっている。
【0025】
フィッティング実行ボタン31は、フィッティング実行のためのボタンである。このボタン31をクリックすると、マーキングポイントデータボックス31に入力されたデータをもとに、指数関数フィッティングが行われる。この際式(1)を用いる。
【0026】
次に第1の実施形態において、図2のGUIを用いて指数関数フィッティングする場合の操作手順を図3のフローチャートを用いて説明する。
【0027】
先ず、操作者はマーキングポイントの入力手段としてポイントの点数、又は時間間隔のどちらで入力するかを、ボタン36を用い選択する。ポイントの点数で指定する場合はステップ2へ、ポイントの時間間隔で指定する場合はステップ3へ移動する。(ステップ1)
【0028】
先ポイントを点数で指定する場合は、数値入力部37のデータ点数欄に点数を指定する。するとグラフ27にマーキングポイントが表示される。(ステップ2)
【0029】
先ポイントを時間間隔で指定する場合は、数値入力部37の時間間隔欄に時間間隔を指定する。するとグラフ27にマーキングポイントが表示される。(ステップ3)
【0030】
先マーキングポイントデータボックス29にはマーキングポイントの数だけのデータ入力領域が磁場強度欄38に表示される。操作者は各マーキングポイント上の測定データの値を縦線34を用い読み取り、マーキングポイントデータボックス29の磁場強度欄37に入力していく。この時操作者はマーキングポイントの位置(横軸の時間)上のデータ(磁場強度値)がノイズ等を多く含むデータであり誤差を多く含む場合、任意に少しだけ位置(時間)をずらせて、時間と磁場強度値を再入力することができる。(ステップ4)
【0031】
先非線形フィッティングする際のパラメータ初期値をパラメータ初期値入力ボックス30に操作者が入力する。(本実施形態では、例としてパラメータ渦電流成分の振幅A0、A1、A2の初期値を傾斜磁場の強度の対してそれぞれ2%、時定数τ’g1、τ’g2の初期値を50ms、200msとする。)(ステップ5)
【0032】
先フィッティング実行ボタン313をクリックすることで、パラメータ初期値入力ボックス30に入力された初期値とマーキングポイントデータボックス29に入力されたデータをもとに指数関数フィッティングを行う。(ステップ6)
【0033】
先フィッティング結果を測定データのグラフ上に重ねて表示すると、図4のようになる。(結果フィッティングされた指数関数の係数、渦電流成分の振幅A0、A1、A2は0.2%、1.5%、1.0%、時定数τ’g1、τ’g2は45msと180msとなった。(ステップ7)
【0034】
先フィッティング結果が調整基準に満たすかを判定する。一度目の結果で調整基準を満たさない場合には、フィッティングがOKになるまで(ステップ1)〜(ステップ7)手順を繰り返す。(ステップ8)
【0035】
上記実施の形態によれば、すべての測定データを用いた場合にはうまくできなかった指数関数フィティングを、操作者が選択したいくつかのマーキングポイントを用い行ったので、ノイズ等の影響を抑制することができ、非線形フィッティングする際に、正確なパラメータ値を効率良く求めるための手段を提供することができた。
【0036】
次に本発明の第二の実施の形態において、時間的に変化する渦電流による磁場強度(上記[従来の技術]の図8と同様のもの)より、指数関数を用い非線形フィッティングする例を示す。ただし、第二の実施の形態では、図1のディスプレイ23上に図5のようなGraphic User Interface(以下、GUIと呼ぶ。)を表示し、これを用いる。また、第二の実施の形態は、マーキングポイントを、マウス等を使って直接グラフ27上に入力する例である。
【0037】
次に図5を詳細に説明する。図5のGUIは、グラフ27と、マーキングポイントデータボックス29、パラメータ初期値入力ボックス30、フィッティング実行ボタン31とから構成されている。
【0038】
グラフ27は時間的に変化する渦電流による磁場強度を表わしたものであり、横軸は傾斜磁場の立ち上がりあるいは立ち下がりからの時間、縦軸に各時間における渦電流による磁場強度を示す。グラフ27中実線32は測定データ、丸印33は後述するマーキングポイント、縦線34は各マーキングポイントにおける磁場強度測定データを読み取るためのライン、ボックス35は縦線34で読み取った値をデジタル式で表示するものである。例えば、時間1200msにおけるデータは、ボックス35より0.061と読みとれることができる。
操作者は任意の位置のマーキングポイント33をマウスを用い直接グラフ27上にクリックすることにより、入力することができる。11点入力した結果を、グラフ27に示す。
【0039】
マーキングポイントデータボックス29には、グラフ27上に入力されたマーキングポイントの座標データ(横軸:傾斜磁場の立ち上がりあるいは立ち下がりからの時間、縦軸は各時間における渦電流による磁場強度)が自動的に入力される。
【0040】
パレメータ初期値入力ボックス30は、後述する式(1)の指数関数にもとずいて、非線形フィッティングする際のパラメータ初期値を操作者が入力するための入力ボックスである。図5では式(1)におけるパラメータ渦電流成分の振幅A0、A1、A2、及び時定数τ’g1、τ’g2について、入力できるようになっている。
【0041】
フィッティング実行ボタン31は、フィッティング実行のためのボタンである。このボタン31をクリックすると、マーキングポイントデータボックス30に入力されたデータをもとに、指数関数フィッティングが行われる。この際式(1)を用いる。
【0042】
次に第二の実施形態において、図5のGUIを用いて指数関数フィッティングする場合の操作手順を図6のフローチャートを用いて説明する。
【0043】
操作者は指数関数フィッティングするためのマーキングポイントを直接直接グラフ27上にクリックすることにより、入力する。同時にマーキングポイントデータボックス29にはグラフ27上に入力されたマーキングポイントの座標データが自動的に入力される。(ステップ9)
【0044】
非線形フィッティングする際のパラメータ初期値をパラメータ初期値入力ボックス30に操作者が入力する。(この例では、渦電流成分の振幅A0、A1、A2の初期値を傾斜磁場の強度の対してそれぞれ2%、渦電流成分の時定数τ’g1、τ’g2の初期値をそれぞれ50msと200msとする。)(ステップ10)
【0045】
フィッティング実行ボタン31をクリックすることで、パラメータ初期値入力ボックス30に入力された初期値とマーキングポイントデータボックス29に入力されたデータをもとに指数関数フィッティングを行う。(ステップ11)
【0046】
フィッティング結果を測定データのグラフ上に重ねて表示すると、図4のようになる。(結果フィッティングされた指数関数の係数、渦電流成分の振幅A0、A1、A2は0.2%、1.5%、1.0%、時定数τ’g1、τ’g2は45msと180msとなった。(ステップ12)
【0047】
フィッティング結果が調整基準に満たすかを判定する。一度目の結果で調整基準を満たさない場合には、フィッティングがOKになるまで(ステップ9)〜(ステップ12)の手順を繰り返す。(ステップ13)
【0048】
上記実施の形態によれば、すべての測定データを用いた場合にはうまくできなかった指数関数フィティングを、操作者が選択したいくつかのマーキングポイントを用い行ったので、ノイズ等の影響を抑制することができ、非線形フィッティングする際に、正確なパラメータの値を効率良く求めるための手段を提供することができた。
【0049】
本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種種に変形して実施できるものである。例えば、上記実施形態ではフィッティングに用いる関数として指数関数を適用したが、他の非線形な関数を用いることもできる。
【0050】
【発明の効果】
以上説明した如く、本発明による磁気共鳴イメージング装置によれば、傾斜磁場の立ち上がりあるいは立ち下がり時に誘起される渦電流に伴う磁場の補償を効率良くできる。
【図面の簡単な説明】
【図1】本発明が適用されるMRI装置の全体構成を示すブロック図。
【図2】本発明の第一の実施の形態において、操作者がマーキングをしたGUI。
【図3】本発明の第一の実施の形態において、指数関数フィティングをする場合の操作手順。
【図4】本発明の第一の実施の形態において、操作者がマーキングした点に対して指数関数フィティングを行った結果のGUI。
【図5】本発明の第二の実施の形態において、操作者がマーキングしたGUI。
【図6】本発明の第二の実施の形態において、指数関数フィティングをする場合の操作手順。
【図7】本発明の第二の実施の形態において、操作者がマーキングした点に対して指数関数フィティングを行った結果のGUI。
【図8】渦電流によって誘起された磁場の測定データを時間を横軸にして表わしたもの。
【図9】パラメータ初期値τ’g1、τ’g2を200msと500msとした場合についての、フィッティング結果。
【図10】パラメータ初期値τ’g1、τ’g2を30msと500msとした場合についての、フィッティング結果。
【符号の説明】
31 フィッテング実行ボタン
33 マーキングポイント
【発明の属する技術分野】
本発明は、核磁気共鳴現象を利用して被検体の任意の位置の断層像を得るための磁気共鳴イメージング装置(以下、MRI装置という)に関し、特に傾斜磁場の立ち上がりあるいは立ち下がり時に誘起される渦電流に伴う磁場の補償を効率良くできるMRI装置に関する。
【0002】
【従来の技術】
MRI装置は、均一な静磁場中に置かれた被検体に高周波磁場を印加することによって、被検体の任意の領域に存在する原子核(通常プロトン)に核磁気共鳴現象を生じさせ、それによって発生する核磁気共鳴信号(エコー信号)からその領域の断層像を得るものである。この際、特定の領域を選択するために、高周波磁場とともに傾斜磁場を印加する。正確な位置情報を得るために、傾斜磁場の印加時間及び強度を正確かつ任意に制御する必要がある。
【0003】
しかし現実には傾斜磁場の発生により、傾斜磁場コイル周辺の様々な構造体に減衰性電流が誘起される。このような減衰性電流は渦電流と呼ばれ、空間的かつ時間的に変化する磁場を発生し、被検体内の核スピンが感じる傾斜磁場を理想状態から逸脱させてしまう。この渦電流により画像が歪み、信号強度の低下、ゴーストの発生などの画質の低下を招く。
渦電流に起因する画質の低下を防ぐために、渦電流によって誘起される空間的かつ時間的に変化する磁場を測定し、補償する方法が、ファントム及び較正パルスシーケンスを用いて較正走査を実行する方法として提案されている(特許文献1)。
【0004】
【特許文献1】
特開平10−272120号公報。
【0005】
この方法では、静磁場不均一や位相エンコード傾斜磁場による影響を排除するために極性を異ならせた2つのテスト傾斜磁場を用い、各テスト傾斜磁場を印加した後に高周波(RF)パルスをファントム内に照射しながら自由誘導減衰信号(FID信号)を取得する。位相エンコードを異ならせながらFID信号の計測を繰り返し、2次元あるいは3次元の2つの計測データを得る。両者の差分を取ることにより、テスト傾斜磁場により発生した渦電流による磁場の影響をあらわす位相差データが得られる。この位相差データの時間導関数を求め、一連の時間点tiにおける渦電流による磁場の空間分布を得る。これを、時間を横軸にして、ある空間地点あるいは成分についてあらわすと、図8のようになる。図8を例えば次式(1)のような指数関数を用い非線形フィッティングして、式(1)における各係数値、すなわち振幅(A0、A1…)及び時定数(τ’g1、τ’g2…)の最適値を算出する。
測定データ(ti) = A0 + A1Exp(−ti/τ’g1) + A2Exp(−ti/τ’g2) + ..... + AmExp(−ti/τ’gm)……(1)
最後に上記算出された各係数値をもとに、傾斜磁場コイル及びシムコイルに印加する補償電流を算出し、傾斜磁場波形を補償する。
【発明が解決しようとする課題】
【0006】
しかしながら上記従来方法において、非線形フィッティングをする際、式(1)の指数関数の項数(A0、A1Exp(−ti/τ’g1)、A2Exp(−ti/τ’g2) ……の数)は計算時間を短くするため、有限としなければならなかった。項数が有限であると、無限である場合に比べて精度の良いフィッティングをすることはできなかった。
また、非線形フィッティングの方法(代表的なものに、Levenberg−Marquardt法がある。)では、フィッティングプログラムを実行する前に、パラメータ初期値を入力する必要がある。しかしフィッティング結果は、このパラメータ初期値に依存して、異なるという性質を持っていた(非特許文献1)。
【0007】
【非特許文献1】
大野 豊、磯田和男 監修「新版 数値計算ハンドブック」オーム社、1990年9月1日、P778−789。
【0008】
この簡単な例として、パラメータ(時定数τ’g1、τ’g2の2つのみを用いる。)初期値を変えた場合にフィッティング結果がどのように変わるかを次に示す。先ず図9に、渦電流による磁場変化36(図8と同じ)をパラメータ初期値τ’g1、τ’g2を200msと500msとした場合についての、フィッティング結果を示す。この例では緩やかに変化する部分37を優先的にフィッティングしていて、急激に変化する部分38をうまくフィッティングできていない。次に図10に同様のデータを、パラメータτ’g1、τ’g2初期値を30msと500msとした場合についての、フィティング結果を示す。この例では急激に変化する部分38をうまくフィッティングできている。
【0009】
上記例はパラメータの数を2つとした簡単な例であるが、実際にはパラメータの個数は、指数関数の振幅(A0、A1…)及び時定数(τ’g1、τ’g2…)、それぞれ複数個ずつであり、操作者は何度もフィッティングがうまくいくまでパラメータ初期値変えて、やり直さなければならなかった。その際、FID信号計測の際のサンプリング間隔が短いことにより発生するノイズや、FID信号の信号減衰も、正確にフィッティングの妨げとなっていた。
【0010】
本発明の目的は、傾斜磁場の立ち上がりあるいは立ち下がり時に誘起される渦電流に伴う磁場成分を非線形フィッティングする際に、正確なパラメータの値を効率良く求めるための手段を提供することにある。
【0011】
【課題を解決するための手段】
上記目的は、被検体が置かれる空間に静磁場および傾斜磁場をそれぞれ発生する磁場発生手段と、上記被検体の組織を構成する原子の原子核スピンを励起させる高周波磁場を発生する手段と、上記高周波磁場によって被検体から発生するエコー信号を受信する受信手段と、上記エコー信号を用いて上記被検体の画像を再構成する信号処理手段と、上記磁場発生手段、上記高周波磁場を発生する手段、上記受信手段および上記信号処理手段を所定パルスシーケンスに従い制御する制御手段と、上記傾斜磁場の磁場強度を計測する計測手段と、上記磁場強度を時系列的に表示する手段とを備えた磁気共鳴イメージング装置において、上記時系列的に表示した磁場強度を用いて、上記磁場強度の所望値を入力する手段と、上記所望値より上記磁場強度の時間的変化に関する関係式を作成する手段と、上記関係式を用い、上記傾斜磁場を調整する手段を備えたことを特徴とする磁気共鳴イメージング装置によって達成される。
【0012】
【発明の実施の形態】
以下、本発明の実施の形態を説明する。
図1に、本発明が適用されるMRI装置の全体構成のブロック図を示す。このMRI装置は、主たる構成として、被検体9が置かれる空間に均一な静磁場を発生させる静磁場発生回路1と、静磁場に磁場勾配を与える傾斜磁場発生系2と、被検体9の組織を構成する原子の原子核(通常、プロトン)に核磁気共鳴現象を起こさせる高周波磁場を発生する送信系3と、核磁気共鳴現象によって被検体9から発生するエコー信号を受信する受信系4と、受信系4が受信したエコー信号を処理し、上述した原子核の空間密度やスペクトルを表す画像を作成する信号処理系5と、信号処理系5における各種演算や装置全体の制御を行なうための中央処理装置(CPU)7とを備えている。
【0013】
静磁場発生回路1は、永久磁石、常電導方式又は超電導方式の磁石からなり、被検体9の周りにその体軸方向または体軸と直交する方向に均一な静磁場を発生させる。傾斜磁場発生系2は、x、y、zの三軸方向に傾斜磁場を発生するように巻かれた傾斜磁場コイル10と、それぞれの傾斜磁場コイルを駆動する傾斜磁場電源11とからなり、後述のシーケンサ6からの命令に従ってそれぞれのコイルの傾斜磁場電源11を駆動することにより、x、y、zの三軸方向の傾斜磁場Gx、Gy、Gzを被検体9に印加する。この傾斜磁場の加え方により、被検体9の撮像対象領域(スライス、スラブ)を設定することができるとともに、エコー信号に、位相エンコード、周波数エンコードなどの位置情報を付与することができる。
【0014】
さらに図示していないが、静磁場発生回路1及び傾斜磁場発生系2には、静磁場の不均一や、傾斜磁場に起因する渦電流により誘起される磁場を補償するためのシムコイルが配置されている。傾斜磁場コイル10は、一次項の補正を行なうシムコイルとしても機能する。
【0015】
送信系3は、シーケンサ6から送り出される高周波パルスにより被検体9の生体組織を構成する原子の原子核に核磁気共鳴現象を起こさせるために高周波磁場(RFパルス)を照射するもので、高周波発振器12と、変調器13と、高周波増幅器14と、送信側の高周波コイル15とからなる。送信系3では、高周波発振器12から出力された高周波パルスを変調器13で振幅変調し、この振幅変調された高周波パルスを高周波増幅器14で増幅した後に被検体9に近接して配置された高周波コイル15に供給することにより、高周波磁場(電磁波:RFパルス)を被検体9に照射する。
【0016】
受信系4は、被検体9から核磁気共鳴により放出されるエコー信号(NMR信号)を検出するもので、受信側の高周波コイル16と、増幅器17と、直交位相検波器18と、A/D変換器19とからなる。受信系4では、高周波コイル16で検出したエコー信号を増幅器17及び直交位相検波器18を介してA/D変換器19に入力してディジタル信号に変換し、二系列の収集データとして信号処理系5に送る。
【0017】
信号処理系5は、CPU7と、ROM20、RAM21、光磁気ディスク22及び磁気ディスク24等の記録装置と、CRT等のディスプレイ23とからなり、CPU7でフーリエ変換、補正係数計算、像再構成等の処理を行い、得られた画像をディスプレイ23に表示する。ROM20は、経時的な画像解析処理及び計測を行なうプロブラムやその実行において用いられるパラメータなどを記憶する。RAM21は、前計測で得た計測パラメータや受信系4で検出したエコー信号及び関心領域設定に用いる画像等を一時保管するとともにその関心領域を設定するためのパラメータなどを記憶する。光磁気ディスク22及び磁気ディスク24は、CPU7で再構成された画像を記憶するデータ格納部となる。操作部8は、操作者が撮影のためのパルスシーケンスの選択指令やパラメータを入力するとともに、信号処理系5で行なう処理の制御情報を入力するもので、トラックボール25及びキーボード26等から成る。
【0018】
CPU7は、上記演算の他に、被検体9の断層像のデータ収集に必要な種々の命令を、シーケンサ6を介して、傾斜磁場発生系2、送信系3および受信系4に送る。シーケンサ6は、撮像法によって決まる所定の制御のタイムチャートであるパルスシーケンスに則って、傾斜磁場発生系2、送信系3および受信系4を制御し、画像再構成に必要なデータを収集するようにする。
【0019】
次に本発明の第一の実施の形態において、時間的に変化する渦電流による磁場強度([従来の技術]の図8と同様のもの)より、指数関数を用い非線形フィッティングする例を示す。ただし、第一の実施の形態では、図1のディスプレイ23上に図2のようなGraphic User Interface(以下、GUIと呼ぶ。)を表示し、これを用いる。また、第一の実施の形態は後述するマーキングポイントを、時間間隔あるいはデータ点数のどちらかで入力する例である。
【0020】
次に図2を詳細に説明する。図2のGUIは、グラフ27と、マーキングポイント入力部28、マーキングポイントデータボックス29、パラメータ初期値入力ボックス30、フィッティング実行ボタン31とから構成されている。
【0021】
グラフ27は時間的に変化する渦電流による磁場強度を表わしたものであり、横軸に傾斜磁場の立ち上がりあるいは立ち下がりからの時間、縦軸に各時間における渦電流による磁場強度を示す。グラフ27中実線32は磁場強度データ、丸印33は後述するマーキングポイント、縦線34は各マーキングポイントにおける磁場強度測定データを読み取るためのライン、ボックス35は縦線34で読み取った値をデジタル式で表示するものである。例えば、時間1200msにおけるデータは、ボックス35より0.061と読みとることができる。
【0022】
マーキングポイント入力部28は、後述するマーキングポイント33をデータ点数あるいは時間間隔かで、入力するためのものである。左側にデータ点数で入力するか時間間隔で入力するかを選択するためのボタン36、右側に数値入力するための数値入力領域37がある。例えばマーキングポイント入力方法をデータ点数で行うとボタン36で指定し、数値入力部37で11点と入力すると、マーキングポイントが0msから3000msまで11点がグラフ27上にプロットされる。また、マーキングポイント入力方法を時間間隔で行うとボタン36で指定し、数値入力部37で300msと入力すると、マーキングポイントが300ms間隔で3000msまでグラフ27上にプロットされる。
【0023】
マーキングポイントデータボックス29は、グラフ27にプロットしたマーキングポイント33における測定データを、操作者がグラフ27から読み取って入力するためのものである。マーキングポイントデータボックス29は縦に2列の欄より成っていて、左側の時間欄38には各マーキングポイントの時間が表示される。操作者は各マーキングポイントに対応する磁場強度値をグラフ27の縦線ラインを用いボックス35より読み取って、すべて磁場強度欄39に入力する。または、自動的にボックス35内のデータを磁場強度欄39に移行させる。
【0024】
パレメータ初期値入力ボックス30は、後述する式(1)の指数関数にもとずいて、非線形フィッティングする際のパラメータ初期値を操作者が入力するための入力ボックスである。図2では式(1)におけるパラメータ渦電流成分の振幅A0、A1、A2、及び時定数τ’g1、τ’g2について、入力できるようになっている。
【0025】
フィッティング実行ボタン31は、フィッティング実行のためのボタンである。このボタン31をクリックすると、マーキングポイントデータボックス31に入力されたデータをもとに、指数関数フィッティングが行われる。この際式(1)を用いる。
【0026】
次に第1の実施形態において、図2のGUIを用いて指数関数フィッティングする場合の操作手順を図3のフローチャートを用いて説明する。
【0027】
先ず、操作者はマーキングポイントの入力手段としてポイントの点数、又は時間間隔のどちらで入力するかを、ボタン36を用い選択する。ポイントの点数で指定する場合はステップ2へ、ポイントの時間間隔で指定する場合はステップ3へ移動する。(ステップ1)
【0028】
先ポイントを点数で指定する場合は、数値入力部37のデータ点数欄に点数を指定する。するとグラフ27にマーキングポイントが表示される。(ステップ2)
【0029】
先ポイントを時間間隔で指定する場合は、数値入力部37の時間間隔欄に時間間隔を指定する。するとグラフ27にマーキングポイントが表示される。(ステップ3)
【0030】
先マーキングポイントデータボックス29にはマーキングポイントの数だけのデータ入力領域が磁場強度欄38に表示される。操作者は各マーキングポイント上の測定データの値を縦線34を用い読み取り、マーキングポイントデータボックス29の磁場強度欄37に入力していく。この時操作者はマーキングポイントの位置(横軸の時間)上のデータ(磁場強度値)がノイズ等を多く含むデータであり誤差を多く含む場合、任意に少しだけ位置(時間)をずらせて、時間と磁場強度値を再入力することができる。(ステップ4)
【0031】
先非線形フィッティングする際のパラメータ初期値をパラメータ初期値入力ボックス30に操作者が入力する。(本実施形態では、例としてパラメータ渦電流成分の振幅A0、A1、A2の初期値を傾斜磁場の強度の対してそれぞれ2%、時定数τ’g1、τ’g2の初期値を50ms、200msとする。)(ステップ5)
【0032】
先フィッティング実行ボタン313をクリックすることで、パラメータ初期値入力ボックス30に入力された初期値とマーキングポイントデータボックス29に入力されたデータをもとに指数関数フィッティングを行う。(ステップ6)
【0033】
先フィッティング結果を測定データのグラフ上に重ねて表示すると、図4のようになる。(結果フィッティングされた指数関数の係数、渦電流成分の振幅A0、A1、A2は0.2%、1.5%、1.0%、時定数τ’g1、τ’g2は45msと180msとなった。(ステップ7)
【0034】
先フィッティング結果が調整基準に満たすかを判定する。一度目の結果で調整基準を満たさない場合には、フィッティングがOKになるまで(ステップ1)〜(ステップ7)手順を繰り返す。(ステップ8)
【0035】
上記実施の形態によれば、すべての測定データを用いた場合にはうまくできなかった指数関数フィティングを、操作者が選択したいくつかのマーキングポイントを用い行ったので、ノイズ等の影響を抑制することができ、非線形フィッティングする際に、正確なパラメータ値を効率良く求めるための手段を提供することができた。
【0036】
次に本発明の第二の実施の形態において、時間的に変化する渦電流による磁場強度(上記[従来の技術]の図8と同様のもの)より、指数関数を用い非線形フィッティングする例を示す。ただし、第二の実施の形態では、図1のディスプレイ23上に図5のようなGraphic User Interface(以下、GUIと呼ぶ。)を表示し、これを用いる。また、第二の実施の形態は、マーキングポイントを、マウス等を使って直接グラフ27上に入力する例である。
【0037】
次に図5を詳細に説明する。図5のGUIは、グラフ27と、マーキングポイントデータボックス29、パラメータ初期値入力ボックス30、フィッティング実行ボタン31とから構成されている。
【0038】
グラフ27は時間的に変化する渦電流による磁場強度を表わしたものであり、横軸は傾斜磁場の立ち上がりあるいは立ち下がりからの時間、縦軸に各時間における渦電流による磁場強度を示す。グラフ27中実線32は測定データ、丸印33は後述するマーキングポイント、縦線34は各マーキングポイントにおける磁場強度測定データを読み取るためのライン、ボックス35は縦線34で読み取った値をデジタル式で表示するものである。例えば、時間1200msにおけるデータは、ボックス35より0.061と読みとれることができる。
操作者は任意の位置のマーキングポイント33をマウスを用い直接グラフ27上にクリックすることにより、入力することができる。11点入力した結果を、グラフ27に示す。
【0039】
マーキングポイントデータボックス29には、グラフ27上に入力されたマーキングポイントの座標データ(横軸:傾斜磁場の立ち上がりあるいは立ち下がりからの時間、縦軸は各時間における渦電流による磁場強度)が自動的に入力される。
【0040】
パレメータ初期値入力ボックス30は、後述する式(1)の指数関数にもとずいて、非線形フィッティングする際のパラメータ初期値を操作者が入力するための入力ボックスである。図5では式(1)におけるパラメータ渦電流成分の振幅A0、A1、A2、及び時定数τ’g1、τ’g2について、入力できるようになっている。
【0041】
フィッティング実行ボタン31は、フィッティング実行のためのボタンである。このボタン31をクリックすると、マーキングポイントデータボックス30に入力されたデータをもとに、指数関数フィッティングが行われる。この際式(1)を用いる。
【0042】
次に第二の実施形態において、図5のGUIを用いて指数関数フィッティングする場合の操作手順を図6のフローチャートを用いて説明する。
【0043】
操作者は指数関数フィッティングするためのマーキングポイントを直接直接グラフ27上にクリックすることにより、入力する。同時にマーキングポイントデータボックス29にはグラフ27上に入力されたマーキングポイントの座標データが自動的に入力される。(ステップ9)
【0044】
非線形フィッティングする際のパラメータ初期値をパラメータ初期値入力ボックス30に操作者が入力する。(この例では、渦電流成分の振幅A0、A1、A2の初期値を傾斜磁場の強度の対してそれぞれ2%、渦電流成分の時定数τ’g1、τ’g2の初期値をそれぞれ50msと200msとする。)(ステップ10)
【0045】
フィッティング実行ボタン31をクリックすることで、パラメータ初期値入力ボックス30に入力された初期値とマーキングポイントデータボックス29に入力されたデータをもとに指数関数フィッティングを行う。(ステップ11)
【0046】
フィッティング結果を測定データのグラフ上に重ねて表示すると、図4のようになる。(結果フィッティングされた指数関数の係数、渦電流成分の振幅A0、A1、A2は0.2%、1.5%、1.0%、時定数τ’g1、τ’g2は45msと180msとなった。(ステップ12)
【0047】
フィッティング結果が調整基準に満たすかを判定する。一度目の結果で調整基準を満たさない場合には、フィッティングがOKになるまで(ステップ9)〜(ステップ12)の手順を繰り返す。(ステップ13)
【0048】
上記実施の形態によれば、すべての測定データを用いた場合にはうまくできなかった指数関数フィティングを、操作者が選択したいくつかのマーキングポイントを用い行ったので、ノイズ等の影響を抑制することができ、非線形フィッティングする際に、正確なパラメータの値を効率良く求めるための手段を提供することができた。
【0049】
本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種種に変形して実施できるものである。例えば、上記実施形態ではフィッティングに用いる関数として指数関数を適用したが、他の非線形な関数を用いることもできる。
【0050】
【発明の効果】
以上説明した如く、本発明による磁気共鳴イメージング装置によれば、傾斜磁場の立ち上がりあるいは立ち下がり時に誘起される渦電流に伴う磁場の補償を効率良くできる。
【図面の簡単な説明】
【図1】本発明が適用されるMRI装置の全体構成を示すブロック図。
【図2】本発明の第一の実施の形態において、操作者がマーキングをしたGUI。
【図3】本発明の第一の実施の形態において、指数関数フィティングをする場合の操作手順。
【図4】本発明の第一の実施の形態において、操作者がマーキングした点に対して指数関数フィティングを行った結果のGUI。
【図5】本発明の第二の実施の形態において、操作者がマーキングしたGUI。
【図6】本発明の第二の実施の形態において、指数関数フィティングをする場合の操作手順。
【図7】本発明の第二の実施の形態において、操作者がマーキングした点に対して指数関数フィティングを行った結果のGUI。
【図8】渦電流によって誘起された磁場の測定データを時間を横軸にして表わしたもの。
【図9】パラメータ初期値τ’g1、τ’g2を200msと500msとした場合についての、フィッティング結果。
【図10】パラメータ初期値τ’g1、τ’g2を30msと500msとした場合についての、フィッティング結果。
【符号の説明】
31 フィッテング実行ボタン
33 マーキングポイント
Claims (1)
- 被検体が置かれる空間に静磁場および傾斜磁場をそれぞれ発生する磁場発生手段と、上記被検体の組織を構成する原子の原子核スピンを励起させる高周波磁場を発生する手段と、上記高周波磁場によって被検体から発生するエコー信号を受信する受信手段と、上記エコー信号を用いて上記被検体の画像を再構成する信号処理手段と、上記磁場発生手段、上記高周波磁場を発生する手段、上記受信手段および上記信号処理手段を所定パルスシーケンスに従い制御する制御手段と、上記傾斜磁場の磁場強度を計測する計測手段と、上記磁場強度を時系列的に表示する手段とを備えた磁気共鳴イメージング装置において、上記時系列的に表示した磁場強度を用いて、上記磁場強度の所望値を入力する手段と、上記所望値より上記磁場強度の時間的変化に関する関係式を作成する手段と、上記関係式を用い、上記傾斜磁場を調整する手段を備えたことを特徴とする磁気共鳴イメージング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002322227A JP2004154302A (ja) | 2002-11-06 | 2002-11-06 | 磁気共鳴イメージング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002322227A JP2004154302A (ja) | 2002-11-06 | 2002-11-06 | 磁気共鳴イメージング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004154302A true JP2004154302A (ja) | 2004-06-03 |
Family
ID=32802473
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002322227A Pending JP2004154302A (ja) | 2002-11-06 | 2002-11-06 | 磁気共鳴イメージング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004154302A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006126044A (ja) * | 2004-10-29 | 2006-05-18 | Chugoku Electric Power Co Inc:The | 容量測定装置 |
-
2002
- 2002-11-06 JP JP2002322227A patent/JP2004154302A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006126044A (ja) * | 2004-10-29 | 2006-05-18 | Chugoku Electric Power Co Inc:The | 容量測定装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4106053B2 (ja) | 磁気共鳴イメージング装置及び渦電流補償導出方法 | |
| KR100481740B1 (ko) | 와전류들에의해유도된공간적및시간적으로변화하는자계들을측정하고보상하는방법 | |
| US6566878B1 (en) | Magnetic resonance imaging device and method therefor | |
| RU2538421C2 (ru) | Картирование градиента восприимчивости | |
| JP2009106493A (ja) | 磁気共鳴検査装置及び高周波パルス波形算出方法 | |
| JP2017530761A (ja) | ゼロエコー時間mrイメージング | |
| JP2010508054A (ja) | 複数の送信コイルを使用したmrirf符号化 | |
| JP4343726B2 (ja) | 磁気共鳴イメージング装置及び不整磁場補正方法 | |
| US7449885B2 (en) | Magnetic resonance imaging method and apparatus | |
| JPH0351172B2 (ja) | ||
| JPH0365971B2 (ja) | ||
| US20020050816A1 (en) | MR imaging method, phase error measuring method, and MRI apparatus | |
| JP4319035B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2009160215A (ja) | 磁気共鳴イメージング装置 | |
| US20040160221A1 (en) | Method to excite planar slices in a magnetic resonance tomography device, accounting for nonlinear gradient fields | |
| CN115144803B (zh) | 磁共振成像系统及其主磁场校正方法、存储介质 | |
| JP2004154302A (ja) | 磁気共鳴イメージング装置 | |
| JP2006061235A (ja) | 磁気共鳴イメージング装置 | |
| JP4146735B2 (ja) | 磁気共鳴イメージング装置 | |
| US12313717B2 (en) | Avoidance of artifacts in measurement data captured using a magnetic resonance system | |
| US20230358838A1 (en) | Method for determining a radio-frequency transmission pulse for a magnetic resonance scan, a magnetic resonance apparatus, and a computer program product | |
| JP4969933B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2695594B2 (ja) | Mri装置 | |
| JP3454865B2 (ja) | 磁気共鳴イメージング装置 | |
| JPS61196146A (ja) | 核磁気共鳴画像装置 |