JP2004157017A - 衝突実験システム - Google Patents
衝突実験システム Download PDFInfo
- Publication number
- JP2004157017A JP2004157017A JP2002323061A JP2002323061A JP2004157017A JP 2004157017 A JP2004157017 A JP 2004157017A JP 2002323061 A JP2002323061 A JP 2002323061A JP 2002323061 A JP2002323061 A JP 2002323061A JP 2004157017 A JP2004157017 A JP 2004157017A
- Authority
- JP
- Japan
- Prior art keywords
- collision
- vehicle
- speed
- protective fence
- towing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000002474 experimental method Methods 0.000 title claims abstract description 24
- 238000013459 approach Methods 0.000 claims abstract description 15
- 230000001681 protective effect Effects 0.000 claims description 38
- 238000012360 testing method Methods 0.000 claims description 23
- 238000001514 detection method Methods 0.000 claims description 13
- 238000000926 separation method Methods 0.000 claims description 11
- 238000013461 design Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 11
- 229910000831 Steel Inorganic materials 0.000 description 10
- 239000010959 steel Substances 0.000 description 10
- 238000005259 measurement Methods 0.000 description 8
- 239000002023 wood Substances 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000010998 test method Methods 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images









Landscapes
- Regulating Braking Force (AREA)
- Refuge Islands, Traffic Blockers, Or Guard Fence (AREA)
Abstract
【解決手段】衝突車両と、当該衝突車両を衝突させる位置付近に設けた滑車と、当該滑車を背面位置として前記衝突車両を牽引する牽引車両と、前記衝突車両の前方と前記牽引車両の後方とを前記滑車を介して相互に結ぶロープとを有し、前記牽引車両の走行に伴って、前記衝突車両を牽引し、当該衝突車両を前記防護柵の所定の位置へ所定の衝突速度及び所定の進入角度で衝突させ、前記防護柵の対衝突実験を行うことを特徴とする衝突実験システム。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、近年開発された衝突対応型の木製防護柵やその他の防護柵、これら防護柵を支持するL形擁壁等の道路路側構造物の対衝突実験に適した衝突実験システムに関する。
【0002】
【従来の技術】
従来より、道路の路側に設置される防護柵は、社団法人日本道路協会の防護柵設置基準に従い、衝突実験による安全確認データを取り、安全確認した上で設置されなければならなかった。この試験システム(本実験)は、実車両又はそれと同等の車両モデルをウインチ等による特殊な牽引装置を用いて防護柵モデルに衝突させ、衝突速度、進入角度を適正に保ち、衝突車両が受ける加速度や進入角度、離脱速度を正確に測定し、かつ防護柵の破損状況を確認するというものである。このシステムは、相当大がかりで、設置コストも相当高く、民間レベルで容易に設置できるというものではない。加えて、防護柵の衝突実験は、単に車両を衝突させるだけでなく、対象物としての防護柵を支持する路側構造までが実状態で規定されていなければならず、1回当りに要する実験費用も莫大なものである。
【0003】
一方、近年、支柱への横架部分を波状鋼板に代えて木製、特に天然木材とする木製防護柵が開発された。天然資源の有効利用を図り、間伐材等の利用を積極的に進め、かつ街の美化を図る等の観点から、今脚光をあびている防護柵である。この木製防護柵にあっても、道路に設置する以上、通常防護柵用、衝突対応型として衝突実験を行い、安全確認データが取られなければならない。
【0004】
しかしながら、ここに大きな問題点がある。木製防護柵は、基本的には間伐材等天然木材を利用すると共に、景観重視で種々のデザインを施す等の関係から、デザイン、寸法、設計毎に衝突対応強度が変化し、各設計毎に衝突実験が必要となるということである。しかも、天然木材は、同一形状であっても品質に差異があることから、多数の実験データを取り、誤差を吸収して真に安全であることが確認されなければならない。
【0005】
このため、従来は、数々の設計毎に協会が定める実験システムに委託し、本実験を行わねばならず、それに要する費用が莫大となり、開発に支障を来たしていた。
【0006】
【発明が解決しようとする課題】
そこで、本発明は、上記従来技術に鑑みて、防護柵や、これらを支持する道路路側構造物の新規設計に対し、前記本実験に先立ち、比較的低コストで予備実験を行うことができる衝突実験システムを構築し、防護柵及び道路路側構造物の設計支援を行うことを目的とする。
【0007】
【課題を解決するための手段】
上記課題を解決するため本発明は、特許請求の範囲に記載の通り、実車両を無人で衝突対応型の防護柵モデルに衝突させ、防護柵や道路路側構造物の対衝突実験を行うための衝突実験システムであって、
無人の衝突車両と、当該衝突車両を衝突させる位置付近に設けた滑車と、当該滑車を背面位置として前記衝突車両を牽引する牽引車両と、前記衝突車両の前方と前記牽引車両の後方とを前記滑車を介して相互に結ぶロープとを有し、
前記牽引車両の走行に伴って、前記衝突車両を牽引し、当該衝突車両を前記防護柵の所定の位置へ所定の速度及び所定の進入角度で衝突させ、前記防護柵の対衝突実験を行うことを特徴とする。
【0008】
衝突車両と牽引車両とはロープ及び適数の滑車を介してU字状あるいはV字状に結ばれる。牽引車両の走行により、無人の衝突車両を防護柵に対して衝突させることができる。衝突車両の挙動は、各種センサやカメラ等で捉えることができ、進入角度や、離脱速度、衝突車両及び防護柵の破損程度等をデータ化し、評価できる。
【0009】
前記衝突車両が前記防護柵に衝突する寸前であることを検出する衝突寸前状態検出センサを設け、
前記牽引車両と前記ロープとの間には、前記衝突寸前検出センサの検出に基いて相互を離隔する相互離隔装置を設け、
前記衝突寸前状態検出センサの作動に基いて前記相互離隔装置を作動させ、前記牽引車両への衝撃を皆無とすることができる。即ち、牽引車両を有人とすることができ、安全に牽引できる。
【0010】
衝突寸前状態検出センサは、走行レーンの防護柵近くにテープスイッチや光電管リレーを用いることで構成できる。相互離隔装置は、電気信号によりマグネットやシリンダを作動させ、ロック解除し、ロープを離隔する等、様々に構成できる。ロープ途中に牽引力の1.05〜1.20倍で切断できるロープを介在させ、2重の安全手段とすることもできる。
【0011】
前記衝突車両の速度を検出する車速センサを設け、当該センサが検出した車両速度が予め定めた衝突速度を超えないよう前記衝突車両を制動する制動制御装置を設け、衝突速度を正確に定めることもできる。
【0012】
また、進入角度の誤差に基いて、前記衝突車両の操舵を行い、前記衝突車両の衝突位置及び進入角度を適切とすることもできる。
【0013】
衝突車両が小型車の場合には、前記衝突車両の走行レーンには、当該車両を目標位置に向けて案内するガイドレールを設け、衝突車両をレーンに沿って走行させ、進入角度を適切に定めることができる。
【0014】
【発明の実施の形態】
以下、添付図面を参照しつつ本発明の実施の形態を説明する。図1は、システム全体の平面配置図を示す。図2は、図1の防護柵付近の状態を詳細に示す斜視図、図3〜6は、各装置の構成例を示す説明図、図7は制御系の説明図である。
【0015】
図1及び図2において、本発明の衝突実験システム1は、無人の衝突車両2を有人の牽引車両3で牽引して防護柵4に衝突させ、防護柵4や道路路側構造物、例えばL形擁壁ブロック5の対衝突実験を行うための衝突実験システムである。
【0016】
衝突車両2と、牽引車両3とは、当該衝突車両2を衝突させる位置付近に設けた滑車6(6A、6B)と、鋼製ロープ7とを介して相互に結ばれ、牽引車両3を、衝突車両2と反対方向に走行させることにより、衝突車両2を防護柵4に対し衝突させるようになっている。前記牽引車両3の走行に伴って、前記衝突車両2を牽引し、当該衝突車両2を前記防護柵4の所定の位置P1へ、所定の衝突速度V1及び進入角度θ1で衝突させ、前記防護柵4やL型擁壁ブロック5の対衝突実験を行う。
【0017】
L型擁壁ブロック5は、断面L字形状に形成され、L字底部を道路内側に向けて地中に埋設されるものである。防護柵4は、前記L型擁壁ブロック5の天端面に複数の支柱8を立設し、各支柱間に上下一対の木材ビーム9(9U、9D)を横架して成る木製防護柵であるとする。
【0018】
前記防護柵4の前方(衝突車両2が位置する方向)には、衝突車両2の長さの1.5倍程度の位置に、衝突時の衝突車両の正確な速度を検出するための光電管リレースイッチS1、S2と、テープスイッチS3、S4とが配置されている。防護柵4の衝突位置P1には、応力度を測定するための変形ゲージによる加速度計g1が設けられている。光電管リレースイッチS1、S2は一定間隔、例えば2m離隔して一対配置され、両スイッチの作動時間の誤差に基いて衝突車両の車速が計算される。また、テープスイッチS3、S4は、衝突車両2が踏むことにより夫々作動され、各作動に基いて衝突車両2と鋼製ロープ7との間に設けた相互離隔装置10を作動させ、鋼製ロープ7を衝突車両2から外し、牽引車両3へ衝撃を与えないようにしている。テープスイッチS3、S4を2本設けたのは安全のためである。各テープスイッチは、本発明では、衝突寸前状態検出センサとして作用する。さらに、安全のため、各光電管リレースイッチS1、S2の作動信号を、衝突寸前状態検出センサの補動として利用することもできる。相互離隔装置10と鋼製ロープ7との間には、安全を更に確実とするため、牽引加重の1.05〜1.20倍で切断することのできる樹脂等で作った安全ロープ11が介在されている。
【0019】
前記防護柵4の後方には、高さ2〜3mの土盛りによる予防提12が設けられている。前記衝突車両2の走行するレーン13の側方には、計測制御盤14が設けられている。実験に必要な人員は、計測制御盤の横に1名、牽引車両3の運転に1名、予防提12の上でレーン13を走行する衝突車両2を目視し、リモートコントローラ15を操作する者1名の合計3名である。
【0020】
図3に示すように、衝突車両2には、衝突時の加速度を検出する加速度計g2と、衝突車両2の操舵を行うための衝突車両操舵装置16の本体と、制動制御装置の本体(シリンダ28)と、相互離隔装置10の本体が設けられている。衝突車両操舵装置16は、図4に示すように、ハンドルに軸を合わせて固定したプーリ17と、ギヤモータ18のプーリ19とをVベルト20で結合し、ギヤモータ18の正逆回転で操舵可能としたものである。ギヤモータ18は、図1又は図6に示すリモートコントローラ15で操作される。プーリ17、19をスプロケットとし、Vベルト20をタイミングベルトとすることもできる。
【0021】
図5は、前記相互離隔装置10の本体部分の詳細を拡大して示す側面図である。衝突車両2のシャーシ21の前方に特殊フック22を設け、鋼製ロープ7の一端に設けた牽引環23を前方側から引っ掛けるようにしている。特殊フック22は、牽引環23との接触面を、下方に行くほど前寄りの傾斜面としている。また、牽引環23が通常の牽引力で特殊フック22から外れることのないよう、前期特殊フック22に牽引環23を掛け止めた状態で、その下面を支持する牽引環支持体24を設け、これを前後に駆動するシリンダ25を設けている。従って、鋼製ロープ7に牽引力が加わっているとき、シリンダ25に空気を送り、支持体24を後退させることにより、牽引環23を特殊フック22から外すことができる。このための信号は、前記テープスイッチS3、S4、計測制御盤14に備えた手動緊急スイッチSW等による。
【0022】
図6に示すように、リモートコントローラ15の本体上部には、4個のレバー26A、26B、26C、26Dが突設され、その内部に信号生成し、無線信号を出力するラジコン制御部が内蔵されている。レバー26Aは、ハンドル右操作のためのものである。レバー26Bは、ハンドル左操作のためのものである。レバー26Cは衝突車両の制動制御のためのものである。レバー26Dは緊急用の非常停止のためのものである。従って、各レバーの操作により、右操舵信号HDR、左操舵信号HDL、制動信号BK、緊急信号EMを、衝突車両2に対して出力することができる。
【0023】
再度図3において、衝突車両2のブレーキペダル27には、制動制御装置の本体としてのエアーシリンダ28が設けられ、シリンダ28の作動で衝突車両2を制動可能となっている。
【0024】
図3〜6に示す装置構成により、衝突車両2を所定の衝突速度V1及び所定の進入角度θ1で所定の位置P1に衝突されることができる。これら衝突車両の速度及び角度を制御する体系を図7にまとめて示した。
【0025】
図7は、本発明の衝突実験システム1における制御系のブロック図である。図7において、衝突車両2には、アンテナ29と発信機30及び受信機31が設けられ、発信機30は、車速センサ32の検出信号を入力し、現在車速VVを出力することができる。また、受信機31は、操舵信号HDR、HDLを入力し、モータ18、プーリ17を介してハンドル操作することができると共に、制動信号BKや緊急停止の信号EM、緊急スイッチSWの信号を受けて、制動、停止することができる。緊急スイッチSWの信号、衝突寸前状態検出センサS3、S4の検出に基く相互離隔信号によっては、衝突車両2からロープ7を外すことができる。
【0026】
一方、前記計測制御盤14にも、アンテナ32と、発信機33、受信機34が設けられている。受信機34は、衝突車両2の車速センサ32が検出した信号Uを入力し、現在の車速VVを表示器35に表示することができる。発信機33は、緊急スイッチSWの信号を入力し、衝突車両2の相互離隔装置10を作動し、鋼製ロープ7を外すことができる。さらに、速度演算器36は、光電管リレースイッチS1、S2の信号に基いて衝突速度V1を算出し、表示器37に表示すると共に記録器38に記録する。
【0027】
以上により、図1に示す衝突車両2を防護柵4に適切に衝突されることができる。牽引車両3を衝突車両2と別方向に走行させるので、スペース最小にして安全で正確な実験を行うことができる。
【0028】
具体的に示すと、図1及び図2において、計測制御盤14の側面に1人、予防提12の上でレーン13を見こせる所にリモートコントローラ15を手に持った者が1名、そして牽引車両3を運転する運転者1名が居る。
【0029】
運転者が牽引車両3の運転を始めると、衝突車両2が防護柵4の目標位置P1を目指して走行開始する。衝突車両2の現在速度は、計測制御盤14に設けた表示器35に表示する。このとき、衝突車両2の牽引を容易とし、レーン長さを節約するため、衝突車両2の走行開始地点に10°程度のスロープを構成し、衝突車両2を自重で加速させることもできる。
【0030】
予防提12の上のリモートコントローラ15の操作者は、図6に示したリモートコントローラ15を用いて、表示器35の速度がオーバーすると、制動をかけることができる。また、衝突車両2がレーン13を外れないよう、目標位置P1に向かうようハンドルを操舵し、進入角度θ1を適切に保つことができる。
【0031】
衝突車両2がテープスイッチS3次いでS4を踏むと相互離隔信号SP1、SP2が発生し、相互離隔装置10が作動し、衝突車両2から鋼製ロープ7が外れ、衝突車両2は自走状態で対象物に衝突する。また、途中で必要があれば、計測制御盤14の緊急スイッチSWを押し、安全を確保する。
【0032】
光電管リレースイッチS1、S2の作動タイミングに基いて衝突車両速度V1は正確に計測され、表示器37に表示され、記録器38に記録される。
【0033】
衝突評価に必要な項目を表1に示す。表1は、車両用防護柵性能評価を行うための、衝突試験結果総括表である。表1において、衝突実験評価は、防護柵4の諸元や、車両条件(車種、重量、形式等)、その他衝突条件等の条件下で、進入角度θ1、衝突速度V1、衝突時の加速度g(最大値)、反射角θ2、離脱速度V2等所要データを採取しつつ行われる。防護柵4、並びに擁壁5部分の破損状況は、写真を撮り、一部数値で表現される。これらの評価は、協会設置基準に準じたものである。
【0034】
【表1】

【0035】
以上示した実施の形態では、衝突車両2の速度VV及び進入角度θ1を、リモートコントローラ15を用いて人の操作により行ったが、これは、自動化することも可能である。
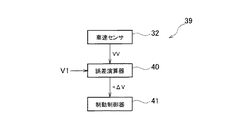
【0036】
図8は、衝突車両2の速度を制御するための車速制御装置39のブロック図である。図表のように、車速制御装置39は、車速センサ32と、誤差演算器40と、制動制御器41とから成る。設定された衝突速度V1と現在車速VVの差である誤差+ΔVに基いて、ブレーキを制御し、速度VVを一定に抑えることができる。
【0037】
図9は、衝突車両2の進入角度θ1を適切に保つための操舵制御装置42を示すブロック図である。CCDカメラ43で目標位置P1を常時撮像し、誤差演算器44が演算した誤差Δθに基いて、操舵制御器45を作動させ、目標位置P1を目指して操舵することができる。
【0038】
図10は、小型の衝突車両2に対し、走行レーン13上に設けたガイドレール46の説明図である。図示のように、衝突車両2のタイヤ47の両輪幅より僅かに大きな幅で高さH=10cm程度の立上げ部を有するガイドレール46を設け、衝突車両2を衝突位置P1に向けて走行させることができる。設置コストの都合等から、小型車両に限って設置できる。ガイドレール46を設けた場合には、図9に示す操舵制御装置42や図6に示すリモートコントローラ15による操舵制御は不要である。
【0039】
本発明は、上記実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で適宜設計的変更を行うことができ、各種態様で実施できる。
【0040】
【発明の効果】
以上の通り本発明は、防護柵に向けて衝突される衝突車両を滑車及びロープを介して牽引車両で、別の方向に牽引するので、少ないスペースで、安全、確実、容易に衝突実験を行うことができる。
【0041】
防護柵メーカが、自前で容易な設備、少ないスペースで容易に行うことができるので、多数の設計に対し適切設計を迅速に得ることができ、各設計毎に必要な本実験に必要な費用を大幅に節約できる。
【0042】
衝突車両と牽引車両との間には、衝突寸前に相互を離隔する相互離隔装置を設けているので、衝突時、牽引車両に大きな衝撃を与えることがなく、牽引車両を安全に有人で運転することができる。また、衝突時、両車両を切り離すこととなるので、衝突速度を実際衝突状況に近い形で防護柵に衝突させることができる。
【0043】
衝突位置に向う走行レーンに衝突車両のタイヤを案内するガイドレールを設ける場合には、操舵制御装置を省略して衝突車両を予定の位置へ適切な進入角度で衝突させることができる。
【図面の簡単な説明】
【図1】本発明の一実施形態に係る衝突実験システムの全体構成を示す配置図である。
【図2】本発明の一実施形態に係る衝突実験システムの防護柵付近の詳細を示す斜視図である。
【図3】衝突車両に各装置を搭載した状態を示す説明図である。
【図4】衝突車両操舵装置の本体構造を示す平面図である。
【図5】相互離隔装置の本体部分の詳細を示す断面側面図である。
【図6】リモートコントローラの側面図である。
【図7】本発明の衝突実験システムにおける制御系のブロック図である。
【図8】本発明の他の実施形態に係る車速制御装置を示すブロック図である。
【図9】同じく他の実施形態に係る操舵制御装置のブロック図である。
【図10】本発明の他の実施形態に係るガイドレールの断面図である。
【符号の説明】
1 衝突実験システム
2 衝突車両
3 牽引車両
4 防護柵
5 L型擁壁ブロック
6(6A、6B)滑車
7 鋼製ロープ
8 支柱
9(9U、9D)木材ビーム
10 相互離隔装置
11 安全ロープ
12 予防提
13 走行レーン
14 計測制御盤
15 リモートコントローラ
16 操舵装置
17、19 プーリ
18 ギヤモータ
20 Vベルト
21 シャーシ
22 特殊フック
23 牽引環
24 牽引環支持
25、28 シリンダ
26A、26B、26C、26D レバー
27 ブレーキペダル
29、32 アンテナ
30、33 発信機
31、34 受信機
35、37 表示器
36 衝突速度演算器
38 記録器
39 車速制御装置
40、44 誤差演算器
41 制動制御器
42 操舵制御装置
43 CCDカメラ
45 操舵制御器
46 ガイドレール
47 タイヤ
S1、S2 光電管リレースイッチ
S3、S4 テープスイッチ(衝突寸前状態検出センサ)
g1、g2 加速時計
HDR 右操舵信号
HDL 左操舵信号
BK 制動信号
EM 緊急信号
SPi(i=1、2) 相互離隔信号
SW 緊急スイッチ
H 立上げ高さ
Claims (5)
- 実車両を無人で衝突対応型の防護柵モデルに衝突させ、防護柵や道路路側構造物の対衝突実験を行うための衝突実験システムであって、
無人の衝突車両と、当該衝突車両を衝突させる位置付近に設けた滑車と、当該滑車を背面位置として前記衝突車両を牽引する牽引車両と、前記衝突車両の前方と前記牽引車両の後方とを前記滑車を介して相互に結ぶロープとを有し、
前記牽引車両の走行に伴って、前記衝突車両を牽引し、当該衝突車両を前記防護柵の所定の位置へ所定の衝突速度及び所定の進入角度で衝突させ、前記防護柵の対衝突実験を行うことを特徴とする衝突実験システム。 - 前記衝突車両が前記防護柵に衝突する寸前であることを検出する衝突寸前状態検出センサを設け、
前記牽引車両と前記ロープとの間には、前記衝突寸前検出センサの検出に基いて相互を離隔する相互離隔装置を設け、
前記衝突寸前状態検出センサの作動に基いて前記相互離隔装置を作動させ、前記牽引車両への衝撃を皆無としたことを特徴とする請求項1記載の衝突実験システム。 - 前記衝突車両の速度を検出する車速センサを設け、当該センサが検出した車両速度が予め定めた衝突速度を超えないよう前記衝突車両を制動する制動制御装置を設けたことを特徴とする請求項1記載の衝突実験システム。
- 前記衝突車両の前記防護柵に対する進入角度の誤差に基いて、前記衝突車両の操舵を行い、前記衝突車両の衝突位置及び進入角度を適切とする衝突車両操舵装置を設けたことを特徴とする請求項1記載の衝突実験システム。
- 前記衝突車両が小型車の場合、前記衝突車両の走行レーンには、当該車両を目標位置に向けて案内するガイドレールを設けたことを特徴とする請求項1記載の衝突実験システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323061A JP4178018B2 (ja) | 2002-11-06 | 2002-11-06 | 衝突実験システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323061A JP4178018B2 (ja) | 2002-11-06 | 2002-11-06 | 衝突実験システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004157017A true JP2004157017A (ja) | 2004-06-03 |
| JP4178018B2 JP4178018B2 (ja) | 2008-11-12 |
Family
ID=32803064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002323061A Expired - Lifetime JP4178018B2 (ja) | 2002-11-06 | 2002-11-06 | 衝突実験システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4178018B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103389214A (zh) * | 2013-07-24 | 2013-11-13 | 厦门理工学院 | 利用无人驾驶技术的汽车碰撞试验方法 |
| CN108133645A (zh) * | 2017-12-18 | 2018-06-08 | 安徽工程大学 | 一种冲击实验装置及实验方法 |
| CN111401678A (zh) * | 2020-01-19 | 2020-07-10 | 北京华路安交通科技有限公司 | 一种用于护栏安全性能评价的车辆模型验证系统及方法 |
| JP2020144015A (ja) * | 2019-03-07 | 2020-09-10 | ケイコン株式会社 | 防護柵衝突実験方法 |
| CN116839928A (zh) * | 2023-06-05 | 2023-10-03 | 中汽研汽车检验中心(广州)有限公司 | 整车气囊误作用试验方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6097877B1 (ja) * | 2016-12-12 | 2017-03-15 | 株式会社シビル | 衝撃実験装置及び衝撃実験方法 |
| JP6139040B1 (ja) * | 2017-01-06 | 2017-05-31 | 株式会社シビル | 走行パレットへ搭載する重錘の搭載構造 |
-
2002
- 2002-11-06 JP JP2002323061A patent/JP4178018B2/ja not_active Expired - Lifetime
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103389214A (zh) * | 2013-07-24 | 2013-11-13 | 厦门理工学院 | 利用无人驾驶技术的汽车碰撞试验方法 |
| CN108133645A (zh) * | 2017-12-18 | 2018-06-08 | 安徽工程大学 | 一种冲击实验装置及实验方法 |
| JP2020144015A (ja) * | 2019-03-07 | 2020-09-10 | ケイコン株式会社 | 防護柵衝突実験方法 |
| CN111401678A (zh) * | 2020-01-19 | 2020-07-10 | 北京华路安交通科技有限公司 | 一种用于护栏安全性能评价的车辆模型验证系统及方法 |
| CN111401678B (zh) * | 2020-01-19 | 2024-03-05 | 北京华路安交通科技有限公司 | 一种用于护栏安全性能评价的车辆模型验证系统及方法 |
| CN116839928A (zh) * | 2023-06-05 | 2023-10-03 | 中汽研汽车检验中心(广州)有限公司 | 整车气囊误作用试验方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4178018B2 (ja) | 2008-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2475568B1 (de) | Verfahren zur unterstützung eines fahrers eines fahrzeugs beim einparken oder ausparken | |
| US8621918B2 (en) | Test device comprising a receiving device for a vehicle mock-up and method for testing a test vehicle using a test device | |
| KR101214916B1 (ko) | 차량 탑재부에 대한 높이 제한 경고장치 | |
| CN103940572B (zh) | 轨道车辆实车撞击试验系统 | |
| CN109629470B (zh) | 山区双车道弯道主动预警式防撞护栏及追尾预警方法 | |
| KR100917051B1 (ko) | 주행차량의 교통정보산출장치 및 그 산출방법 | |
| CN103389214B (zh) | 利用无人驾驶技术的汽车碰撞试验方法 | |
| JP2004157017A (ja) | 衝突実験システム | |
| CN106193711A (zh) | 立体自行车库 | |
| CN102338876A (zh) | 一种汽车防撞激光雷达系统处理告警信息的方法及装置 | |
| CN203165215U (zh) | 高速公路安全行车监测系统 | |
| KR101731341B1 (ko) | 과적 차량 무인 단속 시스템 | |
| CN204870742U (zh) | 车辆驾驶转弯视野盲区的辅助显示及警示系统和车辆 | |
| KR101418204B1 (ko) | 차량 방호울타리 시험용 무인차량 구동장비 | |
| CN112903305B (zh) | 一种汽车紧急避障能力测试评价方法 | |
| CN107914600B (zh) | 道路标线坐标自动采集设备、采集控制方法及控制装置 | |
| CN205898475U (zh) | 避障报警检测装置 | |
| CN206589874U (zh) | 车辆的泊车系统及车辆 | |
| CN217419426U (zh) | 一种车辆拦截道闸 | |
| JP2003139648A (ja) | 走行車両の追突試験方法、及び車両衝突試験装置 | |
| CN118618419A (zh) | 车辆的行驶控制装置 | |
| KR20230129099A (ko) | 전동화 자동차 및 그를 위한 운전 제어 방법 | |
| CN120646475B (zh) | 一种可兼容agv和架台车的运输轨道及其通行调控方法 | |
| CN111139699A (zh) | 一种高速公路车辆掉头系统 | |
| CN217155562U (zh) | 一种高速公路计重系统防作弊装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051021 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080812 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080825 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4178018 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130829 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |