JP2004155286A - ロープウェイ搬送器位置検出システム - Google Patents
ロープウェイ搬送器位置検出システム Download PDFInfo
- Publication number
- JP2004155286A JP2004155286A JP2002321987A JP2002321987A JP2004155286A JP 2004155286 A JP2004155286 A JP 2004155286A JP 2002321987 A JP2002321987 A JP 2002321987A JP 2002321987 A JP2002321987 A JP 2002321987A JP 2004155286 A JP2004155286 A JP 2004155286A
- Authority
- JP
- Japan
- Prior art keywords
- transporter
- ropeway
- tag
- identification information
- towing line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims description 24
- 230000005540 biological transmission Effects 0.000 claims description 8
- 230000005674 electromagnetic induction Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 description 11
- 238000009434 installation Methods 0.000 description 4
- 238000007726 management method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000000969 carrier Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
Images




Abstract
【解決手段】人を乗せる搬送器(12−i、iは自然数)を、第1曳索(6)に取り付け移動させ、搬送器を第1付替装置(40−4、40−6、40−8、40−9)で第1曳索(6)から第1曳索(6)より低速で移動する第2曳索(7、8、9、10)に付け替え、搬送器(12−i)を第2付替装置(40−5、40−7、40−10、40−1)で第2曳索(7、8、9、10)から第1曳索(6)に付け替えるロープウェイで使用される搬送器(12−i)の位置を検出する位置検出システムにおいて、本発明のロープウェイ搬送器位置検出システムは、搬送器(12−i)に取り付けられ、搬送器(12−i)の識別情報を記憶しているIDタグ(20−i)と、第1付替装置(40−4、40−6、40−8、40−9)もしくは第2付替装置(40−5、40−7、40−10、40−1)を通過する搬送器(12−i)のIDタグ(20−i)から識別情報を読み取る読取装置(30−i)と、読取装置(30−i)がIDタグ(20−i)から読み取った識別情報を取得して、搬送器(12−i)の位置を認識するホストコンピュータ(50)と、を具備する。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、ロープウェイ搬送器の位置検出システムに関し、特に非接触型の情報伝達を利用した位置検出システムに関する。
【0002】
【従来の技術】
ゴンドラやリフトに代表される搬送器を輪状の主曳索に取り付け、曳索を動力滑車などで周回させて、搬送器を移動させるロープウェイがある。
ロープウェイを高速化し、もしくは移送量を増やすためには、搬送器の移動速度が速いことが好ましい。しかし、人が乗り降りする乗降場所では、人が安全に乗降するために、搬送器の移動速度が遅いことが好ましい。
このため、乗降場所では、搬送器を、高速で移動する主曳索から、主曳索より低速で移動する低速曳索に付け替えて低速で移動させ、乗降場所を過ぎた地点で、再度、主曳索に付け替えて高速で移動させるロープウェイがある。
【0003】
運転される搬送器の数は、乗客が多いとき増やされ、少ないとき減らされることが好ましい。
主曳索に取り付けられる搬送器は、運転しながら格納庫に接続された格納用曳索に付け替えられ、格納庫に格納されることができる。さらに、格納用曳索を使用して、格納庫から出されて運転される搬送器が、主曳索に付け替えられることができる。
【0004】
主曳索から低速曳索もしくは格納用曳索への搬送器の付け替えは、付替位置で、搬送器の主曳索に固定している部分の留具が外され、留具の別の部分が、低速曳索もしくは格納用曳索に固定されることにより行われる。低速曳索もしくは格納用曳索から主曳索への付け替えも同様である。
搬送器の付替は、主曳索および低速曳索もしくは格納用曳索が移動しながら行うことができるので、ロープウェイの運転は継続することができる。
付替位置には、留具の曳索に固定されている部分を機械的に外し、留具の他の部分で他の曳索に固定する付替装置が設置されている。
【0005】
運転する搬送器の数を変更する場合、バランス良く搬送器が主曳索に設置されて運転されることが好ましい。
このため、主曳索、低速曳索、格納用曳索に固定されている搬送器の位置は、自動的に検知されていることが好ましい。もしくは格納庫に格納されている搬送器が、自動的に検知されて把握されていることが好ましい。
さらに、搬送器の運転数を減らす場合や、特定の搬送器をメンテナンスしたい場合に、どのタイミングでどの搬送器を格納すればよいか判断するために、搬送器の位置が検知されていることが好ましい。
【0006】
ロープウェイの搬器の位置を曳索の移動量により検出する方法が知られている(例えば特許文献1)。
【0007】
【特許文献1】
特開平5−290296号公報 (第3頁)
【0008】
【発明が解決しようとする課題】
本発明の目的は、搬送器の位置を検出することができるロープウェイ搬送器の位置検出システムを提供することにある。
【0009】
【課題を解決するための手段】
以下に、[発明の実施の形態]で使用する番号・符号を用いて、課題を解決するための手段を説明する。これらの番号・符号は、[特許請求の範囲]の記載と[発明の実施の形態]の記載との対応関係を明らかにするために付加されたものであるが、[特許請求の範囲]に記載されている発明の技術的範囲の解釈に用いてはならない。
【0010】
人を乗せる搬送器(12−i、iは自然数)を、第1曳索(6)に取り付け移動させ、搬送器を第1付替装置(40−4、40−6、40−8、40−9)で第1曳索(6)から第1曳索(6)より低速で移動する第2曳索(7、8、9、10)に付け替え、搬送器(12−i)を第2付替装置(40−5、40−7、40−10、40−1)で第2曳索(7、8、9、10)から第1曳索(6)に付け替えるロープウェイで使用される搬送器(12−i)の位置を検出する位置検出システムにおいて、本発明のロープウェイ搬送器位置検出システムは、搬送器(12−i)に取り付けられ、搬送器(12−i)の識別情報を記憶しているIDタグ(20−i)と、第1付替装置(40−4、40−6、40−8、40−9)もしくは第2付替装置(40−5、40−7、40−10、40−1)を通過する搬送器(12−i)のIDタグ(20−i)から識別情報を読み取る読取装置(30−i)と、読取装置(30−i)がIDタグ(20−i)から読み取った識別情報を取得して、搬送器(12−i)の位置を認識するホストコンピュータ(50)と、を具備する。
【0011】
IDタグ(20−i)は、搬送器(12−i)の識別情報を記憶するメモリ(22)と、IDタグ側送受信部(23)と、IDタグ側アンテナ(24)と、を具備する。
読取装置(30−i)は、読取装置側送受信部(34)と、読取装置側アンテナ(31)と、を具備する。
読取装置(30−i)は、読取装置側アンテナ(31)から、電力送電用電磁波を発信し、IDタグ側アンテナ(24)は電力送電用電磁波を受信して電磁誘導により電力を発生し、この電力により、IDタグ側送受信部(23)は、メモリ(22)に記憶されている搬送器(12−i)の識別情報を含むIDデータを送信し、読取装置(30−i)は、読取装置側アンテナ(31)と読取装置側送受信部(34)によりIDデータを受信して、ホストコンピュータ(50)に出力する。
【0012】
ホストコンピュータ(50)は、制御部(51)と、記憶部(52)と、表示部(53)とを具備する。
記憶部(52)は、複数の読取装置(30−i)の位置と、読取装置(30−i)の識別情報とを関連付けて記憶し、制御部(52)は、複数の読取装置(30−i)からIDデータと、IDデータを読み取った読取装置(30−i)の識別情報とを取得して、搬送器(12−i)の位置を認識し、搬送器(12−i)の位置を表示するように表示部(53)を制御する。
【0013】
第2曳索(7、8、9、10)と、第1付替装置(40−4、40−6、40−8、40−9)と、第2付替装置(40−5、40−7、40−10、40−1)は、搬送器(12−i)に人が乗り降りする乗降部(1、2、3、4)に設置される。
【0014】
第2曳索(7、8、9、10)と、第1付替装置(40−4、40−6、40−8、40−9)と、第2付替装置(40−5、40−7、40−10、40−1)は、搬送器(12−i)を格納する格納部に設置される。
【0015】
本発明のロープウェイシステムは、上記のいずれかに記載されたロープウェイ搬送器位置検出システムと、IDタグ(20−i)が取り付けられた障害者用搬送器(S1)とを具備する。障害者用搬送器(S1)は、ロープウェイ搬送器位置検出システムで位置が検出され、必要に応じて運転、格納される。
【0016】
【発明の実施の形態】
添付図面を参照して、本発明によるロープウェイ搬送器の位置検出システムの実施の形態を以下に説明する。
【0017】
図1に、本発明のロープウェイ搬送器の位置検出システムが設置されるロープウェイの概要が示される。
ロープウェイは、ふもと駅1、第1中間駅2、山頂駅3、第2中間駅4の間を主曳索6に固定されたゴンドラやリフトに代表される搬送器12−i(iは自然数)を周回させることにより人を移送する。
ふもと駅1には、低速曳索7と付替装置40−1、40−9が設置されている。
低速曳索7は、ふもと駅1内で主曳索6より低速で周回している。付替装置40−9は、通過する搬送器12−iを主曳索6から低速曳索7へ付替える。付替装置40−1は通過する搬送器12−iを低速曳索7から主曳索6へ付替える。付替える方法は、公知の技術が使用される。
【0018】
山頂駅3には、低速曳索9と付替装置40−4、40−5が設置されている。
低速曳索9は、山頂駅3内で主曳索6より低速で周回している。付替装置40−4は、通過する搬送器12−iを主曳索6から低速曳索9へ付替える。付替装置40−5は通過する搬送器12−iを低速曳索9から主曳索6へ付替える。付替える方法は、公知の技術が使用される。
【0019】
第1中間駅2には、低速曳索8と付替装置40−2、40−3が設置されている。低速曳索8は、第1中間駅2内で主曳索6より低速で周回している。付替装置40−2は、通過する搬送器12−iを主曳索6から低速曳索8へ付替える。付替装置40−3は通過する搬送器12−iを低速曳索8から主曳索6へ付替える。付替える方法は、公知の技術が使用される。
【0020】
第2中間駅4には、低速曳索10と付替装置40−6、40−7が設置されている。低速曳索10は、第2中間駅4内で主曳索6より低速で周回している。付替装置40−6は、通過する搬送器12−iを主曳索6から低速曳索10へ付替える。付替装置40−7は通過する搬送器12−iを低速曳索10から主曳索6へ付替える。付替える方法は、公知の技術が使用される。
【0021】
以下では、ふもと駅1、山頂駅3、第1中間駅2、第2中間駅4における低速曳索と付替装置の機能は同様であるので山頂駅3を例に説明される。
山頂駅3で、通過する搬送器12−iが主曳索6から低速曳索9へ付替えられるため、人が乗り降りするプラットホームでは搬送器12−iが低速で移動し、乗り降りが安全にできる。しかし、山頂駅3では、搬送器12−iの付替えが行われるので、搬送器12−iが固定されている主曳索6の位置が変化する。このため、主曳索6の移動量だけでは、搬送器12−iの位置を特定することができない。
【0022】
格納庫5は、運転しない搬送器12−iを格納する場所である。格納庫5へは格納庫用曳索11で搬送器12−iが移送される。主曳索6から格納庫用曳索11への搬送器12−iの付替えは、付替装置40−8により行われる。もしくは、低速曳索7から格納庫用曳索11へ付替えが行われる場合もある。格納庫5から主曳索6もしくは低速曳索7へは、格納庫用曳索11で搬送器12−iが格納庫5から移送され、付替装置40−10で主曳索6もしくは低速曳索7に付替えられる。
主曳索6から格納庫用曳索11への搬送器12−iの付替えは、付替装置40−8に指示を与える、もしくは付替装置40−8を操作することにより行われ、格納したい搬送器12−iのみを付替えることができる。
格納庫5では、格納庫用曳索11から搬送器12−iが取り外されて保管される。保管されている搬送器12−iは、格納庫用曳索11に取り付けられることもできる。
【0023】
本発明のロープウェイ搬送器の位置検出システムは上記のロープウェイに設置される。
位置検出システムは、各搬送器12−iに取り付けられるIDタグ20−iと、付替装置40−1〜40−10の近傍設置される読取装置30−1〜30−10と、ホストコンピュータ50を具備する。
読取装置30−iは、読取装置30−iの近傍を搬送器12−iが通過した時に、搬送器12−iに取り付けられているIDタグ12−iに記憶されている識別情報を読み取ることができる。付替装置40−1〜40−10を通過する搬送器12−iのIDタグ20−iを読み取ることで、搬送器12−iの通過位置と時間を検出することができる。
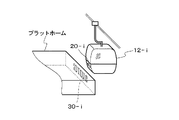
図2に、搬送器12−i、IDタグ20−iと読取装置30−iの設置概要が示される。読取装置30−iは、駅のプラットホームなどに、予め設定された場所を通過する搬送器12−iに取り付けられたIDタグ10−iを読み取れるように設置される。
IDタグ20−iは、読取装置30−iに読み取られるように搬送器12−iの一部に取り付けられる。
【0024】
図3に位置検出システムの構成が示される。位置検出システムは、各々の搬送器12−iに取り付けられたIDタグ20−iと、乗換駅や付替えヶ所に設置される読取装置30−iと、読取装置30−iの情報を統合して搬送器12−iの位置を記録、演算するホストコンピュータ50と、を具備する。読取装置30−iとホストコンピュータ50の間は、有線もしくは無線のネットワークで接続されている。
【0025】
図4に、IDタグ20−i、読取装置30−i、ホストコンピュータ50の構成が示される。
【0026】
IDタグ20−1〜20−n(nは自然数、iは代表するいずれかの数、以下同じ)は、複数の搬送器12−1〜12−nの各々に取り付けられ搬送器12−iを識別するためのユニークな識別情報を記憶している。
IDタグ20−iは、ICチップ21とアンテナ24を具備する。ICチップ21は、メモリ22と送受信部23を具備する。
アンテナ24は、通過する場所に設置された読取装置30−iから電波を受信することにより電磁誘導により電力を発生する。アンテナ24が発生した電力により、送受信部23が、メモリ22に記憶されている識別情報をアンテナ24から送信する。IDタグ20−iには、公知の非接触型カードの情報通信の方法を使用することができる。電磁誘導により電力を発生することにより、IDタグ20−iは電源を有する必要がない。
【0027】
読取装置30−iは、アンテナ31、リーダ・ライタ32を具備する。
リーダ・ライタ32は制御部33と送受信部34を具備する。
読取装置30−iとホストコンピュータ50の間は、有線もしくは無線のネットワークで接続されている。
アンテナ31は、IDタグ20−iへ電波を発信し、IDタグ20−iから識別情報を含む情報を受信する。送受信部34は、電波の発信、情報受信を行う。
制御部33は、送受信部34を制御する。
読取装置30−iが受信したIDタグ20−iの識別情報を含む情報は、受信した当該読取装置30−iの識別情報および通過時刻とが関連付けられてホストコンピュータ50に送信される。
【0028】
ホストコンピュータ50は、制御部51、記憶部52、表示部53、入力部54を具備する。
【0029】
制御部51はCPUを含む演算部門で、記憶部52からの情報の読み出しおよび書き込み、表示部53の表示の制御、入力部54からの情報の処理を行う。さらに、制御部51は、各読取装置30−iから取得した、IDタグ20−iの識別情報とそれを受信した読取装置30−iの識別情報および通過時刻から、搬送器12−iの位置を把握する。制御部51は、読取装置30−iの識別情報から、記憶部52に記憶されている各読取装置30−iの設置場所と各読取装置30−iの識別情報を関連付ける情報を参照して、読取装置30−iの位置を把握し、その読取装置30−iの位置と受信時間から搬送器12−iの位置を演算することができる。
さらに、制御部51は、読取装置30−iからの情報に加え、ロープウェイ運転制御装置もしくは各種センサ(図示無し)から入手する主曳索6、低速曳索7、8、9,10、格納庫用曳索11の移動速度を使用して、搬送器12−iの位置を演算する場合がある。
【0030】
記憶部52は、ハードディスクに例示されるデータ記憶装置で、各読取装置30−iの設置場所と各読取装置30−iの識別情報を関連付ける情報、ロープウェイの概要および配置を含む配置図、制御部51が演算した搬送器12−iの位置を記憶する。
【0031】
表示部53は、CRTなどの表示装置に例示され、制御部51が取得した搬送器12−iの位置を識別可能に表示する。表示部53の表示の例は後述される。
【0032】
入力部54はキーボードに例示され、入力部54から、表示部53の表示の切替や、搬送器12−iの出し入れの指示が入力される場合がある。
【0033】
ホストコンピュータ50は、ロープウェイの運転管理システムと接続され、搬送器12−iの出し入れや運転台数の指示、主曳索6および低速曳索7、8、9、10、格納庫用曳索11の速度の指示、格納庫用曳索11へ指定した搬送器12−iの付替え指示をすることができることが好ましい。
【0034】
図5に、表示部53の表示の例が示される。図5は表示部53の画面60を示す。画面60には、ロープウェイの運行状況が可視しやすいように模式図61で示される。模式図61上では、ホストコンピュータ50が把握した搬送器12−iの位置に基づいて、搬送器12−iを表す表示が移動し、ロープウェイの運転管理者に可視可能に表示する。各搬送器12−iの表示の移動には、主曳索6、低速曳索7、8、9,10、格納庫用曳索11の移動速度が参照される場合がある。各搬送器12−iを表す部分には、搬送器12−iの識別情報が示されることが好ましい。さらに格納庫を示す部分62には、格納されている搬送器12−iの台数が表示される。
さらに画面60は、現在の搬送器12−iの運転台数の表示63、格納台数の表示64、運転している搬送器12−iのリスト65、格納している搬送器12−iのリスト66が表示されることが好ましい。
さらに、ホストコンピュータ50がロープウェイ運転管理システムと接続されている場合、画面60は、運転台数指示の表示67、格納庫から出庫して運転する搬送器を示す識別情報の表示68、格納庫へ入庫して格納する搬送器を示す識別情報の表示69を含む場合がある。もしくは、画面60上に、出庫指示、入庫指示、速度調整のいずれかを含む必要な指示を入力することができるように構成することができる。
さらに、画面60は、センサ(図示なし)から受信される主曳索6の速度の表示70、低速曳索7、8、9,10、格納庫用曳索11の速度の表示(図示無し)を表示できることが望ましい。
【0035】
さらに、搬送器12−iとして特殊な搬送器S1を運転する場合、画面60に、特殊な搬送器S1の位置を表示させることができる。特殊な搬送器S1の例は、車椅子用を含む障害者用の搬送器S1に例示される。特殊な搬送器S1は、常時使用されない場合があるので、本システムの位置検出システムを使用することで、位置が把握でき、搬送器S1の出庫、入庫の作業が容易にできる。
【0036】
本発明の位置検出システムは、搬送器12−iの位置を検出することで、ロープウェイの運転状況が把握できる上、搬送器12−iの出庫・入庫の状況を把握できる。さらに、本発明の位置検出システムを、ロープウェイ運転管理システムに組み入れることで、搬送器12−iの出庫・入庫を自動化、および各曳索の速度制御をすることもできる。
さらに、本発明の位置検出システムは、非接触型の情報読取装置を使用しているので、バーコード読取に比べ汚れの影響を受けにくい。また、IDタグ20−iが電源を必要とせず、設置が容易である。
【0037】
【発明の効果】
本発明のロープウェイ搬送器の位置検出システムは、搬送器の位置を検出することができる。
【図面の簡単な説明】
【図1】図1は、本発明のロープウェイ搬送器の位置検出システムが設置されるロープウェイの概要を示す。
【図2】図2は、搬送器、IDタグと読取装置の設置概要を示す。
【図3】図3は、位置検出システムの構成を示す。
【図4】図4は、IDタグ、読取装置、ホストコンピュータの構成を示す。
【図5】図5は、表示部に表示される画面の例を示す。
【符号の説明】
1 ふもと駅
2 第1中間駅
3 山頂駅
4 第2中間駅
5 格納庫
6 主曳索
7 (ふもと駅の)低速曳索
8 (第1中間駅の)低速曳索
9 (山頂駅の)低速曳索
10 (第2中間駅の)低速曳索
11 格納庫用曳索
12−1〜12−n 搬送器
20−1〜20−n IDタグ
21 ICチップ
22 メモリ
23 (ICチップの)送受信部
24 (ICチップの)アンテナ
30−1〜30−10 読取装置
31 (読取装置の)アンテナ
32 リーダ・ライタ
33 (読取装置の)制御部
34 (読取装置の)送受信部
40−1〜40−10 付替装置
50 ホストコンピュータ
51 (ホストコンピュータの)制御部
52 記憶部
53 表示部
54 入力部
Claims (6)
- 人を乗せる搬送器を、第1曳索に取り付け移動させ、前記搬送器を第1付替装置で前記第1曳索から前記第1曳索より低速で移動する第2曳索に付け替え、前記搬送器を第2付替装置で前記第2曳索から前記第1曳索に付け替えるロープウェイで使用される前記搬送器の位置を検出する位置検出システムにおいて、
前記搬送器に取り付けられ、前記搬送器の識別情報を記憶しているIDタグと、
前記第1付替装置もしくは前記第2付替装置を通過する前記搬送器の前記IDタグから前記識別情報を読み取る読取装置と、
前記読取装置が前記IDタグから読み取った前記識別情報を取得して、前記搬送器の位置を認識するホストコンピュータと、
を具備する、
ロープウェイ搬送器位置検出システム。 - 前記IDタグは、前記搬送器の識別情報を記憶するメモリと、IDタグ側送受信部と、IDタグ側アンテナと、を具備し、
前記読取装置は、読取装置側送受信部と、読取装置側アンテナと、を具備し、
前記読取装置は、前記読取装置側アンテナから、電力送電用電磁波を発信し、
前記IDタグ側アンテナは前記電力送電用電磁波を受信して電磁誘導により電力を発生し、前記電力により、前記IDタグ側送受信部は、前記メモリに記憶されている前記搬送器の識別情報を含むIDデータを送信し、
前記読取装置は、前記読取装置側アンテナと前記読取装置側送受信部により前記IDデータを受信して、前記ホストコンピュータに出力する、
請求項1に記載されたロープウェイ搬送器位置検出システム。 - 前記ホストコンピュータは、制御部と、記憶部と、表示部とを具備し、
前記記憶部は、複数の前記読取装置の位置と、前記読取装置の識別情報とを関連付けて記憶し、
前記制御部は、複数の前記読取装置から前記IDデータと、前記IDデータを読み取った前記読取装置の識別情報とを取得して、前記搬送器の位置を表示するように前記表示部を制御する、
請求項2に記載されたロープウェイ搬送器位置検出システム。 - 前記第2曳索と、前記第1付替装置と、前記第2付替装置は、前記搬送器に人が乗り降りする乗降部に設置される、
請求項1〜3のいずれかに記載されたロープウェイ搬送器位置検出システム。 - 前記第2曳索と、前記第1付替装置と、前記第2付替装置は、前記搬送器を格納する格納部に設置される、
請求項1〜3のいずれかに記載されたロープウェイ搬送器位置検出システム。 - 請求項1〜5のいずれかに記載されたロープウェイ搬送器位置検出システムと、
前記IDタグが取り付けられた障害者用搬送器とを具備し、
前記障害者用搬送器は、前記ロープウェイ搬送器位置検出システムで位置が検出され、必要に応じて運転、格納される、
ロープウェイシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002321987A JP2004155286A (ja) | 2002-11-06 | 2002-11-06 | ロープウェイ搬送器位置検出システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002321987A JP2004155286A (ja) | 2002-11-06 | 2002-11-06 | ロープウェイ搬送器位置検出システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004155286A true JP2004155286A (ja) | 2004-06-03 |
Family
ID=32802300
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002321987A Pending JP2004155286A (ja) | 2002-11-06 | 2002-11-06 | ロープウェイ搬送器位置検出システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004155286A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011251672A (ja) * | 2010-06-04 | 2011-12-15 | Mitsubishi Electric Corp | 列車位置情報管理システム |
| CN105793137A (zh) * | 2013-12-05 | 2016-07-20 | 波马公司 | 特别为架空椅或架空缆车的通过空中缆绳的传输系统 |
| JP2018095250A (ja) * | 2016-12-12 | 2018-06-21 | ポマPoma | ケーブルによって牽引されて輸送される車両のための方法および装置 |
| CN111428829A (zh) * | 2020-03-13 | 2020-07-17 | 浙江衣拿智能科技股份有限公司 | 一种载具监控系统及其监控方法 |
| JP2020525352A (ja) * | 2017-07-04 | 2020-08-27 | インノヴァ・パテント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | ロープウェイ及びロープウェイを動かすための方法 |
| JP2023180628A (ja) * | 2022-06-10 | 2023-12-21 | 日本ケーブル株式会社 | 索道における電力供給装置 |
-
2002
- 2002-11-06 JP JP2002321987A patent/JP2004155286A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011251672A (ja) * | 2010-06-04 | 2011-12-15 | Mitsubishi Electric Corp | 列車位置情報管理システム |
| CN105793137A (zh) * | 2013-12-05 | 2016-07-20 | 波马公司 | 特别为架空椅或架空缆车的通过空中缆绳的传输系统 |
| KR20160093631A (ko) * | 2013-12-05 | 2016-08-08 | 포마 | 가공 케이블 수송 시스템, 특히 체어리프트 또는 케이블 카 |
| JP2017501073A (ja) * | 2013-12-05 | 2017-01-12 | ポマPoma | 空中ケーブルによる輸送システム、特にチェア・リフト又はゴンドラ・リフト |
| EP3077265B1 (fr) | 2013-12-05 | 2020-01-22 | Poma | Système de transport par câble aérien, notamment un télésiège ou télécabine |
| KR102241790B1 (ko) * | 2013-12-05 | 2021-04-16 | 포마 | 가공 케이블 수송 시스템, 특히 체어리프트 또는 케이블 카 |
| JP2018095250A (ja) * | 2016-12-12 | 2018-06-21 | ポマPoma | ケーブルによって牽引されて輸送される車両のための方法および装置 |
| JP2020525352A (ja) * | 2017-07-04 | 2020-08-27 | インノヴァ・パテント・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング | ロープウェイ及びロープウェイを動かすための方法 |
| CN111428829A (zh) * | 2020-03-13 | 2020-07-17 | 浙江衣拿智能科技股份有限公司 | 一种载具监控系统及其监控方法 |
| JP2023180628A (ja) * | 2022-06-10 | 2023-12-21 | 日本ケーブル株式会社 | 索道における電力供給装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE59508377D1 (de) | Aufzugsanlage mit Erkennungsvorrichtung | |
| JP4038443B2 (ja) | コンテナ装置及びコンテナ管理システム | |
| KR101766901B1 (ko) | IoT 기반의 교통약자 배려 유도시스템 | |
| EP1352764A3 (en) | A method of monitoring a tire condition using a drive over reader | |
| JP2004155286A (ja) | ロープウェイ搬送器位置検出システム | |
| JP4943062B2 (ja) | 循環式索道の閉鎖型搬器 | |
| KR102440546B1 (ko) | 블루투스를 활용한 버스 승차요금 결제방법 | |
| CN104058306A (zh) | 一种电梯智能调度系统 | |
| JP2005107792A (ja) | Icタグ、それを用いた物品管理システム、それを用いた入出管理システム及びそれを用いた追尾システム | |
| CN206400781U (zh) | 一种识别车位忙闲的检测系统及其检测装置 | |
| US7246689B2 (en) | Self-powered elevator button | |
| CN208270049U (zh) | 车辆称重系统及车辆称重管理系统 | |
| JP6475600B2 (ja) | エレベータシステム | |
| JP2006163819A (ja) | 非接触icカードリーダライタ装置およびその制御方法、データ交信方法 | |
| KR102353582B1 (ko) | 열차자율주행을 위한 rfid 보조 센서 시스템 | |
| JP3171310B2 (ja) | 移動体検出装置 | |
| JP6576718B2 (ja) | サーバ装置およびチェックインシステム | |
| EP1061483A3 (en) | Information processing apparatus and method, information processing system, and medium | |
| JPH10209930A (ja) | 所在確認装置 | |
| JP3133681U (ja) | 駐車場管理システム | |
| JP2005190160A (ja) | 車両内個人認証システム | |
| CN120402171A (zh) | 一种电机车与架空乘人装置的闭锁系统及方法 | |
| JPH09223253A (ja) | 搭乗管理装置 | |
| JPH06168366A (ja) | 移動物体の管理方法 | |
| CN203321595U (zh) | 一种井下的便携式定位装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20040913 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20040913 |
|
| A621 | Written request for application examination |
Effective date: 20051025 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080925 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20081029 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090331 |