JP2004155342A - パワーステアリング装置 - Google Patents
パワーステアリング装置 Download PDFInfo
- Publication number
- JP2004155342A JP2004155342A JP2002323761A JP2002323761A JP2004155342A JP 2004155342 A JP2004155342 A JP 2004155342A JP 2002323761 A JP2002323761 A JP 2002323761A JP 2002323761 A JP2002323761 A JP 2002323761A JP 2004155342 A JP2004155342 A JP 2004155342A
- Authority
- JP
- Japan
- Prior art keywords
- braking
- sudden braking
- current command
- vehicle speed
- command value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【解決手段】コントローラCには、急制動判定手段20を備え、この急制動判定手段20の信号で切替手段21を切り換える。切替手段21によって急制動時ソレノイド電流指令値Iaあるいは基本ソレノイド電流指令値Ibが選択される。急制動判定手段20は、急制動を判定するために、上記車速信号vから所定時間内での車速の減少率を検出し、この減少率が基準値以上であるかどうかを判断する。上記減少率が基準値以上であった場合には、急制動であると判断し、切替手段21を切り換えて、急制動時ソレノイド電流指令値Iaを選択する。上記減少率が基準値よりも小さかった場合には、急制動判定手段20は、急制動していない通常走行時であると判断して、基本ソレノイド電流指令値Ibを出力する。
【選択図】 図1
Description
【発明の属する技術分野】
この発明は、パワーシリンダ側に導く流量を制御する流量制御弁を備えたパワーステアリング装置に関する。
【0002】
【従来の技術】
従来の流量制御装置として、例えば特許文献1に記載されたものが知られている。この従来例を示したのが図2である。
図示したように、流量制御弁Vに、ポンプPを接続している。
上記流量制御弁Vのスプール1は、その一端を一方のパイロット室2に臨ませ、他端を他方のパイロット室3に臨ませている。上記一方のパイロット室2は、ポンプポート4を介してポンプPに常時連通している。また、他方のパイロット室3にはスプリング5を介在させている。このようにした両パイロット室2,3は、ソレノイドSOLの励磁電流Iに応じて開度を制御する可変オリフィスaを介して、たがいに連通している。
【0003】
すなわち、一方のパイロット室2は、流路6→可変オリフィスa→流路7を経由してパワーシリンダ8を制御するステアリングバルブ9の流入側に連通している。また、他方のパイロット室3は、流路10および流路7を介してステアリングバルブ9の流入側に連通している。
したがって、上記両パイロット室2,3は、可変オリフィスaを介して連通することになり、可変オリフィスaの上流側の圧力が一方のパイロット室2に作用し、下流側の圧力が他方のパイロット室3に作用することになる。
【0004】
そして、スプール1は、一方のパイロット室2の作用力と、他方のパイロット室3の作用力およびスプリング5の作用力とがバランスした位置を保つが、そのバランス位置において、前記タンクポート11の開度が決められる。
今、エンジン等からなるポンプ駆動源12が停止していると、ポンプポート4に圧油が供給されない。ポンプポート4に圧油が供給されなければ、両パイロット室2,3には圧力が発生しないので、スプール1はスプリング5の作用で図示のノーマル位置を保つ。
【0005】
上記の状態からポンプPが駆動して、ポンプポート4に圧油が供給されると、可変オリフィスaに流れができるので、そこに差圧が発生する。この差圧の作用で、両パイロット室2,3に圧力差が発生し、この圧力差に応じてスプール1がスプリング5に抗して移動し、上記バランス位置を保つ。
このようにスプール1がスプリング5に抗して移動することによって、タンクポート11の開度を大きくするが、このときのタンクポート11の開度に応じて、ステアリングバルブ9側に導かれる制御流量QPと、タンクTあるいはポンプPに還流される戻り流量QTの分配比が決まる。言い換えれば、タンクポート11の開度に応じて制御流量QPが決まることになる。
【0006】
上記のように制御流量QPが、スプール1の移動位置で決まるタンクポート11の開度に応じて制御されるということは、結局は、可変オリフィスaの開度に応じて制御流量QPが決まることになる。なぜなら、スプール1の移動位置は、両パイロット室2,3の圧力差で決まるとともに、この圧力差を決めているのが可変オリフィスaの開度だからである。
【0007】
したがって、車速や操舵状況に応じて、制御流量QPを制御するためには、可変オリフィスaの開度、すなわちソレノイドSOLの励磁電流を制御すればよいことになる。
なぜなら、可変オリフィスaは、ソレノイドSOLの励磁電流の大きさによって、開度を最大から最小まで任意に制御できるからである。
【0008】
なお、前記ステアリングバルブ9は、図示していないステアリングホィールの入力トルク(操舵トルク)に応じて、パワーシリンダ8の圧力を制御するものである。例えば、操舵トルクが大きければ、パワーシリンダ8への供給量を大きくし、操舵トルクが小さければそれに応じてパワーシリンダ8の圧力を小さくするようにしている。この操舵トルクとステアリングバルブ9の切り換え量は、図示していないトーションバーなどのねじれ反力によって決まることになる。
【0009】
上記のように操舵トルクが大きいときに、ステアリングバルブ9の切り換え量を大きくすれば、その分、パワーシリンダ8によるアシスト力が大きくなる。反対に、ステアリングバルブ9の切り換え量を小さくすれば、上記アシスト力は小さくなる。
そして、ピストンの移動速度によって決まるパワーシリンダ8の必要(要求)流量QMと、流量制御弁Vで決められる制御流量QPとをなるべく等しくすれば、ポンプP側のエネルギー損失を低く抑えることができる。なぜなら、ポンプP側のエネルギー損失は、制御流量QPとパワーシリンダ8の必要流量QMとの差によって発生するからである。
【0010】
上記のように制御流量QPを、パワーシリンダ8の必要流量QMにできるだけ近づけるために、可変オリフィスaの開度を制御するのが、ソレノイドSOLに対するソレノイド電流指令値SIであり、このソレノイド電流指令値SIを制御するのが、コントローラCである。
このコントローラCには、操舵角センサ16と車速センサ17とを接続し、これら両センサの出力信号に基づいて、ソレノイドSOLの励磁電流を制御するようにしている。
【0011】
なお、図中符号18はスプール1の先端に形成したスリットで、スプール1が図示の位置にあるときにも、このスリット18を介して一方のパイロット室2が流路7に常時連通するようにしている。言い換えると、スプール1が図示の状態にあって、流路6を閉じているようなときにも、ポンプPの吐出油が、このスリット18を介して、ステアリングバルブ9側に供給されるようにしている。
【0012】
このように微少流量であるが、ステアリングバルブ9側に圧油を供給するようにしたのは、キックバック等の外乱の防止、および応答性の確保を目的にしているからである。
なお、符号19は、コントローラCとソレノイドSOLとの間に接続したソレノイドSOLの駆動装置ある。
また、符号13,14は絞りであり、符号15はリリーフ弁である。
【0013】
【特許文献1】
特開2001−260917号公報(第3〜6頁、図1)
【0014】
【発明が解決しようとする課題】
上記のような従来の装置では、コントローラCに車速センサを接続し、このセンサの出力信号に基づいて、ソレノイドSOLの励磁電流を制御するようにしている。すなわち、車速が速くなれば、コントローラCから出力される基本ソレノイド電流指令値Ibが小さくなるようにしている。基本ソレノイド電流指令値Ibが小さければ、可変オリフィスaの開度は小さく保たれ、パワーシリンダへの供給流量が減少される。
しかし、上記パワーシリンダへの供給流量が少ない高速走行状態に、障害物等を避けようとして、急ブレーキをかけて急操舵しようとした場合には、パワーシリンダの出力不足によってタイヤの転舵に遅れが生じるという問題があった。その理由は以下の通りである。
【0015】
上記高速走行中に急ブレーキを踏んだりして急制動すると、車両の前輪軸荷重が増加する。前輪軸荷重が増加すれば、この前輪を転舵するのに、通常よりも大きな力が必要となる。ところが、上記高速走行中にはパワーシリンダへの供給流量が少なくなっているので、このパワーシリンダによるアシスト力も小さくなっている。
【0016】
つまり、上記高速走行中に急制動した状態で、前輪を転舵しようとした場合には、パワーシリンダの大きなアシスト力が必要なのに、パワーシリンダへの供給流量が少なくなるように制御されているので、このパワーシリンダの出力不足が発生し、タイヤの転舵に遅れが発生するのである。
しかも、上記高速走行中に急ブレーキを踏んで、急操舵しようとした場合というのは、障害物を回避しようとしたときである。障害物を回避しようとしたときに、タイヤの転舵に遅れが発生すると、回避遅れが発生するおそれがある。
【0017】
この発明の目的は、高速走行中に急制動をして、急操舵しようとしたときにパワーシリンダの出力不足を解消することができるパワーステアリング装置を提供することである。
【0018】
【課題を解決するための手段】
第1の発明は、パワーシリンダを制御するステアリングバルブと、このステアリングバルブの上流側に設けた可変オリフィスと、この可変オリフィスの開度を制御するソレノイドと、このソレノイド励磁電流を制御するコントローラと、ポンプから供給される流量を上記可変オリフィスの開度に応じてステアリングバルブに導く制御流量とタンクまたはポンプに環流させる戻り流量とに分配する流量制御弁と、車速を検出する車速センサと、車両の急制動を検出する急制動検出手段とを備え、上記コントローラは車速に基づいてソレノイド励磁電流の基礎となる基本ソレノイド電流指令値Ibを出力するとともに、上記急制動検出手段からの信号によって急制動と判断した場合には、急制動時ソレノイド電流指令値Iaを出力して、上記可変オリフィスの開度を相対的に大きくすることを特徴とする。
【0019】
第2の発明は、急制動検出手段として車速センサを用い、コントローラは、所定時間内での車速の減少率が基準値以上のとき、急制動と判断することを特徴とする。
第3の発明の急制動検出手段は、所定時間内でのブレーキペダルの移動量を検出するとともに、コントローラは、上記移動量が基準値以上のとき、急制動と判断することを特徴とする。
【0020】
第4の発明の急制動検出手段は、所定時間内でのブレーキブースターの圧力上昇率を検出するとともに、コントローラは、上記圧力上昇率が基準値以上のとき、急制動と判断することを特徴とする。
【0021】
【発明の実施の形態】
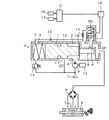
図1に示したこの発明の実施形態は、急制動時には急制動時ソレノイド電流指令値Iaを選択し、通常時には基本ソレノイド電流指令値Ibを選択する点に特徴を有し、その他の構成については図2に示した前記従来例と同じである。
以下では、コントローラCについて詳細に説明し、従来と同じ構成要素については同じ符号を付してその説明を省略する。
【0022】
上記コントローラCには、急制動回路系Aと基本回路系Bとを備え、上記急制動回路系Aからは急制動時ソレノイド電流指令値Iaが出力され、基本回路系Bからは基本ソレノイド電流指令値Ibが出力されるようにしている。
また、上記コントローラCには、急制動判定手段20を備え、この急制動判定手段20の信号で切替手段21を切り換えるようにしている。この切替手段21を切り換えることによって、上記急制動時ソレノイド電流指令値Iaあるいは基本ソレノイド電流指令値Ibの何れかが選択されるようにしている。
なお、この実施形態では、上記切替手段21は、通常基本ソレノイド電流指令値Ibを出力し、この切替手段21が切り替えられたときに急制動時ソレノイド電流指令値Iaを出力するようにしている。
【0023】
さらに、上記コントローラCには、操舵角センサ16と車速センサ17とを接続して、このコントローラCに操舵角信号θ、操舵角速度信号ω、および車速信号vを入力するようにしている。
上記操舵角信号θは、操舵角センサ16によって検出した操舵角に基づいて算出し、車速信号vは、車速センサ17によって検出した車速に基づいて算出している。また、操舵角速度信号ωは、上記操舵角信号θを微分して算出したものである。ただし、この操舵角速度信号ωは、操舵角速度センサを別に設けて、この操舵角速度センサによって直接求めてもよい。
【0024】
上記急制動判定手段20は、急制動を判定するために、上記車速信号vから所定時間内での車速の減少率を検出し、この減少率が基準値以上であるかどうかを判断する。例えば、車速が100km/hから40km/hへと減速したとき、この所定時間内での減少率を基準値以上として判断するようにしている。そして、上記減少率が基準値以上であった場合には、急制動であると判断し、切替手段21を切り換えて、急制動時ソレノイド電流指令値Iaを選択する。
一方、上記減少率が基準値よりも小さかった場合には、急制動判定手段20は、急制動していない通常走行時であると判断して、上記切替手段21を切り換えることなく基本ソレノイド電流指令値Ibを出力する。なお、上記減少率の基準値は、各車の特性にあわせて設定することができる。
【0025】
上記基本回路系Bでは、以下のようにして基本ソレノイド電流指令値Ibを決定している。
図1に示したように、コントローラCには、操舵角信号θ、操舵角速度信号ω、および車速信号vを入力する。コントローラCは、上記操舵角信号θに基づいてソレノイド電流指令値Iθを決定するが、このソレノイド電流指令値Iθは、その操舵角信号θと制御流量QPとの関係がリニアな特性になる理論値に基づいて決めている。また、操舵角速度信号ωに基づいてソレノイド電流指令値Iωを決定するが、ソレノイド電流指令値Iωも、操舵角速度信号ωと制御流量QPとがリニアな特性になる理論値に基づいて決めている。
【0026】
ただし、ソレノイド電流指令値Iθおよびソレノイド電流指令値Iωは、操舵角信号θおよび操舵角速度信号ωが、ある設定値以上にならなければいずれもゼロを出力するようにしている。つまり、ステアリングホィールが中立あるいはその近傍にあるときには、上記ソレノイド電流指令値IθもIωもゼロになるようにしている。
【0027】
また、上記ソレノイド電流指令値Iθ、Iωは、テーブル値としてコントローラCにあらかじめ記憶させておいてもよいし、操舵角信号θあるいは操舵角速度信号ωを基にして、その都度コントローラCに演算させるようにしてもよい。
いずれにしてもソレノイド電流指令値Iθとソレノイド電流指令値Iωとを決定したら、これら両者を加算する。
【0028】
上記のようにして両ソレノイド電流指令値Iθ、Iωを加算したら、この加算値(Iθ+Iω)に、車速信号vに基づいたソレノイド電流指令値Ivを乗算する。
この車速信号vに基づいたソレノイド電流指令値Ivは、車速が低速域では1を出力し、高速域ではゼロを出力する。また、低速域と高速域との間の中速域では、1からゼロまでの小数点以下の値を出力するようにしている。
【0029】
したがって、上記加算値(Iθ+Iω)に車速信号vに基づいたソレノイド電流指令値Ivを乗算すれば、低速域では(Iθ+Iω)がそのまま出力され、高速域では(Iθ+Iω)がゼロになる。
また、中速域では、速度が上がれば上がるほどそれに反比例した値が出力されることになる。
上記基本回路系Bでは、上記(Iθ+Iω)×Ivを基本ソレノイド電流指令値Ibとして出力する。
【0030】
一方、車速の減少率が一定以上であった場合には、上記判定手段20よって急制動回路系Aから急制動時ソレノイド電流指令値Iaが選択されるが、この急制動時ソレノイド電流指令値Iaは、急制動時でも即座にタイヤを転舵できるような値に設定している。すなわち、少なくとも高速走行時の基本ソレノイド電流指令値Ibよりも大きな指令値となるように、上記急制動時ソレノイド電流指令値Iaを設定している。
【0031】
なお、切替手段21によって、基本ソレノイド電流指令値Ibあるいは急制動時ソレノイド電流指令値Iaの何れかが選択されたら、これら選択されたソレノイド電流指令値Ia、Ibには、スタンバイソレノイド電流指令値Isを加算する。そして、これをソレノイド電流指令値IとしてコントローラCから出力し、このソレノイド電流指令値Iを基にソレノイド励磁電流を制御する。
【0032】
上記スタンバイソレノイド電流指令値Isは、可変オリフィスaの開度を制御するソレノイドSOLに所定の電流が常に供給されるようにするためのものである。つまり、操舵角信号θ、操舵角速度信号ωおよび車速信号vに基づいたソレノイド電流指令値が全てゼロの場合でも、スタンバイソレノイド電流指令値Isによって可変オリフィスaが一定の開度を保ち、所定のスタンバイ流量QSがステアリングバルブ9側に常に供給されるようにしている。
【0033】
このように一定のスタンバイ流量QSを確保する理由は、以下の通りである。すなわち、タイヤにキックバック等の外乱やセルフアライニングトルク等による抗力が作用すると、それがパワーシリンダ8のロッドに作用するが、このような場合であっても、スタンバイ流量QSを確保しておけば、タイヤがふらつくのを防止できるからである。また、スタンバイ流量QSを確保しておけば、それが全然ないときよりも、目的の制御流量に短時間で達することができる分、応答性を向上させることができるからである。
また、どんな場合でもスタンバイ流量は必ず確保されるので、低速域での直進走行時であっても、キックバック等による外乱に対抗でき、また、操舵時の応答性も良好に保つことができる。
【0034】
上記のような実施形態では、急制動時ソレノイド電流指令値Iaを高速走行時に出力される基本ソレノイド電流指令値Ibよりも大きな値にしているので、その分、可変オリフィスaの開度を大きく保つことができ、パワーシリンダの出力を大きくすることができる。
したがって、急制動時であっても、パワーシリンダの出力不足によって、操舵に遅れが発生するのを防止できる。
【0035】
さらに、急制動検出手段として車速センサ17を用いているが、このように、既存の車速センサ17の車速信号vを基にして、急制動を検出することができるので、急制動検出のために特別なセンサ等を備える必要がない。特別なセンサ等を備える必要がないので、大幅なコストアップをすることなく、上記急制動の検出が可能となる。
【0036】
また、上記実施形態では、高速走行時に急制動をした場合について説明しているが、この基準値を例えば70km/hから30km/hに減速したような場合に設定すれば、高速走行時だけでなく中速走行時に急制動した場合についても、これを検出することができる。
【0037】
なお、上記急制動の検出を所定時間内での車速の減少率を基にして行っているが、この車速の減少率を検出するということは、要するに、車両の加速度を検出しているということである。したがって、上記急制動検出手段として、加速度センサを別に設けるようにしてもよい。このように加速度センサを用いた場合には、加速度が一定値よりも大きくなった場合に、急制動状態であると判断するようにする。
上記加速度センサを用いた場合には、直接加速度を測定することができるので、より一層応答性を向上させることができる。
【0038】
また、上記急制動検出手段として、所定時間内でのブレーキペダルの移動量を検出するようにしてもよい。そして、この移動量が基準値よりも大きいとき、急制動時であると判断する。
上記ブレーキペダルの所定時間内での移動量が大きいというのは、瞬時にブレーキペダルを踏み込んだ状態である。言い換えれば、急ブレーキを踏んだときである。したがって、上記ブレーキペダルの移動量を検出することによって、急制動を判断することができる。
【0039】
さらに、上記急制動検出手段として、所定時間内でのブレーキブースターの圧力上昇を検出するようにしてもよい。そして、この圧力上昇率が基準値よりも大きいとき、急制動であると判断する。
上記ブレーキブースターの圧力上昇率が大きいときというのは、瞬時にブレーキペダルをたくさん踏み込んだ状態であり、急ブレーキを踏んだときである。このように急ブレーキを踏んだときには、上記ブレーキブースターの圧力が急激に上昇する。
したがって、上記ブレーキブースターの圧力上昇率を検出することによって、急制動を検出することができる。
【0040】
上記ブレーキペダルの移動量、あるいはブレーキブースターの圧力上昇率を検出することによって、急制動に対する応答性をより一層向上させることができる。なぜなら、ブレーキを踏むという行為は急制動時の最初のアクションであり、この最初のアクションを直接検出することができるので、より速やかに急制動を検出することができるからである。
【0041】
【発明の効果】
第1の発明によれば、急制動検出手段からの信号によって急制動と判断した場合には、制動時ソレノイド電流指令値Iaを出力して、可変オリフィスの開度を相対的に大きくするようにしたので、急制動時でもパワーシリンダの流量不足が発生することがない。したがって、障害物の回避遅れを防止することができる。
【0042】
第2の発明によれば、急制動検出手段として車速センサを用い、所定時間内での車速の減少率が基準値以上のとき、コントローラが急制動と判断することとしたので、特別に検出手段を設ける必要がない。したがって、その分、コストの低減を図ることができる。
【0043】
第3の発明によれば、急制動検出手段は、所定時間内でのブレーキペダルの移動量を検出するとともに、上記移動量が基準値以上のとき、コントローラが急制動と判断することとしたので、より早急に急制動を判断することができる。したがって、応答性を良好に保つことができる。
【0044】
第4の発明によれば、急制動検出手段は、所定時間内でのブレーキブースターの圧力上昇率を検出するとともに、上記圧力上昇率が基準値以上のとき、コントローラが急制動と判断することとしたので、より早急に急制動を判断することができる。したがって、応答性を良好に保つことができる。
【図面の簡単な説明】
【図1】実施形態のコントローラの通常制御の制御系を示すブロック図である。
【図2】従来例の回路図である。
【符号の説明】
8 パワーシリンダ
9 ステアリングバルブ
17 車速センサ
V 流量制御弁
P ポンプ
a 可変オリフィス
QP 制御流量
QT 戻り流量
C コントローラ
v 車速信号
Ia 急制動時ソレノイド電流指令値
Ib 基本ソレノイド電流指令値
Claims (4)
- パワーシリンダを制御するステアリングバルブと、このステアリングバルブの上流側に設けた可変オリフィスと、この可変オリフィスの開度を制御するソレノイドと、このソレノイド励磁電流を制御するコントローラと、ポンプから供給される流量を上記可変オリフィスの開度に応じてステアリングバルブに導く制御流量とタンクまたはポンプに環流させる戻り流量とに分配する流量制御弁と、車速を検出する車速センサと、車両の急制動を検出する急制動検出手段とを備え、上記コントローラは車速に基づいてソレノイド励磁電流の基礎となる基本ソレノイド電流指令値Ibを出力するとともに、上記急制動検出手段からの信号によって急制動と判断した場合には、急制動時ソレノイド電流指令値Iaを出力して、上記可変オリフィスの開度を相対的に大きくすることを特徴とするパワーステアリング装置。
- 急制動検出手段として車速センサを用い、コントローラは、所定時間内での車速の減少率が基準値以上のとき、急制動と判断することを特徴とする請求項1記載のパワーステアリング装置。
- 急制動検出手段は、所定時間内でのブレーキペダルの移動量を検出するとともに、コントローラは、上記移動量が基準値以上のとき、急制動と判断することを特徴とする請求項1記載のパワーステアリング装置。
- 急制動検出手段は、所定時間内でのブレーキブースターの圧力上昇率を検出するとともに、コントローラは、上記圧力上昇率が基準値以上のとき、急制動と判断することを特徴とする請求項1記載のパワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323761A JP3947704B2 (ja) | 2002-11-07 | 2002-11-07 | パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323761A JP3947704B2 (ja) | 2002-11-07 | 2002-11-07 | パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004155342A true JP2004155342A (ja) | 2004-06-03 |
| JP3947704B2 JP3947704B2 (ja) | 2007-07-25 |
Family
ID=32803548
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002323761A Expired - Lifetime JP3947704B2 (ja) | 2002-11-07 | 2002-11-07 | パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3947704B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006240317A (ja) * | 2005-02-28 | 2006-09-14 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2006264364A (ja) * | 2005-03-22 | 2006-10-05 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2006264363A (ja) * | 2005-03-22 | 2006-10-05 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2006315423A (ja) * | 2005-05-10 | 2006-11-24 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2007145175A (ja) * | 2005-11-28 | 2007-06-14 | Toyota Motor Corp | 車輌の走行制御装置 |
| JP2012046045A (ja) * | 2010-08-26 | 2012-03-08 | Kyb Co Ltd | パワーステアリング装置 |
| CN108674483A (zh) * | 2018-04-28 | 2018-10-19 | 东风商用车有限公司 | 一种电动液压助力转向制动系统及其控制方法 |
-
2002
- 2002-11-07 JP JP2002323761A patent/JP3947704B2/ja not_active Expired - Lifetime
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006240317A (ja) * | 2005-02-28 | 2006-09-14 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2006264364A (ja) * | 2005-03-22 | 2006-10-05 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2006264363A (ja) * | 2005-03-22 | 2006-10-05 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2006315423A (ja) * | 2005-05-10 | 2006-11-24 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP2007145175A (ja) * | 2005-11-28 | 2007-06-14 | Toyota Motor Corp | 車輌の走行制御装置 |
| JP2012046045A (ja) * | 2010-08-26 | 2012-03-08 | Kyb Co Ltd | パワーステアリング装置 |
| CN108674483A (zh) * | 2018-04-28 | 2018-10-19 | 东风商用车有限公司 | 一种电动液压助力转向制动系统及其控制方法 |
| CN108674483B (zh) * | 2018-04-28 | 2023-05-12 | 东风商用车有限公司 | 一种电动液压助力转向制动系统的控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3947704B2 (ja) | 2007-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH02226B2 (ja) | ||
| EP1331156B1 (en) | Power steering system | |
| JP3947704B2 (ja) | パワーステアリング装置 | |
| JP3689046B2 (ja) | パワーステアリング装置 | |
| JP3524463B2 (ja) | パワーステアリング装置 | |
| JP2861561B2 (ja) | 制動力制御装置 | |
| JP3524455B2 (ja) | パワーステアリング装置 | |
| EP1332947B1 (en) | Power steering system | |
| JPH07257336A (ja) | 制動力制御装置 | |
| JP3981622B2 (ja) | パワーステアリング装置 | |
| JP3548076B2 (ja) | パワーステアリング装置 | |
| JP3742785B2 (ja) | パワーステアリング装置 | |
| JP2002347643A (ja) | パワーステアリング装置 | |
| JP4619191B2 (ja) | パワーステアリング装置 | |
| KR0131567B1 (ko) | 자동차의 조향 제어장치 및 그의 제어방법 | |
| JP4566040B2 (ja) | パワーステアリング装置 | |
| JP4619152B2 (ja) | パワーステアリング装置 | |
| JP3737715B2 (ja) | パワーステアリング装置 | |
| JPH04243651A (ja) | 車両の制動力制御装置 | |
| JP2004155289A (ja) | 流量制御装置 | |
| JPH0737235B2 (ja) | 動力舵取装置 | |
| JPH01233168A (ja) | 車両用動力操舵装置の制御装置 | |
| JP2004155290A (ja) | 流量制御装置 | |
| JP2006151321A (ja) | パワーステアリング装置 | |
| JP2006264363A (ja) | パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070315 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070320 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070416 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100420 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110420 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110420 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120420 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130420 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130420 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140420 Year of fee payment: 7 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |